Мультироторний конвертоплан дискольотного типу (дисколіт) із полікоптерним алгоритмом керування польотом за о.о. нахабою
Формула / Реферат
Мультироторний конвертоплан дискольотного типу (дисколіт) із полікоптерним алгоритмом керування польотом, що має функцію вертикального зльоту та посадки, який відрізняється тим, що до параболічного (куполоподібного) крила дискольота форми двовипуклої лінзи 1 по всій його площині, прикріплені двигуни вертикального зльоту (вертикальної тяги) 2 (у даному випадку їх вісім, але їх кількість, при необхідності, збільшують до будь-якого числа, кратного чотирьом), що направлені догори та до передньої частини (тобто поздовжня вісь двигунів вертикального зльоту 5 розташована під кутом 60 градусів до поздовжньої осі 4 дискольота (в залежності від потреб у максимальному прискоренні дискольота даний кут змінюють з 10 градусів до 80 градусів), половина двигунів вертикального зльоту обертається за годинниковою стрілкою, друга половина обертається проти годинникової стрілки (для компенсації обертання за віссю рискання), як шасі використовуються чотири телескопічні опори 9, при цьому передні дві опори більш довгі, ніж задні дві опори, таким чином, що при стоянці на Землі поздовжня вісь дискольота знаходиться під певним (від 10 градусів - до 80 градусів) кутом до площини Землі 6 (частіше під кутом 30 градусів), а передня частина дискольота (ніс) знаходиться вище його задньої частини - хвоста (при необхідності кількість телескопічних опор збільшують в залежності від розмірів та ваги дискольота), якщо дисколіт не дуже сильно завантажений, і якщо необхідні великі прискорення (наприклад для швидкісного та високоманевреного дискольота) двигуни вертикального зльоту направлені максимально до передньої частини (під кутом 10-45 градусів до поздовжньої осі дискольота), а кут між поздовжньою віссю дискольота 4 та площиною Землі 6 при стоянці та зльоті дорівнює 80-45 градусів, якщо дисколіт сильно завантажений, і якщо не потрібні великі прискорення (наприклад для вантажного транспортного дискольота) - двигуни вертикального зльоту навпаки направлені максимально доверху (під кутом 45-80 градусів до поздовжньої осі літака), а кут між поздовжньою віссю дискольота та площиною Землі 8 при стоянці та зльоті дорівнює 45-10 градусів, в залежності від сфери застосування даного транспортного засобу, використовують поршневі, турбовентиляторні, турбореактивні, електричні та електроімпелерні двигуни, конструкція даного літального апарата дозволяє легко замінити більш старі модифікації двигунів на принципово нові (іонні, плазмові, гравітаційні, фотонні, квантові та ін.).
Текст
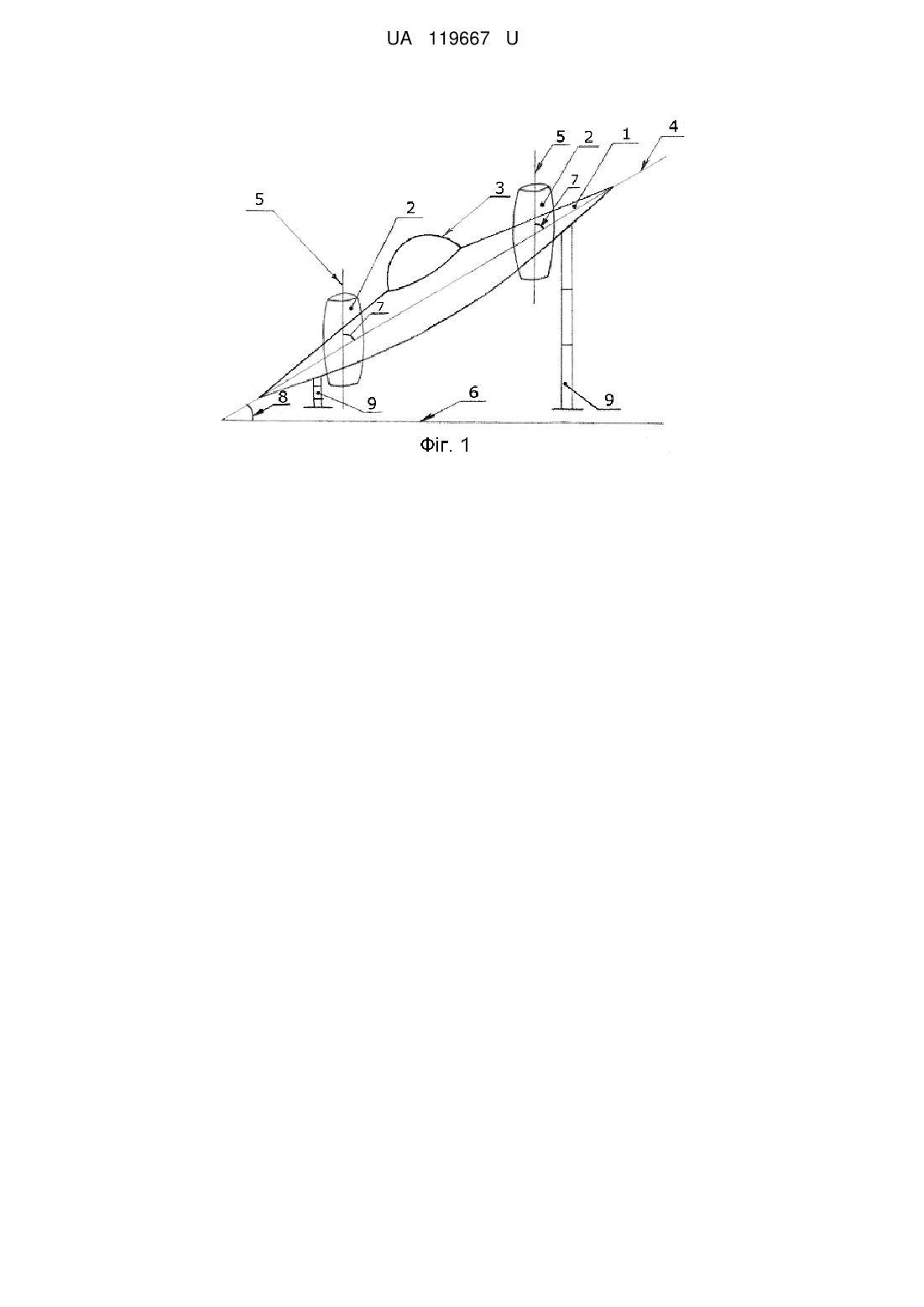
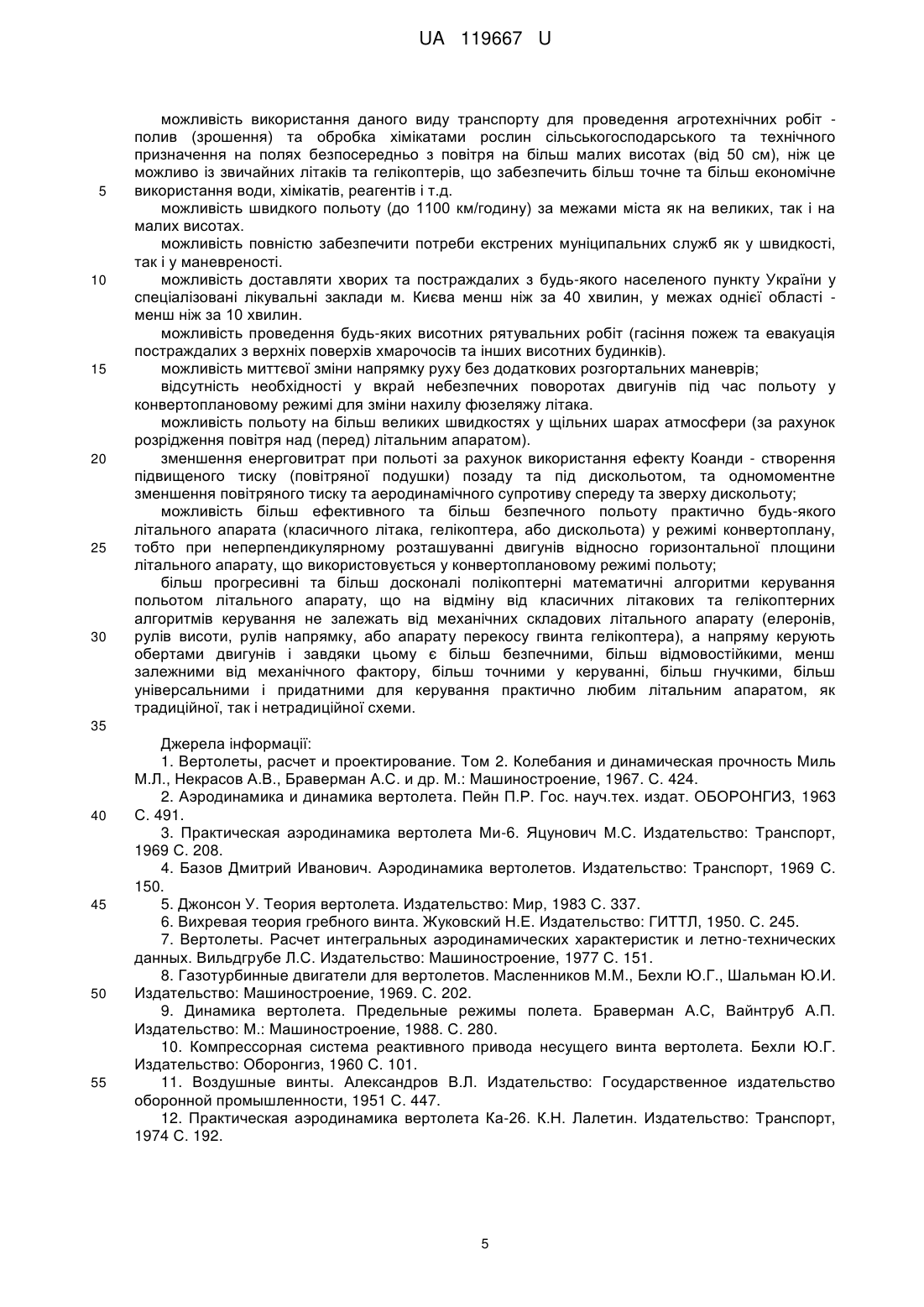
Реферат: Мультироторний конвертоплан дискольотного типу (дисколіт) із полікоптерним алгоритмом керування польотом має функцію вертикального зльоту та посадки. До параболічного (куполоподібного) крила дискольота форми двовипуклої лінзи по всій його площині, прикріплені двигуни вертикального зльоту (вертикальної тяги), що направлені догори та до передньої частини тобто поздовжня вісь двигунів вертикального зльоту 5 розташована під кутом 60 градусів до поздовжньої осі дискольота, половина двигунів вертикального зльоту обертається за годинниковою стрілкою, друга половина обертається проти годинникової стрілки, як шасі використовуються чотири телескопічні опори. При цьому передні дві опори більш довгі, ніж задні дві опори, таким чином, що при стоянці на Землі поздовжня вісь дискольота знаходиться під певним (від 10 градусів - до 80 градусів) кутом до площини Землі (частіше під кутом 30 градусів), а передня частина дискольота (ніс) знаходиться вище його задньої частини - хвоста, якщо дисколіт не дуже сильно завантажений, і якщо необхідні великі прискорення (наприклад для швидкісного та високоманевреного дискольота) двигуни вертикального зльоту направлені максимально до передньої частини (під кутом 10-45 градусів до поздовжньої осі дискольота), а кут між поздовжньою віссю дискольота та площиною Землі при стоянці та зльоті дорівнює 80-45 градусів, якщо дисколіт сильно завантажений, і якщо не потрібні великі прискорення (наприклад для вантажного транспортного дискольота) - двигуни вертикального зльоту навпаки направлені максимально доверху (під кутом 45-80 градусів до поздовжньої осі літака), а кут між поздовжньою віссю дискольота та площиною Землі 8 при стоянці та зльоті дорівнює 45-10 градусів, в залежності від сфери застосування даного транспортного засобу. UA 119667 U (54) МУЛЬТИРОТОРНИЙ КОНВЕРТОПЛАН ДИСКОЛЬОТНОГО ТИПУ (ДИСКОЛІТ) ІЗ ПОЛІКОПТЕРНИМ АЛГОРИТМОМ КЕРУВАННЯ ПОЛЬОТОМ ЗА О.