Спосіб аерокосмічного знімання лінійних об’єктів
Номер патенту: 97888
Опубліковано: 26.03.2012
Автори: Станкевич Сергій Арсенійович, Беленок Вадим Юрійович, Зацерковний Віталій Іванович, Нисторяк Іван Олександрович, Бурачек Всеволод Германович, Попов Михайло Олексійович
Формула / Реферат
Спосіб аерокосмічного знімання лінійних об'єктів, заснований на субпіксельній технології, який відрізняється тим, що фотоприймальну матрицю оптико-електронного знімального приладу повертають навколо оптичної осі приладу, при цьому вимірюють величину кута повороту, а при формуванні цифрового плану за величиною електричних сигналів від засвічування пікселів вздовж границь лінійного об'єкта визначають точні межі та ширину об'єкта і враховують виміряний кут повороту для переходу до системи координат осей носія.
Текст
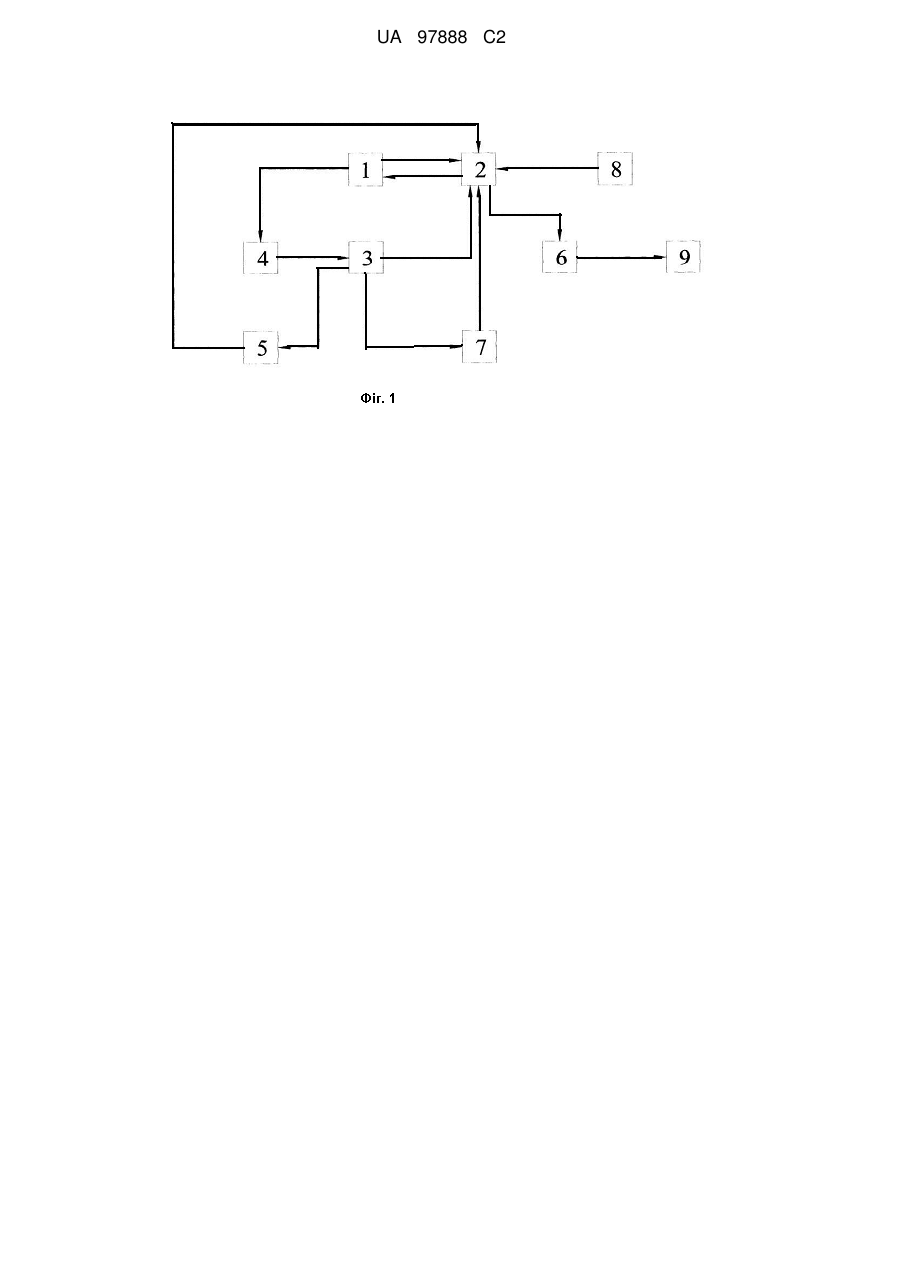
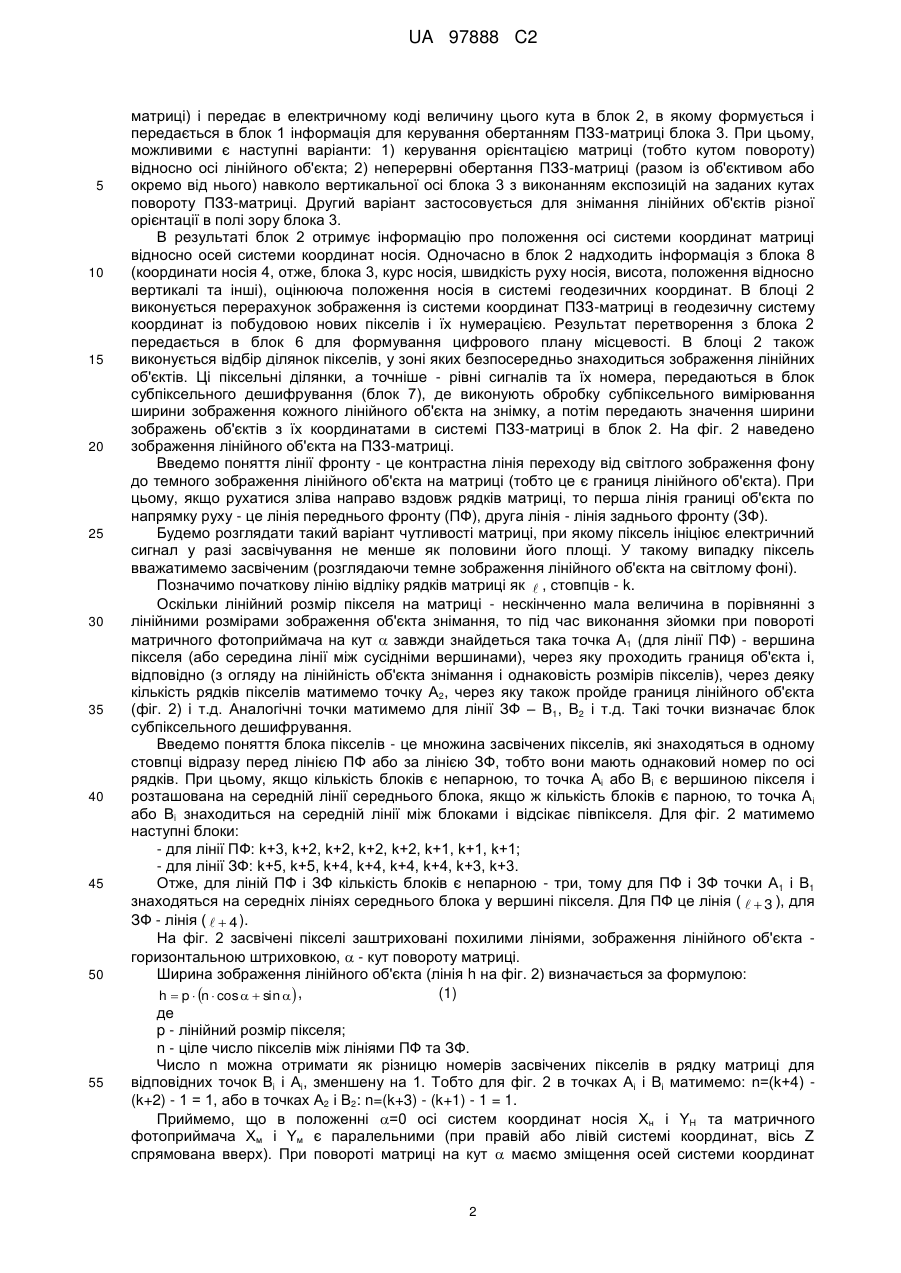
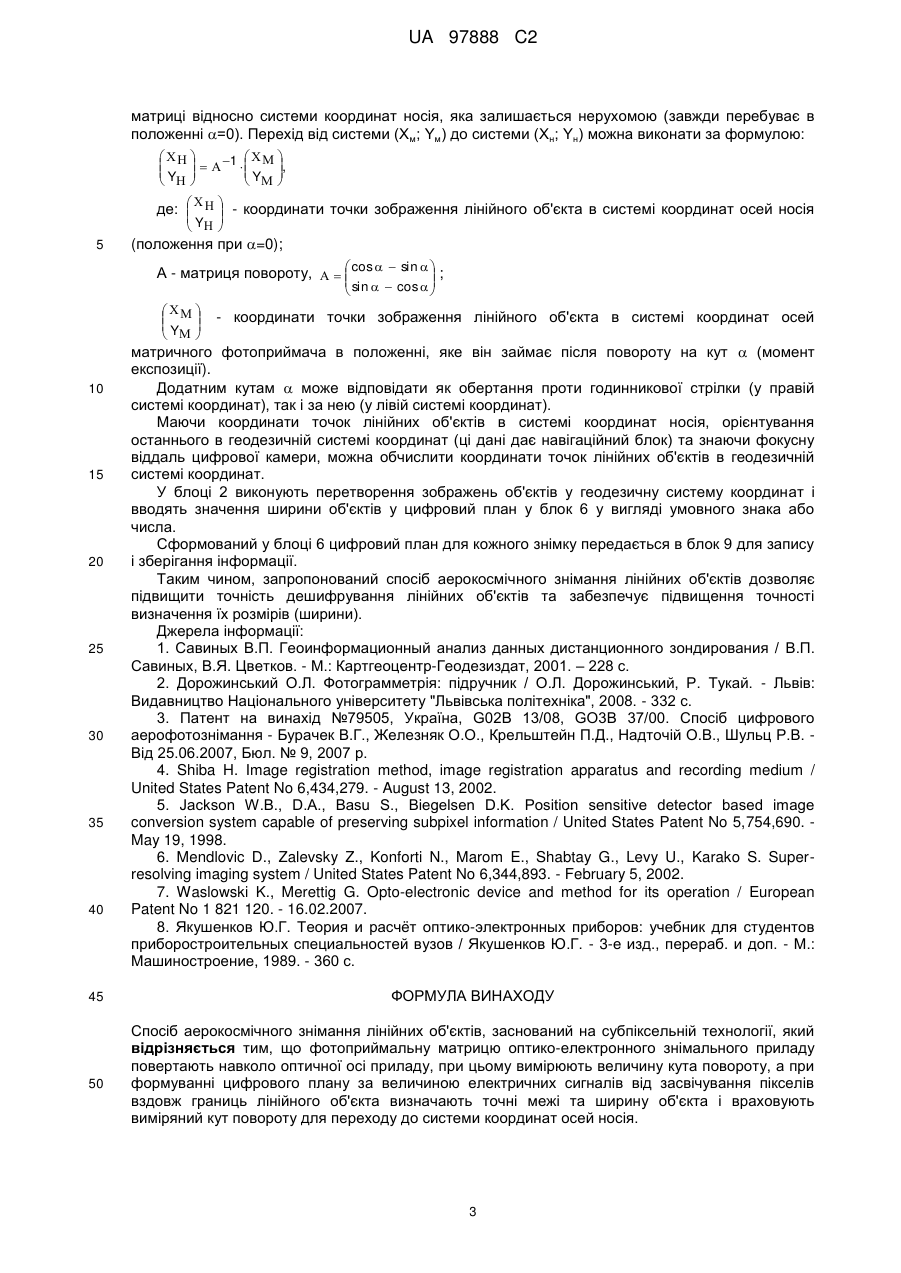
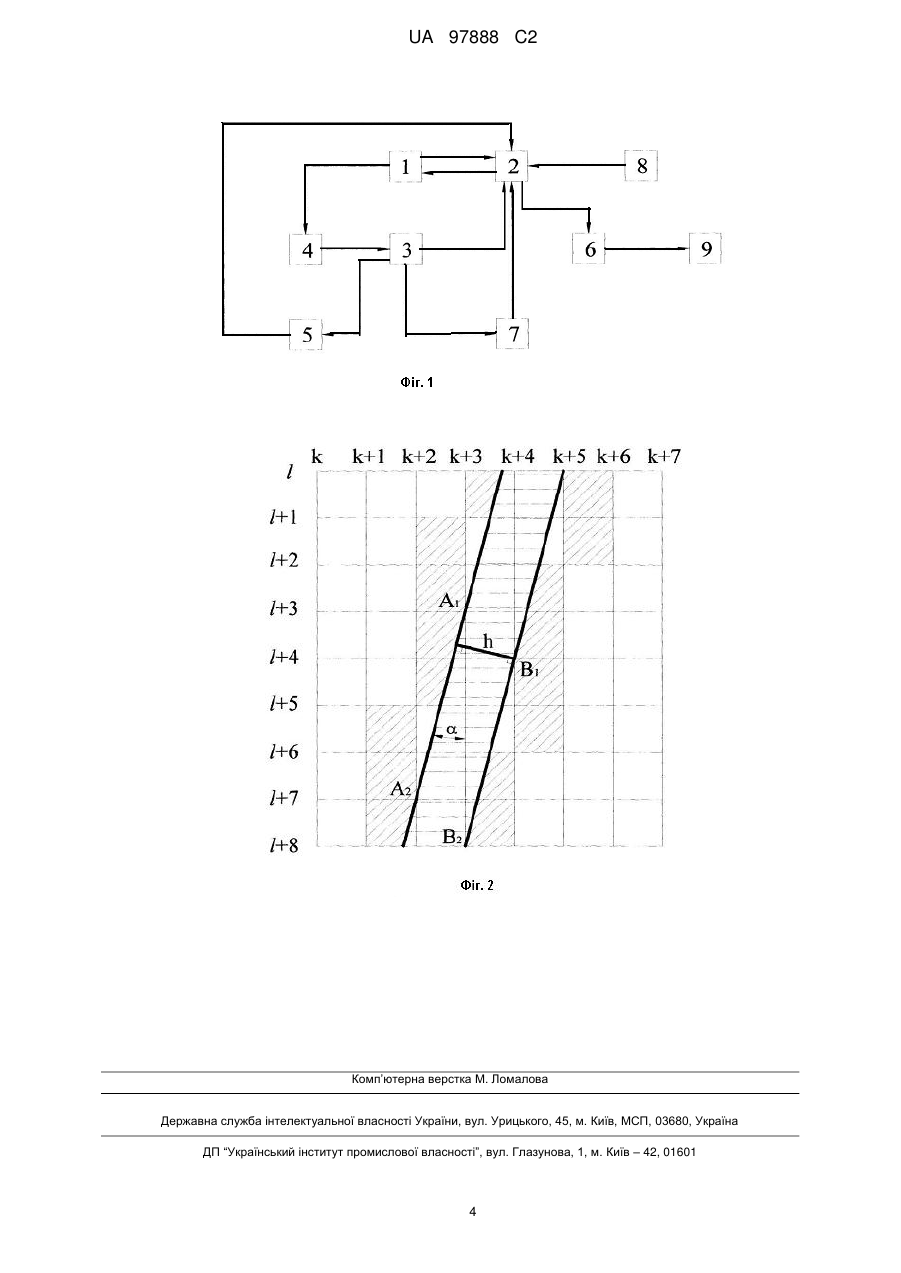
Реферат: Винахід належить до аерокосмічних знімань та дешифрування. Спосіб аерокосмічного знімання лінійних об'єктів заснований на субпіксельній технології. При цьому фотоприймальну матрицю оптико-електронного знімального приладу повертають навколо оптичної осі приладу і вимірюють величину кута повороту, а при формуванні цифрового плану за величиною електричних сигналів від засвічування пікселів вздовж границь лінійного об'єкта визначають точні межі та ширину об'єкта і враховують виміряний кут повороту для переходу до системи координат осей носія. Винахід дозволяє підвищити точність дешифрування лінійних об'єктів та забезпечує підвищення точності визначення їх розмірів (ширини). UA 97888 C2 (12) UA 97888 C2 UA 97888 C2 5 10 15 20 25 30 35 40 45 50 55 60 Спосіб аерокосмічного знімання лінійних об'єктів належить до галузі аерокосмічних знімань та дешифрування. Відомий ряд способів цифрового аерофотознімання: 