Трикоординатний перетворювач вібропереміщень
Номер патенту: 349
Опубліковано: 30.04.1993
Автори: Єгорова Віра Анатоліївна, Квашин Михайло Федорович, Крічковський Володимир Олексійович, Цибулько Вадим Йосипович, Метельов Леонід Дмитрович, Росліков Олександр Фірсович
Формула / Реферат
1. Трехкоординатный преобразователь виброперемещений, содержащий корпус, размещенные в нем инерционную массу с упругой системой подвеса, демпфер и три взаимодействующие пары, каждая из которых включает в себя: чувствительный и опорный элементы и установлена вдоль одной из взаимно перпендикулярных осей, опорные элементы связаны с инерционной массой, рабочие поверхности чувствительного и опорного элементов каждой пары параллельны друг другу и перпендикулярны соответствующей оси, образуя рабочий зазор, отличающийся тем, что, с целью повышения достоверности контроля, по крайней мере один из инерционных элементов снабжен узлом компенсации продольной составляющей его веса и тремя цилиндрическими стаканами, закрепленными в корпусе вдоль трех взаимно перпендикулярных осей, каждый чувствительный элемент связан с корпусом, инерционная масса выполнена в виде трех независимых инерционных элементов, упругая система подвеса в виде трех независимых комплектов упругих элементов, обладающих меньшей жесткостью в одном направлении, каждый инерционный элемент установлен соосно в соответствующем цилиндрическом стакане на соответствующем комплекте упругих элементов в направлении их меньшей жесткости, совпадающем с осью инерционного элемента, с возможностью перемещения вдоль этой оси, каждый опорный элемент соосно закреплен на соответствующем инерционном элементе, демпфер представляет собой жидкость, а каждый узел компенсации продольной составляющей веса инерционного элемента связан с соответствующим инерционным элементом и стаканом.
2. Преобразователь по п. 1, отличающийся тем, что каждый чувствительный элемент соосно закреплен на торце соответствующего цилиндрического стакана.
3. Преобразователь по п. 1, отличающийся тем, что, с целью расширения эксплуатационных возможностей, каждый опорный элемент выполнен в виде перфорированного диска и закреплен на торце соответствующего инерционного элемента.
4. Преобразователь по п. 1, отличающийся тем, что, узел компенсации продольной составляющей веса инерционного элемента выполнен, в виде витой пружины, установленной снаружи соответствующего цилиндрического стакана, один конец витой пружины закреплен жестко на стакане, второй шарнирно закреплен на оси инерционного элемента.
5. Преобразователь по п. 1, отличающийся, тем, что, с целью повышения точности преобразования, центры тяжести инерционных элементов установлены на одной оси, расположенной вдоль оси угловых колебаний.
6. Преобразователь по пп.1-3, отличающийся тем, что, с целью улучшения эксплуатационных характеристик 9 каждый цилиндрический стакан выполнен в виде коаксиально расположенных и установленных с возможностью перемещения вдоль оси, цилиндра и втулки, а на торце последней закреплен чувствительный элемент.
Текст
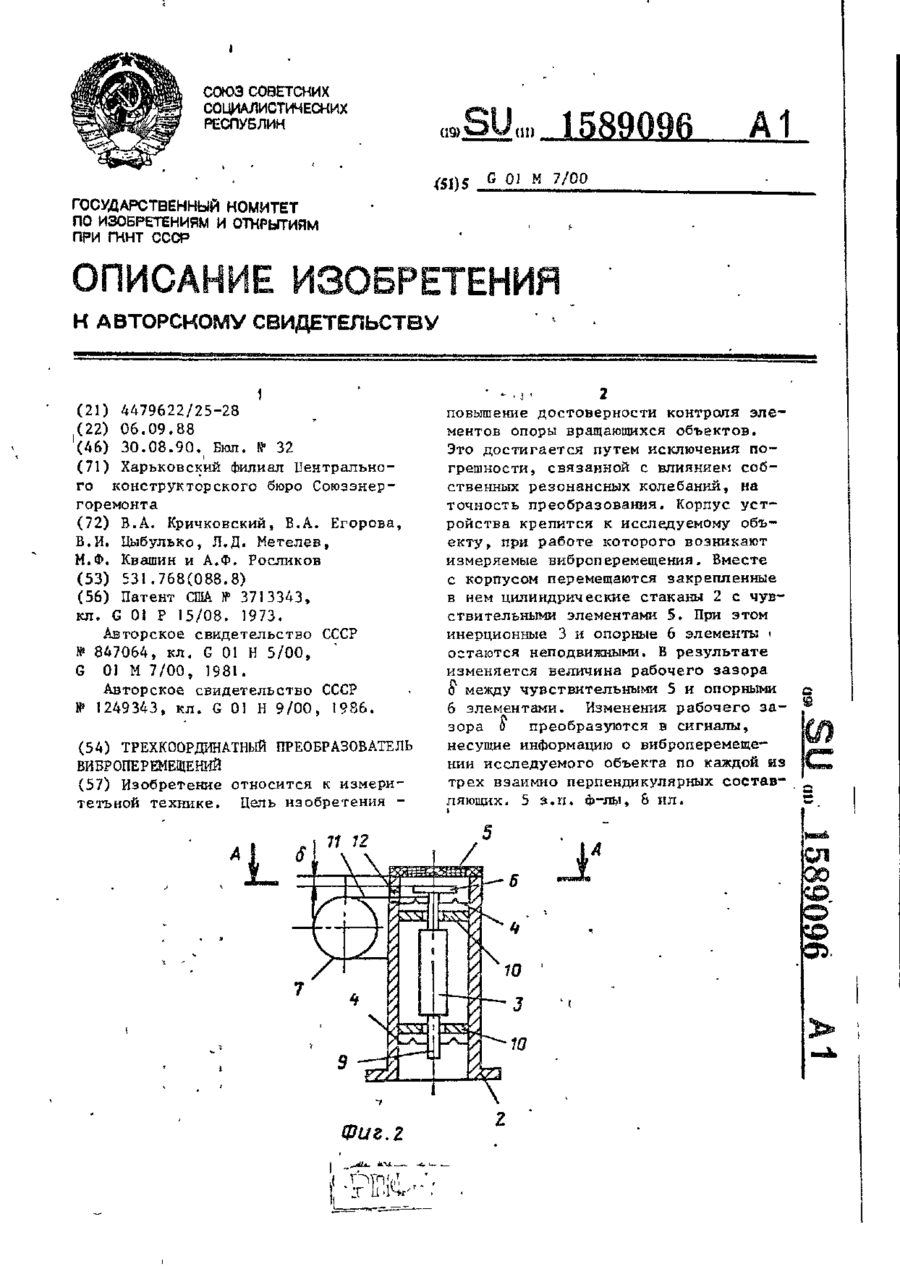
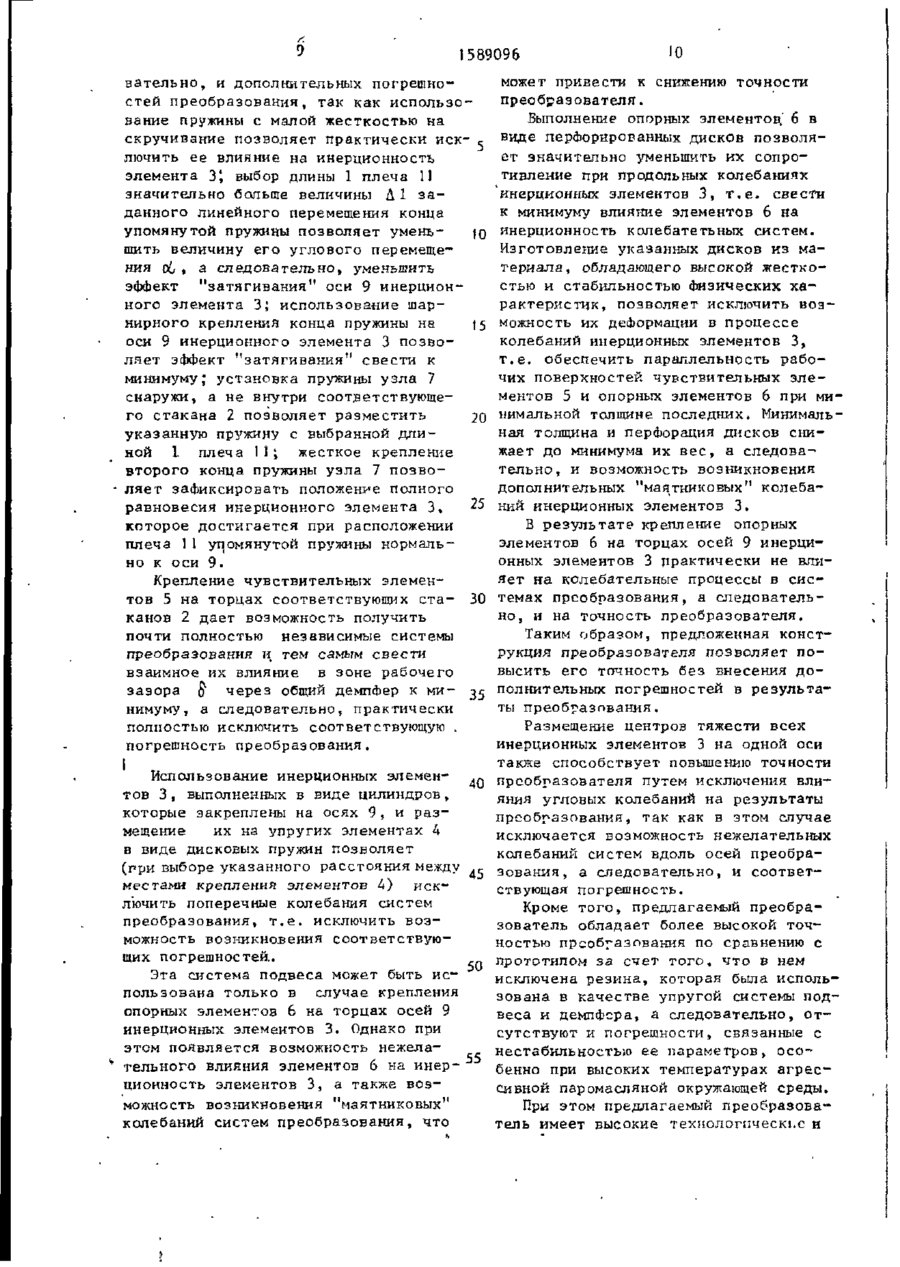
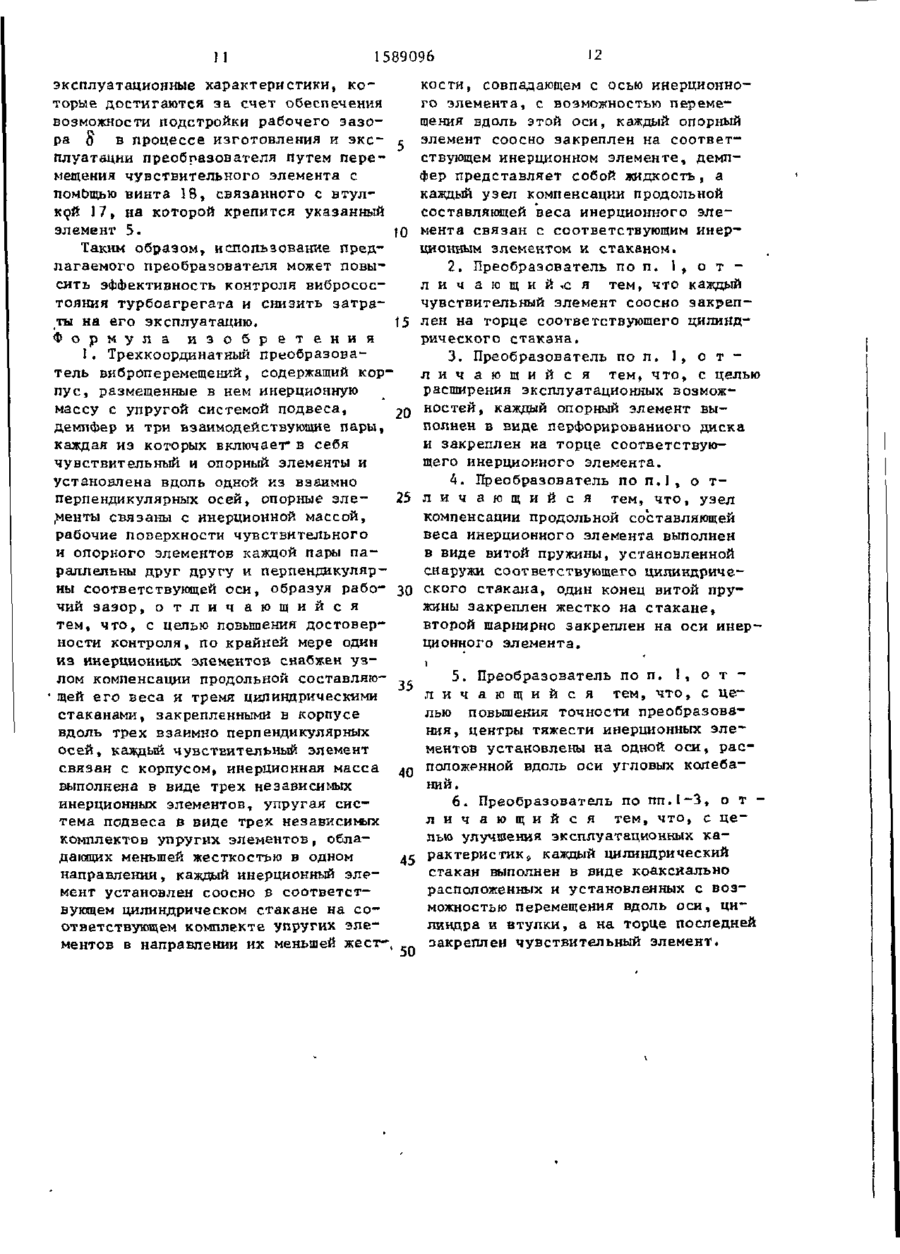
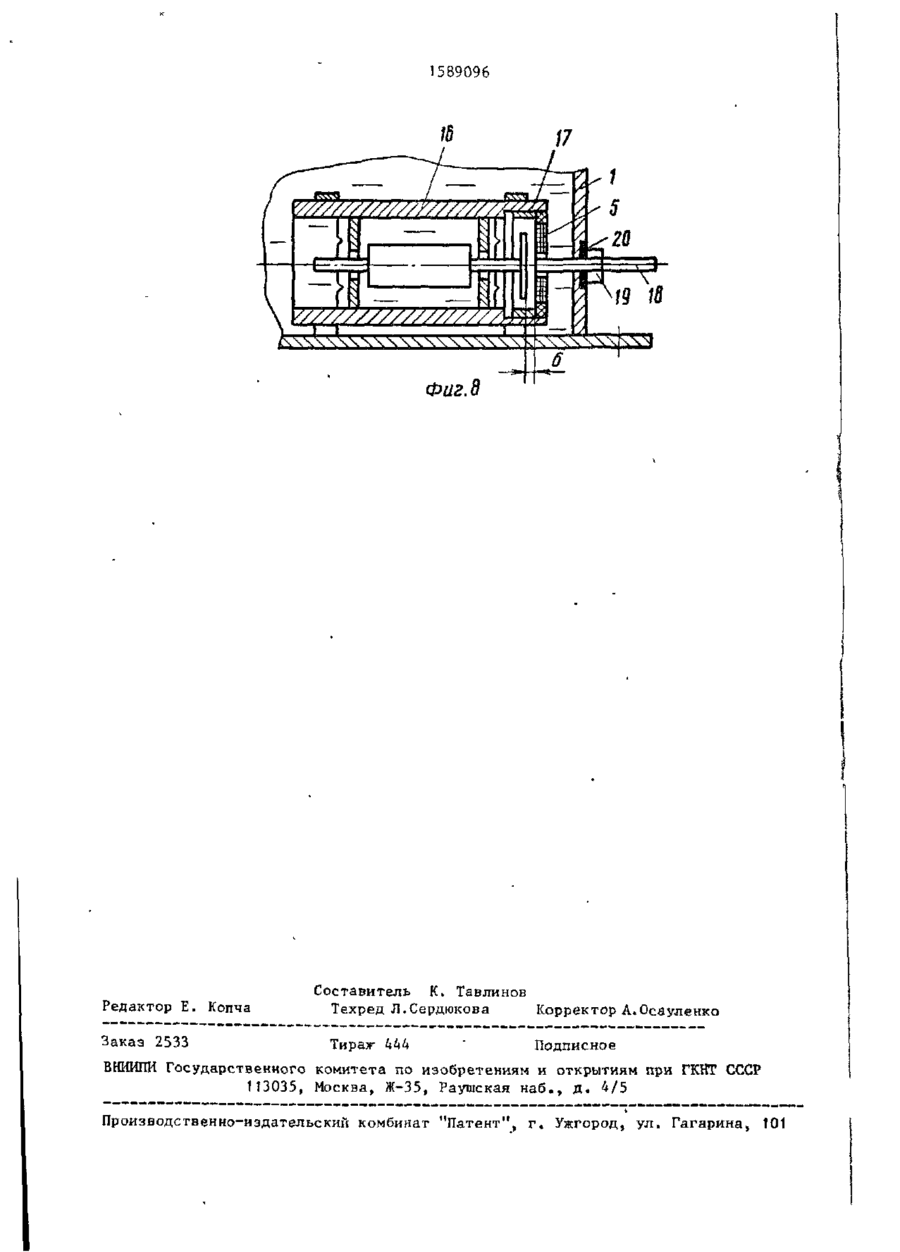