О. НАХАБОЮ UA 119667 U UA 119667 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до транспортної галузі, а саме до авіаційної техніки і може бути використана для транспортування пасажирів, вантажів та спецтехніки на різних висотах, як на малих швидкостях (високоточне маневрування у межах щільно населених міських кварталів), так і на великих швидкостях (міжміські, міжобласні, міжнародні та міжконтинентальні сполучення). У зв'язку із вищевказаними технічними перевагами, даний літальний апарат ідеально підходить для використання у сучасній санітарній авіації (доставці хворих із невідкладною патологією, постраждалих від ДТП та катастроф, а також поранених з місця подій одразу до медичних центрів 4 рівня для надання одразу спеціалізованої медичної допомоги, уникаючи усі попередні ланки надання медичної допомоги), підходить для використання у пожежній службі (для гасіння пожеж у самих важкодоступних ділянках міських густонаселених кварталів), у структурах МВС (для виконання екстрених вильотів співробітників міліції на місце скоєння злочину та для ефективного затримання або переслідування із подальшим затриманням будь-якої наземної, надводної або повітряної цілі), у структурах МНС (для проведення оперативно-рятувальних робіт), для проведення антитерористичних спецоперацій, підходить для охорони морських судів від морських піратів (служба охорони корабля знаходиться на даному апараті на верхній палубі, у разі нападу - зльот та знищення усіх піратських цілей з повітря), та для інших галузей де необхідна екстрена доставка пасажирів, вантажів та спецтехніки на великі відстані на великій швидкості як на великих, так і на малих висотах. За останні 10 років значно збільшився інтерес громадянських та військових до літальних апаратів із вертикальним зльотом-посадкою та високоточним маневруванням у складних умовах польоту, для вирішення самих різних задач (від аерофотовідеоз'йомки та автоматичної доставки вантажів різного призначення - до перевезення пасажирів у несприятливі для посадки звичайних літаків ділянки та проведення складних рятувальних операцій по евакуації постраждалих із самих небезпечних місць ДТП, катастроф, надзвичайних ситуацій або зон збройних конфліктів). Серед відомих видів літальних апаратів, мультироторні літальні апарати із полікоптерним алгоритмом керування польотом є найбільш новими та найменш вивченими і вдосконаленими літальними засобами. На відміну від інших видів літальних апаратів, мультироторні літальні апарати із полікоптерним алгоритмом керування мають наступні відмінності та переваги: можливість найбільш плавного вертикального зльоту та посадки; можливість майже нерухомого зависання у повітрі на різних висотах; можливість "ювелірно" точного маневрування на різних висотах; можливість миттєвої зміни напрямку руху без додаткових розгортальних маневрів; можливість польоту на більш великих швидкостях у щільних шарах атмосфери (за рахунок розрідження повітря над (перед) літальним апаратом); можливість більш ефективного та більш безпечного польоту практично будь-якого літального апарата (класичного літака, гелікоптера, або дискольота) у режимі конвертоплану, тобто при неперпендикулярному розташуванні двигунів відносно горизонтальної площини літального апарата, що використовується у конвертоплановому режимі польоту. Більшість цих переваг пов'язана із наступними технічними особливостями: великою кількістю точок опору у повітрі (тобто великою кількістю двигунів вертикального зльоту (вертикальної тяги); додатковими можливостями куполоподібного (параболічного) дискольотного крила форми двовипуклої лінзи, а саме наявністю ефекту Коанди (що полягає у зменшені повітряного тиску і аеродинамічного супротиву над дискольотом і збільшенні повітряного тиску і підйомної сили під дискольотом); більш прогресивними та більш досконалими полікоптерними математичними алгоритмами керування польотом літального апарата, що на відміну від класичних літакових та гелікоптерних алгоритмів керування не залежать від механічних складових літального апарата (елеронів, рулів висоти, рулів напрямку або апарата перекосу гвинта гелікоптера), а напрямом керують обертами двигунів і завдяки цьому є більш безпечними, більш відмовостійкими, менш залежними від механічного фактора, більш точними у керуванні, більш гнучкими, більш універсальними і придатними для керування практично будь-яким літальним апаратом як традиційної, так і нетрадиційної схеми. Якщо проаналізувати усі можливі види транспорту, то можна умовно їх поділити на 3 основних групи: 1) транспорт із одним ступенем свободи переміщення у просторі (одновимірне переміщення по ламаній лінії) - автомобільний та залізничний транспорт. 