Пристрій для радіолокаційного дистанційного зондування

Формула / Реферат
Радіолокаційний пристрій для дистанційного зондування, що містить у своєму складі задавальний генератор, формувач кодової послідовності, модулятор, підсилювач потужності, комутатор прийом/передача, приймальний розгалужувач, а також n приймальних каналів, кожен з яких складається з приймального фільтра, порогового пристрою та приймального ключа, приймальний суматор, приймач та корелятор, причому перший вихід задавального генератора підключено до сигнального входу модулятора, другий - до гетеродинного входу приймача, а третій - до входу формувача кодової послідовності, вихід якого підключено до керуючого входу модулятора, вихід підсилювача потужності з'єднано з передавальним входом комутатора прийом/передача, антенний вхід якого підключено до антени, а приймальний вихід - до входу приймального розгалужувача, кожен з n виходів якого через відповідний приймальний фільтр підключено до входу відповідного порогового пристрою та сигнального входу відповідного приймального ключа, а вихід відповідного порогового пристрою підключено до керуючого входу відповідного приймального ключа, вихід якого зв'язаний з відповідним входом приймального суматора, вихід якого з'єднано з сигнальним входом приймача, вихід якого приєднано до сигнального входу корелятора, який відрізняється тим, що в нього додатково введені передавальний розгалужувач, n передавальних каналів, кожен з яких складається з смугового фільтра та ключа, передавальний суматор, змішувач та пристрій запису/зчитування, причому вхід передавального розгалужувача підключено до виходу модулятора, а кожен з n його виходів - до входу відповідного смугового фільтра, зв'язаного своїм виходом з сигнальним входом відповідного ключа, керуючий вхід якого з'єднано з виходом відповідного порогового пристрою, а вихід - з відповідним входом передавального суматора, який підключено своїм виходом до входу підсилювача потужності та першого входу змішувача, другий вхід якого зв'язаний з гетеродинним входом приймача, а вихід - з записувальним входом пристрою запису/зчитування, керуючий вхід якого з'єднано з третім виходом задавального генератора, а вихід - з опорним входом корелятора.
Текст
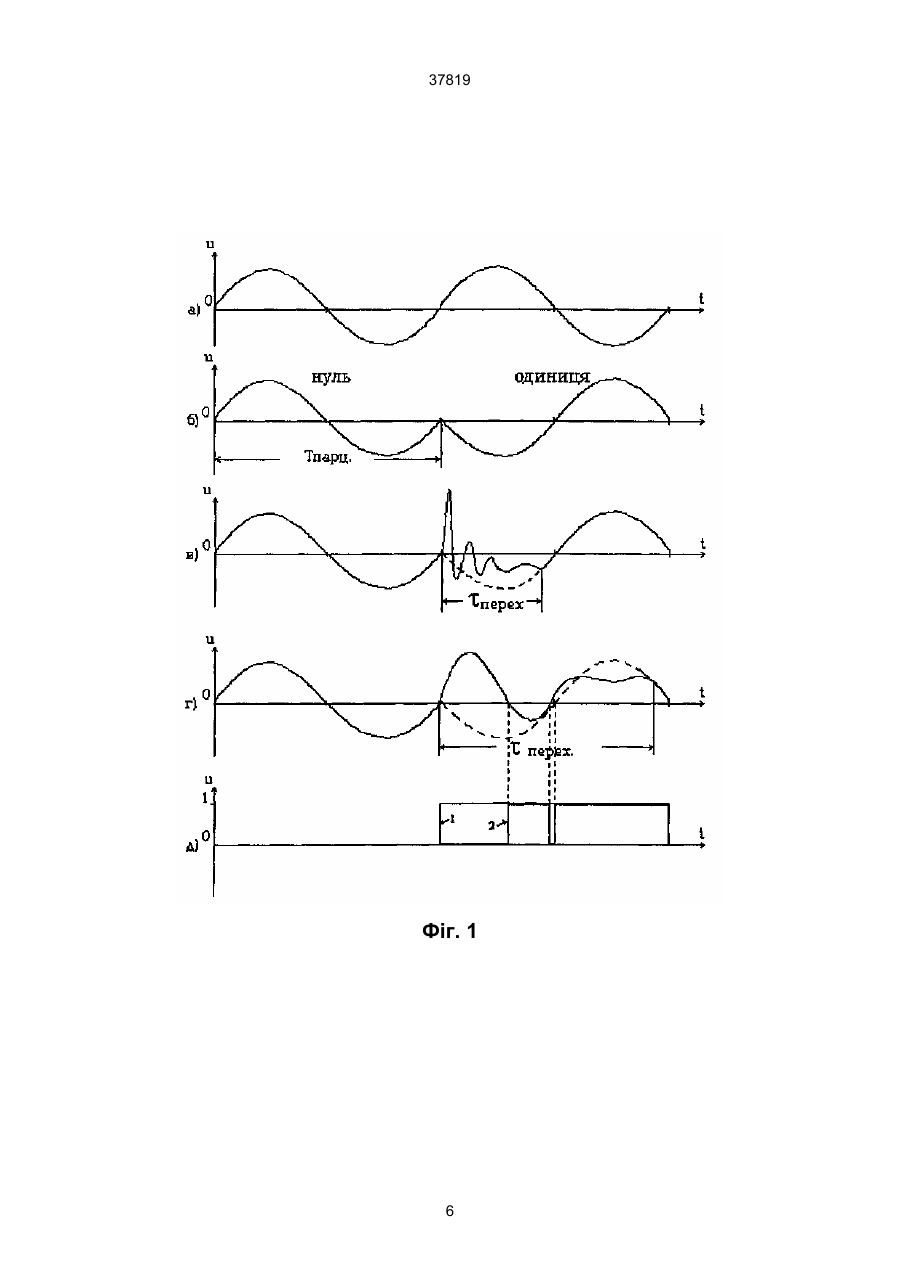
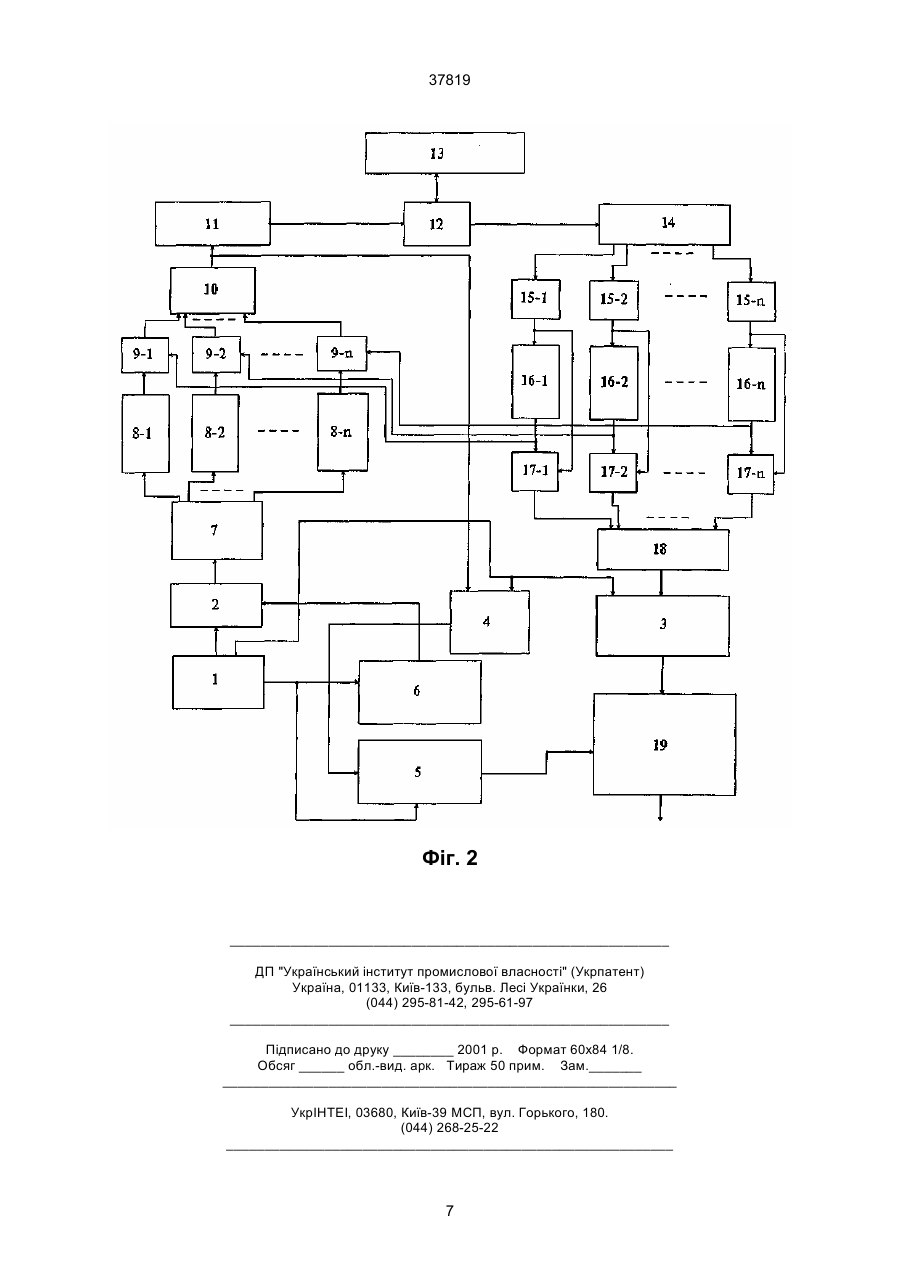
Радіолокаційний пристрій для дистанційного зондування, що містить в своєму складі задаючий генератор, формувач кодової послідовності, модулятор, підсилювач потужності, комутатор прийом/передача, приймальний розгалужувач, а також n приймальних каналів, кожен з яких складається з приймального фільтру, порогового пристрою та приймального ключа, приймальний суматор, приймач та корелятор, причому перший вихід задаючого генератора підключено до сигнального входу модулятора, другий до гетеродинного входу приймача, а третій до входу формувача кодової послідовності, вихід якого підключено до керуючого входу модулятора, вихід підсилювача потужності з'єднано з передавальним входом комутатору прийом/передача, антенний вхід якого підключено до антени, а приймальний вихід - до входу приймального розгалужувача, кожен з n виходів якого через відповідний приймальний фільтр підключено A (54) ПРИСТРІЙ ДЛЯ РАДІОЛОКАЦІЙНОГО ДИСТАНЦІЙНОГО ЗОНДУВАННЯ 37819 полосні сигнали за рахунок введення приймача чи його корелятора в режим "насичування". Також відомий пристрій подавлення вузькополосних завад (А. с. 1501285 СРСР, МКВ 4 Н04В1/10 /Богатов Г.