Пристрій для вимірювання в’язкості рідких речовин
Номер патенту: 38594
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович


Текст
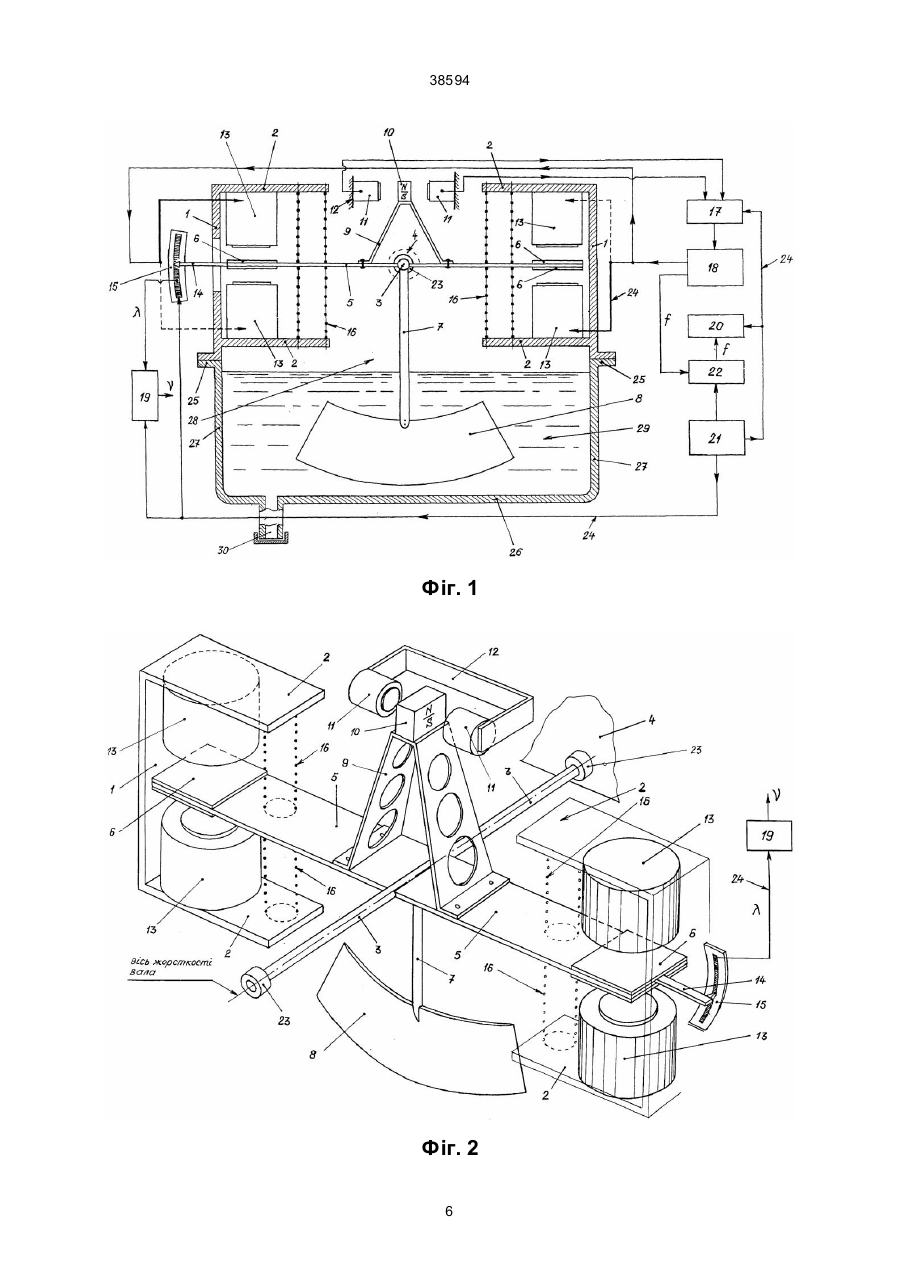
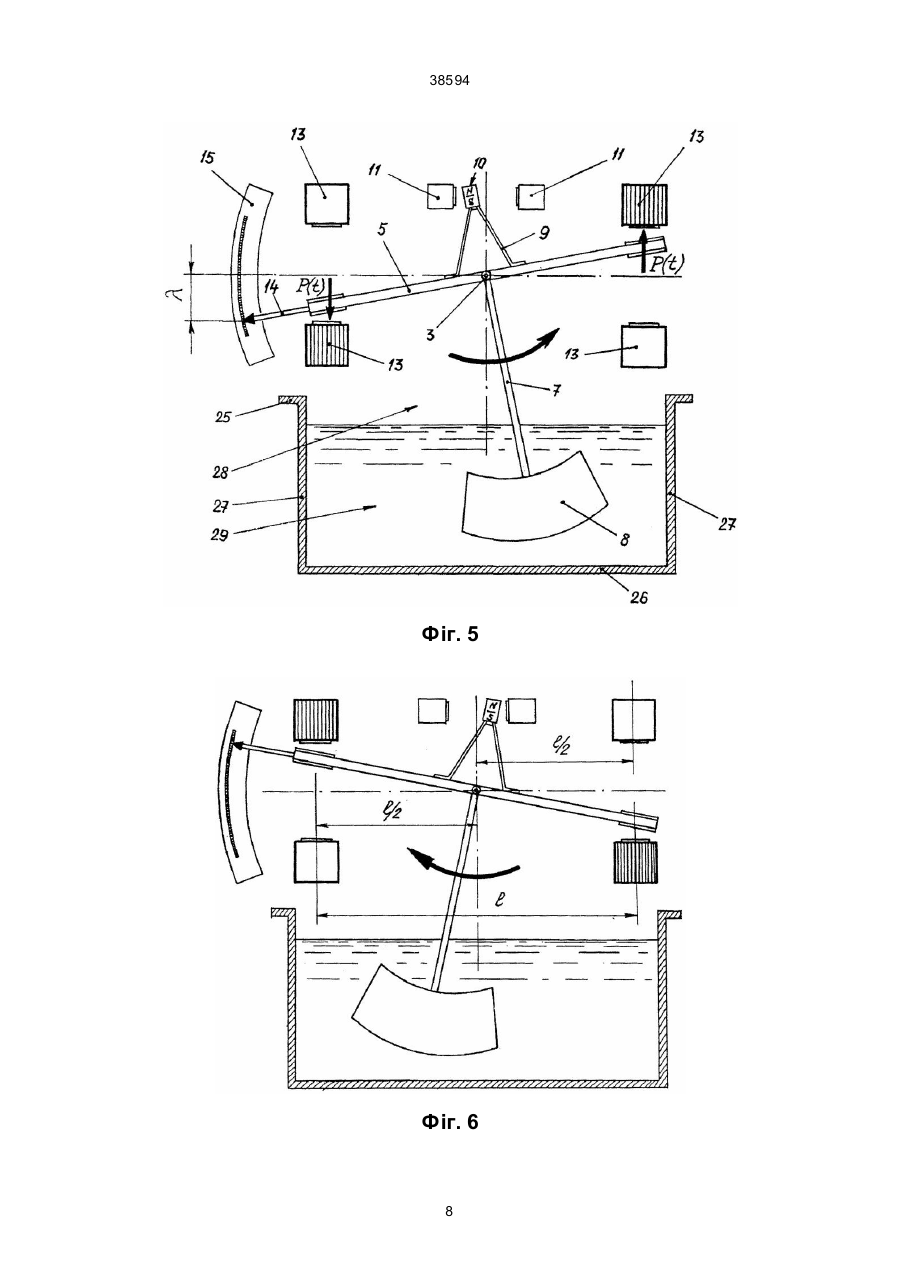
1. Пристрій для вимірювання в'язкості рідких речовин, який містить електромагнітний збудник коливань досліджуваного матеріалу, ємкість з перпендикулярними основі боковими стінками і вторинний перетворювач в'язкості, який відрізняється тим, що він додатково містить корпус з опорними площадками, вал, закріплений на корпусі в двох точках опори, посередині якого перпендикулярно осі жорсткості закріплена пластина з феромагнітними накладками, кронштейн, закріплений на валу, зонд, закріплений на кронштейні перпендикулярно осі жорсткості вала, балку, закріплену на пластині вздовж осі кронштейна, постійний магніт, закріплений на кінці зазначеної балки, індукційні датчики, пружини, підсилювач збудження низької частоти, фазоінвертор, аналого-цифровий перетворювач, датчик лінійних переміщень зонда, виконаний у вигляді реостата, зв'язаний контактом з пластиною, блок обробки інформації та джерело живлення, при цьому електромагнітний збудник коливань дослідного матеріалу виконаний у вигляді не менше ніж двох пар електромагнітів, електромагніти встановлено симетрично феромагнітним накладкам, феромагнітні накладки розміщені симетрично відносно осі жорсткості вала та в зазорі між електромагнітами, а індукційні датчики встановлено симетрично постійному магніту. A (54) ПРИСТРІЙ ДЛЯ ВИМІРЮВАННЯ В'ЯЗКОСТІ РІДКИХ РЕЧОВИН 38594 контролю через недостатню точність вимірювання. Це пояснюється тим, що система збудження маятникових коливань збуджує зонд з частотою змушених (які задаються) коливань. Крім того, відомий механотронний прилад може бути використаний тільки для визначення в'язкості рідких матеріалів. Найбільш близьким технічним рішенням, обраним як прототип, є пристрій для вимірювання в'язкості рідких речовин, який містить електромагнітний збудник коливань досліджуваного матеріалу, ємкість з перпендикулярними основі боковими стінками і вторинний перетворювач в'язкості [2]. У вказаному пристрої за допомогою датчика отримують сигнал, пропорційний частоті заданих коливань, і розрахунковим методом за формулою для лінійної коливальної системи і тарувальними кривими визначають в'язкість досліджуваного матеріалу. Недоліком вказаного пристрою для вимірювання в'язкості рідких речовин, який обрано як прототип, є низька точність визначення показників в'язкості матеріалу, що досліджується, яка обумовлена тим, що збуджуються змушені коливання із заданою частотою, а не власні коливання, частота яких прямо, а не посередньо, як у прототипі, залежить від в'язкості матеріалу, що досліджується, якщо останній включений у динамічну коливальну систему. Крім того, функціональні можливості прототипу не дозволяють використовувати його для розширення асортименту матеріалів, що досліджуються, наприклад, для визначення сипучості дисперсних порошкоподібних матеріалів. Технічною задачею, яка розв'язується цим винаходом, є підвищення точності вимірювань і поширення асортименту матеріалів, що досліджуються. Суть винаходу у пристрої для вимірювання в'язкості рідких речовин, який містить електромагнітний збудник коливань досліджуваного матеріалу, ємкість з перпендикулярними основі боковими стінками і вторинний перетворювач в'язкості, полягає в тому, що рішенням технічної задачі є додаткове оснащення корпуса опорними площадками, виконання валу закріпленим на корпусі в двох точках опори, закріплення посередині вала перпендикулярно його осі жорсткості пластини з феромагнітними накладками, закріплення кронштейна