1 UA 119667 U 5 10 15 20 25 30 35 40 45 50 55 60 2) транспорт із двома ступенями свободи переміщення у просторі (двовимірне переміщення у просторі у межах однієї площини) - річний, морський, океанічний транспорт, снігоходи, транспорт на повітряних подушках, екраноплани. 3) транспорт із трьома ступенями свободи переміщення у просторі (тривимірне переміщення у просторі) - підводний транспорт (підводні човни), авіаційний транспорт (літаки, гелікоптери), космічний транспорт (ракети, космічні кораблі, штучні супутники Землі, космічні станції). Із усіх вище приведених видів транспорту нашим цілям та задачам найбільш відповідає авіаційний транспорт, бо по-перше він має максимально можливий ступінь свободи переміщення у трьох вимірах, з іншого боку має можливість переміщення із пункта А у пункт Б по прямій лінії на швидкості 500-1100 км/годину, що майже у 20 разів перевищує середню швидкість міського автотранспорту та могло би дозволити найбільш ефективно вирішувати транспортні задачі вище приведених екстрених муніципальних служб із мінімальними втратами часу. Але нажаль умови міських кварталів не дозволяють використовувати більшість сучасних видів авіаційного транспорту, бо для літаків та гелікоптерів необхідні злітно-посадочні смуги та гелікоптерні майданчики, котрими більшість українських міських кварталів не устатковані. У зв'язку із цим виникла реальна необхідність розробки принципово нового покоління авіаційного транспорту, котрий здатен літати за межами міста зі швидкістю реактивного літака (500-1100 км/годину), у межах міста літати із можливостями гелікоптера зі швидкістю 0-500 км/годину, але котрий на відміну від своїх попередників буде мати у десятки разів більш точне маневрування, здатність до абсолютно стабільного та нерухомого зависання на малих висотах, здатністю до максимально плавного вертикального зльоту та посадки безпосередньо з (на) доріг, тротуарів, та звичайних автомобільних паркувальних майданчиків, котрими устатковані сучасні міста України у достатній кількості, тобто транспорт, що буде мати усі переваги і гвинтокрила і літака. Найбільш близьким аналогом запропонованої корисної моделі є звичайний гвинтокрил [1-5], котрий має можливість горизонтального польоту на достатньо великій швидкості, але котрий не має функції плавного вертикального зльоту та посадки. Задачею запропонованої корисної моделі є розробка багатоцільового авіаційного транспорту із можливістю польоту на дозвукових швидкостях звичайного літака, а також можливістю плавного вертикального зльоту-посадки і високоточного маневрування. Поставлена задача вирішується тим, що до параболічного (куполоподібного) крила дискольота форми двовипуклої лінзи 1 по всій його площині, прикріплені двигуни вертикального зльоту (вертикальної тяги) 2 (у данному випадку їх вісім, але їх кількість, при необхідності, збільшують до будь-якого числа, кратного чотирьом), що направлені догори та до передньої частини (тобто поздовжня вісь двигунів вертикального зльоту 5 розташована під кутом 60 градусів до поздовжньої осі 4 дискольота (в залежності від потреб у максимальному прискорені дискольота даний кут змінюють з 10 градусів до 80 градусів), половина двигунів вертикального зльоту обертається за годинниковою стрілкою, друга половина двигунів обертається проти годинникової стрілки (для компенсації обертання за віссю рискання), як шасі використовуються чотири телескопічні опори 9, при цьому передні дві опори більш довгі, ніж задні дві опори, таким чином, що при стоянці на Землі поздовжня вісь дискольота знаходиться під певним (від 10 градусів - до 80 градусів) кутом до площини Землі 6 (частіше під кутом 30 градусів), а передня частина дискольота (ніс) знаходиться вище його задньої частини - хвоста (при необхідності кількість телескопічних опор збільшують в