Устрій до управління багатодвигуним електроприводом зміного струму
Номер патенту: 8584
Опубліковано: 30.09.1996
Автори: Епштейн Ісаак Ізраільович, Бару Олександр Юріьович, Богатирев Вадим Павлович
Формула / Реферат
Устройство для управления многодвигательным электроприводом переменного тока, содержащее преобразователь частоты, составленный из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока, причем выходы преобразователя частоты предназначены для подключения к группе асинхронных короткозамкнутых двигателей, блок задания частоты, выходом подключенный к входу задатчика интенсивности, выход которого подключен к первому входу первого блока суммирования, второй вход которого соединен с выходом датчика ЭДС, входы которого соединены с выходами датчиков тока и напряжения двигателя, а выход первого блока суммирования подключен к входу для делимого блока деления, выход которого подключен к входу регулятора ЭДС, выходом подключенного к первому входу второго блока суммирования, второй вход которого соединен сдатчиком тока преобразователя частоты, а выход - с входом регулятора тока, при этом выход последнего подключен к входу первой системы управления, выходы которой соединены с управляющими входами выпрямителя, вторую систему управления, выходы которой соединены с управляющими входами автономного инвертора тока, отличающееся тем, что, с целью повышения быстродействия в динамических режимах разгона и торможения, введены три блока дифференцирования, первый и второй функциональные преобразователи, реализующие соответственно функции arctg b2 и I1= f(b2), где b2 - абсолютное скольжение асинхронного двигателя; I1 - ток фазы двигателя, третий и четвертый блоки суммирования, два блока выделения модуля, блок измерения фазового запаздывания инвертора, блок определения направления вращения, при этом выход задатчика интенсивности подключен к первому входу третьего блока суммирования и к входу первого блока дифференцирования, выход которого соединен с вторым входом третьего блока суммирования, через последовательно соединенные первый функциональный преобразователь и второй блок дифференцирования с третьим входом третьего блока суммирования и через последовательно соединенные второй блок выделения модуля и второй функциональный преобразователь с третьим входом второго блока суммирования, выход третьего блока суммирования подключен к входу блока определения направления вращения и к входу первого блока выделения модуля, выход которого соединен с первым входом четвертого блока суммирования, второй вход которого через третий блок дифференцирования подключен к выходу блока измерения фазового запаздывания инвертора, а выход четвертого блока суммирования с первым входом системы управления инвертором, с входом для делителя блока деления и с первым входом блока измерения фазового запаздывания, второй вход которого соединен с выходами системы управления инвертором, а третий вход - с выходами датчиков тока двигателя, причем выход блока определения направления вращения соединен с вторым входом системы управления инвертором.
Текст
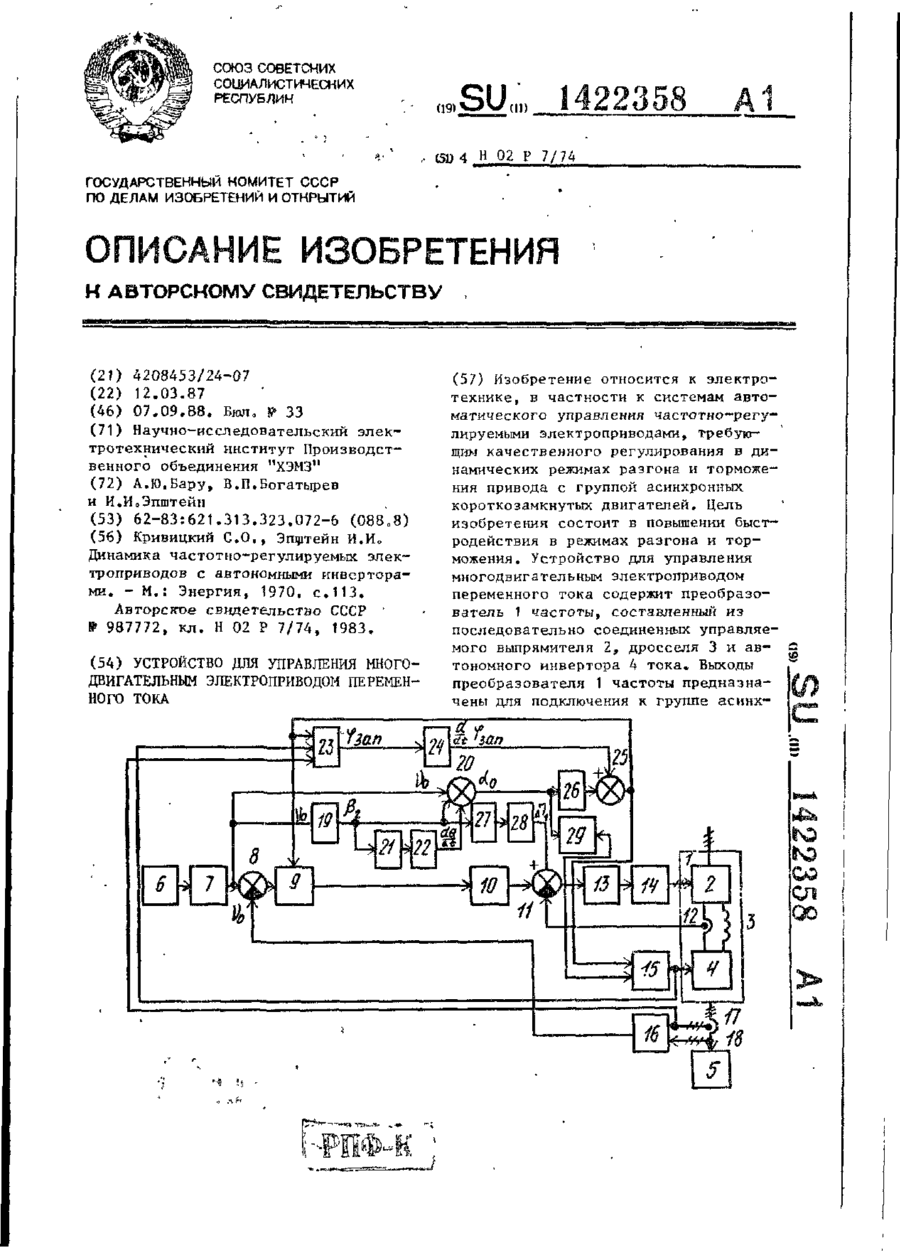
