Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд
Номер патенту: 75876
Опубліковано: 15.06.2006
Автори: Чаплигін Валерій Іванович, Мальцева Яна Валеріївна, Шокарев Віктор Семенович

Формула / Реферат
1. Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд, яка містить вимірювальні канали з електромагнітними датчиками, які складаються з первинного індуктивного перетворювача з рухомим циліндричним магнітопроводом, на якому розташовані по чотири ідентичних основних котушки індуктивності, ввімкнених випусками в основний комутатор котушок, з'єднаний виходом з основним перетворювачем індуктивності в період, ввімкнений виходом в центральний комутатор, до виходу якого приєднане коло з послідовно з'єднаних між собою лінії зв'язку, аналогово-цифрового перетворювача, обчислювального пристрою, пристрою відображення інформації, причому обчислювальний пристрій з'єднаний з блоком банку даних, аналогово-цифровий перетворювач, засіб відображення інформації і центральний комутатор з'єднані з пультом керування, яка відрізняється тим, що електромагнітна інформаційно-вимірювальна система містить сукупність інформаційних каналів, кількість яких дорівнює кількості модулів електромагнітних датчиків, встановлених на об'єкті, кожний модуль містить сукупність електромагнітних датчиків, кількість яких в кожному модулі визначається кількістю контрольованих параметрів, кожний датчик в модулі містить один базовий первинний індуктивний перетворювач, на магнітопроводі якого розташована циліндрична втулка з діелектричного матеріалу, на якій розташовані з можливістю переміщення і фіксації два каркаси, на кожному з яких розташовані по дві ідентичні основні котушки індуктивності, між торцями каркасів на втулці розташовані дві феромагнітні шайби, виконані з можливістю зміщення, у напрямку поздовжньої осі симетрії магнітопроводу виконаний отвір з нарізкою, в центрі якого встановлений каркас з двома додатковими контрольними котушками індуктивності, по торцях каркаса встановлені феромагнітні шайби, випуски контрольних котушок індуктивності ввімкнені в додатковий комутатор котушок, з'єднаний з додатковим перетворювачем індуктивності котушок в період, який з контрольними котушками індуктивностей створює додаткові контрольні канали, кількість яких в кожному інформаційному каналі дорівнює кількості базових індуктивних перетворювачів у складі окремого модуля, випуски всіх котушок індуктивностей кожного модуля з'єднані з додатковим автономним розніманням.
2. Система за п. 1, яка відрізняється тим, що початкове значення індуктивностей основних і додаткових котушок базових перетворювачів у складі всіх модулів встановлюється однієї величини, для чого в поздовжньому отворі магнітопроводу феромагнітні шайби зміщують відносно торців каркаса, а на поверхні магнітопроводу зміщують на циліндричній втулці феромагнітні шайби, поки значення індуктивностей всіх котушок не стануть однаковими.
3. Система за п. 1, яка відрізняється тим, що товщина стінки (![]() ), яка створена поверхнею магнітопроводу базового перетворювача і отвору в ньому відповідає
), яка створена поверхнею магнітопроводу базового перетворювача і отвору в ньому відповідає
умові :
 де
де
![]() - магнітна проникність матеріалу магнітопроводу,
- магнітна проникність матеріалу магнітопроводу,
![]() електропровідність матеріалу магнітопроводу;
електропровідність матеріалу магнітопроводу;
![]() - магнітна проникність вакууму;
- магнітна проникність вакууму;
f - середнє значення частоти імпульсів струму.
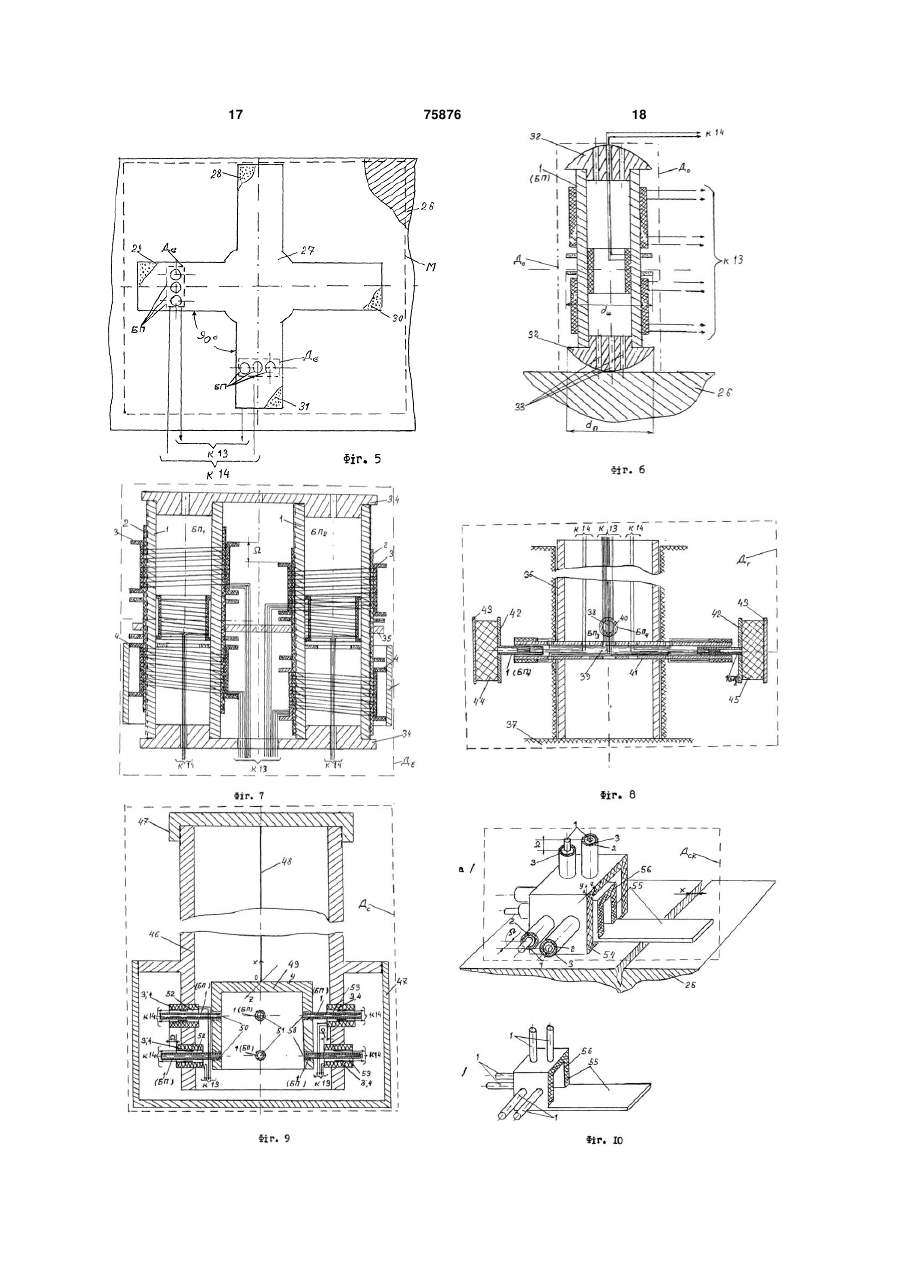
4 Система за п. 1, яка відрізняється тим, що містить електромагнітний датчик контролю механічних напруг, виконаний з трьох паралельно скріплених між собою магнітопроводів, встановлених в одній площині симетрично по висоті, а датчик складається з трьох базових перетворювачів, в магнітопроводи яких із одного боку вкручені феромагнітні гвинти з головкою у формі півсфери, виконані з матеріалу з магнітною проникністю, на порядок меншою магнітної проникності матеріалу магнітопроводу, всі каркаси закріплені з втулками на магнітопроводах.
5. Система за одним з пп. 1 або 4, яка відрізняється тим, що містить електромагнітний датчик контролю пластичних деформацій, а для визначення моменту виникнення пластичних деформацій на контрольованому матеріалі закріплюють на поверхні мінімум в двох взаємно перпендикулярних напрямках по одному електромагнітному датчику, фіксують початкові і вихідні параметри, потім фіксують при контролі датчик з першим екстремумом індуктивності або вихідного сигналу, потім фіксують в цьому датчику другий екстремум, який відповідає виникненню пластичних деформацій.
6.Система за одним з пп. 1, 4 або 5, яка відрізняється тим, що для контролю механічних напруг в неферомагнітних матеріалах на поверхню контрольованого матеріалу наносять шар феромагнітного матеріалу у формі кола мінімум з чотирма променями, виконаними під кутом 90° один до одного та шириною, більшою трьох діаметрів базових перетворювачів, встановлюють на кожний промінь електромагнітний датчик полюсом перпендикулярно до поздовжньої осі променя.
