Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні
Номер патенту: 58102
Опубліковано: 25.03.2011
Автори: Водчис Олександр Григорович, Комаров Володимир Олександрович, Ляшенко Ігор Олександрович, Бацман Богдан Сергійович, Терлецький Ігор Іванович, Безкровний Дмитро Володимирович, Асланян Альберт Едуардович, Манелюк Олександр Григорович, Петєрін Микита Костянтинович, Попов Іван Анатольович, Башинський Володимир Георгійович, Головещенко Ігор Васильович, Балакін Сергій Геннадійович, Зарицький Олег Іванович, Кириленко Володимир Анатолійович, Лазуренко Олександр Вікторович, Польський Павло Вікторович, Ткаченко Володимир Анатолійович, Кузнецов Владлен Олександрович, Припута Іван Петрович, Добровольський Юзеф Броніславович, Стеценко Олексій Юрійович, Хижняк Андрій Сергійович, Гордієвський Олексій Тихонович, Зірка Андрій Леонідович, Галушка Володимир Іванович, Сендецький Микола Миколайович, Расстригін Олександр Олексійович, Столінець Сергій Леонідович
Формула / Реферат
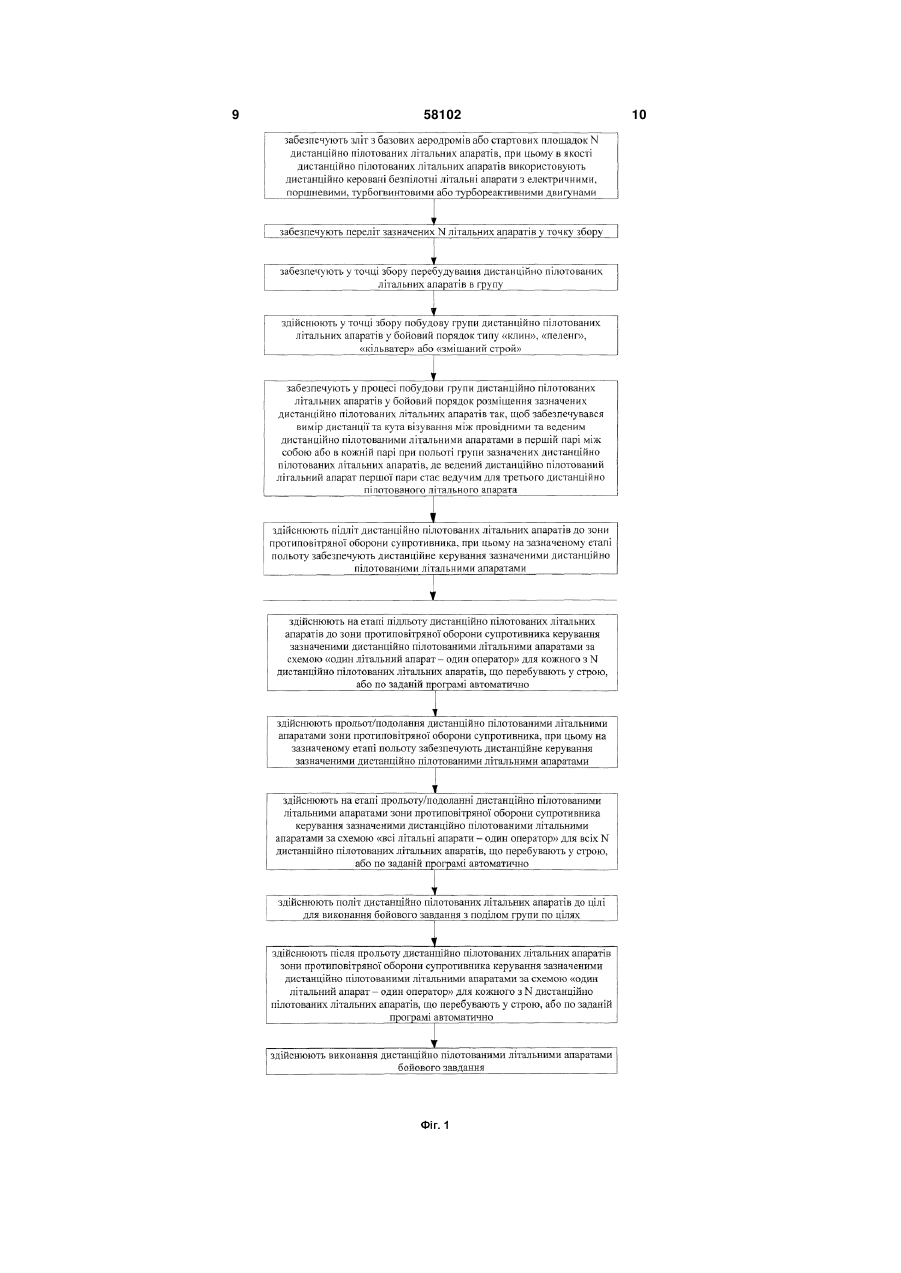
1. Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні, при якому забезпечують зліт з базових аеродромів або стартових площадок N дистанційно пілотованих літальних апаратів, забезпечують переліт зазначених N літальних апаратів у точку збору, забезпечують у точці збору перебудування в групу, з наступним підльотом до зони протиповітряної оборони супротивника, прольотом/подоланням зони протиповітряної оборони супротивника та польотом до цілі для виконання бойового завдання з поділом групи по цілях, при цьому на всіх зазначених етапах польоту забезпечують дистанційне керування зазначеними дистанційно пілотованими літальними апаратами, який відрізняється тим, що у точці збору здійснюють побудову групи дистанційно пілотованих літальних апаратів у бойовий порядок типу "клин", "пеленг", "кільватер" або "змішаний строй", а у процесі побудови групи дистанційно пілотованих літальних апаратів у бойовий порядок забезпечують розміщення зазначених дистанційно пілотованих літальних апаратів так, щоб забезпечувався вимір дистанції та кута візування між провідними та веденим дистанційно пілотованими літальними апаратами в першій парі між собою або в кожній парі при польоті групи зазначених дистанційно пілотованих літальних апаратів, де ведений дистанційно пілотований літальний апарат першої пари стає ведучим для третього дистанційно пілотованого літального апарата, при цьому на етапі підльоту до зони протиповітряної оборони супротивника керування дистанційно пілотованими літальними апаратами здійснюють за схемою "один літальний апарат - один оператор" для кожного з N дистанційно пілотованих літальних апаратів, що перебувають у строю, або по заданій програмі автоматично, на етапі прольоту/подоланні зони протиповітряної оборони супротивника керування дистанційно пілотованими літальними апаратами здійснюють за схемою "всі літальні апарати - один оператор" для всіх N дистанційно пілотованих літальних апаратів, що перебувають у строю, або по заданій програмі автоматично, а після прольоту зони протиповітряної оборони супротивника керування дистанційно пілотованими літальними апаратами здійснюють за схемою "один літальний апарат - один оператор" для кожного з N дистанційно пілотованих літальних апаратів, що перебувають у строю, або по заданій програмі автоматично.