залежності від розмірів та ваги дискольота), якщо дисколіт не дуже сильно завантажений, і якщо необхідні великі прискорення (наприклад для швидкісного та високоманевреного дискольота) двигуни вертикального зльоту направлені максимально до передньої частини (під кутом 10-45 градусів до поздовжньої осі дискольота), а кут між поздовжньою віссю дискольота 4 та площиною Землі 6 при стоянці та зльоті дорівнює 80-45 градусів, якщо дисколіт сильно завантажений, і якщо не потрібні великі прискорення (наприклад, для вантажного транспортного дискольота) - двигуни вертикального зльоту навпаки, направлені максимально доверху (під кутом 45-80 градусів до поздовжньої осі літака), а кут між поздовжньою віссю дискольота та площиною Землі 8 при стоянці та зльоті дорівнює 45-10 градусів, в залежності від сфери застосування даного транспортного засобу, використовують поршневі, турбовентиляторні, турбореактивні, електричні та електроімпелерні двигуни, конструкція даного літального апарата дозволяє легко замінити більш старі модифікації двигунів на принципово нові (іонні, плазмові, гравітаційні, фотонні, квантові та інші). При цьому, якщо дисколіт іншої компоновки та іншого навантаження - кількість двигунів вертикального зльоту може бути не тільки 8, а і 4, 6, 12, 16, 20, 24, 28 … тобто будь-яка кількість кратна 2, таким чином, щоби однакова кількість двигунів однакової потужності була розташована по симетричних ділянках параболічного крила дискольота, та половина цих 2 UA 119667 U 5 10 15 20 25 30 35 40 45 50 55 60 двигунів обертались за годинниковою стрілкою, а друга їх половина оберталась проти годинникової стрілки. На Фіг. 1 схематично зображений запропонований пристрій у момент його стоянки та під час виконання 1 і 6 фази польоту (вигляд збоку), де: 1 - параболічне (куполоподібне) крило дискольота форми двовипуклої лінзи; 2 - двигуни вертикального зльоту (вертикальної тяги); 3 - напівсферична кабіна дискольота; 4 - поздовжня вісь дискольота; 5 - серединна поздовжня вісь двигунів вертикального зльоту (вертикальної тяги); 6 - площина поверхні Землі; 7 - кут між віссю двигунів вертикального зльоту (вертикальної тяги) та повздовжньою віссю дискольота; 8 - кут між поздовжньою віссю дискольота та площиною поверхні Землі; 9 - телескопічні опори (шасі) дискольота. На Фіг. 2 схематично зображений запропонований пристрій під час виконання 5 фази польоту, та під час вертикального зльоту та посадки при прибраних шасі (вигляд збоку), де: 1 - параболічне (куполоподібне) крило дискольота форми двовипуклої лінзи; 2 - двигуни вертикального зльоту (вертикальної тяги); 3 - напівсферична кабіна дискольота; 10 - вектор сили тяжіння; 11 - вектор сили тяги двигунів вертикального зльоту (вертикальної тяги). На Фіг. 3 схематично зображений запропонований пристрій під час виконання 2 і 4 фази польоту (вигляд збоку), де: 1 - параболічне (куполоподібне) крило дискольота форми двовипуклої лінзи; 2 - двигуни вертикального зльоту (вертикальної тяги); 3 - напівсферична кабіна дискольота; 4 - поздовжня вісь дискольота; 5 - серединна поздовжня вісь двигунів вертикального зльоту (вертикальної тяги); 6 - площина поверхні Землі; 7 - кут між віссю двигунів вертикального зльоту (вертикальної тяги) та поздовжньою віссю дискольота. На Фіг. 4 схематично зображений запропонований пристрій під час виконання 2 і 4 фази польоту (вигляд збоку), де: 1 - параболічне крило дискольота форми двовипуклої лінзи; 2 - двигуни вертикального зльоту (вертикальної тяги); 3 - напівсферична кабіна дискольота; 10 - вектор сили тяжіння; 11 - вектор сили тяги двигунів вертикального зльоту (вертикальної тяги); 12 - вектор підйомної сили параболічного крила дискольота; 13 - результуючий вектор сили, штовхаючий дисколіт у горизонтальному напрямі. На Фіг. 5 схематично зображений запропонований пристрій (вигляд зверху), де: 1 - параболічне (куполоподібне) крило дискольота форми двовипуклої лінзи; 2 - двигуни вертикального зльоту (вертикальної тяги); 3 - кабіна дискольота напівсферичної форми. Запропонований нами пристрій складається із дискольотного параболічного (куполоподібного) крила форми двовипуклої лінзи 1, двигунів вертикального зльоту (вертикальної тяги) 2 та телескопічних опор 4 (шасі) дискольота (Фіг. 1). До куполоподібного (параболічного) крила дискольота форми двовипуклої лінзи (Фіг. 1) по всій його площині, прикріплені двигуни вертикального