СОЮЗ СОВЕТСНИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИН C5U4 Н 02 F 7/74 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ Н АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ( 2 0 4208453/24-07 (22) 12.03.87 (46) 0 7 . 0 9 . 8 8 . Вкхл* К 33 ° (71) Научно-исследовательский э л е к тротехнический институт Производственного объединения "ХЭМЗ" (72) А.Ю.Бару, В.П.Богатырев и И.ИоЭпштейн (53) 6 2 - 8 3 : 6 2 1 . 3 1 3 . 3 2 3 . 0 7 2 - 6 ( 0 8 8 0 8 ) (56) Кривицкий C O . , Зпцітейн И.И„ Динамика частотно-регулируемых электроприводов с автономными инверторами. - М.: Энергия, 1970. с . 1 1 3 . Авторское свидетельство СССР ' № 9 8 7 7 7 2 , к л . Н 02 Р 7/74, 1983. (54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА (57) Изобретение относится к э л е к т р о т е х н и к е , в частности к системам а в т о матического управления ч а с т о т н о - р е г у лируемыми электроприводами, требующим к а ч е с т в е н н о г о регулирования в д и намических режимах разгона и торможения привода с группой асинхронных короткозамкнутых д в и г а т е л е й . Цель изобретения состоит в повышении быстродействия в режимах р а з г о н а и т о р можения. Устройство для управления многодвигательным электроприводом переменного тока содержит п р е о б р а з о в а т е л ь 1 частоты, составленный из последовательно соединенных управляе мого выпрямителя 2, дросселя 3 и а в тономного инвертора 4 т о к а . Выходы преобразователя 1 частоты предназначены для подключения к группе асинх 1422358 ронных короткозамкнутых двигателей 5. Блок 6 задания частоты, задатчик 7 интенсивности, первый блок суммирования 8, блок деления 9» регулятор 10 ЭДС, блок 11 суммирования, регулятор 13 тока и система 14 управления соединены между собой последовательно. Выход датчика 12 тока преобразователя подключен к второму вхо* ду блока 11 суммирования- Датчик 16 ЭДС входами подключен к датчикам 17 тока и датчику 18 напряжения двигателя, а выходом - к второму входу бло ка 8 суммирования. В устройство введены блоки 19, 22 и 24 дифференцирования, Функциональные преобразователи 21 и 28, блоки 20, 25 суммирования, блоки 26, 27 выделения модуля, блок 23 измерения фазового запаздывания инвертора и блок 2? определения знака частоты. В устройстве обеспечивается быстродействующее формирование сигналов задания тока и частоты, используемых для управления двигателями. 1 ил. 1 вход которого соединен с выходом датИзобретение относится к электрочика 12 тока преобразователя, а вытехнике, в частности к системам автоход - с входом регулятора 13 тока. матического управления частотно-регуВыход последнего подключен к входу лируемыми электроприводами, выполненными на основе группы асинхронных ко- 5 первой системы 14 управления, выходы которой соединены с управляющими вхороткозамкнутых двигателей и тиристордами выпрямителя 2. Вторая система ного преобразователя частоты с авто15 управления выходом соединена с номным инвертором тока, и может быть управляющими входами автономного нниспользовано в механизмах, требующих качественного регулирования в динами- 10 вертора 4 тока, устройство