Оптичний пристрій та спосіб перевірки нахилу контейнера
Номер патенту: 87130
Опубліковано: 25.06.2009
Автори: Чен Цзи, Андерсон Уільям Х., Граф Стівен М., Рінглайен Джеймс А., Джувінол Джон У.
Формула / Реферат
1. Пристрій контролю нахилу контейнера, що має дно, який містить:
- контейнер (34), що має вісь (А) обертання та опорну поверхню (62), яка формується дном контейнера або будь-якою нижньою осьовою поверхнею;
- пристосування (24, 26, 28) для втримання контейнера (34) на місці й обертання контейнера навколо осі (А);
- джерело світла (50) для направлення світла на дно контейнера;
- світлочутливий датчик (54) для одержання світла від контейнера, і
- процесор обробки даних (56) для визначення нахилу контейнера,
який відрізняється тим, що
- джерело світла (50) розташоване нижче за контейнер (34) й служить для спрямування світлових променів на опорну поверхню (62) контейнера, який утримують пристосування (24, 26, 28),
- зазначений світлочутливий датчик (54) розташований нижче за контейнер (34) та служить для одержання частини світлових променів від названого джерела світла (50), відбитих від опорної поверхні (62), та
- зазначений процесор (56) обробки даних з'єднаний зі світлочутливим датчиком (54) і служить для визначення величини віддалення опорної поверхні (62) контейнера від площини, що перпендикулярна до зазначеної осі (А), як функції параметрів відбитих світлових променів й параметрів обертання контейнера.
2. Пристрій за п. 1, який відрізняється тим, що контейнер (34) має накатку (134, 136) на опорній поверхні (62) контейнера й зазначений процесор обробки даних (56) за згаданими відбитими світловими променями має можливість визначати глибину накатки.
3. Пристрій за п. 1 або 2, який відрізняється тим, що процесор обробки даних (56) містить попередній процесор (96), що служить для зчитування даних зі світлочутливого датчика (54) при перших приростах кута повороту контейнера, і головний процесор (98), що служить для одержання зчитаних даних із попереднього процесора при других приростах кута повороту контейнера, більших ніж перші прирости.
4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що пристосування (24, 26, 28) для втримання контейнера (34) у вихідному положенні й обертання контейнера навколо осі (А) містить віддалені один від одного допоміжні ролики (26, 28), що служать для зовнішнього зчеплення з контейнером, і ролик привода (24), що служить для зчеплення й обертання контейнера, у той час як контейнер утримується навпроти допоміжних роликів, що дає можливість визначити зазначену вісь (А) як середню вісь обертання (А), яка залежить від форми контейнера та відстані між допоміжними роликами (26, 28).
5. Пристрій за будь-яким з пп. 1-4, який відрізняється тим, що містить два джерела світла (50) і два світлочутливих датчики (54), розташованих попарно на діаметрально протилежних сторонах опорної поверхні контейнера, причому процесор обробки даних (56) реагує на вихідні сигнали зі світлочутливих датчиків (54) для визначення нахилу контейнера (34), який контролюють.
6. Пристрій за будь-яким з пп. 1-5 для контролю опорної поверхні (62), що має множину накаток, який відрізняється тим, що світлове джерело (50) й датчик (54) виконані таким чином, що через накатку світлочутливий датчик (54) одержує не безперервні відбиття від виступу (134) і западини (136) накатки.
7. Пристрій за п. 6, який відрізняється тим, що вихідний сигнал датчика (54) містить щонайменше перші вихідні сигнали, що відповідають відбиттям (142) від виступу накатки (134), і другі вихідні сигнали, що відповідають відбиттям (144) від западини накатки (136).
8. Спосіб контролю нахилу контейнера (34), що має вісь (А) обертання та опорну поверхню (62), яка формується дном контейнера або будь-якою нижньою осьовою поверхнею контейнера, який містить наступні етапи:
а) поміщають джерело світла (50) переважно навпроти опорної поверхні (62) знизу;
б) поміщають світлочутливий датчик (54) переважно навпроти опорної поверхні (62) знизу;
в) обертають контейнер навколо осі (А);
г) включають джерело світла (50) переважно навпроти опорної поверхні (62);
д) поміщають світлочутливий датчик (54) в положення, при якому на нього падає відбите світло джерела (50), та
е) аналізують в цьому положенні дані для визначення величини віддалення опорної поверхні (62) контейнера від площини, що перпендикулярна до осі (А).
9. Спосіб за п. 8, який відрізняється тим, контрольована опорна поверхня (62) є накатаною поверхнею.
10. Спосіб за п. 8, який відрізняється тим, що етап д) включає стиснення даних, одержаних при зазначеному положенні датчика.
11. Спосіб за п. 8, який відрізняється тим, що етап е) включає використання синусоїдального виразу для моделювання опорної поверхні контейнера (34).
12. Спосіб за п. 8, який відрізняється тим, що одну або більше змінних синусоїдального виразу знаходять з використанням методу найменшої квадратичної похибки.
13. Спосіб за п. 8, який відрізняється тим, що названий процесор обробки даних (56) пристосовано для використання перших вихідних сигналів для визначення нахилу контейнера.
14. Спосіб за п. 8 або 13, який відрізняється тим, що названий процесор обробки даних (56) пристосовано для використання як перших, так і других вихідних сигналів для визначення перерізу глибини накатки.
15. Спосіб за будь-яким з пп. 8-14, який відрізняється тим, що процесор обробки даних (56) пристосовують для генерування синусоїдального виразу, що відповідає різниці висот між двома розділеними точками на опорній поверхні.
16. Спосіб за п. 15, який відрізняється тим, що процесор обробки даних (56) використовує метод найменшої квадратичної похибки для обчислення значення однієї або більше змінної синусоїдального виразу.
17. Спосіб за п. 16, який відрізняється тим, що обчислені значення використовують для визначення нахилу контейнера.
18. Спосіб за п. 16 або 17, який відрізняється тим, що процесор обробки даних (56) використовує метод ітеративного пошуку для визначення синусоїдального циклу синусоїдального виразу.
19. Спосіб за п. 18, який відрізняється тим, що метод ітеративного пошуку є пошуком золотого перерізу.
20. Спосіб за п. 16, який відрізняється тим, що процесор обробки даних (56) для підвищення ефективності методу найменшої квадратичної похибки використовує також методику вибору точок, що включає точки мінімаксу.