зльоту (вертикальної тяги) 2 (у даному випадку їх вісім, але їх кількість може бути іншою - чотири та більше чотирьох). Дані двигуни направлені догори та до передньої частини (тобто поздовжня вісь двигунів вертикального зльоту 5 розташована під кутом 60 градусів до поздовжньої осі 4 дискольоту (може бути також від 10 градусів - до 80 градусів - в залежності від потреб у максимальному прискорені дискольота). Половина двигунів вертикального зльоту обертається за годинниковою стрілкою, друга половина обертається проти годинникової стрілки (для компенсації обертання за віссю рискання). Замість звичайних важких колісних шасі використовуються чотири телескопічні опори 9, при цьому передні дві опори більш довгі, ніж задні дві опори, таким чином, що при стоянці на Землі поздовжня вісь дискольота знаходиться під певним (від 10 градусів - до 80 градусів) кутом до площини Землі 6 (частіше під кутом 30 градусів), а передня частина дискольота (ніс) знаходиться вище його задньої частини - хвоста. При необхідності кількість телескопічних опор 3 UA 119667 U 5 10 15 20 25 30 35 40 45 50 55 60 може бути іншою - чотири і більше чотирьох - 6, 8 і т.д. в залежності від розмірів та ваги дискольота. Якщо дисколіт не дуже сильно завантажений, і якщо необхідні великі прискорення (наприклад для швидкісного та високоманевреного дискольота) двигуни вертикального зльоту направлені максимально до передньої частини (під кутом 10-45 градусів до поздовжньої осі дискольота), а кут між поздовжньою віссю дискольота 4 та площиною Землі 6 при стоянці та зльоті дорівнює 80-45 градусів. Якщо дисколіт сильно завантажений, і якщо не потрібні великі прискорення (наприклад для вантажного транспортного дискольота) - двигуни вертикального зльоту навпаки направлені максимально доверху (під кутом 45-80 градусів до поздовжньої осі літака), а кут між поздовжньою віссю дискольота та площиною Землі при стоянці та зльоті дорівнює 45-10 градусів. Якщо дисколіт іншої компоновки та іншого навантаження - кількість двигунів вертикального зльоту може бути не тільки 8, а і 4, 6, 12, 16, 20, 24, 28 … тобто будь-яка кількість кратна 2, таким чином, щоби однакова кількість двигунів однакової потужності була розташована по симетричних ділянках параболічного крила дискольота, та половина цих двигунів обертались за годинниковою стрілкою, а друга їх половина оберталась проти годинникової стрілки. Типи використовуваних двигунів також можуть бути різними (поршневі, турбовентиляторні турбореактивні та інші). Корисна модель здійснюється наступним чином. У момент стоянки дисколіт знаходиться у такому положенні, що його передня частина (ніс) вище його задньої частини (хвоста) і двигуни вертикального зльоту у такому положенні направлені доверху під кутом 90 градусів до площини Землі, вертикальний зліт (1 фаза польоту), дисколіт також робить у такому положенні, після чого проводиться прибирання шасі, далі для початку руху вперед (2 фаза польоту - див. Фіг. 3) - оберти задніх двигунів збільшуються і дисколіт нахиляється до передньої частини та донизу і стає у таке положення, що його поздовжня вісь 4 стає паралельною площині Землі 6, а вісь двигунів вертикального зльоту стає під кутом 60 градусів до площини Землі (Фіг. 3) (у інших варіантах компоновки та цільового призначення дискольотів вісь двигунів вертикального зльоту 5 може бути розташованою під кутом 80-10 градусів до площини Землі), після набору певної горизонтальної швидкості з'являється додаткова підйомна сила дискольотного параболічного крила і енергозатрати знижуються, після досягнення місця призначення джойстик керування тангажем переводиться у нейтральне положення (у режимі ручного керування), або автопілот припиняє рух вперед за тангажем у режимі автоматичного керування (3 фаза польоту - див. Фіг. 2), що приводить до зменшення швидкості обертання задніх двигунів вертикальної тяги, нахилу дискольота назад (у положення під кутом 30 градусів до площини Землі у даному дискольоті, або під кутом від 10 до 80 градусів у дискольотах іншої компоновки) і до повної зупинки руху дискольота у горизонтальному напрямі та його зависанні у повітрі (Фіг.2), далі відбувається поступове зниження обертів одночасно усіх двигунів вертикального зльоту (4 фаза польоту див. Фіг. 1) та випуск шасі, що приводить до плавної вертикальної посадки дискольота на необхідну ділянку у точці призначення (Фіг. 