И з о б р е т е н и е о т н о с и т с я к и з м е р и тельной т е х н и к е . Цель и з о б р е т е н и я Фи г. г повышение д о с т о в е р н о с т и к о н т р о л я э л е ментов опоры вращающихся о б ъ е к т о в . Это д о с т и г а е т с я путем исключения п о грешности, с в я з а н н о й с влиянием с о б ственных р е з о н а н с н ы х к о л е б а н и й , на т о ч н о с т ь п р е о б р а з о в а н и я . Корпус у с т р о й с т в а к р е п и т с я к исследуемому о б ъ е к т у , при работе которого возникают измеряемые виброперемещения. Вместе с корпусом перемещаются з а к р е п л е н н ы е в нем ц и л и н д р и ч е с к и е стаканы 2 с ч у в ствительными элементами 5 . При этом инерционные 3 и опорные 6 элементы і остаются неподвижными. В р е з у л ь т а т е изменяется величина рабочего з а з о р а 8 между чувствительными 5 и опорными 6 элементами. Изменения р а б о ч е г о з а зора о преобразуются в сигналы, несущие информацию о виброперемещении и с с л е д у е м о г о объекта по каждой и з т р е х в з а и м н о перпендикулярных с о с т а в ляющих. 5 з . п . ф-лы, 6 и л . 1589096 Изобретение относится к измерительной технике и может быть испольэовано для преобразования в электрический сигнал пространственной вибс рации элементов опоры вращающихся объектов. Целью изобретения является повышение достоверности контроля вибросостояния элементов опоры вращаюtO щихся объектов путем повышения т о ч ности преобразования. Поставленная цель достигается исключением влияния погрешности, с в я занной с собственными резонансными 15 колебаниями. На фиг. 1 изображен предлагаемый преобразователь, общий вид; на фиг. 2 - система преобразования, продольный р а з р е з ; на фиг. 3 - разрез 20 А-А на фиг. 2 ; на Фиг. 4 - векторная диаграмма сил, действующих на и н е р ционный элемент, расположрнный под углом к основанию корпуса преобраз о в а т е л я ; на фиг. 5 - пример шарнир- 25 ного крепления конца пружины узла компенсации на оси инерционного э л е мента; на фиг. 6 - сечение Б-Б на Фиг. 5; на Фиг. 7 - пример исполнения предлагаемого преобразователя, об- ЗО щий вид;нафиг.8 - цилиндрический стакан.., Треккоординатный преобразователь виброперемещений содержит герметичный корпус I , три цилиндрических стакана . 2 , инерционную массу, выполненную в ^ виде трех независимых инерционных элементов 3, упругую систему подвеса, представленную в вице трех независимых комплектов упругих элементов Д, три взаимодействующие пары, каждая до из которых включает чувствительный элемент 5 и опорный элемент 6. Упругая система подвеса дополнительно снабжена узлом 7 компенсации продольной составляющей веса одного из 45 инерционных элементов. 3. Полость корпуса 1 заполнена жидкостным демпфером 8, в качестве которого может быть использована демпфирующая жидкость с малым коэффициентом расши$0 рения, например полиметилсилоксан. Каждый независимый инерционный элемент 3 выполнен, например, в виде свинцового цилиндра, который закреп- 1 лен на оси 9. Каждый независимый комплект упругой системы подвеса может быть выполнен в виде двух упругих элементов 4, например дисковых пружин, обладающих меньшей жесткостью вдоль собственной продольной оси, которые закреплены внутри соответствующего цилиндрического стакана 2. Каждый независимый инерционный элемент 3 соосно установлен внутри соответствующего цилиндрического стакана 2 на упругих элементах 4 с возможностью перемещения только вдоль собственной продольной