Текст
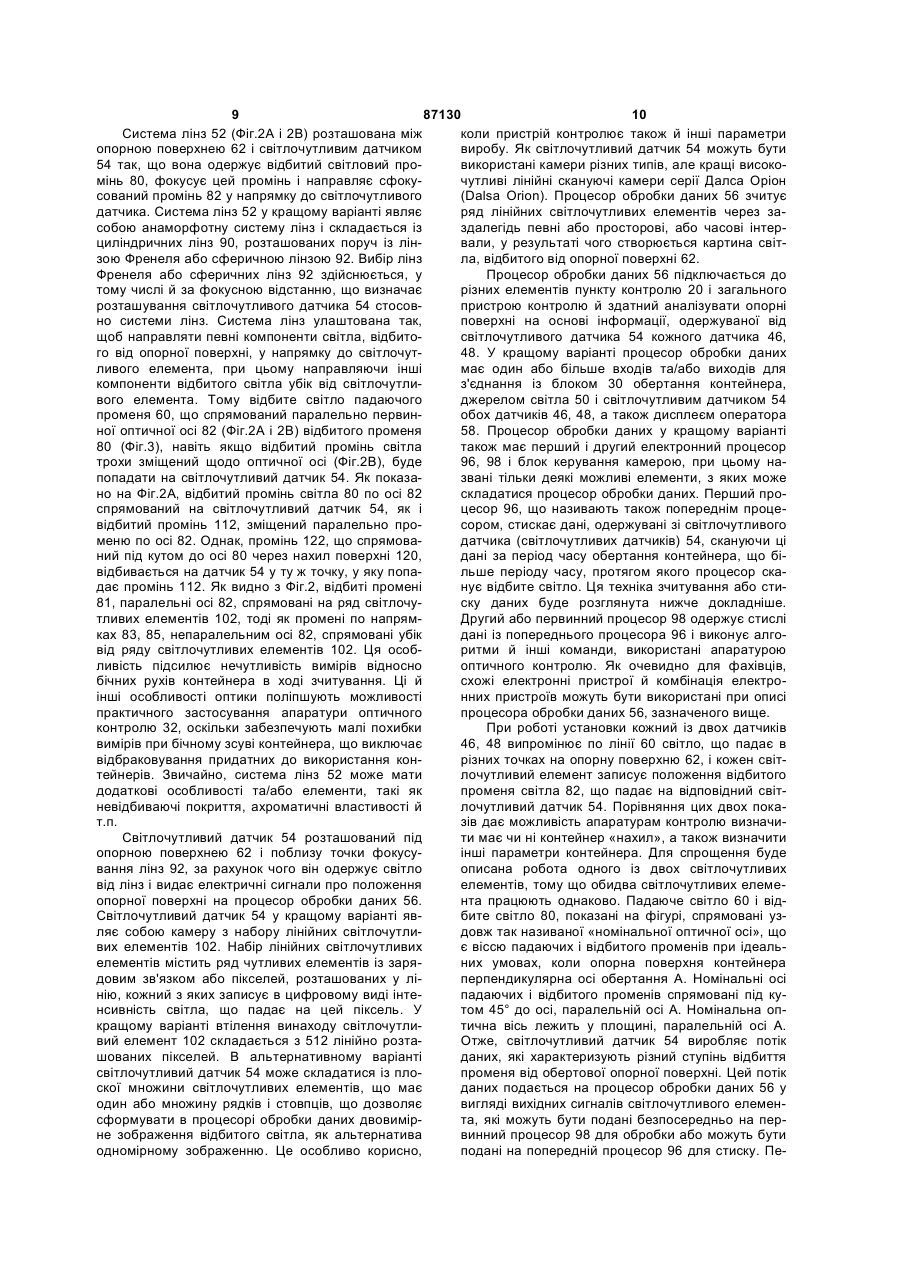
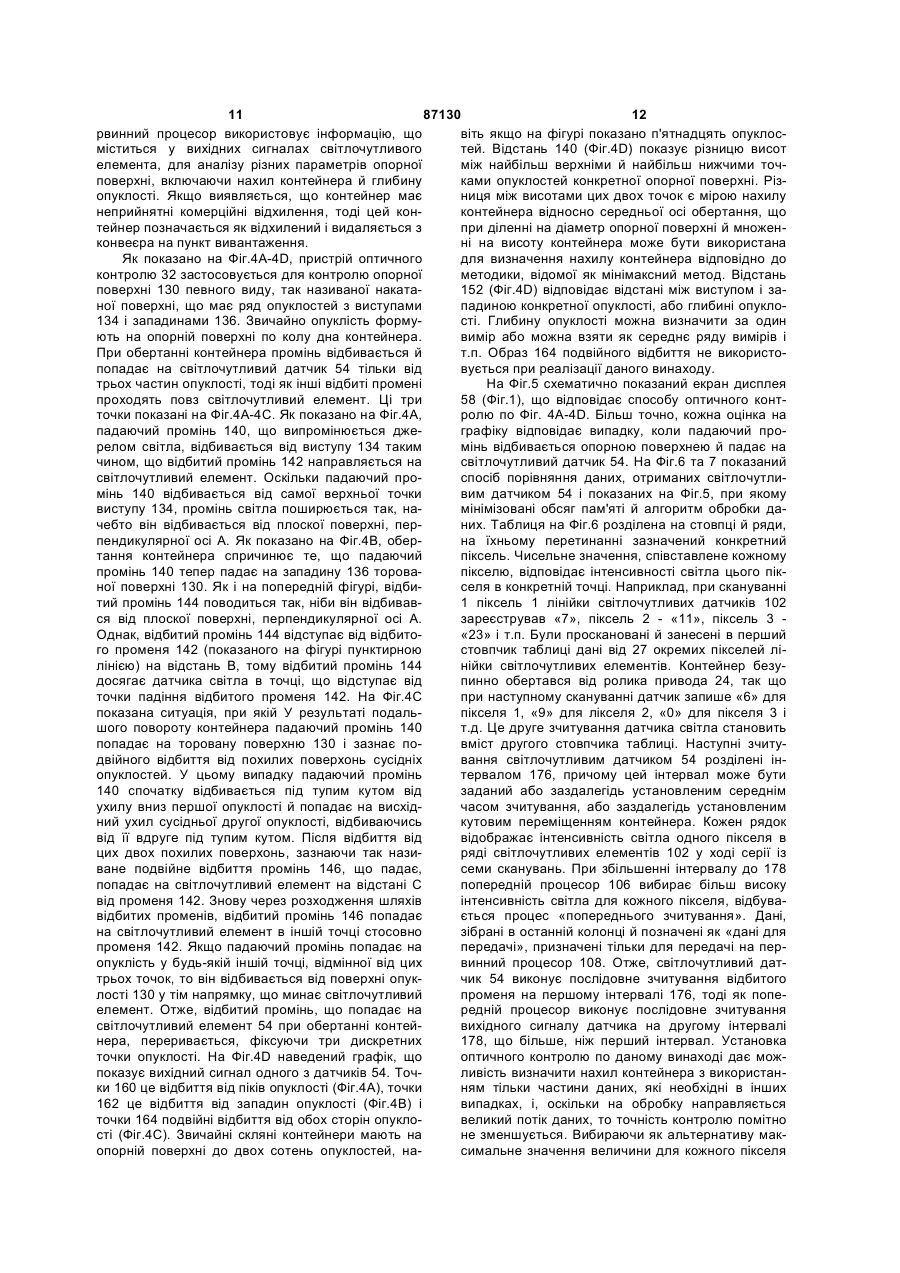
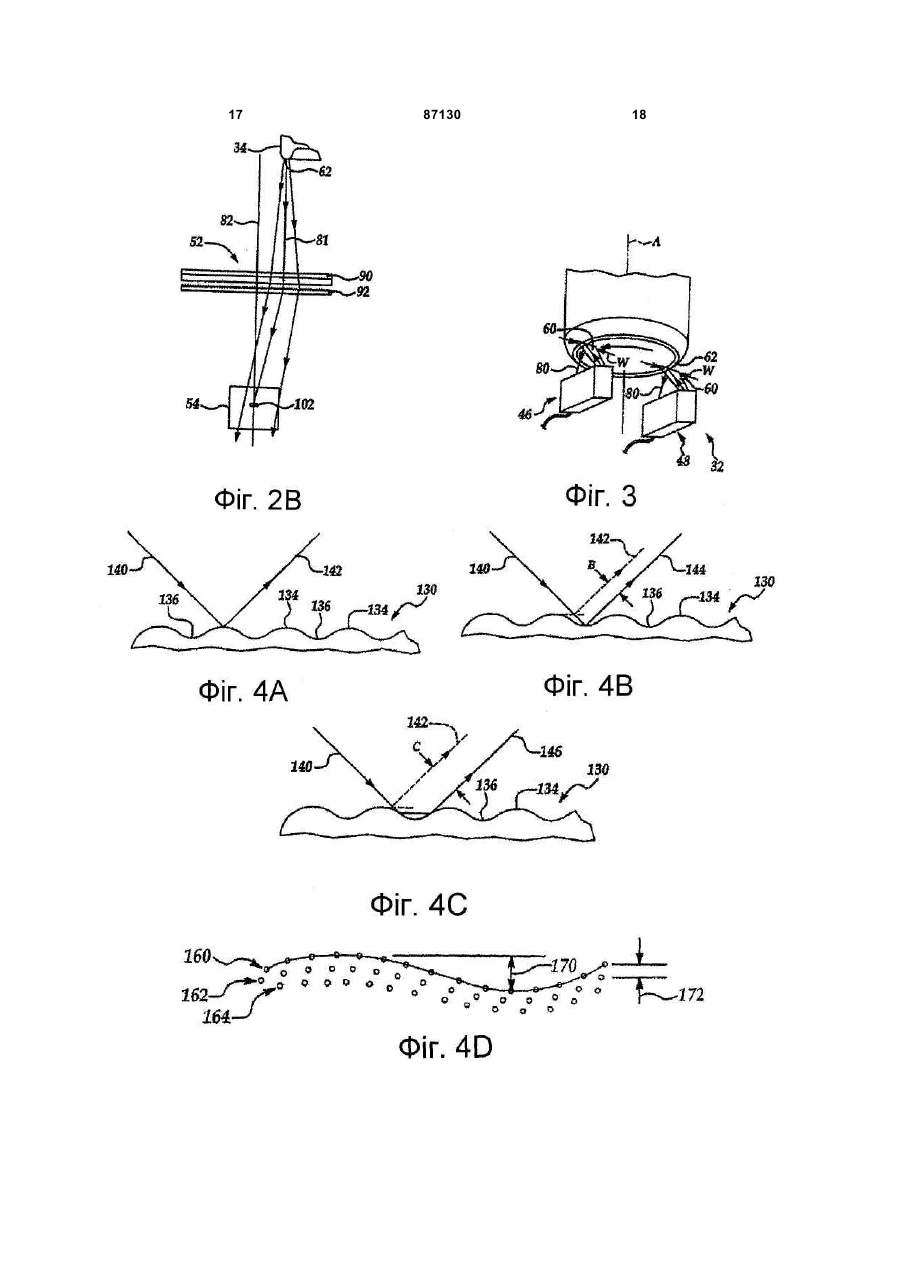
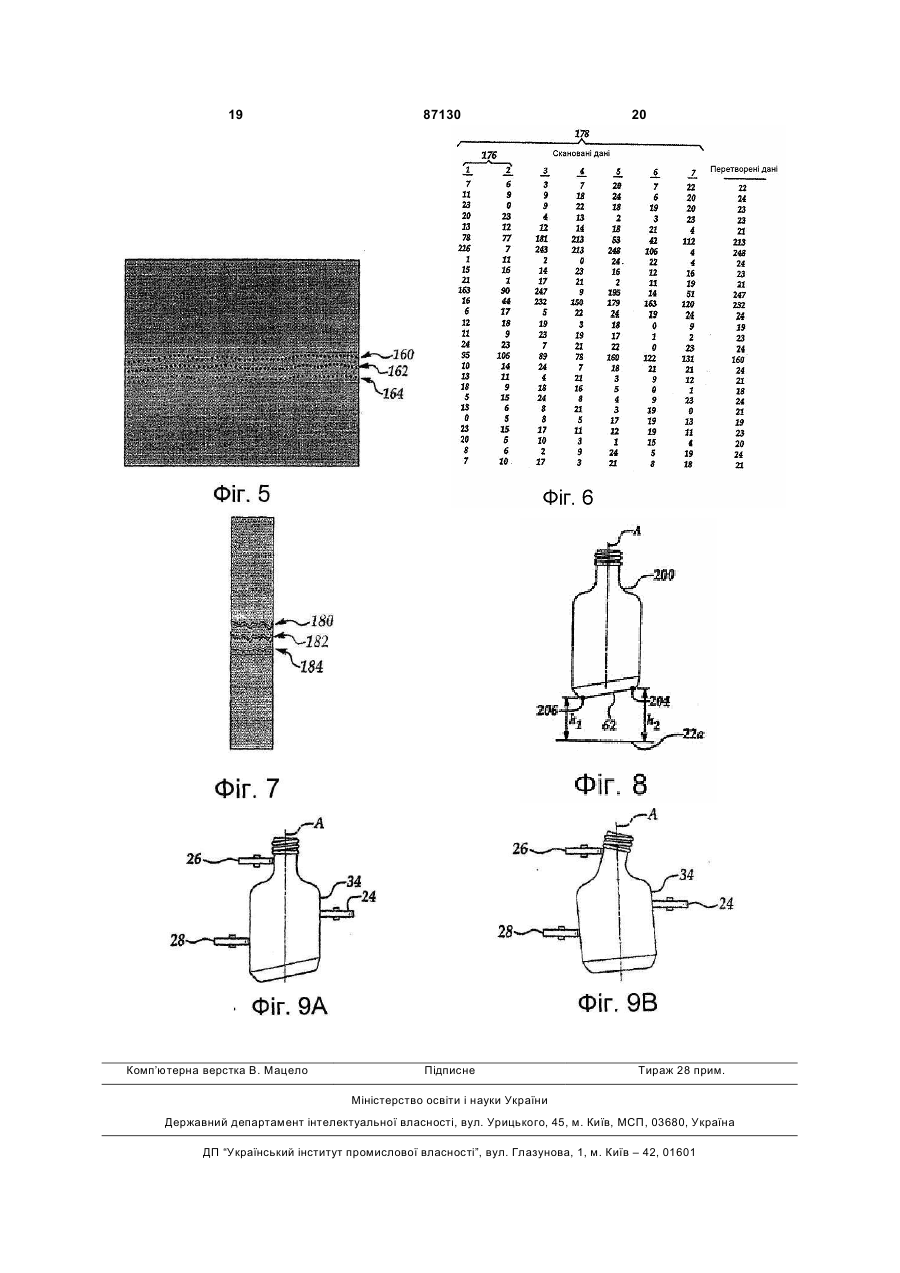
1. Пристрій контролю нахилу контейнера, що має дно, який містить: - контейнер (34), що має вісь (А) обертання та опорну поверхню (62), яка формується дном контейнера або будь-якою нижньою осьовою поверхнею; - пристосування (24, 26, 28) для втримання контейнера (34) на місці й обертання контейнера навколо осі (А); - джерело світла (50) для направлення світла на дно контейнера; - світлочутливий датчик (54) для одержання світла від контейнера, і - процесор обробки даних (56) для визначення нахилу контейнера, який відрізняється тим, що - джерело світла (50) розташоване нижче за контейнер (34) й служить для спрямування світлових променів на опорну поверхню (62) контейнера, який утримують пристосування (24, 26, 28), - зазначений світлочутливий датчик (54) розташований нижче за контейнер (34) та служить для одержання частини світлових променів від названого джерела світла (50), відбитих від опорної поверхні (62), та - зазначений процесор (56) обробки даних з'єднаний зі світлочутливим датчиком (54) і служить для визначення величини віддалення опорної поверхні (62) контейнера від площини, що перпендикулярна 2 (19) 1 3 87130 4 перші вихідні сигнали, що відповідають відбиттям знаходять з використанням методу найменшої (142) від виступу накатки (134), і другі вихідні сигквадратичної похибки. нали, що відповідають відбиттям (144) від запади13. Спосіб за п. 8, який відрізняється тим, що ни накатки (136). названий процесор обробки даних (56) пристосо8. Спосіб контролю нахилу контейнера (34), що вано для використання перших вихідних сигналів має вісь (А) обертання та опорну поверхню (62), для визначення нахилу контейнера. яка формується дном контейнера або будь-якою 14. Спосіб за п. 8 або 13, який відрізняється тим, нижньою осьовою поверхнею контейнера, який що названий процесор обробки даних (56) пристомістить наступні етапи: совано для використання як перших, так і других а) поміщають джерело світла (50) переважно навихідних сигналів для визначення перерізу глибивпроти опорної поверхні (62) знизу; ни накатки. б) поміщають світлочутливий датчик (54) перева15. Спосіб за будь-яким з пп. 8-14, який відрізняжно навпроти опорної поверхні (62) знизу; ється тим, що процесор обробки даних (56) прив) обертають контейнер навколо осі (А); стосовують для генерування синусоїдального виг) включають джерело світла (50) переважно наразу, що відповідає різниці висот між двома впроти опорної поверхні (62); розділеними точками на опорній поверхні. д) поміщають світлочутливий датчик (54) в поло16. Спосіб за п. 15, який відрізняється тим, що ження, при якому на нього падає відбите світло процесор обробки даних (56) використовує метод джерела (50), та найменшої квадратичної похибки для обчислення е) аналізують в цьому положенні дані для визназначення однієї або більше змінної синусоїдальночення величини віддалення опорної поверхні (62) го виразу. контейнера від площини, що перпендикулярна до 17. Спосіб за п. 16, який відрізняється тим, що осі (А). обчислені значення використовують для визна9. Спосіб за п. 8, який відрізняється тим, контрочення нахилу контейнера. льована опорна поверхня (62) є накатаною повер18. Спосіб за п. 16 або 17, який відрізняється хнею. тим, що процесор обробки даних (56) використо10. Спосіб за п. 8, який відрізняється тим, що вує метод ітеративного пошуку для визначення етап д) включає стиснення даних, одержаних при синусоїдального циклу синусоїдального виразу. зазначеному положенні датчика. 19. Спосіб за п. 18, який відрізняється тим, що 11. Спосіб за п. 8, який відрізняється тим, що метод ітеративного пошуку є пошуком золотого етап е) включає використання синусоїдального перерізу. виразу для моделювання опорної поверхні кон20. Спосіб за п. 16, який відрізняється тим, що тейнера (34). процесор обробки даних (56) для підвищення 12. Спосіб за п. 8, який відрізняється тим, що ефективності методу найменшої квадратичної поодну або більше змінних синусоїдального виразу хибки використовує також методику вибору точок, що включає точки мінімаксу. Цей винахід стосується головним чином перевірки виробів, таких як скляні контейнери, а більш конкретно - способів і пристроїв оптичного контролю нахилу контейнерів, а також контролю інших параметрів опорних поверхонь контейнерів. При виробництві скляних виробів, таких як скляні контейнери, можуть виникати різні виробничі дефекти або відхилення, які впливають на комерційну цінність контейнера. Ці виробничі дефекти, або так називані «комерційні відхилення» можна розглядати як одну із численних характеристик контейнерів. Наприклад, комерційні відхилення можуть мати відношення до лінійних характеристик нижньої або опорної поверхні контейнера, горлечка контейнера або поверхні ущільнення контейнера, а також можуть мати місце такі відхилення як вкраплення або дефекти горлечка контейнера, бічної стінки або дна. На практиці для контролю якості контейнера рекомендується напресовувати на кожний контейнер фірмовий знак, що позначає походження контейнера. Таким чином, у будь-якій ситуації необхідно мати устаткування контролю, здатне перевіряти контейнери на наявність комерційних відхилень, наявність напресованого фірмового знака або інших особливос тей, що в результаті дає гарантію якості виробу. Термін «перевірка» використовується в самому широкому розумінні й охоплює будь-які оптичні, електрооптичні, механічні або електричні вимірювання або дії з контейнером, необхідні для вимірювання або визначення параметрів, які можуть змінюватися й до складу яких входять, але не обов'язково, напресовані позначення й комерційні відхилення. Приклад пристрою контролю наведений у патенті США № 3313409, у якому описаний пристрій контролю скляних контейнерів, за яким "зірочка" послідовно переміщує контейнери через серію пунктів контролю. На одному з пунктів перевіряють нахил контейнерів шляхом приведення в контакт опорної поверхні основи контейнера з парою діаметрально протилежних роликів. Як описано в патенті