Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та струму
Номер патенту: 85325
Опубліковано: 11.11.2013
Автори: Потапов Антон Леонідович, Ромашихін Юрій Володимирович, Родькін Дмитро Йосипович, Шнуренко Єгор Анатолійович, Ромашихіна Жанна Іванівна


Формула / Реферат
1. Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та стуму, що полягає у підключенні дослідного двигуна до джерела синусоїдної напруги з заданим рівнем гармонік через датчики напруги та струму, поданні напруги до двигуна, запису у цифровому вигляді напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонічних складових миттєвої потужності фаз, складанні системи ідентифікаційних рівнянь на основі рівнянь балансу гармонік потужності елементів схеми заміщення двигуна, визначенні електромагнітних параметрів асинхронних двигунів шляхом вирішення системи ідентифікаційних рівнянь, який відрізняється тим, що періоди синусоїдних сигналів напруги і струму обмежують з лівого або з правого боків на заданий кут, розкладають отримані сигнали напруги і струму в ряд Фур'є з обмеженим періодом сигналів, визначають гармонічні складові напруги та струму, визначають складові гармонік миттєвої потужності на елементах схеми заміщення асинхронного двигуна, формують рівняння балансу складових гармонік миттєвої потужності, визначають електромагнітні параметри та складові гармонік струму в контурах схеми заміщення асинхронного двигуна.
2. Спосіб за п. 1, який відрізняється тим, що обмеження періоду синусоїдних сигналів напруги та струму виконують одночасно з лівого та з правого боків на різні кути φ1≠φ2.
3. Спосіб за п. 1, який відрізняється тим,що виконують обмеження періоду синусоїдних сигналів напруги та струму симетрично на однакові кути φ1=φ2.
4. Спосіб за п.1, який відрізняється тим, що виконують обмеження періоду синусоїдних сигналів напруги та струму з лівого або з правого боків на заданий кут, та проводять симетрію 1-го або 2-го роду отриманого сигналу.
5. Спосіб за п. 1, який відрізняється тим, що виконують обмеження періоду синусоїдних сигналів напруги та струму симетрично з обох боків на заданий кут φ1=φ2 та проводять симетрію 1-го та 2-го роду отриманого сигналу.
6. Спосіб за п. 1, який відрізняється тим, що обмеження періоду синусоїдних сигналів напруги та струму виконують одночасно з лівого та з правого боків на різні кути φ1≠φ2 та проводять симетрію 1-го та 2-го роду отриманого сигналу.
Текст
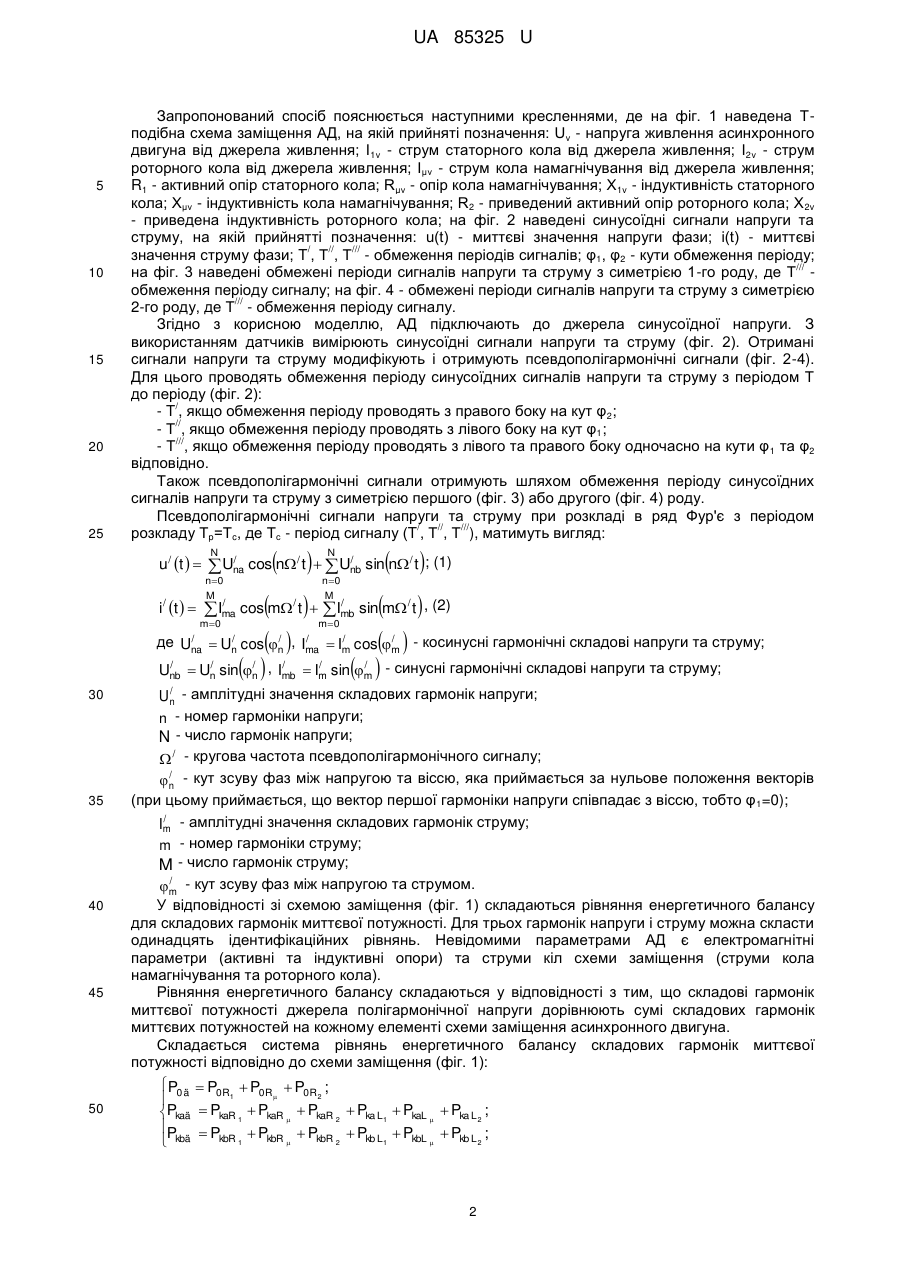
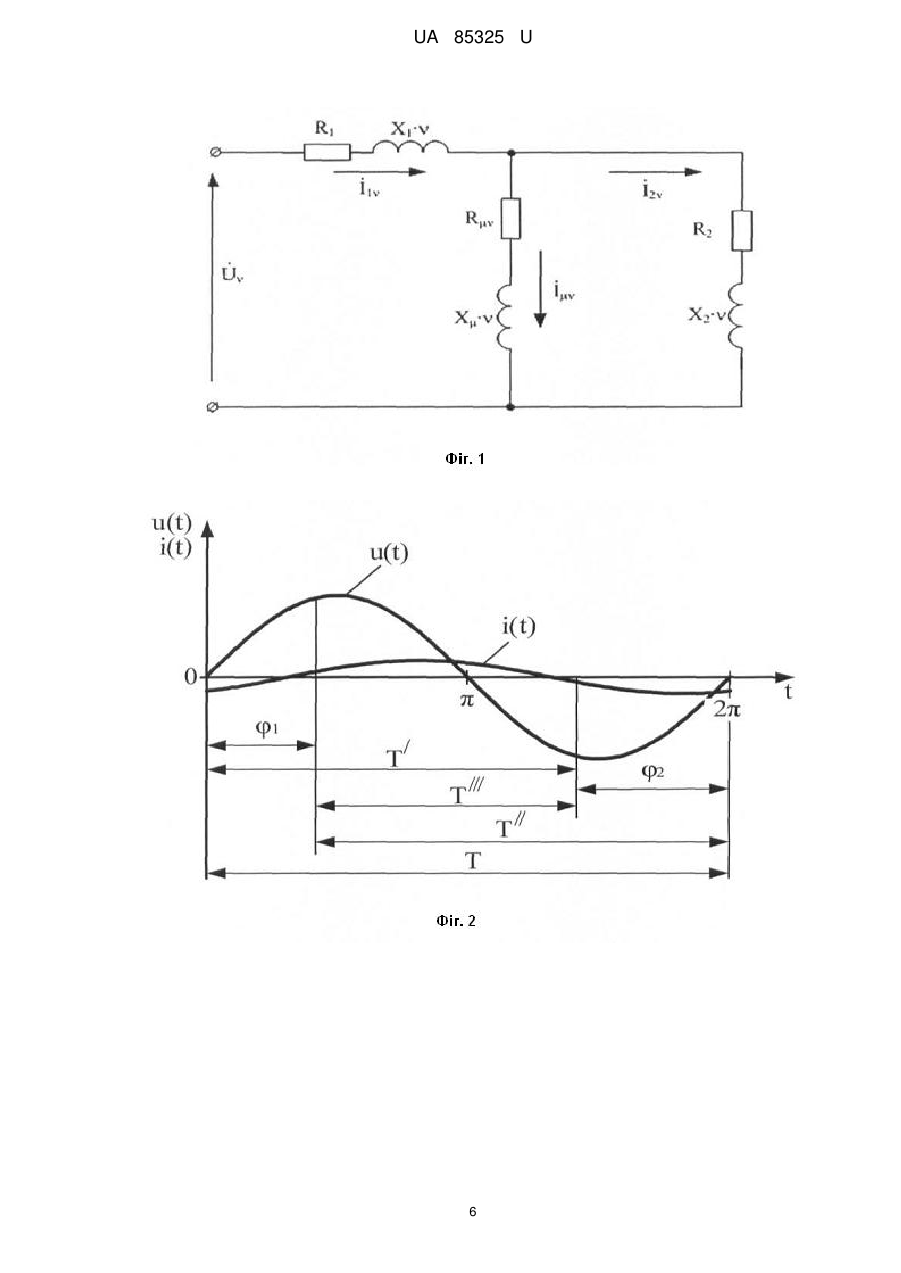