7. Система за одним з пп. 1 або 4, яка відрізняється тим, що містить електромагнітний датчик контролю однорідності феромагнітного матеріалу конструкцій, в якій електромагнітний датчик складається з базового перетворювача, в магнітопровід якого з двох боків вкручені феромагнітні гвинти з сферичною головкою, в яких в радіальному напрямку виконані отвори, діаметр сферичних головок рівний діаметру феромагнітних шайб на магнітопроводі.
8. Система за п. 1 , яка відрізняється тим, що містить електромагнітний датчик контролю деформацій, який складається з двох базових первинних індуктивних перетворювачів, розташованих симетрично і паралельно один до одного поздовжніми осями симетрії магнітопроводів, які скріплені між собою по торцях діелектричною пластиною, та пари каркасів, розташованих на магнітопроводах, скріплених між собою і зміщених попарно відносно торців магнітопроводів.
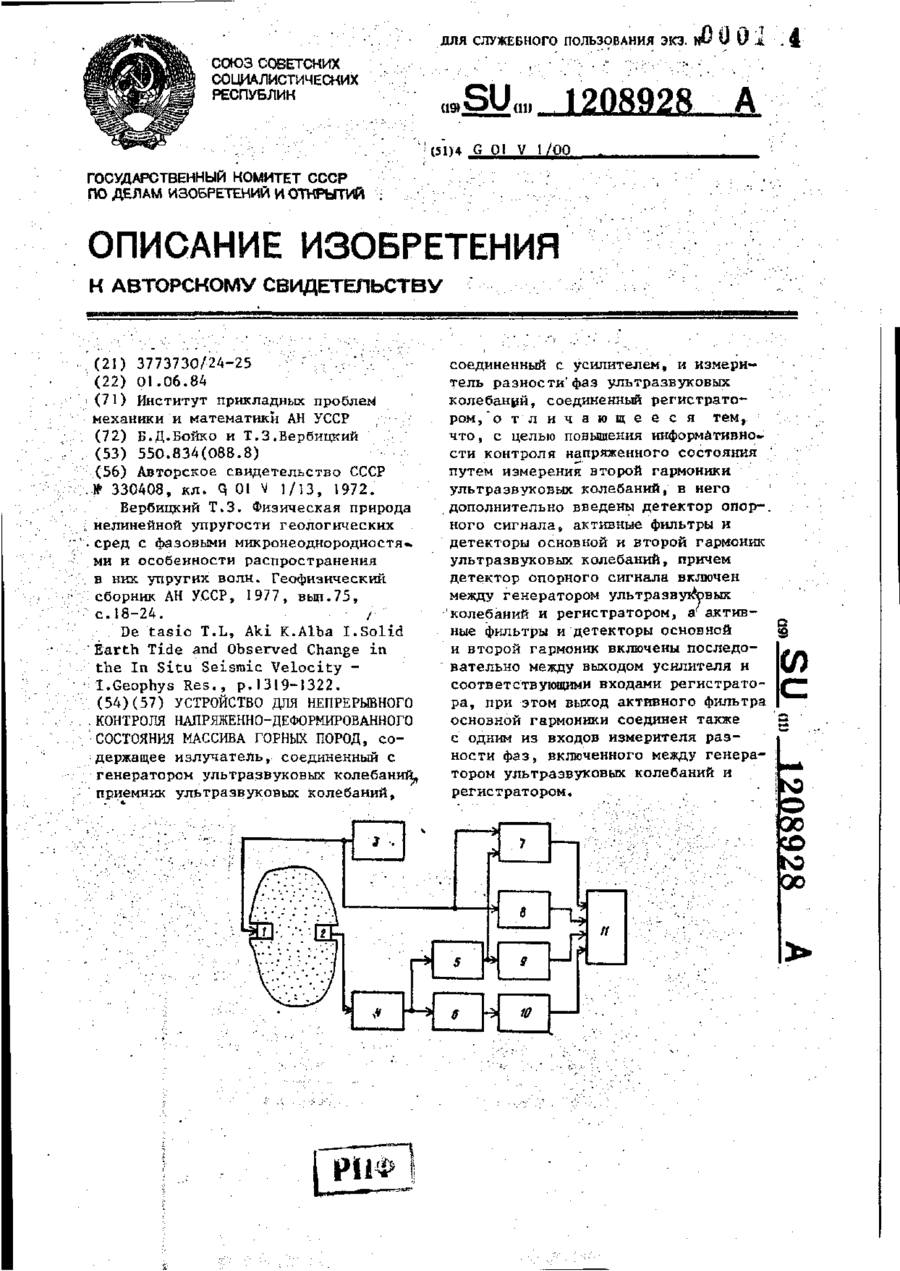
9. Система за п. 1, яка відрізняється тим, що, містить пристрій для контролю величини і напрямку зміщень ґрунтів та містить електромагнітний датчик, розташований на несучій металевій трубі, що закріплена одним кінцем у корінну породу, а в несучій трубі перпендикулярно до її поздовжньої осі мінімум в двох взаємно перпендикулярних напрямках виконані отвори, в яких симетрично закріплені діелектричні трубки, кінці трубок виконані у формі первинних базових перетворювачів, каркаси яких з обмотками зміщені відносно торців, вставлених в кінці трубок магнітопроводів, скріплених між собою діелектричним стрижнем, на торцях магнітопроводів закріплені феромагнітні пластини, скріплені з каркасами пружними діелектричними шайбами.
10. Система за одним з пп. 1 або 5, яка відрізняється тим, що містить пристрій для контролю величини і напрямку зміщень від нахилу конструкцій, який складається з несучого циліндричного корпусу, виконаного з діелектричного матеріалу, до верхньої кришки корпусу у напрямку вертикальної осі симетрії корпусу і гравітаційної вертикалі закріплений на підвісці циліндричний маятник, в стінці корпусу перпендикулярно до осі маятника встановлений первинний індуктивний перетворювач, а маятник виконаний у формі порожнистого циліндра, закріпленого основою до підвіски, в стінках маятника-циліндра мінімум у двох взаємно перпендикулярних напрямках перпендикулярно до осі маятника виконані по два отвори у напрямку осі маятника, в які вкручені магнітопроводами базові первинні індуктивні перетворювачі, а їх каркаси з котушками закріплені в стінці несучого корпусу, каркаси і магнітопроводи виконані з можливістю зміщення в двох взаємно перпендикулярних напрямках.