Б., Громов Е.Г., Кожеуров А.Б., Обухович Р.Ф., Чадович І.І.; Ленінгр. ін-т авіац. приладобуд. - № 4292493/24-09; Заявл. 30.07.87; Опубл. 15.8.89, Бюл. № 30) який містить в своєму складі блоки режекції, що автоматично настроюються на частоти вузькополосних завад та подавляють їх, зберігаючи частину корисної інформації широкополосних сигналів, яка міститься в полосі спектру частот поза завадами. Тим часом пропускання суміші корисного широкополосного сигналу та вузькополосних завад через систему режекторних фільтрів, які автоматично настроюються на частоти завад, приводить не тільки до подавлення цих завад, але і до суттєвого скорочення ефективної широчини та перекручення частотного спектру корисного широкополосного сигналу. При чому скорочення ефективної широчини спектру прийнятих радіолокаційних сигналів приводить до погіршення просторового розрізнення радіолокаційної системи та зменшення точності виміряння рівня відбитих сигналів, т. я. корисно використовується тільки частина радіолокаційної потужності, що була випроменена. Перекручення частотного спектру прийнятих радіолокаційних сигналів відносно спектру сигналів, що випромінюються, теж приводить до зменшення їх амплітуди та погіршання форми, що в свою чергу знижує точність виміряння. Останнє дуже сильно проявляється при використанні так званих "складних" радіолокаційних сигналів, які тільки і здатні забезпечити ефективність та добре просторове розрізнення сучасних радіолокаційних систем. Розглянемо вплив цих перекручень на прикладі використання "складного" радіолокаційного сигналу з великою базою у вигляді фазокодоманіпульованої послідовності, такі сигнали широко використовуються в сучасних системах. Аналіз ілюструється епюрами, що приведені на фіг. 1. Як відомо фазокодоманіпульовані сигнали формуються таким чином, що елементи кодової послідовності (нулі та одиниці) відображаються, наприклад, в вигляді зсуву початкової фази відрізків синусоїди, відповідно на 0° та 180°. На епюрах а) та б) фіг. 1 представлено опорну синусоїду та сформовані з неї два елементи кодової послідовності (нульовий та одиничний) довжиною (Тпарц.) в один період синусоїди кожен. На виході прийомного пристрою проводиться обробка прийнятого сигналу шляхом знакового перемноження фазокодоманіпульованого сигналу з опорним синусоїдальним сигналом (який співпадає з вихідним по частоті і фазі) для отримання кодової послідовності, що складається з нулів та одиниць, і яка в свою чергу зжимається для отримання короткого імпульсу максимальної амплітуди. При проходженні фазокодоманіпульованого сигналу через приймальний тракт, амплітудно-частотна характеристика якого адаптована до завадової ситуації, тобто перекручена відносно оптимальної характеристики для радіолокаційного сигналу, що випромінюється, і має в собі розташовані випадковим чином частки де сигнал подавлено, вихідний сигнал теж виявляється перекрученим. Характер цих перекручень в часовому вимірі ілюструється епюрами в) та г) фіг. 1, на яких видно, що в момент переключення фази вихідного сигналу, тобто, наприклад, при переході від "нульового" елементу до "одиничного" кодової послідовності, виникне перехідний переколивальний процес, який накладеться на вхідний сигнал, причому форма цього перехідного процесу та тривалість залежить від кількості та конкретного розташування зон подавлення сигналу в