на валу, закріплення зонда на кронштейні перпендикулярно осі жорсткості вала, закріплення балки на пластині вздовж осі кронштейна, закріплення постійного магніту на кінці зазначеної балки, додаткове оснащення індукційними датчиками, пружинами, підсилювачем збудження низької частоти, фазоінвертором, аналого-цифровим перетворювачем, датчиком лінійних переміщень зонда, виконаного у вигляді реостата, зв'язаного контактом з пластиною, блоком обробки інформації та джерелом живлення, виконання електромагнітного збудника коливань дослідного матеріалу у вигляді не менше ніж двох пар електромагнітів, встановлення електромагнітів симетрично феромагнітним накладкам, розміщення феромагнітних накладок симетрично відносно осі жорсткості вала та в зазорі між електромагнітами, встановлення індукційних датчиків симетрично постійному магніту, виконання зонда у вигляді частки кільця, виконання торців зонда загостреними, встановлення пружин симетрично між собою і віссю жорсткості вала та з можливістю контактування з опорними площадками корпуса та пластиною, виконання вторинного перетворювача в'язкості у вигляді реєстратора частоти коливань, забезпечення зв'язку входу реєстратора частоти коливань з виходами джерела живлення та підсилювача низької частоти через фазоінвертор, а виходу - з входом блоку обробки інформації, забезпечення зв'язку входів підсилювача збудження низької частоти з індукційними датчиками та джерелом живлення, а виходів - з входами зазначених електромагнітів через фазоінвертор, забезпечення зв'язку виходів джерела живлення з входами аналого-цифрового перетворювача, датчика лінійних переміщень та блоку обробки інформації, забезпечення зв'язку виходу датчика лінійних переміщень з входом аналогоцифрового перетворювача, встановлення на кінцях вала підшипників кочення. Порівняльний аналіз технічного рішення з прототипом показує, що запропонований пристрій для вимірювання в'язкості рідких речовин відрізняється тим, що він додатково містить корпус з опорними площадками, вал, закріплений на корпусі в двох точках опори, посередині якого перпендикулярно осі жорсткості закріплена пластина з феромагнітними накладками, кронштейн, закріплений на валу, зонд, закріплений на кронштейні перпендикулярно осі жорсткості вала, балку, закріплену на пластині вздовж осі кронштейна, постійний магніт, закріплений на кінці зазначеної балки, індукційні датчики, пружини, підсилювач збудження низької частоти, фазоінвертор, аналого-цифровий перетворювач, датчик лінійних переміщень зонда, виконаний у вигляді реостата, зв'язаний контактом з пластиною, збудник коливань досліджуваного матеріалу виконаний у вигляді не менше ніж двох пар електромагнітів, електромагніти встановлено симетрично феромагнітним накладкам, феромагнітні накладки розміщені симетрично відносно осі жорсткості вала та в зазорі між електромагнітами, а індукційні датчики встановлено симетрично постійному магніту, зонд виконано у вигляді частки кільця, торці зонда виконано загостреними, пружини встановлено симетрично між собою і віссю жорсткості вала та з можливістю контактування з опорними площадками корпуса та пластиною, вторинний перетворювач в'язкості виконано у вигляді реєстратора частоти коливань, вхід реєстратора частоти коливань виконано зв'язаним з виходами джерела живлення та підсилювача низької частоти через фазоінвертор, вихід реєстратора частоти коливань виконано зв'язаним з входом блока обробки інформації, входи підсилювача збудження низької частоти виконано зв'язаними з індукційними датчиками та джерелом живлення, а виходи підсилювача збудження низької частоти виконано зв'язаними з входами зазначених електромагнітів через фазоінвертор, виходи джерела живлення виконано зв'язаними з входами аналогоцифрового перетворювача, датчика лінійних переміщень та блоку обробки інформації, вихід датчика лінійних переміщень виконано зв'язаним з входом аналого-цифрового перетворювача, а на кінцях вала встановлено підшипники кочення. 