содержит также датчик 16 ЭДС, входы которого ческих режимах разгона и торможения соединены с выходами датчиков 17 топривода. ка и 18 напряжения двигателя, Цель изобретения - повышение быста выход - с вторым входом первого родействия в режимах разгона и тормо15 блока 8 суммирования. В устройстжения. - во введены первый блок 19 дифНа чертеже представлена структурференцирования, вход которого соединая блок-схема устройства для управнен с выходом задатчика 7 интенсивления многодвигательным электропривоности, третий блок 20 суммирования, дом переменного тока. 20 первый вход которого соединен с выУстройство содержит преобразоваходом задатчика 7 интенсивности, а тель 1 частоты, составленный из посвторой - с выходом первого блока 19 ледовательно соединенных управляемого дифференцирования, последовательно выпрямителя 2, дросселя 3 и автономсоединенные первый функциональный ного инвертора 4 тока, причем выходы ' 25 преобразователь 21 и второй блок 22 преобразователя частоты предназначены дифференцирования, причем вход перводля подключения к группе асинхронных го функционального преобразователя короткозамкнутых двигателей 5, блок 21 соединен с выходом первого блока 6 задания частоты, подключенный к 19 дифференцирования, а выход второго входу задатчнка 7 интенсивности, выход которого подключен к первому вхо- 30 блока 22 дифференцирования - с третьим входом третьего блока 20 суммирования, ду первого блока 8 суммирования, блок блок 23 измерения фазового запаздыва9 деления, вход для делимого которого ния автономного инвертора тока, выход подсоединен к выходу первого блока 8 которого подключен к входу третьего суммирования, регулятор 10 ЭДС, вход которого подсоединен к выходу блока 35 блока 24 дифференцирования, а выход 9 делений, а выход - к первому входу последнего - к второму входу четвервторого блока 11 суммирования, второй того блока 25 суммирования, первый 1422358 блок 26 выделения модуля, вход котователь 21 реализует функцию Г. = рого соединен с выходом третьего бло=arctg(Fg, ), которая аппроксимируется ка 20 суммирования, выход соединен с отрезками прямых. Второй функциональпервым входом четвертого блока 25 ный преобразователь 28 реализует засуммирования, а выход последнего висимость тока статора I, от скольжес первым входом системы 15 управления рг при постоянстве потокосцепления инвертором, с первым вхЪдом блония ротора [ =const, которая аппрок/ ка 23 измерения фазового запаздывасимируется отрезками прямых, смешенния инвертора и с входом для делите10 ными вверх по оси ординат. Блоки 19, ля блока 9 деления, последовательно 22 и 24 дифференцирования представсоединенные второй блок 27 выделения ляют собой цепочки. Блоки 26 и 27 вымодуля и второй функциональный преобделения модуля выполнены на операциразователь 28, причем вход второго онных усилителях и диодах. блока 27 выделения модуля соединен Блок 23 измерения фазового запаз15 с выходом первого блока 19 дифферендывания инвертора содержит интегрицирования, а выход второго функциорующий усилитель, зашунтированный нального преобразователя 28 соединен первым ключевым элементом, на вход