Супутник дистанційного зондування землі
Номер патенту: 79274
Опубліковано: 11.06.2007
Автори: Добрушина Марина Гаріївна, Кавун Василь Вікторович, Вайсеро Михайло Васильович, Зубенко Володимир Пилипович, Щудро Анатолій Петрович, Дьяченко Едуард Миколайович, Тарасов Геннадій Васильович, Гладілін Віталій Сергійович
Формула / Реферат
1. Супутник дистанційного зондування Землі, стабілізований в орбітальній системі координат, що містить негерметичний корпус, сформований плоскими чотиригранними прямокутними корпусами рамкових модулів забезпечувальних підсистем і торцевими плитами з наскрізними отворами для кріплення стяжками за допомогою гайок у пакет, на якому розміщені прилади підсистеми визначення й керування орієнтацією, сканери та електронні блоки корисного навантаження, антени забезпечувальних підсистем і панелі сонячної батареї, який відрізняється тим, що він обладнаний базисним блоком, установленим у пакеті рамкових модулів, на корпусі якого розміщені і високоточно з'юстировані сканери корисного навантаження разом із приладами підсистеми визначення й керування орієнтацією, та тепловими екранами, розташованими на бічних гранях супутника і прикріпленими до торцевих плит під кутом 45о до граней пакета рамкових модулів.
2. Супутник дистанційного зондування Землі за п. 1, який відрізняється тим, що в корпусах його рамкових модулів базисного блока та у торцевих плитах наскрізні отвори для установки стяжок розташовані по кутах і посередині широких стінок рамок, причому на кожному стику рамкових модулів, базисного блока й плит у двох діаметрально протилежних кутах стяжки охоплені центрувальними втулками, поглибленими в отвори, які розточені в рамкових модулях, базисному блоці та торцевих плитах, що стикуються між собою.
3. Супутник дистанційного зондування Землі за п. 1, який відрізняється тим, що сканери корисного навантаження й прилади підсистеми визначення й керування орієнтацією встановлені зовні й усередині базисного блока, виконаного у вигляді тонкостінної чотиригранної прямокутної рамки, до одного торця якої прикріплена плита з підкосами, а до іншого - плоска стрижнева ферма, причому зовні корпусу сканери й прилади прикріплені до плити і розміщені в кутових зонах між гранями пакета рамкових модулів і тепловими екранами, а усередині корпусу прилади прикріплені до плити, стрижневої ферми та до стінок рамки.
4. Супутник дистанційного зондування Землі за п. 1, який відрізняється тим, що в ньому панелі сонячної батареї розміщені вздовж бічних граней корпусу супутника фотоперетворювачами назовні й прикріплені до плити торцевої за допомогою поворотних механізмів.
Текст
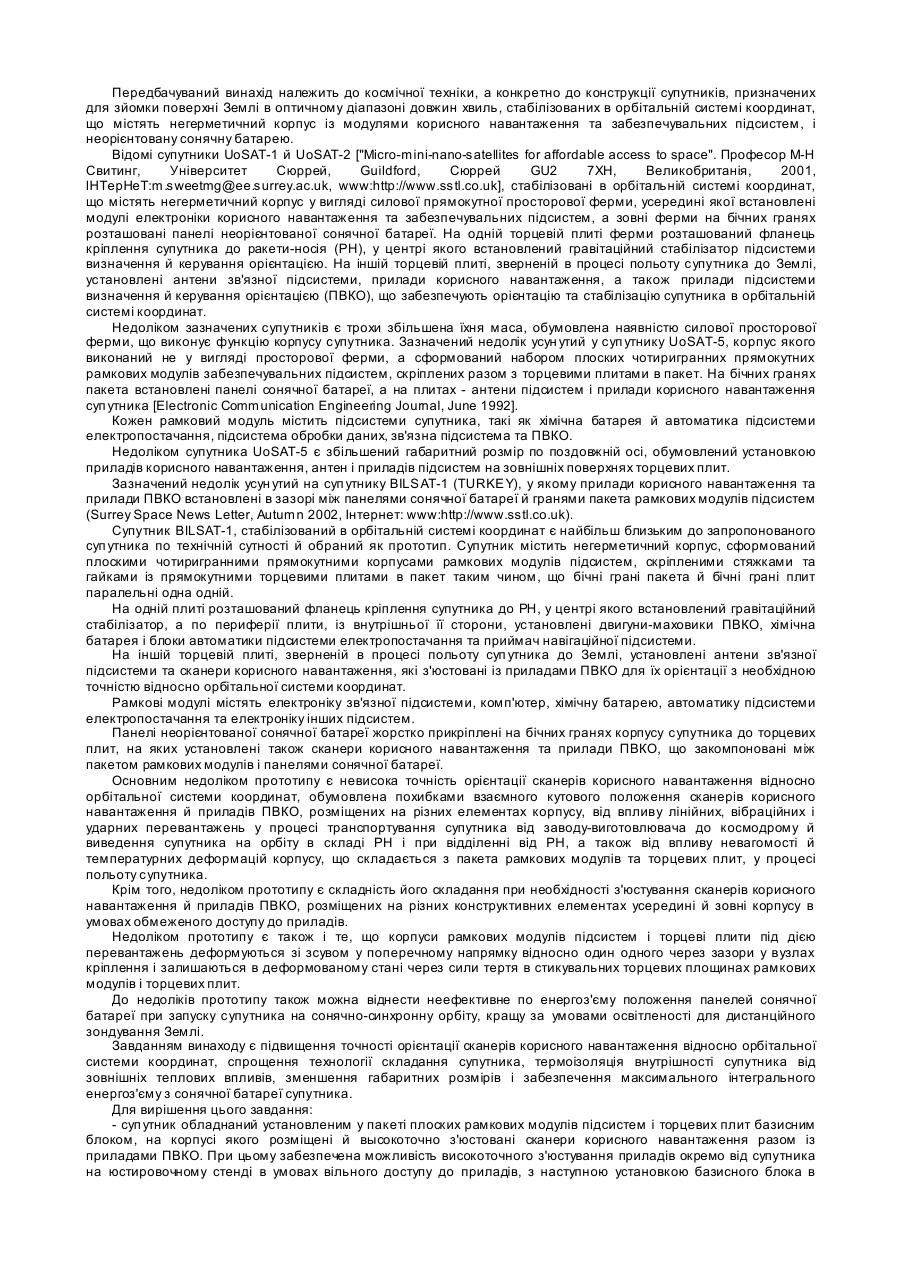
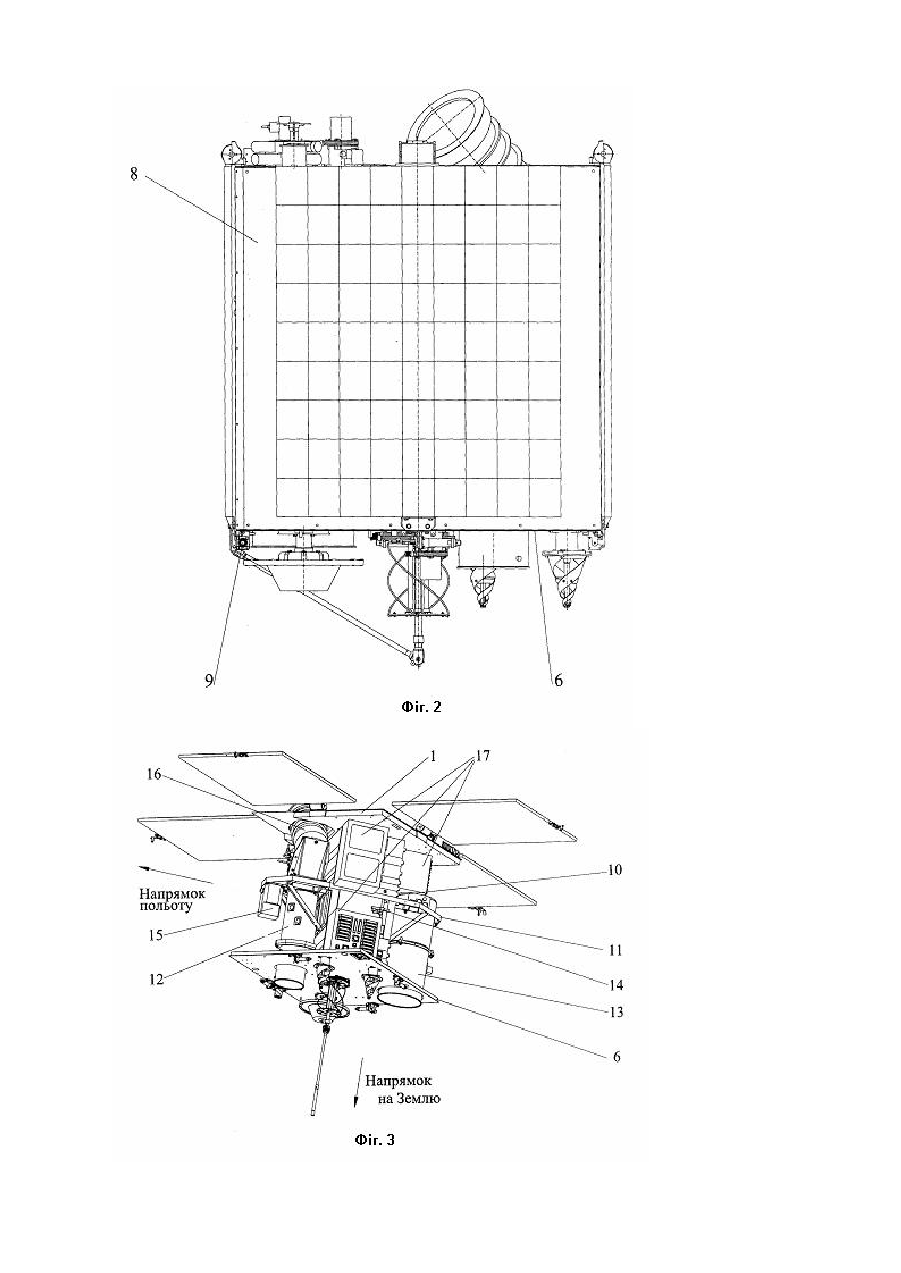
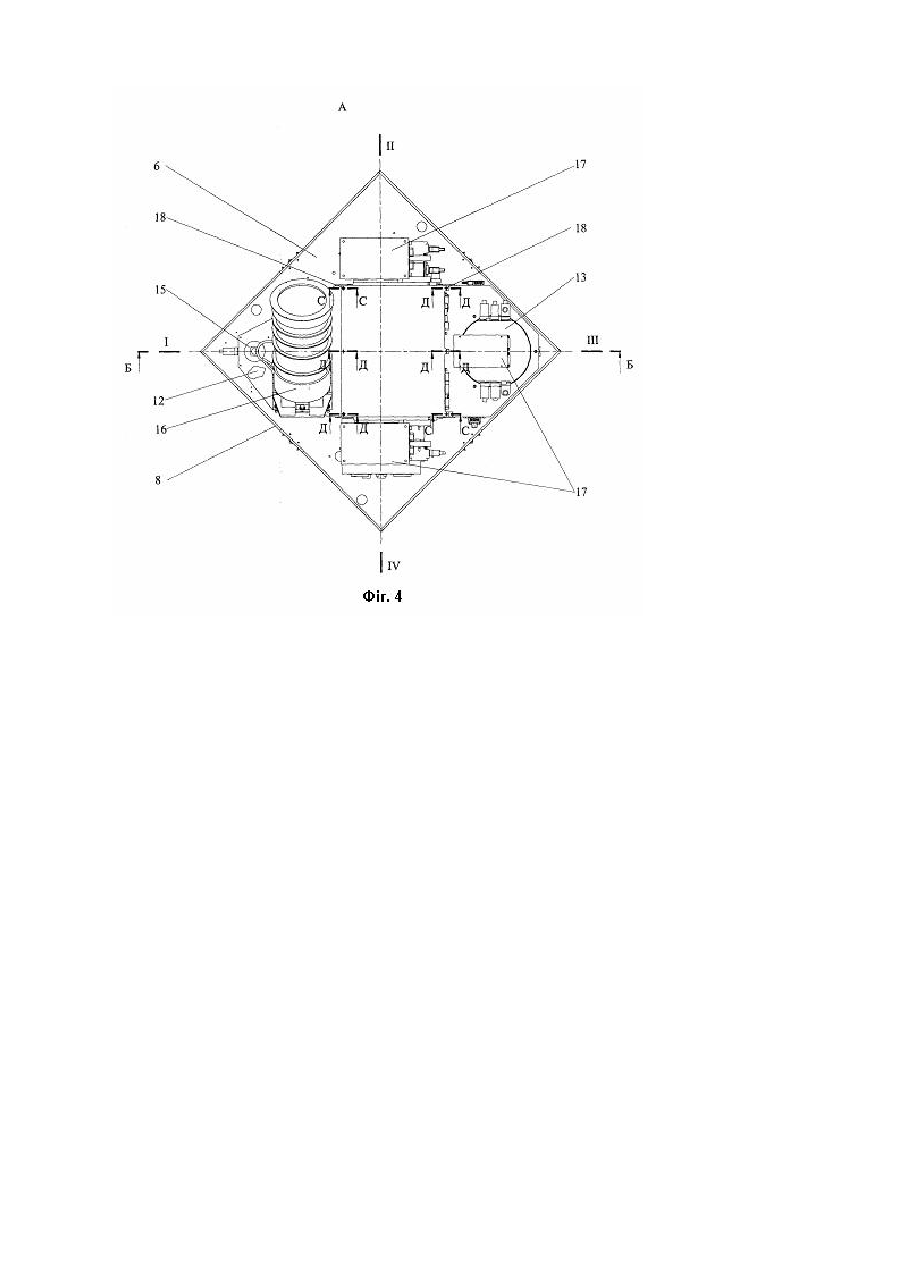
