Спосіб ідентифікації параметрів електрогідравлічного комплексу
Номер патенту: 87460
Опубліковано: 10.02.2014
Автори: Зінченко Марина Григорівна, Коренькова Тетяна Валеріївна, Ковальчук Вікторія Григорівна, Родькін Дмитро Йосипович

Формула / Реферат
Спосіб ідентифікації параметрів електрогідравлічного комплексу, що включає визначення параметрів електрогідравлічного комплексу під час його експлуатації, який відрізняється тим, що на вхід системи керування перетворювачем частоти задають тестовий гармонічний вплив![]() , який включає постійну U0 і змінну Uvar складові, де Ω=2πf - кутова частота; f - частота зміни вхідного сигналу; φ - кут зсуву сигналу задання відносно початку координат; за допомогою датчика швидкості проводять дискретний вимір поточної частоти обертання n(t) привідного двигуна насоса, визначають відносну частоту обертання v(t)=n(t)/nn насосного агрегату, де nn - номінальне значення частоти обертання електродвигуна насоса; обчислюють сигнал продуктивності Q(t)=Qnv(t) на виході насосного агрегату, де Qn - номінальне значення продуктивності насосного агрегату; залежно від вибраної схеми заміщення електрогідравлічного комплексу, визначають кількість невідомих параметрів; обчислюють сигнали миттєвої потужності на кожному елементі схеми заміщення електрогідравлічного комплексу: на виході гідравлічного джерела (насоса) pin(t)=H0v2(t)Q(t), де Но - напір, що створюють насосом при нульовій продуктивності; гідравлічної потужності pst(t)=HstQ(t) в трубопровідній мережі, що витрачають на подолання протитиску Hst; гідравлічної потужності pRp(t)=RpQ3 (t) на активному опорі насоса Rp=aQ(t), де a - коефіцієнт апроксимації, який враховує сили в'язкого тертя між шарами рідини, рідиною і стінками гідравлічного тракту насоса; гідравлічної потужності pRnet (t)=RnetQ3(t) на активному опорі трубопроводу Rnet=d/Q(t), де δ – коефіцієнт апроксимації, який враховує довжину ділянки проточної частини трубопроводу, його діаметр, кінематичну в'язкість і густину; гідравлічної потужності pRcon (t)=Rcon Q3(t) на активному опорі споживача Rcon;
, який включає постійну U0 і змінну Uvar складові, де Ω=2πf - кутова частота; f - частота зміни вхідного сигналу; φ - кут зсуву сигналу задання відносно початку координат; за допомогою датчика швидкості проводять дискретний вимір поточної частоти обертання n(t) привідного двигуна насоса, визначають відносну частоту обертання v(t)=n(t)/nn насосного агрегату, де nn - номінальне значення частоти обертання електродвигуна насоса; обчислюють сигнал продуктивності Q(t)=Qnv(t) на виході насосного агрегату, де Qn - номінальне значення продуктивності насосного агрегату; залежно від вибраної схеми заміщення електрогідравлічного комплексу, визначають кількість невідомих параметрів; обчислюють сигнали миттєвої потужності на кожному елементі схеми заміщення електрогідравлічного комплексу: на виході гідравлічного джерела (насоса) pin(t)=H0v2(t)Q(t), де Но - напір, що створюють насосом при нульовій продуктивності; гідравлічної потужності pst(t)=HstQ(t) в трубопровідній мережі, що витрачають на подолання протитиску Hst; гідравлічної потужності pRp(t)=RpQ3 (t) на активному опорі насоса Rp=aQ(t), де a - коефіцієнт апроксимації, який враховує сили в'язкого тертя між шарами рідини, рідиною і стінками гідравлічного тракту насоса; гідравлічної потужності pRnet (t)=RnetQ3(t) на активному опорі трубопроводу Rnet=d/Q(t), де δ – коефіцієнт апроксимації, який враховує довжину ділянки проточної частини трубопроводу, його діаметр, кінематичну в'язкість і густину; гідравлічної потужності pRcon (t)=Rcon Q3(t) на активному опорі споживача Rcon;
гідравлічної потужності ![]() на реактивному опорі трубопроводу
на реактивному опорі трубопроводу ![]() , де γ - коефіцієнт апроксимації, який враховує властивості рідини і геометричні параметри трубопроводу; отримані сигнали потужності представляються тригонометричними рядами із використанням перетворень Фур'є, визначаються постійні (Pin 0, Pst 0, PRp 0, PRnet 0, PLnet 0, PRcon 0) і змінні косинусні (Pin ak, Pst ak, PRp ak, PRnet ak, PLnet ak, PRcon ak) й синусні (Pin bk, Pst bk, PRp bk, PRnet bk, PLnet bk, PRcon bk) гармонічні складові сигналів миттєвої гідравлічної потужності на виході джерела гідравлічного живлення та всіх елементів еквівалентної схеми заміщення електрогідравлічного комплексу, де k - номер відповідної гармоніки потужності; складають систему ідентифікаційних рівнянь на базі рівнянь енергобалансу постійної й гармонічних складових миттєвої потужності на виході гідравлічного джерела і всіх елементів схеми заміщення, при цьому вибирається необхідна кількість значущих гармонік потужності, що відповідає кількості невідомих параметрів схеми заміщення; розв'язується система ідентифікаційних рівнянь, визначаються невідомі гідравлічні Hst, α, δ, γ, Rcon та енергетичні параметри електрогідравлічного комплексу: активна потужність на виході гідравлічного джерела (насоса) Ріn 0 й на елементах схеми заміщення ЕГК PRp 0, PRnet 0, PLnet 0, Pst 0, відповідно; втрати потужності в насосі
