Спосіб літаководіння з запобіганням несанкціонованому доступу до керування польотом в екстремальних ситуаціях
Номер патенту: 62506
Опубліковано: 15.12.2003
Автори: Харченко Володимир Петрович, Захарчевська Ірина Костянтинівна, Бабак Віталій Павлович, Конахович Георгій Филимонович, Зайцев Юрій Володимирович
Формула / Реферат
Спосіб літаководіння з запобіганням несанкціонованому доступу до керування польотом в екстремальних ситуаціях, який полягає в тому, що процес літаководіння здійснюють шляхом впливів пілота і автопілота, а також допускають безпосереднє втручання операторів управління повітряним рухом (УПР) шляхом формування керуючих сигналів корекції плану польоту й ешелонування, передачі їх на борт літака і введення в бортову обчислювальну систему, причому в ручному режимі літаководіння впливають на аеродинамічні рулі літака і тягу двигунів для виконання заданого плану польоту на основі наявної навігаційної інформації і команд оператора УПР, а в автоматичному режимі літаководіння формують керуючі впливи на аеродинамічні рулі літака і тягу двигунів за допомогою бортової обчислювальної системи, необхідні значення параметрів польоту, що підлягають стабілізації або програмній зміні, задають автоматично за допомогою бортової обчислювальної системи або вручну з пультів керування польотом, крім того, в автоматичному режимі допускають введення керуючих сигналів із землі безпосередньо в бортову обчислювальну систему через систему авіаційного електрозв'язку, минаючи пілота, при виникненні на борту позаштатної екстремальної ситуації формують спеціальні керуючі кодовані сигнали оператора УПР, передають їх у режимі S на борт літака, здійснюють відповідно з цими керуючими сигналами блокування всіх бортових органів ручного керування і передають керування літаком оператору УПР, який відрізняється тим, що додатково виконують автоматичну ідентифікацію пілота шляхом аналізу мовного сигналу по каналу радіообміну "земля-борт", порівнюють результати аналізу з попередньо запам‘ятованими еталонами мови пілотів, формують за результатами порівняння сигналу оповіщення для оператора УПР.
Текст
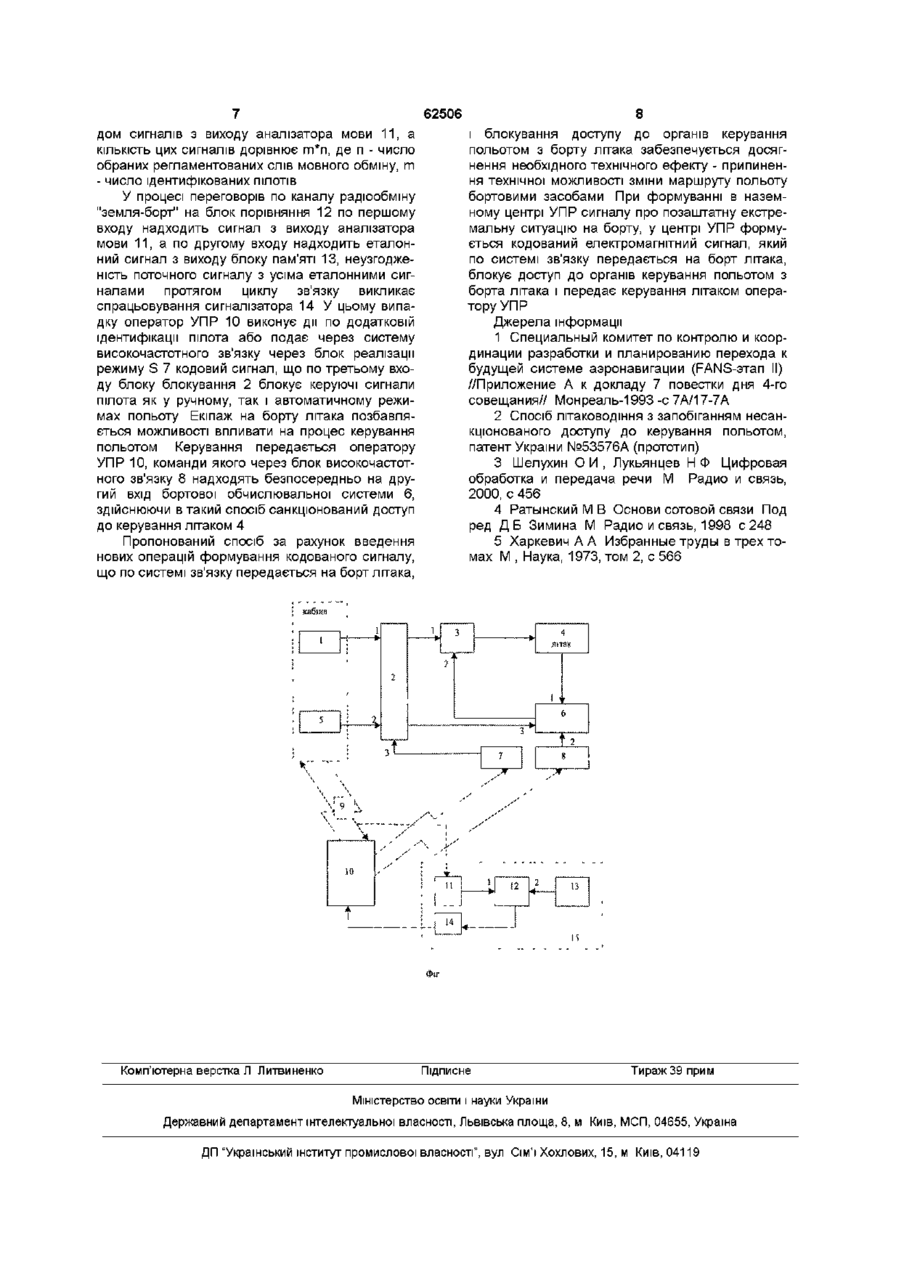
Спосіб літаководіння з запобіганням несанкціонованому доступу до керування польотом в екстремальних ситуаціях, який полягає в тому, що процес літаководіння здійснюють шляхом впливів пілота і автопілота, а також допускають безпосереднє втручання операторів управління повітряним рухом (УПР) шляхом формування керуючих сигналів корекції плану польоту й ешелонування, передачі їх на борт літака і введення в бортову обчислювальну систему, причому в ручному режимі літаководіння впливають на аеродинамічні рулі літака і тягу двигунів для виконання заданого плану польоту на основі наявної навігаційної інформації і команд оператора УПР, а в автоматичному режимі літаководіння формують керуючі впливи на аеродинамічні рулі літака і тягу двигунів за допомогою бортової обчислювальної системи, необхідні значення параметрів польоту, що підлягають стабілізації або програмній ЗМІНІ, задають автоматично за допомогою бортової обчислювальної системи або вручну з пультів керування польотом, крім того, в автоматичному режимі допускають введення керуючих сигналів із землі безпосередньо в бортову обчислювальну систему через систему авіаційного електрозв'язку, минаючи пілота, при виникненні на борту позаштатної екстремальної ситуації формують спеціальні керуючі кодовані сигнали оператора УПР, передають їх у режимі S на борт літака, здійснюють ВІДПОВІДНО з цими керуючими сигналами блокування всіх бортових органів ручного