оси, совпадающей с направлением меньшей жесткости элементов 4. Для того, чтобы исключить возможность поперечных колебаний инерционного элемента 3, отношение расстояния между точками крепления упругих элементов 4 к их диаметру выбрано в пределах 2: J-1 0:1 . Для того, чтобы исключить возможность разрушения полученных колебательных систем в результате резких толчков, например при транспортировке, внутри каждого стакана 2 установлено по два кольца 10, ограничивающих ход инерционного элемента 3 в прямом и обратном направлениях. Каждый чувствительный элемент 5 может быть выполнен, например, в виде катушки индуктивности однокоординатного преобразователя вихретокового типа и подключен к соответствующей независимой резонансной измерительной схеме автогенератора (не показано). При этом торцовая поверхность указанной катушки индуктивности является рабочей поверхностью чувствительного элемента Ь. Каждый чувствительный элемент 5 (катушка индуктивности) может быть соосно закреплен на торце соответствующего цилиндрического стакана 2 или непосредственно на корпусе 1 (не поЦилиндрические стаканы 2 закрепказано) . лены внутри корпуса 1 вдоль трех Каждый опорный элемент 6 может взаимно перпендикулярных осей X,Y,Z. быть выполнен в виде перфорированноНапример, один стакан 2 расположен ^5 го диска из материала, обладающего параллельно вертикальной оси корпувысокой жесткостью и стабильностью са J , а два других - параллельно оси физических характеристик. При испольоснованию под углом 90° друг к другу зовании однокоординатных преобразо(Фиг.О• вателей вихретокового типа указанные 6 1589096 диски должны быть изготовлены из Один конец указанной пружины закрептокопроводящего' материала. лен на стакане 2 жестко, а другой Каждый опорный элемент 6 соосно на оси ? инерционного элемента 3 шарзакреплен на торце оси 9 соответстнйрно^образуя рабочее плечо 11, котовующего инерционного элемента 3. При рое расположено нормально к оси 9. этом его поверхность, обращенная к Длина плеча II выбрана значительно чувствительному элементу 5, является больше величины заданного линейного рабочей поверхностью опорного элеменперемещения конца упомянутой пружнны ? та 6. т.е. исходя из следующего неравенства: Таким образом, чувствительный элеА1 мент 5 и опорный элемент 6 каждой 1 = •»Д1, взаимодействующей пары установлены соосно вдоль одной из трех взаимно где І1 заданная величина липерпендикулярных осей. При этом рабо- 15 нейного перемещения чие поверхности элементов 5 и 6 расконца пружины, необхоположены параллельно друг другу и димая для компенсации нормально к соответствующей оси, об' продольной составляюразуя рабочий зазор о, щей веса Р. соответВеличина рабочего зазора о выби- 20 ствующего инерционно-^ рается в рабочей зоне характеристики го элемента 3 при выбконкретного однокоординатного преобранном значении жесткоразователя . Например, для вихретокости указанной пруживых преобразователей, разработанных ны с 0 ; ХФ ЦКБ Союзэнергоремонта, эта вели25 об - величина углового п е чина находится в диапазоне 1,5-2,0 мм.