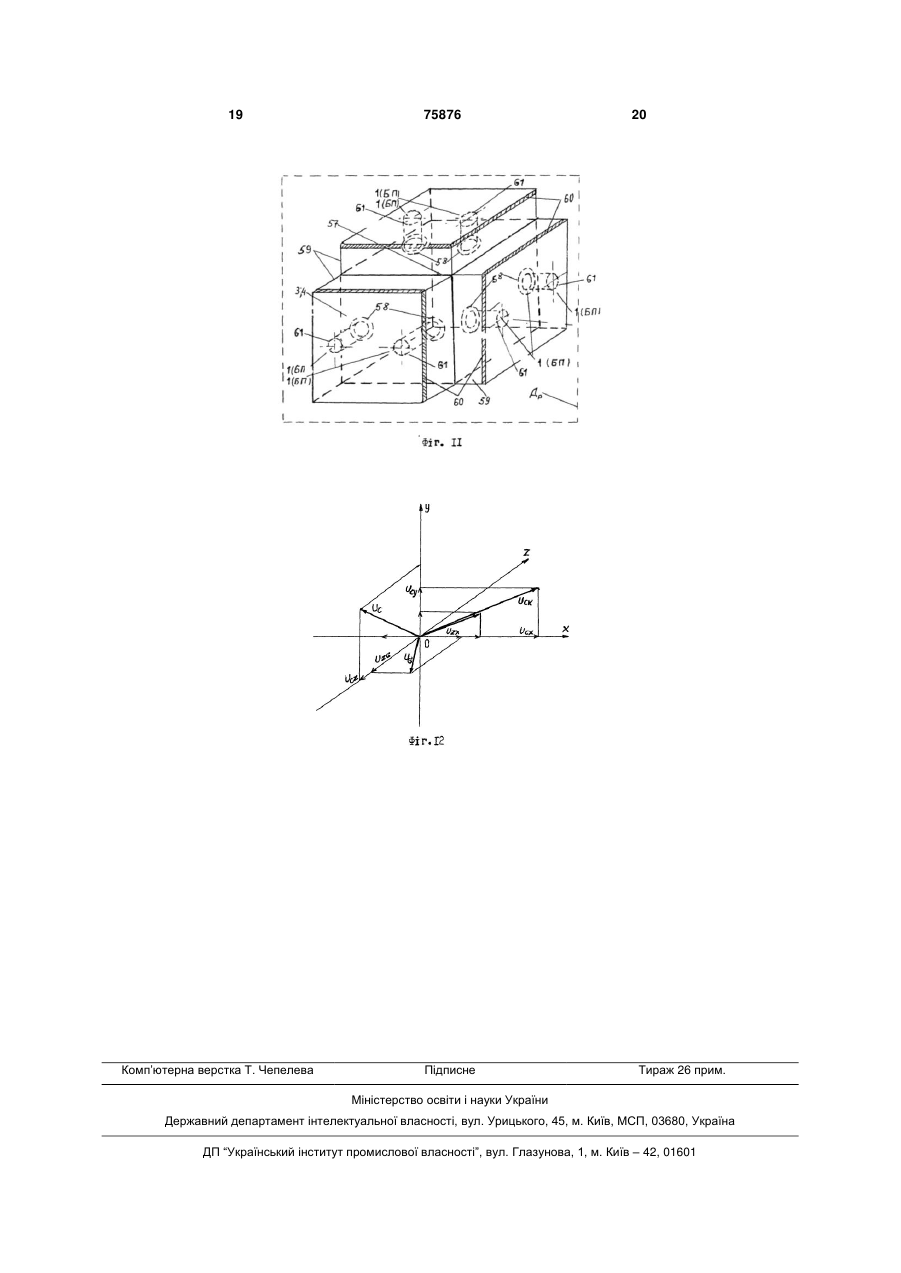
11. Система за одним з пп. 1 або 8, яка відрізняється тим, що містить пристрій для контролю величини і напрямку зміщень двох конструкцій відносно один одного, яке складається з електромагнітного датчика, виконаного з несучого корпусу у формі порожнистого куба з діелектричного матеріалу, у стінках якого в трьох ортогональних площинах в перпендикулярних до них напрямках встановлені первинні індуктивні перетворювачі, всередині кубічного корпусу розташований якір, виконаний з можливістю зміщення відносно корпусу, а в стінках корпусу у напрямку, перпендикулярному до трьох ортогональних площин, в отворах парами закріплені каркаси базових первинних перетворювачів, їх магнітопроводи закріплені симетрично до каркасів у стінках корпусу якоря, виконаного у формі куба, каркаси і магнітопроводи виконані з можливістю відносного зміщення в двох взаємно перпендикулярних напрямках.
12. Система за одним з пп. 1 або 8, яка відрізняється тим, що датчик для контролю тиску в трьох взаємно перпендикулярних напрямках містить електромагнітний датчик, виконаний з жорсткого монолітного корпусу кубічної форми, в трьох ортогональних площинах якого в перпендикулярному до них напрямку виконані по два наскрізних отвори, в яких закріплені каркаси базових первинних перетворювачів, до кожної з трьох ортогональних площин монолітного каркаса прикріплений еластичний діелектричний матеріал у формі прямокутника, в якому співвісно отворам у монолітному матеріалі виконані отвори з діаметром, рівним діаметру магнітопроводу базового перетворювача, на поверхні еластичних прямокутників закріплені жорсткі пластини прямокутної форми, в яких виконані отвори з нарізкою, у які вкручені магнітопроводи базових перетворювачів, каркаси і магнітопроводи виконані з можливістю поздовжнього зміщення.
Текст
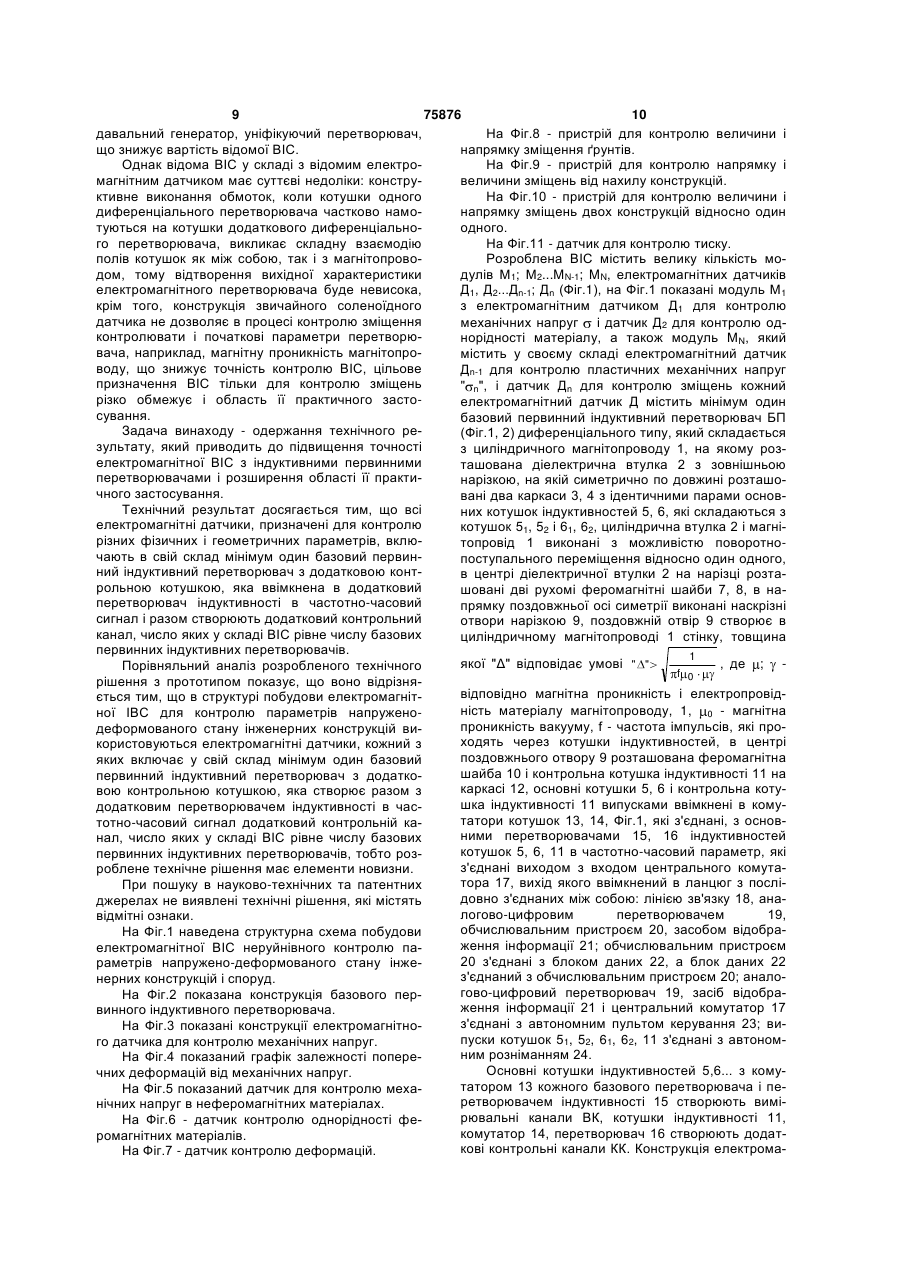
1. Електромагнітна вимірювальноінформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд, яка містить вимірювальні канали з електромагнітними датчиками, які складаються з первинного індуктивного перетворювача з рухомим циліндричним магнітопроводом, на якому розташовані по чотири ідентичних основних котушки індуктивності, ввімкнених випусками в основний комутатор котушок, з'єднаний виходом з основним перетворювачем індуктивності в період, ввімкнений виходом в центральний комутатор, до виходу якого приєднане коло з послідовно з'єднаних між собою лінії зв'язку, аналогово-цифрового перетворювача, обчислювального пристрою, пристрою відображення інформації, причому обчислювальний пристрій з'єднаний з блоком банку даних, аналогово-цифровий перетворювач, засіб відображення інформації і центральний комутатор з'єднані з пультом керування, яка відрізняється тим, що електромагнітна інформаційновимірювальна система містить сукупність інформаційних каналів, кількість яких дорівнює кількості модулів електромагнітних датчиків, встановлених на об'єкті, кожний модуль містить сукупність електромагнітних датчиків, кількість яких в кожному модулі визначається кількістю контрольованих параметрів, кожний датчик в модулі містить один базовий первинний індуктивний перетворювач, на магнітопроводі якого розташована циліндрична втулка з діелектричного матеріалу, на якій розташовані з можливістю переміщення і фіксації два 2 (19) 1 3 75876 4 одній площині симетрично по висоті, а датчик магнітопроводів закріплені феромагнітні пластини, складається з трьох базових перетворювачів, в скріплені з каркасами пружними діелектричними магнітопроводи яких із одного боку вкручені фешайбами. 10. Система за одним з пп.1 або 5, яка відрізняромагнітні гвинти з головкою у формі півсфери, ється тим, що містить пристрій для контролю вевиконані з матеріалу з магнітною проникністю, на порядок меншою магнітної проникності матеріалу личини і напрямку зміщень від нахилу конструкцій, магнітопроводу, всі каркаси закріплені з втулками який складається з несучого циліндричного корпуна магнітопроводах. су, виконаного з діелектричного матеріалу, до вер5. Система за одним з пп.1 або 4, яка відрізняхньої кришки корпусу у напрямку вертикальної осі ється тим, що містить електромагнітний датчик симетрії корпусу і гравітаційної вертикалі закріплеконтролю пластичних деформацій, а для визнаний на підвісці циліндричний маятник, в стінці корчення моменту виникнення пластичних деформапусу перпендикулярно до осі маятника встановлецій на контрольованому матеріалі закріплюють на ний первинний індуктивний перетворювач, а поверхні мінімум в двох взаємно перпендикулярмаятник виконаний у формі порожнистого циліндних напрямках по одному електромагнітному датра, закріпленого основою до підвіски, в стінках чику, фіксують початкові і вихідні параметри, потім маятника-циліндра мінімум у двох взаємно перпефіксують при контролі датчик з першим екстремундикулярних напрямках перпендикулярно до осі мом індуктивності або вихідного сигналу, потім маятника виконані по два отвори у напрямку осі фіксують в цьому датчику другий екстремум, який маятника, в які вкручені магнітопроводами базові відповідає виникненню пластичних деформацій. первинні індуктивні перетворювачі, а їх каркаси з 6.Система за одним з пп.1, 4 або 5, яка відрізнякотушками закріплені в стінці несучого корпусу, ється тим, що для контролю механічних напруг в каркаси і магнітопроводи виконані з можливістю неферомагнітних матеріалах на поверхню контрозміщення в двох взаємно перпендикулярних нальованого матеріалу наносять шар феромагнітнопрямках. 11. Система за одним з пп.1 або 8, яка відрізняго матеріалу у формі кола мінімум з чотирма проється тим, що містить пристрій для контролю веменями, виконаними під кутом 90° один до одного та шириною, більшою трьох діаметрів базових личини і напрямку зміщень двох конструкцій відноперетворювачів, встановлюють на кожний промінь сно один одного, яке складається з електромагнітний датчик полюсом перпендикуляелектромагнітного датчика, виконаного з несучого рно до поздовжньої осі променя. корпусу у формі порожнистого куба з діелектрич7. Система за одним з пп.1 або 4, яка відрізняного матеріалу, у стінках якого в трьох ортогонається тим, що містить електромагнітний датчик льних площинах в перпендикулярних до них наконтролю однорідності феромагнітного матеріалу прямкахвстановлені первинні індуктивні конструкцій, в якій електромагнітний датчик склаперетворювачі, всередині кубічного корпусу роздається з базового перетворювача, в магнітопроташований якір, виконаний з можливістю зміщення від якого з двох боків вкручені феромагнітні гвинти відносно корпусу, а в стінках корпусу у напрямку, з сферичною головкою, в яких в радіальному наперпендикулярному до трьох ортогональних плопрямку виконані отвори, діаметр сферичних голощин, в отворах парами закріплені каркаси базових вок рівний діаметру феромагнітних шайб на магніпервинних перетворювачів, їх магнітопроводи затопроводі. кріплені симетрично до каркасів у стінках корпусу 8. Система за п.1 , яка відрізняється тим, що місякоря, виконаного у формі куба, каркаси і магнітотить електромагнітний датчик контролю деформапроводи виконані з можливістю відносного зміцій, який складається з двох базових первинних щення в двох взаємно перпендикулярних наіндуктивних перетворювачів, розташованих симепрямках. 