Частотно-регульований асинхроний електропривод
Номер патенту: 8583
Опубліковано: 30.09.1996
Формула / Реферат
1. Частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока, систему управления инвертором, снабженную двумя группами входов и подключенную выходами к входам управления автономного инвертора тока, датчики фазных токов и напряжений статора, выходы которых подключены к блоку определения ЭДС двигателя, снабженного амплитудным и фазными выходами, блок определения потока двигателя, снабженный амплитудным и фазными выходами и подключенный входами к фазным выходам блока определения ЭДС двигателя, блок задания составляющих тока статора, выходы которого подключены к входам блока задания амплитуды тока статора и к первой группе входов блока преобразования координат, вторая группа входов которого связана с выходами датчиков фазных токов статора, а выходы подключены к первой группе входов системы управления инвертором, вторая группа входов которой подключена к фазным выходам блока определения потока двигателя, при этом выход блока задания амплитуды тока статора подключен к входу регулятора амплитуды тока статора, соединенного с входом управления управляемого выпрямителя, отличающийся тем, что, с целью повышения надежности электропривода, в него введены генератор пилообразных сигналов, снабженный управляющим входом в входами коммутации, блок импульсного измерения угла запаздывания инвертора, снабженный двумя группами фазных входов, два функциональных преобразователя с синусной я косинусной характеристиками соответственно и блок деления, входы которого подключены к амплитудным выходам блока определения ЭДС двигателя и блока определения потока двигателя, а выход соединен с управляющим входом генератора пилообразных сигналов, входы коммутации которого подключены к выходам системы управления инвертором, при этом первая группа фазных входов блока импульсного измерения угла запаздывания инвертора подключена к выходам генератора пилообразных сигналов, вторая группа фазных входов - к выходам датчиков фазных токов статора, а выход - к объединенным между собой входам функциональных преобразователей с синусной и косинусной характеристиками, выходы которых подключены к второй группе входов блока преобразования координат.
2. Электропривод по п.1, отличающийся тем, что генератор пилообразных сигналов содержит три интегратора, каждый из которых зашунтирован управляемым ключом, при этом объединенные между собой входы интеграторов образуют управляющий вход генератора пилообразных сигналов, а управляющие входы управляемых ключей и выходы интеграторов образуют соответственно входы коммутации и выходы генератора пилообразных сигналов.
