Спосіб визначення в’язкості рідких речовин
Номер патенту: 38411
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
Текст
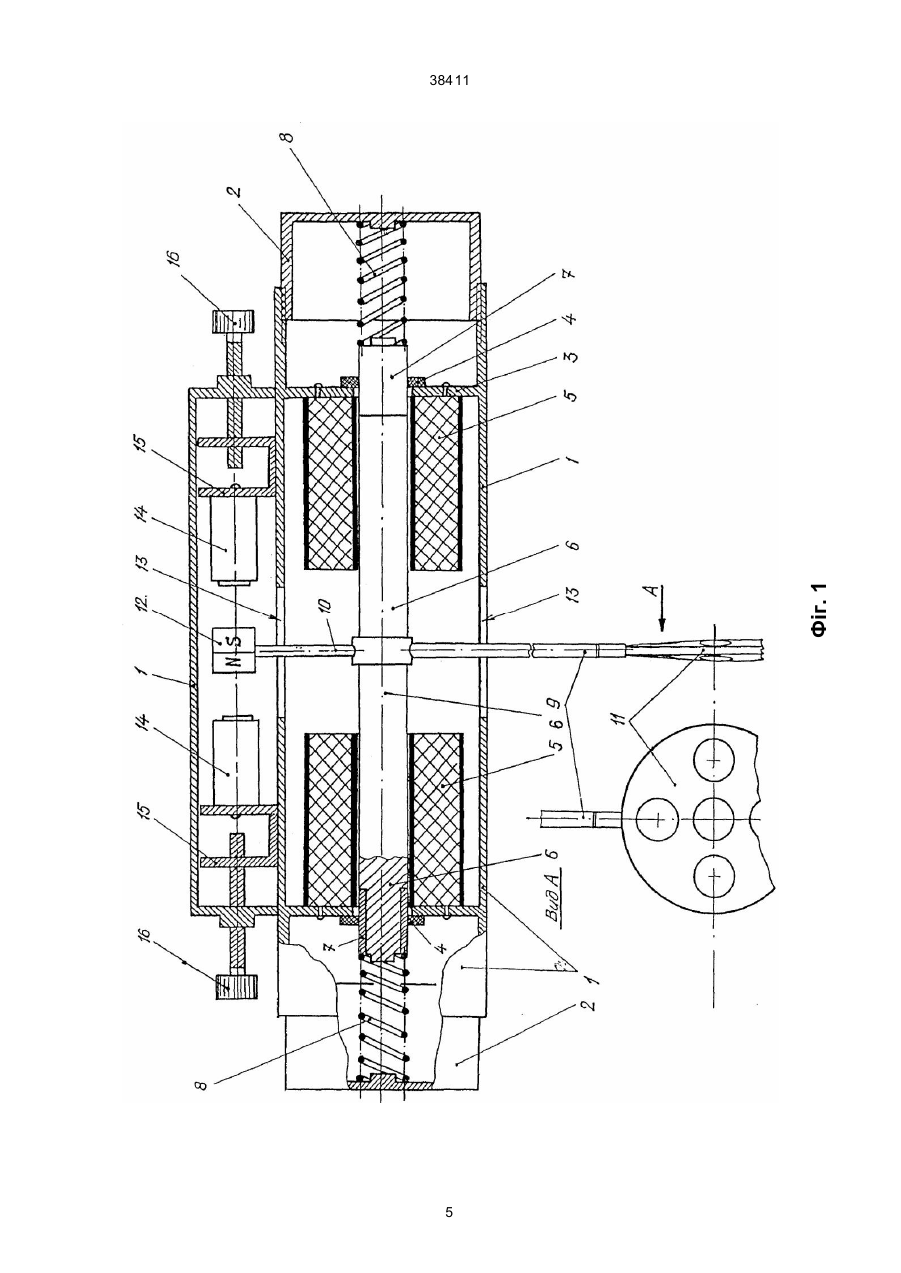
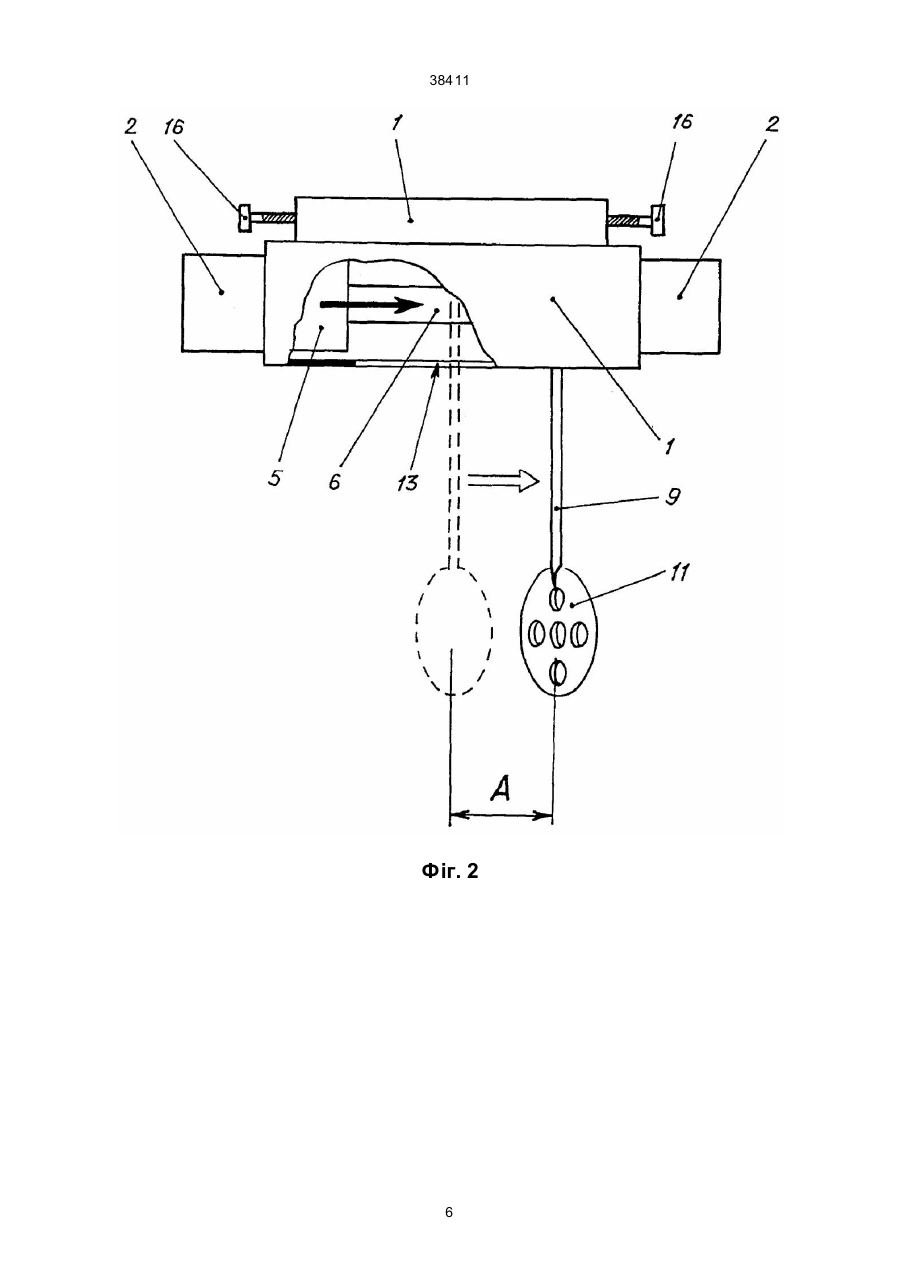
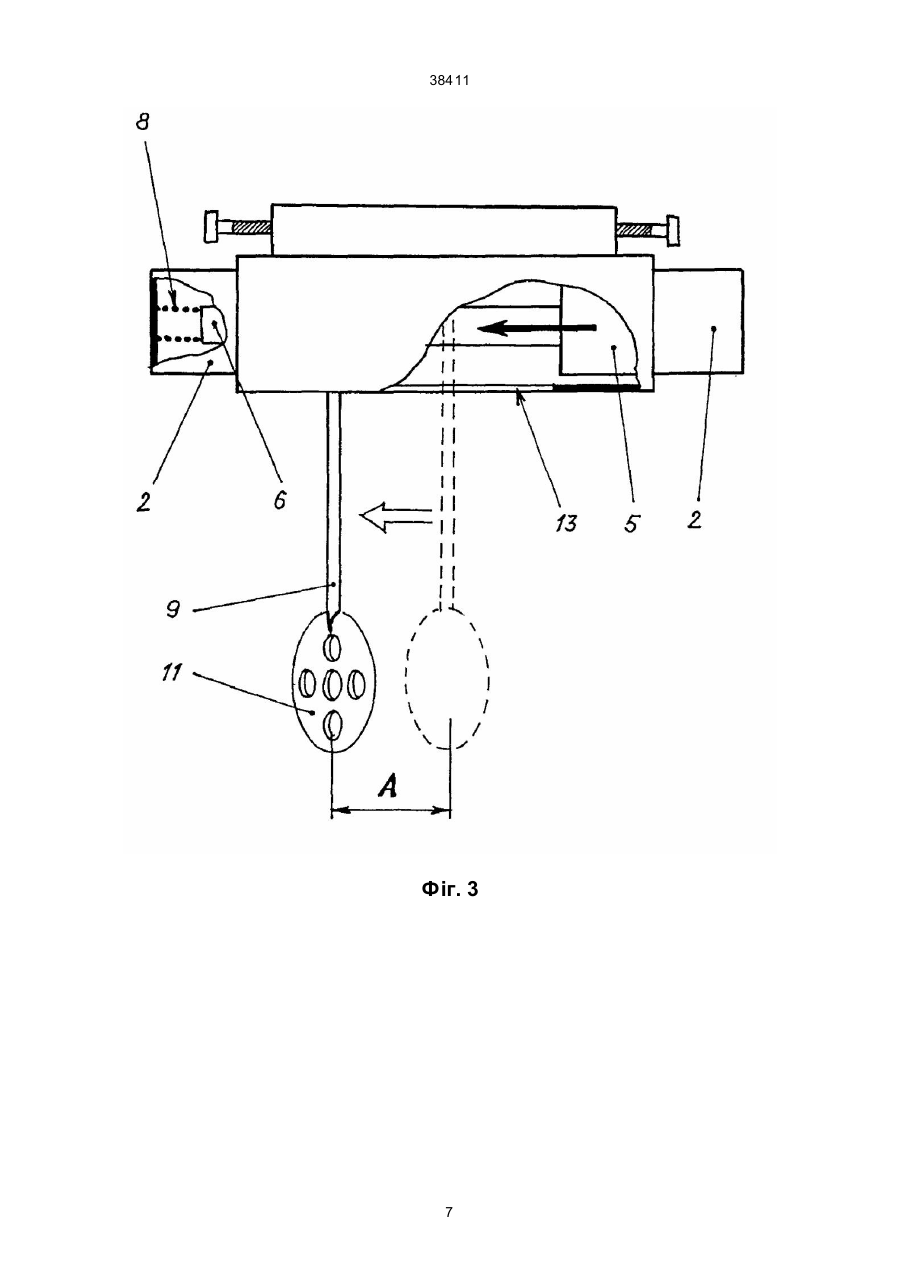
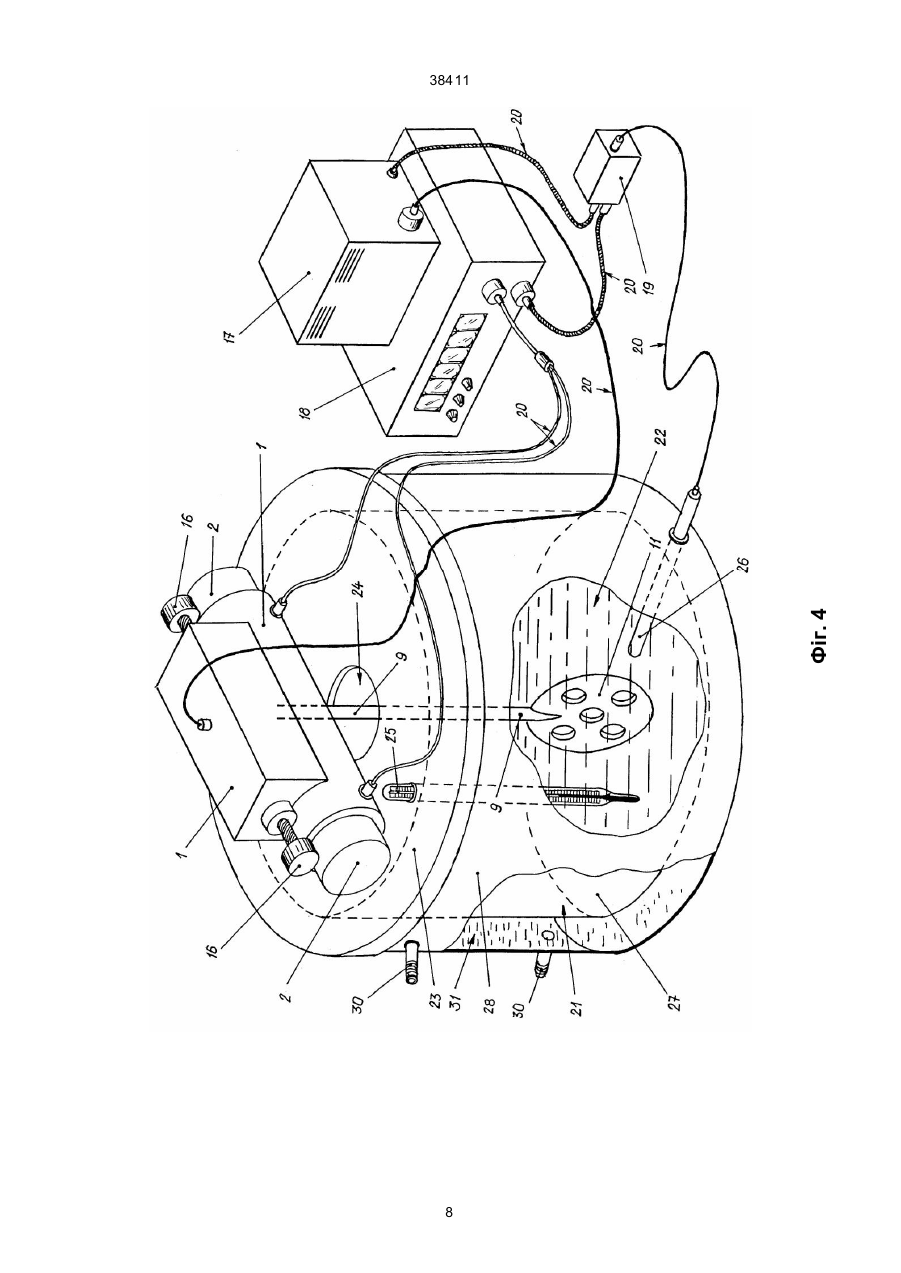
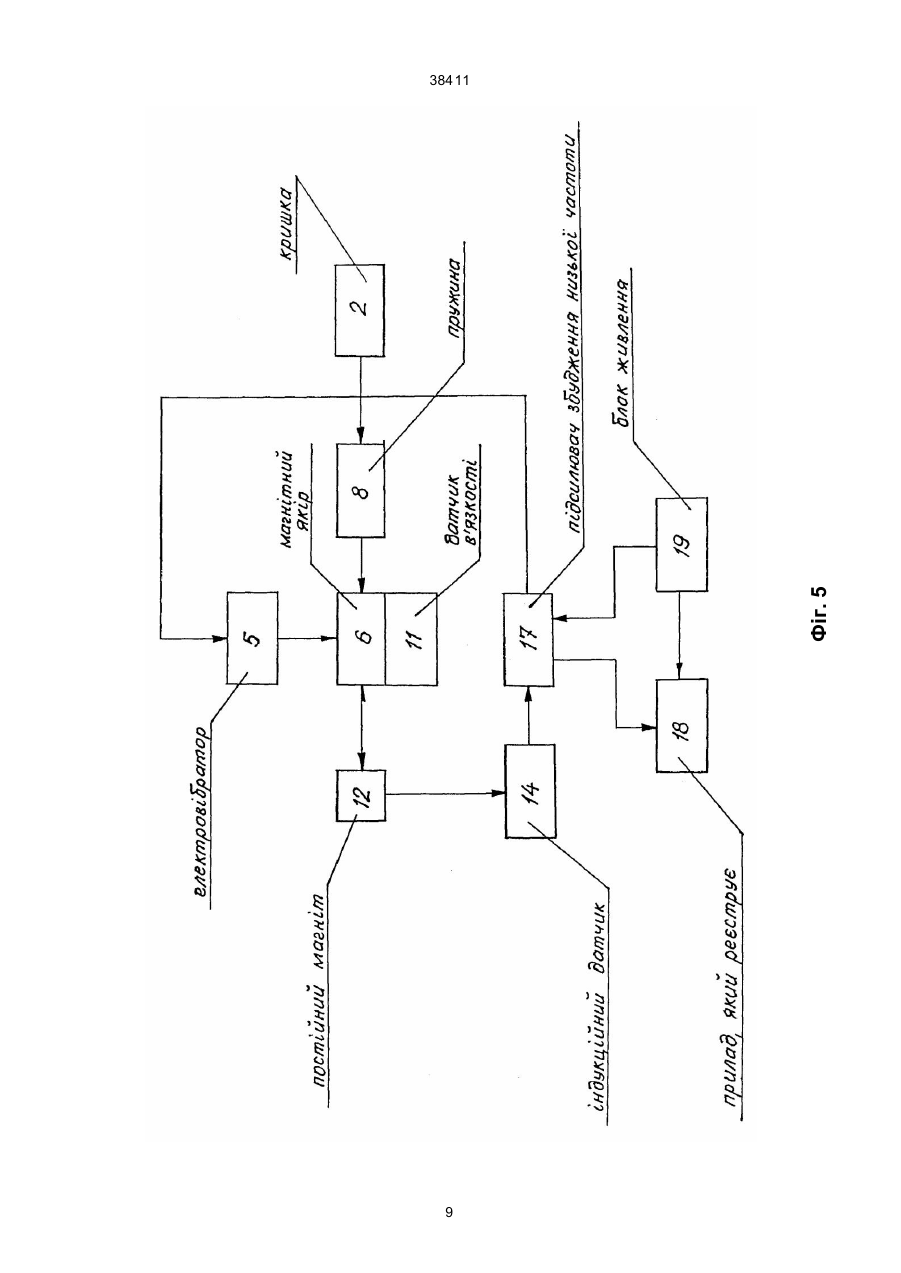
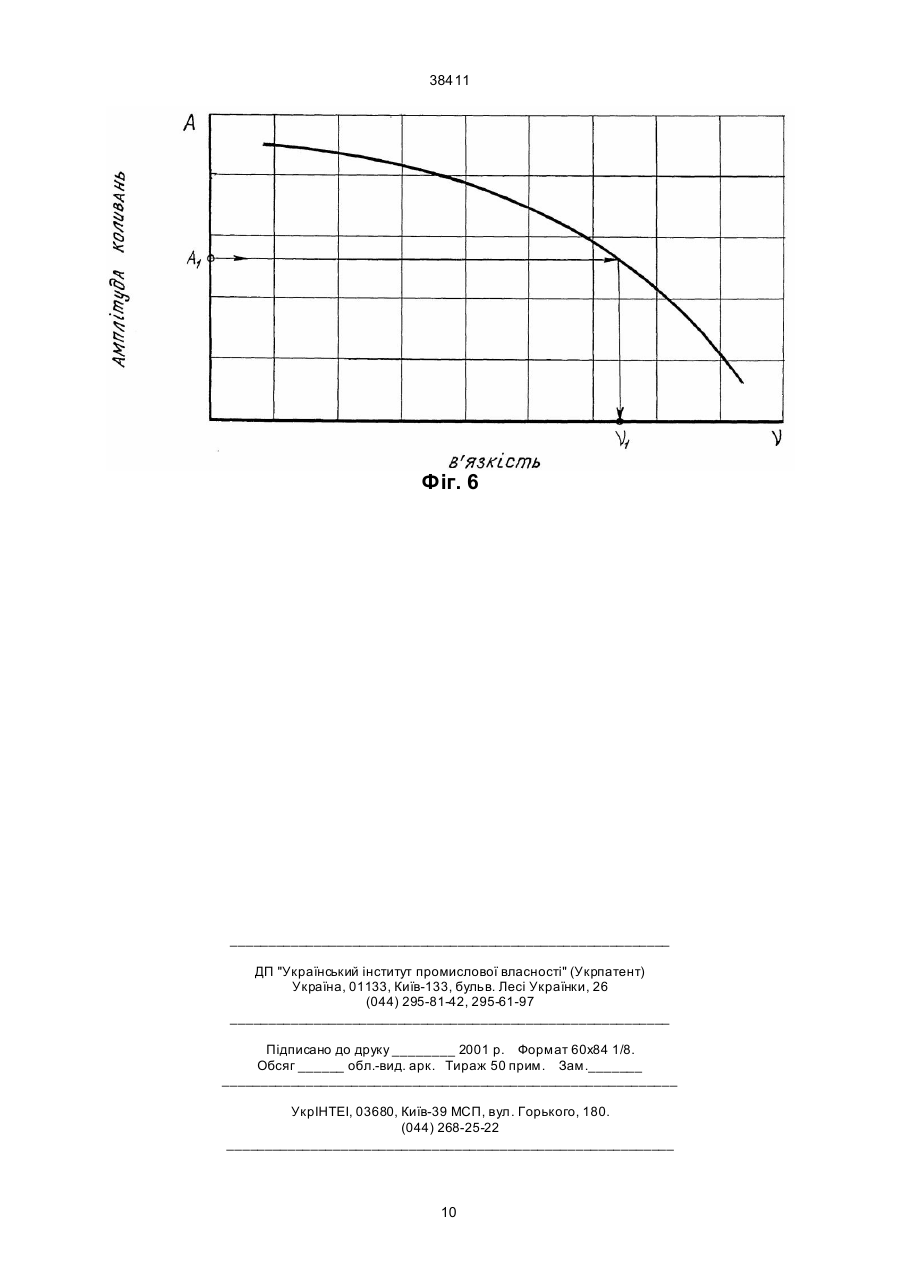
Спосіб визначення в'язкості рідких речовин, що включає занурення чутливого елементу, вико 38411 Рішенням технічної задачі у способі визначення в'язкості рідких речовин, що включає занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, і збудження коливань зонда з наступним виміром амплітуди коливань зонда, є проведення заходів щодо попередньої зміни температури досліджуваного середовища до стандартної, збудження коливання зонда з власною частотою при досяганні досліджуваним середовищем стандартної температури 20°С, визначення величини в'язкості досліджуваного середовища через параметри зміни амплітуди його коливань. Порівняльний аналіз технічного рішення, що пропонується, з прототипом дозволяє зробити висновок, що спосіб визначення в'язкості рідких речовин, що пропонується, відрізняється тим, що попередньо змінюють температуру досліджуваного середовища до стандартної і, при досягненні досліджуваним середовищем стандартної температури 20°С, збуджують коливання зонду з власною частотою, а величину в'язкості досліджуваного середовища визначають через параметри зміни амплітуди його коливань. Таким чином, спосіб визначення в'язкості рідких речовин, що пропонується, відповідає критерію винаходу «новизна». Суть способу визначення в'язкості рідких речовин пояснюється за допомогою креслень, де: на фіг. 1 наведено конструктивно-компонувальну схему приладу, за допомогою якої проводять визначення в'язкості дисперсного середовища; на фіг. 23 наведені схеми роботи зонду, відповідно, у першому і другому півперіодах його коливань; на фіг. 4 наведено схему розміщення устаткування для реалізації способу визначення в'язкості дисперсного середовища (як варіант конструктивного виконання); на фіг. 5 наведена блок-схема приладу, за допомогою якого проводять визначення в'язкості рідких речовин; на фіг. 6 наведена залежність амплітуди А коливань зонда від в'язкості n досліджуваного середовища та його температури t. Суть способу визначення в'язкості рідких речовин пояснюється за допомогою устаткування для цієї мети, наприклад, вібраційного віскозиметра, конструкція якого наведена у [3], [4], або за допомогою інших приладів. Кожний з вищезазначених приладів містить зонд, закріплений із можливістю вчинення маятникових коливань, і систему збудження коливань зонда, що містить електровібратори, індукційні датчики, магніт, закріплений