2 38594 Таким чином, даний пристрій вимірювання в'язкості рідких речовин відповідає критерію винаходу "новизна". Винахід пояснюється кресленнями, де на фіг. 1 представлено загальну схему пристрою для вимірювання в'язкості рідких речовин, на фіг. 2 наведено конструктивно-компонувальну схему динамічної системи пристрою, на фіг. 3 представлено загальну схему коливальної системи пристрою, на фіг. 4 зображено блок-схему пристрою, на фіг. 5 та фіг. 6 показано схеми збудження коливань датчика в'язкості за допомогою електромагнітів, відповідно у перший та другий півперіоди коливань, на фіг. 7 наведено графік залежності частоти авторезонансних коливань f динамічної системи від в'язкості v досліджуваного матеріалу та температури оточуючого середовища t, на фіг. 8 наведено графік залежності лінійних переміщень λ датчика динамічної системи від в'язкості ν досліджуваного матеріалу. Пристрій для вимірювання в'язкості рідких речовин містить корпус 1 з опорними площадками 2, вал 3, закріплений на корпусі 1 в дво х точках опори 4. Посередині вала 3 перпендикулярно його осі жорсткості (О.Ж.) закріплена пластина 5 з феромагнітними накладками 6. Плечі вищезгаданої пластини 5 відносно осі жорсткості вала 3 виконуються конструктивно рівними між собою. На валу 3 перпендикулярно площині пластини 5 закріплений кронштейн 7. На кінці кронштейна 7 закріплений зонд 8, який розміщено в площині, перпендикулярній осі жорсткості вала 3. Зонд 8 виконано у вигляді частки кільця, при цьому торці зонда 8 виконано загостреними. Осесиметрично кронштейна 7 (вздовж його поздовжньої осі) на валу 3 закріплено балку 9. На кінці балки 9 закріплено постійний магніт 10. Симетрично постійному магніту 10 розміщені індукційні датчики 11, які, як варіант конструктивного виконання, закріплені на опорі 12. На опорних площадках 2 корпуса 1 жорстко закріплено електромагнітний збудник коливань досліджуваного матеріалу, який виконано у вигляді електромагнітів 13. Електромагніти 13 розміщено осесиметрично осі жорсткості вала 3 та пластини 5. Електромагніти 13 об'єднані в блоки попарно і розміщені осесиметрично один відносно одного в блоці з осьовим зазором між осердями. При цьому краї пластини 5 виконано розміщеними симетрично відносно електромагнітів 13 в блоці. Електромагніти 13 встановлено симетрично феромагнітним накладкам 6, при цьому феромагнітні накладки 6 розміщені симетрично відносно осі жорсткості вала 3 та в зазорі між електромагнітами 13. Поздовжні осі електромагнітів 13 в блоці розміщено на відстані ℓ між собою та на відстані ℓ/2 відносно осі жорсткості вала 3. На одному з країв пластини 5 закріплено контакт 14, зв'язаний з датчиком лінійних переміщень 15 зонда 8, виконаний у вигляді реостата. Між опорними площадками 2 та пластиною 5 встановлено пружні елементи, виконані у вигляді пружин 16. Пружини 16 встановлено симетрично між собою і віссю жорсткості вала 3 та з можливістю контактування з опорними площадками 2 корпуса 1 та пластиною 5. Пристрій для вимірювання в'язкості рідких речовин додатково оснащений підсилювачем збудження низької частоти 17, фазоінвертором 18, аналого-цифровим пере творювачем 19, блоком обробки інформації 20 та джерелом живлення 21. Вторинний перетворювач в'язкості 22 виконано у вигляді реєстратора частоти коливань (позиція 22), наприклад, у вигляді електронно-обчислювального частотоміра, при