3. Электропривод по пп.1 и 2, отличающийся тем, что блок импульсного угла запаздывания инвертора содержит элемент запоминания коротких сигналов, вход которого подключен к объединенным между собой первым выводам трех управляемых ключей, управляющий вход каждого из которых подключен к выходу соответствующего элемента дифференцирования, соединенного входом с выходом соответствующего нуль-органа, при этом вторые выводы управляемых ключей подключены к соответствующим резисторам, другие выводы которых образуют первую группу фазных входов блока импульсного измерения угла запаздывания инвертора, вторая группа фазных входов которого и выход образованы соответственно входами нуль-органов и выходом элемента запоминания коротких сигналов.
Текст
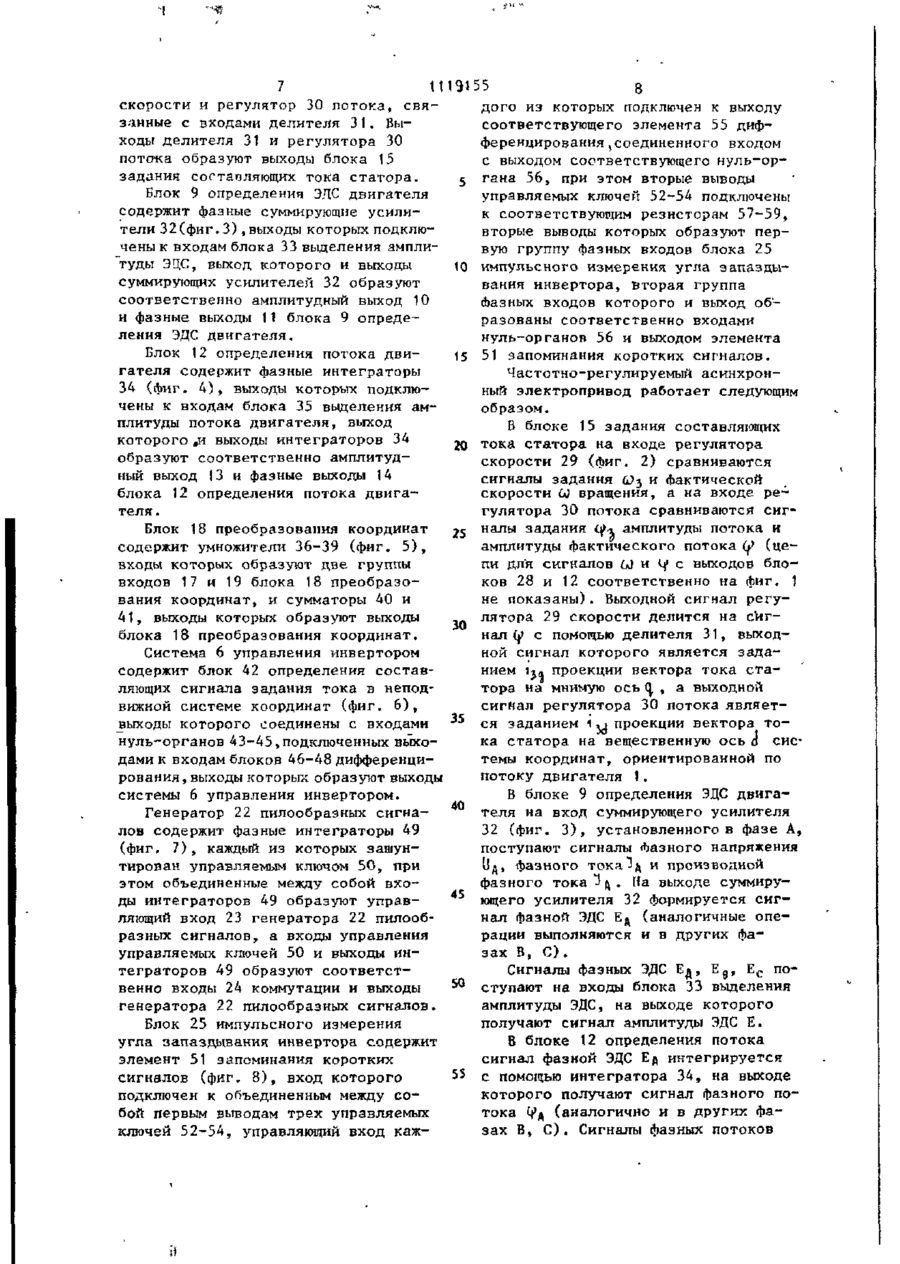
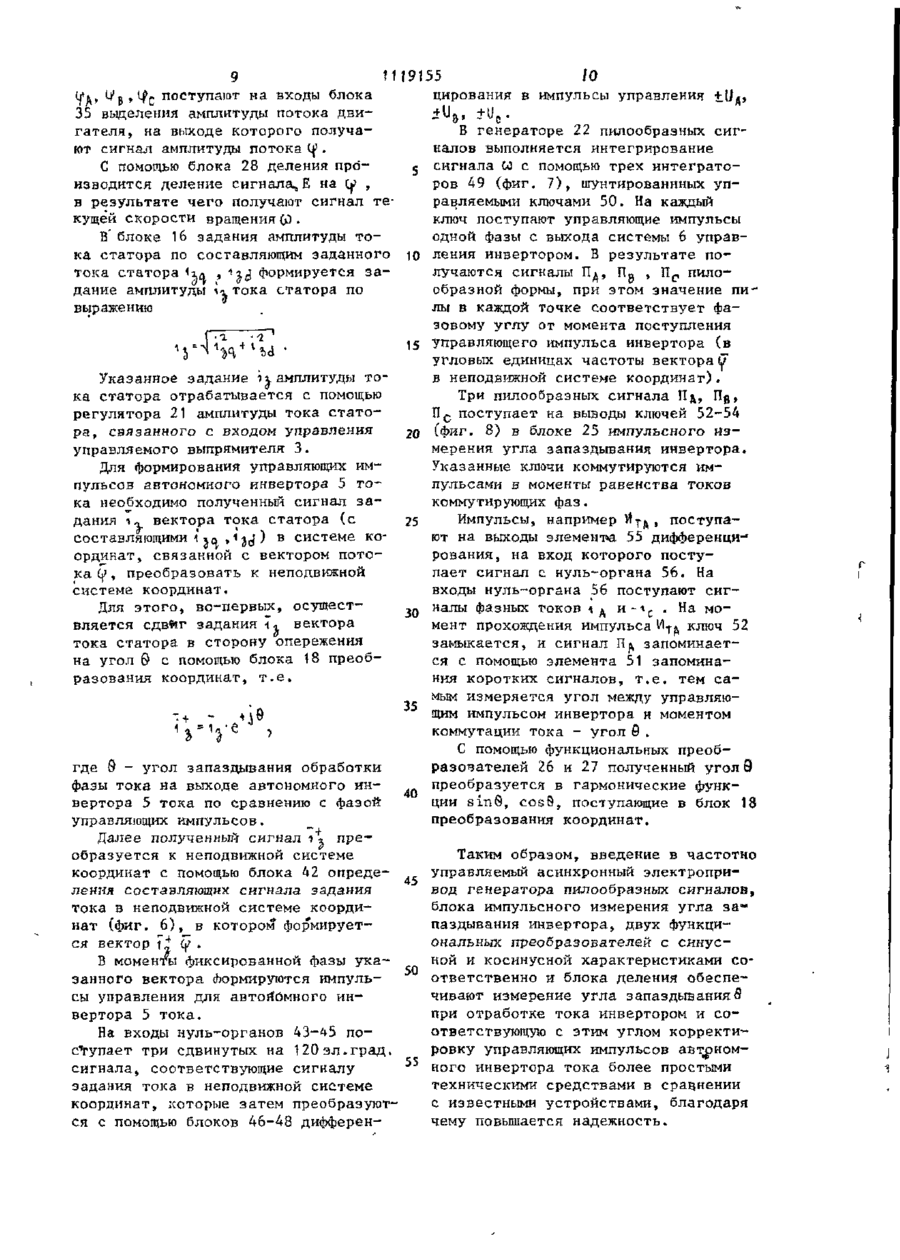
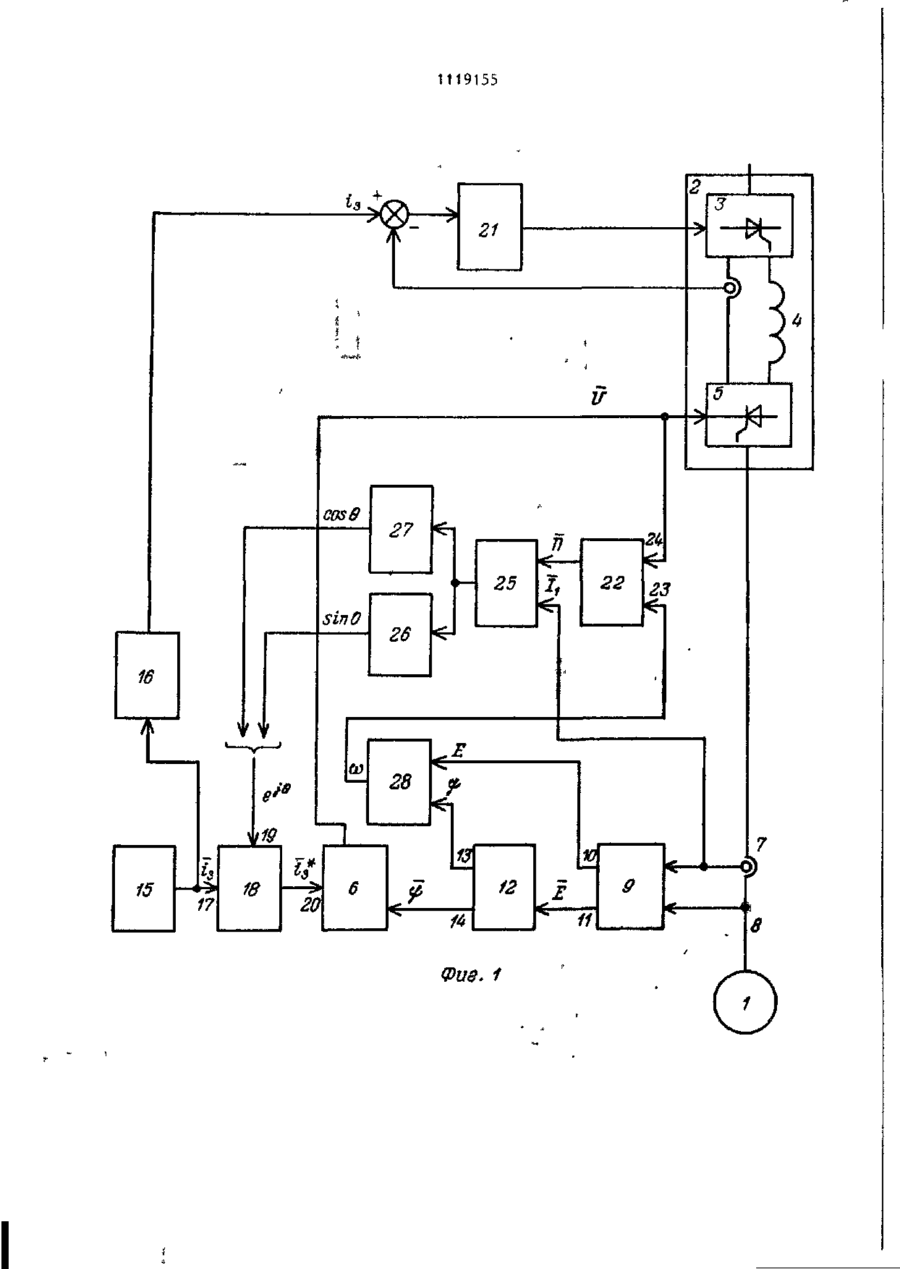
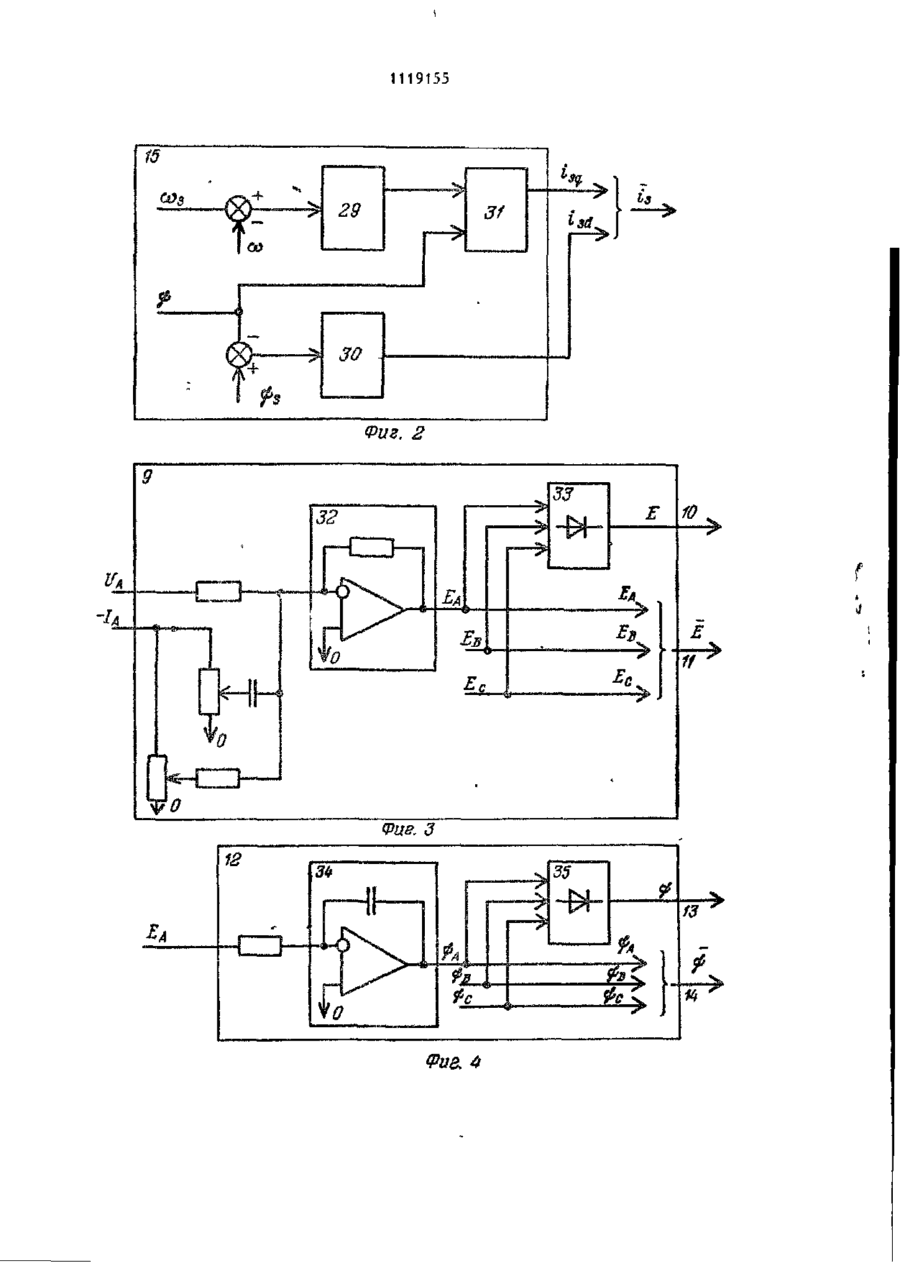
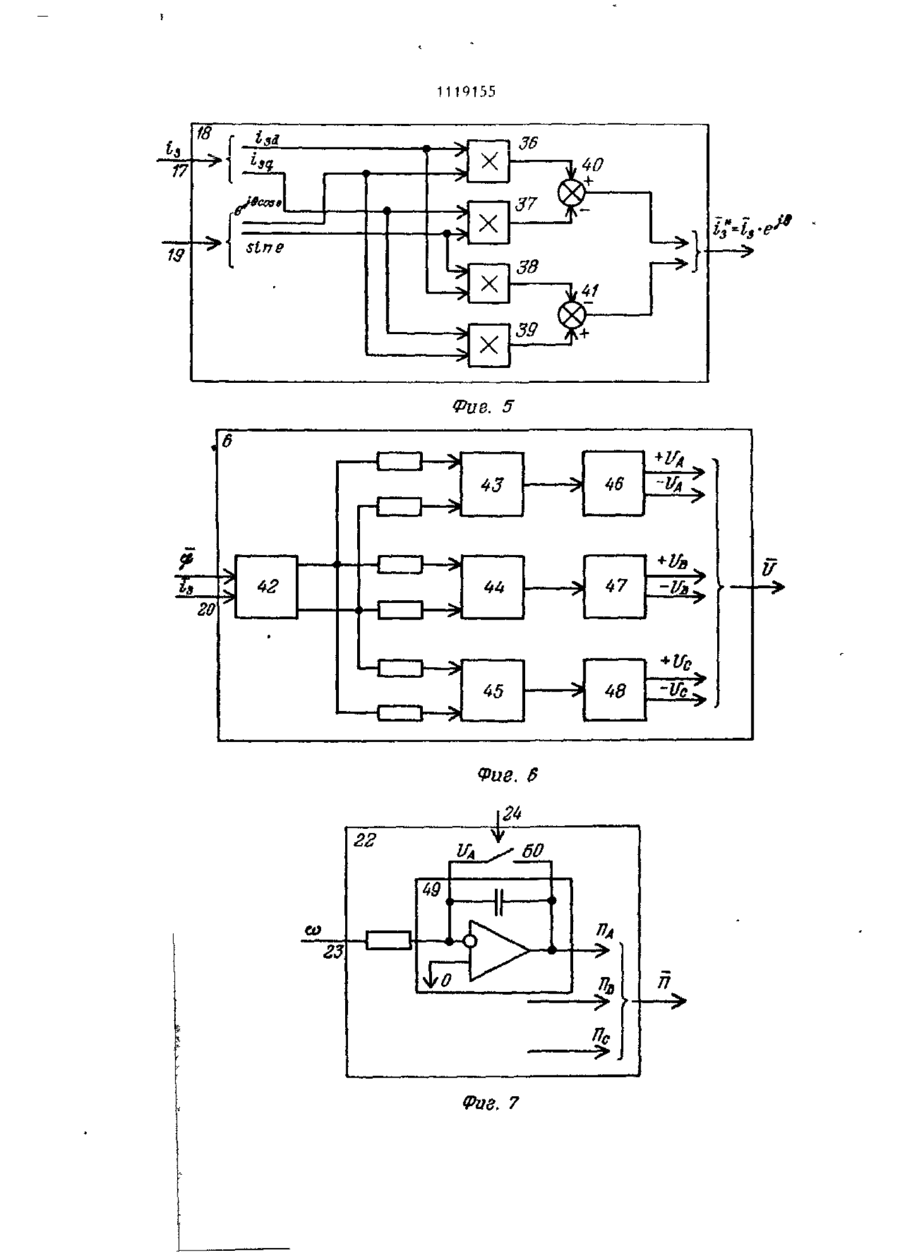
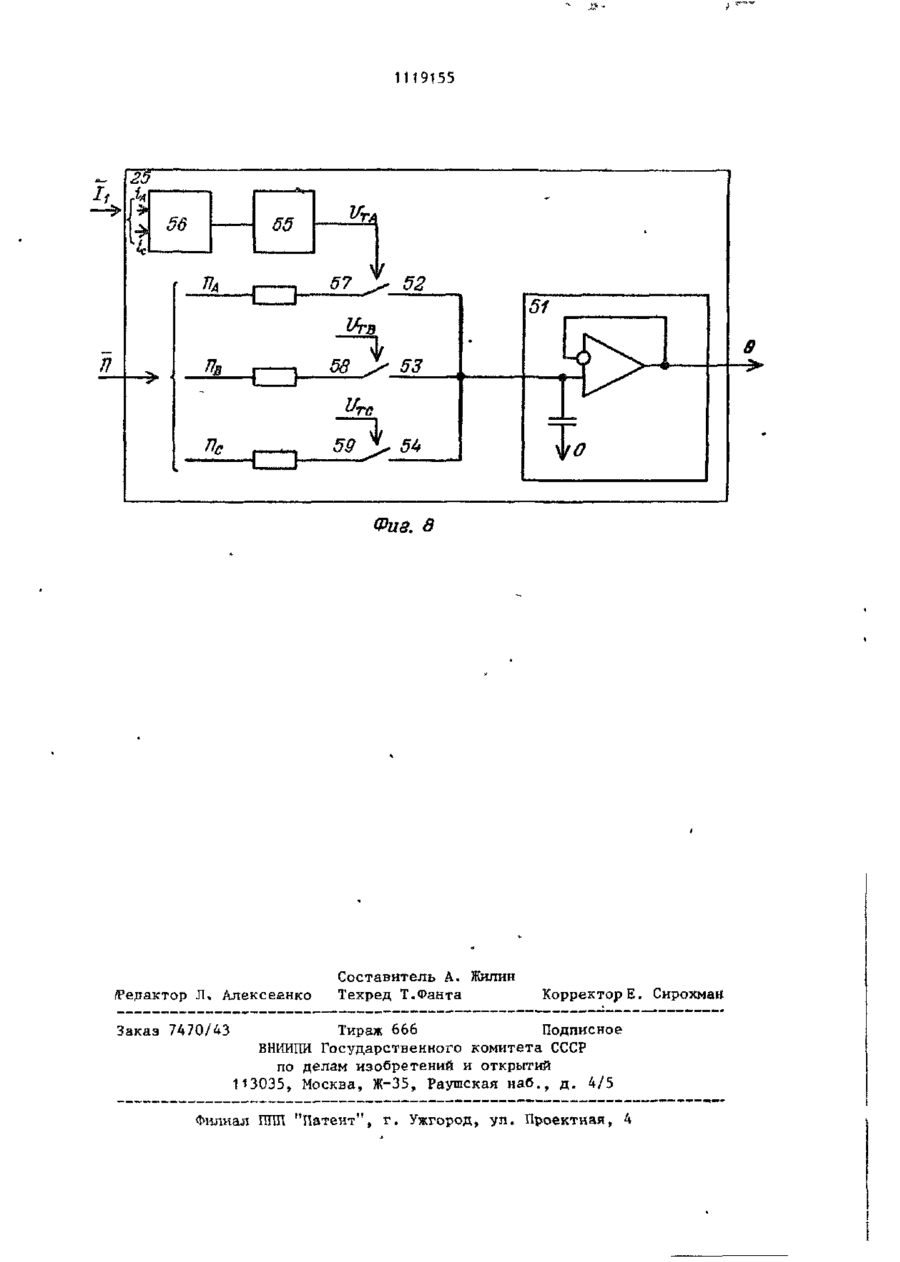
1. ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных управляемого выпрямителя, дросселя и авто немного инвертора тока, систему управления инвертором, снабженную двумя группами входов и подключенную выходами к входам управления автономного инвертора тока, датчики (Ъаэных токов и напряжений статора, выходы которых подключены к блоку определения ЭДС двигателя, снабженного амплитудным и фазными выходами, блок определения потока двигателя, снаб-. женный амплитудным и фазными выходами и подключенный входами к фазным выходам блока определения ЭДС двигателя, блок задания составляющих тока статора, выходы которого подключены к входам блока задания амплитуды тока статора и к первой группе входов блока преобразования координат, вторая группа входов кото рого связана с выходами датчиков фазных токов статора> а выходы подключены к первой группе входов системы управления инвертором, вторая группа входов которой подключена к фазным выходам блока определения потока двигателя, при этом выход блока задания амплитуды тока статора подключен к входу регулятора амплитуды тока статора, соединенного с входом управления управляемого выпрямителя, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности электропривода, в него введены генератор пилообразных сигналов, снабженный управляющим входом и входами коммутации, лок импульсного измерения угла запаздывания инвертора, снабженный двумя группами фазных входов, два Функциональных (преобразователя с синусной и косинусной характеристиками соответствен но и блок деления, входы которого подключены к амплитудным выходам блока определения ЭДС двигателя и блока определения потока двигателя, а выход соединен с управляющим входом генератора пилообразных сигналов, входы коммутации которого подключены к выходам системы управления инвертором, при этом первая группа фазных входов блока импульсного измерения угла запаздывания инвертора подключена к выходам генератора пилообразных сигналов, вторая группа фазных входов - к выходам датчиков фазных токов статора, а выход - к объединенным между собой входам функциональных преобразователей с синусной и косинусной характеристиками, выходы которых подключены "Ч а е 11 19155 к второй группе входов блока преобразования координат. 