12. Система за одним з пп.1 або 8, яка відрізнятрично і паралельно один до одного поздовжніми ється тим, що датчик для контролю тиску в трьох осями симетрії магнітопроводів, які скріплені між собою по торцях діелектричною пластиною, та взаємно перпендикулярних напрямках містить пари каркасів, розташованих на магнітопроводах, електромагнітний датчик, виконаний з жорсткого скріплених між собою і зміщених попарно відносно монолітного корпусу кубічної форми, в трьох ортоторців магнітопроводів. гональних площинах якого в перпендикулярному 9. Система за п.1, яка відрізняється тим, що, до них напрямку виконані по два наскрізних отвомістить пристрій для контролю величини і напрямри, в яких закріплені каркаси базових первинних ку зміщень ґрунтів та містить електромагнітний перетворювачів, до кожної з трьох ортогональних датчик, розташований на несучій металевій трубі, площин монолітного каркаса прикріплений еластищо закріплена одним кінцем у корінну породу, а в чний діелектричний матеріал у формі прямокутнинесучій трубі перпендикулярно до її поздовжньої ка, в якому співвісно отворам у монолітному матеосі мінімум в двох взаємно перпендикулярних наріалі виконані отвори з діаметром, рівним діаметру прямках виконані отвори, в яких симетрично закрімагнітопроводу базового перетворювача, на повеплені діелектричні трубки, кінці трубок виконані у рхні еластичних прямокутників закріплені жорсткі формі первинних базових перетворювачів, каркаси пластини прямокутної форми, в яких виконані яких з обмотками зміщені відносно торців, вставотвори з нарізкою, у які вкручені магнітопроводи лених в кінці трубок магнітопроводів, скріплених базових перетворювачів, каркаси і магнітопроводи між собою діелектричним стрижнем, на торцях виконані з можливістю поздовжнього зміщення. 5 Винахід належить до області контрольновимірювальної техніки, а саме до неруйнівного контролю інформаційно-вимірювальними системами (ВІС) параметрів напружено-деформованого стану інженерних конструкцій і споруд: машин, корпусів суден, мостів, будівель і інших об'єктів, наприклад механічних напруг, фізико-механічних властивостей матеріалів, зміщень, тисків і ін. Для оцінки напружено-деформованого стану потрібно проводити контроль різноманітних параметрів об'єктів в різних їх конструкціях, що призводить до необхідності мати в складі ВІС великої кількості датчиків, які використовують різний принцип дії, а отже і різні по побудові і принципу роботи первинні вимірювальні перетворювачі, наприклад, тензометричні, магнітопружні, магнітострикційні для контролю зусиль, обертових моментів і механічних напруг; індуктивні, електромагнітні, реостатні - для контролю лінійних і кутових зміщень; електромагнітні, рідинні - для контролю відносних осадок і переміщення основ і ґрунтів. Часто виникає задача контролю інформаційної системи, величини і напрямку зміщень конструкцій, величини і напрямку зміщень від нахилу конструкцій, величини і напрямку дії механічних напруг - що вимагає застосування у складі ВІС матричних датчиків, які наповнюються на основі використання декількох первинних вимірювальних перетворювачів. Така велика кількість датчиків за конструктивним виконанням і принципом роботи у складі ВІС знижує їх метрологічні характеристики, різко збільшує вартість програмного продукту, знижується експлуатаційна надійність, збільшується вартість робіт по метрологічній атестації систем і робіт по технологічному оснащенню штампами, пресформами. Рішення вказаних задач можлива тільки при використанні в основному датчиків з одним принципом роботи для контролю великої кількості параметрів, на основі одного або декількох базових первинних перетворювачів з одним принципом роботи. Найбільш перспективним для побудови базового перетворювача є використання фізичного ефекту взаємодії електромагнітних полів, які формуються в феромагнітному магнітопроводі, з матеріалом конструкції, в цьому випадку стає можливим реалізувати відомі достоїнства електромагнітних датчиків: функціональна гнучкість, що забезпечує контроль великої кількості параметрів, експлуатаційна надійність, варіація початковим рівнем вихідного електричного сигналу, пряма сумісність з функціональними електронними пристроями, що дозволяє безпосередньо одержувати частотно-часовий сигнал, наприклад, частоту або період, а отже відпадає необхідність застосування таких традиційно необхідних блоків, як уніфіковані вимірювальні перетворювачі, формувачі змінного струму збудження, перетворювачі напруга - частота. Відомо, що індуктивність електромагнітних датчиків визначається як фізикомеханічними параметрами матеріалу контрольованих конструкцій, так і геометричними параметрами, наприклад, однорідністю матеріалу, концентрацією механічних напруг, величиною механічних 75876 6 напруг, магнітною проникністю, електропровідністю, хімскладом, товщиною захисних покрить, вібрацією конструкцій з їх зміщенням і іншими. Ця обставина робить електромагнітні датчики найперспективнішими, особливо у складі ВІС. Відома трьохканальна електромагнітна мультиплікована ВІС переміщень, кожний з трьох її ідентичних вимірювальних каналів містить послідовно з'єднані: індуктивний датчик із стержневим магнітопроводом, вимірювальний уніфікований перетворювач, пристрій порівняння, електромагніт; всі пристрої порівняння випусками з'єднані з синхронним двигуном, а всі випуски електромагнітів з'єднані з пристроєм реєстрації. [Куликовський К.Л., Купер В.Я. Методи і засоби вимірювань. Навчальний посібник для вузів. - М.: Енергоатомвидав, 1986, с.274]. При використанні ВІС індуктивні датчики конструктивно скріплюються сердечниками з однією частиною конструкції, а обмотки індуктивності - з другої частини конструкції. Виникнення зміщення однієї з частин, або обох, змінює відносне положення обмотки-ок індуктивності відносно осердядь змінюється індуктивність вимірювальної обмотки-ок, на її виході змінюється сигнал, в результаті на виході пристрою порівняння формується сигнал розбалансу, який відображається на стрічці самописця з одночасною відміткою номера каналу. Відома ВІС має достоїнства: вона не вимагає застосування пристрою блоків комутації виходів датчиків, застосування однотипних датчиків з одним принципом роботи робить ВІС простою і доступною за ціною. Однак відома ВІС має суттєві недоліки: обмежену область практичного застосування, тому що можливий контроль тільки одного параметра зміщення, крім того її точність контролю невисока, тому що конструктивне виконання датчиків не дозволяє перед вимірюванням контрольованого параметра проводити контроль його функції перетворення, одержаної при таруванні, наприклад на основі контролю початкової величини індуктивності. Відома узагальнена структурна схема побудови ВІС для контролю різних фізичних параметрів об'єктів, яка складається з сукупності вимірювальних каналів, кожний канал містить конкретний датчик, призначений для контролю конкретного параметра, випуск датчика кожного каналу ввімкнений до входу системного комутатора, вихід якого ввімкнений до входу окремо мого уніфікованого вимірювального перетворювача, який загальним виходом ввімкнений до входу ланцюга, який складається з послідовно з'єднаних між собою аналогово-цифровим перетворювачем, каналом зв'язку, обчислювального пристрою, засіб відображення інформації і обчислювальний пристрій ввімкнені в системний комутатор і в блок банка даних, а блок банка даних ввімкнений у обчислювальний пристрій; аналогово-цифровий перетворювач, системний комутатор, засіб відображення інформації з'єднані з автономним пультом керування. [Куликовський К.