1) способи сканування місцевості з космосу цифровими знімальними системами [1]; 2) сканерний спосіб цифрового аерофотознімання з літака системою ADS40; 3) спосіб покадрового знімання місцевості цифровою камерою [2]; 4) спосіб цифрового аерофотознімання з покадровим скануванням місцевості [3]. Загальним недоліком цих способів є низька розрізненість, для збільшення якої застосовуються різноманітні способи одержання зображень субпіксельної розрізненості. Відомий спосіб та пристрій для реєстрації зображень [4], в якому забезпечується субпіксельна реєстрація країв на зображенні шляхом врахування відхилень розподілу яскравості від унімодального. Недоліком цього способу є відсутність фізичного вимірювання субпіксельних сигналів, тобто він є різновидом інтерполяції. Відомий спосіб, що реалізується пристроєм для одержання зображень з реєстрацією субпіксельної інформації [5], в якому визначаються інтенсивності сигналів та центроїди місцерозташування сигналів в межах кожного пікселя. Недоліком цього пристрою є висока складність конструкції. Відомий спосіб, що реалізується пристроєм для одержання зображень із надрозрізненістю [6], в якому субпіксельний сигнал формується за допомогою додаткових дифракційних елементів з мікролінзами в кожному пікселі. Недоліком цього пристрою також є висока складність конструкції. Найбільш близьким технічним рішенням, вибраним як прототип, є оптико-електронний пристрій та спосіб його функціонування, в якому здійснюється субпіксельний зсув зображення за рахунок додаткової оптичної системи [7]. Спільними ознаками для прототипу і заявленого способу є виконання покадрового знімання та застосування багатоелементної фотоприймальної матриці як приймача випромінювання. Недоліком відомого способу-прототипу є обмеження кількості розрізнювальних субпікселів кількістю додаткових оптичних систем, що унеможливлює значне підвищення розрізнювальної здатності