Спосіб цифрового аерокосмічного знімання
Номер патенту: 97889
Опубліковано: 26.03.2012
Автори: Зацерковний Віталій Іванович, Беленок Вадим Юрійович, Бурачек Всеволод Германович, Нисторяк Іван Олександрович
Формула / Реферат
Спосіб цифрового аерокосмічного знімання, заснований на субпіксельній технології, що полягає у зйомці місцевості цифровою фотознімальною камерою з блоком сканування з літального апарата з наступною комп'ютерною обробкою матеріалів, який відрізняється тим, що при покадровому скануванні місцевості у групі кадрів для кожного блока кадрів виконують "n" експозицій з інтервалом, який містить дробову частину проекції пікселя фотоприймальної матриці знімальної камери на місцевість, при цьому контролюють швидкість переміщення зображення місцевості на фотоприймальній матриці і за цим параметром регулюють швидкість сканування по осі, перпендикулярній до напрямку поздовжньої осі літального апарата, і задають точки експозицій та інтервали між цими точками.
Текст
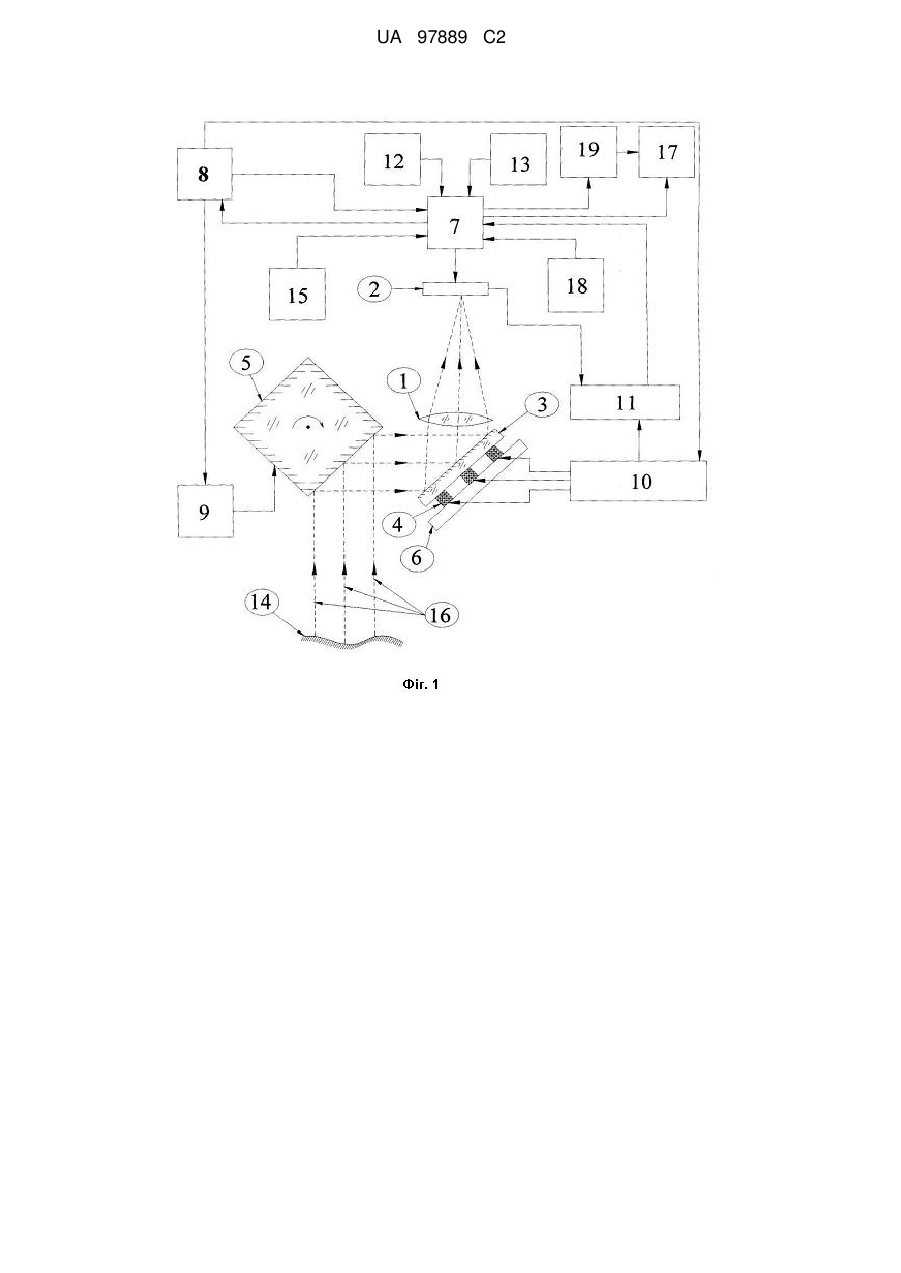
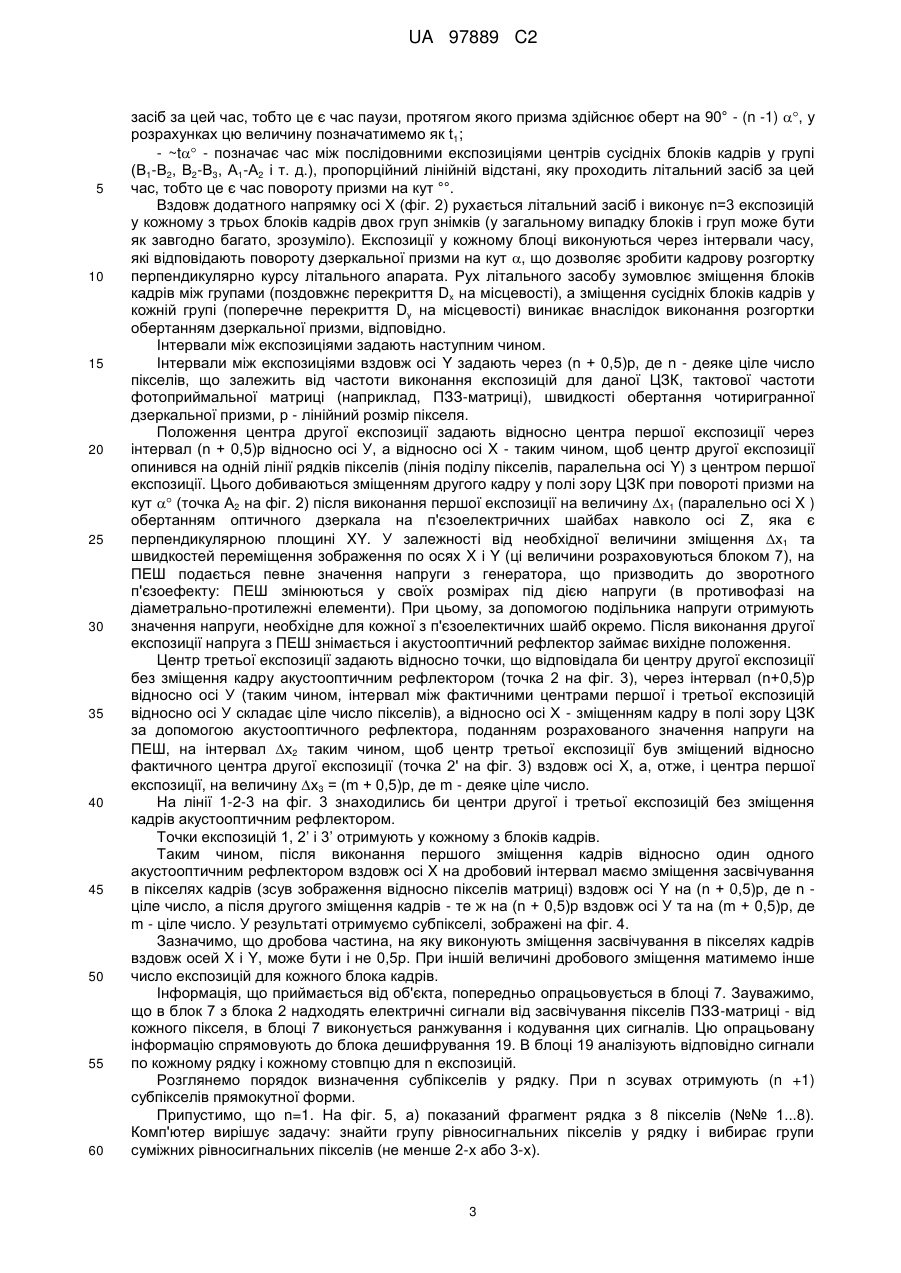
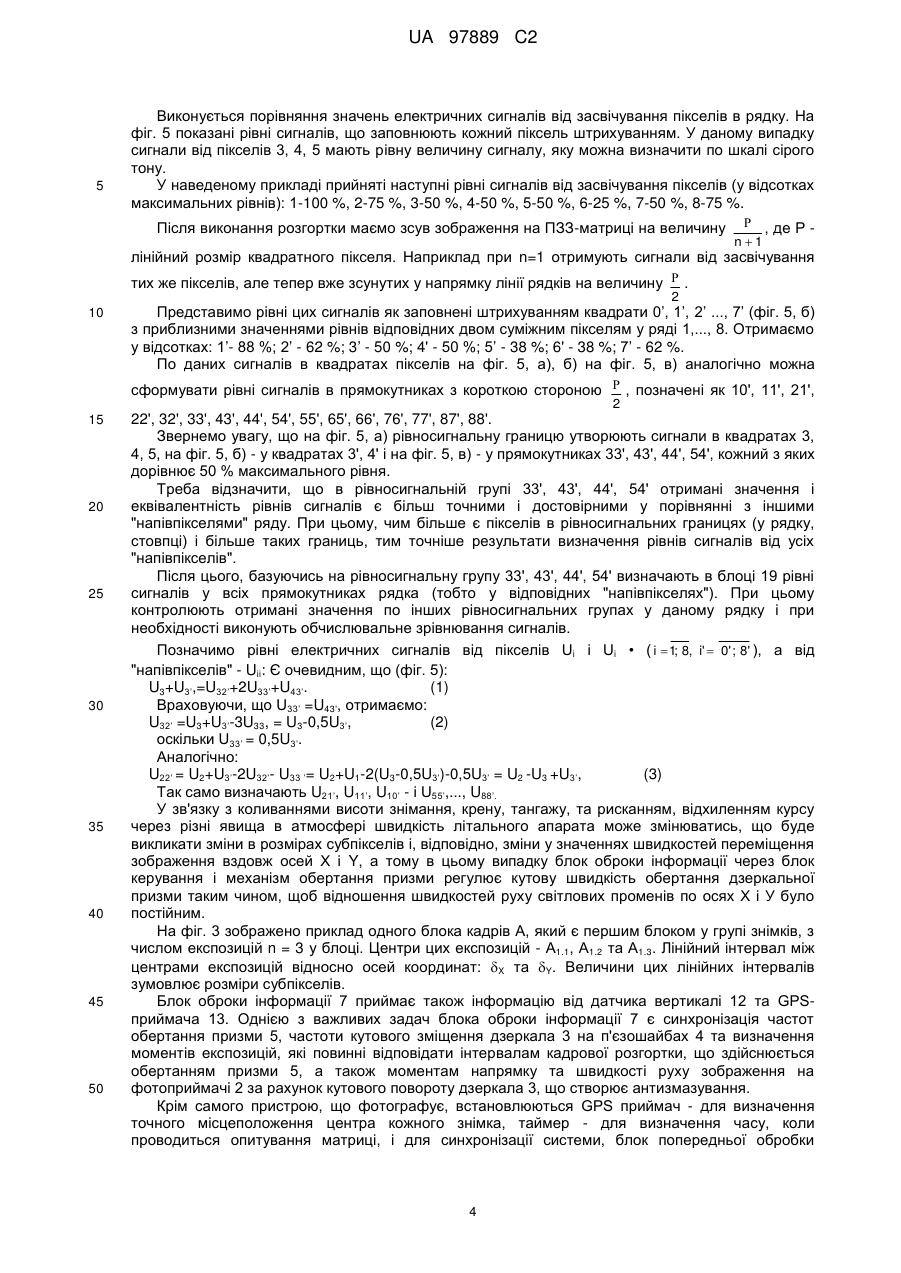
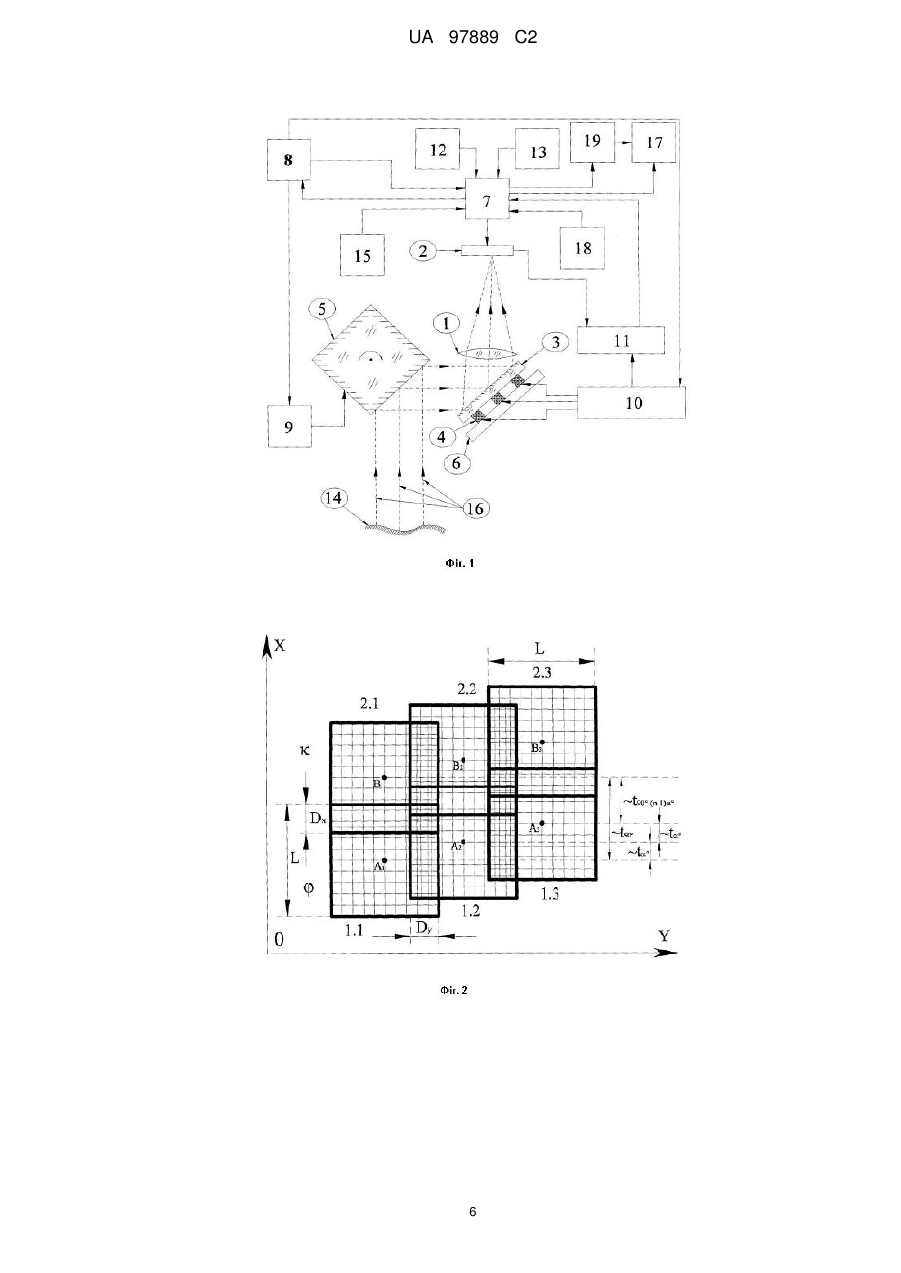
Реферат: Винахід належить до галузі аерокосмічних знімань. Спосіб цифрового аерокосмічного знімання заснований на субпіксельній технології і полягає у зйомці місцевості цифровою фотознімальною камерою з блоком сканування з літального апарата з наступною комп'ютерною обробкою матеріалів. При покадровому скануванні місцевості у групі кадрів для кожного блока кадрів виконують "n" експозицій з інтервалом, який містить дробову частину проекції пікселя фотоприймальної матриці знімальної камери на місцевість, при цьому контролюють швидкість переміщення зображення місцевості на фотоприймальній матриці і за цим параметром регулюють швидкість сканування по осі, перпендикулярній до напрямку поздовжньої осі літального апарата, і задають точки експозицій та інтервали між цими точками. Винахід дозволяє підвищити рентабельність виконання аерокосмічного знімання з підвищенням його розрізненості за рахунок отримання субпікселів і збільшенням кута поля зору знімальної системи. UA 97889 C2 (12) UA 97889 C2 UA 97889 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі аерокосмічних знімань. Відомий ряд способів цифрового аерофотознімання: - способи сканування місцевості з космосу цифровими знімальними системами [1]; - сканерний спосіб цифрового аерофотознімання з літака системою ADS40 (Airborne Digital Sensor), камера якої має три панхроматичні лінійки, скеровані у напрямках "вперед" (28° від надиру), "назад" (42° від надиру) та "у надир" [2, 3]; - спосіб покадрового знімання місцевості цифровою камерою, аналогічний способу традиційної аерофотозйомки [3]; - спосіб цифрового аерофотознімання з покадровим скануванням місцевості, описаний у роботі [4]. Недоліком першого способу є мале поле зору й низька розрізненість. При реалізації другого способу застосовуються прилади з зарядовим зв'язком (ПЗЗ) у вигляді лінійки, а для формування зображення застосовується принцип дії електрооптичного сканера. У системі розміщено одну біля одної дві лінійки, зміщені на півпікселя, що підвищує розрізненість удвічі, у надирному напрямку "працюють" ще чотири ПЗЗ-лінійки (у червоному, зеленому, блакитному та інфрачервоному спектральних діапазонах). Особливістю сканерного зображення є те, що воно формується зі смуг і кожна смуга має свій миттєвий центр проекції, а через те, що літак переміщується, суцільне