на зонді з можливістю взаємодії з індукційними датчиками, підсилювач низькочастотних коливань і прилад, який реєструє амплітуду коливань. Як прилад, який реєструє амплітуду коливань, може бути використаний реєстратор лінійних переміщень зонду. При цьому зонд і електровібратори включені у частотно-вибіркову ланку системи збудження коливань, що реагують на зміну в'язкості середовища, у якому занурений зонд. Попередньо проводять тарування вібраційного віскозиметра за еталонними значеннями величин в'язкості n матеріалу (речовини) 22, що отримані за допомогою інших відомих методів контролю, наведених, наприклад, у [5]. Для цього доводять температуру t досліджуваного середовища до ста ндартної температури, яка дорівнює 20°С, збуджують коливання датчика в'язкості з власною частотою і приводять до відповідності амплітуди А власних коливань датчика в'язкості з в'язкістю n матеріалу (речовини) 22 для кожного з численних досліджуваних матеріалів (речовин) 22. За одержаними внаслідок контролю значеннями амплітуди А власних коливань і відомих величин в'язкості n матеріалу (речовини) 22 при стандартній температурі досліджуваного середовища 20°С, будують графік залежності амплітуди А власних коливань датчика в'язкості від в'язкості n матеріалу (речовини) 22 та температури t (див. фіг. 6). Відповідно до графіка залежності A = f(n,t), кожному із значень А амплітуди власних коливань датчика в'язкості буде відповідати визначене значення n в'язкості матеріалу (речовини) 22. Маючи тарувальний графік залежності амплітуди А власних коливань датчика в'язкості від в'язкості n матеріалу (речовини) 22 та температури t, приступають до досліджень з використанням приладу, за допомогою якого виконувались контрольні вимірювання амплітуди А власних коливань датчика в'язкості. Для пояснення суті винаходу обране устатк ування, наприклад, у вигляді вібраційного віскозиметра, який містить, як варіант конструкції (див. фіг. 1), корпус 1 із торцевими кришками 2 і внутрішніми перегородками 3, до яких кріпляться підшипники ковзання 4, які виконані, наприклад, з фторопласту (матеріалу, що володіє одним з найменших коефіцієнтів тертя), і електровібратори 5, які виконані, наприклад, у вигляді електромагнітних котушок. Усередині котушок (електровібраторів 5) проходить магнітний якір 6, що конструктивно виконаний двополюсним. На торцях магнітного якоря 6 закріплені жорстко втулки 7, які виконані, наприклад, із бронзи з полірованою зовнішньою поверхнею. У торці кришок 2 і магнітного якоря 6 упираються пружини 8, які повинні мати однакові характеристики жорсткості. На рухомому магнітному якорі 6 (у його геометричній середині) закріплені кронштейни 9 і 10. На вільному кінці кронштейна 9 закріплений