2. Электропривод по п.1, о т л ич а ю ш и й с я тем, что генератор пилообразных сигналов содержит три интегратора, каждый из кв-торых зашунтирован управляемым ключом, при этом объединенные между собой входы интеграторов образуют управляющий вход генератора пилообразных сигналов, а управляющие входы управляемых ключей и выходы интеграторов образуют соответственно входы коммутации и выходы генератора пилообразных сигналов. 3. Электропривод по пп. 1 и 2, о т л и ч а ю щ и й с я тем, что блок импульсного угла запаздывания инвертора содержит элемент запоми нания коротких сигналов, вход которого подключен к объединенным 1 между собої первым выводам трех управ пчемых ктлиеч, управляющий вход каждого из которых подключен к выходу соответствующего элемента дифсЬеренцирования, соединенного входом с выходом соответствующего нульоргана, при этом вторые выводы управляемых ключей подключены к соответствующим резисторам, другие выводы которых образуют первую группу фазных входов блока импульсного измерения угла запаздывания инвертора, вторая группа фазных входов которого и выход образованы соответственно входами нуль-органов и выходом элемента запоминания коротких сигналов. Изобретение относится к электротехнике, в частности к системам автоматического управления частотнорегулируемь*іи электроприводами, выполненными на основе асинхронного короткозамкнутого двигателя и тиристорного преобразователя частоты с автономным инвертором тока, и может быть использовано в механизмах об10 щепромышленного назначения с высокими требованиями по качеству регулирования скорости вращения. Известен частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с корот' козамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных управляе20 мого выпрямителя, дросселя и автономного инвертора тока? систему управления инвертором, подключенную выходами к входам управления автономного инвертора тока, а первыми входами через блокопределения фаз" ных потокосцеплений - к выходам датчиков фазных токов и напряжений статора, блок задания составляющих тока статора, выходы которого через формирователь задания амплитуды тока 30 статора и регулятор амплитуды тока статора подключены к входам управ ления управляемого выпрямителя, при этом вторые входы системы управления инвертором связаны с выходами блока задания составляющих тока статора, а выходы блока определения фазных потокосцеплений подключены к блоку нормирования, сзязанному с системой управления инвертором [Л . Недостатком известного электропривода является наличие запаздывания в канале коррекции фазы, определяемого конечной скоростью изменения выходного сигнала интегратора фазовой погрешности. Это приводит к тому, что задаваемые блоком задания проекций тока статопа значения момента и потока двигателя в динамике воспроизводятся с искажениями, что, в свою очередь, приводит к затяжке и ухудшению качества переходных процессов в приводе. Наиболее близким к изобретению по технической сущности является частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока, систему управления З * •11191 55 4 инвертором, снабженную двумя группаженный амплитудным и фазными выми входов и подключенную