зображення є деформованим. Недоліком третього способу є мале поле зору цифрової камери. Найбільш близьким аналогом є спосіб цифрового аерофотознімання з покадровим скануванням місцевості, описаний у роботі [4]. Для усунення вказаних недоліків застосовуються різноманітні способи одержання зображень субпіксельної розрізненості. Так, відомий спосіб та пристрій для реєстрації зображень [5], в якому забезпечується субпіксельна реєстрація країв на зображенні шляхом врахування відхилень розподілу яскравості від унімодального. Недоліком цього способу є відсутність фізичного вимірювання субпіксельних сигналів, тобто він є різновидом інтерполяції. Також відомий спосіб, що реалізується пристроєм для одержання зображень з реєстрацією субпіксельної інформації [6], в якому визначаються інтенсивності сигналів та центроїди місцерозташування сигналів в межах кожного пікселя. Недоліком цього пристрою є висока складність конструкції: кожний фотоприймальний елемент матриці обладнується декількома додатковими вимірювальними електродами та передпідсилювачами сигналів. Ще відомий спосіб, що реалізується пристроєм для одержання зображень із надрозрізненістю [7], в якому субпіксельний сигнал формується за допомогою додаткових дифракційних елементів з мікролінзами в кожному пікселі. Недоліком цього пристрою також є висока складність конструкції. Найбільш близьким до способу, що заявляється, є оптико-електронний пристрій та спосіб його функціонування [8], в якому здійснюється субпіксельний зсув зображення за рахунок додаткової оптичної системи. Цей спосіб й обрано за прототип. Недоліком цього способу є обмеження кількості субпікселів, що розрізняються, кількістю додаткових оптичних систем, що унеможливлює значне підвищення розрізнювальної здатності знімальної системи. Задачею винаходу є підвищення розрізненості аерокосмічного знімання і збільшення поля зору знімальної системи. Поставлена задача вирішується за рахунок створення способу цифрового аерокосмічного знімання, заснованого на субпіксельній технології, що полягає у зйомці місцевості цифровою фотознімальною камерою з блоком сканування з літального апарата з наступною комп'ютерною обробкою матеріалів, який відрізняється тим, що при покадровому скануванні місцевості у групі кадрів для кожного блока кадрів виконують "n" експозицій з інтервалом, який містить дробову частину проекції пікселя фотоприймальної матриці знімальної камери на місцевість, при цьому контролюють швидкість переміщення зображення місцевості на фотоприймальній матриці і за цим параметром регулюють швидкість сканування по осі, перпендикулярній до напрямку поздовжньої осі літального апарата, і задають точки експозицій та інтервали між цими точками. 2 Технічним результатом є підвищення розрізненості аерокосмічних знімків по площі в n разів за рахунок заміни пікселів субпікселями. Таким чином, при збереженні величини поля зору цифрової камери отримують підвищення розрізненості, або при збереженні розрізненості отримують збільшення поля зору. На фіг. 1 представлена схема пристрою, за допомогою якого реалізується запропонований спосіб, на якій відповідними цифрами позначено: 1 - об'єктив цифрової знімальної камери (ЦЗК); 1 UA 97889 C2 5 10 15 20 25 30 35 40 45 50 55 2 - багатоелементний фотоприймач (ПЗЗ-матриця) ЦЗК; 3 - оптичне дзеркало; 4 - п'єзоелектричні шайби (ПЕШ); 5 - чотиригранна дзеркальна призма, що відбиває; 6 - пластина-основа (ПЕШ), жорстко закріплена на корпусі пристрою; 7 - електронний