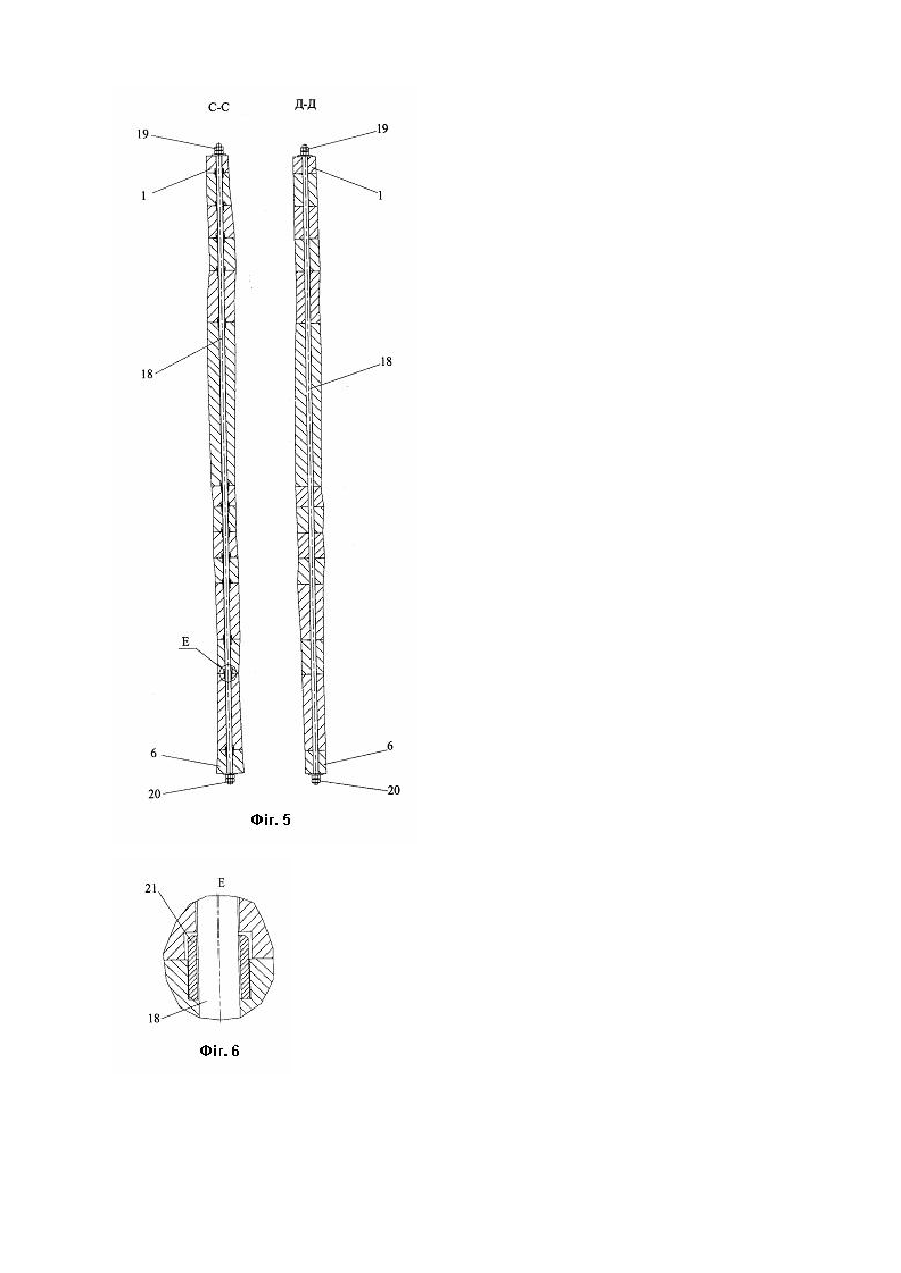
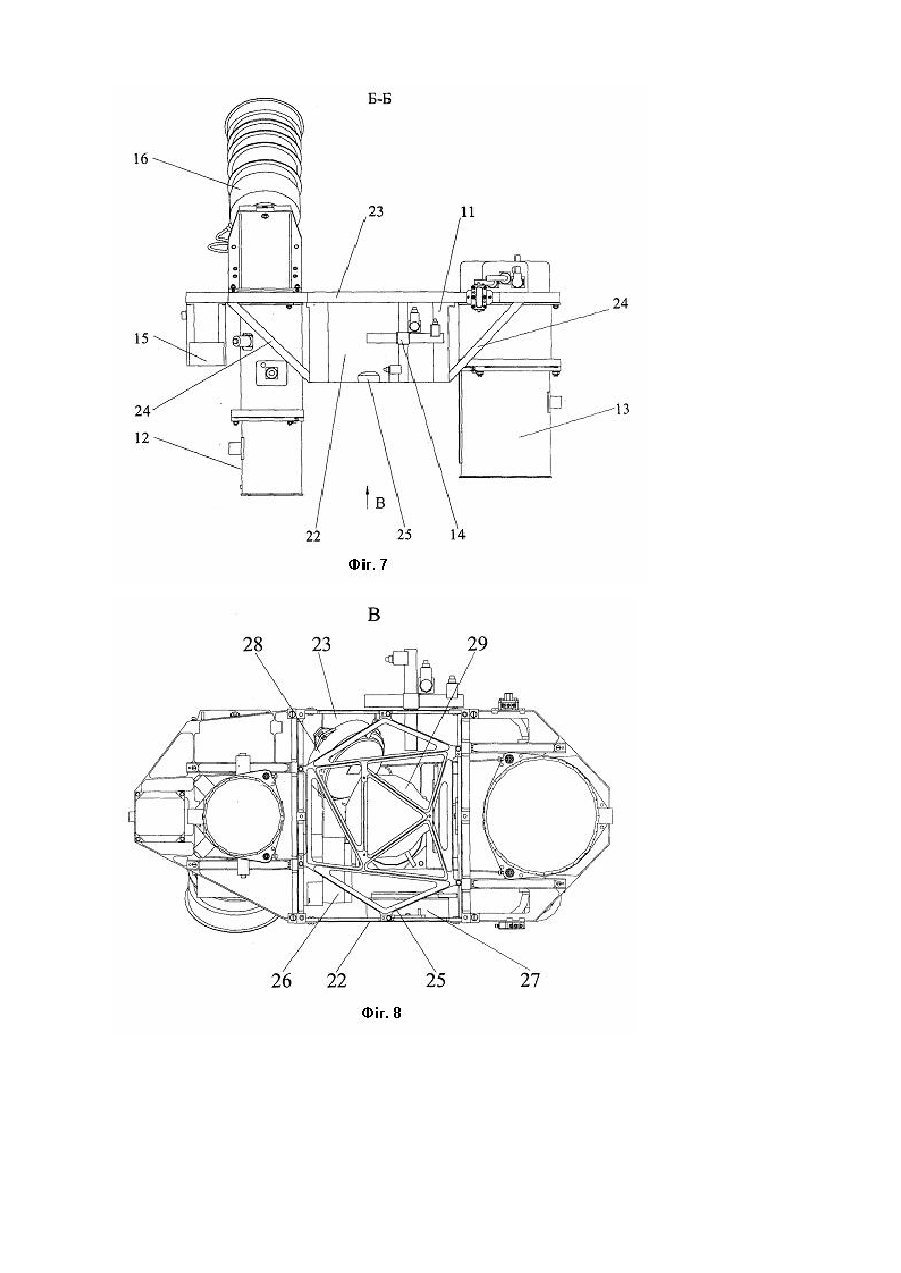
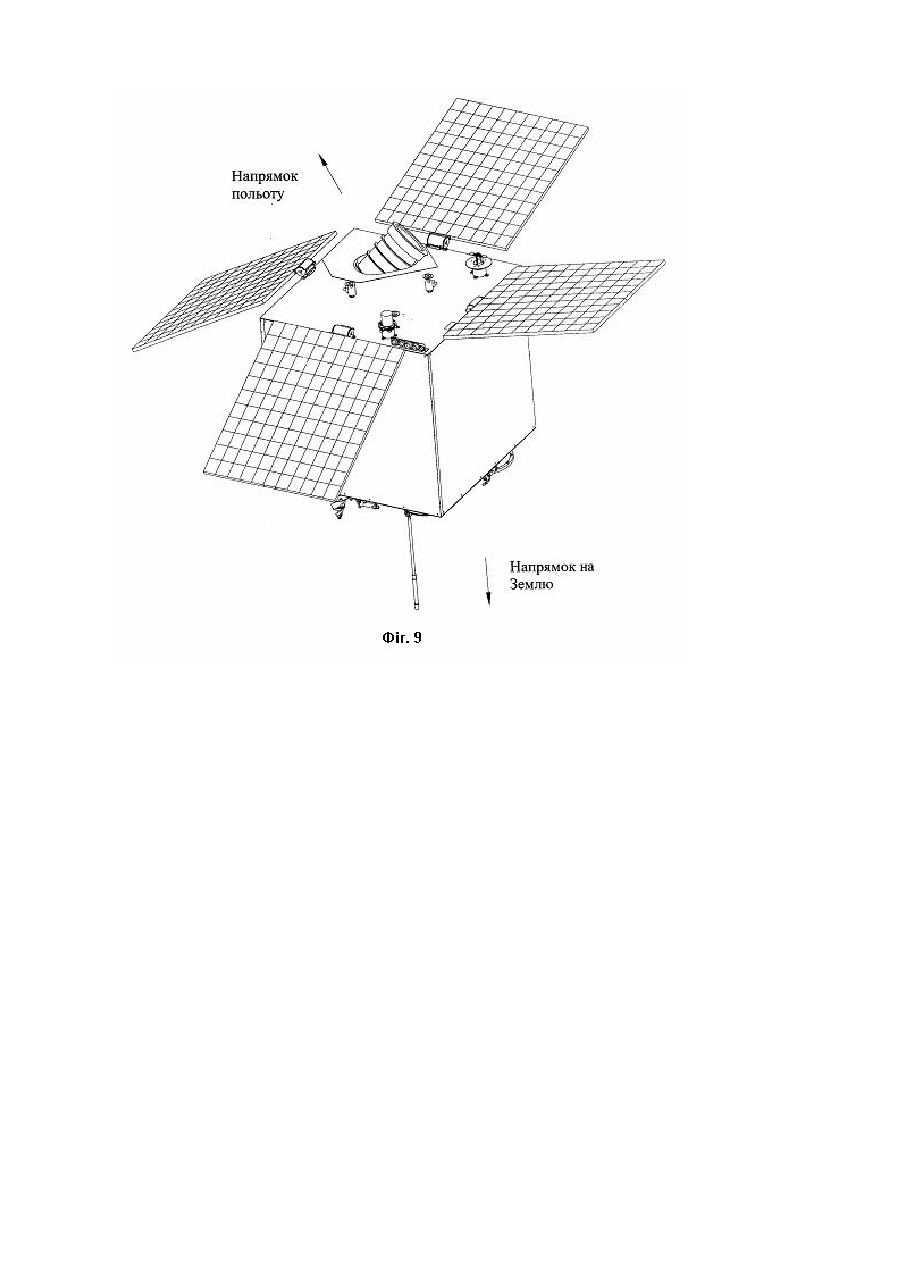
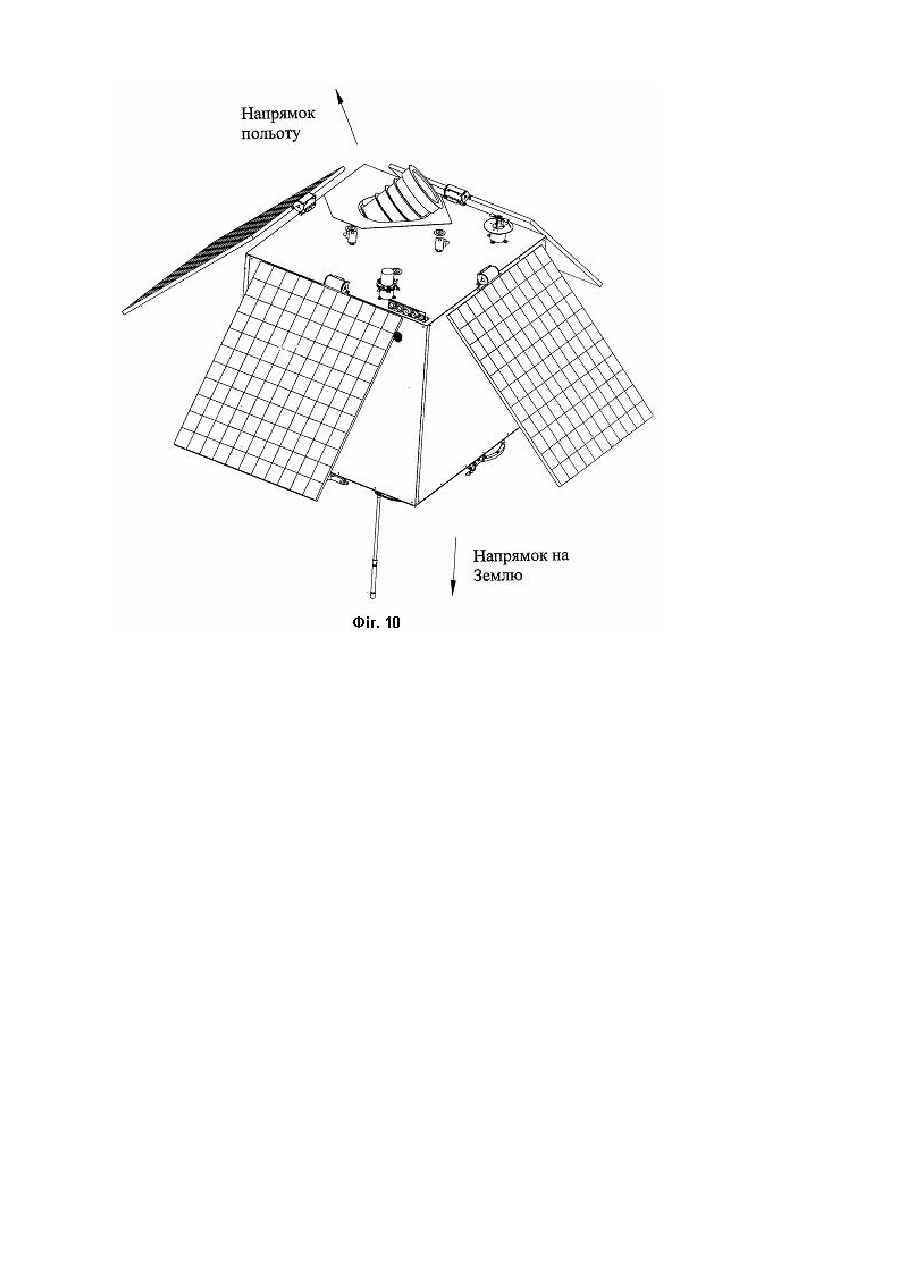
Передбачуваний винахід належить до космічної техніки, а конкретно до конструкції супутників, призначених для зйомки поверхні Землі в оптичному діапазоні довжин хвиль, стабілізованих в орбітальній системі координат, що містять негерметичний корпус із модулями корисного навантаження та забезпечувальних підсистем, і неорієнтовану сонячну батарею. Відомі супутники UoSAT-1 й UoSAT-2 ["Micro-mini-nano-satellites for affordable access to space". Професор M-H Свитинг, Університет Сюррей, Guildford, Сюррей GU2 7XH, Великобританія, 2001, lHTepHeT:m.sweetmg@ee.surrey.ac.uk, www:http://www.sstl.co.uk], стабілізовані в орбітальній системі координат, що містять негерметичний корпус у вигляді силової прямокутної просторової ферми, усередині якої встановлені модулі електроніки корисного навантаження та забезпечувальних підсистем, а зовні ферми на бічних гранях розташовані панелі неорієнтованої сонячної батареї. На одній торцевій плиті ферми розташований фланець кріплення супутника до ракети-носія (РН), у центрі якого встановлений гравітаційний стабілізатор підсистеми визначення й керування орієнтацією. На іншій торцевій плиті, зверненій в процесі польоту супутника до Землі, установлені антени зв'язної підсистеми, прилади корисного навантаження, а також прилади підсистеми визначення й керування орієнтацією (ПВКО), що забезпечують орієнтацію та стабілізацію супутника в орбітальній системі координат. Недоліком зазначених супутників є трохи збільшена їхня маса, обумовлена наявністю силової просторової ферми, що виконує функцію корпусу супутника. Зазначений недолік усун утий у суп утнику UoSAT-5, корпус якого виконаний не у вигляді просторової ферми, а сформований набором плоских чотиригранних прямокутних рамкових модулів забезпечувальних підсистем, скріплених разом з торцевими плитами в пакет. На бічних гранях пакета встановлені панелі сонячної батареї, а на плитах - антени підсистем і прилади корисного навантаження суп утника [Electronic Communication Engineering Journal, June 1992]. Кожен рамковий модуль містить підсистеми супутника, такі як хімічна батарея й автоматика підсистеми електропостачання, підсистема обробки даних, зв'язна підсистема та ПВКО. Недоліком супутника UoSAT-5 є збільшений габаритний розмір по поздовжній осі, обумовлений установкою приладів корисного навантаження, антен і приладів підсистем на зовнішніх поверхнях торцевих плит. Зазначений недолік усун утий на суп утнику BILSAT-1 (TURKEY), у якому прилади корисного навантаження та прилади ПВКО встановлені в зазорі між панелями сонячної батареї й гранями пакета рамкових модулів підсистем (Surrey