Безпілотний багатомоторний вертоліт
Номер патенту: 103209
Опубліковано: 10.12.2015
Автори: Харченко Володимир Петрович, Матійчик Михайло Петрович, Рибальченко Олександр Сергійович


Формула / Реферат
Безпілотний багатомоторний вертоліт, який містить шість електродвигунів з повітряними гвинтами, кожен з яких окремо встановлений на кінцях несучих балок-променів, що нерухомо закріплені на центральному тілі, та опори шасі, які нерухомо закріплені на несучих балках-променях, який відрізняється тим, що несучі балки-промені шарнірно закріплені біля центрального тіла і для транспортування повертаються разом з двигунами вниз близько до вертикалі, а опори шасі виконані з дискретно регульованою висотою.
Текст
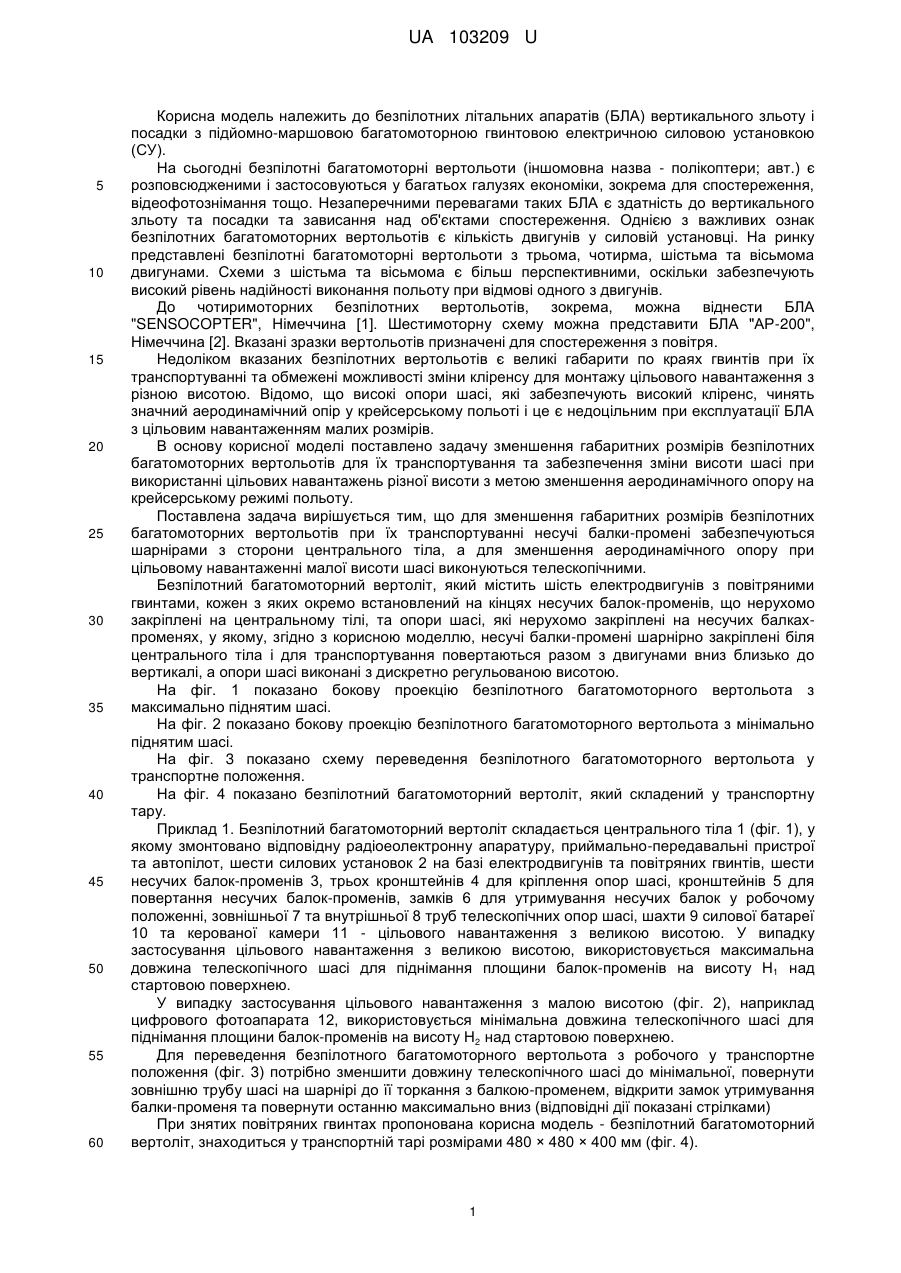
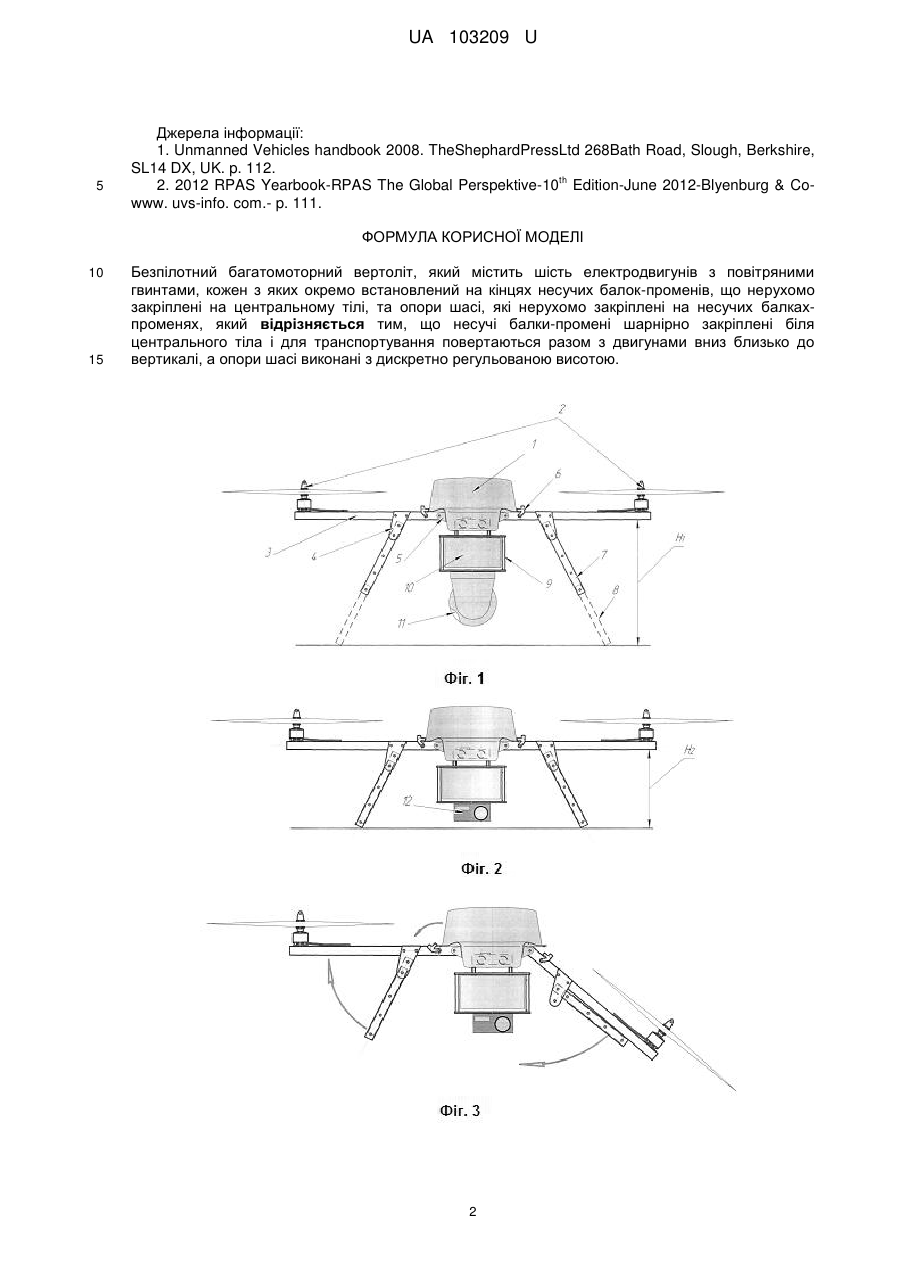
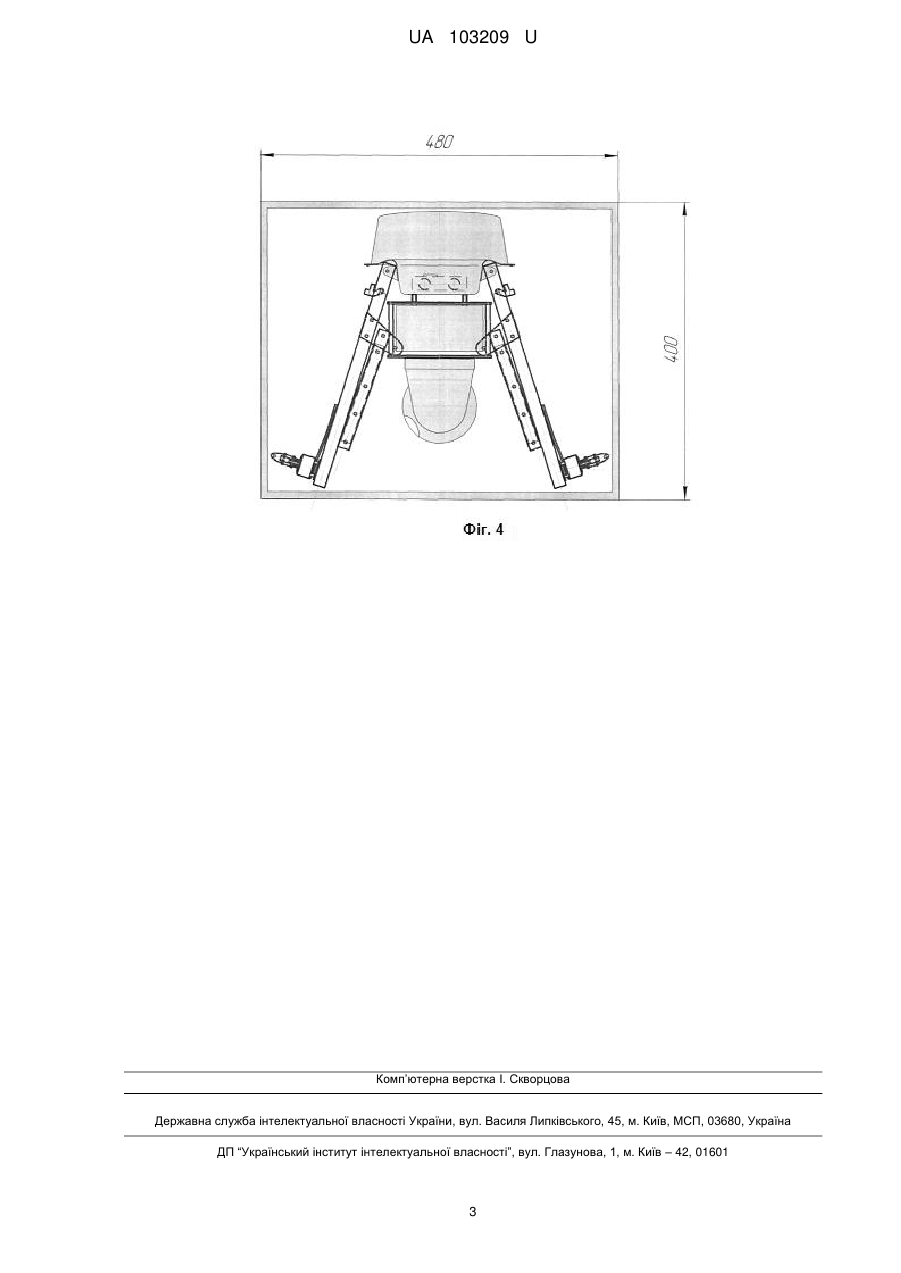
Реферат: UA 103209 U UA 103209 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до безпілотних літальних апаратів (БЛА) вертикального зльоту і посадки з підйомно-маршовою багатомоторною гвинтовою електричною силовою установкою (СУ). На сьогодні безпілотні багатомоторні вертольоти (іншомовна назва - полікоптери; авт.) є розповсюдженими і застосовуються у багатьох галузях економіки, зокрема для спостереження, відеофотознімання тощо. Незаперечними перевагами таких БЛА є здатність до вертикального зльоту та посадки та зависання над об'єктами спостереження. Однією з важливих ознак безпілотних багатомоторних вертольотів є кількість двигунів у силовій установці. На ринку представлені безпілотні багатомоторні вертольоти з трьома, чотирма, шістьма та вісьмома двигунами. Схеми з шістьма та вісьмома є більш перспективними, оскільки забезпечують високий рівень надійності виконання польоту при відмові одного з двигунів. До чотиримоторних безпілотних вертольотів, зокрема, можна віднести БЛА "SENSOCOPTER", Німеччина [1]. Шестимоторну схему можна представити БЛА "АР-200", Німеччина [2]. Вказані зразки вертольотів призначені для спостереження з повітря. Недоліком вказаних безпілотних вертольотів є великі габарити по краях гвинтів при їх транспортуванні та обмежені можливості зміни кліренсу для монтажу цільового навантаження з різною висотою. Відомо, що високі опори шасі, які забезпечують високий кліренс, чинять значний аеродинамічний опір у крейсерському польоті і це є недоцільним при експлуатації БЛА з цільовим навантаженням малих розмірів. В основу корисної моделі поставлено задачу зменшення габаритних розмірів безпілотних багатомоторних вертольотів для їх транспортування та забезпечення зміни висоти шасі при використанні цільових навантажень різної висоти з метою зменшення аеродинамічного опору на крейсерському режимі польоту. Поставлена задача вирішується тим, що для зменшення габаритних розмірів безпілотних багатомоторних вертольотів при їх транспортуванні несучі балки-промені забезпечуються шарнірами з сторони центрального тіла, а для зменшення аеродинамічного опору при цільовому навантаженні малої висоти шасі виконуються телескопічними. Безпілотний багатомоторний вертоліт, який містить шість електродвигунів з повітряними гвинтами, кожен з яких окремо встановлений на кінцях несучих балок-променів, що нерухомо закріплені на центральному тілі, та опори шасі, які нерухомо закріплені на несучих балкахпроменях, у якому, згідно з корисною моделлю, несучі балки-промені шарнірно закріплені біля центрального тіла і для транспортування повертаються разом з двигунами вниз близько до вертикалі, а опори шасі виконані з дискретно регульованою висотою. На фіг. 1 показано бокову проекцію безпілотного багатомоторного вертольота з максимально піднятим шасі. На фіг. 2 показано бокову проекцію безпілотного багатомоторного вертольота з мінімально піднятим шасі. На фіг. 3 показано схему переведення безпілотного багатомоторного вертольота у транспортне положення. На фіг. 4 показано