2. Спосіб за п. 1, який відрізняється тим, що як дистанційно пілотовані літальні апарати використовують дистанційно керовані безпілотні літальні апарати з електричними, поршневими, турбогвинтовими або турбореактивними двигунами.
Текст
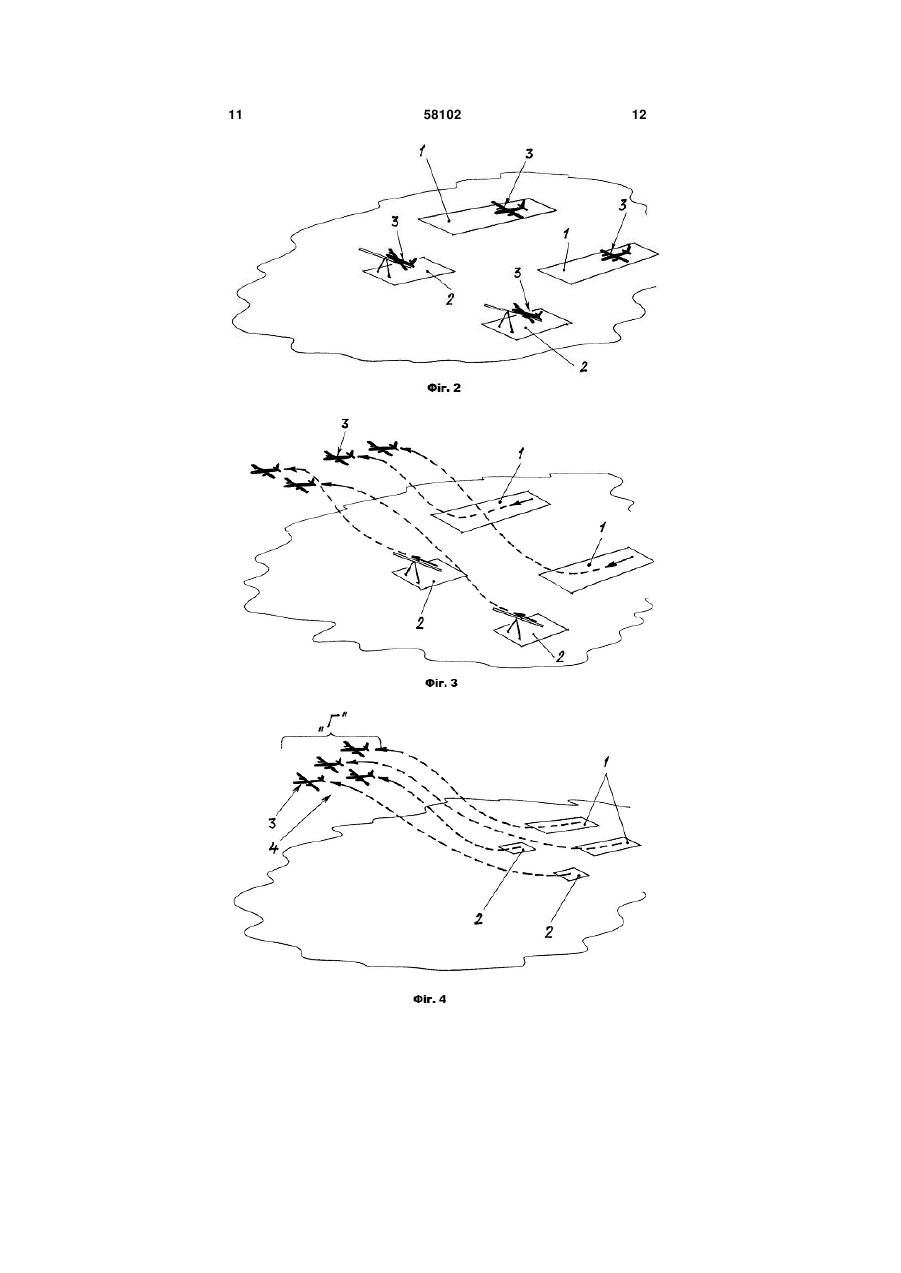
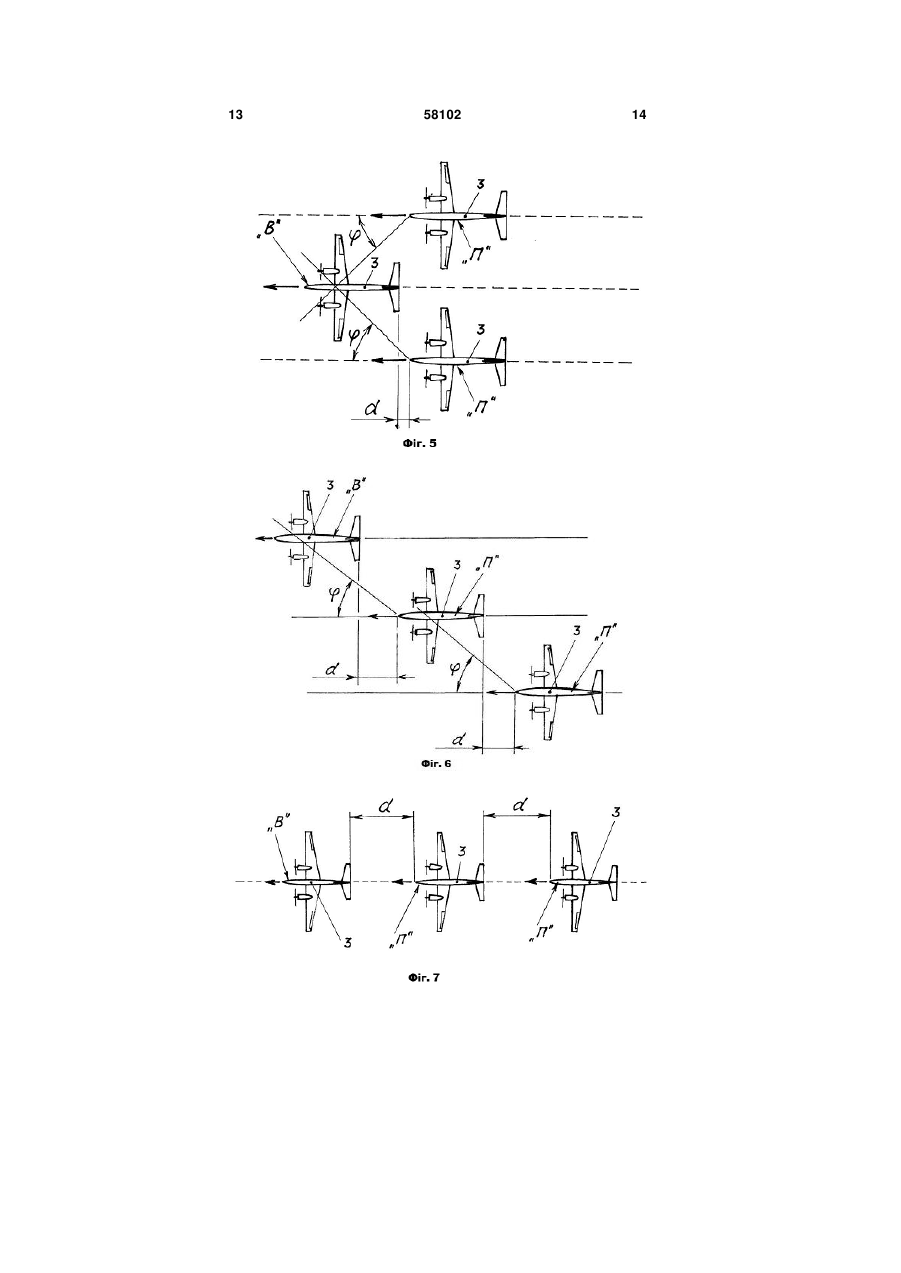
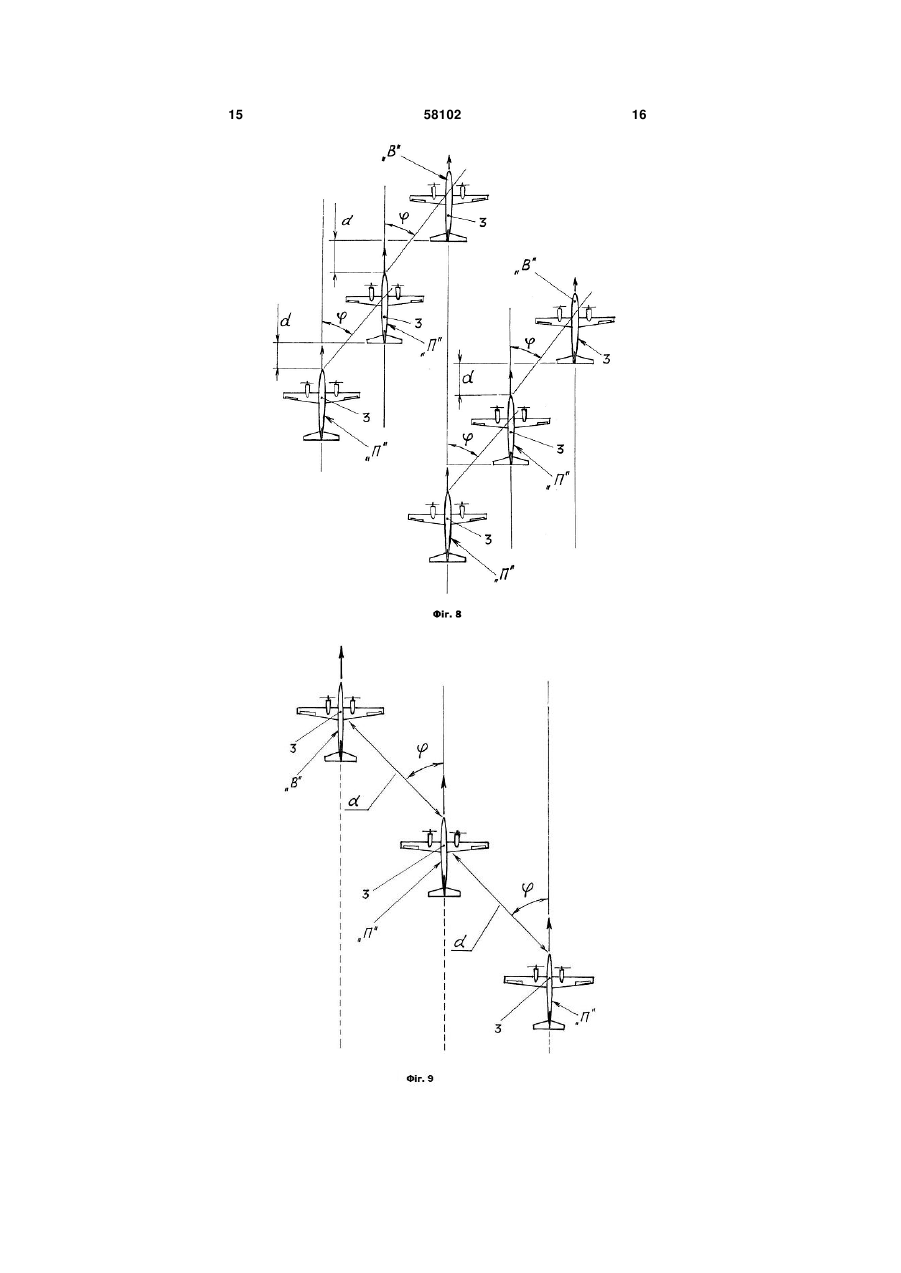
1. Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні, при якому забезпечують зліт з базових аеродромів або стартових площадок N дистанційно пілотованих літальних апаратів, забезпечують переліт зазначених N літальних апаратів у точку збору, забезпечують у точці збору перебудування в групу, з наступним підльотом до зони протиповітряної оборони супротивника, прольотом/подоланням зони протиповітряної оборони супротивника та польотом до цілі для виконання бойового завдання з поділом групи по цілях, при цьому на всіх зазначених етапах польоту забезпе 2 (19) 1 3 Корисна модель відноситься до галузі авіації, зокрема, до способів виконання польотів літальних апаратів в строю, а саме, до способів розміщення літальних апаратів в строю при подоланні зони протиповітряної оборони супротивника і керування ними при використанні в групі на різних етапах польоту відносно зони протиповітряної оборони супротивника. Пілотовані літальні апарати частіше усього використовуються не поодинці, а групами, при цьому забезпечується масований удар авіації, який є найбільш ефективним. Важливість задач, що виконуються, високі вимоги до багатоцільового дистанційно пілотованого літального апарата (ДПЛА), велика потреба в них ставлять на перше місце проблему підвищення ефективності керування груповим польотом ДПЛА, тобто алгоритмічного забезпечення керуванням польотом ДПЛА при їх груповому використанні [1]. При цьому необхідно вирішити широке коло задач в умовах різноманітних обмежень і спеціальних вимог, а також пов'язаних з аналізом поведінки того чи іншого комплексу для окремих прикладних задач. В цих умовах при синтезі керування доводиться розглядати та оцінювати значну кількість можливих варіантів організації структури, загального і часткових алгоритмів керування і його підсистем. Сучасні обчислювальні засоби, розвинуте спеціалізоване програмне забезпечення та накопичений досвід розробок дозволяють вирішити задачу побудови субоптимального алгоритму керування з метою найбільш ефективного вирішення задач між літакової навігації, автоматизації керування польотом при витримуванні місця, маневрування в групі, виключення зіткнення при виникненні нештатних ситуацій та інше. Вихідними даними для побудови алгоритму, реалізованого на борту ДПЛА, є інформація вимірюючого заданий кут візування ведучого ДПЛА і дальність від веденого ДПЛА до ведучого. Відомий спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні, при якому підготовляють літальні апарати, забезпечують зліт з базових аеродромів або стартових площадок N дистанційно пілотованих літальних апаратів, забезпечують переліт зазначених N літальних апаратів у точку збору, забезпечують у точці збору перебудування в групу з наступним виконанням етапів, згідно яких здійснюють підліт до зони протиповітряної оборони супротивника, проліт/подолання зони протиповітряної оборони супротивника та політ до цілі, при цьому забезпечують при підльоті, прольоті/подоланні зони протиповітряної оборони супротивника та польоті дистанційне керування зазначеними дистанційно пілотованими літальними апаратами, причому на етапі польоту до цілі для виконання бойового завдання здійснюють поділ групи по цілях [2]. До недоліків відомого