США № 4433785, ролики з'єднані за схемою лінійного змінюваного диференціального трансформатора (LVDT), що виробляє сигнали при обертанні контейнера. Ці сигнали характеризують ступінь відхилення опорної поверхні від площини й/або відхилення від перпендикулярності до осі обертання. Інший пристрій транспортування 5 87130 6 контейнерів через ряд пунктів контролю описаний Винахід, його цілі, особливості й переваги мов патенті США № 6581751. жна краще зрозуміти на основі прикладеного опиУ європейському патенті 1118854 (відповідний су, формули й креслень, на яких зображене наступатент США № 6256095) описаний оптичний припне. стрій контролю поверхні ущільнення, що дозволяє Фіг.1 - блок-схема пункту контролю, у якому вимірювати ступінь нерівності поверхні ущільненвикористовується пристрій оптичного контролю ня за кількістю світла, що відбивається від цієї відповідно даному винаходу. поверхні при обертанні контейнера навколо осі. Фіг. 2А і 2В - більш детальні креслення приХоча пристрої контролю, описані в згаданих строю оптичного контролю по Фіг.1А, причому патентах, мали значний комерційний успіх, всеФіг.2В це вид по напрямку 2В на Фіг.2А. таки поліпшення залишаються затребуваними. Фіг.3 - перспективний вид пристрою контролю Ролики перебувають у контакті із дном контейнера по Фіг.1. й піддаються механічному зношуванню, у резульФіг.4А-4D стосуються оптичного контролю таті точність вимірів знижується. Розміри роликів опорної поверхні з накаткою. можуть обмежувати розміри контейнерів, з якими Фіг.5 - графічне зображення даних на Фіг.4Б. вони можуть працювати, що може вплинути на Фіг.6 - таблиця, що ілюструє спосіб стискуванвеличину відхилень (розділення), що може бути ня даних вимірювання, зібраних оптичними контвиміряна. Отже, метою даного винаходу є створольними приладами. рення пристрою й способу контролю якості конФіг.7 - графічне подання стиснутих даних на тейнерів, які позбавлені згаданих вище недоліків і Фіг.6. дозволяють контролювати дно або опорну поверхФіг.8 показує вид контейнера, що відповідає ню контейнера. способу аналізу опорної поверхні з використанням Цей винахід містить у собі ряд особливостей, методу найменшої квадратичної похибки. які можуть бути здійснені окремо один від іншого Фіг.9А і 9В показують діаграми, які ілюструють або, що краще, у комбінації один з одним. вплив геометрії контейнера на середню вісь оберПристрій контролю нахилу контейнера відпотання. відно до однієї з особливостей даного винаходу Пристрій і спосіб оптичного контролю за цим містить джерело світла, розташоване нижче конвинаходом можуть бути використані для контролю тейнера й направляє світло на опорну поверхню одного з ряду типів контейнерів за різними критеконтейнера, тоді як контейнер утримують у вихідріями, але щонайкраще воно підходить для контному положенні й обертають навколо осі. Світлоролю нахилу нижньої або опорної поверхні скляночутливий датчик, розташований нижче контейнего контейнера. Поняття «опорна поверхня» ра, приймає світло джерела, що відбивається від використовується в самому широкому розумінні й опорної поверхні контейнера. До датчика підклюпоєднує всі нижні поверхні контейнера або нижні чений процесор, що на основі аналізу параметрів осьові поверхні. Це поняття включає опорні повервідбитого світла й швидкості обертання контейнехні, але не обмежується ними, ці поверхні є плосра визначає відхилення опорної поверхні контейкими, полірованими, із гравіруванням та/або з нанера від площини, що перпендикулярна осі. У каткою, а також поверхні, що мають кільцеві кращому варіанті контейнер утримують у вихідновиступаючі посадкові кільця, причому ці кільця є му положенні й обертають навколо осі за допомополірованими, із гравіруванням та/або з накаткою. гою ролика привода, що втримує контейнер напроПриклад установки індексації й контролю, у ти розташованих на одній осі додаткових роликів, якому можуть бути використані пристрій і спосіб завдяки чому визначається середня вісь обертаноптичного контролю за цим винаходом, описаний у ня як функція геометрії контейнера й місця його патенті США № 6581751. На цю установку безурозташування між додатковими роликами. У крапинно подається потік скляних виробів з конвеєра, щому варіанті здійснення винаходу пари джереі ці вироби проходять через ряд розташованих під ло/світлочутливий датчик розташовують на діамекутом пунктів контролю, на кожному з яких контейтрально протилежних сторонах опорної поверхні нер перевіряється на відповідність різним критеріконтейнера, а вимірювання виконують на основі ям. Установка індексації й контролю містить першу порівняння вихідних сигналів датчика. Така консмножину захоплюючих пальців, установлених на трукція забезпечує незалежність вимірів від полонижньому кронштейні, і друга множину захоплююження осі обертання контейнера. чих пальців, установлених на верхньому кронУ відповідності зі способом за цим винаходом штейні. Поворот кронштейнів один щодо одного опорну поверхню контейнера контролюють таким дає можливість множині пальців захоплювати й чином: а) установлюють джерело світла взагалі відпускати скляні вироби між пальцями, тоді як напроти опорної поверхні, б) установлюють світпогоджений поворот кронштейнів дає можливість лочутливий датчик взагалі напроти опорної поверупорядкувати скляні вироби в проміжку між пункхні, в) повертають контейнер щодо його осі, зберітами контролю. Деякі пункти контролю постачені гаючи при цьому його вертикальне положення, г) роликами привода, що служать для повороту конвключають джерело, світло якого відбивається від тейнера відносно його осі з метою контролю або опорної поверхні, д) включають світлочутливий для інших цілей. датчик, щоб зафіксувати положення, при якому Інший приклад установки індексації й контровідбите світло попадає на датчик, і e) аналізують лю, у якому можуть бути використані пристрій і опорну поверхню на основі даних, отриманих при спосіб оптичного контролю за цим винаходом, обертанні контейнера. описаний у патенті США № 3313409, що вже був згаданий раніше в розділі опису рівня техніки. В 7 87130 8 установці, описаної в даному патенті, використасигнали про кутовий зсув контейнера можуть виний стрічковий конвеєр для подачі контейнерів роблятися на основі фіксованих кутових інтервалів уздовж напрямної. На основній стадії контейнери повороту контейнера або на основі фіксованих попадають на головку позиціювання, що є кільцеінтервалів часу, протягом яких швидкість обертанвою й має множину розташованих по колу кишень ня контейнера постійна. У пункт контролю 20 мождля розміщення контейнерів. Головка позиціюванна ввести також додаткові елементи, такі як датчиня виносить кожен контейнер у положення поблизу ки визначення наявності контейнера, інші пункту контролю, на якому здійснюється перевірка елементи контрольного устаткування й т.