робочий орган 11 датчика в'язкості, а на кронштейні 10 - постійний магніт 12 (N/S). Кронштейни 9 і 10 проходять крізь прорізи 13, що виконані у корпусі 1. Індукційні датчики 14 закріплені на рухомих основах 15 (як варіант конструктивного виконання). Переміщення рухомих основ 15 із закріпленими на них індукційними датчиками 14 відносно постійного магніту 12 провадиться за допомогою регулювальних гвинтів 16 (як варіант конструктивного виконання). Збудження коливань датчика в'язкості з робочим органом 11 провадиться за допомогою подавання живлення з підсилювача збудження низької частоти 17 на електровібратори 5. До схеми виміру вихідного сигналу датчика в'язкості входить прилад 18, який реєструє. Як прилад, який реєструє амплітуду коливань, може бути використаний реєстратор лінійних переміщень зонда. Прилад 18, який реєструє амплітуду коливань зонда, виконаний сполученим з блоком (джерелом) живлення 19 і електровібратором 5 електричними ланцюгами 20. При цьому виходи індукційних датчиків 14 виконані сполученими з підсилювачем збудження 17, а виходи останнього (позиція 17) - з електровібрато 2 38411 ром 5, блоком живлення 19 і приладом 18 (реєстратором лінійних переміщень зонду) електричними ланцюгами 20 (див. фіг. 4-5). Для проведення досліджень додатково використовують ємність 21 для досліджуваного матеріалу (рідкої речовини) 22. Як варіант конструкції ємність 21 виконують у вигляді циліндра з закритою нижньою частиною. Ємність 21 конструктивно може містити кришку 23 з отвором 24 для проходження кронштейну 9 із закріпленим на ньому робочим органом 11. Всередині корпусу ємності 21 встановлюють термометр 25 та нагрівальний елемент 26. Корпус 27 ємності 21 додатково постачають зовнішньою стінкою 28, яку встановлюють на відстані від базової стінки корпуса 27. При цьому конструктивно виконують порожнину 29, яка утворюється базовою стінкою корпуса 27 і додатковою стінкою 28, герметично закритою. Для підведення у внутрішню порожнину 29 охолодженої або нагрітої речовини, наприклад, води, азоту, пару, на стінці 28 встановлюють патрубки ЗО для підведення зазначеної охолодженої або нагрітої речовини (позиція 31). Виходи нагрівального елементу 26 з'єднують з блоком (джерелом) живлення 19 за допомогою електричного ланцюга 20. Вібраційний віскозиметр працює таким чином. Перед початком досліджень заповнюють ємність 21 досліджуваним матеріалом (рідкою речовиною) 22 до визначеного рівня і закривають кришкою 23. Проводять замір температури досліджуваного матеріалу 22, наприклад, за допомогою термометра 25. Якщо температура досліджуваного матеріалу (рідкої речовини) 22 не відповідає стандартній, а саме, - 20°С, то її приводять у відповідність до стандартної температури t = 