знімальної системи. Задачею винаходу є створення способу аерокосмічного знімання лінійних об'єктів, що, шляхом усунення недоліків аналогу та прототипу, забезпечує підвищення точності дешифрування лінійних об'єктів та забезпечує високу точність визначення їх розмірів. Поставлена задача вирішується за рахунок створення способу аерокосмічного знімання лінійних об'єктів, заснованого на субпіксельній технології, який відрізняється тим, що фотоприймальну матрицю оптико-електронного знімального приладу повертають навколо оптичної осі приладу, при цьому вимірюють величину кута повороту, а при формуванні цифрового плану за величиною електричних сигналів від засвічування пікселів вздовж границь лінійного об'єкта визначають точні межі та ширину об'єкта і враховують виміряний кут повороту для переходу до системи координат осей носія. Технічним результатом є підвищення точності дешифрування лінійних об'єктів, підвищення точності визначення їх розмірів (ширини). На фіг. 1 представлена схема пристрою, за допомогою якого реалізується запропонований спосіб, на якій відповідними цифрами позначено: 1 - блок керування; 2 - блок обробки інформації; 3 - цифрова камера; 4 - блок приводу матриці; 5 - датчик кутів повороту; 6 - блок формування цифрового плану; 7 - блок субпіксельного дешифрування; 8 - навігаційний блок; 9 - блок запису та зберігання інформації. Стандартний навігаційний блок містить гіроазимут, гірогоризонт, датчики вертикалі, висоти, швидкості, приймач GPS та інші навігаційні прилади. Електричні блоки 1, 2, 6, 7, 9 розташовуються борту носія (наприклад, літака). Цифрова камера встановлюється на жорсткій основі, наприклад, на гіростабілізуючій платформі. Також може бути встановлений радіоканал для передачі результатів знімання. Привід (блок 4) закріплюють на основі цифрової камери - він обертає матрицю на заданий блоком керування кут. Робота пристрою по запропонованому