технічного рішення відноситься те, що не забезпечується стійкість строю літальних апаратів більше чотирьох зв'язків (при п'яти літальних апаратів у строю), що приводить 58102 4 до розхитування строю. Також спосіб характеризується низькою ефективністю витримування строю при шести та більше літальних апаратів у групі. Найбільш близьким технічним рішенням, як по суті, так і за задачами, що вирішуються, яке обрано за найближчий аналог (прототип), є спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні, при якому забезпечують зліт з базових аеродромів або стартових площадок N дистанційно пілотованих літальних апаратів, забезпечують переліт зазначених N літальних апаратів у точку збору, забезпечують у точці збору перебудування в групу, з наступним підльотом до зони протиповітряної оборони супротивника, прольотом/подоланням зони протиповітряної оборони супротивника та польотом до цілі для виконання бойового завдання з поділом групи по цілях, при цьому на всіх зазначених етапах польоту забезпечують дистанційне керування зазначеними дистанційно пілотованими літальними апаратами [3]. До недоліків способу керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні, який обрано за найближчий аналог (прототип), відноситься те, що не забезпечується стійкість строю літальних апаратів кількістю більше чотирьох зв'язків (при п'яти літальних апаратів у ладі), що приводить до розхитування строю в польоті. Також спосіб характеризується низькою ефективністю витримування строю при шести чи більше літальних апаратів у групі. В основу корисної моделі покладено задачу шляхом виміру дистанції й кута візування між провідними і веденим літальними апаратами в парі між собою або в кожній парі при польоті групи літальних апаратів забезпечити надійне керування ними для найбільш ефективного вирішення завдань міжлітакової навігації, автоматизацію керування польотом при витримуванні місця, маневрування в групі, виключення зіткнення літаків при виникненні нештатних ситуацій. Суть корисної моделі в способі керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні, при якому забезпечують зліт з базових аеродромів або стартових площадок N дистанційно пілотованих літальних апаратів, забезпечують переліт зазначених N літальних апаратів у точку збору, забезпечують у точці збору перебудування в групу, з наступним підльотом до зони протиповітряної оборони супротивника, прольотом/подоланням зони протиповітряної оборони супротивника та польотом до цілі для виконання бойового завдання з поділом групи по цілях, при цьому на всіх зазначених етапах польоту забезпечують дистанційне керування зазначеними дистанційно пілотованими літальними апаратами, полягає в тому, що у точці збору здійснюють побудову групи дистанційно пілотованих літальних апаратів у бойовий порядок типу «клин», «пеленг», «кільватер» або «змішаний строй», а у процесі побудови групи дистанційно пілотованих літальних апаратів у бойовий порядок забезпечують розміщення зазначених дистанційно пілотова 5 58102 6 них літальних апаратів так, щоб забезпечувався літальних апаратів, що перебувають у строю, або вимір дистанції та кута візування між провідними по заданій програмі автоматично, а після прольоту та веденим дистанційно пілотованими літальними зони протиповітряної оборони супротивника керуапаратами в першій парі між собою або в кожній вання дистанційно пілотованими літальними апапарі при польоті групи зазначених дистанційно ратами здійснюють за схемою «один літальний пілотованих літальних апаратів, де ведений дисапарат - один оператор» для кожного з N дистантанційно