п. контейнера на наявність різних комерційних відхиАпаратура оптичного контролю 32 - безконтаклень та/або інших параметрів. Після перевірки тна, переважно призначена для контролю опорної контейнерів на кожному пункті контролю контейповерхні контейнера на «нахил» контейнера, але нери попадають на пункт вивантаження, з якого може також аналізувати й інші параметри, такі як вони виштовхуються на конвеєр, що видаляє їх з глибина рифлення, загин горлечка, сідловидність установки. Звичайно, це тільки два приклади устаабо деформування опорної поверхні й деякі інші. новок, у яких можуть бути використані пристрій і «Нахил» контейнера заміряють головним чином спосіб оптичного контролю по дійсному винаході, шляхом вимірювання відхилення опорної поверхні тоді як існує багато подібних установок. від площини, перпендикулярної осі контейнера; На Фіг.1 показана схема пункту контролю 20, у якщо це відхилення перевищує заздалегідь певну якому є ролик привода 24, пара вільно обертових величину, то можна вважати, що контейнер має додаткових верхніх і нижніх роликів 26, 28, блок нахил. Апаратура контролю 32 містить два світлокерування обертанням контейнера 30 і пристрій чутливих датчики 46 й 48 (Фіг.3), кожний має джеоптичного контролю 32 по кращому варіанті здійсрело світла 50, систему лінз 52 і світлочутливий нення винаходу. Підлягаючий контролю контейнер датчик 54, а також процесор обробки даних 56 і 34 установлюють за допомогою ролика привода 24 дисплей оператора 58. Світлочутливий датчик 54 напроти додаткових роликів 26, 28, і за допомогою містить ряд світлочутливих елементів 102, у якості ролика привода 24 приводять в обертання щодо яких можуть бути використані плоскі матриці із середньої осі обертання А. Положення осі А залезарядовим зв'язком або, що краще, лінійний набір жить від геометрії контейнера 34 і відстані між роелементів із зарядовим зв'язком. Можна викорисликами 26, 28. В ідеальному випадку вісь А колітати також світлочутливі елементи з діодами на неарна щодо центральної осі контейнера. бічному ефекті. Зрівняєте, наприклад, Фіг.9А, на якій середня вісь Краще, щоб апаратури контролю мала б два А збігається з віссю контейнера, а дно контейнера окремих датчики, що контролюють опорну поверхсильно нахилено, з Фіг.9В, на якій дно контейнера ню у двох різних точках, а також при найбільш широзташоване перпендикулярно до корпуса контейрокому трактуванні винаходу можна використати нера, але горлечко контейнера відхиляє середню один світлочутливий датчик, що дає промінь світвісь обертання А відносно осі корпуса контейнера. ла такої ширини, що достатня для контролю повеРолик 24 привода в кращому варіанті являє собою рхні у двох різних точках. Бажано, щоб ці дві точки пристрій із сервоприводом, що передає на контейбули б розташовані на протилежних сторонах діанер 34 радіальне зусилля й зусилля обертання. метра опорної поверхні, розділені на кут 180° один Під дією радіального зусилля контейнер затискавід іншого, як показано на Фіг.3. Для простоти на ється між роликом привода 24 і вільно обертовою Фіг.1 та 2 показаний тільки один світлочутливий парою додаткових роликів 2 6, 28, тоді як під дією датчик, однак те, що під час обговорення стосузусилля обертання контейнер 34 обертається нається одного датчика, застосовне й до іншого. Певколо осі А. Звичайно, замість цього ролика приредбачається також при найбільш широкому траквода можуть бути використані інші пристрої обертуванні даного винаходу, що може бути тання пляшок. Обидві пари верхніх і нижніх використаний один датчик 46 або 48, вихідний додаткових роликів 26, 28 містять по два додаткосигнал якого зрівняний із сигналом, що виникає вих ролика на кожну пару, які разом утворять Vпри повороті контейнера на 180°. подібну зборку, що забезпечує обертання контейНа Фіг.2А, 2В і 3 більш детально показані нера й запобігає його виштовхування з рухливої окремі елементи апаратури оптичного контролю підстави роликом привода 24. 32. Джерело світла 50 дає промінь світла 60, тобто Пристрій за кращим варіантом здійснення дапромінь світла у вигляді лінії нагору під гострим ного винаходу включає, але не обов'язково, рухкутом, цей промінь падає на опорну поверхню 62 ливу основу 22, на якій розташовується дно конконтейнера й відбивається від неї. Як джерело тейнера при його обертанні. Рухлива основа 22 світла 50 краще використати зосереджене джередає не тільки площину відліку (Фіг.8) для вимірюло, що містить лазерний діод 64, що генерує провання нахилу контейнера, але також утримує дно мінь світла, набір лінз 66, що фокусують промінь, і контейнера в точці фокусування вимірювальної генератор лінії 68, що перетворить промінь у лінію. оптики або близькому до цього положенні. РухлиУ розглянутому кращому варіанті втілення винавої основи може й не бути, або контейнер може й ходу лінія 60 падаючого променя є вузьким проне стикатися з рухливою основою, при цьому применем світла, що має ширину W при перетинанні стрій буде відповідати сутності даного винаходу. опорної поверхні, рівну приблизно 1,9 см (0,75 Блок керування 30 обертанням контейнера дюйма), як показано на Фіг.3. Світло падає під купідключений до ролика 24 привода й подає на том 45° до осі А і, отже, утворює кут 90° стосовно процесор обробки даних 56 електричні сигнали, які відбитого променя 80. характеризують кутовий зсув контейнера 34. Ці 9 87130 10 Система лінз 52 (Фіг.2А і 2В) розташована між коли пристрій контролює також й інші параметри