блок обробки інформації; 8 - електронний блок керування; 9 - механізм обертання призми 5 навколо горизонтальної осі; 10 - генератор з розподільником напруги; 11 - перетворювач; 12 - датчик вертикалі; 13 - GPS-приймач; 14 - земна поверхня; 15 - датчик швидкості; 16 - промені світлового потоку, що йдуть в об'єктив пристрою від місцевості; 17 - блок запису і збереження інформації; 18 - блок вимірювання швидкості переміщення зображення; 19 - блок субпіксельного дешифрування. Пристрій встановлюється на літальному апараті, оптична вісь ЦЗК спрямована вниз по вертикалі. Усі оптико-механічні елементи та частина електронних елементів розміщені в єдиному корпусі. Елементи 1, 2 утворюють оптико-електронний блок, елементи 4, 6, 10 та 11 утворюють п'єзоелектричний блок, елементи 3 і 5 утворюють дзеркально-призмовий блок. Оптичне дзеркало та п'єзоелектричні шайби утворюють акустооптичний рефлектор. Пристрій працює по запропонованому способу наступним чином. За допомогою блока керування включають усі прилади та блоки пристрою. Світловий потік 16, що містить у собі зображення місцевості 14, через дзеркальну призму 5 й оптичне дзеркало 3 надходить на об'єктив 1 ЦЗК, який формує зображення місцевості у своїй картинній площині на робочій поверхні фотоприймача 2. Зображення місцевості у фотоприймачі 2 перетвориться в сукупність електричних сигналів, що надходять у перетворювач 11. Електричні сигнали з перетворювача 11, що несуть зображення в електронному коді, надходять у блок обробки інформації 7. Призму 5 обертають навколо горизонтальної осі з певною частотою, що дозволяє зробити кадрову розгортку перпендикулярно курсу літального апарата, значно збільшує поле зору ЦЗК й забезпечує необхідні поперечне та поздовжнє перекриття. Блок керування 8 задає необхідну частоту обертання призми 5. Вказані частоти визначаються в блоці оброки інформації 7 з врахуванням даних датчика швидкості 15 та передаються в блок керування 8. Обумовимось, що літальний засіб рухається вздовж осі X, а розгортку призмою виконують вздовж осі Y. Під час руху літального апарата в полі зору ЦЗК для кожного блока кадрів виконують "n" експозицій, де одна експозиція відповідає кадру блока. При цьому щільність точок експозицій задається через блок керування в залежності від необхідного поперечного та поздовжнього перекриттів. Кожній з "n" експозиції у блоці кадрів відповідає певне положення дзеркальної призми, неперервне обертання якої забезпечує розширення кута поля зору системи (цьому відповідають саме "n" кадрів блока, розміщених вздовж осі Y). При повороті дзеркальної призми на кут , крайні лівий і правий світлові промені, які обмежують пучок, котрий іде від земної поверхні та формує зображення, відхиляються на кут 2, розширюючи, таким чином, поле зору. На фіг. 2 для прикладу зображено дві групи знімків, позначених символами, а кожна група містить три блоки кадрів - 1.1, 1.2, 1.3 у першій групі, 2.1, 2.2, 2.3 у другій групі з кількістю експозицій n у кожному блоці кадрів. На фіг. 2: - L - ширина кадру на місцевості; - Dx - величина поздовжнього перекриття на місцевості; - Dy - величина поперечного перекриття на місцевості; - A1, А2, А3 - центри блоків кадрів першої групи знімків; - B1, B2, B3 - центри блоків кадрів другої групи знімків; - ~ t90°-(n-1) - позначає час між експозиціями А3 та A1 (у загальному випадку - між останньою експозицією останнього блока кадрів і-ої групи знімків та першою експозицією першого блока кадрів