Реферат: Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та стуму включає підключення дослідного двигуна до джерела синусоїдної напруги з заданим рівнем гармонік через датчики напруги та струму, подання напруги до двигуна, запис у цифровому вигляді напруг та струмів фаз, математичну обробку отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначення гармонічних складових миттєвої потужності фаз, складання системи ідентифікаційних рівнянь на основі рівнянь балансу гармонік потужності елементів схеми заміщення двигуна, визначення електромагнітних параметрів асинхронних двигунів шляхом вирішення системи ідентифікаційних рівнянь. Періоди синусоїдних сигналів напруги і струму обмежують з лівого або з правого боків на заданий кут, розкладають отримані сигнали напруги і струму в ряд Фур'є з обмеженим періодом сигналів, визначають гармонічні складові напруги та струму, визначають складові гармонік миттєвої потужності на елементах схеми заміщення асинхронного двигуна, формують рівняння балансу складових гармонік миттєвої потужності, визначають електромагнітні параметри та складові гармонік струму в контурах схеми заміщення асинхронного двигуна. UA 85325 U (12) UA 85325 U UA 85325 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки, зокрема до методів визначення електромагнітних параметрів асинхронних двигунів. Корисна модель може бути використана при післяремонтних випробуваннях асинхронних двигунів у практиці електроремонтних підприємств, при приймально-здавальних випробуваннях в умовах заводів-виробників та для експлуатаційного моніторингу в умовах промислових підприємств. Відомий спосіб визначення активних та індуктивних опорів ротора [Способ определения активных и индуктивных сопротивлений рассеяния обмотки статора асинхронного двигателя: А.С. СССР 1372259: G01R 31/34 / Г.Г. Рогозин, Ю.И. Печуркин, В.И. Алексеев], за яким підключають нерухомий асинхронний двигун (АД) до однофазного джерела промислової частоти, вимірюють значення напруги, струму статора та кута між ними, відключають джерело у момент переходу струму через нуль, вимірюють миттєві значення загасаючої напруги. За отриманими даними розраховують активні та індуктивні опори ротора. Суттєві ознаки, які збігаються з корисною моделлю, що заявляється: - підключення нерухомого АД до однофазного джерела промислової частоти, вимірювання значень напруги, струму статора та кута між ними, розрахунок активних та індуктивних опорів ротора. Недоліками наведеного способу визначення параметрів є: - низька точність результатів, що обумовлюється неврахуванням опорів, еквівалентних втратам в сталі ротора та статора, а також ефекту витіснення струму в роторі; - необхідність у розбиранні АД для визначення індуктивного опору розсіювання статора; - розділення операцій при визначенні параметрів двигуна (статора за однією схемою, а ротора - за іншою) робить вказаний спосіб малопридатним для визначення параметрів АД в умовах виробництва. Найбільш близьким технічним рішенням до корисної моделі, вибраним як найближчий аналог способу, що заявляється, є спосіб ідентифікації електромагнітних параметрів асинхронних двигунів [Спосіб визначення електромагнітних параметрів асинхронних двигунів: Патент України № 58766: G01R27/08 / Д.Й. Родькін, Ю.В. Ромашихін, А.П. Калінов, Ж.І. Ухань, В.