выходами ходами и подключенный входами к фаз" к входам управления автономного инным выходам блока определения ЭДС вертора тока ; датчики фазных токов двигателя, блок задания составляющих •и напряжений статора, выходы кото,тока статора, выходы которого под'рых подключены к блоку определения ключены к входам блока задания амЭДС двигателя, снабженного амплитудплитуды тока статора и к первой групным и фазными выходами, блок опрепе входов блока преобразования коорделения потока двигателя, снабжендинат, вторая группа входов котороный амплитудным и фазными выходами 10 го связана с выходами датчиков фази подключенный входами к фазным выных токов статора, а выходы подклюходам блока определения ЭДС двигачены к первой группе входов систетеля, блок задания составляющих томы управления инвертором, вторая ка статора, выходы которого подключе группа входов которой подключена к ны к входам блока задания амплитуды фазным выходам блока определения по15 тока статора и к первой группе вхотока двигателя, при этом выход блодов блока преобразования координат, ка задания амплитуды тока статора вторая группа входов которого свяподключен к входу регулятора амплизана с выходами датчиков фазных тотуды тока статора, соединенного с вхоков статера, а выходы подключены к дом управлення управляемого выпряпервой группе входов системы управмителя, введены генератор пилообразления инвертором, вторая группа вхоных сигналов, снабженный управляюдов которой подключена к фазным выщим входом и входами коммутации, ходам блока определения потока двиблок импульсного измерения угла загателя, при этом выход блока задапаздывания инвертора, снабженный . • ния амплитуды тока статора подклюдвумя группами фазных входов, два чен к входу регулятора амплитуды . функциональных преобразователя с тока статора, соединенного с входом синусной и косинусной характеристиуправления управляемого выпрямителя, ками соответственно и блок деления, В известном электроприводе произвовходы которого подключены к амплитуддится учет запаздывания, вносимого 30 ным выходам блока определения ЭДС автономным инвертором тока [2І . двигателя и блока определения потока двигателя, а выход соединен с упНедостатками этого электропривода равляющим входом генератора пилообявляются сложность схемного решеразных сигналов, входы коммутации ния и низкая надежность. которого подключены к выходам сисЦель изобретения - повышение на- 35 темы управления инвертором, при этом дежности частотно-регулируемого первая группа фазных входов блока асинхронного электропривода путем импульсного измерения угла запаздыупрощения схемы и сокращения коливания инвертора подключена к выхочества элементов. дам генератора пилообразных сигна40 лов, вторая группа фазных входов - к Указанная цель достигается тем, что в частотно-регулируемый асинвыходам датчиков фазных токов статохронный электропривод, содержащий ра, а выход - к объединенным между асинхронный двигатель с короткозамсобой входам функциональных преобракнутым ротором, статориые обмотки зователей с синусной и