амплітудно-частотній характеристиці приймального каналу радіолокаційної системи. В загальному випадку цей перехідний процес перекручує форму результуючого сигналу таким чином, що можливе виникнення помилкових визначень елементів кодової послідовності (див. епюру д) на фіг. 1, графіки 1 та 2), що в свою чергу приводить до неправильного стискання цієї послідовності, а значить до зменшення амплітуди стиснутого імпульсу та росту його бокових пелюсток. Все це викликає зниження точності визначення ефективної поверхні розсіювання об'єктів, що досліджуються за допомогою радіолокаційної системи. Найбільш близьким до технічного рішення, (прототипом), є технічне рішення "Пристрій подавления вузькополосних завад при прийомі широкополосного сигналу" (А. с. 1478343 СРСР, MKB 4 H04B1/10 / Гармонов А.В. -№ 4226116/24-09; Заявл. 7.4.87; Опубл. 7.5.89, Бюл. № 17), який містить в своєму складі N частотних каналів, кожен з яких містить полосовий фільтр, детектор автоматичного регулювання підсилення, підсилювач з коефіцієнтом передачі, що регулюється, обмежувач по максимуму, джерело опорної напруги, тощо. Цей пристрій здійснює розгалуження прийнятого сигналу, що відбивається від досліджуємого об'єкту, на N частотних каналів, кожен з яких містить полосовий фільтр, настроєний таким чином, що його полоса пропускання примикає своїми межами відповідно до верхніх та нижніх меж полос пропускання фільтрів сусідніх каналів. При попаданні вузькополосної завади в полосу пропускання того чи іншого каналу коефіцієнт передачі цих каналів зменшується пропорційно до потужності завади і таким чином зменшується вплив завад на підсумковий сигнал, який отримується шляхом сумування вихідних сигналів всіх N парціальних каналів. Принципово дія цієї системи мало в чому відрізняється від попередньої з системою режекторних фільтрів, що перестроюються на частоти завад, перевагою паралельної системи є більша її швидкодія, оскільки не витрачається час на визначення частот завад та перестройку режекторних фільтрів. Але основні недоліки залишаються - таким же чином, як було відмічено в попередньому випадку, виникають випадкові перекручення сумарної амплітудно-частотної характеристики приймального тракту системи за рахунок подавлення коефіцієнтів передачі і, відповідно, частин спектру корисного сигналу в каналах з завадами, що приводить до помилок в декодуванні "складних" сигналів, наприклад, при відтворенні кодових послідовностей фазокодоманіпульованих радіолокаційних сигналів (дивися фіг. 1), і відповідно до зниження точності виміру їх інтенсивності (або, що теж саме, коефіцієнтів зворотного розсіювання 2 37819 об'єктів, що досліджуються радіолокаційним пристроєм в умовах радіозавад). Суть винаходу. В основу винаходу покладено завдання створити такий радіолокаційний пристрій для дистанційного зондування, в якому виконання системи формування радіолокаційного сигналу, що передається, дозволило би формувати такий сигнал, частотний спектр якого би оперативно адаптувався до частотного розподілу вузькополосних завад, який виявляється за формою результуючої амплітудно-частотної характеристики приймального тракту цієї системи. В результаті цієї адаптації повинні бути попереджені помилки в декодуванні "складних" радіолокаційних сигналів, наприклад, при відтворенні кодових послідовностей фазокодоманіпульованих радіолокаційних сигналів (дивися фіг. 1), і відповідно підвищена ефективність