способу полягає в наступному. Блок 1 включає інші блоки, формує сигнал повороту цифрової камери (блок 3) і передає його в блок 4 та в блок 2, блок 4 забезпечує обертання фотоприймальної матриці (пристрою з зарядовим зв'язком - ПЗЗ 1 UA 97888 C2 5 10 15 20 25 30 35 40 45 50 55 матриці) і передає в електричному коді величину цього кута в блок 2, в якому формується і передається в блок 1 інформація для керування обертанням ПЗЗ-матриці блока 3. При цьому, можливими є наступні варіанти: 1) керування орієнтацією матриці (тобто кутом повороту) відносно осі лінійного об'єкта; 2) неперервні обертання ПЗЗ-матриці (разом із об'єктивом або окремо від нього) навколо вертикальної осі блока 3 з виконанням експозицій на заданих кутах повороту ПЗЗ-матриці. Другий варіант застосовується для знімання лінійних об'єктів різної орієнтації в полі зору блока 3. В результаті блок 2 отримує інформацію про положення осі системи координат матриці відносно осей системи координат носія. Одночасно в блок 2 надходить інформація з блока 8 (координати носія 4, отже, блока 3, курс носія, швидкість руху носія, висота, положення відносно вертикалі та інші), оцінююча положення носія в системі геодезичних координат. В блоці 2 виконується перерахунок зображення із системи координат ПЗЗ-матриці в геодезичну систему координат із побудовою нових пікселів і їх нумерацією. Результат перетворення з блока 2 передається в блок 6 для формування цифрового плану місцевості. В блоці 2 також виконується відбір ділянок пікселів, у зоні яких безпосередньо знаходиться зображення лінійних об'єктів. Ці піксельні ділянки, а точніше - рівні сигналів та їх номера, передаються в блок субпіксельного дешифрування (блок 7), де виконують обробку субпіксельного вимірювання ширини зображення кожного лінійного об'єкта на знімку, а потім передають значення ширини зображень об'єктів з їх координатами в системі ПЗЗ-матриці