• ремещения конца упоДля того, чтобы обеспечить возможмянутой пружины, необность перемещения инерционных элеменходимая для компенсатов 3 вдоль собственных продольных ции продольной составосей только при наличии возмущающего ляющей Р 2 веса соответ30 воздействия и исключить такие перествующего инерционного мещения под действием силы тяжести, элемента 3. упругая система подвеса должна При этом Р( = P s i n ft , где Р быть снабжена независимыми узлами 7 вес соответствующего инерционного э л е компенсации продольной составляющей мента 3 , ft - угол наклона продольвеса каждого инерционного элемента ной оси соответствующего инерционно3. Однако при размещении продольной го элемента 3 к основанию корпуса Ї . оси инерционного элемента 3 паралI лельно основанию корпуса 1 продольВ описанном примере реализации ная составляющая его веса равна нулю, fl * 90°» т - е - р 1 * р - Дл я обеспече40 т.е. узел 7 компенсации этой составкия возможности свободного хода конца ляющей не нужен. При этом параллельуказанной пружины, связанного с и н е р но основанию корпуса 1 одновременционным элементом 3 , в стакане 2 но могут быть расположены продольные предусмотрен продольный паз І 2. оси двух инерционных элементов 3 Пример конструктивного выполнения (фиг.1). В данном случае продольные 45 шарнирного крепления конца пружины составляющие веса двух инерционных узла 7 на оси 9 инерционного элемента элементов 3 равны нулю, т.е. система 3 приведен на фиг. 5 и 6. В данном подвеса может быть снабжена узлом 7 случае ось 9 выполнена полой- В ней компенсации продольной составляющей закреплена шпилька 13 с серьгой 14 и веса только одного инерционного эле- 50 предусмотрен паз 15, в который в в е мента 3, расположенного перпендикулярден конец плеча IJ упомянутой пружино основанию корпуса 1. ны, имеющий форму крюка, на который надета серьга 1h. Узел 7 компенсации продольной сое-* Для т о г о , чтобы исключить влияние тавляющей веса инерционного элемента угловых колебаний на точность преоб3 может быть выполнен в виде витой разователя , геометрические центры с т а пружины с малой жесткостью на скруканов 2 могут быть расположены, начивание , которая установлена снарупример, вдоль вертикальной оси преобжи соответствующего стакана 2 (фиг.2). ° 1589096 разования, а центры тяжести инерционных элементов 3 - в геометрических центрах соответствующих стаканов 2. При этом центры тяжести инерционных элементов 3 также будут расположены вдоль указанной оси преобразования (фиг.7)» расположенной вдоль оси у г ловых колебаний. Каждый стакан 2 может быть выполнен в виде коаксиально расположенных цилиндра 16 и втулки Ї7 ( ф и г * 8 ) . Цилиндр 16 закреплен внутри корпуса 1 жестко, а втулка 17 - с возможностью переметений вдоль собственной продольной оси посредством винта 18. При этом чувствительный элемент 5 крепится на торце втулки 17. Положение винта 18 гЫксируется на корпусе 1 гайкой 19. Для обеспечения г е р метичности корпуса 1 предусмотрены прокладки 20. Трехкоординатный преобразователь виброперемещений работает следующим образом. Корпус 1 крепится к исследуемому объекту, например к корпусу подшипника т у р б о а г р е г а т а . При вращении р о тора возникают вибрсперемещения объекта исследований (подшипника)„ к о торые передаются корпусу 1 и переме~ шдют его в пространстве. Вместе с корпусом 1 перемещаются закрепленные в нем цилиндрические стаканы 2 с чувствительными элементами 5. Ври этом благодаря большой степени демпфирования и малой связи со стаканами 2 через упругие элементы 4 , обладающие малой жесткостью, инерционные э л е менты 3 с опорными элементами 6 о с т а ются