цьому вхід реєстратора частоти коливань 22 (частотоміра) виконано зв'язаним з виходами джерела живлення 21 та підсилювача низької частоти 17 через фазоінвертор 18, а вихід - з входом блоку обробки інформації 20. Входи підсилювача збудження низької частоти 17 виконано зв'язаними з індукційними датчиками 11 та джерелом живлення 21, а виходи - з входами зазначених електромагнітів 13 через фазоінвертор 18. Виходи джерела живлення 21 виконано зв'язаними з входами аналого-цифрового перетворювача 19, датчика лінійних переміщень 15 та блоку обробки інформації 20, при цьому ви хід датчика лінійних переміщень 15 виконано зв'язаним з входом аналогоцифрового перетворювача 19. Для забезпечення повороту вала 3 відносно опор 4 на кінцях вала 3 встановлено підшипники кочення 23. Зв'язок між електричними приладами забезпечено за допомогою електричних кабелів 24. Корпус 1 з'єднано з ємкістю 25, яка виконана з перпендикулярними основі 26 боковими стінками 27. У порожнину 28 ємкості 25 заливається досліджуваний матеріал 29. Зливання досліджуваного матеріалу з ємкості 25 виконується за допомогою крану зливу 30 (як варіант конструктивного виконання). Пристрій для вимірювання в'язкості рідких речовин працює таким чином. Перед вмиканням приладу в ємкість 25 поміщають досліджуваний матеріал 29 (див. фіг. 1), наприклад, рідку речовину (як рідка речовина може бути нафта, бензин, гас, рідкі фарби, мастила та інші матеріали, які мають можливість коливатися) у кількості, щоб зонд 8 був закритий речовиною повністю, але не менше, ніж на половину довжини кронштейна 7. Вмикається прилад, подається напруга з джерела живлення 21 по електричних кабелях 24 на входи вторинного перетворювача в'язкості (реєстратора частоти коливань) 22, аналого-цифрового перетворювача 19, датчика лінійних переміщень 15, підсилювача збудження низької частоти 17 та на блок обробки інформації 20 (див. фіг. 4). При цьому між індукційними датчиками 11 та постійним магнітом 10 є контакт через вплив магнітного поля (N/S) постійного магніту 10 на обмотки котушки індукційного датчика 11. Зазначене магнітне поле (N/S) виробляє в котушці індукційного датчика 11 сигнал у вигляді електрорушійної сили індукції (е.р.с.). Зазначений сигнал по електричним ланцюгам (кабелям 24) подається на входи підсилювача збудження низької частоти 17. У підсилювачі збудження низької частоти 17 сигнал у вигляді електрорушійної сили індукції (е.р.с.) підсилюється і подається на входи фазоінвертора 18. Проходячи через фазоінвертор 18, підсилений сигнал розподіляється на два канали і подається на діагонально протилежні електромагніти 13 (див. фіг. 1, фіг. 5-6 ), які зібрано в блоки попарно і закріплено жорстко на корпусі 1. У перший півперіод коливань сигнал з підсилювача збудження низької частоти 17 буде надходити до діагонально протилежних електромагнітів 13, наприклад, як наведе 3 38594 но на фіг. 5. При цьому в електромагніті 13 виникає змінне (за півперіодами коливань) магнітне поле (N/S), енергія P(t) якого через феромагнітні накладки 6, що є жорстко закріпленими на краях пластини 5 (пластина 5 при цьому закріплена жорстко на валу 3 перпендикулярно його осі жорсткості), впливає на зазначену пластину 5 і, як наслідок, на вал 3, викликаючи його повертання відносно поздовжньої осі у підшипниках кочення 23 (див. фіг. 5). Змінне відхилення пластини 5 з зондом 8, що закріплений на валу 3 за допомогою кронштейна 7, призводить до виникнення коливань зазначеного зонда 8 відносно осі жорсткості вала 3 з авторезонансною частотою. На підставі того, що плечі пластини 5 відносно осі жорсткості вала 3 є рівними між собою, а електромагніти 13 мають однакові