в блок 2. На фіг. 2 наведено зображення лінійного об'єкта на ПЗЗ-матриці. Введемо поняття лінії фронту - це контрастна лінія переходу від світлого зображення фону до темного зображення лінійного об'єкта на матриці (тобто це є границя лінійного об'єкта). При цьому, якщо рухатися зліва направо вздовж рядків матриці, то перша лінія границі об'єкта по напрямку руху - це лінія переднього фронту (ПФ), друга лінія - лінія заднього фронту (ЗФ). Будемо розглядати такий варіант чутливості матриці, при якому піксель ініціює електричний сигнал у разі засвічування не менше як половини його площі. У такому випадку піксель вважатимемо засвіченим (розглядаючи темне зображення лінійного об'єкта на світлому фоні). Позначимо початкову лінію відліку рядків матриці як , стовпців - k. Оскільки лінійний розмір пікселя на матриці - нескінченно мала величина в порівнянні з лінійними розмірами зображення об'єкта знімання, то під час виконання зйомки при повороті матричного фотоприймача на кут завжди знайдеться така точка А1 (для лінії ПФ) - вершина пікселя (або середина лінії між сусідніми вершинами), через яку проходить границя об'єкта і, відповідно (з огляду на лінійність об'єкта знімання і однаковість розмірів пікселів), через деяку кількість рядків пікселів матимемо точку А2, через яку також пройде границя лінійного об'єкта (фіг. 2) і т.д. Аналогічні точки матимемо для лінії ЗФ – В1, В2 і т.д. Такі точки визначає блок субпіксельного дешифрування. Введемо поняття блока пікселів - це множина засвічених пікселів, які знаходяться в одному стовпці відразу перед лінією ПФ або за лінією ЗФ, тобто вони мають однаковий номер по осі рядків. При цьому, якщо кількість блоків є непарною, то точка Аi або Вi є вершиною пікселя і розташована на середній лінії середнього блока, якщо ж кількість блоків є парною, то точка А i або Bi знаходиться на середній лінії між блоками і відсікає півпікселя. Для