керування і передають керування літаком оператору УПР, який відрізняється тим, що додатково виконують автоматичну ідентифікацію пілота шляхом аналізу мовного сигналу по каналу радіообміну "земля-борт", порівнюють результати аналізу з попередньо запам'ятованими еталонами мови ПІЛОТІВ, формують за результатами порівняння сигналу оповіщення для оператора УПР (О о ю Винахід відноситься до галузі систем автоматичного літаководіння для повітряних суден (ПС) цивільної авіації і може бути використаний для запобігання несанкціонованого доступу до бортових засобів керування польотом при виникненні на борту позаштатних екстремальних ситуацій, у тому числі захоплення ПС терористами Відомий спосіб літаководіння [1], обраний як аналог полягає в наступному, крім впливів пілота й автопілоту допускається також і безпосереднє втручання операторів управління повітряним рухом (УПР) у процес літаководіння за допомогою введення керуючих сигналів корекції плану польоту й ешелонування в бортову обчислювальну систему При цьому зберігаються основні принципи літаководіння, тому що пілот має можливість впливати на керування польотом при будь-якому режимі роботи системи Цей спосіб літаководіння здійснюється в ручному або в автоматичному режимі шляхом виконання наступних основних операцій 1) у ручному режимі літаководіння пілот впливає на аеродинамічні рулі літака і тягу двигунів для виконання заданого плану польоту на основі наявної навігаційної інформації та команд оператора УПР, 2) в автоматичному режимі літаководіння керуючі впливи на аеродинамічні рулі літака і тягу двигунів формує бортова обчислювальна система Задані значення параметрів польоту, що підлягають стабілізації чи програмній ЗМІНІ, задає або бортова обчислювальна система або пілот вручну з пультів керування польотом Крім того, в автоматичному режимі можливе введення керуючих сигналів, сформованих оператором УПР, безпосередньо в бортову обчислювальну систе (О 62506 му через систему авіаційного електрозвязку повз пілота Цей спосіб є дуже ефективним при нормальній штатній ситуації на борту літака У режимі ручного керування пілот безпосередньо впливає на режим польоту і одержує коригувальні команди оператора УПР по ЛІНІЯХ зв'язку в разі потреби корекції положення літака Ці команди він також відпрацьовує вручну В автоматичному режимі пілот може вводити команди корекції з пультів керування польотом в бортову обчислювальну систему Крім цього, команди корекції може вводити й оператор УПР через канали автоматичного зв'язку, однак пілот у всіх випадках може взяти керування на себе Це і є основною вадою цього способу, оскільки в практиці літаководіння цивільної авіації з'явилися випадки виникнення позаштатної екстремальної ситуації на борту літака, що вимагає запобігти несанкціонованому доступу до органів керування польотом на борту Під несанкціонованим доступом при позаштатній екстремальній ситуації розуміють будь-які змушені дії екіпажу під тиском терористів або дії самих терористів, спрямовані на зміну маршруту літака з метою здійснення терористичних актів стосовно наземних об'єктів Недолік полягає в тому, що при виникненні позаштатної екстремальної ситуації аналог дає пріоритет пілоту при керуванні літаком у всіх режимах Це робить уразливими стратегічно важливі наземні об'єкти, тому що по них може бути завдано удар захопленим терористами літаком при несанкціонованому доступі до його органів керування, що і є основною причиною, яка перешкоджає одержанню даним способом необхідного технічного результату - недопущення технічної можливості зміни маршруту польоту з борту літака