Л., Купер В.Я. Методи і засоби вимірювань. Навчальний посібник для вузів. - М.: Енергоатомвидав, 1986, с.239]. 7 75876 8 При використанні ВІС, датчики з різними первід, на якому розташовані симетрично попарно винними перетворювачами встановлюються на основні котушки індуктивності і додаткові, полюс, контрольованому об'єкті в різних місцях, вимірюповернутий до контрольованого матеріалу, виковальна інформація у вигляді великої кількості фінаний сферичної форми. [Герасимов В.Г., Останін зичних величин перетворюється первинними пеЮ.Я. і ін. Неруйнівний контроль якості виробів ретворювачами і відповідними уніфікованими електромагнітними методами. -М.: Енергія, 1978, вимірювальними перетворювачами і за допомогою стор.165, 1978]. системного комутатора вмикається в аналоговоПри використанні у складі ВІС контрольований цифровий перетворювач і надходить в канал зв'япараметр визначається по змінюванню індуктивзку, з виходу каналу зв'язку у вигляді кода вимірюності однієї з диференціально ввімкнутих пар або вальна інформація надходить на випуск обчислюпо вихідному сигналу з додаткової пари котушок вального пристрою, де відбувається її обробка, індуктивності, на основі попередньо побудованої обчислювальний пристрій здійснює безперервний залежності змінювання вибраного параметру кообмін інформацією з блоком банка даних, в якому тушок індуктивності від контрольованого параметзберігаються початкові коефіцієнти, задані норми, ра, наприклад, від товщини покрить. оперативна інформація і т.д., результати обробки Відома тестова ВІС для контролю переміщень, надходять на засіб відображення інформації; прояка містить сукупність однотипних вимірювальних грамне керування системою, комутатором, аналоканалів, які містять ідентичні електромагнітні датгово-цифровим перетворювачем, засобом відочики, кожний з яких складається з диференціальбраження інформації здійснюється ного індуктивного первинного перетворювача сообчислювальним пристроєм або автономно з леноїдного типу з рухомим феромагнітним пульту керування. осердям, на якому розташований каркас з двома Відома ІВС має достоїнства, її структура побуосновними котушками індуктивностей і додатковидови відпрацьована і сумісна з датчиками з різним ми двома котушками індуктивностей, розташовапринципом роботи. них на тому ж каркасі і зміщених відносно основОднак відома структура побудови ВІС має і них котушок, магнітопровід і каркас виконані суттєві недоліки: в її структурі побудови відсутні рухомими відносно один одного, випуски всіх коконтрольні канали початкових параметрів первинтушок ввімкнені у входи системного комутатора, них перетворювачів датчиків, тому функція перетякий ввімкнений у вхід послідовно з'єднаних між ворення датчиків в процесі експлуатації не контсобою - перетворювачем індуктивності котушок в ролюється, що різко знижує достоїнства відомої частотно-часовий параметр, лінією зв'язку, аналоструктури побудови ВІС, крім того, вартість відомої гово-цифровим перетворювачем, обчислювальсистеми висока, тому що в її склад входять дорогі ним пристроєм [К.Л., В.Я.Купер. Методи і засоби уніфікувальні вимірювальні перетворювачі, а при вимірювань. Навчальний посібник для вузів. - М.: використанні в її складі електромагнітних датчиків Енергоатомвидав, 1986, с.373], прототип ВІС, провиникає необхідність включення в її склад додаттотип первинного перетворювача. кових блоків формування змінного струму і джерел При використанні ВІС датчики встановлюють живлення, система стане ще дорожча, тобто сисна контрольованому об'єкті , наприклад, під час тема мало доступна за ціною користувачу і найконтролю відносного зміщення двох конструкцій суттєвіший недолік відомої системи - вона практимагнітопровід первинного перетворювача скріпчно не може бути використана для контролю люють з однією конструкцією, а каркас з котушканапружено-деформованого стану інженерних ми - з другою конструкцією, котушки почергово за конструкцій і об'єктів із-за відсутності датчиків кондопомогою комутатора вмикають в перетворювач тролю різних фізичних і геометричних параметрів, індуктивностей котушок в частотно-часовий параякі використовують один принцип роботи і модуметр, з якого вихідний сигнал передається в лінію льну їх побудову на основі одного базового перзв'язку, потім в аналогово-цифровому перетворювинного перетворювача. вачі перетворюється в код, який надходить у обчиУ складі відомих електромагнітних ВІС можуть слювальний пристрій, де обробляється по алгорибути використані електромагнітні датчики матричтму і в необхідній формі відображається у пристрої ного типу, які містять по декілька магнітопроводів. відображення. Відомий електромагнітний датчик для контроВідома ВІС у складі з електромагнітними датлю механічних напруг, який містить три паралельчиками має достоїнство: вона дозволяє знімати но розташованихвідносно один одного магнітопсигнали з диференціальних датчиків як в режимі роводи, на яких розташовані котушки індуктивності зустрічного ввімкнення пар котушок, так і з окре[Авторське свідоцтво СРСР №223433, Кл. 42 к, мих котушок, що дозволяє використовувати тесто45/03, Бюлетень №24, 1968]. ві методи обробки сигналів, наприклад, у відомій При використанні у складі ВІС контрольований системі величина зміщення «X» може бути розрапараметр визначається по змінюванню індуктивхована за формулою ності або магнітного потоку основної котушки, розX=Ω{Ν1-Ν2)/[(Ν3-Ν4)-{Ν1-Ν2)}, ташованої на середньому магнітопроводі, або по де N1,2; N3,4 - відповідно коди значень індуктивихідному сигналу вторинної котушки, на основі вностей основних і додаткових котушок, Ω - велипопередньо побудованої залежності зміни парамечина зміщення пар диференціальних котушок відтра котушки від механічних напруг. носно торця магнітопроводу, це забезпечує високу Відомий електромагнітний датчик для контроточність системі, крім того, застосування перетволю фізико-механічних і геометричних параметрів рювача індуктивності в частотно-часовий сигнал матеріалів, який містить стрижневий магнітопродозволяє вилучити із складу ВІС такі блоки як за 9 75876 10 давальний генератор, уніфікуючий перетворювач, На Фіг.8 - пристрій для контролю величини і що знижує вартість відомої ВІС. напрямку зміщення ґрунтів. Однак відома ВІС у складі з відомим електроНа Фіг.9 - пристрій для контролю напрямку і магнітним датчиком має суттєві недоліки: конструвеличини зміщень від нахилу конструкцій. ктивне виконання обмоток, коли котушки одного На Фіг.10 - пристрій для контролю величини і диференціального перетворювача частково намонапрямку зміщень двох конструкцій відносно один туються на котушки додаткового диференціальноодного. го перетворювача, викликає складну взаємодію На Фіг.11 - датчик для контролю тиску. полів котушок як між собою, так і з магнітопровоРозроблена ВІС містить велику кількість модом, тому відтворення вихідної характеристики дулів М1; М2...MN-1; MN, електромагнітних датчиків електромагнітного перетворювача буде невисока, Д1, Д2...