Space News Letter, Autumn 2002, Інтернет: www:http://www.sstl.co.uk). Супутник BILSAT-1, стабілізований в орбітальній системі координат є найбільш близьким до запропонованого суп утника по технічній сутності й обраний як прототип. Супутник містить негерметичний корпус, сформований плоскими чотиригранними прямокутними корпусами рамкових модулів підсистем, скріпленими стяжками та гайками із прямокутними торцевими плитами в пакет таким чином, що бічні грані пакета й бічні грані плит паралельні одна одній. На одній плиті розташований фланець кріплення супутника до РН, у центрі якого встановлений гравітаційний стабілізатор, а по периферії плити, із внутрішньої її сторони, установлені двигуни-маховики ПВКО, хімічна батарея і блоки автоматики підсистеми електропостачання та приймач навігаційної підсистеми. На іншій торцевій плиті, зверненій в процесі польоту суп утника до Землі, установлені антени зв'язної підсистеми та сканери корисного навантаження, які з'юстовані із приладами ПВКО для їх орієнтації з необхідною точністю відносно орбітальної системи координат. Рамкові модулі містять електроніку зв'язної підсистеми, комп'ютер, хімічну батарею, автоматику підсистеми електропостачання та електроніку інших підсистем. Панелі неорієнтованої сонячної батареї жорстко прикріплені на бічних гранях корпусу супутника до торцевих плит, на яких установлені також сканери корисного навантаження та прилади ПВКО, що закомпоновані між пакетом рамкових модулів і панелями сонячної батареї. Основним недоліком прототипу є невисока точність орієнтації сканерів корисного навантаження відносно орбітальної системи координат, обумовлена похибками взаємного кутового положення сканерів корисного навантаження й приладів ПВКО, розміщених на різних елементах корпусу, від впливу лінійних, вібраційних і ударних перевантажень у процесі транспортування супутника від заводу-виготовлювача до космодрому й виведення супутника на орбіту в складі РН і при відділенні від РН, атакож від впливу невагомості й температурних деформацій корпусу, що складається з пакета рамкових модулів та торцевих плит, у процесі польоту супутника. Крім того, недоліком прототипу є складність його складання при необхідності з'юстування сканерів корисного навантаження й приладів ПВКО, розміщених на різних конструктивних елементах усередині й зовні корпусу в умовах обмеженого доступу до приладів. Недоліком прототипу є також і те, що корпуси рамкових модулів підсистем і торцеві плити під дією перевантажень деформуються зі зсувом у поперечному напрямку відносно один одного через зазори у вузлах кріплення і залишаються в деформованому стані через сили тертя в стикувальних торцевих площинах рамкових модулів і торцевих плит. До недоліків прототипу також можна віднести неефективне