1). Запропоновані нові технічні рішення та безпілотна модель запропонованого нового авіаційного транспорту у масштабі 1:100 успішно апробовані у ході виконання автором магістерської роботи за спеціальністю "Інтелектуальна власність" за темою "Створення винаходів для розробки багатоцільового надзвукового авіаційного транспорту форми двовипуклої лінзи із можливістю плавного вертикального зльоту-посадки та високоточного маневрування для потреб невідкладної медицини" на базі "Національного Авіаційного Університету" у присутності комісії із керівників підрозділів НАУ, у ході льотних випробувань визнані такими, що відповідають поставленим цілям та задачам даної корисної моделі, відповідають основним вимогам сучасної експериментальної авіаційної техніки, можуть бути корисними у подальших нових перспективних наукових розробках у галузі авіації, галузі транспорту і зв'язку, та у галузі медицини (санітарної авіації, невідкладної медицини та організації і управління охороною здоров'я). Запропонований транспортний засіб має такі переваги: має можливість більш плавного вертикального зльоту та посадки безпосередньо з тротуарів, доріг та звичайних автомобільних паркувальних майданчиків, та не потребує спеціальних гелікоптерних площадок, що може бути використано у будь-якому виді транспорту (державного, муніципального, приватного - частково замінити легкові автомобілі на даний вид транспорту); має можливість абсолютно стабільного і нерухомого зависання та ювелірно точного маневрування на малих висотах, що дозволяє безпечно використовувати даний транспортний засіб в умовах звичайних міських кварталів та проводити його заправку зі звичайних автозаправочних станцій; 4 UA 119667 U 5 10 15 20 25 30 можливість використання даного виду транспорту для проведення агротехнічних робіт полив (зрошення) та обробка хімікатами рослин сільськогосподарського та технічного призначення на полях безпосередньо з повітря на більш малих висотах (від 50 см), ніж це можливо із звичайних літаків та гелікоптерів, що забезпечить більш точне та більш економічне використання води, хімікатів, реагентів і т.д. можливість швидкого польоту (до 1100 км/годину) за межами міста як на великих, так і на малих висотах. можливість повністю забезпечити потреби екстрених муніципальних служб як у швидкості, так і у маневреності. можливість доставляти хворих та постраждалих з будь-якого населеного пункту України у спеціалізовані лікувальні заклади м. Києва менш ніж за 40 хвилин, у межах однієї області менш ніж за 10 хвилин. можливість проведення будь-яких висотних рятувальних робіт (гасіння пожеж та евакуація постраждалих з верхніх поверхів хмарочосів та інших висотних будинків). можливість миттєвої зміни напрямку руху без додаткових розгортальних маневрів; відсутність необхідності у вкрай небезпечних поворотах двигунів під час польоту у конвертоплановому режимі для зміни нахилу фюзеляжу літака. можливість польоту на більш великих швидкостях у щільних шарах атмосфери (за рахунок розрідження повітря над (перед) літальним апаратом). зменшення енерговитрат при польоті за рахунок використання ефекту Коанди - створення підвищеного тиску (повітряної подушки) позаду та під дискольотом, та одномоментне зменшення повітряного тиску та аеродинамічного супротиву спереду та зверху дискольоту; можливість більш ефективного та більш безпечного польоту практично будь-якого літального апарата (класичного літака, гелікоптера, або дискольота) у режимі конвертоплану, тобто при неперпендикулярному розташуванні двигунів відносно горизонтальної площини літального апарату, що використовується у конвертоплановому режимі польоту; більш прогресивні та більш досконалі полікоптерні математичні алгоритми керування польотом літального апарату, що на відміну від класичних літакових та гелікоптерних алгоритмів керування не залежать від механічних складових літального апарату (елеронів, рулів висоти, рулів напрямку, або апарату перекосу гвинта гелікоптера), а напряму керують обертами двигунів і завдяки цьому є більш безпечними, більш відмовостійкими, менш залежними від механічного фактору, більш точними у керуванні, більш гнучкими, більш універсальними і придатними для керування практично любим літальним апаратом, як традиційної, так і нетрадиційної схеми. 35 40 45 50 55 Джерела інформації: 1. Вертолеты, расчет и проектирование. Том 2. Колебания и динамическая прочность Миль М.