Дn-1; Дn (Фіг.1), на Фіг.1 показані модуль М1 крім того, конструкція звичайного соленоїдного з електромагнітним датчиком Д1 для контролю датчика не дозволяє в процесі контролю зміщення механічних напруг і датчик Д2 для контролю одконтролювати і початкові параметри перетворюнорідності матеріалу, а також модуль ΜΝ, який вача, наприклад, магнітну проникність магнітопромістить у своєму складі електромагнітний датчик воду, що знижує точність контролю ВІС, цільове Дn-1 для контролю пластичних механічних напруг призначення ВІС тільки для контролю зміщень " n", і датчик Дn для контролю зміщень кожний різко обмежує і область її практичного застоелектромагнітний датчик Д містить мінімум один сування. базовий первинний індуктивний перетворювач БП Задача винаходу - одержання технічного ре(Фіг.1, 2) диференціального типу, який складається зультату, який приводить до підвищення точності з циліндричного магнітопроводу 1, на якому розелектромагнітної ВІС з індуктивними первинними ташована діелектрична втулка 2 з зовнішньою перетворювачами і розширення області її практинарізкою, на якій симетрично по довжині розташочного застосування. вані два каркаси 3, 4 з ідентичними парами основТехнічний результат досягається тим, що всі них котушок індуктивностей 5, 6, які складаються з електромагнітні датчики, призначені для контролю котушок 51, 52 і 61, 62, циліндрична втулка 2 і магнірізних фізичних і геометричних параметрів, вклютопровід 1 виконані з можливістю поворотночають в свій склад мінімум один базовий первинпоступального переміщення відносно один одного, ний індуктивний перетворювач з додатковою контв центрі діелектричної втулки 2 на нарізці розтарольною котушкою, яка ввімкнена в додатковий шовані дві рухомі феромагнітні шайби 7, 8, в наперетворювач індуктивності в частотно-часовий прямку поздовжньої осі симетрії виконані наскрізні сигнал і разом створюють додатковий контрольний отвори нарізкою 9, поздовжній отвір 9 створює в канал, число яких у складі ВІС рівне числу базових циліндричному магнітопроводі 1 стінку, товщина первинних індуктивних перетворювачів. 1 якої "Δ" відповідає умові " " , де ; Порівняльний аналіз розробленого технічного f 0 рішення з прототипом показує, що воно відрізнявідповідно магнітна проникність і електропровідється тим, що в структурі побудови електромагнітність матеріалу магнітопроводу, 1, 0 - магнітна ної ІВС для контролю параметрів напруженопроникність вакууму, f - частота імпульсів, які продеформованого стану інженерних конструкцій виходять через котушки індуктивностей, в центрі користовуються електромагнітні датчики, кожний з поздовжнього отвору 9 розташована феромагнітна яких включає у свій склад мінімум один базовий шайба 10 і контрольна котушка індуктивності 11 на первинний індуктивний перетворювач з додаткокаркасі 12, основні котушки 5, 6 і контрольна котувою контрольною котушкою, яка створює разом з шка індуктивності 11 випусками ввімкнені в комудодатковим перетворювачем індуктивності в частатори котушок 13, 14, Фіг.1, які з'єднані, з основтотно-часовий сигнал додатковий контрольній каними перетворювачами 15, 16 індуктивностей нал, число яких у складі ВІС рівне числу базових котушок 5, 6, 11 в частотно-часовий параметр, які первинних індуктивних перетворювачів, тобто розз'єднані виходом з входом центрального комутароблене технічне рішення має елементи новизни. тора 17, вихід якого ввімкнений в ланцюг з посліПри пошуку в науково-технічних та патентних довно з'єднаних між собою: лінією зв'язку 18, анаджерелах не виявлені технічні рішення, які містять логово-цифровим перетворювачем 19, відмітні ознаки. обчислювальним пристроєм 20, засобом відобраНа Фіг.1 наведена структурна схема побудови ження інформації 21; обчислювальним пристроєм електромагнітної ВІС неруйнівного контролю па20 з'єднані з блоком даних 22, а блок даних 22 раметрів напружено-деформованого стану інжез'єднаний з обчислювальним пристроєм 20; аналонерних конструкцій і споруд. гово-цифровий перетворювач 19, засіб відобраНа Фіг.2 показана конструкція базового перження інформації 21 і центральний комутатор 17 винного індуктивного перетворювача. з'єднані з автономним пультом керування 23; виНа Фіг.3 показані конструкції електромагнітнопуски котушок 51, 52, 61, 62, 11 з'єднані з автономго датчика для контролю механічних напруг. ним розніманням 24. На Фіг.4 показаний графік залежності попереОсновні котушки індуктивностей 5,6... з комучних деформацій від механічних напруг. татором 13 кожного базового перетворювача і пеНа Фіг.5 показаний датчик для контролю мехаретворювачем індуктивності 15 створюють вимінічних напруг в неферомагнітних матеріалах. рювальні канали ВК, котушки індуктивності 11, На Фіг.6 - датчик контролю однорідності фекомутатор 14, перетворювач 16 створюють додатромагнітних матеріалів. кові контрольні канали КК. Конструкція електромаНа Фіг.7 - датчик контролю деформацій. 11 75876 12 носно один одного на величину Ω, магнітопроводи гнітного датчика контролю механічних напруг Д 1 виконані з можливістю зміщення в отворах (Фіг.3) складається з трьох БП (Фіг.2) скріплених 52; 53. між собою в одній площині, з одної сторони в магПристрій для контролю величини і напрямку нітопроводі 1 вкручені полюса 25 сферичної форзміщень конструкцій відносно один одного ми, магнітна проникність яких мінімум на порядок (Фіг.10а,б) містить порожнистий кубічний корпус менше проникності магнітопроводу 1, каркаси з 54, в трьох ортогональних площинах якого виконавтулками БП нерухомо закріплені на магнітопроні по два отвори, в які вставлені діелектричні втулводах 1. На Фіг.4 показаний графік зміни поперечки 2 з каркасами 3 базових перетворювачів (Фіг.7) них деформацій від величини механічних напруг в кожній парі каркаси 3, 4 зміщені торцями відносз двома екстремальними значеннями 1, 2 но один одного на величину Ω, всередині корпусу [В.А.Кузьменко. Нові схеми деформування твер54 встановлений якір 55, кінець якого розташовадих тіл. Видавництво "Наукова думка". Київ.-1973. ний в корпусі 54, виконаний у формі порожнистого с.30]. куба 56, в трьох ортогональних його площинах в Спосіб визначення виникнення пластичних стінках виконані парами отвори симетрично отводеформацій полягає в тому, що на поверхні контрам у корпусі 54, в які вкручені магнітопроводи 1 ролюємого матеріалу 26 закріплюють мінімум в базових первинних перетворювачів БП (Фіг.10б) двох перпендикулярних напрямках (Фіг.1) по одмагнітопровід 1 виконані з можливістю зміщення ному Д (Фіг.3), фіксують початкові вихідні парамевідносно один одного у напрямку взаємно перпентри, потім фіксують Д з першим екстремумом видикулярних осей X, У, Z в втулках 2. хідного параметру, потім фіксують виникнення в Конструкція датчика Др тисків (Фіг.11) складацьому Д другий екстремум, тобто виникнення ється із діелектричного кубічного корпуса 57 в пластичних деформацій в матеріалі 26. трьох ортогональних площинах якого виконані Спосіб контролю механічних напруг в матеріаотвори 58, в яких закріплені попарно каркаси 3 лах (Фіг.5), наприклад, в бетоні, полягає в тому, базових БП (Фіг.2), зміщені в кожній парі на велищо на поверхні матеріалу 26 закріплюються фечину Ω, на ортогональних поверхнях куба 57 закріромагнітна плівка у центрі форми кола 27 з прямоплені пружні пластини 59 з отворами, виконаними кутними променями 28-31, виконаних під кутом 90, симетрично отворам в корпусі 57, в яких розташона яких перпендикулярно до їх повздовжніх осей вані магнітопроводи 1 базових БП з можливістю встановлені мінімум два датчика Д (Фіг.3), під купоздовжнього зміщення, на пластинах 59 закріптом 