опорною поверхнею 62 і світлочутливим датчиком виробу. Як світлочутливий датчик 54 можуть бути 54 так, що вона одержує відбитий світловий провикористані камери різних типів, але кращі високомінь 80, фокусує цей промінь і направляє сфокучутливі лінійні скануючі камери серії Далса Оріон сований промінь 82 у напрямку до світлочутливого (Dalsa Orion). Процесор обробки даних 56 зчитує датчика. Система лінз 52 у кращому варіанті являє ряд лінійних світлочутливих елементів через засобою анаморфотну систему лінз і складається із здалегідь певні або просторові, або часові інтерциліндричних лінз 90, розташованих поруч із лінвали, у результаті чого створюється картина світзою Френеля або сферичною лінзою 92. Вибір лінз ла, відбитого від опорної поверхні 62. Френеля або сферичних лінз 92 здійснюється, у Процесор обробки даних 56 підключається до тому числі й за фокусною відстанню, що визначає різних елементів пункту контролю 20 і загального розташування світлочутливого датчика 54 стосовпристрою контролю й здатний аналізувати опорні но системи лінз. Система лінз улаштована так, поверхні на основі інформації, одержуваної від щоб направляти певні компоненти світла, відбитосвітлочутливого датчика 54 кожного датчика 46, го від опорної поверхні, у напрямку до світлочут48. У кращому варіанті процесор обробки даних ливого елемента, при цьому направляючи інші має один або більше входів та/або виходів для компоненти відбитого світла убік від світлочутлиз'єднання із блоком 30 обертання контейнера, вого елемента. Тому відбите світло падаючого джерелом світла 50 і світлочутливим датчиком 54 променя 60, що спрямований паралельно первинобох датчиків 46, 48, а також дисплеєм оператора ної оптичної осі 82 (Фіг.2А і 2В) відбитого променя 58. Процесор обробки даних у кращому варіанті 80 (Фіг.3), навіть якщо відбитий промінь світла також має перший і другий електронний процесор трохи зміщений щодо оптичної осі (Фіг.2В), буде 96, 98 і блок керування камерою, при цьому напопадати на світлочутливий датчик 54. Як показазвані тільки деякі можливі елементи, з яких може но на Фіг.2А, відбитий промінь світла 80 по осі 82 складатися процесор обробки даних. Перший проспрямований на світлочутливий датчик 54, як і цесор 96, що називають також попереднім процевідбитий промінь 112, зміщений паралельно просором, стискає дані, одержувані зі світлочутливого меню по осі 82. Однак, промінь 122, що спрямовадатчика (світлочутливих датчиків) 54, скануючи ці ний під кутом до осі 80 через нахил поверхні 120, дані за період часу обертання контейнера, що бівідбивається на датчик 54 у ту ж точку, у яку попальше періоду часу, протягом якого процесор скадає промінь 112. Як видно з Фіг.2, відбиті промені нує відбите світло. Ця техніка зчитування або сти81, паралельні осі 82, спрямовані на ряд світлочуску даних буде розглянута нижче докладніше. тливих елементів 102, тоді як промені по напрямДругий або первинний процесор 98 одержує стислі ках 83, 85, непаралельним осі 82, спрямовані убік дані із попереднього процесора 96 і виконує алговід ряду світлочутливих елементів 102. Ця особритми й інші команди, використані апаратурою ливість підсилює нечутливість вимірів відносно оптичного контролю. Як очевидно для фахівців, бічних рухів контейнера в ході зчитування. Ці й схожі електронні пристрої й комбінація електроінші особливості оптики поліпшують можливості нних пристроїв можуть бути використані при описі практичного застосування апаратури оптичного процесора обробки даних 56, зазначеного вище. контролю 32, оскільки забезпечують малі похибки При роботі установки кожний із двох датчиків вимірів при бічному зсуві контейнера, що виключає 46, 48 випромінює по лінії 60 світло, що падає в відбраковування придатних до використання конрізних точках на опорну поверхню 62, і кожен світтейнерів. Звичайно, система лінз 52 може мати лочутливий елемент записує положення відбитого додаткові особливості та/або елементи, такі як променя світла 82, що падає на відповідний світневідбиваючі покриття, ахроматичні властивості й лочутливий датчик 54. Порівняння цих двох покат.п. зів дає можливість апаратурам контролю визначиСвітлочутливий датчик 54 розташований під ти має чи ні контейнер «нахил», а також визначити опорною поверхнею 62 і поблизу точки фокусуінші параметри контейнера. Для спрощення буде вання лінз 92, за рахунок чого він одержує світло описана робота одного із двох світлочутливих від лінз і видає електричні сигнали про положення елементів, тому що обидва світлочутливих елемеопорної поверхні на процесор обробки даних 56. нта працюють однаково. Падаюче світло 60 і відСвітлочутливий датчик 54 у кращому варіанті явбите світло 80, показані на фігурі, спрямовані узляє собою камеру з набору лінійних світлочутлидовж так називаної «номінальної оптичної осі», що вих елементів 102. Набір лінійних світлочутливих є віссю падаючих і відбитого променів при ідеальелементів містить ряд чутливих елементів із заряних умовах, коли опорна поверхня контейнера довим зв'язком або пікселей, розташованих у ліперпендикулярна осі обертання А. Номінальні осі нію, кожний з яких записує в цифровому виді інтепадаючих і відбитого променів спрямовані під кунсивність світла, що падає на цей піксель. У том 45° до осі, паралельній осі А. Номінальна опкращому варіанті втілення винаходу світлочутлитична вісь лежить у площині, паралельній осі А. вий елемент 102 складається з 512 лінійно розтаОтже, світлочутливий датчик 54 виробляє потік шованих пікселей. В альтернативному варіанті даних, які характеризують різний ступінь відбиття світлочутливий датчик 54 може складатися із плопроменя від обертової опорної поверхні. Цей потік скої множини світлочутливих елементів, що має даних подається на процесор обробки даних 56 у один або множину рядків і стовпців, що дозволяє вигляді вихідних сигналів світлочутливого елеменсформувати в процесорі обробки даних двовимірта, які можуть бути подані безпосередньо на перне зображення відбитого світла, як альтернатива винний процесор 98 для обробки або можуть бути одномірному зображенню. Це особливо корисно, подані на попередній процесор 96 для