Л., Некрасов А.В., Браверман А.С. и др. М.: Машиностроение, 1967. С. 424. 2. Аэродинамика и динамика вертолета. Пейн П.Р. Гос. науч.тех. издат. ОБОРОНГИЗ, 1963 С. 491. 3. Практическая аэродинамика вертолета Ми-6. Яцунович М.С. Издательство: Транспорт, 1969 С. 208. 4. Базов Дмитрий Иванович. Аэродинамика вертолетов. Издательство: Транспорт, 1969 С. 150. 5. Джонсон У. Теория вертолета. Издательство: Мир, 1983 С. 337. 6. Вихревая теория гребного винта. Жуковский Н.Е. Издательство: ГИТТЛ, 1950. С. 245. 7. Вертолеты. Расчет интегральных аэродинамических характеристик и летно-технических данных. Вильдгрубе Л.С. Издательство: Машиностроение, 1977 С. 151. 8. Газотурбинные двигатели для вертолетов. Масленников М.М., Бехли Ю.Г., Шальман Ю.И. Издательство: Машиностроение, 1969. С. 202. 9. Динамика вертолета. Предельные режимы полета. Браверман А.С, Вайнтруб А.П. Издательство: М.: Машиностроение, 1988. С. 280. 10. Компрессорная система реактивного привода несущего винта вертолета. Бехли Ю.Г. Издательство: Оборонгиз, 1960 С. 101. 11. Воздушные винты. Александров В.Л. Издательство: Государственное издательство оборонной промышленности, 1951 С. 447. 12. Практическая аэродинамика вертолета Ка-26. К.Н. Лалетин. Издательство: Транспорт, 1974 С. 192. 5 UA 119667 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 Мультироторний конвертоплан дискольотного типу (дисколіт) із полікоптерним алгоритмом керування польотом, що має функцію вертикального зльоту та посадки, який відрізняється тим, що до параболічного (куполоподібного) крила дискольота форми двовипуклої лінзи 1 по всій його площині, прикріплені двигуни вертикального зльоту (вертикальної тяги) 2 (у даному випадку їх вісім, але їх кількість, при необхідності, збільшують до будь-якого числа, кратного чотирьом), що направлені догори та до передньої частини (тобто поздовжня вісь двигунів вертикального зльоту 5 розташована під кутом 60 градусів до поздовжньої осі 4 дискольота (в залежності від потреб у максимальному прискоренні дискольота даний кут змінюють з 10 градусів до 80 градусів), половина двигунів вертикального зльоту обертається за годинниковою стрілкою, друга половина обертається проти годинникової стрілки (для компенсації обертання за віссю рискання), як шасі використовуються чотири телескопічні опори 9, при цьому передні дві опори більш довгі, ніж задні дві опори, таким чином, що при стоянці на Землі поздовжня вісь дискольота знаходиться під певним (від 10 градусів - до 80 градусів) кутом до площини Землі 6 (частіше під кутом 30 градусів), а передня частина дискольота (ніс) знаходиться вище його задньої частини - хвоста (при необхідності кількість телескопічних опор збільшують в залежності від розмірів та ваги дискольота), якщо дисколіт не дуже сильно завантажений, і якщо необхідні великі прискорення (наприклад для швидкісного та високоманевреного дискольота) двигуни вертикального зльоту направлені максимально до передньої частини (під кутом 10-45 градусів до поздовжньої осі дискольота), а кут між поздовжньою віссю дискольота 4 та площиною Землі 6 при стоянці та зльоті дорівнює 80-45 градусів, якщо дисколіт сильно завантажений, і якщо не потрібні великі прискорення (наприклад для вантажного транспортного дискольота) - двигуни вертикального зльоту навпаки направлені максимально доверху (під кутом 45-80 градусів до поздовжньої осі літака), а кут між поздовжньою віссю дискольота та площиною Землі 8 при стоянці та зльоті дорівнює 45-10 градусів, в залежності від сфери застосування даного транспортного засобу, використовують поршневі, турбовентиляторні, турбореактивні, електричні та електроімпелерні двигуни, конструкція даного літального апарата дозволяє легко замінити більш старі модифікації двигунів на принципово нові (іонні, плазмові, гравітаційні, фотонні, квантові та ін.). 6 UA 119667 U 7 UA 119667 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 37/00, B64C 29/00
Мітки: о.о, алгоритмом, керування, полікоптерним, польотом, мультироторний, типу, конвертоплан, нахабою, дискольотного, дисколіт
Код посилання
<a href="https://ua.patents.su/10-119667-multirotornijj-konvertoplan-diskolotnogo-tipu-diskolit-iz-polikopternim-algoritmom-keruvannya-polotom-za-oo-nakhaboyu.html" target="_blank" rel="follow" title="База патентів України">Мультироторний конвертоплан дискольотного типу (дисколіт) із полікоптерним алгоритмом керування польотом за о.о. нахабою</a>