наступної, (і+1)-ої, групи знімків), пропорційний лінійній відстані, яку проходить літальний 2 UA 97889 C2 5 10 15 20 25 30 35 40 45 50 55 60 засіб за цей час, тобто це є час паузи, протягом якого призма здійснює оберт на 90° - (n -1) , у розрахунках цю величину позначатимемо як t1; - ~t - позначає час між послідовними експозиціями центрів сусідніх блоків кадрів у групі (В1-В2, В2-В3, А1-А2 і т. д.), пропорційний лінійній відстані, яку проходить літальний засіб за цей час, тобто це є час повороту призми на кут °°. Вздовж додатного напрямку осі X (фіг. 2) рухається літальний засіб і виконує n=3 експозицій у кожному з трьох блоків кадрів двох груп знімків (у загальному випадку блоків і груп може бути як завгодно багато, зрозуміло). Експозиції у кожному блоці виконуються через інтервали часу, які відповідають повороту дзеркальної призми на кут , що дозволяє зробити кадрову розгортку перпендикулярно курсу літального апарата. Рух літального засобу зумовлює зміщення блоків кадрів між групами (поздовжнє перекриття Dx на місцевості), а зміщення сусідніх блоків кадрів у кожній групі (поперечне перекриття Dy на місцевості) виникає внаслідок виконання розгортки обертанням дзеркальної призми, відповідно. Інтервали між експозиціями задають наступним чином. Інтервали між експозиціями вздовж осі Y задають через (n + 0,5)р, де n - деяке ціле число пікселів, що залежить від частоти виконання експозицій для даної ЦЗК, тактової частоти фотоприймальної матриці (наприклад, ПЗЗ-матриці), швидкості обертання чотиригранної дзеркальної призми, р - лінійний розмір пікселя. Положення центра другої експозиції задають відносно центра першої експозиції через інтервал (n + 0,5)р відносно осі У, а відносно осі X - таким чином, щоб центр другої експозиції опинився на одній лінії рядків пікселів (лінія поділу пікселів, паралельна осі Y) з центром першої експозиції. Цього добиваються зміщенням другого кадру у полі зору ЦЗК при повороті призми на кут (точка А2 на фіг. 2) після виконання першої експозиції на величину x1 (паралельно осі X ) обертанням оптичного дзеркала на п'єзоелектричних шайбах навколо осі Z, яка є перпендикулярною площині XY. У залежності від необхідної величини зміщення x1 та швидкостей переміщення зображення по осях X і Y (ці величини розраховуються блоком 7), на ПЕШ подається певне значення напруги з генератора, що призводить до зворотного п'єзоефекту: ПЕШ змінюються у своїх розмірах під дією напруги (в противофазі на діаметрально-протилежні елементи). При цьому, за допомогою подільника напруги отримують значення напруги, необхідне для кожної з п'єзоелектичних шайб окремо. Після виконання другої експозиції напруга з ПЕШ знімається і акустооптичний рефлектор займає вихідне положення. Центр третьої експозиції задають відносно точки, що відповідала би центру другої експозиції без зміщення кадру акустооптичним рефлектором (точка 2 на фіг. 3), через інтервал (n+0,5)р відносно осі У (таким чином, інтервал між фактичними центрами першої і третьої експозицій відносно осі У складає ціле число пікселів), а відносно осі X - зміщенням кадру в полі зору ЦЗК за допомогою акустооптичного рефлектора, поданням розрахованого значення напруги на ПЕШ, на інтервал х2 таким чином, щоб центр третьої експозиції був зміщений відносно фактичного центра другої експозиції (точка 2' на фіг. 3) вздовж осі X, а, отже, і центра першої експозиції, на величину х3 = (m + 0,5)р, де m - деяке ціле число. На лінії 1-2-3 на фіг. 3 знаходились би центри