безпілотний багатомоторний вертоліт, який складений у транспортну тару. Приклад 1. Безпілотний багатомоторний вертоліт складається центрального тіла 1 (фіг. 1), у якому змонтовано відповідну радіоеолектронну апаратуру, приймально-передавальні пристрої та автопілот, шести силових установок 2 на базі електродвигунів та повітряних гвинтів, шести несучих балок-променів 3, трьох кронштейнів 4 для кріплення опор шасі, кронштейнів 5 для повертання несучих балок-променів, замків 6 для утримування несучих балок у робочому положенні, зовнішньої 7 та внутрішньої 8 труб телескопічних опор шасі, шахти 9 силової батареї 10 та керованої камери 11 - цільового навантаження з великою висотою. У випадку застосування цільового навантаження з великою висотою, використовується максимальна довжина телескопічного шасі для піднімання площини балок-променів на висоту Н1 над стартовою поверхнею. У випадку застосування цільового навантаження з малою висотою (фіг. 2), наприклад цифрового фотоапарата 12, використовується мінімальна довжина телескопічного шасі для піднімання площини балок-променів на висоту Н2 над стартовою поверхнею. Для переведення безпілотного багатомоторного вертольота з робочого у транспортне положення (фіг. 3) потрібно зменшити довжину телескопічного шасі до мінімальної, повернути зовнішню трубу шасі на шарнірі до її торкання з балкою-променем, відкрити замок утримування балки-променя та повернути останню максимально вниз (відповідні дії показані стрілками) При знятих повітряних гвинтах пропонована корисна модель - безпілотний багатомоторний вертоліт, знаходиться у транспортній тарі розмірами 480 × 480 × 400 мм (фіг. 4). 1 UA 103209 U 5 Джерела інформації: 1. Unmanned Vehicles handbook 2008. TheShephardPressLtd 268Bath Road, Slough, Berkshire, SL14 DX, UK. p. 112. th 2. 2012 RPAS Yearbook-RPAS The Global Perspektive-10 Edition-June 2012-Blyenburg & Cowww. uvs-info. com.- p. 111. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Безпілотний багатомоторний вертоліт, який містить шість електродвигунів з повітряними гвинтами, кожен з яких окремо встановлений на кінцях несучих балок-променів, що нерухомо закріплені на центральному тілі, та опори шасі, які нерухомо закріплені на несучих балкахпроменях, який відрізняється тим, що несучі балки-промені шарнірно закріплені біля центрального тіла і для транспортування повертаються разом з двигунами вниз близько до вертикалі, а опори шасі виконані з дискретно регульованою висотою. 2 UA 103209 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюUnmanned many engine helicopter
Автори англійськоюMatiichyk Mykhailo Petrovych, Kharchenko Volodymyr Petrovych, Rybalchenko Oleksandr Serhiyovych
Назва патенту російськоюБеспилотный многомоторный вертолет
Автори російськоюМатийчик Михаил Петрович, Харченко Владимир Петрович, Рыбальченко Александр Сергеевич
МПК / Мітки
МПК: B64C 29/00
Мітки: безпілотний, багатомоторний, вертоліт
Код посилання
<a href="https://ua.patents.su/5-103209-bezpilotnijj-bagatomotornijj-vertolit.html" target="_blank" rel="follow" title="База патентів України">Безпілотний багатомоторний вертоліт</a>
Вертоліт безпосередньої вогневої підтримки
Номер патенту: 67325
Опубліковано: 15.06.2004
Автори: Куровська Тетяна Юріївна, Мосов Сергій Петрович, Комаров Володимир Олександрович, Микитюк Олександр Григорович
МПК: B64C 27/00
Мітки: безпосередньо, вертоліт, підтримки, вогневої
Формула / Реферат:
Вертоліт безпосередньої вогневої підтримки, що містить фюзеляж з кабіною екіпажу в його передній частині і хвостову балку з вертикальним оперенням на кінці останньої, рульовий гвинт, розташований на вертикальному оперенні, двигуни, з'єднані через редуктор і трансмісію, що проходить по балці, з несучим і рульовим гвинтами, стабілізатор, установлений на вертикальному оперенні хвостової балки, крило, розташоване на фюзеляжі, шасі, виконане...