, де γ - коефіцієнт апроксимації, який враховує властивості рідини і геометричні параметри трубопроводу; отримані сигнали потужності представляються тригонометричними рядами із використанням перетворень Фур'є, визначаються постійні (Pin 0, Pst 0, PRp 0, PRnet 0, PLnet 0, PRcon 0) і змінні косинусні (Pin ak, Pst ak, PRp ak, PRnet ak, PLnet ak, PRcon ak) й синусні (Pin bk, Pst bk, PRp bk, PRnet bk, PLnet bk, PRcon bk) гармонічні складові сигналів миттєвої гідравлічної потужності на виході джерела гідравлічного живлення та всіх елементів еквівалентної схеми заміщення електрогідравлічного комплексу, де k - номер відповідної гармоніки потужності; складають систему ідентифікаційних рівнянь на базі рівнянь енергобалансу постійної й гармонічних складових миттєвої потужності на виході гідравлічного джерела і всіх елементів схеми заміщення, при цьому вибирається необхідна кількість значущих гармонік потужності, що відповідає кількості невідомих параметрів схеми заміщення; розв'язується система ідентифікаційних рівнянь, визначаються невідомі гідравлічні Hst, α, δ, γ, Rcon та енергетичні параметри електрогідравлічного комплексу: активна потужність на виході гідравлічного джерела (насоса) Ріn 0 й на елементах схеми заміщення ЕГК PRp 0, PRnet 0, PLnet 0, Pst 0, відповідно; втрати потужності в насосі ![]() і в трубопроводі
і в трубопроводі ![]() сумарні втрати потужності в електрогідравлічному комплексі
сумарні втрати потужності в електрогідравлічному комплексі ![]() коефіцієнта корисної дії насосного агрегату
коефіцієнта корисної дії насосного агрегату ![]()
Текст
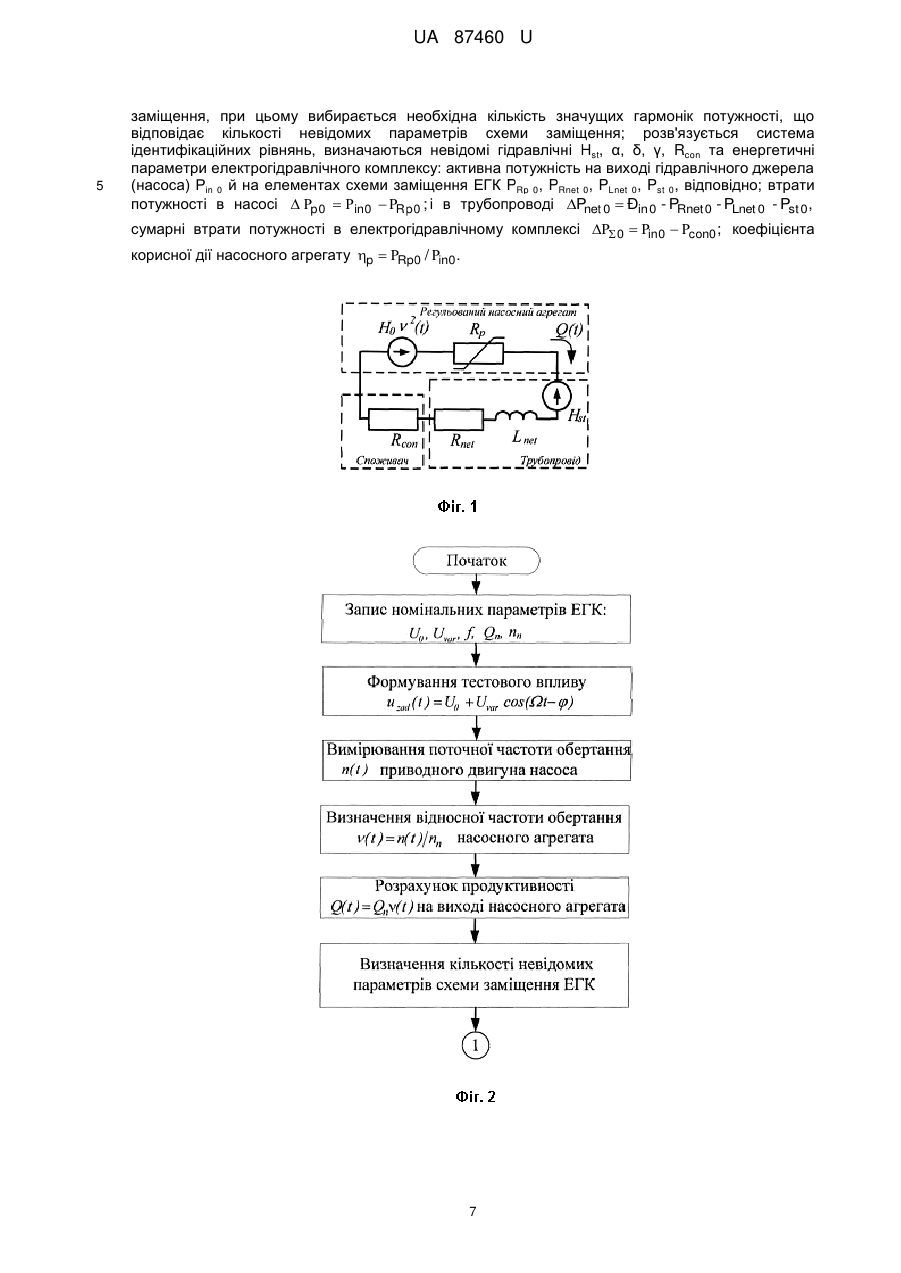
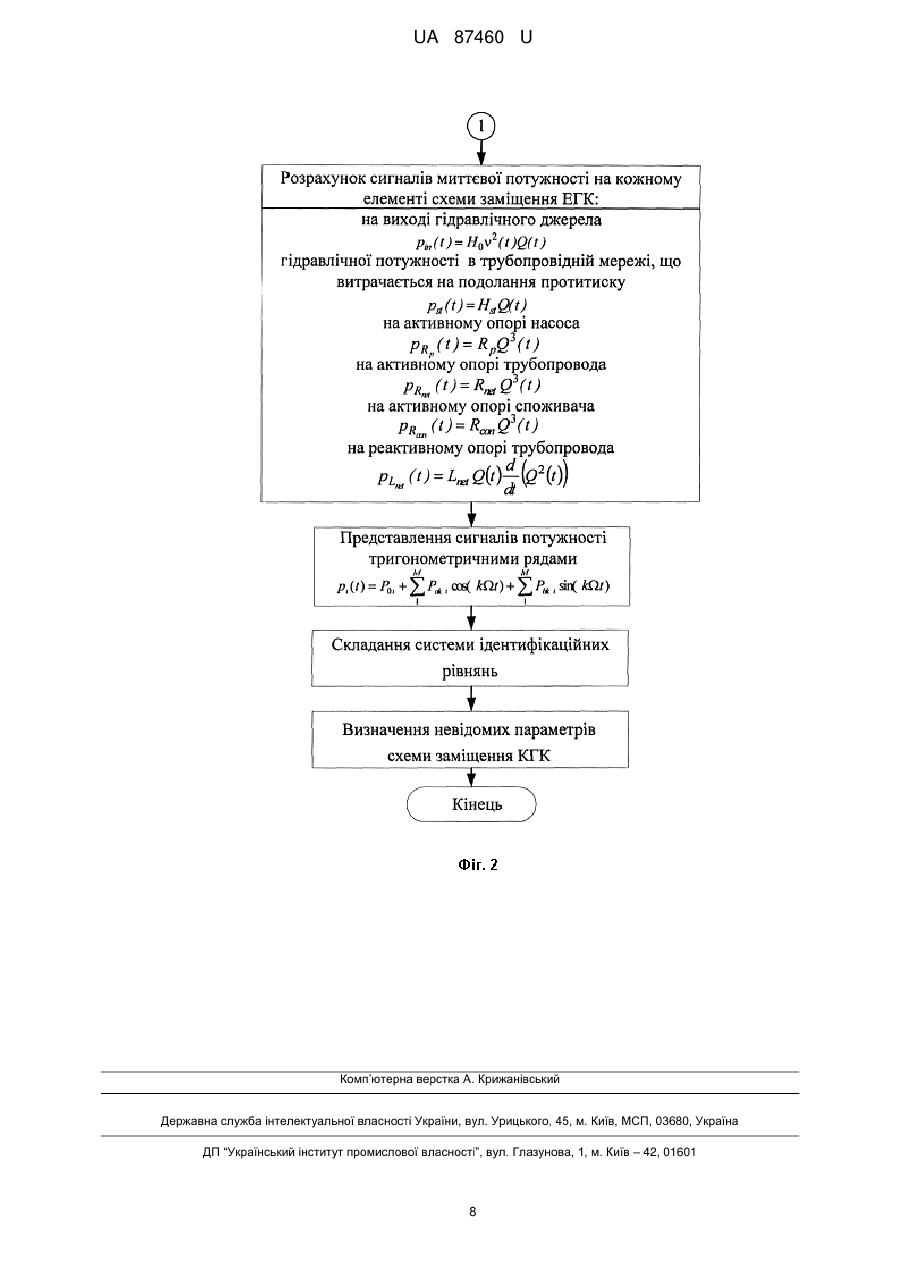
Реферат: Спосіб ідентифікації параметрів електрогідравлічного комплексу включає визначення параметрів електрогідравлічного комплексу під час його експлуатації. На вхід системи керування перетворювачем частоти задають тестовий гармонічний вплив uzad (t) U0 Uv ar cos(t ) , який включає постійну U0 і змінну Uvar складові, де Ω=2πf кутова частота; f - частота зміни вхідного сигналу; φ - кут зсуву сигналу задання відносно початку координат; за допомогою датчика швидкості проводиться дискретний вимір поточної частоти обертання n(t) привідного двигуна насоса, визначається відносна частота обертання v(t) = n(t)/nn насосного агрегату, де nn - номінальне значення частоти обертання електродвигуна насоса. Обчислюють сигнал продуктивності Q(t)=Qnv(t) на виході насосного агрегату, де Qn номінальне значення продуктивності насосного агрегату; залежно від вибраної схеми заміщення електрогідравлічного комплексу, визначають кількість невідомих параметрів. Обчислюють сигнали миттєвої потужності на кожному елементі схеми заміщення 2 електрогідравлічного комплексу: на виході гідравлічного джерела (насоса) pin(t)=H0v (t)Q(t), де Но - напір, що створюють насосом при нульовій продуктивності; гідравлічної потужності pst(t)=HstQ(t) в трубопровідній мережі, що витрачається на подолання протитиску Hst; 3 гідравлічної потужності pRp(t)=RpQ (t) на активному опорі насоса Rp=Q(t), де - коефіцієнт апроксимації, який враховує сили в'язкого тертя між шарами рідини, рідиною і стінками 3 гідравлічного тракту насоса. Гідравлічної потужності pRnet (t)=RnetQ (t) на активному опорі трубопроводу Rnet=/Q(t), де δ – коефіцієнт апроксимації, який враховує довжину ділянки проточної частини трубопроводу, його діаметр, кінематичну в'язкість і густину. Гідравлічної 3 потужності pRcon (t) = Rcon Q (t) на активному опорі споживача Rcon. d Гідравлічної потужності pL net t Lnet Qt Q 2 t на реактивному опорі трубопроводу dt Lnet v t , де γ - коефіцієнт апроксимації, який враховує властивості рідини і геометричні параметри трубопроводу; отримані сигнали потужності представляються тригонометричними рядами із використанням перетворень Фур'є, визначаються постійні (Pin 0, Pst 0, PRp 0, PRnet 0, PLnet 0, PRcon 0) і змінні косинусні (Pin ak, Pst ak, PRp ak, PRnet ak, PLnet ak, PRcon ak) й синусні (Pin bk, Pst bk, PRp bk, PRnet bk, PLnet bk, PRcon bk) гармонічні складові сигналів миттєвої гідравлічної потужності на виході джерела гідравлічного живлення та всіх елементів еквівалентної схеми заміщення UA 87460 U (54) СПОСІБ ІДЕНТИФІКАЦІЇ ПАРАМЕТРІВ ЕЛЕКТРОГІДРАВЛІЧНОГО