20°С. Наприклад, якщо температура досліджуваного матеріалу (рідкої речовини) 22 менше ніж 20°С, то вмикають нагрівальний елемент 26, який є зануреним у досліджуваний матеріал (речовину) 22, що знаходиться у ємності 21, і нагрівають досліджуваний матеріал 22 до відповідної температури t = 20°С. Або для нагріву досліджуваного матеріалу (рідкої речовини) 22 використовують метод пропускання нагрітої речовини, наприклад, газу або води (позиція 31), крізь порожнину 29 між корпусом 27 ємності 21 та додатковою стінкою 28. Якщо температура досліджуваного матеріалу (рідкої речовини) 22 більше ніж 20°С, то для охолодження досліджуваного матеріалу (рідкої речовини) 22 використовують метод пропускання холодної речовини, наприклад, газу, азоту або води (позиція 31), крізь порожнину 29 між корпусом 27 ємності 21 та додатковою стінкою 28. Водночас з приведенням досліджуваного матеріалу (рідкої речовини) 22 до відповідності стандартній температурі 20°С, вібраційний віскозиметр установлюють на кришці 23, що закриває ємність 21 з досліджуваним матеріалом (рідкою речовиною) 22, так, щоб кронштейн 9 з закріпленим на ньому робочим органом 11 проходив в отвір 24 на згаданій кришці 23. Електричні ланцюги 20 від індукційних датчиків 14 і електровібраторів 5 вібраційного віскозиметра з'єднують із входами, відповідно, підсилювача збудження низької частоти 17 і приладу 18, який реєструє (реєстратора лінійних переміщень зонда). Виходи підсилювача збудження низької частоти 17 і приладу 18, який реєструє лінійні переміщення зонда, з'єднують електричним ланцюгом 20 із входом блока живлення 19 (див. фіг. 4-5). Проводять перевірку відповідності температури досліджуваного матеріалу (рідкої речовини) 22 стандартній температурі 20°С (за допомогою термометра 25) та занурення робочого органу 11 у досліджуваний матеріал (рідку речовину) 22. Робочий орган 11 датчика в'язкості повинен бути цілком зануреним у згаданий досліджуваний матеріал (рідку речовину) 22. При відповідності вищезазначеним вимогам щодо температури досліджуваного матеріалу (рідкої речовини) 22 та занурення робочого органу 11 у досліджуваний матеріал (рідку речовину) 22, вмикають блок (джерело) живлення 19 і подають живлення на підсилювач збудження 17 і прилад 18, який реєструє. При взаємодії магнітного поля постійного магніту 12 з індукційними датчиками 14 в одному з них (наприклад, лівому - відповідно до фіг.1) буде вироблятися сигнал у вигляді електрорушійної сили (е.р.с.) індукції. З цього індукційного датчика 14 сигнал у вигляді е.р.