О. Мельников; заява № 201011459; опубліковано 26.04.2011, бюл. № 8/2011] за Т-подібною схемою заміщення з використанням рівнянь балансу складових миттєвої потужності. Спосіб полягає у підключенні АД до джерела живлення, вимірюванні сигналів напруги та струму статора протягом періоду змінної напруги Т, формуванні системи рівнянь балансу складових миттєвої потужності, порядок якої визначається кількістю невідомих, розрахунку системи рівнянь, визначенні електромагнітних параметрів асинхронного двигуна. До суттєвих ознак, які збігаються, належать: - підключення дослідного двигуна до джерела синусоїдної напруги з заданим рівнем гармонік через датчики напруги та струму; - підведення напруги до двигуна; - запис, у цифровому вигляді, напруги та струмів фаз; - математична обробка отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є; - визначення гармонічних складових миттєвої потужності фаз; - складання системи ідентифікаційних рівнянь на основі рівнянь балансу гармонік потужності елементів схеми заміщення двигуна; - визначення електромагнітних параметрів асинхронних двигунів шляхом вирішення системи ідентифікаційних рівнянь Недоліками наведеного способу визначення електромагнітних параметрів АД є: - залежність точності визначення електромагнітних параметрів АД при розв'язанні систем рівнянь від кута керування тиристорами і, як наслідок, від співвідношення рівнів гармонік у кривих напруги та струму; - необхідність у полігармонічному джерелі напруги, за яке використаний тиристорний регулятор напруги, що призводить до появи високочастотних складових напруги та струму та збільшення собівартості всього комплексу для ідентифікації електромагнітних параметрів АД. В основу корисної моделі поставлено задачу підвищити точність та достовірність ідентифікації електромагнітних параметрів асинхронних двигунів шляхом використання рівнянь балансу складових миттєвої потужності при живленні від джерела синусоїдної напруги. Поставлена задача вирішується підключенням АД через датчики напруги та струму до мережі з синусоїдною напругою, цифрового запису напруги та струму протягом періоду змінної напруги, визначення складових миттєвої потужності, складанням системи ідентифікаційних рівнянь для визначення електромагнітних параметрів АД, ідентифікацією електромагнітних параметрів АД, що забезпечує точність визначення параметрів електричних машин. 1 UA 85325 U 5 10 15 20 25 Запропонований спосіб пояснюється наступними кресленнями, де на фіг. 1 наведена Тподібна схема заміщення АД, на якій прийняті позначення: Uv - напруга живлення асинхронного двигуна від джерела живлення; I1v - струм статорного кола від джерела живлення; I2v - струм роторного кола від джерела живлення; Ιμν - струм кола намагнічування від джерела живлення; R1 - активний опір статорного кола; Rμν - опір кола намагнічування; X1v - індуктивність статорного кола; Χμν - індуктивність кола намагнічування; R2 - приведений активний опір роторного кола; X 2v - приведена індуктивність