по енергоз'єму положення панелей сонячної батареї при запуску супутника на сонячно-синхронну орбіту, кращу за умовами освітленості для дистанційного зондування Землі. Завданням винаходу є підвищення точності орієнтації сканерів корисного навантаження відносно орбітальної системи координат, спрощення технології складання супутника, термоізоляція внутрішності супутника від зовнішніх теплових впливів, зменшення габаритних розмірів і забезпечення максимального інтегрального енергоз'єму з сонячної батареї супутника. Для вирішення цього завдання: - суп утник обладнаний установленим у пакеті плоских рамкових модулів підсистем і торцевих плит базисним блоком, на корпусі якого розміщені й высокоточно з'юстовані сканери корисного навантаження разом із приладами ПВКО. При цьому забезпечена можливість високоточного з'юстування приладів окремо від супутника на юстировочному стенді в умовах вільного доступу до приладів, з наступною установкою базисного блока в пакет при складанні супутника. Це дозволяє спростити технологію складання супутника та скоротити тривалість його виготовлення; - суп утник обладнаний тепловими екранами, розташованими на бічних гранях торцевих плит для термоізоляції внутрішності супутника від зовнішніх теплових впливів у процесі його орбітального польоту та, як наслідок, для забезпечення разом з терморегулювальними покриттями мінімальних температурних деформацій корпусу базисного блока та збереження високоточного з'юстування сканерів корисного навантаження й приладів ПВКО; - корпус базисного блоку, виконаний у вигляді тонкостінної чотиригранної прямокутної рамки, до одного торця якої прикріплена плита з підкосами, а до іншого - плоска стрижнева ферма для зменшення залишкових деформацій корпусу базисного блока від впливу перевантажень і невагомості; - корпус базисного блоку, а також корпуси рамкових модулів і торцевих плит виконані з наскрізними отворами, розташованими по кутах рамки й посередині широких стінок рамки для стягування корпусів рамкових модулів разом з базисним блоком і торцевими плитами в пакет різьбовими стяжками та гайками для забезпечення жорсткості корпусу супутника; - на кожному стику пакета з рамкових модулів і торцевих плит у двох діаметрально протилежних кута х стяжки охоплені центрувальними втулками, поглибленими в отвори, що розточені в рамкових модулях, базисному блоці та торцевих плитах для зменшення залишкових деформацій, в тому числі і об'ємних з депланацією площин корпусів базисного блока та рамкових модулів підсистем від поперечного зсуву рамкових модулів, корпусу базисного блока та торцевих плит відносно один одного під впливом перевантажень і збереження високоточного з'юстування приладів; - пакет рамкових модулів повернуто навколо поздовжньої осі