пілотований літальний апарат першої ційно пілотованих літальних апаратів, що перебупари стає ведучим для третього дистанційно піловають у строю, або по заданій програмі автоматитованого літального апарата. Суть корисної моделі чно, причому як дистанційно пілотовані літальні полягає і в тому, що на етапі підльоту до зони проапарати використовують дистанційно керовані типовітряної оборони супротивника керування дибезпілотні літальні апарати з електричними, поршстанційно пілотованими літальними апаратами невими, турбогвинтовими або турбореактивними здійснюють за схемою «один літальний апарат двигунами. один оператор» для кожного з N дистанційно пілоТаким чином, спосіб керування польотом дистованих літальних апаратів, що перебувають у танційно пілотованих літальних апаратів при їх строю, або по заданій програмі автоматично, на груповому використанні, який заявляється, відпоетапі прольоту/подоланні зони протиповітряної відає критерію корисної моделі «новизна». оборони супротивника керування дистанційно піСуть корисної моделі пояснюється за допомолотованими літальними апаратами здійснюють за гою ілюстрацій, де на Фіг. 1 представлена блоксхемою «всі літальні апарати - один оператор» схема виконання технологічних операцій, що для всіх N дистанційно пілотованих літальних апаскладають суть способу керування польотом дисратів, що перебувають у строю, або по заданій танційно пілотованих літальних апаратів при їх програмі автоматично, а після прольоту зони прогруповому використанні, який заявляється, на Фіг. типовітряної оборони супротивника керування ди2-15 показано схеми виконання етапів, що скластанційно пілотованими літальними апаратами дають суть способу керування польотом дистанздійснюють за схемою «один літальний апарат ційно пілотованих літальних апаратів при їх групоодин оператор» для кожного з N дистанційно піловому використанні, який заявляється. тованих літальних апаратів, що перебувають у Суть способу керування польотом дистанційно строю, або по заданій програмі автоматично. Суть пілотованих літальних апаратів при їх груповому корисної моделі полягає також і в тому, що як дисвикористанні пояснюється за допомогою технолотанційно пілотовані літальні апарати використовугічних операцій, згідно з якими послідовно здійсють дистанційно керовані безпілотні літальні апанюється наступне (див. блок-схему на Фіг. 1 та рати з електричними, поршневими, схеми на Фіг. 2-15). турбогвинтовими або турбореактивними двигунаПопередньо на базових аеродромах (1) або на ми. стартових площадках (2) підготовляють N дистанПорівняльний аналіз технічного рішення з проційно пілотованих літальних апаратів (3) [4] (див. тотипом показує, що спосіб керування польотом схему на Фіг. 2), при цьому в якості дистанційно дистанційно пілотованих літальних апаратів при їх пілотованих літальних апаратів (3) використовугруповому використанні, який заявляється, відрізють дистанційно керовані безпілотні літальні апаняється тим, що у точці збору здійснюють побудорати з електричними, поршневими, турбогвинтову групи дистанційно пілотованих літальних апавими або турбореактивними двигунами [5], [6]. ратів у бойовий порядок типу «клин», «пеленг», Після підготовки забезпечують зліт з базових «кільватер» або «змішаний строй», а у процесі аеродромів (1) або стартових площадок (2) N запобудови групи дистанційно пілотованих літальних значених дистанційно пілотованих літальних апаапаратів у бойовий порядок забезпечують розміратів (3) (див. схему на Фіг. 3). щення зазначених дистанційно пілотованих літаДалі забезпечують переліт зазначених N дисльних апаратів так, щоб забезпечувався вимір танційно пілотованих літальних апаратів (3) у точдистанції та кута візування між провідними та веку збору (4) та забезпечують у точці збору (4) педеним дистанційно пілотованими літальними апаребудування дистанційно пілотованих літальних ратами в першій парі між собою або в кожній парі апаратів (3) в групу (позиція „Г") (див. схему на при польоті групи зазначених дистанційно пілотоФіг. 