роторного кола; на фіг. 2 наведені синусоїдні сигнали напруги та струму, на якій прийнятті позначення: u(t) - миттєві значення напруги фази; i(t) - миттєві / // /// значення струму фази; T , Τ , Τ - обмеження періодів сигналів; φ1, φ2 - кути обмеження періоду; /// на фіг. 3 наведені обмежені періоди сигналів напруги та струму з симетрією 1-го роду, де Τ обмеження періоду сигналу; на фіг. 4 - обмежені періоди сигналів напруги та струму з симетрією /// 2-го роду, де Τ - обмеження періоду сигналу. Згідно з корисною моделлю, АД підключають до джерела синусоїдної напруги. З використанням датчиків вимірюють синусоїдні сигнали напруги та струму (фіг. 2). Отримані сигнали напруги та струму модифікують і отримують псевдополігармонічні сигнали (фіг. 2-4). Для цього проводять обмеження періоду синусоїдних сигналів напруги та струму з періодом Τ до періоду (фіг. 2): / - T , якщо обмеження періоду проводять з правого боку на кут φ 2; // - Τ , якщо обмеження періоду проводять з лівого боку на кут φ1; /// - Τ , якщо обмеження періоду проводять з лівого та правого боку одночасно на кути φ 1 та φ2 відповідно. Також псевдополігармонічні сигнали отримують шляхом обмеження періоду синусоїдних сигналів напруги та струму з симетрією першого (фіг. 3) або другого (фіг. 4) роду. Псевдополігармонічні сигнали напруги та струму при розкладі в ряд Фур'є з періодом / // /// розкладу Тp=Тc, де Тс - період сигналу (T , Τ , Τ ), матимуть вигляд: u / t N N n 0 n 0 M M / / i / t Ima cos m / t Imb sin m / t , (2) m0 m 0 / / / / / / де Una Un cos n , Ima Im cos m - косинусні гармонічні складові напруги та струму; / / / / / / Unb Un sin n , Imb Im sin m - синусні гармонічні складові напруги та струму; / Un - амплітудні значення складових гармонік напруги; 30 / / Una cosn / t Unb sinn / t ; (1) n - номер гармоніки напруги; N - число гармонік напруги; / - кругова частота псевдополігармонічного сигналу; 35 40 45 50 / n - кут зсуву фаз між напругою та віссю, яка приймається за нульове положення векторів (при цьому приймається, що вектор першої гармоніки напруги співпадає з віссю, тобто φ 1=0); / Im - амплітудні значення складових гармонік струму; m - номер гармоніки струму; M - число гармонік струму; / m - кут зсуву фаз між напругою та струмом. У відповідності зі схемою заміщення (фіг. 1) складаються рівняння енергетичного балансу для складових гармонік миттєвої потужності. Для трьох гармонік напруги і струму можна скласти одинадцять ідентифікаційних рівнянь. Невідомими параметрами АД є електромагнітні параметри (активні та індуктивні опори) та струми кіл схеми заміщення (струми кола намагнічування та роторного кола). Рівняння енергетичного балансу складаються у відповідності з тим, що складові гармонік миттєвої потужності джерела полігармонічної напруги дорівнюють сумі складових гармонік миттєвих потужностей на кожному елементі схеми заміщення асинхронного двигуна. Складається система рівнянь