супутника таким чином, що його грані становлять із бічними гранями торцевих плит, до яких прикріплені теплові екрани, кут 45° для підвищення щільності компонування приладів і зменшення габаритних розмірів супутника. При цьому сканери корисного навантаження і прилади ПВКО, установлені зовні корпусу базисного блоку, закомпоновані в чотирьох кутових зонах, обмежених гранями пакета, тепловими екранами та торцевими плитами, а усередині корпусу базисного блока прилади прикріплені до його плити, стінок рамки, та до стрижневої ферми; - панелі сонячної батареї, виконані поворотними, розміщені в транспортному положенні уздовж бічних граней корпусу супутника фотоперетворювачами назовні та прикріплені до торцевої плити супутника за допомогою поворотних механізмів, що встановлюють панелі в робоче положення залежно від нахилу орбіти супутника під оптимальними кутами відносно орбітальної системи координат для забезпечення максимального інтегрального енергоз'єму із сонячної батареї. Сукупність нових істотних відмінних ознак і відомих істотних відмінних ознак забезпечує підвищення точності орієнтації сканерів корисного навантаження, спрощення складання супутника, термоізоляцію внутрішності суп утника від зовнішніх теплових впливів, зменшення габаритних розмірів супутника та забезпечення максимального інтегрального знергоз'єму з сонячної батареї супутника. Сутність пропонованого технічного рішення пояснюється кресленнями. На фіг.1 зображений пропонований супутник, що містить плиту основи 1 (торцеву плиту, звернену в процесі польоту суп утника в протилежну від Землі сторону), на якій установлені різьбові втулки 2 для кріплення супутника до пірозамків РН, антени забезпечувальних підсистем 3, і панелі 4 сонячної батареї, прикріплені до плити основи 1 за допомогою поворотних механізмів 5. Панелі сонячної батареї зафіксовані в одній площині, паралельній площині плити основи 1, спрямовані фотоперетворювачами в зеніт. Таке положення сонячної батареї забезпечує, відповідно до проведених розрахунків, максимальний енергоз'єм при запуску суп утника на сонячно-синхронну орбіту з нахилом ~98,08°, при місцевому часі низхідного вузла ~12 годин. На плиті установлювальній 6 (торцевій плиті, зверненій до Землі в процесі польоту суп утника) установлені антени 7 забезпечувальних підсистем. На бічних гранях суп утника розташовані теплові екрани 8. На фіг.2 зображений супутник у транспортному положенні. Панелі сонячної батареї в транспортному положенні розташовані вздовж бічних граней супутника паралельно тепловим екранам 8 фотоперетворювачами назовні й зачековані на плиті установлювальній 6 пірочеками 9. На фіг.3 зображений пропонований супутник без теплових екранів 8. Між плитою основи 1 і плитою установлювальною 6 розміщені рамкові модулі 