Мультироторний конвертоплан літакового типу із полікоптерним алгоритмом керування польотом за о.о. нахабою
Номер патенту: 119666
Опубліковано: 10.10.2017
Автор: Нахаба Олександр Олександрович
МПК: B64C 37/00, B64C 29/00
Мітки: типу, конвертоплан, алгоритмом, керування, полікоптерним, нахабою, мультироторний, о.о, польотом, літакового
Формула / Реферат:
Мультироторний конвертоплан літакового типу із полікоптерним алгоритмом керування польотом, що має можливість горизонтального польоту на достатньо великій швидкості, який відрізняється тим, що до фюзеляжу 1 класичного літака спереду та позаду його крил, прикріплені двигуни вертикального зльоту (вертикальної тяги) 2 (два спереду крил та два позаду крил), що направлені догори та до переду (тобто серединна поздовжня вісь двигунів 4 розташована...
Спосіб керування гравітацією і польотом магнітоплана у просторі
Номер патенту: 112919
Опубліковано: 10.01.2017
Автор: Гайдук Анатолій Миколайович
МПК: B64G 1/00, F01B 29/00
Мітки: магнітоплана, польотом, просторі, гравітацією, керування, спосіб
Формула / Реферат:
Спосіб керування гравітацією і польотом магнітоплана у просторі, що здійснюють за допомогою надпровідного магнітного двигуна Маг-8, який встановлюють у центрі його круглого корпусу, з кабіною екіпажу зверху і атомною силовою установкою у машинному відділенні внизу, яка виробляє і постачає електричну енергію у вказаний магнітний двигун, який своїми круглими надпровідними контурами, обертовими в протилежних напрямках, під впливом дії...
Спосіб літаководіння з запобіганням несанкціонованому доступу до керування польотом в екстремальних ситуаціях
Номер патенту: 62506
Опубліковано: 15.12.2003
Автори: Захарчевська Ірина Костянтинівна, Зайцев Юрій Володимирович, Бабак Віталій Павлович, Харченко Володимир Петрович, Конахович Георгій Филимонович
МПК: B64C 19/00
Мітки: екстремальних, польотом, несанкціонованому, сітуаціях, доступу, керування, спосіб, літаководіння, запобіганням
Формула / Реферат:
Спосіб літаководіння з запобіганням несанкціонованому доступу до керування польотом в екстремальних ситуаціях, який полягає в тому, що процес літаководіння здійснюють шляхом впливів пілота і автопілота, а також допускають безпосереднє втручання операторів управління повітряним рухом (УПР) шляхом формування керуючих сигналів корекції плану польоту й ешелонування, передачі їх на борт літака і введення в бортову обчислювальну систему, причому в...
Спосіб керування польотом коректованого літального апарата
Номер патенту: 80439
Опубліковано: 25.09.2007
Автори: Яковенко Петро Олексійович, Ляденко Андрій Пилипович, Целінко Олександр Михайлович, Канєвський Валерій Олександрович
МПК: G08B 25/00, A62B 37/00
Мітки: керування, спосіб, апарата, польотом, літального, коректованого
Формула / Реферат:
1. Спосіб керування польотом коректованого літального апарата, який включає запуск безпілотного літального апарата для виходу в район доставки, наведення безпілотного літального апарата на місце доставки, пуск після запуску безпілотного літального апарата іншого безпілотного літального апарата-носія корисного вантажу в район доставки керування польотом безпілотного літального апарата за допомогою радіокомандної лінії керування за допомогою...
Спосіб літаководіння з запобіганням несанкціонованого доступу до керування польотом і пристрій для його здійснення
Номер патенту: 53576
Опубліковано: 15.01.2003
Автори: Тунік Анатолій Азарійович, Бабак Віталій Павлович, Яновський Фелікс Йосипович, Конахович Георгій Филимонович, Харченко Володимир Петрович
МПК: B64C 19/00
Мітки: здійснення, доступу, несанкціонованого, спосіб, польотом, керування, пристрій, запобіганням, літаководіння
Формула / Реферат:
1. Спосіб літаководіння з запобіганням несанкціонованого доступу до керування польотом, який полягає в тому, що процес літаководіння здійснюють шляхом впливів пілота й автопілоту, а також допускають безпосереднє втручання наземних диспетчерів керування повітряним рухом (КПР) шляхом формування керуючих сигналів корекції плану польоту й ешелонування, передаючі їх на борт літака і введення в обчислювальну систему літаководіння (ОСЛ) (або FMS -...
Попередній патент: Мультироторний конвертоплан літакового типу із полікоптерним алгоритмом керування польотом за о.о. нахабою
Випадковий патент: Спосіб відновлення лап культиваторів