неподвижными. В результате изменяется величина рабочего зазора о между чувствительными элементами 5 и опорными элементами 6. Эти изменения зазора $ преобразуются в сигналы, например частотно-модулированные при использовании вихретокового п р е образователя, несущие информацию о виброперемещении исследуемого объекта по каждой из трех взаимно п е р пендикулярных составляющих. Эта информация обрабатывается измерительной системой (не п о к а з а н а ) . Результаты обработки отображаются на региераторе (не п о к а з а н ) . Благодаря тому, что инерционная масса выполнена в виде трех независимых инерционных элементов 3, с и с тема подвеса - в виде трех незави* JQ 15 20 25 30 35 4Q 45 50 г 8 симых комплектов упругих элементов 4, а каждый инерционный элемент 3 установлен на независимом комплекте упругих элементов 4 с возможностью перемещения только вдоль собственной продольной оси, обеспечивается возможность получения трех систем преобразования, не связанных между собой через общую инерционную массу и упругую систему подвеса. При, этом размещение полученных систем преобразования внутри цилиндрических стаканов 2 позволяет практически исключить их взаимное влияние через обший демпфер 8, Крепление цилиндрических стаканов 2 внутри корпуса 1 вдоль трех в з а имно перпендикулярных осей и у с т а н о в ка каждого инецерциокного элемента 3 соосно соответствующему цилиндричекому стакану 2 позволяет разместить инерционные элементы 3 строго вдоль трех взаимно перпендикулярных о с е й , т . е . исключить возможность возникновения погрешностей, связанных с о т клонением осей колебательных систем относительно осей преобразования. В результате обеспечивается в о з можность преобразования виброперемещений по каждой из трех координатных осей практически независимо друг от д р у г а . ' Э т о позволяет практически исключить погрешности, связанные с взаимным влиянием колебательных систем. Таким образом, обеспечивается возможность использования общего демпфера с требуемыми демпфирующими свойствами. Это позволяет практически исключить погрешности, связанные с возможностью возникновения вторичных резонансов упругих элементов 4 и с возможностью несовпадения собственных частот колебаний икерционньіх элементов 3. Введение узлов 7 компенсации п р о дольных составляющих веса инерционных элементов 3 может привести к незначительным погрешностям измерения, с в я занным с влиянием упругой пружины на инерционность элемента 3 и с возможностью возникновения эффекта " з а т я гивания", т . е . углового смещения оси 9 соответствующего инерционного э л е мента 3 относительно соответствующей оси преобразования. Предложенная конструкция узла 7 не вносит существенных изменений в работу колебательной системы, а следо 1589096 вательно, и дополнительных погрешностей преобразования, так как использование пружины с малой жесткостью на скручивание позволяет практически иск- г лючить ее влияние на инерционность элемента Зі выбор длины 1 плеча 11 значительно больше величины Д1 заданного линейного перемещения конца упомянутой пружины позволяет уменью шить величину его углового перемещения об і а следовательно, уменьшить эффект "затягивания" оси 9 инерционного элемента 3; использование шарнирного крепления конца пружины на 15 оси 9 инерционного элемента 3 позволяет эффект "затягивания" свести к