4). ваних літальних апаратів, де ведений дистанційно Здійснюють у точці збору (4) побудову групи пілотований літальний апарат першої пари стає дистанційно пілотованих літальних апаратів (3) у ведучим для третього дистанційно пілотованого бойовий порядок типу «клин» (див. схему на Фіг. літального апарата, при цьому на етапі підльоту 5), «пеленг» (див. схему на Фіг. 6), «кільватер» до зони протиповітряної оборони супротивника (див. схему на Фіг. 7) або «змішаний строй» [7], керування дистанційно пілотованими літальними [8](див. схему на Фіг. 8). апаратами здійснюють за схемою «один літальний Забезпечують у процесі побудови групи дисапарат - один оператор» для кожного з N дистантанційно пілотованих літальних апаратів (3) у боційно пілотованих літальних апаратів, що перебуйовий порядок розміщення зазначених дистанційвають у строю, або по заданій програмі автоматино пілотованих літальних апаратів (3) так, щоб чно, на етапі прольоту/подоланні зони забезпечувався вимір дистанції d та кута візупротиповітряної оборони супротивника керування вання між провідними (позиція „П") та веденим дистанційно пілотованими літальними апаратами (позиція „В") дистанційно пілотованими літальними здійснюють за схемою «всі літальні апарати - один апаратами (3) в першій парі між собою або в кожоператор» для всіх N дистанційно пілотованих ній парі при польоті групи зазначених дистанційно 7 58102 8 пілотованих літальних апаратів (3), де ведений наступною атакою по них щодо знищення ці(позиція „В") дистанційно пілотований літальний лі/цілей (7), або удар дистанційно пілотованими апарат (3) першої пари стає провідним (позиція літальними апаратами (3) по цілі/цілям (7) безпо„П") для третього дистанційно пілотованого літасередньо групою) [9] (див. схеми на Фіг. 13-14). льного апарата (3) (див. схему на Фіг. 9). Після виконання бойового завдання дистанПісля завершення процесу побудови групи диційно пілотовані літальні апарати (3) повертаються станційно пілотованих літальних апаратів (3) у на базу (на аеродроми (1) або на стартові площабойовий порядок здійснюють підліт дистанційно дки (2) відповідно) аналогічно зазначеному вище пілотованих літальних апаратів (3) до зони (5) про(у зворотному порядку) (див. схему на Фіг. 15). типовітряної оборони супротивника, при цьому на Підвищення ефективності застосування спозазначеному етапі польоту забезпечують дистансобу керування польотом дистанційно пілотованих ційне керування (позиція "К") зазначеними дистанлітальних апаратів при їх груповому використанні, ційно пілотованими літальними апаратами (3) що заявляється, у порівнянні із прототипом, дося(див. схему на Фіг. 10). Причому на етапі підльоту гається шляхом виміру дистанції та кута візування дистанційно пілотованих літальних апаратів (3) до між провідними та веденим літальними апаратами зони (5) протиповітряної оборони супротивника в парі між собою або в кожній парі при польоті грукерування ("К") зазначеними дистанційно пілотопи літальних апаратів, що, у свою чергу, дозволяє ваними літальними апаратами (3) здійснюють за забезпечити надійне керування для найбільш схемою «один літальний