с третьим входом второго блока 11 которого подается сигнал частоты, суммирования, блок 29 определения 20 а выход через второй ключевой элемент направления вращения, вход которого соединен с входом Опока запоминания соединен с выходом третьего блока 20 на операционном усилителе, выход косуммирования, а выходы - с вторым торого является выходом блока 23. входом системы 15 управления инверПри этом на управляющий вход первого тором, при этом второй вход блока 23 ключевого элемента поступают импульизмерения фазового запаздывания авсы с выхода первого устройства дифтономного инвертора тока соединен с ференцирования, вход которого соедивыходами системы 15 управления инвернен с выходом системы управления интором, а третий вход -с выходом дат- > вертором, а на управляющих вход вточиков 17 тока двигателя. рого ключевого элемента поступают 30 импульсы с выхода второго устройства Блок 6 задания частоты может быть дифференцирования, вход которого соевыполнен, например, в виде потенциодинен с нуль-индикатором, на вход метра, подключенного к источнику поскоторого подаются сигналы с датчиков тоянного напряжения. Задатчик 7 инфазных токов двигателя. тенсивности представляет собой ин35 тегратор, охваченный отрицательной Блок 29 определения направления обратной связью, выполненный на опевращения представляет собой нуль-инрационном усилителе» дикатор , выполненный на операционном усилителе, на выходе которого посРегулятор 10 ЭДС и регулятор 13 ледовательно включены два логических тока представляют собой пропорцио40 элемента НЕ. С выхода одного из них нально-интегральные регуляторы, выснимается логический сигнал В ("Впеполненные на операционных усилитеред"), с выхода другого - Н ("Назад"), лях. Датчик 12 тока преобразователя представляет собой шунт постоянного Устройство для управления многотока. Датчики 17 тока и 18 напряжения двигательным электроприводом перемен45 ного тока работает следующим образом. двигателя представляют собой соответственно трансформаторы тока и трехНа выходе задатчика 7 интенсивносфазный трансформатор напряжения. Датти получают сигнал задания частоты чик 16 ЭДС содержит три фазных сумвращения двигателя 00 (индекс "О" мирующих усилителя, выходы которых здесь и далее обозначает синхронный 50 масштаб времени). На выходе первого подключены к блоку выпрямления, выход которого является выходом датчиблока 19 дифференцирования получаем ка ЭДС. При этом на вход каждого фазd производную — характеризующую ного суммирующего усилителя поступают dt сигналы фазного напряжения с датчика момент двигателя (скольжение £ t ) . напэяжения двигателя, фазного тока с 55 На выходе первого функционального . с датчика тока двигателя и пропреобразователя 21 выделяется сигнал изводной фазного тока, а на выходе arctg ^(фазовый угол положения векусилителя формируется сигнал фазной тора тока статора Ї, относительно ЗДС. Первый функциональный преобразо 1422358 6 потокосцепления ротора іу ) , который дания тока и частоты, позволяет повыдифференцируется во втором блоке 22сить производительность механизмов дифференцирования. В блоке 20 происс высокодинамичными приводами за счет ходит суммирование сигналов ^ 0 и сигкачественного регулирования в пускотормозных режимах. нала - - — с выхода блока 22. Резульdt тирующий сигнал с выхода бчока 20 Ф о р м у л а и з о б р е т е н и я после выпрямления в блоке 26 поступает на первый вход четвертого.