10 і базисний блок 11, скріплені в пакет. При цьому грані пакета повернуті відносно бічних граней супутника на кут 45°. На базисному блоці 11 установлені та високоточне з'юстовані сканери корисного навантаження 12 і 13 разом із приладами 14, 15, 16 ПВКО. До внутрішньої поверхні плити основи 1 і плити установлювальної 6 прикріплені електронні блоки 17 корисного навантаження. На фіг.4 зображений вигляд А суп утника (фіг.1), на якому плита основи 1 і панелі сонячної батареї 4 з поворотними механізмами 5 не показані. Сканери 12, 13 і електронні блоки корисного навантаження 17, а також прилади ПВКО 15, 16 закомпоновані в чотирьох кутови х зонах, обмежених гранями пакета рамкових модулів, тепловими екранами 8, плитою основи 1 і плитою установлювальною 6. Крім того, на вигляді А показані шість стяжок 18, чотири з яких розташовані по кутах пакета, а дві - посередині широких стінок рамок пакета (С-С і Д-Д). На фіг.5 зображене кріплення рамкових модулів, базисного блоку, плити основи та плити установлювальної в пакет стяжками 18 за допомогою гайок 19, 20. У розрізі С-С зображена стяжка з центрувальними втулками 21, а в розрізі Д-Д зображена стяжка без центрувальних втулок. На фіг.6 зображений вигляд Е (фіг.4), де показане розташування центрувальної втулки 21 у стику рамкових модулів. На фіг.7 зображений базисний блок 11 у розрізі Б-Б (фіг.3). Корпус базисного блока містить тонкостінну чотиригранну прямокутну рамку 22, до одного торця якої прикріплена плита 23 з підкосами 24, а до іншого плоска стрижнева ферма 25. Зовні корпусу базисного блока встановлені й високоточно з'юстовані сканери корисного навантаження 12, 13 і прилади ПВКО 14, 15, 16. На фіг.8 зображене розміщення приладів ПВКО 26 і 27 усередині корпусу базисного блоку, які прикріплені до рамки 22, приладу 28, що прикріплений до плити 23, та приладу 29, що прикріплений до стрижневої ферми 25. На фіг.9 зображений супутник у робочому положенні, в якого сонячна батарея забезпечує максимальний енергоз'єм при запуску супутника на сонячно-синхронну орбіту з нахилом -98,08°, при місцевому часі низхідного вузла ~10 годин 30 хв. При цьому за допомогою поворотних механізмів, відповідно до проведених розрахунків, забезпечені установка та фіксування в робочому положенні під енергетичне оптимальними кутами двох панелей сонячної батареї, розташованих ліворуч відносно напрямку польоту суп утника, під кутом 50° до напрямку в надир, а двох панелей, розташованих праворуч відносно напрямку польоту, під кутом 70° до напрямку в зеніт. На фіг.10 зображений супутник у робочому положенні, в якого сонячна батарея забезпечує максимальний енергоз'єм при запуску суп утника на орбіту з нахилом ~82,5°. При цьому за допомогою поворотних механізмів, відповідно до проведених