енергетичного балансу складових гармонік миттєвої потужності відповідно до схеми заміщення (фіг. 1): P0 ä P0R P0R P0R ; 1 2 Pkaä PkaR 1 PkaR PkaR 2 Pka L1 PkaL Pka L2 ; P P kbR 1 PkbR PkbR 2 Pkb L1 PkbL Pkb L 2 ; kbä 2 UA 85325 U де P0 ä , Pkaä , Pkbä - нульова, косинусні та синусні складові гармонік джерела полігармонічної напруги; P0 R1 , P0 R , P0R 2 - нульові складові миттєвої потужності відповідно на активних опорах кола 5 статора, кола намагнічування та роторного кола; PkaR 1 , PkaR , PkaR 2 - косинусні складові миттєвої потужності на k-ій гармоніці відповідно на активних опорах кола статора, кола намагнічування та роторного кола; Pka L1 , PkaL , Pka L 2 - косинусні складові миттєвої потужності на k-ій гармоніці відповідно на індуктивних опорах кола статора, кола намагнічування та роторного кола; PkbR 1 , PkbR , PkbR 2 - синусні складові миттєвої потужності на k-ій гармоніці відповідно на 10 активних опорах кола статора, кола намагнічування та роторного кола; Pkb L1 , PkbL , Pkb L 2 - синусні складові миттєвої потужності на k-ій гармоніці відповідно на індуктивних опорах кола статора, кола намагнічування та роторного кола. При використанні трьох гармонік напруги та струму система енергетичного балансу записується наступним чином: R1((I1a1 )2 (I1b1 )2 (I1a3 )2 (I1b3 )2 (I1a5 )2 (I1b5 )2 ) R ((Ia1 )2 15 (Ib1 )2 (Ia3 )2 (Ib3 )2 (Ia5 )2 (Ib5 )2 ) R 2 ((I2a1 )2 (I2b1 )2 (I2 a3 )2 (I2b3 )2 (I2a5 )2 (I2b5 )2 ) U11I1a1 U13 I1a3 U15 I1a5 ; L1( 2I1a1I1b1 2I1a1I1b3 2I1b1I1a3 2I1a3 I1b5 2I1b3 I1a5 ) L ( 2Ia1Ib1 2Ia1Ib3 2Ib1Ia3 2Ia3 Ib5 2Ib3 Ia5 ) L 2 ( 2I2 a1I2b1 2I2 a1I2b3 2I2b1I2 a3 2I2a3 I2b5 2I2b3 I2 a5 ) R1((I1a1 )2 (I1b1 )2 2I1a1I1a3 2I1b1I1b3 2I1a3 I1a5 2I1b3 I1b5 ) R ((Ia1 )2 (Ib1 )2 2Ia1Ia3 2Ib1Ib3 2Ia3 Ia5 2Ib3 Ib5 ) R 2 ((I2a1 )2 (I2b1 )2 2I2 a1I2a3 2I2b1I2b3 2I2a3 I2 a5 2I2b3 I2b5 )2 ) U11I1a1 U11I1a3 U13 I1a1 U13 I1a5 U15 I1a3 ; L1( (I1a1 )2 (I1b1 )2 2I1a1I1a3 2I1b1I1b3 2I1a3 I1a5 2I1b3 I1b5 ) L ( (Ia1 )2 (Ib1 )2 2Ia1Ia3 2Ib1Ib3 2Ia3 Ia5 2Ib3 Ib5 ) L 2 ( (I2a1 )2 (I2b1 )2 2I2a1I2a3 2I2b1I2b3 2I2a3 I2a5 2I2b3 I2b5 ) R1( 2I1a1I1b1 2I1a1I1b3 2I1b1I1a3 2I1a3 I1b5 2I1b3 I1a5 ) R ( 2Ia1Ib1 2Ia1Ib3 2Ib1Ia3 2Ia3 Ib5 2Ib3 Ia5 ) R 2 ( 2I2a1I2b1 2I2a1I2b3 2I2b1I2a3 2I2a3 I2b5 2I2b3 I2a5 ) U11I1b1 U11I1b3 U13 I1b1 U13 I1b5 U15 I1b3 ; 20 L1( 4I1a1I1b3 4I1a1I1b5 4I1b1I1a3 4I1b1I1a5 ) L ( 4Ia1Ib3 4Ia1Ib5 4Ib1Ia3 4Ib1Ia5 ) L 2 ( 4I2a1I2b3 4I2a1I2b5 4I2b1I2a3 4I2b1I2a5 ) R1( 2I1a1I1a3 2I1a1I1a5 2I1b1I1b3 2I1b1I1b5 ) R ( 2Ia1Ia3 2Ia1Ia5 2Ib1Ib3 2Ib1Ib5 ) R 2 ( 2I2a1I2a3 2I2a1I2a5 2I2b1I2b3 2I2b1I2b5 ) U11I1a3 U11I1a5 U13 I1a1 U15 I1a1 ; 3 ; UA 85325 U L1( 4I1a1I1a3 4I1a1I1a5 4I1b1I1b3 4I1b1I1b5 ) L ( 4Ia1Ia3 4Ia1Ia5 4Ib1Ib3 4Ib1Ib5 ) L 2 ( 4I2a1I2a3 4I2a1I2a5 4I2b1I2b3 4I2b1I2b5 ) R1( 2I1a1I1b3 2I1a1I1b5 2I1b1I1a3 2I1b1I1a5 ) R ( 2Ia1Ib3 2Ia1Ib5 2Ib1Ia3 2Ib1Ia5 ) R 2 ( 2I2a1I2b3 2I2a1I2b5 2I2b1I2a3 2I2b1I2a5 ) U11I1b3 U11I1b5 U13 I1b1 U15 I1b1 ; L1( 6I1a1I1b5 6I1b1I1a5 6I1a3 