Система керування безпілотним літальним апаратом
Номер патенту: 58103
Опубліковано: 25.03.2011
Автори: Нгуєн Ван Тхінь, Кулік Анатолій Степанович, Прийменко Катерина Сергіївна, Данченко Олександр Вячеславович, Фірсов Сергій Миколайович
Формула / Реферат
Система керування безпілотним літальним апаратом, що містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, магнітний курс, висотомір, перший GPS приймач, виходи яких підключені до першого, другого, третього входів пристрою управління відповідно, яка відрізняється тим, що в неї введені перший модуль бездротового зв'язку, вихід якого з'єднаний з четвертим входом пристрою управління, а вхід з'єднаний з другим виходом пристрою управління на об'єкті керування, безплатформну інерціальну навігаційну систему, вихід якої з'єднаний з п'ятим входом пристрою управління, другий модуль бездротового зв'язку, другий GPS приймач, виходи яких підключені до першого та другого входів персонального комп'ютера відповідно, вихід персонального комп'ютера з'єднаний з першим входом другого модуля бездротового зв'язку.
Текст
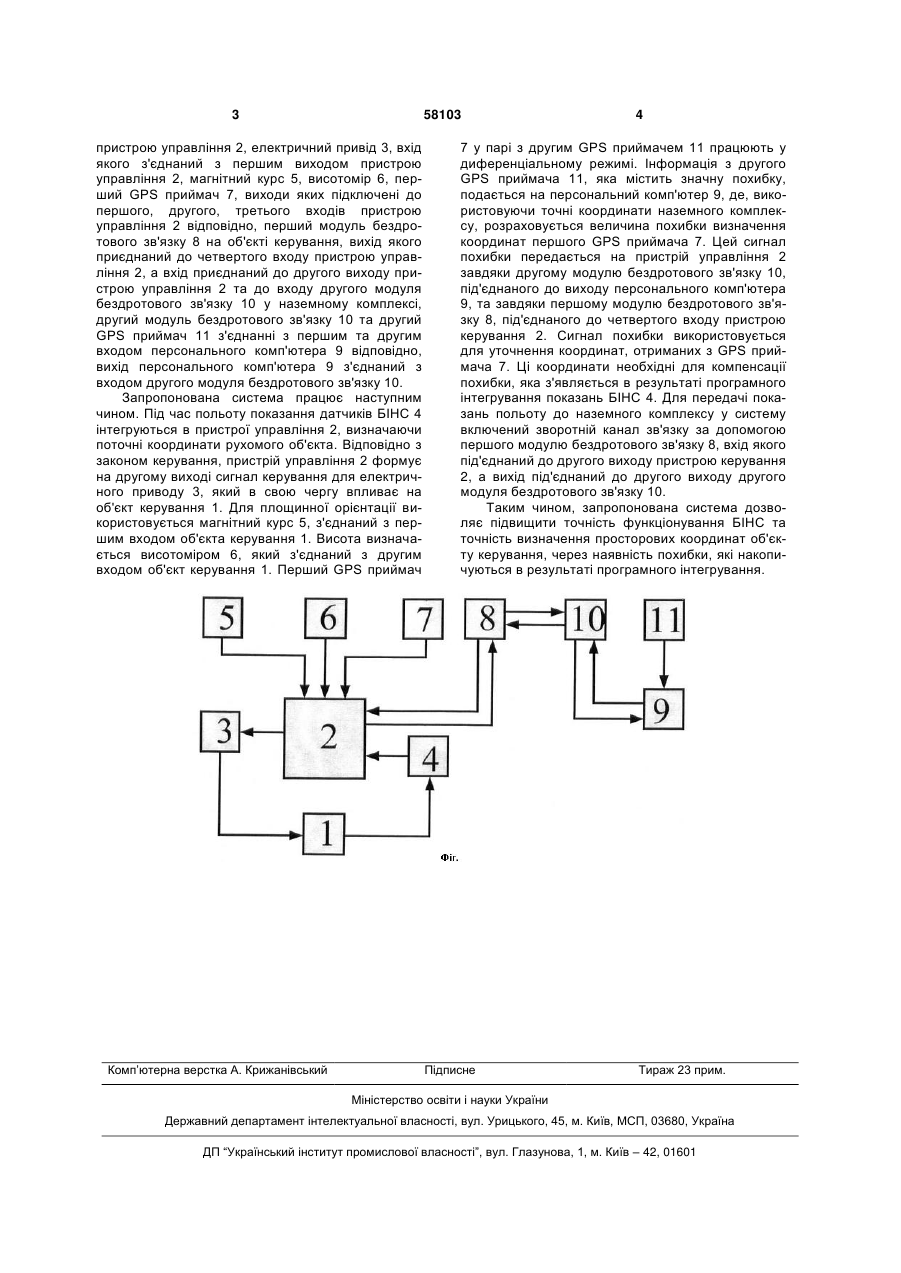
Система керування безпілотним літальним апаратом, що містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, магнітний курс, висотомір, перший 3 58103 пристрою управління 2, електричний привід 3, вхід якого з'єднаний з першим виходом пристрою управління 2, магнітний курс 5, висотомір 6, перший GPS приймач 7, виходи яких підключені до першого, другого, третього входів пристрою управління 2 відповідно, перший модуль бездротового зв'язку 8 на об'єкті керування, вихід якого приєднаний до четвертого входу пристрою управління 2, а вхід приєднаний до другого виходу пристрою управління 2 та до входу другого модуля бездротового зв'язку 10 у наземному комплексі, другий модуль бездротового зв'язку 10 та другий GPS приймач 11 з'єднанні з першим та другим входом персонального комп'ютера 9 відповідно, вихід персонального комп'ютера 9 з'єднаний з входом другого модуля бездротового зв'язку 10. Запропонована система працює наступним чином. Під час польоту показання датчиків БІНС 4 інтегруються в пристрої управління 2, визначаючи поточні координати рухомого об'єкта. Відповідно з законом керування, пристрій управління 2 формує на другому виході сигнал керування для електричного приводу 3, який в свою чергу впливає на об'єкт керування 1. Для площинної орієнтації використовується магнітний курс 5, з'єднаний з першим входом об'єкта керування 1. Висота визначається висотоміром 6, який з'єднаний з другим входом об'єкт керування 1. Перший GPS приймач Комп’ютерна верстка А. Крижанівський 4 7 у парі з другим GPS приймачем 11 працюють у диференціальному режимі. Інформація з другого GPS приймача 11, яка містить значну похибку, подається на персональний комп'ютер 9, де, використовуючи точні координати наземного комплексу, розраховується величина похибки визначення координат першого GPS приймача 7. Цей сигнал похибки передається на пристрій управління 2 завдяки другому модулю бездротового зв'язку 10, під'єднаного до виходу персонального комп'ютера 9, та завдяки першому модулю бездротового зв'язку 8, під'єднаного до четвертого входу пристрою керування 2. Сигнал похибки використовується для уточнення координат, отриманих з GPS приймача 7. Ці координати необхідні для компенсації похибки, яка з'являється в результаті програмного інтегрування показань БІНС 4. Для передачі показань польоту до наземного комплексу у систему включений зворотній канал зв'язку за допомогою першого модулю бездротового зв'язку 8, вхід якого під'єднаний до другого виходу пристрою керування 2, а вихід під'єднаний до другого виходу другого модуля бездротового зв'язку 10. Таким чином, запропонована система дозволяє підвищити точність функціонування БІНС та точність визначення просторових координат об'єкту керування, через наявність похибки, які накопичуються в результаті програмного інтегрування. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of pilotless plane