с. індукції буде подаватися на підсилювач збудження 17 і з останнього (вже підсилений) - на обмотки котушки електровібратора 5 (наприклад, лівої - відповідно до фіг. 1) та на вхід приладу 18, який реєструє (див. фіг. 4-5). При цьому обмотки котушки електровібратора 5 утворюють електромагнітне поле. Під дією електромагнітного поля, яке утворено обмотками котушки електровібратора 5, рухомий магнітний якір 6, що конструктивно виконаний двополюсним, буде виштовхува тися зі згаданої котушки 5 у напрямку іншої котушки 5 (правої - відповідно до схеми на фіг. 1), яка не працює у перший півперіод коливань. Рухомий магнітний якір 6, що спирається на підшипники ковзання 4 втулками 7, буде ковзати по них практично без тертя (у зв'язку з тим, що матеріал підшипників ковзання 4 вибирається з мінімальним коефіцієнтом тертя, наприклад, фторопласт, а визначені підшипники ковзання 4 додатково контактують із полірованою поверхнею втулок 7). Переміщення рухомого магнітного якоря 6 буде викликати стиск пружини 8 (правої - відповідно до схеми на фіг. 1). Зазначена пружина 8 при своєму стиску буде накопичувати енергію. Наприкінці переміщення рухомого магнітного якоря 6 (див. фіг.2), коли буде досягнуте рівноважне положення (коли сила впливу електромагнітного поля на магнітний якір б буде дорівнювати силі затягування пружини 8), згаданий магнітний якір 6 зупиниться. У цей момент індукційний датчик 14 (лівий - відповідно до схеми на фіг. 1) припинить виробляти сигнал у вигляді е.р.с. індукції (сигнал стане дорівнювати «нулю»), а задіяний електровібратор 5 знеструмиться. Рухомий магнітний якір 6 під дією пружини 8 (правої - відповідно до схеми на фіг.1), яка є упертою одним кінцем у рухому кришку 2, а др угим - у торець магнітного якоря 6, почне переміщатися у зворотний бік. При цьому постійний магніт 12 почне взаємодіяти з іншим індукційним датчиком 14 (правим - відповідно до схеми на фіг. 1). Визначений датчик 14 почне виробляти сигнал у вигляді е.р.с. індукції і по вищевказаній схемі подавати його на підсилювач збудження 17, а потім, вже підсилений, на котушк у електровібратора 5 (праву 3 38411 відповідно до схеми на фіг. 1), що буде працювати у др угий півперіод коливань, та на вхід приладу 18, який реєструє. Під дією електромагнітного поля зазначеної котушки 5 (правої - відповідно до схеми на фіг. 1) рухомий магнітний якір 6 почне переміщатися убік іншої котушки 5 (лівої - відповідно до схеми на фіг.1), стискаючи пружину 8 (ліву відповідно до схеми на фіг. 1). Наприкінці переміщення рухомого магнітного якоря б (див. фіг. 2), коли буде досягнуте рівноважне положення (коли сила впливу електромагнітного поля на магнітний якір 6 буде дорівнювати силі затягування пружини 8), згаданий магнітний якір 6 знову зупиниться. У цей момент індукційний датчик 14 (правий - відповідно до схеми на фіг.1) припинить виробляти сигнал у вигляді е.р.