I1b3 ) L ( 6Ia1Ib5 6Ib1Ia5 6Ia3 Ib3 ) L 2 ( 6I2a1I2b5 6I2b1I2a5 6I2a3 I2b3 ) R1((I1a3 )2 (I1b3 )2 2I1a1I1a5 2I1b1I1b5 ) R ((Ia3 )2 (Ib3 )2 2Ia1Ia5 2Ib1Ib5 ) R 2 ((I2a3 )2 (I2b3 )2 ( 2I2a1I2a5 2I2b1I2b5 ) U11I1a5 U13 I1a3 U15 I1a1 ; L1( 3(I1a3 )2 3(I1b3 )2 6I1a1I1a5 6I1b1I1b5 ) L ( 3(Ia3 )2 3(Ib3 )2 6Ia1Ia5 6Ib1Ib5 ) L 2 ( 3(I2a3 )2 3(I2b3 )2 6I2a1I2a5 5 6I2b1I2b5 ) R1( 2I1a1I1b5 2I1b1I1a 5 2I1a3 I1b3 ) R ( 2Ia1Ib5 2Ib1Ia5 2Ia3 Ib3 ) R 2 ( 2I2a1I2b5 2I2b1I2a5 2I2a3 I2b3 ) U11I1b5 U13 I1b3 U15 I1b1 ; L1(8I1a3 I1b5 8I1b3 I1a5 ) L (8Ia3 Ib5 8Ib3 Ia5 ) L 2 (8I2a3 I2b5 8I2b3 I2a5 ) R1( 2I1a3 I1a5 2I1b3 I1b5 ) R ( 2Ia3 Ia5 2Ib3 Ib5 ) R 2 ( 2I2a3 I2a5 2I2b3 I2b5 ) U13 I1a5 U15 I1a3 ; L1( 8I1a3 I1a5 8I1b3 I1b5 ) L ( 8Ia3 Ia5 8Ib3 Ib5 ) L 2 ( 8I2a3 I2a5 8I2b3 I2b5 ) R1( 2I1a3 I1b5 2I1b3 I1a5 ) R ( 2Ia3 Ib5 2Ib3 Ia5 ) R 2 ( 2I2a3 I2b5 2I2b3 I2a5 ) U13 I1b5 U15 I1b3 ; 10 L1(10I1a5 I1b5 ) L (10Ia5 Ib5 ) L 2 (10I2a5 I2b5 ) R1((I1a5 )2 (I1b5 )2 ) R ((Ia5 )2 (Ib5 )2 ) R 2 ((I2a5 )2 (I2b5 )2 ) U15 I1a5 ; L1( 5(I1a5 )2 5(I1b5 )2 ) L ( 5(Ia5 )2 5(Ib5 )2 L 2 ( 5(I2a5 )2 5(I2b5 )2 ) R1( 2I1a5 I1b5 ) R ( 2Ia5 Ib5 ) R 2 ( 2I2a5 I2b5 ) U15 I1b5 ; I2a1 Ia1 I1a1 I2b1 Ib1 I1b1 I2a3 Ia3 I1a3 I2b3 Ib3 I1b3 I2a5 Ia5 I1a5 I2b5 Ib5 I1b5 , 15 де U1 , U1 , U1 - гармонічні складові напруги статорного кола; 3 5 1 I11 , I13 , I15 - гармонічні складові струму статорного кола; I 1 , I 3 , I 5 - гармонічні складові струму кола намагнічування; I21 , I2 3 , I2 5 - гармонічні складові струму роторного кола; 20 I1a1 , I1a3 , I1a5 , I1b1 , I1b3 , I1b5 - косинусні та синусні гармонічні складові струму статорного кола; 4 UA 85325 U Ia1 , Ia3 , Ia5 , Ib1 , Ib3 Ib5 - косинусні та синусні гармонічні складові струму кола намагнічування; I2a1 , I2a3 , I2a5 , I2b1 , I2b3 , I2b5 - косинусні та синусні гармонічні складові струму роторного 5 кола. Розрахунковим шляхом визначають значення струмів кіл схеми заміщення та електромагнітних параметрів АД. Корисна модель дозволяє підвищити надійність використання АД за рахунок збільшення точності визначення електромагнітних параметрів схеми заміщення АД при живленні від джерела синусоїдної напруги. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 1. Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та стуму, що полягає у підключенні дослідного двигуна до джерела синусоїдної напруги з заданим рівнем гармонік через датчики напруги та струму, поданні напруги до двигуна, запису у цифровому вигляді напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонічних складових миттєвої потужності фаз, складанні системи ідентифікаційних рівнянь на основі рівнянь балансу гармонік потужності елементів схеми заміщення двигуна, визначенні електромагнітних параметрів асинхронних двигунів шляхом вирішення системи ідентифікаційних рівнянь, який відрізняється тим, що періоди синусоїдних сигналів напруги і струму обмежують з лівого або з правого боків на заданий кут, розкладають отримані сигнали напруги і струму в ряд Фур'є з обмеженим періодом сигналів, визначають гармонічні складові напруги та струму, визначають складові гармонік миттєвої потужності на елементах схеми заміщення асинхронного двигуна, формують рівняння балансу складових гармонік миттєвої потужності, визначають електромагнітні параметри та складові гармонік струму в контурах схеми заміщення асинхронного двигуна. 