минимуму; установка пружины узла 7 снаружи, а не внутри соответствующего стакана 2 позволяет разместить 20 указанную пружину с выбранной длиной 1 плеча 11; жесткое крепление второго конца пружины узла 7 позволяет зафиксировать положение полного равновесия инерционного элемента 3, ^5 которое достигается при расположении плеча I1 упомянутой пружины нормально к о си 9 . Крепление чувствительных элементов 5 на торцах соответствующих ста- 30 канов 2 дает возможность получить почти полностью независимые системы преобразования и тем самым свести взаимное их влияние в зоне рабочего зазора £ через общий демпфер к ми- 35 нимуму, а следовательно, практически полностью исключить соответствующую , погрешность преобразования. Использование инерционных элемен40 тов 3, выполненных в виде цилиндров, которые закреплены на осях 9, и размещение их на упругих элементах 4 в виде дисковых пружин позволяет (при выборе указанного расстояния между .г местами крепления элементов 4) исключить поперечные колебания систем преобразования, т.е. исключить возможность возникновения соответствующих погрешностей.. Эта система подвеса может быть ис- 50 пользована только в случае крепления опорных элементов 6 на торцах осей 9 инерционных элементов 3. Однако при этом появляется возможность нежелательного влияния элементов 6 на инер- 55 ционность элементов 3, а также возможность возникновения "маятниковых" колебаний систем преобразования, что Ю может привести к снижению точности преобразователя. Выполнение опорных элементов,' 6 в виде перфорированных дисков позволяет значительно уменьшить их сопротивление при продольных колебаниях инерционных элементов 3 , т , е . свести к минимуму влияние элементов 6 на инерционность колебатетьных систем. Изготовление указанных дисков из материала, обладающего высокой жесткостью и стабильностью физических характеристик, позволяет исключить в о з можность их деформации в процессе колебаний инерционных элементов 3, т . е . обеспечить параллельность рабочих поверхностей чувствительных э л е ментов 5 и опорных элементов 6 при минимальной толщине последних. Минимальная толщина и перфорация дисков снижает до минимума их в е с , а следовательно, и возможность возникновения дополнительных "маятниковых" колебаний инерционных элементов 3. В результате крепление опорных элементов 6 на торцах осей 9 инерционных элементов 3 практически не влияет на колебательные процессы в системах преобразования, а следовательно, и на точность преобразователя. Таким образом, предложенная конструкция преобразователя позволяет п о высить его точность без внесения д о полнительных погрешностей в результаты преобразования. Размещение центров тяжести всех инерционных элементов 3 на одной оси также способствует повышению точности преобразователя путем исключения влияния угловых колебаний на результаты преобразования, так как в этом случае исключается возможность нежелательных колебаний систем вдоль осей преобразования , а следовательно, и соответствующая погрешность. Кроме т о г о , предлагаемый преобразователь обладает более высокой точностью преобразования по сравнению с прототипом за счет т о г о , что в нем исключена резина, которая была использована в качестве упругой системы подвеса и демпфера, а следовательно, о т сутствуют и погрешности, связанные с нестабильностью ее параметров, о