другої і третьої експозицій без зміщення кадрів акустооптичним рефлектором. Точки експозицій 1, 2’ і 3’ отримують у кожному з блоків кадрів. Таким чином, після виконання першого зміщення кадрів відносно один одного акустооптичним рефлектором вздовж осі X на дробовий інтервал маємо зміщення засвічування в пікселях кадрів (зсув зображення відносно пікселів матриці) вздовж осі Y на (n + 0,5)р, де n ціле число, а після другого зміщення кадрів - те ж на (n + 0,5)р вздовж осі У та на (m + 0,5)р, де m - ціле число. У результаті отримуємо субпікселі, зображені на фіг. 4. Зазначимо, що дробова частина, на яку виконують зміщення засвічування в пікселях кадрів вздовж осей X і Y, може бути і не 0,5р. При іншій величині дробового зміщення матимемо інше число експозицій для кожного блока кадрів. Інформація, що приймається від об'єкта, попередньо опрацьовується в блоці 7. Зауважимо, що в блок 7 з блока 2 надходять електричні сигнали від засвічування пікселів ПЗЗ-матриці - від кожного пікселя, в блоці 7 виконується ранжування і кодування цих сигналів. Цю опрацьовану інформацію спрямовують до блока дешифрування 19. В блоці 19 аналізують відповідно сигнали по кожному рядку і кожному стовпцю для n експозицій. Розглянемо порядок визначення субпікселів у рядку. При n зсувах отримують (n +1) субпікселів прямокутної форми. Припустимо, що n=1. На фіг. 5, а) показаний фрагмент рядка з 8 пікселів (№№ 1...8). Комп'ютер вирішує задачу: знайти групу рівносигнальних пікселів у рядку і вибирає групи суміжних рівносигнальних пікселів (не менше 2-х або 3-х). 3 UA 97889 C2 5 Виконується порівняння значень електричних сигналів від засвічування пікселів в рядку. На фіг. 5 показані рівні сигналів, що заповнюють кожний піксель штрихуванням. У даному випадку сигнали від пікселів 3, 4, 5 мають рівну величину сигналу, яку можна визначити по шкалі сірого тону. У наведеному прикладі прийняті наступні рівні сигналів від засвічування пікселів (у відсотках максимальних рівнів): 1-100 %, 2-75 %, 3-50 %, 4-50 %, 5-50 %, 6-25 %, 7-50 %, 8-75 %. Після виконання розгортки маємо зсув зображення на ПЗЗ-матриці на величину , де Р n 1 лінійний розмір квадратного пікселя. Наприклад при n=1 отримують сигнали від засвічування тих же пікселів, але тепер вже зсунутих у напрямку лінії рядків на величину . 2 10 Представимо рівні цих сигналів як заповнені штрихуванням квадрати 0’, 1’, 2’ ..., 7’ (фіг. 5, б) з приблизними значеннями рівнів відповідних двом суміжним пікселям у ряді 1,..., 8. Отримаємо у відсотках: 1’- 88 %; 2’ - 62 %; 3’ - 50 %; 4' - 50 %; 5’ - 38 %; 6' - 38 %; 7’ - 62 %. По даних сигналів в квадратах пікселів на фіг. 5, а), б) на фіг. 5, в) аналогічно можна сформувати рівні сигналів в прямокутниках з короткою стороною , позначені як 10', 11', 21', 2 15 20 25 30 35 40 45 50 22', 32', 33', 43', 44', 54', 55', 65', 66', 76', 77', 87', 88'. Звернемо увагу, що на фіг. 5, а) рівносигнальну границю утворюють сигнали в квадратах 3, 4, 5, на фіг. 5, б) - у квадратах 3', 4' і на фіг. 5, в) - у прямокутниках 33', 43', 44', 54', кожний з яких дорівнює 50 % максимального рівня. Треба відзначити, що в рівносигнальній групі 33', 43', 44', 54' отримані значення і еквівалентність рівнів сигналів є більш точними і достовірними у порівнянні з іншими "напівпікселями" ряду. При цьому, чим більше є пікселів в рівносигнальних границях (у рядку, стовпці) і більше таких границь, тим точніше результати визначення рівнів сигналів від усіх "напівпікселів". Після