Бойовий вертоліт

Номер патенту: 67326
Опубліковано: 15.06.2004
Автори: Куровська Тетяна Юріївна, Комаров Володимир Олександрович, Микитюк Олександр Григорович, Мосов Сергій Петрович
МПК: B64C 27/00
Формула / Реферат:
Бойовий вертоліт, що містить фюзеляж із кабінами екіпажу в передній частині і вантажним відсіком у центральній частині, хвостову балку з рульовим гвинтом, двигуни, сполучені через редуктор із несучим гвинтом і трансмісією з рульовим гвинтом, крило, установлене на фюзеляжі, висувне шасі із носовим колесом, системи забезпечення і паливопостачання, озброєння, розташоване на фюзеляжі і на зовнішніх підвісках під крилом, який відрізняється тим, що...
Безпілотний літальний апарат

Номер патенту: 62862
Опубліковано: 26.09.2011
Автори: Харченко Володимир Петрович, Священко Юрій Іванович
МПК: B64C 25/00
Мітки: безпілотний, літальний, апарат
Формула / Реферат:
1. Безпілотний літальний апарат, що містить крило з профілем заданої кривизни з нервюрами, закрилок, скидний візок шасі з ресорою-амортизатором, колесами, який відрізняється тим, що закрилок виконаний жорстко зв'язаним з поздовжніми елементами, закріпленими нерухомо на ресорі-амортизаторі, а на закрилку зверху під нервюрами крила встановлені ребра, що повторюють кривизну нервюри крила своєю верхньою частиною.2. Пристрій за п. 1, який...
Легкий багатоцільовий вертоліт

Номер патенту: 1558
Опубліковано: 16.12.2002
Автори: Тюрин Сергій Володимирович, Кучин Михайло Юрійович, Банних Віктор Іванович
МПК: B64C 27/00
Мітки: легкий, багатоцільовий, вертоліт
Формула / Реферат:
1. Легкий багатоцільовий вертоліт, що містить фюзеляж, несучий гвинт та рульовий дволопатевий гвинт, кожний з яких складається з лопатей і втулки, причому лопаті виконані з композиційного матеріалу, поршневийчотирициліндровий бензиновий двигун із системою охолодження, трансмісію, яка має головний і хвостовий редуктори та трансмісійні вали, які з'єднують двигуни з головним редуктором, та головний редуктор з редуктором головного гвинта,...
Трансформований безпілотний літальний апарат
Номер патенту: 92251
Опубліковано: 11.10.2010
Автори: Добреля Володимир Антонович, Прийменко Владислав Олександрович, Єфимов Олександр Євгенович
МПК: B64C 1/00, B64C 37/00, B64C 3/00
Мітки: апарат, трансформований, літальний, безпілотний
Формула / Реферат:
Трансформований безпілотний літальний апарат, що включає корпус, крила, хвостове оперення, силовий агрегат з паливним баком, цільове навантаження та тристійкове шасі, який відрізняється тим, що корпус складається із змінного центрального модуля, виконаного у вигляді центроплана, до якого спереду закріплена змінна головна частина з передньою стійкою шасі, позаду центроплана встановлено змінний модуль силового агрегату з двигуном, у верхній...
Попередній патент: Фосфід-індієвий діод ганна
Наступний патент: Переносний пусковий пристрій для безпілотного літального апарата
Випадковий патент: Монтажно-випробувальний корпус ракети