с о бенно при высоких температурах а г р е с сивной паромасляной окружающей среды. При этом предлагаемый преобразователь имеет высокие технологические и 11 1589096 эксплуатационные характеристики, которые достигаются за счет обеспечения возможности подстройки рабочего зазора § в процессе изготовления и эксплуатации преобразователя путем перемещения чувствительного элемента с помощью винта 18, связанного с втулкой ] 7 , на которой крепится указанный элемент 5. Таким образом, использование предлагаемого преобразователя может повысить эффективность контроля вибросостояния турбоагрегата и снизить затраты на его эксплуатацию. 15 Ф о р м у л а и з о б р е т е н и я 1. Трехкоординатный преобразователь виброперемещений, содержащий корпус, размещенные в нем инерционную массу с упругой системой подвеса, но демпфер и три взаимодействующие пары, каждая из которых включает" в себя чувствительный и опорный элементы и установлена вдоль одной из взаимно перпендикулярных осей, опорные эле25 менты связаны с инерционной массой, рабочие поверхности чувствительного и опорного элементов каждой пары параллельны друг другу и перпендикулярны соответствующей оси, образуя рабо30 чий заэор, о т л и ч а ю щ и й с я тем, что, с целью повышения достоверности контроля, по крайней мере один из инерционных элементов снабжен узлом компенсации продольной составляю1 щей его веса и тремя цилиндрическими 35 стаканами, закрепленными в корпусе вдоль трех взаимно перпендикулярных осей, каждый чувствительный элемент связан с корпусом, инерционная масса выполнена в виде трех независимых 40 инерционных элементов, упругая система подвеса в виде трех независимых комплектов упругих элементов, обладающих меньшей жесткостью в одном направлении, каждый инерционный элемент установлен соосно в соответствующем цилиндрическом стакане на соответствующем комплекте упругих элементов в направлении их меньшей жест-, 50 12 кости, совпадающем с осью инерционного элемента, с возможностью перемещения вдоль этой оси, каждый опорный элемент соосно закреплен на соответствующем инерционном элементе, демпфер представляет собой жидкость, а каждый узел компенсации продольной составляющей веса инерционного элемента связан с соответствующим инерционным элементом и стаканом. 2. Преобразователь по п. 1, о т личающий.ся тем, что каждый чувствительный элемент соосно закреплен на торце соответствующего цилиндрического стакана. 3. Преобразователь по п. 1, о т л и ч а ю щ и й с я тем, что, с целью расширения эксплуатационных возможностей, каждый опорный элемент выполнен в виде перфорированного диска и закреплен на торце соответствующего инерционного элемента. А. Преобразователь по п . I , о тл и ч а ю щ и й с я тем, что, узел компенсации продольной составляющей веса инерционного элемента выполнен в виде витой пружины, установленной снаружи соответствующего цилиндрического стакана, один конец витой пружины закреплен жестко на стакане, второй шарнирно закреплен на оси инерционного элемента. і 5. Преобразователь по п. ^ о т л и ч а ю щ и й с я тем, ч т о , с ц е лью повышения точности преобразования, центры тяжести инерционных э л е ментов установлены на одной оси, р а с положенной вдоль оси угловых колебаний. 6. Преобразователь по п п . 