блока Устройство для управления много25 суммирования, на второй вход котодвигательным электроприводом переменрого поступает после дифференцированого т о к а , содержащее преобразования в блоке 24 сигнал фазового запазтель частоты, составленный из последывания инвертора Ц п , физическая > довательно соединенных управляемого сущность и принцип измерения которовыпрямителя, дросселя и автономного го описаны. Результирующий сигнал с инвертора тока, причем выходы преобвыхода четвертого блока 25 суммироразователя частоты предназначены для вания в качестве сигнала задания часподключения к группе асинхронных к о тоты инвертора поступает на вход сисроткозамкнутых двигателей, блок задатемы 15 управления инвертором. ния частоты, выходом подключенный к Поскольку привод может быть ревходу задатчика интенсивности, выход версивным, необходимо не только выдекоторого подключен к первому входу ление модуля сигнала(частоты (блок первого блока суммирования, второй 26), но и определение его знака. Опвход которого соединен с выходом ределение знака производится в блоке 25 датчика ЭДС, входы которого соедине29, с выходов которого снимаются сигны с выходами датчиков тока и напналы В ("Вперед") и U ("Назад"), ряжения д в и г а т е л я , а выход первого представляющие собой логические сигблока суммирования подключен к входу налы " 0 " и "і". При направлении врадля делимого блока деления, выход щения "Вперед" В=1, Н=0, при вращекоторого подключен к входу р е г у л я нии "Назад" В=0, Н=1. Эти логические 30 тора ЭДС, выходом подключенного к сигналы поступают в систему 15 управпервому входу второго блока суммироления инвертором, где используются вания, второй вход которого соединен для пересчетного кольца, , . с датчиком тока преобразователя ч а с Одновременно сигнал — - ^ (/О с 35 тоты, а выход - с входом регулятора т о к а , при этом выход последнего подвыхода первого блока 19 дифференциключен к входу первой системы управрования после выпрямления в блоке 27 ления, выходы которой соединены с поступает на вход второго функциональуправляющими входами выпрямителя, ного преобразователя 28, реализующего зависимость I , = f ( p 1 ) n p n Vj-.const.40 вторую систему управления, выходы Сформированный на выходе функциональкоторой соединены с управляющими вхо ного преобразователя 28 сигнал з а д а дами автономного инвертора тока, ния тока 4I поступает на третий о т л и ч а ю щ е е с я тем, что, с целью повышения быстродействия в дивход второго блока 11 суммирования 45 намических режимах разгона и тормои отрабатывается замкнутой системой жения, введены три блока дифференавтоматического регулирования т о к а , цирования, первый и второй функциот . е . в системе существует у з е л , о б е с нальные преобразователи, реализующие печивающий быстродействующее формисоответственно функции arctg p 2 и