КОМПЛЕКСУ UA 87460 U електрогідравлічного комплексу, де k - номер відповідної гармоніки потужності; складається система ідентифікаційних рівнянь на базі рівнянь енергобалансу постійної й гармонічних складових миттєвої потужності на виході гідравлічного джерела і всіх елементів схеми заміщення. Вибирається необхідна кількість значущих гармонік потужності, що відповідає кількості невідомих параметрів схеми заміщення; розв'язується система ідентифікаційних рівнянь, визначаються невідомі гідравлічні Hst, α, δ, γ, Rcon та енергетичні параметри електрогідравлічного комплексу: активна потужність на виході гідравлічного джерела (насоса) Ріn 0 й на елементах схеми заміщення ЕГК PRp 0, PRnet 0, PLnet 0, Pst 0, відповідно; втрати потужності в насосі p 0 in 0 R p 0 ; і в трубопроводі Pnet 0 Ðin 0 - PRnet 0 - PLnet 0 - Pst 0 , сумарні втрати потужності в електрогідравлічному комплексі насосного агрегату p Rp0 / in 0 . 0 in 0 con0 ; коефіцієнта корисної дії UA 87460 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки і може бути використана в системах контролю параметрів електрогідравлічних комплексів (ЕГК) комунального і промислового водо - і теплопостачання, водовідведення, нафто перекачувальних насосних станцій для визначення поточних технологічних і енергетичних параметрів діючих ЕГК при регулюванні продуктивності, тривалій експлуатації насосного і трубопровідного обладнання. Відомий спосіб визначення параметрів динамічного насоса при проведенні приймальноздавальних та післяремонтних випробовувань [ГОСТ 6134-87. Насосы динамические. Методы испытаний. - Москва, 1989 С. 4-8, 10-13], в ході якого визначаються технологічні (напір, витрата) та енергетичні (активна потужність, коефіцієнт корисної дії (ККД)) параметри турбомеханізму. Для цього насосний агрегат (НА) підключається до випробувального стенду і, залежно від типу випробувань (енергетичного, кавітаційного чи післяремонтного), створюються відповідні умови для його проведення і здійснюється зняття показників з необхідної контрольно-вимірювальної апаратури. Ознаки, що збігаються з істотними ознаками способу, який заявляється: визначення основних параметрів насоса (напору, витрати, активної потужності та ККД). До недоліків способу належать - необхідність наявності спеціального випробувального обладнання, яке характеризується визначенням параметрів насосного обладнання в обмеженому діапазоні потужності та витрати без урахування властивостей трубопровідної системи; - відсутність можливості визначення параметрів насосних агрегатів, що знаходяться в експлуатації, що зумовлено особливостями проведення випробувань лише в умовах заводувиробника. Відомий спосіб визначення ККД насосного агрегату [Пат. 2320007, Российская Федерация, МПК G06F19/00, Автоматизированная информационная система для непрерывного измерения и анализа в реальном масштабе времени коэффициента полезного действия насосов в насосно-трубопроводном комплексе магистрального трубопровода / Кричке В.О., Тихонов И.В., Волков Ю.В., Акбердин A.M., Вишневская Т.Н., Кричке В.В., Громан А.О. - Заявл. 10.11.2005, опубл. 20.10.2007, бюл. № 8.], який полягає в обчисленні по кожному насосу активної потужності, діючої на валу насоса, тиску, що створюється насосом, витратного коефіцієнта, об'ємної витрати рідини в реальному масштабі часу з наступним перерахунком базового та поточного значень ККД кожного насоса і порівнянні зазначених поточних значень з базовими. Ознаки, що збігаються з істотними ознаками способу, який заявляється: визначення параметрів ЕГК (тиску, активної потужності, продуктивності та ККД) в період його експлуатації. До недоліків способу належать: - необхідність наявності бази даних фактичних витратних характеристик насосного агрегату, що характеризується працемісткістю отримання такого роду характеристик для широкої номенклатури насосних агрегатів; - відсутність можливості визначення гідравлічних (гідравлічного опору, статичного напору) та енергетичних (втрат потужності в насосі і трубопровідній мережі) параметрів ЕГК, які є базовими для визначення енергоефективного режиму роботи насосного агрегату на трубопровідну мережу, та прийняття рішення про доцільність подальшого використання технологічного обладнання. Зазначений спосіб вибрано як прототип способу, що заявляється. В основу корисної моделі поставлена задача розширення кількості визначення параметрів діючих ЕГК з використанням енергетичного критерію на базі методу миттєвої потужності. Поставлена задача вирішується тим, що запропонований спосіб визначення параметрів ЕГК полягає в формуванні на вхід системи керування перетворювачем частоти тестового гармонічного