косинусной 45 характеристиками, выходы которых которого подключены к преобразователю частоты, составленному из поподключены к второй группе входов следовательно соединенных управляеблока преобразования координат. мого выпрямителя, дросселя и автономного инвертора тока, систему управления инвертором, снабженную 50 При этом генератор пилообразных двумя группами входов и подключенную сигналов содержит три интегратора, выходами к входам управления автономкаждый из которых зашунтирован упного инвертора тока, датчики фазных равляемым ключом» при этом объедитоков и напряжений статора, выходы ненные мевду собой входы интегратокоторых подключены к блоку определе- 55 ров образуют управляющий вход гення ЭДС двигателя, снабженного амнератора пилообразных сигналов, а плитудным и фазными выходами, блок управляющие входы управляемых ключей .определения потока двигателя, снаби выходы интеграторов образуют соот 5 11 191 55 6 ветственно входы коммутации и выходи ными выходами 11, блок 12 определегенератора пилообразных сигналов. ' ния потока двигателя, снабженный Кроме того, блок импульсного изамплитудным выходом 13 и фазными вымерения угла запаздывания инвертора ходами 14 и подключенный входами к содержит элемент запоминания коротфазным выходам 11 блока 9 определеких сигналов, вход которого подклюния ЭДС двигателя, блок 15 задачен к объединенным между собой перния составляющих тока статора, вывым выводам трех управляемых ключей, ходы которого подключены к входам управляющий вход каждого из которых блока 16 задания амплитуды тока подключен к выходу соответствующего 10 статора и к первой группе входов 17 элемента дифференцирования, соедиблока 18 преобразования координат, ненного входом с выходом- соответствувторая группа входов 19 которого свяющего нуль-органа» при этом вторые зана с выходами датчиков 7 фазных выводы управляемых ключей подключетоков статора, а выходы подключены ны к соответствующим резисторам, )5 к первой группе входов 20 системы 6 другие выводы которых образуют перуправления инвертором, вторая групвую группу фазных входов блока импа входов которой подключена к фазпульсного измерения угла запаздываным выходам 14 блока 12 определения инвертора, вторая группа фазных ния потока двигателя, при этом вывходов которого и выход образованы ход блока 16 задания амплитуды тока 2Q соответственно входами нуль-органов статора подключен к входу регулятои выходом элемента -запоминания кора 21 амплитуды тока статора, соеротких сигнапов, диненного с входом управления упНа фиг. 1 представпена структурравляемого выпрямителя 3. ная схема предлагаемого частотноВ частотно-регулируемый асинхрон25 регулируемого асинхронного электроный электропривод в&едены генератор привода; на фиг. 2 - структурная 22 пилообразных сигналов, снабженсхема блока задания составляющих ный управляющим входом 23 и входами тока статора; на фиг. 3 - структур24 коммутации, блок 25 импульсного ная схема блока определения ЭДС измерения угла запаздывания инвер,„ двигателя; fca фиг. 4 - структурная тора, снабженный двумя группами фазсхема блока определения потока двиных входов, два функциональных прегателя; на фиг. 5 - структурная образователя 26 и 27 с синусной и схема блока преобразования коордикосинусной характеристиками соответнат; на фиг. 6 - структурная схема ственно и блок 28 деления, входы ко35 системы управления инвертором; на торого подключены к амплитудному выфиг. 