90°. лені жорсткі пластини 60 з отворами 61, розташоКонструкція датчика Д контролю однорідності ваними не наскрізь, в які вкручені магнітопроводи матеріалу 26 (Фіг.6) складається із БП (Фіг.2), в 1 БП, з отворів 58 із сторони, протилежної пластимагнітопроводі 1 якого з обох кінців вкручені сфенам 60 виходять виводи котушок 5, 6, 11. ричні полюса 32, в яких в напрямі осі БП виконані Розроблені датчики Д мають особливості: виотвори 33, діаметр сферичної частини полюсів 32 конання в БП магніто проводу 1 (Фіг.2) з товщиною dп дорівнює діаметру dш феромагнітних шайб стінки Δ дозволяє уникнути впливу котушок 5, 6, (Фіг.2). Конструкція Д контролю деформацій (Фіг.7) 11, застосування в датчику Д трьох БП дозволяє складається із двох скріплених між собою в одній отримати направлений інформаційний потік Ф 2, а площині перетворювачів БП1, БП2, наприклад, діесферичні полюса 25 дозволяють виключити вплив лектричними пластинами 34, 35, на магнітопровонахилів магнітопроводів 1 відносно поверхні матедах 1 БП закріплені ідентичні пари каркасів (Фіг.2), ріалу 26 (Фіг.3). Застосування в способі контролю зміщені відносно торців магнітопроводів 1 на вемеханічних напруг (Фіг.5) датчиків Д розташоваличину Ω. них на окремих прямокутних плівках 28-31 дозвоПристрій для контролю величини і напрямку ляють виключити вплив датчиків Д між собою. В зміщення ґрунтів (Фіг.8) складається з несучої меконструкції датчика До використані два сферичні талевої труби 36, закріпленої в корінній породі 37, полюси 32, 36 (Фіг.6) з отворами, що дозволяє в якій перпендикулярно до її осі виконано мінімум локалізувати зону контролю. Конструкція датчика два отвори 38, 39 у напрямку двох взаємно перпеД контролю деформацій використані два БП, що ндикулярних площин, в яких закріплені діелектридозволяє виключити взаємодію котушок між собою чні трубки 40, 41, кінці яких виконані у формі базо(Фіг.7). В конструкції датчиків Дг контролю зміщень вих перетворювачів БП1...БП4 магнітопроводів ґрунтів (Фіг.8) використані пружні пластини 44, 45 яких прикріплені феромагнітні пластини 42, 43, між (Фіг.8), це дозволяє знизити вплив на результати пластинами 42, 43 закріплені пружні пластини контролю високочастотних коливань ґрунтів. Конс44, 45. трукція датчика Дс (Фіг.9) контролю зміщень від Конструкція пристрою для контролю величини нахилу використано попарне розташування БП в і напрямку зміщень конструкцій від нахилу (Фіг.9), якорі 49, що дозволяє одержувати незалежні інмістить несучий корпус 46, до верхньої кришки 47 формаційні сигналів "U" в напрямі осей .В конструякого прикріплена підвіска 48 з циліндричним покції датчика (Фіг.10) Дск контролю зміщень двох рожнистим якорем 49, в стінках якого мінімум в конструкцій відносно один одного магнітопроводи двох взаємно перпендикулярних напрямках симе1 БП і котушки індуктивності БП закріплені окремо, трично по висоті виконано по два отвори 50, 51, в що дозволило одержувати незалежні інформаційні яких встановлені магнітопроводи 1 базових перетсигнали "U" по осям Χ, У, Ζ. Визначення напряму ворювачів, симетрично яким в корпусі 46 виконані параметрів U ;Uс; Uск датчиками Д ; Дс; Дск пояснює отвори 52, 53, в яких закріплені втулки 2 з каркасхема на Фіг.12. Принцип роботи всіх датчиків Д сами 3, 4 (Фіг.2) каркаси в кожній парі зміщені відспільний: зміна індуктивності при зміні параметрів, 13 75876 14 згідно (Г.І.Шевченко. Магнітоізотропні датчики. М. роводів відносно нейтрального положення; d0; d1; Енергія, с.6). Наприклад, для індуктивності магніd2 - параметри функції перетворення базового тоізотропних датчиків запишемо: індуктивного перетворення, одержані при його таруванні в лабораторних умовах; спочатку контW2 S , L0 ролюються початкові параметри базових перетвоl рювачів, для цього контрольна котушка індуктивде W - число витків обмотки, І, S - відповідно ності шляхом комутатора котушок вмикається у довжина і площа поперечного перерізу магнітного контрольний перетворювач індуктивності в частоланцюга; - магнітна проникність матеріалу магнітно-часовий параметр, сигнал з якого через тного ланцюга. Магнітна проникність змінюється центральний комутатор надходить на аналоговона величину Δ при виникненні в матеріалі механіцифровий перетворювач, з якого на обчислювальчних напружень , тому змінюється і індуктивність ний пристрій надходить код Nj=С0+C1Lj, де Lj - інL0 обмотки на величину дуктивність j-ϊ контрольної котушки, С0 і С1 - параметри функції перетворення індуктивності в код, у W 2S L L0 L L0 (L0 ) , обчислювальнім пристрої визначається значення і l зрівнюється з еталонним значенням, яке зберігаТаким чином по зміні ΔL можна контролювати ється у банку даних. Якщо виконується рівність, то механічні напруження. параметри магнітопроводів базового перетворюВиключно великий вплив на величину індуктивача, насамперед значення магнітної проникності, вності котушок, які вміщують магнітний ланцюг, відповідають значенню, прийнятому при таруванні. чинить виникнення або зміна повітряного зазору у Після цього комутатором котушок 13, 14 і центрамагнітному ланцюгу у формі кільця, індуктивність льним комутатором 17 по черзі на лінію зв'язку 18 котушки визначається формулою передаються сигнали про стан значень індуктив2 W L ності, які з виходу аналогово-цифрового перетво, Zм Z б рювача 19 передаються у обчислювальний приде Zм, Zб - відповідно магнітний опір магнітного стрій 20, де визначаються на основі чотирьох ланцюгу і повітряного зазору, таким чином за змізначень кодів N1; N2; N3; N4 і величини зміщення ною L котушки можна контролювати зміни повітряміж каркасами Ω і торцем магнітопроводів 1, по ного зазору, наприклад від зміщення часток магніяким визначаються значення зміщень X між двома тного ланцюгу (Р.М.Демидова-Панферова, частинами контрольованої конструкції, наприклад, В.Н.Малиновский, Ю.С.Солодов. Задачи и примерозкриття тріщини. Одержувані в процесі контроры расчетов по электроизмерительной технике. лю значення заносяться в банк даних 22 і при неУчебное пособие для ВУЗов - М.: Энергоатомизобхідності відтворюються на пристрої 21 відобрадат, 1990. - 192с., с.17). ження інформації в потрібному вигляді, наприклад, Залежність магнітної проникності μ матеріалів у формі графіка, таблиці або потрібного числового магнітного ланцюгу від фізико-механічних парамезначення, на основі розрахунку в обчислювальнім трів: твердості, вологості, хімскладу, дефектного пристрої 20. стану і інших дозволяє по зміні індуктивності котуПри використанні ВІС в автономному режимі шки робити висновки по величині цих параметрів. випуски датчиків вмикаються в рознімання 24, до При використанні електромагнітної ІВС електяких по черзі вмикається електронний автономний ромагнітні датчики Д1...