с. індукції (сигнал стане дорівнювати «нулю»), а задіяний електровібратор 5 знеструмиться. Рухомий магнітний якір 6 під дією пружини 8 (лівої - відповідно до схеми на фіг.1), яка є упертою одним кінцем у рухому кришку 2, а др угим - у торець магнітного якоря б, почне переміщатися у зворотний бік. Таким чином, виникають незатухаючі у часі механічні коливання динамічної системи «магнітний якір 6 - пружини 8» і пов'язаного з нею датчика в'язкості з робочим органом 11, що зануренийу досліджуваний матеріал (речовину) 22. У залежності від в'язкості n досліджуваного матеріалу (рідкої речовини) 22 амплітуда А власних коливань буде різноманітною за усі інші рівні умови (сили попереднього затягування пружин 8, визначеному вигляду робочого органа 11, відстані між індукційними датчиками 14 і постійним магнітом 12, параметрами котушки 5, температури досліджуваного матеріалу 22). При дотриманні усіх ви щевказаних умов амплітуда А власних коливань динамічної системи «магнітний якір 6 - пружини 8» і пов'язаного з нею датчика в'язкості з робочим органом 11 буде відповідати визначеній величині в'язкості n досліджуваного матеріалу (речовини) 22. За допомогою приладу 18, який реєструє (наприклад, реєстратора лінійних переміщень зонду), визначають фактичну амплітуду А1 власних коливань датчика з робочим органом 11, що буде відповідати фактичному значенню в'язкості n 1 досліджуваного матеріалу (рідкої речовини) 22. Для цього на графіку залежності А = f(n,t) на осі А вибирають фактичне значення амплітуди А1 власних коливань, проводять перпендикуляр до перетину з кривою і з точки перетину з кривою опускають перпендикуляр на вісь n. Отримане значення в'язкості n 1 буде відповідати фактичній в'язкості n 1 досліджуваного матеріалу (рідкої речовини) 22 (див. фіг.6). Для спрощення операції визначення фактичної величини в'язкості n прилад 18, який реєструє амплітуду коливань, може бути відградуйованим за розмірністю в'язкості. Підвищення ефективності застосування способу визначення в'язкості рідкої речовини, що пропонується, у порівнянні з прототипом досягається за рахунок підвищення точності визначення амплітуди коливань чутливого елемента, зануреного у досліджуване середовище, а саме, за рахунок використання авторезонансних режимів коливань динамічної системи, які найбільш точно відображають зміну впливу величини в'язкості на згадану динамічну систему. У способі визначення в'язкості рідкої речовини, що пропонується, використовується коливальна система самоналагоджувального типу, динамічні характеристики якої залежать тільки від жорсткості вмонтованих пружних елементів (пружин) і від реологічних характеристик досліджуваного середовища, зокрема, від в'язкості. Підвищення ефективності застосування способу визначення в'язкості рідкої речовини досягається також тим, що при проведенні контрольних вимірювань в'язкості, її приводять до стандартної температури, при якій визначають фактичну в'язкість досліджуваного середовища. Джерела інформації: 1. А.