розрахунків, забезпечені поворот і фіксація панелей у робочому положенні під енергетичне оптимальним кутом 35° до напрямку в надир. Робота конструкції пропонованого супутника зводиться до забезпечення стабільності високоточного з'юстування сканерів корисного навантаження й приладів ПВКО, установлених на корпусі базисного блоку, в умовах: - протидії корпусу базисного блока 11 та решти скріплених стяжками 18 корпусів рамкових модулів 10 і плит 1, 6 разом з центрувальними втулками перевантаженням при транспортуванні, виведені на орбіту, відділенні суп утника від РН і впливу невагомості; - протидії корпусу базисного блока 11 температурним деформаціям за допомогою теплових екранів 8, установлених на бічних гранях супутника, і терморегулювальних покриттів. Після виведення супутника на орбіту та відділення його від РН по команді від системи керування супутника спрацьовують пірочеки 9. Панелі 4 розчековуються, під дією поворотних механізмів 5 розвертаються із транспортного положення в робоче та фіксуються під оптимальними кутами відносно орбітальної системи координат для забезпечення максимального інтегрального енергоз'єму із сонячної батареї на періоді обігу суп утника. Наприклад: - при запуску суп утника на сонячно-синхронну орбіту з нахилом ~98,08° при місцевому часі низхідного вузла ~12 годин чотири панелі фіксуються в одній площині, спрямовані фотоперетворювачами в зеніт; - при запуску суп утника на сонячно-синхронну орбіту з нахилом ~98,08° при місцевому часі низхідного вузла ~10 годин 30 хв. дві панелі розташовані ліворуч відносно напрямку польоту супутника, під кутом 50° до напрямку в надир, а дві панелі, розташовані праворуч відносно напрямку польоту, фіксуються під кутом 70° до напрямку в зеніт; - при запуску суп утника на орбіту з нахилом ~82,5° чотири панелі фіксуються під кутом 35° до напрямку в надир. У цей час на підприємстві розроблена конструкторська та технологічна документація на супутник і виготовлені повномасштабний і силовий макети для проведення випробувань. Випробування, наближені до натурних умов, показали, що конструкція запропонованого супутника дозволяє забезпечити рішення поставленого завдання, а саме: - підвищити точність орієнтації сканерів корисного навантаження ~ в 3 рази; - зменшити габаритні розміри супутника ~ на 10 %; - спростити технологію складання супутника; - термоізолювати внутрішності суп утника від зовнішніх теплових впливів для забезпечення разом з терморегулювальними покриттями мінімальних температурних деформацій корпусу базисного блока та збереження високоточного з'юстування сканерів корисного навантаження та приладів ПВКО; забезпечити залежно від параметрів орбіти супутника максимальний інтегральний енергоз'єм із сонячної батареї на періоді обігу супутника.