рование управляющего сигнала тока нз условия обеспечения требуемого момен-50 I j - f ( / 5 2 ) , где / з 2 - абсолютное скольта при i t < 1 =const. При наличии такого жение асинхронного двигателя; I,, устройства регулятор ЭДС в режимах ток фазы д в и г а т е л я , третий и ч е т в е р разгона и торможения выполняет роль тыи блоки суммирования, два блока корректирующего у с т р о й с т в а . выделения модуля, блок измерения фаТаким образом, введение в у с т р о й с - 55 зового запаздывания инвертора, блок тво управления многодвигательным определения направления вращения,при электроприводом переменного тока у э этом выход задатчика интенсивности лов, реализующих эффективное быстроподключен к первому входу третьего действующее формирование сигналов заблока суммирования и к входу первого 8 1422358 блока дифференцирования, выход коточетвертого блока суммирования, второй рого соединен с вторым входом третьевход которого через третей блок дифго блока суммирования, через послеференцирования подключен к выходу блодовательно соединенные первый функка измерения фазовог'о запаздывания циональный преобразователь и второй инвертора, а выход четвертого блока блок дифференцирования с третьим суммирования с первым входом системы входом третьего блока суммирования управления инвертором, с входом для и через последовательно соединенные делителя блока деления и с первым второй блок выделения модуля и втовходом блока измерения фазового за10 рой функциональный преобразователь паздывания, второй вход которого с третьим входом второго блока сумсоединен с выходами системы управлемирования, выход третьего блока сумния инвертором, а третий вход - с мирования подключен к входу блока опревыходами датчиков тока двигателя, деления направления вращения и к входу причем выход блока определения нап15 первого блока выделения модуля, выравления вращения соединен с вторым ход которого соединен с первым входом входом системы управления инвертором^ Составитель В.Тарасов Редактор Л.Зайцева Техред м .Дидык Корректор И.Муска Заказ 4439/55 Тираж 583 . Подписное В И П Государственного комитета СССР НИИ по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5 Производственно-полиграфическое предприятие, г . Ужгород, ул. Проектная^ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice to control multiengined ac electric drive
Автори англійськоюBohatyriov Vadym Pavlovych, Epshtein Isaak Izrailiovych
Назва патенту російськоюУстройство для управления многодвигательным электроприводом переменного тока
Автори російськоюБогатырев Вадим Павлович, Эпштейн Исаак Изральвич
МПК / Мітки
МПК: H02P 5/74
Мітки: електроприводом, струму, багатодвигуним, устрій, управління, зміного
Код посилання
<a href="https://ua.patents.su/6-8584-ustrijj-do-upravlinnya-bagatodvigunim-elektroprivodom-zminogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Устрій до управління багатодвигуним електроприводом зміного струму</a>
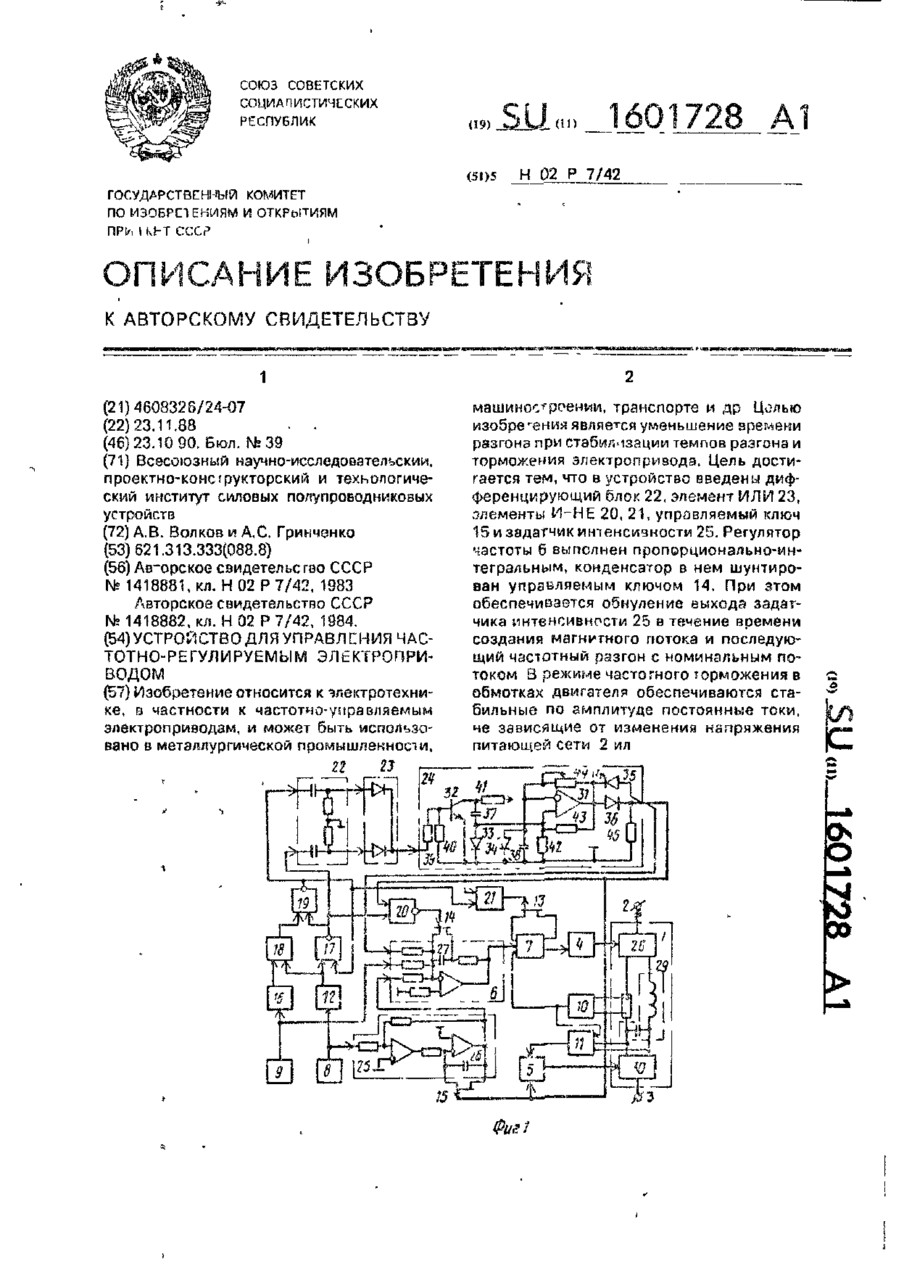
Пристрій для керування частотно-регулівним електроприводом
Номер патенту: 8822
Опубліковано: 30.09.1996
Автори: Волков Олександр Васильович, Грінченко Олександр Семенович