фіг. 2 матимемо наступні блоки: - для лінії ПФ: k+3, k+2, k+2, k+2, k+2, k+1, k+1, k+1; - для лінії ЗФ: k+5, k+5, k+4, k+4, k+4, k+4, k+3, k+3. Отже, для ліній ПФ і ЗФ кількість блоків є непарною - три, тому для ПФ і ЗФ точки Α1 і В1 знаходяться на середніх лініях середнього блока у вершині пікселя. Для ПФ це лінія ( 3 ), для ЗФ - лінія ( 4 ). На фіг. 2 засвічені пікселі заштриховані похилими лініями, зображення лінійного об'єкта горизонтальною штриховкою, - кут повороту матриці. Ширина зображення лінійного об'єкта (лінія h на фіг. 2) визначається за формулою: (1) h p n cos sin , де p - лінійний розмір пікселя; n - ціле число пікселів між лініями ПФ та ЗФ. Число n можна отримати як різницю номерів засвічених пікселів в рядку матриці для відповідних точок Вi і Ai, зменшену на 1. Тобто для фіг. 2 в точках Аі і Ві матимемо: n=(k+4) (k+2) - 1 = 1, або в точках А2 і В2: n=(k+3) - (k+1) - 1 = 1. Приймемо, що в положенні =0 осі систем координат носія Хн і YH та матричного фотоприймача Хм і Yм є паралельними (при правій або лівій системі координат, вісь Ζ спрямована вверх). При повороті матриці на кут маємо зміщення осей системи координат 2 UA 97888 C2 матриці відносно системи координат носія, яка залишається нерухомою (завжди перебуває в положенні =0). Перехід від системи (Хм; Υм) до системи (Хн; Υн) можна виконати за формулою: 1 Y Y , де: - координати точки зображення лінійного об'єкта в системі координат осей носія Y 5 (положення при =0); А - матриця повороту, cos sin ; sin cos Y 10 15 20 25 30 35 40 45 50 - координати точки зображення лінійного об'єкта в системі координат осей матричного фотоприймача в положенні, яке він займає після повороту на кут (момент експозиції). Додатним кутам може відповідати як обертання проти годинникової стрілки (у правій системі координат), так і за нею (у лівій системі координат). Маючи координати точок лінійних об'єктів в системі