при позаштатній екстремальній ситуації і запобігання можливого терористичного акту Відомий спосіб літаководіння з запобіганням несанкціонованого доступу до керування польотом [2], обраний як прототип, полягає в тому, що процес літаководіння здійснюють шляхом впливів пілота й автопілоту, а також допускають безпосереднє втручання оператора УПР шляхом формування керуючих сигналів корекції плану польоту й ешелонування, передачі їх на борт літака і введення в бортову обчислювальну систему, причому в ручному режимі літаководіння впливають на аеродинамічні рулі літака і тягу двигунів для виконання заданого плану польоту на основі наявної навігаційної інформації і команд оператора УПР, а в автоматичному режимі літаководіння формують керуючі впливи на аеродинамічні рулі літака та тягу двигунів за допомогою бортової обчислювальної системи Необхідні значення параметрів польоту, що підлягають стабілізації або програмній ЗМІНІ, задають автоматично за допомогою бортової обчислювальної системи, або вручну з пультів керування польотом, крім того, в автоматичному режимі допускають введення керуючих сигналів із землі безпосередньо в бортову обчислювальну систему через систему авіаційного електрозв'язку, минаючи пілота При виникненні на борту позаштатної екстремальної ситуації формують спеціальні керуючі кодовані сигнали наземного оператора УПР, передають їх у режимі S на борт літака і здійснюють ВІДПОВІДНО з цими керуючими сигналами блокування всіх бортових органів ручного керування виконавчими механізмами керування польотом і передають керування літаком наземному оператору УПР Недоліком даного способу є неможливість визначення позаштатної екстремальної ситуації на борті ПС наземним оператором УПР у випадку - швидкого захвату терористами ПС у польоті, утому числі швидкого захвату кабіни екіпажу, - неможливості передачі екіпажем на землю ВІДПОВІДНОГО попереджувального сигналу будьякого роду, - захвату органів управління ПС терористами, які володіють професійною термінологією мовної взаємодії з оператором УПР Таким чином оператор УПР не завжди може відреагувати на позаштатну ситуацію і не може сформувати спеціальні керуючі сигнали для блокування бортових органів ручного керування ПС, що може привести до катастрофічного результату польоту В основу винаходу поставлена задача удосконалити спосіб літаководіння з запобіганням несанкціонованого доступу до керування польотом в екстремальних ситуаціях, а саме розширити можливості щодо запобігання несанкціонованого доступу до керування літаком, а особливо для миттєвої реєстрації нештатної ситуації в кабіні літака, а також запобігти захват органів управління ПС терористами, які володіють професійною термінологією мовної взаємодії з оператором УПР, шляхом ідентифікації мови радіообміну "земля -борт" і формування ВІДПОВІДНОГО попереджувального сигналу Поставлена задача удосконалити винахід вирішується тим, що в способі літаководіння з запобіганням несанкціонованого доступу до керування польотом, який полягає в тому, що процес літаководіння здійснюють шляхом впливів пілота й автопілоту, а також допускають безпосереднє втручання операторів керування повітряним рухом (УПР) шляхом формування керуючих сигналів корекції плану польоту й ешелонування, передачі їх на борт літака і введення в бортову обчислювальну систему, причому в ручному режимі літаководіння впливають на аеродинамічні рулі літака і тягу двигунів для виконання заданого плану польоту на основі наявної навігаційної інформації і команд оператора УПР, а в автоматичному режимі літаководіння формують керуючі впливи на аеродинамічні