характеристики, то сили діяння P(t) на кожне з плеч пластини 5 будуть також однакові, і вони будуть збуджувати тільки крутильні коливання вала 3 з зондом 8. При повертанні вала 3 буде відповідно переміщуватись і зонд 8, який жорстко закріплено до валу 3 за допомогою кронштейна 7 (зонд 8 з кронштейном 7 буде переміщуватись в площині, перпендикулярній поздовжній осі вала 3). Разом з повертанням вала 3 будуть відхилятися від горизонталі (що є статичним положенням пластини 5) краї зазначеної пластини 5, стискаючи відповідні діагональне протилежні пружні елементи (пружини 16). При стисканні пружини 16 будуть накопичувати енергію протидії магнітному полю (N/S) від електромагнітів 13. У процесі відхилення країв пластини 5 від горизонтального положення контакт 14 датчика лінійних переміщень 15 буде ковзати по обмотках датчика лінійних переміщень 15 (який конструктивно виконано у вигляді реостата) і змінювати величину струму від джерела живлення 21 на величину λ, пропорційну куту відхилення країв пластини 5 (див. фіг. 1, фіг. 5, фіг. 6). Визначений сигнал λ з датчика лінійних переміщень 15 буде надходити до аналого-цифрового перетворювача 19. У цей же час (у термін першого півперіоду коливань) сигнал з фазоінвертора 18 буде по другому каналу подаватися на входи вторинного перетворювача в'язкості 22 (який виконано у вигляді регістратора частоти коливань, наприклад, частотоміра 22, вхід якого виконано зв'язаним з виходами електромагнітів 13), формуючи базовий сигнал частоти коливань f. З частотоміра 22 базовий сигнал частоти коливань f подається також і на блок обробки інформації 20. Як вже було зазначено вище, при дії магнітного поля (N/S) від електромагнітів 13 на пластину 5 буде відбуватися як відхилення від горизонталі пластини 5, так і від вертикалі зонда 8. У положенні пластини 5 і зонда 8, коли сила P(t) дії магнітного поля (N/S) електромагніта 13 на зазначену пластину 5 стане дорівнювати силі стискання пружин 16, повертання вала 3 із закріпленими на ньому пластиною 5, зондом 8 (на кронштейні 7) та постійного магніту 10 (закріпленого на балці 9) припиниться. У цей момент зникне електрорушійна сила індукції (е.р.с.) в індукційному датчику 11, який працював у перший півперіод коливань (наприклад, лівий, згідно зі схемою на фіг. 5). При цьому зникне і сигнал, який надходить до підсилювача збудження низької частоти 17, а також підсилений сигнал, який надходив на електромагніти 13 через фазоінвертор 18. Маг нітне поле (N/S) від задіяних у перший півперіод коливань електромагнітів 13 зникне, і під дією пружин 16 (які були задіяні у перший півперіод коливань) вал 3 буде повертатися в обернену сторону. На цьому етап першого півперіоду коливань закінчується. При повертанні вала 3 в напрямі статичного положення постійний магніт 10 буде впливати вже на інший індукційний датчик 11 (див. фіг. 6), викликаючи в зазначеному індукційному датчику 11 (наприклад, у правому, згідно зі схемою на фіг. 6) сигнал у вигляді електрорушійної сили індукції (е.р.с.), але іншого знаку, ніж у перший півперіод коливань. З індукційного датчика 11 сигнал у вигляді електрорушійної сили індукції (е.р.