використання сигналу, що випромінюється, та підвищена точність виміру інтенсивності сигналів, що приймаються, (або, що теж саме, коефіцієнтів зворотного розсіювання об'єктів, що досліджуються пристроєм для радіолокаційного дистанційного зондування в умовах вузькополосних радіозавад). Досягнення мети винаходу реалізується шляхом зміни структурної схеми пристрою для радіолокаційного дистанційного зондування, що містить в своєму складі задаючий генератор, формувач кодової послідовності, модулятор, підсилювач потужності, комутатор прийом/передача, приймальний розгалужувач, n приймальних каналів, кожен з яких складається з приймального фільтру, порогового пристрою та приймального ключа, а також приймальний суматор, приймач та корелятор, причому перший вихід задаючого генератора підключено до сигнального входу модулятора, другий до гетеродинного входу приймача, а третій до входу формувача кодової послідовності, вихід якого підключено до керуючого входу модулятора. Вихід підсилювача потужності з'єднано з передавальним входом комутатору прийом/передача, антенний вхід якого підключено до антени, а приймальний вихід - до входу приймального розгалужувача, кожен з n виходів якого через відповідний приймальний фільтр підключено до входу відповідного порогового пристрою та сигнального входу відповідного приймального ключа, а вихід відповідного порогового пристрою підключено до керуючого входу відповідного приймального ключа, вихід якого зв'язаний з відповідним входом приймального суматора. Вихід приймального суматора з'єднано з сигнальним входом приймача, вихід якого приєднано до сигнального входу корелятора. В цей пристрій додатково введені передавальний розгалужувач, n передавальних каналів, кожен з яких складається з фільтру та ключа, передавальний суматор, змішувач та пристрій запису/зчитування. Вхід передавального розгалужувача підключено до виходу модулятора, а кожен з n його виходів - до входу відповідного фільтра, зв'язаного своїм виходом з сигнальним входом відповідного ключа, керувальний вхід якого з'єднано з виходом відповідного порогового пристрою, а вихід - з відповідним входом передавального суматора, який підключено своїм виходом до входу підсилювача потужності та першого входу змішувача, другий вхід якого зв'язаний з гетеродинним входом приймача, а вихід - з записувальним входом пристрою запису/зчитування, керуючий вхід якого з'єднано з третім виходом задаючого генератору, а вихід - з опорним входом корелятора. Таким чином, в передавальний тракт радіолокаційного пристрою додатково введено систему із n частотних каналів, кожен з яких містить полосовий фільтр, настроєний таким чином, що його полоса пропускання примикає своїми межами відповідно до верхніх та нижніх меж полос пропускання фільтрів сусідніх каналів. Причому частотна характеристика кожного з цих фільтрів ідентична частотній характеристиці відповідного приймального фільтру, а керування сумарною амплітудно-частотною характеристикою цих частотних каналів здійснюється синхронно з керуванням сумарною амплітудно-частотною характеристикою приймальних каналів. Тобто, якщо в якомусь з приймальних частотних каналів буде виявлено вузькополосну заваду, то будуть відключені від виходу цей приймальний канал та точно такий за номером частотний канал в передавальному тракті радіолокаційного пристрою. При цьому: по-перше, спектр радіолокаційного сигналу, що випромінюється буде строго