цього, базуючись на рівносигнальну групу 33', 43', 44', 54' визначають в блоці 19 рівні сигналів у всіх прямокутниках рядка (тобто у відповідних "напівпікселях"). При цьому контролюють отримані значення по інших рівносигнальних групах у даному рядку і при необхідності виконують обчислювальне зрівнювання сигналів. Позначимо рівні електричних сигналів від пікселів Ui і Ui • ( i 1; 8, i' 0' ; 8' ), а від "напівпікселів" - Uii: Є очевидним, що (фіг. 5): U3+U3’,=U32’+2U33’+U43’. (1) Враховуючи, що U33’ =U43', отримаємо: U32’ =U3+U3’-3U33, = U3-0,5U3’, (2) оскільки U33’ = 0,5U3’. Аналогічно: U22’ = U2+U3’-2U32’- U33 ’= U2+U1-2(U3-0,5U3’)-0,5U3’ = U2 -U3 +U3’, (3) Так само визначають U21’, U11’, U10’ - і U55’,..., U88’. У зв'язку з коливаннями висоти знімання, крену, тангажу, та рисканням, відхиленням курсу через різні явища в атмосфері швидкість літального апарата може змінюватись, що буде викликати зміни в розмірах субпікселів і, відповідно, зміни у значеннях швидкостей переміщення зображення вздовж осей X і Y, а тому в цьому випадку блок оброки інформації через блок керування і механізм обертання призми регулює кутову швидкість обертання дзеркальної призми таким чином, щоб відношення швидкостей руху світлових променів по осях X і У було постійним. На фіг. 3 зображено приклад одного блока кадрів А, який є першим блоком у групі знімків, з числом експозицій n = 3 у блоці. Центри цих експозицій - А1.1, А1.2 та А1.3. Лінійний інтервал між центрами експозицій відносно осей координат: X та Y. Величини цих лінійних інтервалів зумовлює розміри субпікселів. Блок оброки інформації 7 приймає також інформацію від датчика вертикалі 12 та GPSприймача 13. Однією з важливих задач блока оброки інформації 7 є синхронізація частот обертання призми 5, частоти кутового зміщення дзеркала 3 на п'єзошайбах 4 та визначення моментів експозицій, які повинні відповідати інтервалам кадрової розгортки, що здійснюється обертанням призми 5, а також моментам напрямку та швидкості руху зображення на фотоприймачі 2 за рахунок кутового повороту дзеркала 3, що створює антизмазування. Крім самого пристрою, що фотографує, встановлюються GPS приймач - для визначення точного місцеположення центра кожного знімка, таймер - для визначення часу, коли проводиться опитування матриці, і для синхронізації системи, блок попередньої обробки 4 UA 97889 C2 5 10 15 20 25 зображення, навігаційний блок, блок керування, блок запису і збереження інформації, система відображення й монітор. Значною перевагою даного способу є можливість одержання великої кількості субпікселів шляхом задання числа експозицій (що може бути обмежене лише фізичними можливостями системи) і, як наслідок, значне підвищення розрізненості знімальної системи. Таким чином, запропонований спосіб цифрового аерокосмічного знімання місцевості дозволяє підвищити рентабельність виконання аерокосмічного знімання з підвищенням його розрізненості за рахунок отримання субпікселів і збільшення кута поля зору знімальної системи. Література 1. Савиных В.П. Геоинформационный анализ данных дистанционного зондирования/ В.П. Савиных, В.Я. Цветков. - М.: Картгеоцентр-Геодезиздат, 2001.-228 с: ил. 2. LH System ADS 40, XIXISPRS Congress Amsterdam, July, 2000. 3. Дорожинський О.Л. Фотограмметрія: Підручник/ О.Л.Дорожинський, Р.Тукай. - Львів: Видавництво Національного університету «Львівська політехніка», 2008. - 332 с. 4. Патент на винахід № 79505, Україна, G02B13/08, GO3B37/00 / Бурачек В.Г., Железняк О.