впливу, виборі необхідної схеми заміщення ЕГК і визначенні кількості невідомих параметрів; обчисленні сигналів миттєвої потужності на всіх елементах вибраної схеми заміщення ЕГК, представленні їх математичними рядами Фур'є, на основі яких складається система ідентифікаційних рівнянь, що базуються на рівняннях енергобалансу по постійній і змінним складовим миттєвої потужності. Рішення ідентифікаційних рівнянь дозволяє визначити активний та індуктивний гідравлічні опори насосу й трубопроводу, активний гідравлічний опір споживача, енергетичні показники ЕГК, а саме втрати потужності на елементах схеми заміщення та ККД. Запропонований спосіб ідентифікації параметрів ЕГК дозволяє вибрати енергоефективний режим роботи насосного агрегату на трубопровідну мережу і зробити висновок про доцільність подальшої експлуатації технологічного обладнання, підвищити надійність використання електрогідравлічного обладнання. Суть корисної моделі пояснюється кресленням. 1 UA 87460 U 5 10 15 20 25 На фіг. 1 зображена - еквівалентна електрична схема заміщення ЕГК, на якій прийняті 2 позначення: H0v (t) - гідравлічне джерело енергії (насос); Hst - джерело статичного протитиску; Rp - нелінійний активний опір насоса; Rnet - активний гідравлічний опір трубопроводу; Lnet індуктивний гідравлічний опір трубопроводу; Rcon - активний опір споживача; Q(t) продуктивність на виході насосного агрегату. На фіг. 2 наведено - алгоритм визначення параметрів ЕГК, на якому прийняті позначення: uzad(t) - тестовий гармонічний вплив; U0, Uvar - постійна й змінна складові тестового впливу, відповідно; Ω - кутова частота; t - проміжок часу, на якому аналізуються відповідні сигнали; f частота зміни вхідного сигналу; φ - кут зсуву фази сигналу задання відносно початку координат; Qn - номінальне значення продуктивності; v(t) - відносна частота обертання насосного агрегату; n(t), nn - поточне й номінальне значення частоти обертання, відповідно; Q(t) - продуктивність на виході насосного агрегату; pin(t) - миттєва потужність на виході гідравлічного джерела (насоса), де Н0 - напір, що створюється насосом при нульовій продуктивності; pst(t) - гідравлічна потужність в трубопровідній мережі, що витрачається на подолання протитиску; Hst - джерело статичного протитиску; pRp (t) – гідравлічна потужність на активному опорі насоса; pRnet (t) гідравлічна потужність на активному опорі трубопроводу; pRcon (t) - гідравлічна потужність на активному опорі споживача; pLnet (t) - гідравлічна потужність на реактивному опорі трубопроводу; Rp - нелінійний активний опір насоса; Rnet - активний гідравлічний опір трубопроводу; Lnet індуктивний гідравлічний опір трубопроводу; Rcon - активний опір споживача; pi·(t) - сигнал миттєвої потужності на і-тому елементі ЕГК; Р0і - постійна складова миттєвої потужності на ітому елементі ЕГК; Раk i, Pbk i – амплітуда косинусної й синусної складових k-тοϊ гармоніки потужності на і-тому елементі ЕГК; k - номер відповідної гармоніки потужності. Спосіб реалізовано наступним чином (Фіг. 2). Для вирішення задачі ідентифікації параметрів ЕГК на вхід системи керування перетворювачем частоти задається тестовий гармонічний вплив, що включає постійну U0 та змінну Uvar складові: uzad (t) U0 Uv ar cos(t ) , 30 (1) де Ω = 2πf - кутова частота; f - частота зміни вхідного сигналу; φ - кут зсуву фази сигналу завдання відносно початку координат. Зміна напруги в часі, підведеної до статорних обмоток двигуна, приводить, в свою чергу, до зміни відносної частоти обертання асинхронного двигуна: v(t) v 0 vm cost v 0 v a cost vb sint , 35 де v0, vm - амплітуда постійної й змінної складових сигналу частоти обертання, відповідно; va, vb - ортогональні косинусна й синусна складові сигналу відносної частоти обертання, відповідно; ψ - кут зсуву фази сигналу. Тоді продуктивність на виході насосного агрегату є функцією часу вигляду: Q(t) Qnv(t) Q0 Qa cost Qb sint , 40 (2) (3) де Q0, Qa, Qb - амплітудні значення постійної та ортогональних косинусної й синусної складових сигналу продуктивності, відповідно; Qn – номінальне значення продуктивності. Формування сигналу зміни продуктивності на виході насосного агрегату вигляду (3) дозволяє отримати необхідну кількість складових в сигналах миттєвої потужності на елементах ЕГК (Фіг. 1). Потужність на виході гідравлічного джерела (насоса): 45 pin t 0 v 2 t Qt 0 v 0 v a cost v b sint 2 Q0 Qa cost Qb sint in 0 in1a cost in1b sint in 2a cos2t in 2b sin2t in 3a cos3t in 3b sin3t , (4) де H0 - напір, що створюється насосом при нульовій продуктивності; 2 2 2 in0 0Q0v0 0Q0v a / 2 0Q0vb / 2 0Qa v0v a 0Qbv0vb - постійна складова сигналу миттєвої гідравлічної