МПК: H02P 27/04
Мітки: керування, електроприводом, частотно-регулівним, пристрій
Формула / Реферат:
Устройство для управления частотно-регулируемым электроприводом, содержащее статический преобразователь частоты, снабженный клеммами для подключения питающей сети и асинхронного двигателя, системы управления напряжением и частотой, подключенные выходами к соответствующим управляющим входам статического преобразователя частоты, регулятор частоты и регулятора тока, каждый с двумя входами, узел задания, датчик частоты вращения, датчики тока...
Тірісторний пристрій для управління та захисту електромагнітної муфти привода гірничої машини
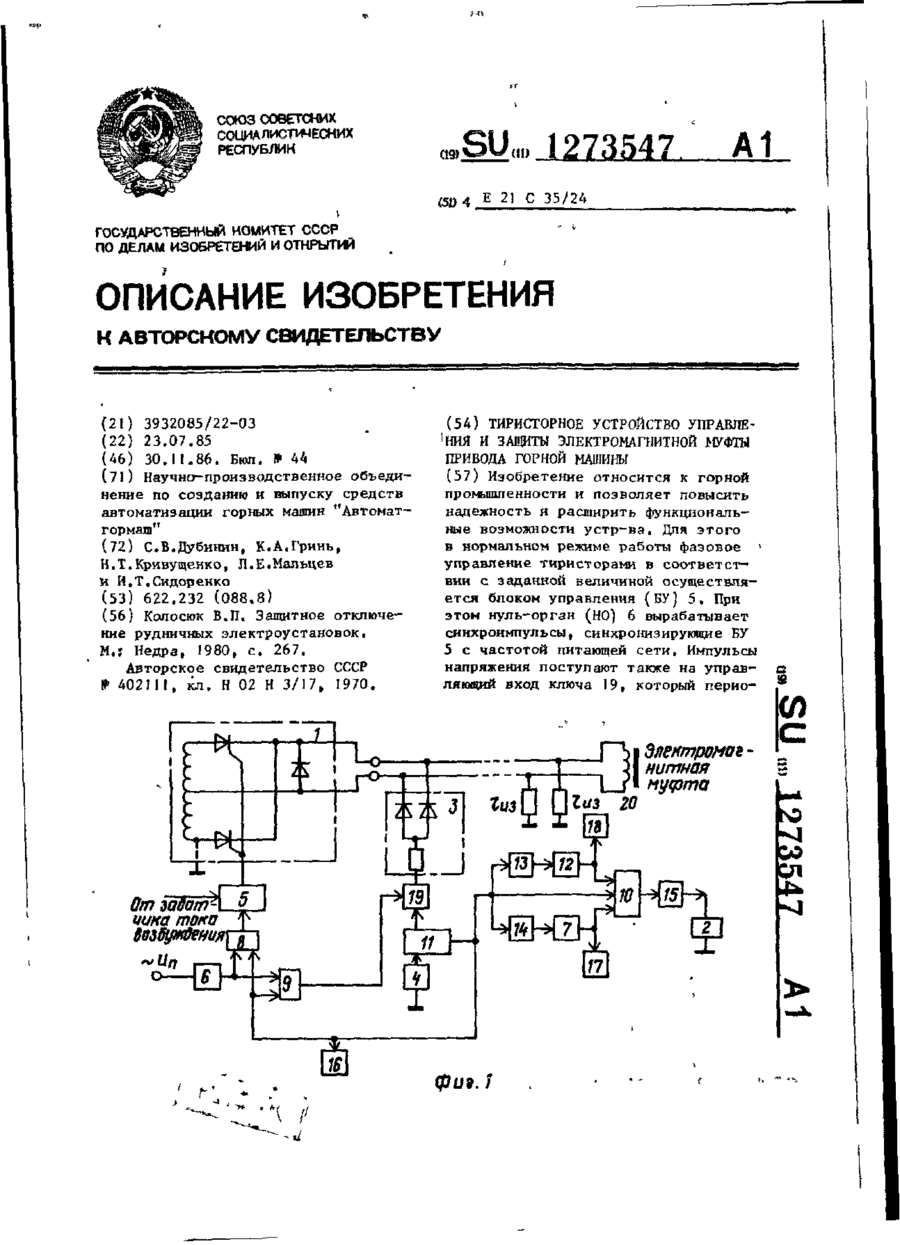
Номер патенту: 7611
Опубліковано: 29.09.1995
Автори: Гринь Костянтин Афанасійович, Дубінін Сергій Васильович, Сидоренко Іван Тимофійович, Кривущенко Микола Тимофійович, Мальцев Леонід Єгорович
МПК: E21C 35/24
Мітки: машини, управління, захисту, гірничої, муфти, привода, тиристорний, пристрій, електромагнітної
Формула / Реферат:
Тиристорнеє устройство управлений и защиты электромагнитной муфты привода горной машины, содержащее источник переменного напряжения, источник постоянного напряжения, первый фильтр, электромагнитное реле, блок управления тиристорами, выход которого связан с управляющим входом тиристорного выпрямителя, выходные клеммы которого подключены к нагрузке, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей...
Пристрій для захисту від перевищення допустимої частоти обертання електродвигуна постійного струму
Номер патенту: 2794
Опубліковано: 26.12.1994
Автори: Бардамід Василь Іванович, Монаєв Віктор Іванович
МПК: H02H 7/093
Мітки: обертання, пристрій, допустимої, електродвигуна, захисту, частоти, струму, постійного, перевищення
Формула / Реферат:
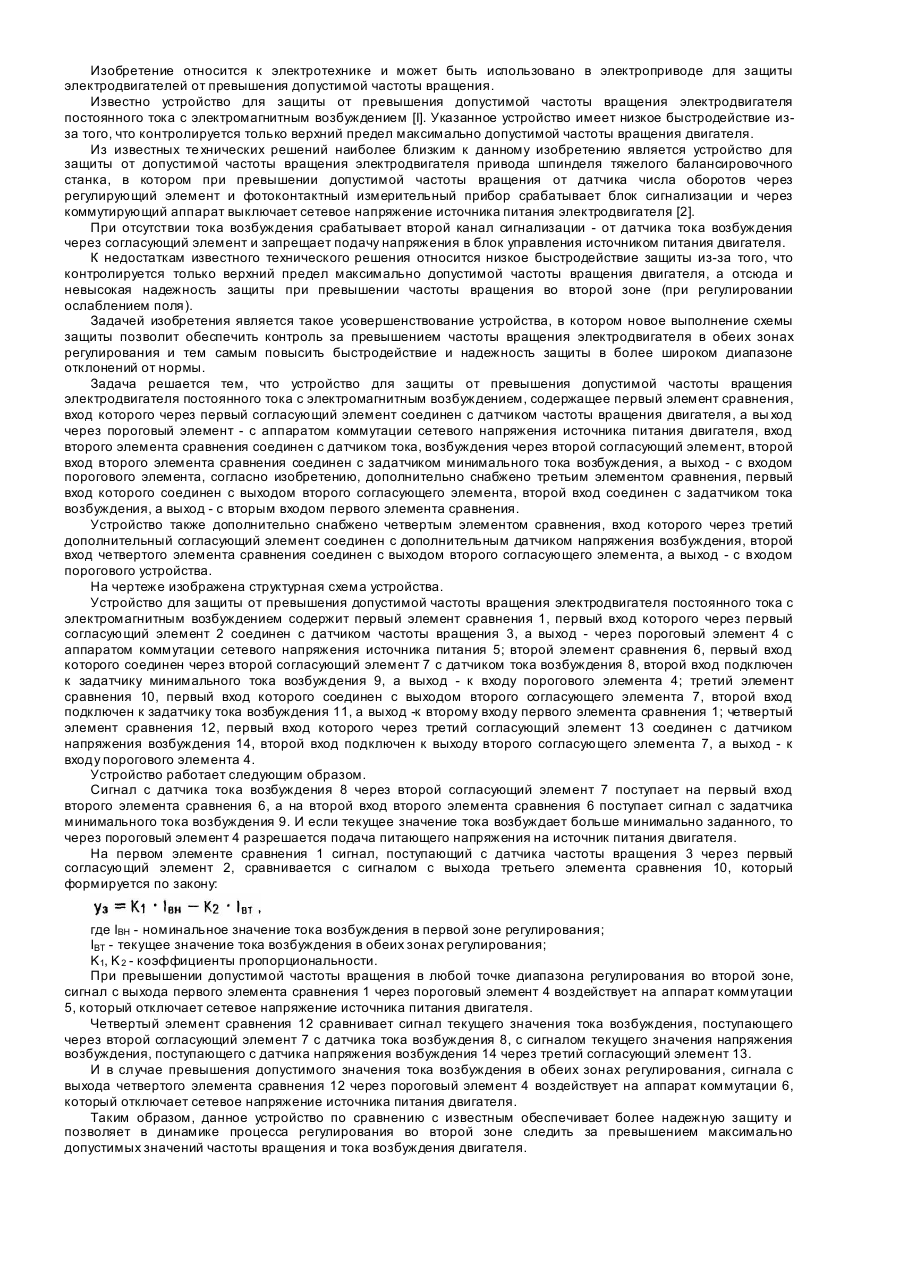
1. Устройство для защиты от превышения допустимой частоты вращения электро-двигателя постоянного тока с электромагнитным возбуждением, содержащее первый элемент сравнения, вход которого через первый согласующий элемент соединен с датчиком частоты вращения двигателя, а выход через пороговый элемент - с аппаратом коммутации сетевого напряжения источника питания двигателя, вход второго элемента сравнения соединен с датчиком тока возбуждения...
Пристрій автоматичного управління виїмковою машиною
Номер патенту: 7597
Опубліковано: 29.09.1995
Автори: Клименко Володимир Іванович, Захаров Володимир Миколаєвич, Бакуменко Володимир Степанович, Сірченко Володимир Миколайович, Кіріченко Костянтин Іванович
МПК: E21C 35/24
Мітки: пристрій, машиною, автоматичного, управління, виїмковою
Формула / Реферат:
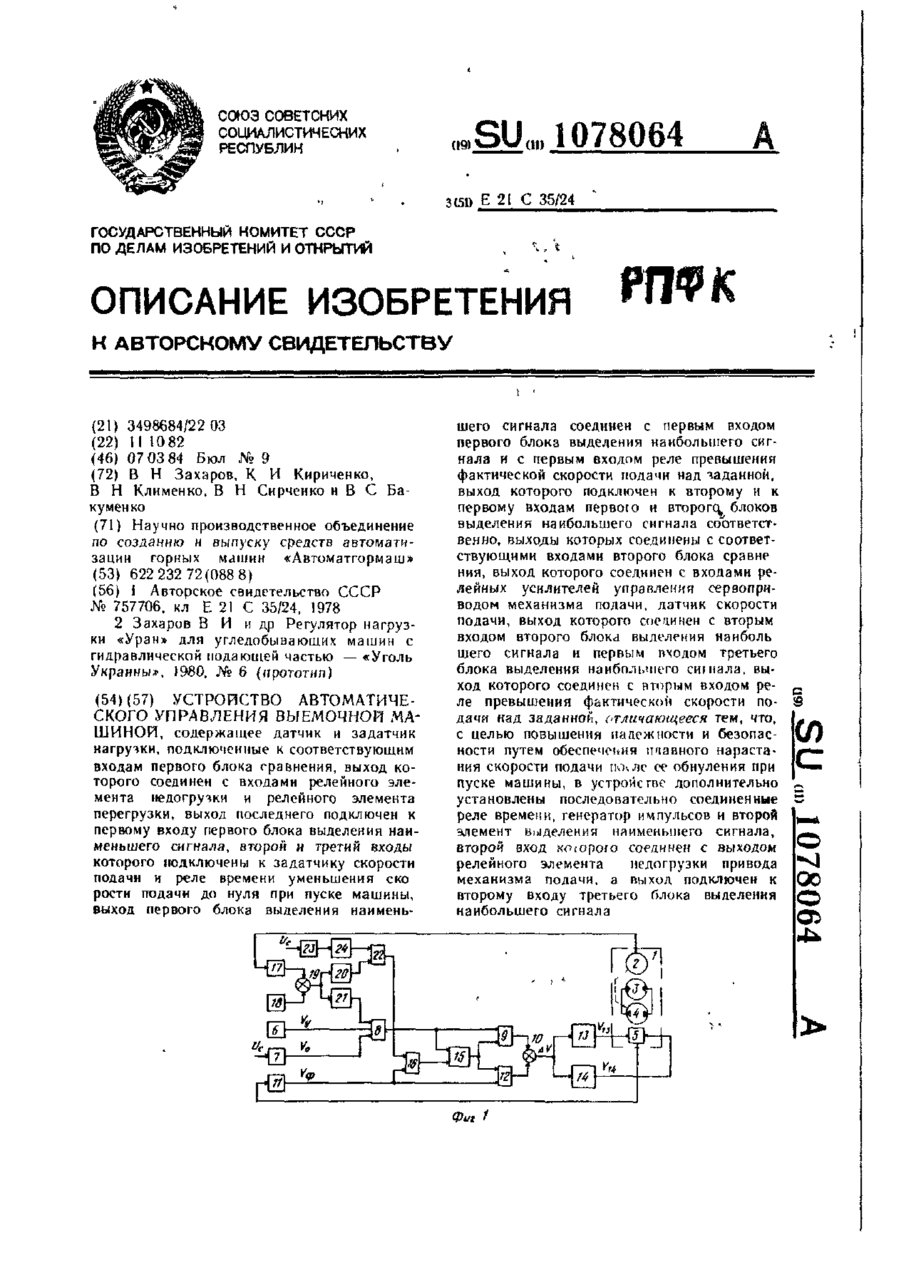
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик нагрузки, подключенные к соответствующим входам первого блока сравнения, выход которого соединен с входами релейного элемента недогрузки и релейного элемента перегрузки, выход последнего подключен к первому входу первого блока выделения наименьшего сигнала, второй и третий входы которого подключены к задатчику скорости подачи и реле времени уменьшения...