7 - структурная схема генератоходу 10 блока 9 определения ЭДС двира пилообразных сигнапов; на фиг.8 гателя и к амплитудному выходу 13 структурная схема блока импульсного блока 12 определения потока двигаизмерения угла запаздывания инвертеля, а выход соединен с управляю40 тора* щим входом 23 генератора пилообразЧастотно-регулируемый асинхронных сигналов 22, входы 24 коммутаный электропривод содержит асинхронции которого подключены к выходам ный двигатель 1 (фиг. 1) с короткосистемы 6 управления инвертором, замкнутым ротором, статорные обмотпри этом первая группа фазных вхо45 ки которого подключены к преобразодов 25 импульсного измерения угла вателю 2 частоты, составленному из запаздывания инвертора подключена последовательно соединённый управляек выходам генератора 22 пилообразмого выпрямителя 3, дросселя 4 и ных сигналов, вторая группа фазных автономного инвертора 5 тока, сисвходов-к выходам датчиков 7 фазных тему 6 управления инвертором, снаб- 50 токов статора, а выход - к объедиженную двумя группами входов и подненным между собой входам функциключенную выходами к входам управональных преобразователей 26 и 27 > ления автономного инвертора 5 тока, с синусной и косинусной характерисдатчики 7 фазкьгх токов статора и даттиками, выходы которых подключены к чики S фазных напряжений статора, второй группе входов 19 блока 18 выходы которых подключены к блоку 9 преобразования координат. определения ЭДС двигателя, снабженБлок 15 задания составляющих то- ' ного амплитудным выходом 10 и фазка статора содержит регулятор 29 f\ 7 tt !Э»55 скорости и регулятор 30 потока, связанные с входами делителя 31. Выходы делителя 31 и регулятора 30 потока образуют выходы блока 15 задания составляющих тока статора. Блок 9 определения ЭДС двигателя содержит фазные суммирующие усилители 32(фиг. 3),выходы которых подключены к входам блока 33 выделения амплитуды ЭЦС, выход которого и выходы суммирующих усилителей 32 образуют соответственно амплитудный выход 10 и фазные выходы 11 блока 9 определения ЭДС двигателя. Блок 12 определения потока двигателя содержит фазные интеграторы 34 (фиг. 4 ) , выходы которых подключены к входам блока 35 выделения амплитуды потока двигателя, выход которого вИ выходы интеграторов 34 образуют соответственно амплитудный выход 13 и фазные выходы 14 блока 12 определения потока двигателя. Блок 18 преобразования координат содержит умножители 36-39 (фиг. 5 ) , входы которых образуют две группы входов 17 и 19 блока 18 преобразования координат, и сумматоры 40 и 41, выходы которых образуют выходы блока 18 преобразования координат. Система 6 управления инвертором содержит блок 42 определения составляющих