потужності; 50 2 2 2 in1a 20Qav0v a 0Qa v0 30Qav a / 4 0Qavb / 4 0Qbv avb / 2, 2 UA 87460 U 2 2 2 in1b 0Qbv0 0Qbv a / 4 30Qbvb / 4 20Q0v0vb 0Qav avb / 2 - косинусна і синусна складові першої гармоніки миттєвої потужності гідравлічного джерела; 2 2 in2a 0Q0v a / 2 0Q0vb / 2 0Qav0v a 0Qbv0vb, in 2b 0Q0 v a v b 0Qb v 0 v a 0Qa v 0 v b , - косинусна і синусна складові другої гармоніки 5 миттєвої потужності; 2 2 in3a 0Qav a / 4 0Qavb / 4 0Qbv a vb / 2, 10 2 2 in3b 0Qbv a / 4 0Qa v a vb / 2 0Qbvb / 4, - косинусна і синусна складові третьої гармоніки миттєвої гідравлічної потужності на виході насоса. Гідравлічна потужність в трубопровідній мережі, що витрачається на подолання статичного протитиску, зумовленого підйомом рідини на певну висоту (Фіг. 1): pst (t) HstQ(t) Hst Q0 Qacos(t) Qbsin( t) st 0 st1a cos t st1b sin t , 15 (5) де Hst - джерело статичного протитиску; Pst 0=Hst Q0 - постійна складова сигналу миттєвої гідравлічної потужності; Pst 1a = Ηst Qa, Pst 1b=Hst Qb - косинусна і синусна складові першої гармоніки миттєвої гідравлічної потужності, відповідно. Потужність на активному опорі насоса (Фіг. 1): PRp (t) Rp Q3 (t) Q 4 (t) Q0 Qa cost Qb sint 4 PRp0 PRp cost 1a PRp sint PRp 2a cos2t PRp 2b sin2t PRp3a cos3t PRp3b sin3t 1b (6) PRp 4a cos4t PRp 4b sin4t , 20 де Rp = αQ(t) - нелінійний активний опір насоса; α - коефіцієнт апроксимації, що враховує сили в'язкого тертя між шарами рідини, рідиною і стінками гідравлічного тракту насоса; 4 2 2 4 2 2 2 2 4 Rp0 3Qa / 8 3QaQb / 2 3Qb / 8 3Q0Qa 3Q0Qb Q0 - постійна складова сигналу миттєвої гідравлічної потужності; 2 Rp 1a 3Q0QaQb 3Q0Q3 4Q3Qa , a 0 2 3 Rp 1b 3Q0Qb Qb 3Q0Qb 4Q3Qb , 0 миттєвої потужності; 25 - косинусна і синусна складові першої гармоніки 2 2 2 2 2 2 4 4 Rp 2a 3QaQb / 2 3Q0Qa 3Q0Qb Qa / 2 Qb / 2 , Rp 2b QaQ3 6Q3QaQb Q3 Qb , 0 a другої гармоніки потужності; 2 Rp 3a 3Q0QaQb Q0Q3 ; a 2 3 Rp 3b 3Q0QaQb Q0Qb ; потужності; косинусна й - косинусна й синусна складові синусна складові третьої гармоніки 4 4 Rp 4a Qa / 8 Qb / 8 ; 30 - косинусна й синусна складові четвертої гармоніки 3 Rp 4b QaQb / 2 Q3 Qb / 2 ; a потужності. Потужність активному опорі трубопроводу (Фіг. 1): pRnet t RnetQ3 t Q 2 t Q0 Qa cost Qb sint 2 Rnet 0 Rnet1a cost Rnet1b sin t Rnet 2a cos2t Rnet 2b sin 2t , 35 (7) де Rnet / Qt Rmt=b/Q(t) - активний гідравлічний опір трубопроводу; - коефіцієнт апроксимації, який враховує довжину ділянки проточної частини трубопроводу, його діаметр, кінематичну в'язкість і щільність; 3 UA 87460 U 2 2 2 Rnet0 Q0 Qa / 2 Qb / 2 - постійна складова сигналу миттєвої потужності; R net1a 2Q0Qa , R net1b 2Q0Qb - косинусна й синусна складові першої гармоніки миттєвої потужності; 5 2 2 Rnet 2a Qa / 2 Qb / 2, Rnet 2b QaQb - косинусна й синусна складові другої гармоніки потужності. Потужність на реактивному опорі трубопроводу (Фіг. 1): pL net t Lnet Qt d 2 d Q t Qnet v 2 t Q2 t Lnet 0 Lnet 1a cost dt dt Lnet 1b sin t Lnet 2a cos2t Lnet 2b sin 2t Lnet 3a cos3t Lnet 3b sin 3t (8) Lnet 4a cos4t Lnet 4b sin 4t , де Lnet = γv(t) - індуктивний гідравлічний опір трубопроводу; γ - коефіцієнт апроксимації, що враховує властивості рідини і геометричні параметри трубопроводу; 10 2 2 2 Lnet 0 2QnQ0Qav0vb QnQa v avb / 2 2QnQ0Qbv0v a QnQaQbv a / 2 QnQb v avb / 2 - постійна складова сигналу миттєвої потужності; 2 2 2 Lnet 1a 2QnQaQb v 0 v a QnQa v 0 v b QnQ0Qa v a v b 2QnQ0Qb v 0 QnQ0Qb v b / 2 2 2 3 QnQ0Qb v a / 2 QnQb v 0 v b , 2 2 2 Lnet 1b QnQa v 0 v a QnQb v 0 v a QnQ0Qa v a / 2 2 2 3 QnQ0Qa v b / 2 2QnQa Qb v 0 v b QnQ0Qb v a v b 2QnQaQb v 0 - косинусна й синусна складові першої гармоніки миттєвої потужності; 2 2 2 Lnet 2a 2QnQaQb v 0 2QnQ0QaQb v 0 v b 2QnQ0Qb v 0 v a QnQa Qb v a QnQa Qb v b , 2 2 2 2 2 2 2 2 Lnet 2b 2QnQ0Qb v 0 v b QnQa v 0 v QnQb v 0 QnQa v a / 2 QnQb v b / 2 15 2 2 2 2 2QnQ0Qa v 0 v a QnQa v b / 2 QnQb v a / 2 - косинусна й синусна складові другої гармоніки потужності; 2 2 2 Lnet 3a 2QnQaQb v 0 v a QnQ0Qb v a / 2 QnQa v 0 v b QnQ0Qa v a v b QnQa v 0 v b 2 2 QnQ0Qa v a v b QnQb v 0 v b QnQ0Qb v a / 2, 2 2 2 2 Lnet 3b QnQa v 0 v a QnQb v 0 v a QnQ0Qa v b / 2 QnQ0Qa v a / 2 QnQ0Qb v a v b 2QnQaQb v 0 v b - косинусна й синусна складові третьої гармоніки потужності; 2 2 2 2 Lnet 4a QnQa v a v b / 2 QnQaQb v b / 2 QnQaQb v a / 2 QnQb v a v b / 2, 20 2 2 2 2 2 2 2 2 Lnet 4b QnQaQb v a v b QnQa v b / 4 QnQb v b / 4 QnQb v a / 4 QnQa v a / 4 ; - косинусна й синусна складові четвертої гармоніки потужності. Потужність на активному опорі споживача (Фіг. 1): pRcont R conQ3 t R c Q0 Qa cost Qb sint 3 Rcon0 Rc1a cost Rc1b sin t Rc 2a cos2t Rcon2b sin 2t (9) Rc 3a cos3t Rc 3b sin 3t , 2 