ДивитисяДодаткова інформація
Назва патенту англійськоюSatellite of remote sounding of the earth
Автори англійськоюVaisero Mykhailo Vasyliovych, Diachenko Eduard Mykolaiovych, Zubenko Volodymyr Pylypovych, Kavun Vasyl Viktorovych, Tarasov Hennadii Vasyliovych, Schudro Anatolii Petrovych
Назва патенту російськоюСпутник дистанционного зондирования земли
Автори російськоюВайсеро Михаил Васильевич, Дьяченко Эдуард Николаевич, Зубенко Владимир Филиппович, Кавун Василий Викторович, Тарасов Геннадий Васильевич, Щудро Анатолий Петрович
МПК / Мітки
МПК: B64G 1/00
Мітки: землі, супутник, зондування, дистанційного
Код посилання
<a href="https://ua.patents.su/10-79274-suputnik-distancijjnogo-zonduvannya-zemli.html" target="_blank" rel="follow" title="База патентів України">Супутник дистанційного зондування землі</a>
Спосіб бортової обробки інформації дистанційного зондування землі
Номер патенту: 64176
Опубліковано: 16.02.2004
Автор: Загорулько Олександр Миколайович
МПК: H04B 7/00
Мітки: спосіб, обробки, землі, бортової, інформації, зондування, дистанційного
Формула / Реферат:
Спосіб бортової обробки інформації з мультиспектральних сенсорних пристроїв космічних апаратів дистанційного зондування Землі, який полягає в тому, що по радіолінії "борт-Земля" на пункти прийому інформації послідовно передається інформація спектральних каналів, який відрізняється тим, що передачі підлягає повна інформація тільки рівня першого спектрального каналу, а з інших каналів передається різниця значень рівнів між першим та...
Пристрій для радіолокаційного дистанційного зондування
Номер патенту: 37819
Опубліковано: 16.02.2004
Автор: Цимбал Валерій Миколайович
МПК: G01D 21/00, H04B 1/00, G01S 13/00
Мітки: зондування, пристрій, радіолокаційного, дистанційного
Формула / Реферат:
Радіолокаційний пристрій для дистанційного зондування, що містить у своєму складі задавальний генератор, формувач кодової послідовності, модулятор, підсилювач потужності, комутатор прийом/передача, приймальний розгалужувач, а також n приймальних каналів, кожен з яких складається з приймального фільтра, порогового пристрою та приймального ключа, приймальний суматор, приймач та корелятор, причому перший вихід задавального генератора підключено...
Багатопроменевий скануючий нвч-радіометр для дистанційного зондування
Номер патенту: 56346
Опубліковано: 15.05.2003
Автори: Комяк Володимир Олександрович, Шило Сергій Анатолійович
МПК: G01S 13/95
Мітки: нвч-радіометр, багатопроменевий, зондування, дистанційного, скануючий
Формула / Реферат:
Багатопроменевий скануючий НВЧ-радіометр для дистанційного зондування, що містить послідовно з'єднані скануючу антену і фільтр, послідовно з’єднані перший змішувач і підсилювач проміжної частоти, перший гетеродин, вихід якого приєднаний до другого входу першого змішувача, а також М каналів обробки (М1), кожний з яких містить квадратичний детектор і фільтр низьких частот,...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування
Номер патенту: 76538
Опубліковано: 15.08.2006
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
Мітки: допомогою, відносних, змін, вимірювання, температури, акустичного, зондування, повітря, спосіб, дистанційного
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування, що включає випромінювання в атмосферу пакета гармонійних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, моностатичне зондування атмосфери в двох різних за кутом місця напрямках, у вертикальному і під деяким кутом місця, з однієї точки водночас або по...
Спосіб дистанційного виміру анізотропії турбулентних пульсацій параметрів атмосфери за допомогою зондування
Номер патенту: 67663
Опубліковано: 17.07.2006
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/95, G01H 17/00
Мітки: анізотропії, пульсацій, турбулентних, атмосфери, спосіб, дистанційного, зондування, допомогою, параметрів, виміру
Формула / Реферат:
1. Спосіб захисту програмного забезпечення від несанкціонованого використання, при якому розповсюджують програмне забезпечення, яке записане на носіїї з попередньо введеним у нього неповторюваним кодом, при цьому проводять виключення принаймні однієї функціональної компоненти, вводять у програмне забезпечення за допомогою елементів захисту коди апаратури і код копії програмного забезпечення, які передають постачальнику програмного...
Попередній патент: Спосіб синтезу хіральних n-арилпіперазинів
Наступний патент: Шторка з гнучкими бічними кромками
Випадковий патент: Композиція та спосіб стимуляції росту рослин та везикулярних деревоподібних мікоризальних грибів