Автори англійськоюKulik Anatolii Stepanovych, Firsov Serhii Mykolaiovych, Danchenko Oleksandr Viacheslavovych, Nhuien Van Tkhin, Pryimenko Kateryna Serhiivna
Назва патенту російськоюСистема управления беспилотным летательным аппаратом
Автори російськоюКулик Анатолий Степанович, Фирсов Сергей Николаевич, Данченко Александр Вячеславович, Нгуен Ван Тхинь, Прийменко Екатерина Сергеевна
МПК / Мітки
МПК: B64C 21/00
Мітки: безпілотним, апаратом, керування, літальним, система
Код посилання
<a href="https://ua.patents.su/2-58103-sistema-keruvannya-bezpilotnim-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Система керування безпілотним літальним апаратом</a>
Система керування безпілотним літальним апаратом
Номер патенту: 55410
Опубліковано: 10.12.2010
Автори: Нгуен Ван Тхінь, Таранова Світлана Ігорівна, Кулік Анатолій Степанович, Фірсов Сергій Миколайович
МПК: B64C 21/00
Мітки: літальним, апаратом, безпілотним, система, керування
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, вхід якого з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, пятого входів пристрою управління відповідно, яка відрізняється тим, що в неї...
Система керування безпілотним літальним апаратом
Номер патенту: 46179
Опубліковано: 10.12.2009
Автори: Гусарова Ганна Григорівна, Кулік Анатолій Степанович, До Куок Туан, Фірсов Сергій Миколайович
МПК: B64C 21/00
Мітки: безпілотним, літальним, керування, система, апаратом
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, яка відрізняється тим, що в неї введені магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, п'ятого входів пристрою управління...
Система керування безпілотним літальним апаратом
Номер патенту: 54022
Опубліковано: 25.10.2010
Автори: Назарова Анастасія Олександрівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00
Мітки: безпілотним, апаратом, літальним, керування, система
Формула / Реферат:
Система керування безпілотним літальним апаратом, що складається з послідовно з'єднаних підсилювача, рульової машини, керма висоти, безпілотного літального апарата, а також пристрою зворотного зв'язку, вхід якого з'єднаний з першим виходом рульової машини, швидкісного гіроскопа, вхід якого з'єднаний з виходом безпілотного літального апарата, гіровертикалі, вхід якої з'єднаний з виходом безпілотного літального апарата, висотоміра, вхід якого...
Система керування літальним апаратом
Номер патенту: 36519
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Полторацька Маргарита Миколаївна
МПК: G05D 1/03, B64C 13/00
Мітки: апаратом, система, літальним, керування
Формула / Реферат:
Система керування літальним апаратом, що містить важіль керування, завантажувальну пружину, датчик кутового положення важеля керування, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій, яка відрізняється тим, що до її складу введені перший аналого-цифровий перетворювач, вхід якого...
Система керування космічним літальним апаратом
Номер патенту: 11982
Опубліковано: 16.01.2006
Автори: Гавриленко Олег Іванович, Ворончук Сергій Петрович
МПК: B64G 1/24
Мітки: система, космічним, керування, літальним, апаратом
Формула / Реферат:
Система керування космічним літальним апаратом, що складається з датчика кута, датчика кутових швидкостей, першого та другого масштабного блоків, послідовно з'єднаних підсилювача потужності, електродвигуна, ротора електродвигуна, тахометра, яка відрізняється тим, що додатково введено мікропроцесорний пристрій, перший і другий вхід якого з'єднані з виходами першого і другого масштабних блоків відповідно, вихід мікропроцесорного блока з'єднаний...
Попередній патент: Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні
Наступний патент: Оптимізуючий процесор
Випадковий патент: Гравітаційний двигун