2. Спосіб за п. 1, який відрізняється тим, що обмеження періоду синусоїдних сигналів напруги та струму виконують одночасно з лівого та з правого боків на різні кути φ1≠φ2. 3. Спосіб за п. 1, який відрізняється тим, що виконують обмеження періоду синусоїдних сигналів напруги та струму симетрично на однакові кути φ1=φ2. 4. Спосіб за п. 1, який відрізняється тим, що виконують обмеження періоду синусоїдних сигналів напруги та струму з лівого або з правого боків на заданий кут, та проводять симетрію 1го або 2-го роду отриманого сигналу. 5. Спосіб за п. 1, який відрізняється тим, що виконують обмеження періоду синусоїдних сигналів напруги та струму симетрично з обох боків на заданий кут φ1=φ2 та проводять симетрію 1-го та 2-го роду отриманого сигналу. 6. Спосіб за п. 1, який відрізняється тим, що обмеження періоду синусоїдних сигналів напруги та струму виконують одночасно з лівого та з правого боків на різні кути φ1≠φ2 та проводять симетрію 1-го та 2-го роду отриманого сигналу. 5 UA 85325 U 6 UA 85325 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюRodkin Dmytro Yosypovych, Romashykhin Yurii Volodymyrovych, Romashykhina Zhanna Ivanivna
Автори російськоюРодькин Дмитрий Иосифович, Ромашихин Юрий Владимирович, Ромашихина Жанна Ивановна
МПК / Мітки
МПК: G01R 27/08
Мітки: струму, двигунів, сигналами, спосіб, ідентифікації, параметрів, асинхронних, псевдополігармонічними, напруги, електромагнітних
Код посилання
<a href="https://ua.patents.su/9-85325-sposib-identifikaci-elektromagnitnikh-parametriv-asinkhronnikh-dviguniv-z-psevdopoligarmonichnimi-signalami-naprugi-ta-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та струму</a>
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з некоректно заданою інформацією
Номер патенту: 76422
Опубліковано: 10.01.2013
Автори: Загірняк Михайло Васильович, Чорний Олексій Петрович, Родькін Дмитро Ілліч, Ящук Віталій Валерійович, Родькін Дмитро Йосипович, Ромашихіна Жанна Іванівна, Ромашихін Юрій Володимирович
МПК: G01R 27/08
Мітки: заданою, параметрів, асинхронних, двигунів, інформацією, некоректно, спосіб, ідентифікації, електромагнітних
Формула / Реферат:
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з некоректно заданою інформацією, який полягає у підключенні дослідного асинхронного двигуна до джерела напруги через датчики напруги та струму, подачі напруги до асинхронного двигуна, цифрового запису напруги та струму, математичній обробці отриманих результатів, визначенні складових миттєвої потужності, формуванні системи ідентифікаційних рівнянь на основі рівнянь...