О., Крельштейн П.Д., Надточій О.В., Шульц Р.В. Спосіб цифрового аерофотознімання. - Від 25.06.2007, бюл. № 9,2007 р. 5. Shiba H. Image registration method, image registration apparatus and recording medium / United States Patent No 6,434,279. - August 13, 2002. 6. Jackson W.B., Jared D.A., Basu S., Biegelsen D.K. Position sensitive detector based image conversion system capable of preserving subpixel information / United States Patent No 5,754,690.May 19, 1998. 7. Mendlovic D., Zalevsky Z., Konforti N., Marom E., Shabtay G., Levy U., Karako S. Superresolving imaging system / United States Patent No 6,344,893. - February 5, 2002. 8. Waslowski K., Merettig G. Opto-electronic device and method for its operation / European Patent No 1 821 120.-16.02.2007. 9. Якушенков Ю.Г. Теория и расчѐт оптико-электронных приборов: Учебник для студентов приборостроительных специальностей вузов / Якушенков Ю.Г. - 3-е изд., перераб. и доп. - М.: Машиностроение, 1989. - 360 с: ил. 30 ФОРМУЛА ВИНАХОДУ 35 40 Спосіб цифрового аерокосмічного знімання, заснований на субпіксельній технології, що полягає у зйомці місцевості цифровою фотознімальною камерою з блоком сканування з літального апарата з наступною комп'ютерною обробкою матеріалів, який відрізняється тим, що при покадровому скануванні місцевості у групі кадрів для кожного блока кадрів виконують "n" експозицій з інтервалом, який містить дробову частину проекції пікселя фотоприймальної матриці знімальної камери на місцевість, при цьому контролюють швидкість переміщення зображення місцевості на фотоприймальній матриці і за цим параметром регулюють швидкість сканування по осі, перпендикулярній до напрямку поздовжньої осі літального апарата, і задають точки експозицій та інтервали між цими точками. 5 UA 97889 C2 6 UA 97889 C2 7 UA 97889 C2 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for digital aerospace survey
Автори англійськоюBelenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Zatserkovnyi Vitalii Ivanovych, Nystoriak Ivan Oleksandrovych
Назва патенту російськоюСпособ цифровой аэрокосмической съемки
Автори російськоюБеленок Вадим Юрьевич, Бурачек Всеволод Германович, Зацерковный Виталий Иванович, Нисторяк Иван Александрович
МПК / Мітки
МПК: G01C 11/06
Мітки: цифрового, спосіб, аерокосмічного, знімання
Код посилання
<a href="https://ua.patents.su/10-97889-sposib-cifrovogo-aerokosmichnogo-znimannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб цифрового аерокосмічного знімання</a>
Спосіб аерокосмічного знімання лінійних об’єктів
Номер патенту: 97888
Опубліковано: 26.03.2012
Автори: Нисторяк Іван Олександрович, Станкевич Сергій Арсенійович, Беленок Вадим Юрійович, Бурачек Всеволод Германович, Зацерковний Віталій Іванович, Попов Михайло Олексійович
МПК: G01C 11/02
Мітки: аерокосмічного, лінійних, спосіб, знімання, об'єктів
Формула / Реферат:
Спосіб аерокосмічного знімання лінійних об'єктів, заснований на субпіксельній технології, який відрізняється тим, що фотоприймальну матрицю оптико-електронного знімального приладу повертають навколо оптичної осі приладу, при цьому вимірюють величину кута повороту, а при формуванні цифрового плану за величиною електричних сигналів від засвічування пікселів вздовж границь лінійного об'єкта визначають точні межі та ширину об'єкта і враховують...
Спосіб одержання додаткових зональних зображень багатозонального цифрового аерокосмічного знімка
Номер патенту: 75299
Опубліковано: 15.03.2006