стиску. Пе 11 87130 12 рвинний процесор використовує інформацію, що віть якщо на фігурі показано п'ятнадцять опуклосміститься у вихідних сигналах світлочутливого тей. Відстань 140 (Фіг.4D) показує різницю висот елемента, для аналізу різних параметрів опорної між найбільш верхніми й найбільш нижчими точповерхні, включаючи нахил контейнера й глибину ками опуклостей конкретної опорної поверхні. Різопуклості. Якщо виявляється, що контейнер має ниця між висотами цих двох точок є мірою нахилу неприйнятні комерційні відхилення, тоді цей конконтейнера відносно середньої осі обертання, що тейнер позначається як відхилений і видаляється з при діленні на діаметр опорної поверхні й множенконвеєра на пункт вивантаження. ні на висоту контейнера може бути використана Як показано на Фіг.4A-4D, пристрій оптичного для визначення нахилу контейнера відповідно до контролю 32 застосовується для контролю опорної методики, відомої як мінімаксний метод. Відстань поверхні 130 певного виду, так називаної наката152 (Фіг.4D) відповідає відстані між виступом і заної поверхні, що має ряд опуклостей з виступами падиною конкретної опуклості, або глибині опукло134 і западинами 136. Звичайно опуклість формусті. Глибину опуклості можна визначити за один ють на опорній поверхні по колу дна контейнера. вимір або можна взяти як середнє ряду вимірів і При обертанні контейнера промінь відбивається й т.п. Образ 164 подвійного відбиття не використопопадає на світлочутливий датчик 54 тільки від вується при реалізації даного винаходу. трьох частин опуклості, тоді як інші відбиті промені На Фіг.5 схематично показаний екран дисплея проходять повз світлочутливий елемент. Ці три 58 (Фіг.1), що відповідає способу оптичного контточки показані на Фіг.4А-4С. Як показано на Фіг.4А, ролю по Фіг. 4A-4D. Більш точно, кожна оцінка на падаючий промінь 140, що випромінюється джеграфіку відповідає випадку, коли падаючий прорелом світла, відбивається від виступу 134 таким мінь відбивається опорною поверхнею й падає на чином, що відбитий промінь 142 направляється на світлочутливий датчик 54. На Фіг.6 та 7 показаний світлочутливий елемент. Оскільки падаючий проспосіб порівняння даних, отриманих світлочутлимінь 140 відбивається від самої верхньої точки вим датчиком 54 і показаних на Фіг.5, при якому виступу 134, промінь світла поширюється так, намінімізовані обсяг пам'яті й алгоритм обробки дачебто він відбивається від плоскої поверхні, перних. Таблиця на Фіг.6 розділена на стовпці й ряди, пендикулярної осі А. Як показано на Фіг.4В, оберна їхньому перетинанні зазначений конкретний тання контейнера спричинює те, що падаючий піксель. Чисельне значення, співставлене кожному промінь 140 тепер падає на западину 136 торовапікселю, відповідає інтенсивності світла цього пікної поверхні 130. Як і на попередній фігурі, відбиселя в конкретній точці. Наприклад, при скануванні тий промінь 144 поводиться так, ніби він відбивав1 піксель 1 лінійки світлочутливих датчиків 102 ся від плоскої поверхні, перпендикулярної осі А. зареєстрував «7», піксель 2 - «11», піксель 3 Однак, відбитий промінь 144 відступає від відбито«23» і т.п. Були проскановані й занесені в перший го променя 142 (показаного на фігурі пунктирною стовпчик таблиці дані від 27 окремих пікселей лілінією) на відстань В, тому відбитий промінь 144 нійки світлочутливих елементів. Контейнер безудосягає датчика світла в точці, що відступає від пинно обертався від ролика привода 24, так що точки падіння відбитого променя 142. На Фіг.4С при наступному скануванні датчик запише «6» для показана ситуація, при якій У результаті подальпікселя 1, «9» для лікселя 2, «0» для пікселя 3 і шого повороту контейнера падаючий промінь 140 т.д. Це друге зчитування датчика світла становить попадає на торовану поверхню 130 і зазнає повміст другого стовпчика таблиці. Наступні зчитудвійного відбиття від похилих поверхонь сусідніх вання світлочутливим датчиком 54 розділені інопуклостей. У цьому випадку падаючий промінь тервалом 176, причому цей інтервал може бути 140 спочатку відбивається під тупим кутом від заданий або заздалегідь установленим середнім ухилу вниз першої опуклості й попадає на висхідчасом зчитування, або заздалегідь установленим ний ухил сусідньої другої опуклості, відбиваючись кутовим переміщенням контейнера. Кожен рядок від її вдруге під тупим кутом. Після відбиття від відображає інтенсивність світла одного пікселя в цих двох похилих поверхонь, зазнаючи так назиряді світлочутливих елементів 102 у ході серії із ване подвійне відбиття промінь 146, що падає, семи сканувань. При збільшенні інтервалу до 178 попадає на світлочутливий елемент на відстані С попередній процесор 106 вибирає більш високу від променя 142. Знову через розходження шляхів інтенсивність світла для кожного пікселя, відбувавідбитих променів, відбитий промінь 146 попадає ється процес «попереднього зчитування». Дані, на світлочутливий елемент в іншій точці стосовно зібрані в останній колонці й позначені як «дані для променя 142. Якщо падаючий промінь попадає на передачі», призначені тільки для передачі на перопуклість у будь-якій іншій точці, відмінної від цих винний процесор 108. Отже, світлочутливий даттрьох точок, то він відбивається від поверхні опукчик 54 виконує послідовне зчитування відбитого лості 130 у тім напрямку, що минає світлочутливий променя на першому інтервалі 176, тоді як попеелемент. Отже, відбитий промінь, що попадає на редній процесор виконує послідовне зчитування світлочутливий елемент 54 при обертанні контейвихідного сигналу датчика на другому інтервалі нера, переривається, фіксуючи три дискретних 178, що більше, ніж перший інтервал. Установка точки опуклості. На Фіг.4D наведений графік, що оптичного контролю по даному винаході дає можпоказує вихідний сигнал одного з датчиків 54. Точливість визначити нахил контейнера з використанки 160 це відбиття від піків опуклості (Фіг.4А), точки ням тільки частини даних, які необхідні в інших 162 це відбиття від западин опуклості (Фіг.4В) і випадках, і, оскільки на обробку направляється точки 164 подвійні відбиття від обох сторін опукловеликий потік даних, то точність контролю помітно сті (Фіг.4С). Звичайні скляні контейнери мають на не зменшується. Вибираючи як альтернативу макопорній поверхні до двох сотень опуклостей, насимальне значення величини для кожного пікселя 13 87130 14 на інтервалі зчитування 178, попередній процесор числення величини «а», так що вираз, наведений може підрахувати середню інтенсивність сигналу вище, є найкращою моделлю інтерпретації обмідля кожного пікселя й т.