рулі літака і тягу двигунів за допомогою бортової обчислювальної системи, необхідні значення параметрів польоту, що підлягають стабілізації або програмній ЗМІНІ, задають автоматично за допомогою бортової обчислювальної системи, або вручну з пультів керування польотом , крім того, в автоматичному режимі допускають введення керуючих сигналів із землі, безпосередньо в бортову обчислювальну систему через систему авіаційного електрозв'язку, минаючи пілота, при виникненні на борту позаштатної екстремальної ситуації формують спеціальні керуючі кодовані сигнали оператора УПР, 62506 передають їх у режимах S на борт літака, здійснюють ВІДПОВІДНО з цими керуючими сигналами блокування всіх бортових органів ручного керування і передають керування літаком оператору УПР, згідно з винаходом, додатково виконують автоматичну ідентифікацію пілота шляхом аналізу мовного сигналу по каналу радіообміну "земля-борт", порівнюють результати аналізу з попередньо запам'ятованими еталонами мови ПІЛОТІВ, формують за результатами порівняння сигналу оповіщення для оператора УПР На фіг 1 представлена структурна-схема, яка реалізує пропонований спосіб і містить 1- органи керування літаком у ручному режимі польоту (колонка, штурвал, педалі, рукоятка керування двигунами), 2 - блок блокування, 3 - блок керування аеродинамічними рулями літака і тягою двигунів, 4 - літак, 5- пульт керування літаком в автоматичному режимі польоту, 6 - бортова обчислювальна система, 7 - блок реалізації режиму S, 8 - блок високочастотного зв'язку, 9 - канал радіообміну "земля-борт", 10 - оператор УПР, 11 - аналізатор мови радіообміну "земля-борт", 12 - блок порівняння, 13 - блок пам'яті радюпереговорів, 14 сигналізатор, 15 - наземна обчислювальна система Аналізатор мови радіообміну "земля-борт" 11, блок порівняння 12, блок пам'яті 13, сигналізатор 14 утворюють наземну обчислювальну систему 15 Органи керування літаком у ручному режимі польоту (колонка, штурвал, педалі, рукоятка керування двигунами) 1 з'єднані через перший вхід блоку блокування 2 з першим входом блоку керування аеродинамічними рулями літака і тягою двигунів 3 літака 4 Пульт керування літаком в автоматичному режимі польоту 5 з'єднаний через другий вхід блоку блокування 2 із третім входом бортової обчислювальної системи 6, вихід якої з'єднаний із другим входом блоку керування аеродинамічними рулями літака і тягою двигунів З літака 4 Перший вхід бортової обчислювальної системи 6 з'єднаний з виходом літака 4 (параметри, що характеризують стан літака 4) Блок реалізації режиму S 7 з'єднаний з третім входом блоку блокування 2, блок високочастотного зв'язку 8 з'єднаний із другим входом бортової обчислювальної системи 6 Оператор УПР 10 взаємодіє з екіпажем літака по каналу радіообміну "земляборт" 9 і паралельно з'єднаний із входом аналізатора мови радіообміну екіпаж-оператор УПР 11, вихід якого приєднаний до першого входу блоку порівняння 12, другий вхід якого з'єднаний з виходом блоку пам'яті радюпереговорів 13, а вихід блоку порівняння 12 з'єднаний із входом сигналізатора 14, а вихід - з оператором УПР 10 Заявлений спосіб реалізують на структурній схемі таким чином У режимі ручного (штурвального) керування По командах від органів керування літаком 1 по першому входу блоку керування аеродинамічними рулями і тягою двигунів 3 керують станом літака 4 у повітряному просторі Зворотний зв'язок по керуванню з виходу літака 4 через перший вхід бортової обчислювальної системи 6, з метою поліпшення динамічних характеристик, замика ється на другий вхід блоку керування аеродинамічними рулями і тягою двигунів 3 