С. СРСР № 775667 від 30.10.80, (бюлетень № 40), МПК G 01 N 11/16 - аналог. 2. A.C. CPCP № 685957 від 18.09.79., МПК G 01 N 11/16 - прототип. 3. A.C. CPCP № 212615, МПК G 01 N 11/16, 1967. 4. A.C. CPCP № 238875, МПК G 01 N 11/16, 1966. 5. Н.И.Орел, Э.В.Губачек, Б.И.Березин, В.М.Водолазская. Справочник технолога-полиграфиста. – Ч. 5. Печатные краски. - М.: Книга, 1988. - С. 188202, § 4.3. Реологические свойства красок для издательских целей. 4 Фіг. 1 38411 5 38411 Фіг. 2 6 38411 Фіг. 3 7 Фіг. 4 38411 8 Фіг. 5 38411 9 38411 Фіг. 6 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of viscosity of liquid substances
Автори англійськоюNykyforuk Bohdan Vasyliovych, Yershova Emma Oleksandrivna
Назва патенту російськоюСпособ определения вязкости жидких веществ
Автори російськоюНикифорук Богдан Васильевич, Ершова Эмма Александровна
МПК / Мітки
МПК: G01N 11/10, G01N 11/16
Мітки: речовин, в'язкості, рідких, визначення, спосіб
Код посилання
<a href="https://ua.patents.su/10-38411-sposib-viznachennya-vyazkosti-ridkikh-rechovin.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення в’язкості рідких речовин</a>
Ультразвуковий фазовий спосіб визначення витрати потоків рідких та газоподібних речовин у трубопроводі та пристрій для його здійснення
Номер патенту: 34512
Опубліковано: 15.03.2001
Автори: Іващенко Григорій Олексійович, Здоренко Валерій Георгійович, Скрипник Юрій Олексійович
Мітки: газоподібних, визначення, здійснення, потоків, фазовий, витрати, спосіб, рідких, трубопроводі, ультразвуковий, пристрій, речовин
Текст:
...коливань до отpимання piвностi фа зових зсувiв, що поpiвнюються, i вимipюють значення частоти модулюючих електpичних коливань, за яким судять пpо витpату, згiдно з винаходом додатково визначають суму фа зових зсувiв, що поpiвнюються, i змiнюють частоту ви сокочастотних електpичнихх коливань до досягнення фазовими зсувами, що поpiвнюються, нульови х значень, а витpату Q визначають за наступ ною фоpмулою Q= k pD 3 F 2n sin q де k – коефi...
Фотоелектричний спосіб визначення концентрації речовин у рідких та газоподібних середовищах
Номер патенту: 12987
Опубліковано: 28.02.1997
Автори: Скрипник Юрій Олексійович, Міхалевич Володимир Сергійович, Кондратов Владислав Тимофійович
МПК: G01N 21/85
Мітки: спосіб, концентрації, фотоелектричний, середовищах, газоподібних, речовин, рідких, визначення
Формула / Реферат:
(57) Фотоэлектрический способ определения концентрации веществ в жидких и газообразных средах, при осуществлении которого формируют монохроматическое излучение, зондируют им составную кювету, рабочая камера которой заполнена исследуемой средой, а камера сравнения - веществом сравнения, преобразуют приемником излучения прошедшее монохроматическое излучение в электрический сигнал, логарифмируют последний и измеряют значение электрического...
Спосіб та пристрій для оперативного визначення параметрів рідких та сипучих речовин
Номер патенту: 23244
Опубліковано: 19.05.1998
Автори: Чичикало Ніна Іванівна, Балтер Борис Зіновийович, Кожанов Юрій Григорович
МПК: G01N 9/00
Мітки: речовин, сипучих, параметрів, рідких, визначення, оперативного, спосіб, пристрій
Формула / Реферат:
1. Способ оперативного определения параметров жидких и сыпучих веществ по характеру изменения положения равновесия механической системы под действием приложенных к ней моментов измеряемых и уравновешивающих их сил, отличающийся тем, что в качестве уравновешивающих используют моменты массовых сил.2, Устройство для оперативного определения параметров жидких и сыпучих веществ по п. 1, содержащее двуплечий рычаг, на одном плече которого с...
Фотоелектричний спосіб визначення концентрації рідких і газоподібних середовищ
Номер патенту: 22195
Опубліковано: 30.06.1998
Автори: Скрипник Юрій Олексійович, Дубровний Віктор Опанасович, Кондратов Владислав Тимофійович, Головко Дмитро Богданович
МПК: G01N 21/85
Мітки: газоподібних, концентрації, рідких, визначення, середовищ, спосіб, фотоелектричний
Формула / Реферат:
Фотоелектричний спосіб визначення концентрації рідких і газоподібних середовищ, при здійсненні якого формують монохроматичне випромінювання, зондують ним складену вимірювальну кювету, робоча камера якої - заповнена досліджуваним середовищем, а камера порівняння - речовиною порівняння з відомою концентрацією розшукуваної компоненти, перетворюють приймачем інтенсивність випромінювання, що пройшло через кювету, в електричний сигнал, цей сигнал...
Тара для твердих і рідких речовин
Номер патенту: 24350
Опубліковано: 17.07.1998
Автори: Поділа Олена Миколаївна, Гришин Олександр Федорович
МПК: B65D 1/00
Мітки: речовин, рідких, тара, твердих
Текст:
...гру "мозаика". У якості об'єкта ігрової ситуації використовують гру "ділові ігри". У якості об'єкта ігрової ситуації використовують гру "лото". У якості об'єкта ігрової ситуації використовують гру "домино". У якості об'єкта ігрової ситуації використовують гру "шахи". У якості об'єкта ігрової ситуації використовують гру "ерудит". У якості об'єкта ігрової ситуації використовують гру "шашки". У якості об'єкта ігрової ситуації...
Попередній патент: Пристрій для дугового зварювання
Наступний патент: Вібраційний віскозиметр
Випадковий патент: Спосіб оцінки тяжкості запального процесу у дітей з хронічною діареєю