Спосіб ідентифікації параметрів асинхронних двигунів

Номер патенту: 63928
Опубліковано: 25.10.2011
Автори: Ромашихін Юрій Володимирович, Родькін Дмитро Ілліч, Ромашихіна Жанна Іванівна, Родькін Дмитро Йосипович
МПК: G01R 27/08
Мітки: асинхронних, спосіб, ідентифікації, параметрів, двигунів
Формула / Реферат:
1. Спосіб ідентифікації параметрів асинхронних двигунів, що полягає у підключенні дослідного двигуна до джерела напруги за допомогою датчиків напруги та струму, подаванні напруги до двигуна, цифровому записі напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонійних складових миттєвої потужності фаз, складанні системи ідентифікаційних рівнянь на основі рівнянь...
Спосіб визначення електромагнітних параметрів асинхронних двигунів
Номер патенту: 58766
Опубліковано: 26.04.2011
Автори: Родькін Дмитро Йосипович, Мельников Вячеслав Олександрович, Ухань Жанна Іванівна, Ромашихін Юрій Володимирович, Калінов Андрій Петрович
МПК: G01R 27/08
Мітки: асинхронних, двигунів, спосіб, визначення, параметрів, електромагнітних
Формула / Реферат:
1. Спосіб визначення електромагнітних параметрів асинхронних двигунів, що полягає у підключенні електричної машини до тиристорного регулятора напруги, живленні обмоток статора полігармонійною напругою, вимірюванні сигналів напруги та струму статора по фазах, запису вимірюваних сигналів напруги та струму в ЕОМ, представленні напруги та струму у вигляді рядів за допомогою перетворення Фур'є, формуванні систем рівнянь із використанням складових...
Спосіб ідентифікації параметрів двигунів змінного струму
Номер патенту: 57650
Опубліковано: 10.03.2011
Автори: Родькін Дмитро Йосипович, Ромашихін Юрій Володимирович
МПК: G01R 27/08
Мітки: спосіб, двигунів, змінного, параметрів, ідентифікації, струму
Формула / Реферат:
Спосіб ідентифікації параметрів двигунів змінного струму, що полягає у підключенні дослідного двигуна до джерела полігармонійної напруги з заданим рівнем гармонік через датчики напруги та струму, подачі напруги до двигуна, цифровому записі напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонійних складових миттєвої потужності фаз, складанні системи...
Спосіб визначення електромагнітних параметрів машин змінного струму
Номер патенту: 51956
Опубліковано: 10.08.2010
Автори: Рєзнік Дмитро Володимирович, Калінов Андрій Петрович, Воробейчик Олег Станіславович
МПК: G01R 27/28
Мітки: параметрів, визначення, електромагнітних, спосіб, струму, машин, змінного
Формула / Реферат:
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення ( - номінальне сковзання,
Попередній патент: Пристрій керованого охолодження електричних машин з самовентиляцією
Наступний патент: Спосіб комплексного лікування внутрішньочерепної гіпертензії з використанням мікстури професора малахова в.о.
Випадковий патент: Спосіб лікування гіпоксичного ураження центральної нервової системи у новонароджених дітей