1 - 3 , о т л и ч а ю щ и й с я тем, ч т о , с ц е лью улучшения эксплуатационных х а рактеристика каждый цилиндрический стакан выполнен в виде коаксиально расположенных и установленных с в о з можностью перемещения вдоль оси, цилиндра и втулки, а на торце последней закреплен чувствительный элемент. ФигЛ А-А 11 Фиг.з ФигЛ 589096 5-5 Фиг. 5 Фиг. 6 Фиг. 7 1589096 У////////////У///А ///////////////////m Фиг. 8 Редактор Е. Копча Заказ 2533 Составитель К. Тавлинов Техред Л.Сердюкоэа Корректор А.Осауленко Тираж kkh " Подписное В И П Государственного комитета по изобретениям и открытиям при ГКНТ СССР КИИ 113035, Москва, Ж-35, Раушская наб., д . 4/5 і Производственно-издательский комбинат "Патент", г . Ужгород, ул. Гагарина, 101
ДивитисяДодаткова інформація
Автори англійськоюYehorova Vira Anatoliivna, Tsybulko Vadym Yosypovych, Meteliov Leonid Dmytrovych, Kvashyn Mykhailo Fedovych
Автори російськоюЕгорова Вера Анатольевна, Цибулько Вадим Иосифович, Метелев Леонид Дмитриевич, Квашин Михаил Федорович
МПК / Мітки
МПК: G01M 7/00
Мітки: трикоординатний, вібропереміщень, перетворювач
Код посилання
<a href="https://ua.patents.su/10-349-trikoordinatnijj-peretvoryuvach-vibroperemishhen.html" target="_blank" rel="follow" title="База патентів України">Трикоординатний перетворювач вібропереміщень</a>
Фільтр для очистки масла

Номер патенту: 514
Опубліковано: 30.04.1993
Автор: Колтунов Анатолій Миколайович
МПК: B01D 27/00
Формула / Реферат:
Фильтр для очистки масла преимущественно в двигателях внутреннего сгорания, содержащий корпус, крышку, съемный фланец, размещенный на нем фильтрующий элемент и стяжной болт для крепления фильтрующего элемента с установленными на нем центральной пружиной и противодренажным клапаном, отличающийся тем, что, с целью увеличения срока службы, повышения надежности в работе, снижения материалоемкости и упрощения монтажа, противодренажный клапан...
Фільтр для очистки масла

Номер патенту: 459
Опубліковано: 30.04.1993
Автор: Колтунов Анатолій Миколайович
МПК: B01D 27/00
Формула / Реферат:
(57) 1. ФИЛЬТР ДЛЯ ОЧИСТКИМАСЛА преимущественно в двигателе внутреннего сгорания, содержащий корпус, крышку и размещенный внутри корпуса фильтрующий элемент с перепускным и противодренажным клапанами, отличающийся тем, что с целью многократного использования фильтра, фильтр снабжен стопорным элементом, размещенным внутри корпуса у его верхней кромки, съемным фланцем с центральным резьбовым отверстием, разрезным запорным кольцом,...
Шестерена гідромашина

Номер патенту: 461
Опубліковано: 30.04.1993
Автори: Новак Олег Васильович, Белянський Едуард Максимович, Заброцький Олександр Павлович, Аскері Мухамед Алі син Наги, Чайковський Анатолій Олександрович, Златопольський Марко Юхимович, Лесючок Вадим Іванович
МПК: F04C 2/08
Мітки: шестерена, гідромашина
Формула / Реферат:
1. Шестеренная гидромашина внешнего зацепления, содержащая размещенные в цилиндрических расточках корпуса шестерни с цапфами, установленными в подшипниках скольжения, сопряженные с торцами шестерен компенсаторы торцовых зазоров, размещенные в пазах, выполненных на нерабочей поверхности компенсаторов, эластичные манжеты 3-образной формы с защитными элементами, установленными со стороны подшипников скольжения, и полости высокого и низкого...
Попередній патент: Відстійник
Наступний патент: Калібрувальний вібростенд
Випадковий патент: Електрохімічна система накопичення енергії