с.) буде надходити до підсилювача збудження низької частоти 17, а з нього, вже підсилений, через фазоінвертор 18 на інші (відповідно до першого півперіоду коливань) електромагніти 13 в блоках. Проходячи через фазоінвертор 18, підсилений сигнал розподіляється на два канали і подається на діагонально протилежні електромагніти 13 (див. фіг. 1, фіг. 6), які зібрано в блоки попарно і закріплено жорстко на корпусі 1. У другий півперіод коливань сигнал з підсилювача збудження низької частоти 17 буде надходити до діагонально протилежних електромагнітів 13, наприклад, як наведено на фіг. 6. При цьому в електромагнітах 13 знов виникає змінне (за півперіодами коливань) магнітне поле (N/S), енергія P(t) якого через феромагнітні накладки 6 буде впливати на зазначену пластину 5 і, як наслідок, на вал 3, викликаючи його повертання відносно поздовжньої осі у підшипниках кочення 23 (див. фіг. 2, фіг. 3, фіг. 5-6) в іншу сторону щодо першого півперіоду коливань. При повертанні вала 3 в іншу сторону буде відповідно переміщуватись і зонд 8, який жорстко закріплено на валу 3 за допомогою кронштейна 7. Разом з повертанням вала 3 будуть відхилятися від горизонталі (що є статичним положенням пластини 5) краї зазначеної пластини 5, стискаючи відповідні діагонально протилежні пружні елементи (пружини 16) (інші - щодо першого півперіоду коливань). При стисканні пружини 16 будуть накопичувати енергію протидії магнітному полю (N/S) від електромагнітів 13. У процесі відхилення країв пластини 5 від горизонтального положення контакт 14 датчика лінійних переміщень 15 буде ковзати по обмотках датчика лінійних переміщень 15 (який конструктивно виконано у вигляді реостата) і змінювати величину струму від джерела живлення 21 на величину λ, пропорційну куту відхилення країв пластини 5 (див. фіг. 5 або фіг. 6). Визначений сигнал λ з датчика лінійних переміщень 15 буде надходити до аналого-цифрового перетворювача 19. У цей же час (у термін другого півперіоду коливань) сигнал з фазоінвертора 18 буде по другому каналу подаватися на входи вторинного перетворювача в'язкості 22 (який виконано у вигляді регістратора частоти коливань, наприклад, частотоміра 22), формуючи базовий сигнал частоти коливань f. У другий півперіод коливань з частотоміра 22 базовий сигнал частоти коливань f аналогічним чином подається також і на блок обробки інформації 20. У положенні пластини 5 і зонда 8, коли сила P(t) дії магнітного поля (N/S) електромагніта 13 на зазначену пластину 5 стане дорівнюва 4 38594 ти силі стискання пружин 16, повертання вала 3 із закріпленими на ньому пластиною 5, зондом 8 (на кронштейні 7) та постійного магніту 10 (закріпленого на балці 9) припиниться. У цей момент зникне електрорушійна сила індукції (е.р.с.) в індукційному датчику 11, який працював у др угий півперіод коливань (наприклад, правий, згідно зі схемою на фіг. 6). При цьому ж зникне і сигнал, який надходить до підсилювача збудження низької частоти 17, а також підсилений сигнал, який надходив на електромагніти 13 через фазоінвертор 18. Магнітне поле (N/S) від задіяних у др угий півперіод коливань електромагнітів 13 зникне і під дією пружин 16 (які були задіяні у другий півперіод коливань), вал 3 буде повертатися в обернену сторону. На цьому етап другого півперіоду коливань закінчується. Але процес коливань не закінчується. Він буде повторюватись невизначено довгий час і буде залежати тільки від впливу величини в'язкості v досліджуваного матеріалу 29 на зонд 8. Чим більшою є величина в'язкості v, тим менше буде частота f коливань зонда 8. Знаючи виміряні раніше еталонні частоти коливань f зонда 8 у ємкості 25 з досліджуваним матеріалом, показники в'язкості якого відомі (отримані при контрольному вимірюванні за допомогою методів контролю, описаних, наприклад, в [3]), отримують за номограмою залежності частоти авторезонансних коливань f системи "вал-зонддосліджуваний матеріал" від в'язкості v досліджуваного матеріалу 29 величину в'язкості v досліджуваного матеріалу 29 (див. номограму залежності f=ƒ(v, t) на фіг. 7). Наприклад, при контрольному вимірюванні в'язкості v досліджуваного матеріалу була отримана частота авторезонансних коливань f1. Згідно з номограмою, на