узгоджено з завадовою ситуацією та амплітудно-частотною характеристикою приймального тракту, незважаючи на вузькополосні завади сто відсотків потужності корисного сигналу, що відбито об'єктом дослідження проходить на вихід приймального тракту; по-друге, форма сигналу, що передається і яка утворюється на виході передавального суматора, хоч і змінюється залежно від розташування радіозавад, але в подальшому при проходженні приймального тракту не перекручується і, таким чином, при дешифруванні прийнятого "складного" сигналу в приймальному кореляторі (яке складається з знакового перемноження отриманого на виході приймача сигналу та затриманої і перенесеної на низьку частоту копії сигналу, якого було випромінено, і які в даному випадку на відміну від попередніх завжди ідентичні за формою) не виникне перекручень елементів кодової послідовності і, відповідно, не виникне зменшення амплітуди стиснутого імпульсу, розширення основного та росту рівня його бокових пелюсток. А це забезпечить підвищений рівень точності визначення інтенсивності прийнятого сигналу і, відповідно, коефіцієнту зворотного розсіювання об'єктів, що досліджуються радіолокаційним пристроєм для дистанційного зондування в умовах вузькополосних завад. Перелік фігур креслень. Матеріали винаходу ілюструються двома фігурами креслень. На фіг. 1 наведено епюри, які пояснюють яким чином виникають помилки в визначенні елементів кодової послідовності при дешифруванні "складного" радіолокаційного сигналу в умовах перекручення амплітудно-частотної характеристики приймального тракту радіолокатора. Перекручення виникають за рахунок вимкнення частотних каналів, які уражені вузькополосними завадами. На епюрі а) приведено опорну синусоїду, яка підлягає фазокодовій модуляції, на епюрі б) представлено два елементи замодульованої кодової послідовності, причому "нульовий" елемент послідовності представлено парціальним елементом 3 37819 сигналу модульованим фазовим зсувом 0°, а "одиничний" елемент - фазовим зсувом 180°. На епюрах в) та г) показані перекручення елементу фазокодомодульованого сигналу, що виникають за рахунок вимкнення різного числа "уражених" вузькополосними завадами частотних каналів приймального тракту, розташування яких випадкове. Ці перекручення в часі мають вигляд т. з. перехідного процесу переколивального характеру, тривалість та форма якого залежить від результуючої амплітудно-частотної характеристики приймального тракту. На епюрі д) наведені результати дешифрування фазокодоманіпульованного сигналу без перекручень (1) та з перекрученнями згідно епюри г) (2). На фіг. 2 представлено структурну схему радіолокаційного пристрою для дистанційного зондування згідно винаходу. Відомості, які підтверджують можливість здійснення винаходу. Структурна схема радіолокаційного пристрою для дистанційного зондування представлена на фіг. 2. Згідно винаходу до його складу входить задаючий генератор 1, який своїм першим виходом підключено до сигнального входу модулятора 2, другим - до гетеродинного входу приймача 3 та другого входу змішувача 4, а третім - до керуючого входу пристрою 5 запису/зчитування та через формувач 6 кодової послідовності до керуючого входу модулятора 2. Вихід модулятора 2 зв'язано з входом передавального розгалужувача 7, кожен з n виходів якого під'єднано до входу відповідного за номером фільтра (8-1....8-n), вихід якого підключено до сигнального входу відповідного