апарат (3) - один операефективного вирішення завдань між літакової натор (6)» для кожного з N дистанційно пілотованих вігації, автоматизацію керування польотом при літальних апаратів (3), що перебувають у строю, витримуванні місця, маневрування в групі, виклюабо по заданій програмі автоматично. чення можливості зіткнення при виникненні нештаДалі здійснюють прольот/подолання дистантних ситуацій. ційно пілотованими літальними апаратами (3) зони Джерела інформації: (5) протиповітряної оборони супротивника, при Л. Асланян А. Э. Системы автоматического цьому на зазначеному етапі польоту забезпечують управления полетом летательных аппаратов. дистанційне керування ("К") зазначеними дистанЧасть 1. / А. Э. Асланян. - К.: КВВАИУ, 1984, -435с. ційно пілотованими літальними апаратами (3) (на 2. Мосов С. Беспилотная разведывательная етапі про льоту/по доланні дистанційно пілотоваавиация стран мира: история создания, опыт боеними літальними апаратами (3) зони (5) протиповівого применения, современное состояние, перстряної оборони супротивника керування зазначепективы развития: Монография. - К.: Издательский ними дистанційно пілотованими літальними дом «Румб», 2008. -160 с. -аналог. апаратами (3) здійснюють за схемою «всі літальні 3. Боднер В. А. Системы управления летатеапарати (3) - один оператор (6)» для всіх N дистальными аппаратами /В.А. Боднер. - М.: Машиностнційно пілотованих літальних апаратів (3), що пероение, 1973, - 504 с. - прототип. ребувають у строю, або по заданій програмі авто4. Разведывательные и ударные БПЛА Израиматично (див. схему на Фіг. 11) [7], [8]. ля / Иностранная печать об экономическом, научПісля прольоту/подолання дистанційно пілоно-техническом и военном потенциале государствтованими літальними апаратами (3) зони (5) проучастников СНГ и технических средствах их выявтиповітряної оборони супротивника здійснюють ления. Серия: Технические средства разведываполіт дистанційно пілотованих літальних апаратів тельных служб зарубежных государств. // ЕИБ (3) до цілі (7) для виконання бойового завдання з ВИНИТИ. - 2004. - № 4. - стр. 11-12. поділом групи по цілях (при кількості цілей (7) бі5. Василин Н. Я. Беспилотные летательные льше однієї), при цьому після прольоту дистанційаппараты. - Минск: Издат. ООО «Попурри», 2003. но пілотованих літальних апаратів (3) зони (5) про272 с. типовітряної оборони супротивника керування („К") 6. Разведывательные и ударные БПЛА армии зазначеними дистанційно пілотованими літальниСША / Иностранная печать об экономическом, ми апаратами (3) здійснюють за схемою «один научно-техническом и военном потенциале госулітальний апарат (3) - один оператор (6)» для кождарств-участников СНГ и технических средствах ного з N дистанційно пілотованих літальних апараих выявления. Серия: Технические средства разтів (3), що перебувають у строю, або по заданій ведывательных служб зарубежных государств. // програмі автоматично (див. блок-схему на Фіг. 12) ЕИБ ВИНИТИ. - 2004. - № 4. - стр. 8-9. [7], [8], [9]. 7. Трюхан О. М. Тактика авіації у локальних Закінчують цикл технологічних операцій, які війнах та збройних конфліктах: Досвід, аналіз, тестановлять суть способу керування польотом диснденції /О. М. Трюхан// - К.: НАОУ, 2005. -340 с. танційно пілотованих літальних апаратів при їх 8. Тактика штурмовой авиации (дивизия груповому використанні тим, що здійснюють викополк). - М.: Воениздат, 1989, 344 с. нання дистанційно пілотованими літальними апа9. Тарасенков A.M. Динамика полета и боеворатами (3) бойового завдання (наприклад, за кого маневрирования летательных аппаратов. / A.M. мандами операторів (6) здійснюється розхід Тарасенков, Б.Г. Брага, В.Т. Тараненко // - М.: літальних апаратів (3) з групи по своїм цілям (7) з ВВИА им. проф. Н. Е. Жуковского, 1984, - 512 с. 9 58102 10 11 58102 12 13 58102 14 15 58102 16 17 58102 18 19 Комп’ютерна верстка Л. Купенко 58102 Підписне 20 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFlight control method for remotely piloted air vehicles when group using them