осі f знаходять величину f1 , проводять перпендикуляр до сімейства кривих t (на фіг. 7 - зазначено t1, t2, t3 та t4), відповідно до температури t3 (як приклад), переходять паралельно базовій осі до графіка зміни в'язкості v і, опускаючи перпендикуляр з точки перетину графіка на вісь v, отримують величину фактичної в'язкості v1 досліджуваного матеріалу 29. За величиною кутових переміщень пластини 5 відносно статичного положення, за даними сигналу λ, отримують додатково величину фактичної в'язкості v1 досліджуваного матеріалу 29 (див. номограму залежності λ=ƒ(v) на фіг. 8). На цьому дослідну роботу щодо отримання величини фактичної в'язкості v досліджуваного матеріалу 29 закінчують. Після проведених досліджень зливання дослідного матеріалу 29 з ємності 25 робиться крізь кран зливу 30. Підвищення ефективності використання даного пристрою для вимірювання в'язкості рідких речовин порівняно з прототипом, досягається за рахунок того, що принцип дії пристрою заснований на створенні самозбуджуючого контуру, який складається з вала із зондом, пластини, індукційних датчиків та підсилювача збудження низької частоти, при цьому вал із зондом, який є зануреним у досліджуваний матеріал, в цьому контурі є частотно-вибірковою ланкою, яка дозволяє збуджувати крутильні коливання динамічної системи тільки з авторезонансною частотою. Використання у пристрої схеми самозбуджуючого контур у, а в схемі високочутливого індукційного датчика велосиметричного типу, забезпечує значне підвищення точності вимірювання і дозволяє розширити коло досліджуваних матеріалів. Роздільне і ізольоване розташування силових електромагнітів, індукційних датчиків (за межами магнітного поля, що наводиться електромагнітами), винесення за допомогою балки постійного магніту із зони дії магнітного поля, що наводиться електромагнітами, підвищує чутливість пристрою. Запропонований пристрій для вимірювання в'язкості рідких речовин може бути використаний також і для визначення сипкості дисперсних порошкових матеріалів. Джерела інформації. 1. Авторське свідоцтво СРСР № 238875, МПК G01N11/16, 1966 р. - аналог. 2. Авторське свідоцтво СРСР № 685957, МПК G01N11/16, 1977 р. - аналог. 3. Авторське свідоцтво СРСР № 775667, МПК G01N11/16, 1977 р. - прототип. 5 38594 Фіг. 1 Фіг. 2 6 38594 Фіг. 3 Фіг. 4 7 38594 Фіг. 5 Фіг. 6 8 38594 Фіг. 7 9 38594 Фіг. 8 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 10
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of viscosity of liquid substances
Автори англійськоюNykyforuk Bohdan Vasyliovych, Yershova Emma Oleksandrivna
Назва патенту російськоюУстройство для измерения вязкости жидких веществ
Автори російськоюНикифорук Богдан Васильевич, Ершова Эмма Александровна
МПК / Мітки
МПК: G01N 11/16, G01N 11/10
Мітки: пристрій, рідких, в'язкості, речовин, вимірювання
Код посилання
<a href="https://ua.patents.su/10-38594-pristrijj-dlya-vimiryuvannya-vyazkosti-ridkikh-rechovin.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання в’язкості рідких речовин</a>
Спосіб визначення в’язкості рідких речовин
Номер патенту: 38411
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16, G01N 11/10
Мітки: визначення, рідких, в'язкості, речовин, спосіб
Текст:
...досліджуваного матеріалу (рідкої речовини) 22 використовують метод пропускання холодної речовини, наприклад, газу, азоту або води (позиція 31), крізь порожнину 29 між корпусом 27 ємності 21 та додатковою стінкою 28. Водночас з приведенням досліджуваного матеріалу (рідкої речовини) 22 до відповідності стандартній температурі 20°С, вібраційний віскозиметр установлюють на кришці 23, що закриває ємність 21 з досліджуваним матеріалом (рідкою...