Автори: Попов Михайло Олексійович, Мосов Сергій Петрович, Станкевич Сергій Арсенійович, Волошин В'ячеслав Іванович
Мітки: зональних, спосіб, багатозонального, додаткових, одержання, знімка, зображень, цифрового, аерокосмічного
Формула / Реферат:
Спосіб одержання додаткових зональних зображень багатозонального цифрового аерокосмічного знімка, при якому одержують функції спектральної чутливості першого та другого із існуючих зональних каналів багатозонального цифрового аерокосмічного знімка, визначають значення сигналів пікселів у кожному зональному каналі багатозонального цифрового зображення, застосовують вказане значення до кожного піксела кожного зонального каналу, який...
Спосіб комплексного підвищення якості цифрового багатоспектрального аерокосмічного знімка
Номер патенту: 96725
Опубліковано: 25.11.2011
Автори: Гунько Юрій Іванович, Попов Михайло Олексійович, Топольницький Максим Валентинович, Вишневий Сергій Валерійович, Жук Сергій Якович, Пилипчук Валентин Володимирович
Мітки: спосіб, якості, підвищення, цифрового, комплексного, знімка, аерокосмічного, багатоспектрального
Формула / Реферат:
Спосіб комплексного підвищення якості цифрового багатоспектрального аерокосмічного знімка, у складі якого панхроматичне зображення високої просторової якості і сукупність з N оригінальних зональних зображень більш низької просторової якості, за яким для підвищення якості зональних зображень піксельна розмірність кожного із зональних зображень проводиться шляхом ресемплінгу до піксельної розмірності панхроматичного зображення, при цьому за...
Спосіб відображення багатозонального цифрового аерокосмічного знімка на кольоровому дисплеї
Номер патенту: 90989
Опубліковано: 10.06.2010
Автори: Мосов Сергій Петрович, Кондратов Олександр Михайлович, Станкевич Сергій Арсенійович, Попов Михайло Олексійович, Андронов Віталій Віталійович, Титаренко Ольга Вікторовна
МПК: G06K 9/00
Мітки: відображення, знімка, дисплеї, цифрового, аерокосмічного, кольоровому, багатозонального, спосіб
Формула / Реферат:
Спосіб відображення багатозонального цифрового аерокосмічного знімка на кольоровому дисплеї, при якому одержують багатозональний цифровий аерокосмічний знімок, отримують спектральний колориметричний опис кожного колоранта дисплея, задають початкове наближення набору коефіцієнтів складу колорантів дисплея, де кожний коефіцієнт визначає частку відповідного колоранта в наборі колорантів, розраховують різницю інтенсивності зображень об'єкта і...
Спосіб відображення багатозонального цифрового аерокосмічного знімка на кольоровому дисплеї
Номер патенту: 75298
Опубліковано: 15.03.2006
Автори: Волошин В'ячеслав Іванович, Попов Михайло Олексійович, Мосов Сергій Петрович, Станкевич Сергій Арсенійович
Мітки: відображення, багатозонального, цифрового, спосіб, кольоровому, дисплеї, аерокосмічного, знімка
Формула / Реферат:
Спосіб відображення багатозонального цифрового аерокосмічного знімка на кольоровому дисплеї, при якому одержують багатозональний цифровий аерокосмічний знімок, отримують спектральний колориметричний опис кожного колоранта дисплея, задають початкове наближення набору коефіцієнтів складу колорантів дисплея, де кожний коефіцієнт визначає частку відповідного колоранта в наборі колорантів, обчислюють різницю між отриманими кольорами об'єкта і...
Попередній патент: Спосіб аерокосмічного знімання лінійних об’єктів
Наступний патент: Спосіб одержання карбідів металів перехідної групи
Випадковий патент: Композиція, яка фотополімерізується