Пристрій для вимірювання амплітудного значення імпульсів зварювального струму
Номер патенту: 8463
Опубліковано: 30.09.1996
Автори: Руденко Петро Михайлович, Подола Микола Васильович, Гавриш Валерій Семенович
МПК: B23K 11/24
Мітки: імпульсів, зварювального, значення, амплітудного, пристрій, вимірювання, струму
Формула / Реферат:
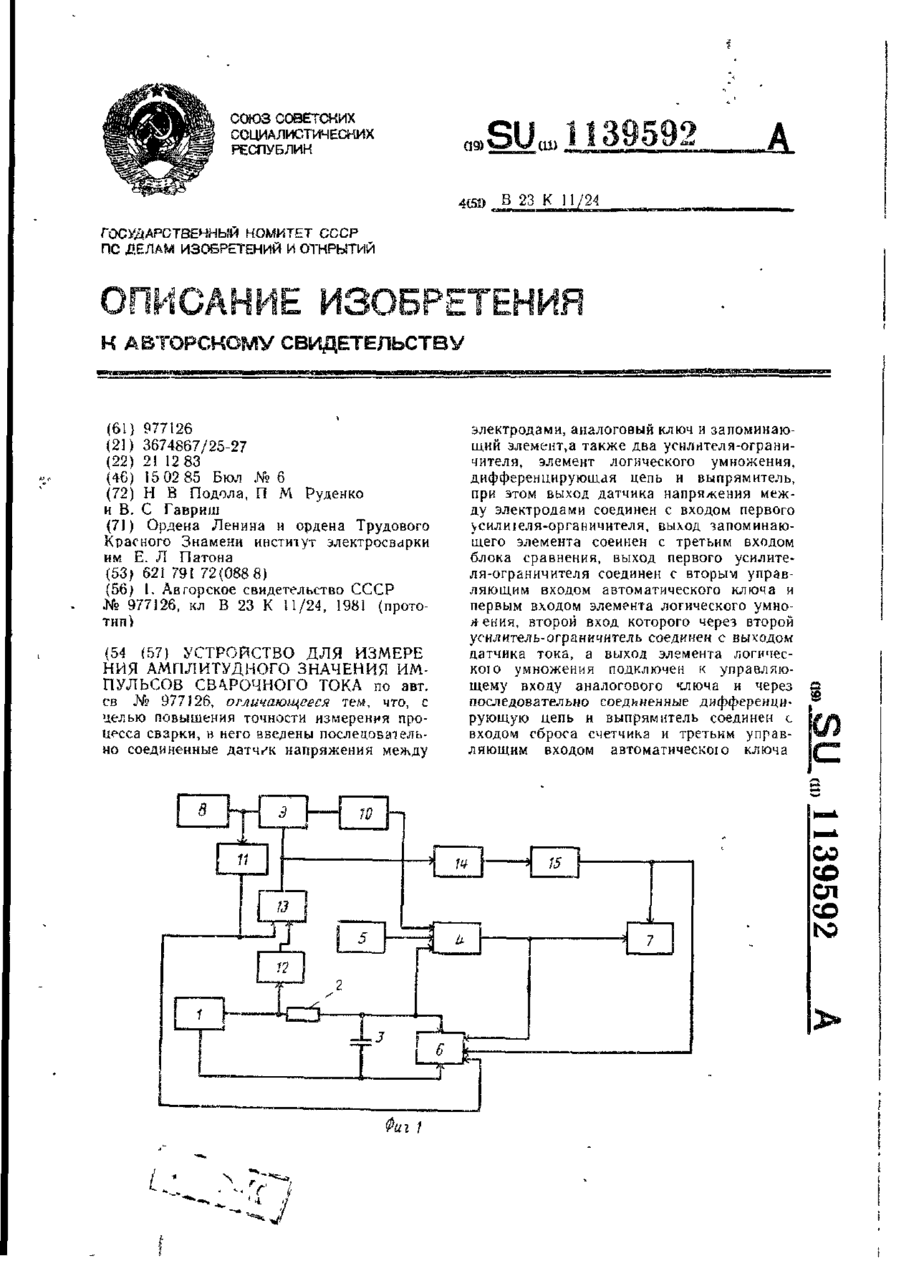
Устройство для измерения амплитудного значения импульсов сварочного тока по авт. св. № 977126, отличающееся тем, что, с целью повышения точности измерения процесса сварки, в него введены последовательно соединенные датчик напряжения между электродами, аналоговый ключ и запоминающий элемент, а также два усилителя-ограничителя, элемент логического умножения, дифференцирующая цепь и выпрямитель, при этом выход датчика напряжения между...
Попередній патент: Частотно-регульований асинхроний електропривод
Наступний патент: Устрій до управління електроприводом зміного струму
Випадковий патент: Гнучкий бункер