Ультразвуковий фазовий спосіб визначення витрати потоків рідких та газоподібних речовин у трубопроводі та пристрій для його здійснення
Номер патенту: 34512
Опубліковано: 15.03.2001
Автори: Іващенко Григорій Олексійович, Скрипник Юрій Олексійович, Здоренко Валерій Георгійович
Мітки: фазовий, потоків, ультразвуковий, здійснення, пристрій, рідких, витрати, речовин, трубопроводі, визначення, газоподібних, спосіб
Текст:
...коливань до отpимання piвностi фа зових зсувiв, що поpiвнюються, i вимipюють значення частоти модулюючих електpичних коливань, за яким судять пpо витpату, згiдно з винаходом додатково визначають суму фа зових зсувiв, що поpiвнюються, i змiнюють частоту ви сокочастотних електpичнихх коливань до досягнення фазовими зсувами, що поpiвнюються, нульови х значень, а витpату Q визначають за наступ ною фоpмулою Q= k pD 3 F 2n sin q де k – коефi...
Пристрій для вимірювання електропровідності рідких середовищ
Номер патенту: 33026
Опубліковано: 15.02.2001
Автори: Галкін Лев Олексійович, Середа Сергій Васильович
МПК: G01R 27/22, G01N 27/02, G01R 27/02
Мітки: середовищ, електропровідності, вимірювання, рідких, пристрій
Текст:
...термочутливий елемент якого приведений в тепловий контакт з рідким середовищем в перетворчій комірці, причому термокомпенсатор з термочутливкм елементом та перетворча комірка з еталонним резистором складають вимірювальну мостову схему, до вимірювальної діагоналі якої підключені входи підсилювача, що виконаний по балансній (двовхідній) схемі, а в діагональ живлення увімкнений генератор гармонічної напруги стабілізований по...
Пристрій для термічного розкладення шкідливих рідких речовин
Номер патенту: 5694
Опубліковано: 28.12.1994
Автор: ФРАНЦ ХОВОРКА
МПК: F23G 7/04
Мітки: пристрій, рідких, термічного, речовин, шкідливих, розкладення
Формула / Реферат:
1. Устройство для термического разложения вредных жидких веществ, содержащее цилиндрическую топочную камеру с впускным отверстием, горелкой и задерживающим устройством, выполненным в виде кольца с центральным отверстием, диаметр которого меньше диаметра топочной камеры, и оборудованным направленными вниз под углом соплами, а также расположенную над топочной камерой камеру дожига, отличающееся тем, что впускное отверстие расположено над...
Спосіб та пристрій для оперативного визначення параметрів рідких та сипучих речовин
Номер патенту: 23244
Опубліковано: 19.05.1998
Автори: Чичикало Ніна Іванівна, Кожанов Юрій Григорович, Балтер Борис Зіновийович
МПК: G01N 9/00
Мітки: спосіб, пристрій, оперативного, визначення, рідких, сипучих, параметрів, речовин
Формула / Реферат:
1. Способ оперативного определения параметров жидких и сыпучих веществ по характеру изменения положения равновесия механической системы под действием приложенных к ней моментов измеряемых и уравновешивающих их сил, отличающийся тем, что в качестве уравновешивающих используют моменты массовых сил.2, Устройство для оперативного определения параметров жидких и сыпучих веществ по п. 1, содержащее двуплечий рычаг, на одном плече которого с...
Попередній патент: Тренажер
Наступний патент: Пристрій для трафаретного друку
Випадковий патент: Упаковка для яєць