д. Вибір семи сканувань рюваних даних, одержуваних зі світлочутливого для стискування даних не є обов'язковим. елемента 54. Лінеаризація рівняння (1) полегшує На Фіг.7 показаний графік, що відтворює дані застосування методу найменшої квадратичної попереднього зчитування, які направляють на попохибки стосовно даних вимірів. Область визнапередній процесор 106 відповідно до даного виначення величини «а» подається виразом: ходу. Графік, показаний на Фіг.7, це стислий варіу (І) =ао + а* sin (2 pΙ/Ν + Θο) = aο + a* cos Θ про ант графіка, показаного на Фіг.5. Більш конкретно, * sin (2 p Ι/Ν) + a* sin Θпро * cos (2 p Ι/Ν) = аο + а1* відмітки, розкидані в інтервалі 160-164 на Фіг.5, sin (2 p Ι/Ν) + а2 * cos (2 p Ι/Ν) (рівняння 2) були прибрані, тоді як оцінки, що залишилися стислі й сконцентровані в інтервалі 180-184 Фіг.7. a = æ a 2 + a 2 ö (рівняння 3) ç I 2÷ è ø Оскільки більша частина вилучених даних є даниОскільки амплітуда синусоїди «а» відома, нами про плями, то втрати значимої інформації не хил контейнера може бути визначений за формувідбувається й, отже, точність вимірів не погіршулою: ється. На прикладі із зображенням в 504 лінії коНахил = а* висота контейнера/діаметр (рівжен контейнер сканують 504 рази в ході одного няння 4) повороту контейнера, або приблизно кожні 0,71 Якщо обчислене значення нахилу перевищує секунди. Якщо дані передаються після кожного 7заздалегідь певне значення, тоді контейнер вваго зчитування, то тільки 72 лінії попадають на пержається контейнером, «що має нахил», і цей конвинний процесор 108, замість 504 ліній. Отже, метейнер відбраковується. тою даного способу є стискування даних для анаДля застосування методу найменшої квадралізу, тоді як дані, що залишаються дають досить тичної похибки, згаданого вище, необхідно мати інформації для проведення точного контролю. Як деякі попередні відомості про синусоїду, зокрема згадано вище, інтервал між зчитуваннями або датпро період N синусоїди. Обчислення за методом чиком світла, або попереднім процесором може найменшої квадратичної похибки й аналіз синусоївизначатися або заздалегідь установленим кутоди, описаної вище, вимагає додаткового часу, вим зсувом контейнера, таким як 0,71 секунди, або особливо в тому випадку, коли виконується тривазаздалегідь певним часовим інтервалом. Даний лий пошук періоду синусоїди N. Для мінімізації спосіб дає багато переваг пристрою оптичного часу комп'ютерної обробки, може бути використаконтролю 32, включаючи, але не обмежуючись на додаткова методика, називана методом пошуку цим ризький ступінь помилкового визначення міри золотого перетину. Пошук золотого перетину це нахилу, високий ступінь виявлення дефектів, малінійний метод швидкого й точного визначення лий час фіксування крайових ефектів і низькі виперіоду синусоїди Ν, і тільки цей метод годиться моги до запам'ятовувального пристрою. для контролю контейнерів. Оскільки період синусоНа Фіг.8 показаний інший спосіб застосування їди N відомий, то стає відомим параметр у рівнянні пристрою оптичного контролю 32 для аналізу опо1. Для будь-якого контейнера первісна оцінка перної поверхні. У цьому способі застосовується ріоду синусоїди може бути виконана на основі читехніка, яку ми називаємо методом найменшої сла обертів на період калібрування й числа скануквадратичної похибки. Метою даного способу є ючих ліній у зображенні (наприклад, 72 скануючі одержання математичного виразу опорної поверхлінії у вищезгаданому прикладі). Оскільки первісні ні 62, що збігається з даними вимірів, узятими в оцінки виконані, то на закритому інтервалі здійсплощині 22а (яка може бути поверхнею гладкої нюється пошук лінії, що має золотий перетин 168. основи 22), і визначення із цього виразу того факМетою цього пошуку є застосування методу багату, що контейнер має нахил. Використовуваний тут торазових ітерацій для визначення періоду синусоматематичний вираз являє собою залежність різїди N, у результаті чого величина похибки виміру ниці висот двох точок опорної поверхні від кутовозводиться до мінімуму. го положення Контейнера. Ці дві точки відповідаНаприклад, ітеративний пошук першої лінії явють положенню двох датчиків 46 й 48, на які ляє собою пошук першого інтервалу можливих падають промені світла з опорної поверхні. Конзначень величини N, що включають точки золотого тейнер 200 має опорну поверхню 62 і дві точки перетину Ν1 й N2. Цей перший інтервал значень 204, 206, які розташовані на опорній поверхні під починається з «стартового» значення, проходить кутом 180°. Висоти або зсуви по осі точок 204 й уздовж лінії через точки золотого перетину Ν2 й 206 щодо площини 22а позначені як h2 й h1 відпоΝ1, саме в такому порядку, і закінчується на «кінвідно. Оскільки контейнер обертається навколо осі цевій» величині. Похибка при Ν1, позначена як А, відстані h2 й h1 змінюються залежно від кутового Q(N1), порівнянна з похибкою при N2, позначеною положення контейнера. Відстань між висотами h2 й як Q(N2). Якщо Q(N1)³Q(N2), то оптимальне знаh1 може бути математично подана у вигляді: чення величини N лежить на лінії між стартовою у(І) = h2(I) – h1(I) =ao + a* sin (2p Ι/Ν + Θο) (рівточкою й точкою золотого перетину Ν1; якщо няння 1) Q(N1)³Q(N2), то оптимальне значення величини N де: а0 - середній осьовий зсув опорної поверхлежить на лінії між точкою золотого перетину N2 і ні від площини, а - амплітуда синусоїди, зміна якої кінцевою точкою. Таким чином, інтервал пошуку повинна бути визначена, N - період синусоїди, Θ другої лінії лежить або в проміжку старт-Ν1, або початкова фаза ринусоїди. N2-кінцева точка, причому обидва ці проміжки меОтже, метою даного способу є використання нші ніж перший інтервал. При ітеративному пошуку методу найменшої квадратичної