2 де Rcon активний опір споживача; Rcon0 RconQ3 3RconQ0Qa / 2 3RconQ0Qb / 2 - постійна 0 складова сигналу миттєвої потужності; 25 2 2 pRcon1a 3R conQ0Qa 3R conQa / 4 2 3R conQaQb / 4 ; 2 2 2 Rcon1b 3R conQ0Qb 3R conQaQb / 4 3R conQb / 4 ; першої гармоніки миттєвої потужності; косинусна 2 2 Rcon2a 3RconQ0Qa / 2 3RconQ0Qb / 2, Rcon2b 3RconQ0QaQb складові другої гармоніки потужності; 4 й синусна косинусна й складові синусна UA 87460 U 2 2 3 Rcon3a RconQ3 / 4 3RconQaQb / 4 , Rcon3b 3RconQaQb / 4 RconQb / 4 - косинусна й a синусна складові третьої гармоніки потужності. Для наведеної схеми заміщення ЕГК (Фіг. 1) загальне рівняння енергобалансу описується виразом: 5 pin (t) = pst (t) + pRp (t) + pRnet (t)+ pLnet (t) + pcon (t) (10) Тоді система рівнянь енергобалансу для постійної й гармонічних складових миттєвої потужності на елементах схеми заміщення ЕГК має вигляд: 10 15 20 in 0 st 0 Rp 0 Rnet 0 Lnet 0 Rcon 0 ; in 1a st 1a Rp 1a Rnet 1a Lnet 1a Rcon1a ; in 1b st 1b Rp 1b Rnet 1b Lnet 1b Rcon1b ; in 2a Rp 2a Rnet 2a Lnet 2a Rcon 2a ; in 2b Rp 2b Rnet 2b Lnet 2b Rcon 2b ; in 3a Rp 3a Lnet 3a Rcon 3a ; in 3b Rp 3b Lnet 3b Rcon 3b ; 0 Rp 4a Lnet 4a ; 0 Rp 4b Lnet 4b ; де Pin 0, Pst 0, PRp 0, PRnet 0, PLnet 0, PRcon 0 - постійні складові миттєвої потужності гідравлічного джерела, потужності, що витрачається на подолання протитиску, миттєвих потужностей на активному опорі насоса, на активному і індуктивному опорах трубопроводу й активному опорі споживача, відповідно; Pin ak, Pst ak, PRp ak, PRnet ak, PLnet ak, PRcon ak – амплітудні значення косинусної складової k-тοϊ гармоніки миттєвої потужності на елементах ЕГК, відповідно; Pin bk, Pst bk, PRp bk, PRnet bk, PLnet bk, PRcon bk - амплітудні значення синусної складової k-τοϊ гармоніки миттєвої потужності на елементах ЕГК, відповідно. Для знаходження п'яти невідомих параметрів ЕГК (активних гідравлічних опорів насоса Rp, трубопроводу Rnet і споживача Rcon, індуктивного опору трубопроводу Lnet і статичного напору Ηst в гідромережі) використані перші п'ять ідентифікаційних рівнянь системи (11), які відображають картину енергобалансу між найбільш вагомими складовими миттєвої потужності. їх рішення дозволили отримати наступні аналітичні вирази для визначення параметрів схеми заміщення ЕГК: статичного напору 2 2 2 2 2 2 st 0 v 0 v a / 2 v b / 2 Qa v 0 v a / Q0 Qb v 0 v b / Q0 R con Q0 Qa / 2 Qb / 2 4 2 2 2 2 4 2 0.375Qa / Q0 1.5Qa / Q0 1.5QaQb / Q0 Q3 3Q0Qa 0.375Qb / Q0 3Q0Qb 0 2 2 2 2 2 2Qnv 0 QnQa v 0 / Q0 Qnv a Qnv b QnQaQv a / 2Q0 QnQa v a v b / 2Q0 2 2 2 2QnQb v 0 v a Qnv 0 v b / Q0 QnQaQb v b / 2Q0 QnQa v b / 2Q0 QnQb v a v b / 2Q0 2 Q0 Qa / Q0 Qb / Q0 ; 25 коефіцієнтів апроксимації, що входять у вирази для визначення активного й індуктивного опорів насоса й трубопровідної мережі 2 2 2 0 Q0 v 0 v a Qa v 0 0.75Qa v a 0.25Qa v b 0.5Qb v a v b stQa 2Q0Qa 2 2 2 2QnQaQb v 0 v a QnQa v 0 v b QnQ0Qa v a v b 2QnQ0Qb v 0 0.5QnQ0Qb v b 2 2 2 2 2 2 1.5QnQ0Qb v a QnQb v 0 v b R con 3Q0Qa 0.75Q3 0.75QaQb / Q0Qa 3Qb 3Qa a 2 2 2 0 0.5v 0 / Q0 0.125 v a / Q0 0.375 v b / Q0 v 0 v b / Qb 0.25Qa v a v b / Q Q 0 b 2 2 2 2 0.5Hst / Q0 1.5Qa 1.5Qb 2Q0 0.5QnQa v 0 v a / Q0Qb 0.5QnQb v 0 v a / Q0 2 2 2 0.25QnQa v a / Qb 0.75QnQa v b / Qb QnQa v 0 v a / Q0 0.5Qn v a v b QnQa v 0 / Qb 2 2 R con 1.5Q0 0.375Qa / Q0 0.375Qb / Q0 ; 5 2 4Q0 ; UA 87460 U 2 2 2 2 2 2 2 2 4 4 0 0.5Q0 v a 0.5Q0 v b Qa v 0 v a Qb v 0 v b 1.5QaQb 3Q0Qa 3Q0Qa 0.5Qa 0.5Qb 2 2Qa v 0 2Q0Qa v 0 v b 2Q0 v 0 v a 2 2 2 2 ; 0.5Qa 0.5Qb R con 1.5Q0Qa 1.5Q0Qb / QbQn Q v2 Q v2 a a a b активного гідравлічного опору споживача R con 0 0.33 v a v b / QaQb 0.33 v 0 v a / Q0Qa 0.33 v 0 v b / Q0Qb 2 2 0.33Qb / Q0 2Q0 0.33Qa / Q0 0.33 / Q0 0.66Qn v 0 v b / Qa 2 0.33QnQa v 0 / Q0Qb 2 0.17QnQb v b / Q0Qa 5 10 2 0.33QnQb v 0 / Q0Qa 2 0.17QnQa v a / Q0Qb 2 0.67Qnv 0 v a / Qb 0.17QnQb v a / Q0Qa . Знаючи параметри схеми заміщення, визначаються енергетичні показники ЕГК: - активна потужність на виході гідравлічного джерела (насоса) Ріn 0 і на елементах схеми заміщення ЕГК PRp 0, PRnet 0, PLnet 0, Pst 0, - втрати потужності в насосі p 0 in 0 R p 0 ; - втрати потужності в трубопроводі Pnet 0 Ðin 0 - PRnet 0 - PLnet 0 - Pst 0 , - сумарні втрати потужності в ЕГК 0 in0 con0 ; - ККД насосного агрегату p Rp0 / in 0 . 