за номером ключа (9-1......9-n). Система з n полосових фільтрів (8-1....8-n) налагоджена таким чином, що нижня межа полоси пропускання наступного за номером фільтру примикає до верхньої межи полоси пропускання попереднього за номером фільтру. Виходи ключів (9-1......9-n) з'єднані з відповідними за номером входами передавального суматора 10, вихід якого приєднано до входу підсилювача потужності 11 та до першого входу змішувача 4, вихід якого підключено до записуючого входу пристрою 5 запису/зчитування. Вихід підсилювача потужності 11 приєднано до передавального входу комутатору 12 прийом/передача, зв'язаного антенним входом з антеною 13, а приймальним виходом - з входом приймального розгалужувача 14, кожен з n виходів якого підключено через відповідний за номером приймальний фільтр (15-1......15-n) до поєднаних між собою входу відповідного порогового пристрою (16-1.....16-n) та сигнального входу відповідного за номером приймального ключа (17-1. ...17-n). Причому приймальні фільтри (15-1. ..15-n) виконані таким чином, що амплітудно-частотна характеристика відповідного приймального фільтра (15-1...15-n) абсолютно ідентична амплітудночастотній характеристиці відповідного за номером фільтру (8-1...8-n). Вихід кожного порогового пристрою (16-1...16-n) відповідно підключено до поєднаних між собою керувальних входів відповідних за номером ключа (9-1...9-n) та приймального ключа (17-1...17-n), кожен з яких своїм виходом зв'язане з відповідним входом приймального суматора 18. Приймальний суматор поєднано виходом з сигнальним входом приймача 3, вихід якого приєднано до сигнального входу корелятора 19, опорний вхід якого підключено до виходу пристрою 5 запису/зчитування. Робота пристрою здійснюється таким чином. Задаючий генератор 1 формує опорний сигнал радіочастоти, що подається на сигнальний вхід модулятора 2 та другий вхід змішувача 4 і гетеродинний вхід приймача 3, а також синхронізуючі сигнали, що поступають на вхід формувача кодової послідовності 6 та до керуючого входу пристрою 5 запису/зчитування. Формувач 6 кодової послідовності формує відеосигнал кодової послідовності, що складається з нулів та одиниць розташованих в часі за визначеним законом (наприклад за одним із законів широко відомих бінарних кодів Баркера), і яка подається на керуючий вхід модулятора, що формує широкополосний "складний" зондуючий радіосигнал модульований кодовою послідовністю по фазі елементами 0° та 180°. Цей сигнал поступає на вхід передавального розгалужувача 7, який розподіляє його на систему з n частотних каналів, до кожного з яких входить фільтр (один з 8-1.....8-n) та ключ (один з 9-1.. ..9-n), і які здійснюють розфільтрування широкополосного радіосигналу по частотним каналам, причому система з n полосових фільтрів (8-1....8-n) налаштована так, що нижня межа полоси пропускання наступного за номером фільтру примикає до верхньої межи полоси пропускання попереднього за номером фільтру, формуючи таки чином на виході передавального суматора при всіх включених ключах (9-1...9-n) сполошну широку полосу пропускання узгоджену з спектром широкополосного сигналу. Сумарний широкополосний зондуючий радіолокаційний сигнал через комутатор 12 прийом/передача подається на антену 13 та випромінюється в бік об'єкту що досліджується. Відбитий чи розсіяний в зворотному напрямку від об'єкту сигнал приймається антеною 13 радіолокатора та направляється на вхід приймального