Автори англійськоюHordiievskyi Oleksii Tykhonovych, Aslanian Albert Eduardovych, Tkachenko Volodymyr Anatoliiovych, Bashynskyi Volodymyr Heorhiiovych, Kuznetsov Vladlen Oleksandrovych, Kyrylenko Volodymyr Anatoliiovych, Liashenko Ihor Oleksandrovych, Halushka Volodymyr Ivanovych, Vodchys Oleksandr Hryhorovych, Rasstryhin Oleksandr Oleksiiovych, Sendetskyi Mykola Mykolaiovych, Komarov Volodymyr Oleksandrovych, Khyzhniak Andrii Serhiiovych, Popov Ivan Anatoliiovych, Maneliuk Oleksandr Hryhorovych, Pryputa Ivan Petrovych, Lazurenko Oleksandr Viktorovych, Polskyi Pavlo Viktorovych, Stetsenko Oleksii Yuriiovych, Terletskyi Ihor Ivanovych, Batsman Bohdan Serhiiovych, Balakin Serhii Hennadiiovych, Stolinets Serhii Leonidovych, Dobrovolskyi Yuzef Bronislavovych, Zarytskyi Oleh Ivanovych, Bezkrovnyi Dmytro Volodymyrovych, Holoveschenko Ihor Vasyliovych, Petierin Mykola Kostiantynovych, Zirka Andrii Leonidovych
Назва патенту російськоюСпособ управления полетом дистанционно пилотируемых аппаратов при их групповом использовании
Автори російськоюГордиевский Алексей Тихонович, Асланян Альберт Эдуардович, Ткаченко Владимир Анатольевич, Башинский Владимир Георгиевич, Кузнецов Владлен Александровичч, Кириленко Владимир Анатольевич, Ляшенко Игорь Александрович, Галушка Владимир Иванович, Водчис Александр Григорьевич, Расстригин Александр Алексеевич, Сендецкий Николай Николаевич, Комаров Владимир Александрович, Хижняк Андрей Сергеевич, Попов Иван Анатольевич, Манелюк Александр Григорьевич, Припута Иван Петрович, Лазуренко Александр Викторович, Польский Павел Викторович, Стеценко Алексей Юрьевич, Терлецкий Игорь Иванович, Бацман Богдан Сергеевич, Балакин Сергей Геннадиевич, Столинец Сергей Леонидович, Добровольский Юзеф Брониславович, Зарицкий Олег Иванович, Безкровный Дмитрий Владимирович, Головещенко Игорь Васильевич, Петерин Никита Константинович, Зирка Андрей Леонидович
МПК / Мітки
МПК: G08G 7/00, G01P 5/00, G05D 1/00
Мітки: спосіб, пілотованих, дистанційно, апаратів, літальних, груповому, використанні, керування, польотом
Код посилання
<a href="https://ua.patents.su/10-58102-sposib-keruvannya-polotom-distancijjno-pilotovanikh-litalnikh-aparativ-pri-kh-grupovomu-vikoristanni.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні</a>
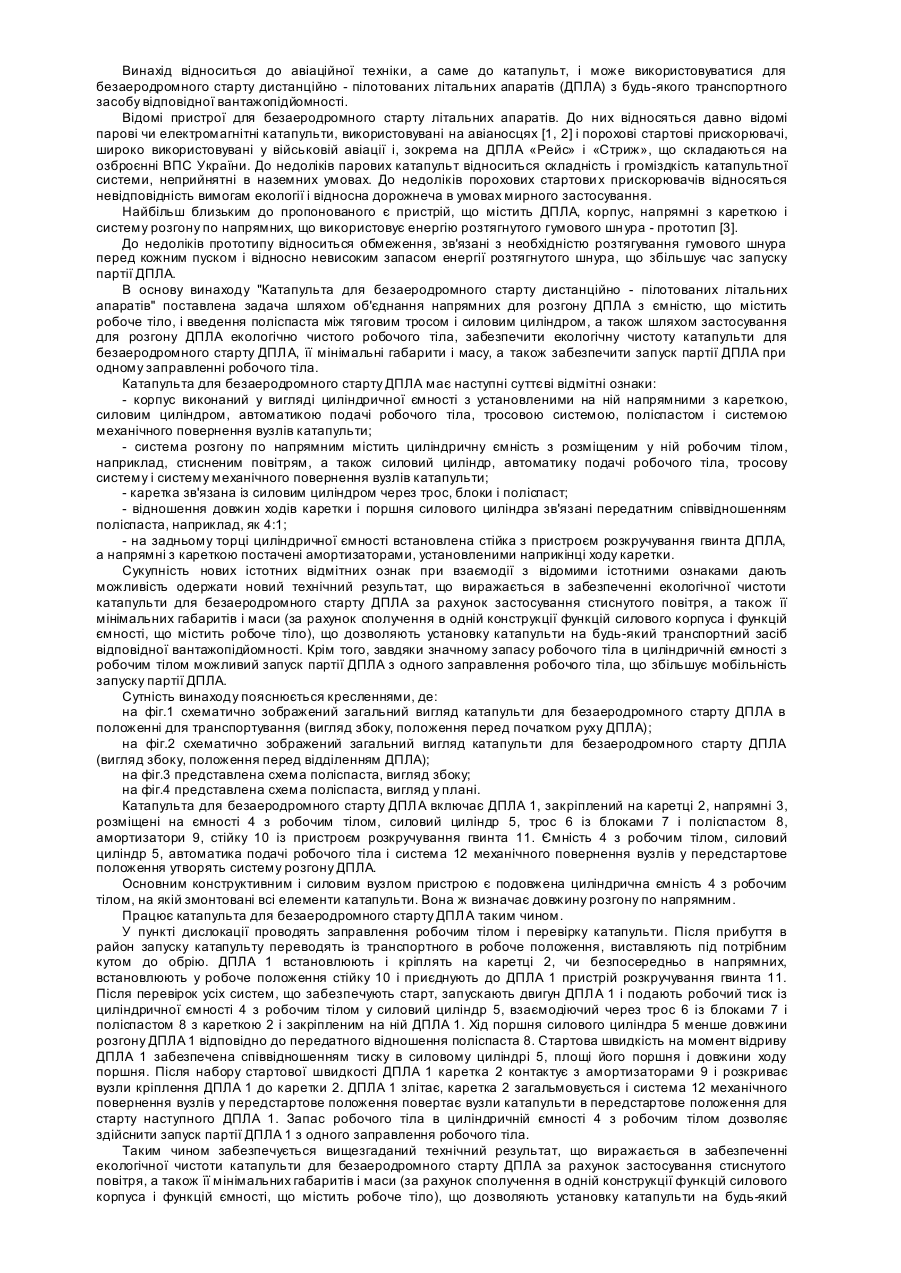
Катапульта для безаеродромного старту дистанційно-пілотованих літальних апаратів
Номер патенту: 65062
Опубліковано: 15.03.2004
Автори: Мельничук Вячеслав Валерійович, Сідельников Леонід Павлович, Лепескин Ігор Борисович, Коваленко Борис Якович
МПК: B64F 1/00
Мітки: безаеродромного, катапульта, старту, апаратів, дистанційно-пілотованих, літальних
Формула / Реферат:
1. Катапульта для безаеродромного старту дистанційно-пілотованих літальних апаратів, що включає дистанційно-пілотований літальний апарат, корпус, напрямні з кареткою і систему розгону по напрямних, яка відрізняється тим, що корпус виконаний як циліндрична ємність з установленими на ній напрямними з кареткою, силовим циліндром, автоматикою подачі робочого тіла, тросовою системою, поліспастом і системою механічного повернення вузлів...