Дn спочатку калібрують, на пристрій для зняття і збереження інформації з всіх базових перетворювачах БП шляхом різного електромагнітних датчиків у вигляді вторинної назміщення феромагнітних шайб 7, 8, 10 добиваютьпруги з основних вимірювальних котушок 5, 6 з ся рівностей індуктивностей L (Фіг.2), основних наступним занесенням інформації через інтеркотушок 5, 6, додаткових 11 у одній прийнятій етафейс на стаціонарний комп'ютер, де визначається лонній величині Le, тобто L5.1; L5.2; L6.1; L6.2; L11=Le. величина контрольованих параметрів на основі Заносять в пам'ять обчислювального пристрою 20 раніше одержаних функцій перетворення для кожзначення Le, після калібрування електромагнітні ного електромагнітного датчика. датчики тарують, змінюють величини контрольоРозроблена електромагнітна інформаційнованих параметрів і будують залежності зміни вевимірювальна система у порівнянні з відомими личини індуктивності основних котушок 5, 6 від має значно більшу точність контролю, за рахунок величини контрольованих параметрів, одержані застосування у її складі додаткових контрольних функції перетворення заносять у обчислювальний каналів, які дозволяють контролювати параметри пристрій 20. Через те що всі вимірювальні і контмагнітопроводу електромагнітних датчиків в пророльні канали розробленої ВІС ідентичні, то розгцесі експлуатації і при необхідності їх коригувати лянемо роботу ВІС на прикладі одного каналу, до еталонної величини, прийнятої при таруванні, а наприклад, каналу контролю зміщень X (Фіг.2, 10), також за рахунок тестової обробки сигналів перетпри виникненні зміщення X припустимо, що знаворювачів. чення індуктивностей вимірювальних котушок 5, 6 Реалізація у складі інформаційної системи визначаться відомими виразами: електромагнітних датчиків для контролю різних L5.1=d0+d1(х0+x)+d2(х0-х)2; параметрів, побудованих на основі одного базовоL5.2=d0+d1(х0-х)+d2(x0-x)2; го первинного індуктивного перетворювача, до2 L6.1=d0+d1(x0+x+Ω)+d2(x0+x+Ω) ; зволяє різко знизити вартість системи орієнтовно L6.2=d0+d1(x0-x-Ω)+d2(x0-x-Ω)2; на порядок у порівнянні з відомими системами, а де x0 - нейтральне положення магнітопроводів, отже підвищити її конкурентноздатність. при якому L5=L6; x - величина зміщення магнітопРозроблена вимірювально-інформаційна сис 15 75876 16 тема знайде широке застосування практично у всіх нобудуванні, при випробуванні інженерних консобластях народного господарства, в будівництві, трукцій і споруд і т.д. машинобудуванні, нафтової промисловості, суд 17 75876 18 19 Комп’ютерна верстка Т. Чепелева 75876 Підписне 20 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromagnetic measuring informational system for nondestructive inspection of deflected mode parameters of engineering structures
Автори англійськоюShokarev Viktor Semenovych, Shokariev Viktor Semenovych, Chaplyhin Valerii Ivanovych
Назва патенту російськоюЭлектромагнитная измерительно-информационная система неразрушающего контроля параметров напряженно-деформированного состояния инженерных конструкций и сооружений
Автори російськоюШокарев Виктор Семенович, Чаплыгин Валерий Иванович
МПК / Мітки
МПК: G01M 19/00, G01N 27/90
Мітки: споруд, контролю, неруйнівного, стану, інженерних, напружено-деформованого, параметрів, конструкцій, електромагнітна, вимірювально-інформаційна, система
Код посилання
<a href="https://ua.patents.su/10-75876-elektromagnitna-vimiryuvalno-informacijjna-sistema-nerujjnivnogo-kontrolyu-parametriv-napruzheno-deformovanogo-stanu-inzhenernikh-konstrukcijj-i-sporud.html" target="_blank" rel="follow" title="База патентів України">Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд</a>
Пристрій для безперервного контролю напружено-деформованого стану масиву гірських порід
Номер патенту: 9448
Опубліковано: 30.09.1996
Автори: Бойко Богдан Дмитрович, Вербицький Тарас Зиновійович
МПК: G01V 1/00
Мітки: масиву, стану, порід, гірських, контролю, пристрій, безперервного, напружено-деформованого
Формула / Реферат:
Устройство для непрерывного контроля напряженно-деформированного состояния массива горных пород, содержащее излучатель, соединенный с генератором ультразвуковых колебаний, приемник ультразвуковых колебаний, соединенный с усилителем, и измеритель разности фаз ультразвуковых колебаний, соединенный регистратором, отличающееся тем, что, с целью повышения информативности контроля напряженного состояния путем измерения второй гармоники...
Спосіб контролю напружено-деформованого стану масиву гірничих порід
Номер патенту: 19801
Опубліковано: 25.12.1997
Автори: Кисельов Микола Миколайович, Шкуратнік Владімір Лазарєвіч, Азаров Микола Якович, Шахнова Валентина Митрофанівна
МПК: G01V 3/08
Мітки: порід, масиву, спосіб, напружено-деформованого, гірничих, контролю, стану
Формула / Реферат:
Способ контроля напряженно-деформированного состояния массива горных пород, включающий возбуждение электрического поля в исследуемом массиве при помощи двух питающих электродов и измерение разностей потенциалов парами измерительных электродов, сравнение их с тарированными значениями параметров поля и суждение о напряженно-деформированном состоянии по результатам сравнения, отличающийся тем, что одновременно в каждой точке измерения параметров...
Спосіб неруйнівного контролю напружено-деформівного стану деревини та деревинних листових матеріалів при сушінні
Номер патенту: 23817
Опубліковано: 16.06.1998
Автори: Поберейко Богдан Петрович, Соколовський Ярослав Іванович, Озарків Ігор Мирославович, Бехта Павло Антонович, Озарків Святослав Ігорович
МПК: G01N 21/35
Мітки: матеріалів, спосіб, листових, деревинних, деревини, контролю, напружено-деформівного, сушінні, стану, неруйнівного
Формула / Реферат:
Спосіб неруйнівного контролю напружено-деформівного стану деревини та деревинних листових матеріалів при сушінні, який полягає в тому, що деревину опромінюють плоским поляризованим пучком світла, виділяють в об'єкті (моделі) площину, паралельну пучку поляризованого світла і розташовану на певній віддалі від джерела світла, при якій квазіголовні напруження і їхня орієнтація не змінюються і по інтерференційних картинах визначають параметри...
Електромагнітна система визначення координат інженерних комунікацій
Номер патенту: 45377
Опубліковано: 15.04.2002
Автори: Драбич Петро Петрович, Яворський Ігор Миколайович, Драбич Олег Петрович
МПК: G01R 33/00, G01V 3/10
Мітки: комунікацій, система, інженерних, визначення, координат, електромагнітна
Формула / Реферат:
Електромагнітна система визначення координат інженерних комунікацій, яка складається з ближнього, середнього і дальнього відносно осі комунікації паралельно розміщених на одній осі ідентичних магнітоприймачів, першого, другого і третього пристроїв віднімання, першого і другого вузькосмугових підсилювачів, навушних телефонів, аналого-цифрового перетворювача і цифрового індикатора, в якій вихід ближнього магнітоприймача з'єднаний з першим...
Зразок для дослідження напружено-деформованого стану трубопроводів з локальним стоншенням
Номер патенту: 69955
Опубліковано: 15.09.2004
Автори: Шугайло Олексій Петрович, Крицький Володимир Борисович, Шидловський Микола Сергійович, Шугайло Олександр Петрович, Гарф Едуард Фєофілович
МПК: G01N 3/00
Мітки: напружено-деформованого, стоншенням, дослідження, трубопроводів, зразок, локальним, стану
Формула / Реферат:
Зразок для дослідження напружено-деформованого стану трубопроводів з локальним стоншенням, що містить циліндричну частину з щонайменше одним локальним стоншенням стінки циліндра та приварені до торців циліндра два плоских днища, одне з яких має щонайменше два штуцери, для подачі усередину зразка робочого середовища та приєднання манометра, який відрізняється тим, що локальні стоншення в стінці циліндра виконані у вигляді вирізу, що має форму...
Попередній патент: Спосіб одержання полівінілхлориду
Наступний патент: Прозора підкладка із шаром з похідної кремнію (варіанти)
Випадковий патент: Спосіб добору малоцінних і високоцінних телиць