похибки для об 15 87130 16 другої лінії необхідно вибрати нові точки золотого обрані тільки ті точки, які попадають усередину перетину, оскільки значення Ν1 й N2 не лежать певного інтервалу, скажемо 15% різниці значень більше в середині інтервалу пошуку. У прикладі, висот між точками А і В. Обчислення за методом де інтервал ітераційного другого пошуку лежить найменшої квадратичної похибки можуть далі вивід старту до Ν1, а нові точки золотого перетину N3 конуватися тільки для цих точок. Якщо це не дой N4 обрані так, що лежать усередині цього інтерзволить одержати достатню кількість точок для валу, а точка Ν4 збігається із точкою Ν2. Знову для точних вимірів, то просто можна збільшити відсокожної з нових точок золотого перетину обчислюток від рівня, що дасть необхідну кількість точок. ють похибки Q(N3) і Q(N4), але оскільки точка N4 Отже, описані пристрій і спосіб оптичного конзбігається із точкою N2, то потрібно обчислити тролю опорної поверхні контейнера, які повністю відповідають сформульованим вище цілям і притільки Q(N3). Якщо Q(N3) ³ Q(N2), то оптимальне значенням. Описано різні альтернативні варіанти й значення величини N лежить на лінії між точками модифікації. Інші варіанти й модифікації можуть золотого перетину N3 й Ν1; якщо Q(N3)
ДивитисяДодаткова інформація
Назва патенту англійськоюOptical device and method to check inclination of container
Автори англійськоюJuvinol John U., Ringlien James A., Graf Stephen M., Chen Tsi, Anderson William H.
Назва патенту російськоюОптическое устройство и способ проверки наклона контейнера
Автори російськоюДжувинол Джон У., Ринглайен Джеймс А., Граф Стивен М., Чен Цзи, Андерсон Уильям Х.
МПК / Мітки
МПК: G01N 21/90
Мітки: контейнера, оптичний, спосіб, нахилу, перевірки, пристрій
Код посилання
<a href="https://ua.patents.su/10-87130-optichnijj-pristrijj-ta-sposib-perevirki-nakhilu-kontejjnera.html" target="_blank" rel="follow" title="База патентів України">Оптичний пристрій та спосіб перевірки нахилу контейнера</a>
Спосіб ліофілізації та герметизації продукту, який упорскується, вузол контейнера, пристрій контейнера та голчастого шприца
Номер патенту: 27970
Опубліковано: 16.10.2000
Автор: Гарріс Дейл
МПК: A61B 19/00, A61M 5/00, A61M 37/00
Мітки: герметизації, продукту, контейнера, голчастого, пристрій, ліофілізації, спосіб, упорскується, шприца, вузол
Текст:
...литьем под давлением, хотя можно применять другие соответствующие материалы с колпачком, изготовленным соответственно Колпачок 20 имеет цилиндрическую нижнюю часть, или юбку, 22 с данной осевой длиной и внутренним радиусом, достаточным, чтобы располагаться вокруг по меньшей мере части цилиндрического контейнера для лиофилизации. Как будет дальше описано, нижняя часть, или юбка, 22 стабилизиру ет коппачок 20, когда он находится на...
Контейнер, спосіб і пристрій виготовлення контейнера, а також спосіб і пристрій наповнення контейнера
Номер патенту: 57131
Опубліковано: 16.06.2003
Автори: Шехольм Йохан, Моссберг Ульф
МПК: B65B 1/04, B65D 33/36, B65B 3/04, B65D 30/10, B31B 1/74
Мітки: також, контейнера, виготовлення, спосіб, наповнення, контейнер, пристрій
Формула / Реферат:
1. Контейнер для рідкого або порошкоподібного вмісту, що містить стінки, які сполучені між собою таким чином, що утворюють закриту камеру, причому дві протилежні бічні стінки сполучені вздовж загальної з'єднувальної ділянки, причому контейнер має канальний засіб, який утворений між двома бічними стінками і проходить від камери до зовнішньої сторони контейнера, який відрізняється тим, що стінки є гнучкими, так що об'єм камери залежить від...
Пристрій для перевірки друкованих матеріалів, друкувальний апарат та спосіб перевірки зображень на аркуші
Номер патенту: 32538
Опубліковано: 15.02.2001
Автори: Айзенбарт Крістоф, Панофські Едвард, Фінкельштайн Іра, Джанг Харрі, Макгі Денніс
МПК: G07D 7/00
Мітки: зображень, аркуші, матеріалів, друкувальний, друкованих, пристрій, апарат, спосіб, перевірки
Текст:
...в устройство, являющееся предметом изобретения, где они сканируются и в случае необходимости отбраковываются в блоке отбраковки. В предпочтительном варианте блок отбраковки предназначен для приема из микропроцессора специальных данных, которые указывают, какой из документов на листе должен быть отбракован. Указанный документ отбраковывается, например, путем печатания на нем определенного слова или сообщения. Изобретение поясняется чертежами,...
Вантажозахватний пристрій для кришок контейнера ктз – 3,0
Номер патенту: 14286
Опубліковано: 15.05.2006
Автори: Морфіянець Олена Іванівна, Плотко Олександр Леонідович, Кондратенко Віктор Васильович
МПК: B66C 1/62
Мітки: кришок, ктз, контейнера, вантажозахватний, пристрій
Формула / Реферат:
1. Вантажозахватний пристрій для кришок контейнера КТЗ-3,0, що містить каркас з підвіскою для кріплення до крюка крана, механізм фіксації для автоматичного регулювання захватів, кронштейни, що зв'язані з захватами, захватні важелі, який відрізняється тим, що містить уловлювачі, які являють собою чотири напрямні, приєднані до несучої конструкції.2. Вантажозахватний пристрій для кришок контейнера КТЗ-3,0 за п.1, який відрізняється тим,...
Клапанний вузол контейнера для напою, контейнер для напою і спосіб заповнення і випорожнення контейнера
Номер патенту: 71919
Опубліковано: 17.01.2005
Автори: Тімп Піт Хейн Віллем, ван Бал Патрік Міхаель
Мітки: заповнення, спосіб, контейнер, контейнера, вузол, клапанний, випорожнення, напою
Формула / Реферат:
1. Клапанний вузол контейнера для напою, зокрема газованого напою, такого як пиво, що містить корпус, канал для напою з клапанним елементом, функціональні засоби для переміщення клапанного елемента, причому згадані функціональні засоби містять перші з’єднувальні засоби для з’єднання каналу для напою із засобами розливу напою для випорожнення контейнера через клапанний елемент або вздовж нього та другі з’єднувальні засоби для з’єднання каналу...
Попередній патент: Пристрій для вимірювання температури у розплавах металів та спосіб його виготовлення
Наступний патент: Скрубер
Випадковий патент: Спосіб зібрання вузла передачі крутильного моменту від валу