розгалужувача 14, який розподіляє його на систему з n частотних каналів, до кожного з яких входить фільтр (один з 15-1.....15-n), пороговий пристрій (один з 16-1....16-n) та ключ (один з 17-1....17-n), і які здійснюють розфільтрування широкополосного радіосигналу по частотним каналам, причому система з n полосових фільтрів (15-1..15-n) абсолютно ідентична системі фільтрів (8-1....8-n) і налаштована так, що нижня межа полоси пропускання наступного за номером фільтру примикає до верхньої межи полоси пропускання попереднього за номером фільтру, формуючи таким чином на виході приймального суматора 18 при всіх включених ключах (17-1...17-n) сполошну широку полосу пропускання узгоджену з спектром широкополосного сигналу. Порогові пристрої (16-1...16-n) аналізують в кожному каналі наявність вузькополосних завадових сигналів, що перевищують допустимий рівень, та у випадку коли такий сигнал присутній в даному каналі, то порогові пристрої виключать відповідно один і той же за номером частотний канал на приймальному боці та на передавальному за допомогою ключів (17-1...17-n) та (9-1....9-n). Сумарний прийнятий широкополосний радіолокаційний сигнал, в якому відсутні вузькополосні завади з виходу приймального суматора 18 подається на сигнальний вхід приймача 3. 4 37819 Причому за рахунок того, що спектр зондуючого радіолокаційного сигналу сформований системою передавальних частотних каналів в кожен момент часу строго відповідає сумарній амплітудночастотній характеристиці приймального тракту, то спектр відбитого сигналу проходить на вихід без втрат, та на виході приймального суматора не з'являється нових перекручень форми прийнятого сигналу в порівнянні з формою зондуючого радіосигналу. Приймач 3 проводить підсилення прийнятого сигналу та перенос його на низьку частоту за допомогою змішування з опорним сигналом задаючого генератора 1, цей сигнал також використовується для отримання на виході змішувача 4 ни зькочастотної копії радіолокаційного зондуючого сигналу, яка зберігає всі особливості його форми, що виникли за рахунок виключення частини частотних каналів при його формуванні. Ця копія записується в пристрій 5 запису/зчитування, а потім з необхідною затримкою зчитується для отримання в кореляторі кореляційної функції прийнятого "складного" сигналу, що був відбитий об'єктом. За рахунок того, що форми прийнятого сигналу та копії повторюють одна одну, при отриманні кореляційної функції не виникає додаткових помилок (дивися фіг. 1) при визначенні амплітуди відбитого сигналу та коефіцієнту зворотного розсіяння об'єкту, що досліджується. 5 37819 Фіг. 1 6 37819 Фіг. 2 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for remote radar sounding
Назва патенту російськоюУстройство для дистанционного радиолокационного зондирования
МПК / Мітки
МПК: H04B 1/00, G01D 21/00, G01S 13/00
Мітки: пристрій, радіолокаційного, зондування, дистанційного
Код посилання
<a href="https://ua.patents.su/7-37819-pristrijj-dlya-radiolokacijjnogo-distancijjnogo-zonduvannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для радіолокаційного дистанційного зондування</a>
Багатопроменевий скануючий нвч-радіометр для дистанційного зондування
Номер патенту: 56346
Опубліковано: 15.05.2003
Автори: Шило Сергій Анатолійович, Комяк Володимир Олександрович
МПК: G01S 13/95
Мітки: багатопроменевий, зондування, скануючий, дистанційного, нвч-радіометр
Формула / Реферат:
Багатопроменевий скануючий НВЧ-радіометр для дистанційного зондування, що містить послідовно з'єднані скануючу антену і фільтр, послідовно з’єднані перший змішувач і підсилювач проміжної частоти, перший гетеродин, вихід якого приєднаний до другого входу першого змішувача, а також М каналів обробки (М1), кожний з яких містить квадратичний детектор і фільтр низьких частот,...
Спосіб бортової обробки інформації дистанційного зондування землі
Номер патенту: 64176
Опубліковано: 16.02.2004
Автор: Загорулько Олександр Миколайович
МПК: H04B 7/00
Мітки: зондування, бортової, інформації, спосіб, землі, обробки, дистанційного
Формула / Реферат:
Спосіб бортової обробки інформації з мультиспектральних сенсорних пристроїв космічних апаратів дистанційного зондування Землі, який полягає в тому, що по радіолінії "борт-Земля" на пункти прийому інформації послідовно передається інформація спектральних каналів, який відрізняється тим, що передачі підлягає повна інформація тільки рівня першого спектрального каналу, а з інших каналів передається різниця значень рівнів між першим та...
Пристрій для дистанційного керування енергетичними об’єктами по лініях електропередачі
Номер патенту: 61015
Опубліковано: 15.10.2003
Автори: Хлистов Валерій Михайлович, Велігоцький Георгій Павлович, Григорів Василь Романович, Яндульський Олександр Станіславович
МПК: H02J 13/00
Мітки: дистанційного, лініях, енергетичними, пристрій, об'єктами, електропередачі, керування
Формула / Реферат:
Пристрій для дистанційного керування енергетичними об'єктами по лініях електропередачі, що містить пункт керування, який включає приймач зовнішніх сигналів і таймер, виходи яких підключені до першого і другого входів елемента АБО відповідно, передавальний вузол, перший вихід якого підключений до входу блока узгодження пункту керування, чотири виходи якого підключені до відповідних проводів трифазної електричної мережі, а п'ятий вихід...
Спосіб дистанційного виміру анізотропії інтенсивності температурних пульсацій атмосфери за допомогою акустичного зондування
Номер патенту: 46519
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95
Мітки: температурних, анізотропії, інтенсивності, дистанційного, виміру, атмосфери, допомогою, акустичного, зондування, спосіб, пульсацій
Формула / Реферат:
Спосіб дистанційного виміру анізотропії інтенсивності температурних пульсацій атмосфери за допомогою акустичного зондування, що включає випромінювання в атмосферу пакета гармонічних коливань звуку у вертикальному напрямку і під кутом до вертикалі одночасно чи по черзі з однієї точки на місцевості, прийом розсіяних температурними неоднорідностями акустичних хвиль, перетворення прийнятих звукових коливань в електричні, вимір амплітуди...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46520
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95
Мітки: повітря, атмосфери, змін, вимірювання, допомогою, дистанційного, температури, відносних, спосіб, акустичного, зондування
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонічних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери в двох різних за азимутом напрямках з однієї точки одночасно (чи...
Попередній патент: Спосіб розділення твердих матеріалів
Наступний патент: Композиції, що поглинають кисень, шаруваті матеріали і пакувальні вироби на їх основі, та спосіб пакування чутливої до кисню речовини
Випадковий патент: Спосіб виробництва круп з ячменю