Спосіб ведення повітряної розвідки з використанням дистанційно керованих безпілотних літальних апаратів
Номер патенту: 38011
Опубліковано: 25.12.2008
Автори: Василенко Олександр Васильович, Ткаченко Володимир Анатольович, Лапицький Сергій Володимирович, Лук'янов Павло Олександрович, Гордієвський Олексій Тихонович, Балакін Сергій Геннадійович, Машталір Вадим Віталійович, Жованик Борис Євгенійович, Схабіцький Вадим Романович, Носик Владимир Антонович, Чучмій Андрій Володимирович, Лотоха Людмила Михайлівна, Асланян Альберт Едуардович, Турчин Валентин Миколайович, Хабаров Юрій Валентинович, Заплішна Алла Іванівна, Комаров Володимир Олександрович, Катін Павло Юрійович, Галушка Володимир Анатольович
МПК: H04B 7/185, B64C 31/00
Мітки: літальних, використанням, апаратів, ведення, повітряної, дистанційно, розвідки, спосіб, безпілотних, керованих
Формула / Реферат:
1. Спосіб ведення повітряної розвідки з використанням дистанційно керованих безпілотних літальних апаратів, при якому підготовляють один, два або більше дистанційно керованих безпілотних літальних апаратів, кожний з яких містить вбудоване розвідувальне устаткування, навігаційне устаткування та систему GPS, підготовляють і розгортають пункт прийому розвідувальної інформації, задають програму польоту дистанційно керованих безпілотних літальних...
Спосіб знищення наземних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31127
Опубліковано: 25.03.2008
Автори: Гордієвський Олексій Тихонович, Асланян Альберт Едуардович, Мельник Олександр Дмитрович, Ляшенко Ігор Олександрович, Ткаченко Володимир Анатолійович, Чучмій Андрій Володимирович, Галушка Володимир Іванович, Кононов Олексій Анатолійович, Машталір Вадим Віталійович, Василенко Олександр Васильович, Лук'янов Павло Олександрович, Комаров Володимир Олександрович, Пермяков Олександр Юрійович, Растригін Олександр Олексійович, Сила Ігор Михайлович, Гребеник Олександр Миколайович, Невгад Сергій Степанович, Борохвостов Ігор Валерійович, Лапицький Сергій Володимирович, Ревенко Дмитро Леонідович, Кравченко Юрій Васильович, Чіпіжко Юрій Анатолійович, Парфеня Сергій Григорович
МПК: B64C 31/00, H04B 7/185
Мітки: ударних, літальних, апаратів, дистанційно, знищення, наземних, допомогою, безпілотних, керованих, цілей, спосіб
Формула / Реферат:
1. Спосіб знищення наземних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів, при якому попередньо проводять повітряну розвідку в тилу противника, передають дані на командний пункт і виявляють за результатами розвідки наземні цілі, підготовлюють один, два або більше ударних дистанційно керованих безпілотних літальних апаратів, розміщають на зазначених ударних дистанційно керованих безпілотних літальних апаратах...
Спосіб знищення повітряних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31128
Опубліковано: 25.03.2008
Автори: Лук'янов Павло Олександрович, Чучмій Андрій Володимирович, Степаненко Юрій Костянтинович, Асланян Альберт Едуардович, Мельник Олександр Дмитрович, Лапицький Сергій Володимирович, Схабіцький Вадим Романович, Чіпіжко Юрій Анатолійович, Василенко Олександр Васильович, Парфеня Сергій Григорович, Кононов Олексій Анатолійович, Гребеник Олександр Миколайович, Машталір Вадим Віталійович, Галушка Володимир Іванович, Гордієвський Олексій Тихонович, Анпьонов Валентин Вадимович, Сила Ігор Михайлович, Ткаченко Володимир Анатолійович, Борохвостов Ігор Валерійович, Растригін Олександр Олексійович, Семенюк Римма Петрівна, Сєткін В'ячеслав Вікторович, Комаров Володимир Олександрович
МПК: H04B 7/185, B64C 31/00
Мітки: повітряних, допомогою, знищення, безпілотних, ударних, керованих, апаратів, спосіб, цілей, літальних, дистанційно
Формула / Реферат:
1. Спосіб знищення повітряних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів, при якому підготовлюють ударні дистанційно керовані безпілотні літальні апарати, кожний з яких містить вбудоване навігаційне устаткування, систему GPS і фото/відеоапаратуру, підготовлюють засоби ураження і розгортають пункт прийому інформації, встановлюють засоби ураження на кожний з ударних дистанційно керованих безпілотних...
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31157
Опубліковано: 25.03.2008
Автори: Ткаченко Володимир Анатолійович, Василенко Олександр Васильович, Парфеня Сергій Григорович, Анпьонов Валентин Вадимович, Растригін Олександр Олексійович, Чучмій Андрій Володимирович, Бондарчук Сергій Вікторович, Кононов Олексій Анатолійович, Асланян Альберт Едуардович, Машталір Вадим Віталійович, Гордієвський Олексій Тихонович, Чіпіжко Юрій Анатолійович, Комаров Володимир Олександрович, Галушка Володимир Іванович, Степаненко Юрій Костянтинович, Гребеник Олександр Миколайович, Сила Ігор Михайлович, Схабіцький Вадим Романович, Борохвостов Ігор Валерійович, Лук'янов Павло Олександрович, Мельник Олександр Дмитрович, Лапицький Сергій Володимирович
МПК: H04B 7/185, B64C 31/00
Мітки: керованих, апаратів, дистанційно, спосіб, безпілотних, допомогою, повітряних, літальних, знищення, цілей
Формула / Реферат:
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів, при якому підготовляють дистанційно керований безпілотний літальний апарат, що містить вбудоване навігаційне устаткування і систему GPS, підготовляють засоби ураження і розгортають пункт керування, установлюють засоби ураження на дистанційно керований безпілотний літальний апарат, проводять зліт дистанційно керованого безпілотного літального...
Попередній патент: Спосіб визначення характеристик льодоутворення
Наступний патент: Система керування безпілотним літальним апаратом
Випадковий патент: Спосіб контролю перебігу післяродового періоду у корів