Оператор УПР 10 має можливість посилати керуючі команди по каналу радіообміну "земля-борт" 9 і коректувати дії екіпажу, при цьому дії пілота мають пріоритет У режимі автоматичного керування По командах від пульту керування літаком в автоматичному режимі польоту 5 через третій вхід бортової обчислювальної системи 6, або безпосередньо по заздалегідь заданій програмі через другий вхід блоку керування аеродинамічними рулями і тягою двигунів 3 керують станом літака 4 у повітряному просторі У штатному режимі блок блокування 2 по першому і другому входах відкритий і керуючі сигнали від органів керування 1,5, що знаходяться в розпорядженні пілота, визначають стан літака 4 Оператор УПР 10 має можливість посилати керуючі команди через блок високочастотного зв'язку 8 у бортову обчислювальну систему 6 по другому входу, при цьому дії пілота мають пріоритет При позаштатній екстремальній ситуації на борту літака можливі два варіанти Перший - екіпаж по каналах зв'язку передає повідомлення про захоплення літака Оператор УПР через систему високочастотного зв'язку або через блок реалізації режиму S 7 передає кодовий сигнал, що по третьому входу блоку блокування 2 блокує керуючі сигнали пілота як у ручному, так і автоматичному режимах польоту Екіпаж на борту літака позбавляється можливості впливати на процес керування польотом Керування передається оператору УПР 10, команди якого через блок високочастотного зв'язку 8 надходять безпосередньо на другий вхід бортової обчислювальної системи 6, здійснюючи в такий спосіб санкціонований доступ до керування літаком 4 Другий - екіпаж по каналах зв'язку не встиг передати повідомлення про захоплення літака Вихідний МОВНИЙ сигнал з каналу радіообміну "земля-борт" 9 поступає оператору УПР 10 і паралельно надходить на аналізатор мови 11 та обробляється ним з метою виділення індивідуальних ознак мови і голосу пілота Тип аналізатора мови 11 визначається видом сигналів у каналі радіообміну "земля-борт" У випадку аналогових сигналів аналізатор мови 11 може бути реалізований або у вигляді блоку спектрального аналізу [5, с 153] або у вигляді обчислювача, що виконує задане перетворення вхідного сигналу У випадку цифрових сигналів аналізатор мови 11 містить вхідний декодер ВІДПОВІДНОГО стандарту [3, с 43], що відновлює мову по її цифрових параметрах [4, с 87] Автоматична ідентифікація пілота в пропонованому способі заснована на регламентованості фраз мовного обміну між екіпажем і оператором УПР Тому мовні еталони для попереднього запису в блок пам'яті 13 відбираються з обов'язкових слів пілота в кожній конкретній ситуації польоту Такі слова записуються кожним пілотом з його індивідуальними особливостями мови При цьому вид представлення еталонних сигналів у блоці пам'яті 13 повинен бути погоджений з ви 62506 дом сигналів з виходу аналізатора мови 11, а КІЛЬКІСТЬ цих сигналів дорівнює m*n, де п - число обраних регламентованих слів мовного обміну, m - число ідентифікованих ПІЛОТІВ У процесі переговорів по каналу радіообміну "земля-борт" на блок порівняння 12 по першому входу надходить сигнал з виходу аналізатора мови 11, а по другому входу надходить еталонний сигнал з виходу блоку пам'яті 13, неузгодженість поточного сигналу з усіма еталонними сигналами протягом циклу зв'язку викликає спрацьовування сигналізатора 14 У цьому випадку оператор УПР 10 виконує дії по додатковій ідентифікації пілота або подає через систему високочастотного зв'язку через блок реалізації режиму S 7 кодовий сигнал, що по третьому входу блоку блокування 2 блокує керуючі сигнали пілота як у ручному, так і автоматичному режимах