сигнала задания тока в неподвижной системе координат (фиг. 6 ) , ^эыходы которого соединены с входами нуль-органов 43-45,подключенных выходами к входам блоков 46-48 дифференцирования, выходы которых образуют выходы системы 6 управления инвертором. Генератор 22 пилообразных сигналов содержит фазные интеграторы 49 (фиг* 7 ) , каждый из которых зашунтирован управляемым ключом 50, при этом объединенные между собой входы интеграторов 49 образуют управляющий вход 23 генератора 22 пилообразных сигналов, а входы управления управляемых ключей 50 и выходы интеграторов 49 образуют соответственно входы 24 коммутации и выходы генератора 22 пилообразных сигналов. 5 10 15 20 25 30 35 в дого из которых подключен к выходу соответствующего элемента 55 дифференцирования соединенного входом с выходом соответствующего нуль-органа 56, при этом вторые выводы управляемых ключей 52-54 подключены к соответствуклцим резисторам 57-59, вторые выводы которых образуют первую группу фазных входов блока 25 импульсного измерения угла запаздывания инвертора, вторая группа (Ьазньгх входов которого и выход образованы соответственно входами нуль-органов 56 и выходом элемента 51 запоминания коротких сигналов. Частотно-регулируемый асинхронный электропривод работает следующим образом. В блоке 15 задания составляющих тока статора на входе регулятора скорости 29 (фиг. 2) сравниваются сигналы задания 0)$ и фактической скорости (л} вращения, а на входе регулятора 30 потока сравниваются сигналы задания qu амплитуды потока и амплитуды фактического потока ( Сце^ пи для сигналов Ы и ^ с выходов блоков 28 и 12 соответственно на фиг, 1 не показаны). Выходной сигнал регулятора 29 скорости делится на сигнал (> с помощью делителя 31, выходj ной сигнал которого является заданием 1J« проекции вектора тока статора на мнимую ось
ДивитисяДодаткова інформація
Назва патенту англійськоюFrequency-controlled asychronous drive
Автори англійськоюEpshtein Isaak Izrailiovych
Назва патенту російськоюЧастотно-регулируемый асинхронный электропривод
Автори російськоюЭпштейн Исаак Изральвич
МПК / Мітки
МПК: H02P 27/04
Мітки: асинхроний, електропривод, частотно-регульований
Код посилання
<a href="https://ua.patents.su/10-8583-chastotno-regulovanijj-asinkhronijj-elektroprivod.html" target="_blank" rel="follow" title="База патентів України">Частотно-регульований асинхроний електропривод</a>
Електропривод змінного струму

Номер патенту: 3189
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: змінного, електропривод, струму
Формула / Реферат:
Электропривод переменного тока, содержащий электродвигатель, задатчик фазных токов, два однофазных преобразователя тока, подключенные входами к выходам задатчика фазных токов, а первыми выходными выводами - к первому и второму входным выводам двигателя соответственно, отличающийся тем, что вторые выходные выводы преобразователя тока объединены и подключены к третьему входному выводу двигателя.
Електропривод з частотно-струмовим керуванням
Номер патенту: 3188
Опубліковано: 26.12.1994