15 20 25 30 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб ідентифікації параметрів електрогідравлічного комплексу, що включає визначення параметрів електрогідравлічного комплексу під час його експлуатації, який відрізняється тим, що на вхід системи керування перетворювачем частоти задають тестовий гармонічний вплив uzad (t) U0 Uv ar cos(t ) , який включає постійну U0 і змінну Uvar складові, де Ω=2πf кутова частота; f - частота зміни вхідного сигналу; φ - кут зсуву сигналу задання відносно початку координат; за допомогою датчика швидкості проводять дискретний вимір поточної частоти обертання n(t) привідного двигуна насоса, визначають відносну частоту обертання v(t)=n(t)/nn насосного агрегату, де nn - номінальне значення частоти обертання електродвигуна насоса; обчислюють сигнал продуктивності Q(t)=Qnv(t) на виході насосного агрегату, де Qn номінальне значення продуктивності насосного агрегату; залежно від вибраної схеми заміщення електрогідравлічного комплексу, визначають кількість невідомих параметрів; обчислюють сигнали миттєвої потужності на кожному елементі схеми заміщення електрогідравлічного 2 комплексу: на виході гідравлічного джерела (насоса) pin(t)=H0v (t)Q(t), де Но - напір, що створюють насосом при нульовій продуктивності; гідравлічної потужності pst(t)=HstQ(t) в трубопровідній мережі, що витрачають на подолання протитиску Hst; гідравлічної потужності 3 pRp(t)=RpQ (t) на активному опорі насоса Rp=Q(t), де - коефіцієнт апроксимації, який враховує сили в'язкого тертя між шарами рідини, рідиною і стінками гідравлічного тракту насоса; 3 гідравлічної потужності pRnet (t)=RnetQ (t) на активному опорі трубопроводу Rnet=/Q(t), де δ – коефіцієнт апроксимації, який враховує довжину ділянки проточної частини трубопроводу, його 3 діаметр, кінематичну в'язкість і густину; гідравлічної потужності pRcon (t)=Rcon Q (t) на активному опорі споживача Rcon; d гідравлічної потужності pL net t Lnet Qt Q 2 t на реактивному опорі трубопроводу dt Lnet v t , де γ - коефіцієнт апроксимації, який враховує властивості рідини і геометричні параметри трубопроводу; отримані сигнали потужності представляються тригонометричними рядами із використанням перетворень Фур'є, визначаються постійні (Pin 0, Pst 0, PRp 0, PRnet 0, PLnet 0, PRcon 0) і змінні косинусні (Pin ak, Pst ak, PRp ak, PRnet ak, PLnet ak, PRcon ak) й синусні (Pin bk, Pst bk, PRp bk, PRnet bk, PLnet bk, PRcon bk) гармонічні складові сигналів миттєвої гідравлічної потужності на виході джерела гідравлічного живлення та всіх елементів еквівалентної схеми заміщення електрогідравлічного комплексу, де k - номер відповідної гармоніки потужності; складають систему ідентифікаційних рівнянь на базі рівнянь енергобалансу постійної й гармонічних складових миттєвої потужності на виході гідравлічного джерела і всіх елементів схеми 40 45 6 UA 87460 U 5 заміщення, при цьому вибирається необхідна кількість значущих гармонік потужності, що відповідає кількості невідомих параметрів схеми заміщення; розв'язується система ідентифікаційних рівнянь, визначаються невідомі гідравлічні Hst, α, δ, γ, Rcon та енергетичні параметри електрогідравлічного комплексу: активна потужність на виході гідравлічного джерела (насоса) Ріn 0 й на елементах схеми заміщення ЕГК PRp 0, PRnet 0, PLnet 0, Pst 0, відповідно; втрати потужності в насосі p 0 in 0 R p 0 ; і в трубопроводі Pnet 0 Ðin 0 - PRnet 0 - PLnet 0 - Pst 0 , сумарні втрати потужності в електрогідравлічному комплексі 0 in 0 con0 ; коефіцієнта корисної дії насосного агрегату p Rp0 / in 0 . 7 UA 87460 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори англійськоюRodkin Dmytro Yosypovych, Korenkova Tetiana Valeriivna
Автори російськоюРодькин Дмитрий Иосифович, Коренькова Татьяна Валериевна
МПК / Мітки
МПК: G01R 11/50, F04D 13/00
Мітки: параметрів, комплексу, спосіб, ідентифікації, електрогідравлічного
Код посилання
<a href="https://ua.patents.su/10-87460-sposib-identifikaci-parametriv-elektrogidravlichnogo-kompleksu.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації параметрів електрогідравлічного комплексу</a>
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з некоректно заданою інформацією
Номер патенту: 76422
Опубліковано: 10.01.2013
Автори: Родькін Дмитро Ілліч, Чорний Олексій Петрович, Ромашихіна Жанна Іванівна, Родькін Дмитро Йосипович, Ромашихін Юрій Володимирович, Ящук Віталій Валерійович, Загірняк Михайло Васильович
МПК: G01R 27/08
Мітки: ідентифікації, двигунів, електромагнітних, заданою, інформацією, спосіб, асинхронних, параметрів, некоректно
Формула / Реферат:
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з некоректно заданою інформацією, який полягає у підключенні дослідного асинхронного двигуна до джерела напруги через датчики напруги та струму, подачі напруги до асинхронного двигуна, цифрового запису напруги та струму, математичній обробці отриманих результатів, визначенні складових миттєвої потужності, формуванні системи ідентифікаційних рівнянь на основі рівнянь...