польоту Екіпаж на борту літака позбавляється можливості впливати на процес керування польотом Керування передається оператору УПР 10, команди якого через блок високочастотного зв'язку 8 надходять безпосередньо на другий вхід бортової обчислювальної системи 6, здійснюючи в такий спосіб санкціонований доступ до керування літаком 4 8 і блокування доступу до органів керування польотом з борту літака забезпечується досягнення необхідного технічного ефекту - припинення технічної можливості зміни маршруту польоту бортовими засобами При формуванні в наземному центрі УПР сигналу про позаштатну екстремальну ситуацію на борту, у центрі УПР формується кодований електромагнітний сигнал, який по системі зв'язку передається на борт літака, блокує доступ до органів керування польотом з борта літака і передає керування літаком оператору УПР Джерела інформації 1 Специальный комитет по контролю и координации разработки и планированию перехода к будущей системе аэронавигации (FANS-этап II) //Приложение А к докладу 7 повестки дня 4-го совещания// Монреаль-1993 -с 7А/17-7А 2 Спосіб літаководіння з запобіганням несанкціонованого доступу до керування польотом, патент України №53576А (прототип) 3 Шелухин О И , Лукьянцев Н Ф Цифровая обработка и передача речи М Радио и связь, 2000, с 456 4 Ратынский М В Основи сотовой связи Под ред Д Б Зимина М Радио и связь, 1998 с 248 5 Харкевич А А Избранные труды в трех томах М , Наука, 1973, том 2, с 566 Пропонований спосіб за рахунок введення нових операцій формування кодованого сигналу, що по системі зв'язку передається на борт літака, Фіг Комп'ютерна верстка Л Литвиненко Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for air navigation with prevention of non-authorized access to operational control in extreme cases
Автори англійськоюBabak Vitalii Pavlovych, Kharchenko Volodymyr Petrovych, Konakhovych Heorhii Fylymonovych, Zakharchevska Iryna Kostiantynivna
Назва патенту російськоюСпособ самолетовождения с предотвращением несанкционированного доступа к управлению полетом в экстремальных ситуациях
Автори російськоюБабак Виталий Павлович, Харченко Владимир Петрович, Конахович Георгий Филимонович, Захарчевская Ирина Константиновна
МПК / Мітки
МПК: B64C 19/00
Мітки: сітуаціях, керування, екстремальних, польотом, несанкціонованому, спосіб, літаководіння, доступу, запобіганням
Код посилання
<a href="https://ua.patents.su/4-62506-sposib-litakovodinnya-z-zapobigannyam-nesankcionovanomu-dostupu-do-keruvannya-polotom-v-ekstremalnikh-situaciyakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб літаководіння з запобіганням несанкціонованому доступу до керування польотом в екстремальних ситуаціях</a>
Спосіб літаководіння з запобіганням несанкціонованого доступу до керування польотом і пристрій для його здійснення
Номер патенту: 53576
Опубліковано: 15.01.2003
Автори: Конахович Георгій Филимонович, Бабак Віталій Павлович, Тунік Анатолій Азарійович, Яновський Фелікс Йосипович, Харченко Володимир Петрович
МПК: B64C 19/00
Мітки: керування, літаководіння, несанкціонованого, здійснення, пристрій, доступу, спосіб, запобіганням, польотом
Формула / Реферат:
1. Спосіб літаководіння з запобіганням несанкціонованого доступу до керування польотом, який полягає в тому, що процес літаководіння здійснюють шляхом впливів пілота й автопілоту, а також допускають безпосереднє втручання наземних диспетчерів керування повітряним рухом (КПР) шляхом формування керуючих сигналів корекції плану польоту й ешелонування, передаючі їх на борт літака і введення в обчислювальну систему літаководіння (ОСЛ) (або FMS -...
Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Номер патенту: 57747
Опубліковано: 15.07.2003
Автор: Сеінтс Кіт В.
МПК: H04B 7/00
Мітки: режимом, каналів, доступу, паралельного, зв'язку, керування, спосіб, потужністю, замкнений, замкнена, кодовим, варіанти, пдкр, розподілом, системі, система, систем
Формула / Реферат:
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:вимірюванні значення енергії у смузі частот,вимірюванні енергії пілот-каналу,перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.відніманні зазначеного значення...
Установка поверхонь керування літаком з крилом великого звуження
Номер патенту: 49190
Опубліковано: 16.09.2002
Автор: Моргун Олександр Павлович
МПК: B64C 9/00
Мітки: літаком, установка, керування, звуження, поверхонь, крилом, великого
Формула / Реферат:
Установка поверхонь керування літаком з крилом великого звуження, утворена закрилками на крилі, хвостовим стабілізатором, установленим між кілями на хвостових балках, з рулями напрямку на кілях, яка відрізняється тим, що крило літака виконано зі збільшеними стрілоподібністю і кореневою хордою, хвостові балки включені до силового набору крила; хвостовий стабілізатор несиметричного перевернутого профілю установлений над задньою кромкою крила з...
Система техніки безпеки польоту літаків

Номер патенту: 57939
Опубліковано: 15.07.2003
Автор: Філіпчук Степан Павлович
МПК: G08B 21/00
Мітки: літаків, безпеки, польоту, техніки, система
Формула / Реферат:
1. Система техніки безпеки польоту літаків, що містить салон пасажирів, кабіну пілота, тамбур пілота, яка відрізняється тим, що у верхній частині тамбура і кабіні пілота розташований лазерний пристрій.2. Система за п. 1, яка відрізняється тим, що на стіні з боку кабіни пілота встановлений пристрій, електрично зв’язаний з лазерним пристроєм.3. Система за п. 1, яка відрізняється тим, що на стіні, яка межує із салоном пасажирів,...
Спосіб оперативного управління системами передачі сигналів тривоги при надзвичайних ситуаціях
Номер патенту: 50693
Опубліковано: 15.10.2002
Автори: Ільмінський Олександр Миколайович, Зінков Євген Григорович, Кожушко Володимир Петрович
МПК: G08B 27/00, G08B 1/00
Мітки: оперативного, системами, сигналів, тривоги, сітуаціях, передачі, спосіб, надзвичайних, управління
Формула / Реферат:
Спосіб оперативного управління системами передачі сигналів тривоги при надзвичайних ситуаціях, що включають територіально розгалужену мережу сигнальних терміналів з кодуванням і модуляцією управляючих пакетів радіосигналів, який відрізняється тим, що пакети управляючих радіосигналів постачають даними, що містять код термінала і визначення тимчасового циклу сигналу тривоги.
Попередній патент: Спосіб протягання троса під льодом
Наступний патент: Спосіб виробництва азотної кислоти (варіанти) та установка для його здійснення (варіанти)
Випадковий патент: Спосіб одержання рідкої форми лікарського препарату