Автори: Попов Віктор Іванович, Лукашенко Андрій Германович, Ярославцев Михайло Іванович
МПК: H02P 7/18
Мітки: частотно-струмовим, керуванням, електропривод
Формула / Реферат:
1. Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, ротор которого механически соединен с ротором фазовращателя, вход фазовращателя соединен с первым выходом задающего генератора, второй вход которого соединен с первым входом фазочувствительного выпрямителя, второй вход которого соединен с выходом делителя частоты, выход фазовращателя соединен с входом формирователя коротких импульсов, выход которого соединен с...
Частотно-регульований електропривід
Номер патенту: 8810
Опубліковано: 30.09.1996
Автори: Волков Олександр Васильович, Андрієнко Петро Дмитрович
МПК: H02P 27/04
Мітки: електропривід, частотно-регульований
Формула / Реферат:
Частотно-регулируемый электропривод, содержащий асинхронный двигатель, обмотки которого подключены к выходам формирователя статорного тока, снабженного первым и вторым управляющими входами и клеммами для подключения питающей сети, датчик частоты и датчик ЭДС, связанные с асинхронным двигателем, узел заданий управляющих сигналов с первым и вторым выходами, регулятор частоты, подключенный управляющим входом к первому выходу узла заданий...
Пристрій для управління трифазним двигуном змінного струму
Номер патенту: 3042
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/02
Мітки: пристрій, змінного, трифазним, струму, управління, двигуном
Формула / Реферат:
1. Устройство для управления трехфазным двигателем переменного, тока с соединенными в звезду фазными обмотками, содержащее трехфазный мостовой инвертор с силовыми входами и выходами, предназначенными соответственно для подключения к источнику напряжения и фазным обмоткам статора электродвигателя, измерители токов двух первых фаз, задатчики фазных токов, регуляторы фазных токов, подключенные первыми входами к выходам задатчиков фазных токов,...
Пристрій для керування частотно-регулівним електроприводом
Номер патенту: 8822
Опубліковано: 30.09.1996
Автори: Волков Олександр Васильович, Грінченко Олександр Семенович
МПК: H02P 27/04
Мітки: частотно-регулівним, пристрій, керування, електроприводом
Формула / Реферат:
Устройство для управления частотно-регулируемым электроприводом, содержащее статический преобразователь частоты, снабженный клеммами для подключения питающей сети и асинхронного двигателя, системы управления напряжением и частотой, подключенные выходами к соответствующим управляющим входам статического преобразователя частоты, регулятор частоты и регулятора тока, каждый с двумя входами, узел задания, датчик частоты вращения, датчики тока...
Попередній патент: Обладнання до захисту вентильного реверсивного перетворювача з роздільним управлінням
Наступний патент: Устрій до управління багатодвигуним електроприводом зміного струму
Випадковий патент: Спосіб оцінки ефективності антиоксидантної дії a-ліпоєвої кислоти в лікуванні вегетативно-сенсорної поліневропатії у хворих на вібраційну хворобу