Спосіб ідентифікації параметрів двигунів змінного струму
Номер патенту: 57650
Опубліковано: 10.03.2011
Автори: Родькін Дмитро Йосипович, Ромашихін Юрій Володимирович
МПК: G01R 27/08
Мітки: двигунів, струму, ідентифікації, спосіб, параметрів, змінного
Формула / Реферат:
Спосіб ідентифікації параметрів двигунів змінного струму, що полягає у підключенні дослідного двигуна до джерела полігармонійної напруги з заданим рівнем гармонік через датчики напруги та струму, подачі напруги до двигуна, цифровому записі напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонійних складових миттєвої потужності фаз, складанні системи...
Спосіб ідентифікації параметрів асинхронних двигунів

Номер патенту: 63928
Опубліковано: 25.10.2011
Автори: Родькін Дмитро Йосипович, Ромашихін Юрій Володимирович, Ромашихіна Жанна Іванівна, Родькін Дмитро Ілліч
МПК: G01R 27/08
Мітки: двигунів, спосіб, параметрів, асинхронних, ідентифікації
Формула / Реферат:
1. Спосіб ідентифікації параметрів асинхронних двигунів, що полягає у підключенні дослідного двигуна до джерела напруги за допомогою датчиків напруги та струму, подаванні напруги до двигуна, цифровому записі напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонійних складових миттєвої потужності фаз, складанні системи ідентифікаційних рівнянь на основі рівнянь...
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та струму
Номер патенту: 85325
Опубліковано: 11.11.2013
Автори: Шнуренко Єгор Анатолійович, Ромашихіна Жанна Іванівна, Ромашихін Юрій Володимирович, Родькін Дмитро Йосипович, Потапов Антон Леонідович
МПК: G01R 27/08
Мітки: сигналами, електромагнітних, ідентифікації, параметрів, двигунів, псевдополігармонічними, асинхронних, струму, спосіб, напруги
Формула / Реферат:
1. Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та стуму, що полягає у підключенні дослідного двигуна до джерела синусоїдної напруги з заданим рівнем гармонік через датчики напруги та струму, поданні напруги до двигуна, запису у цифровому вигляді напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні...
Спосіб ідентифікації електромагнітних параметрів двигуна постійного струму
Номер патенту: 85773
Опубліковано: 25.11.2013
Автори: Мосюндз Дар'я Андріївна, Родькін Дмитро Йосипович, Колесник Віта Миколаївна
МПК: G01R 27/08
Мітки: двигуна, струму, ідентифікації, параметрів, постійного, спосіб, електромагнітних
Формула / Реферат:
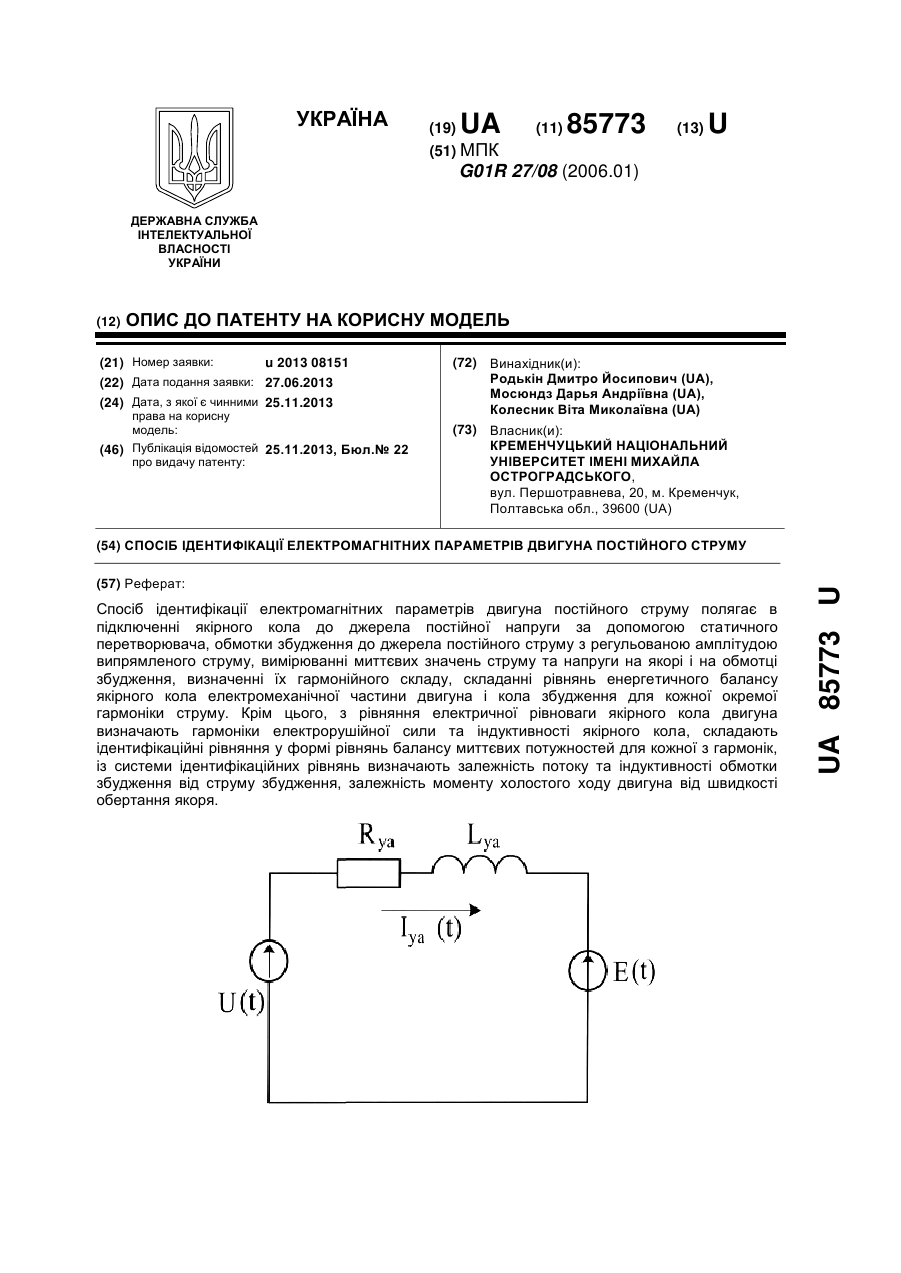
Спосіб ідентифікації електромагнітних параметрів двигуна постійного струму, що полягає в підключенні якірного кола до джерела постійної напруги за допомогою статичного перетворювача, обмотки збудження до джерела постійного струму з регульованою амплітудою випрямленого струму, вимірюванні миттєвих значень струму та напруги на якорі і на обмотці збудження, визначенні їх гармонійного складу, складанні рівнянь енергетичного балансу якірного кола...
Попередній патент: Спосіб визначення місцеположення об’єктів
Наступний патент: Спосіб визначення місцеположення об’єктів у двовимірному просторі
Випадковий патент: Напівпровідникове кисневе піноскло