координат носія, орієнтування останнього в геодезичній системі координат (ці дані дає навігаційний блок) та знаючи фокусну віддаль цифрової камери, можна обчислити координати точок лінійних об'єктів в геодезичній системі координат. У блоці 2 виконують перетворення зображень об'єктів у геодезичну систему координат і вводять значення ширини об'єктів у цифровий план у блок 6 у вигляді умовного знака або числа. Сформований у блоці 6 цифровий план для кожного знімку передається в блок 9 для запису і зберігання інформації. Таким чином, запропонований спосіб аерокосмічного знімання лінійних об'єктів дозволяє підвищити точність дешифрування лінійних об'єктів та забезпечує підвищення точності визначення їх розмірів (ширини). Джерела інформації: 1. Савиных В.П. Геоинформационный анализ данных дистанционного зондирования / В.П. Савиных, В.Я. Цветков. - М.: Картгеоцентр-Геодезиздат, 2001. – 228 с. 2. Дорожинський О.Л. Фотограмметрія: підручник / О.Л. Дорожинський, Р. Тукай. - Львів: Видавництво Національного університету "Львівська політехніка", 2008. - 332 с. 3. Патент на винахід №79505, Україна, G02B 13/08, GO3B 37/00. Спосіб цифрового аерофотознімання - Бурачек В.Г., Железняк О.О., Крельштейн П.Д., Надточій О.В., Шульц Р.В. Від 25.06.2007, Бюл. № 9, 2007 р. 4. Shiba H. Image registration method, image registration apparatus and recording medium / United States Patent No 6,434,279. - August 13, 2002. 5. Jackson W.В., D.Α., Basu S., Biegelsen D.K. Position sensitive detector based image conversion system capable of preserving subpixel information / United States Patent No 5,754,690. May 19, 1998. 6. Mendlovic D., Zalevsky Z., Konforti N., Marom E., Shabtay G., Levy U., Karako S. Superresolving imaging system / United States Patent No 6,344,893. - February 5, 2002. 7. Waslowski K., Merettig G. Opto-electronic device and method for its operation / European Patent No 1 821 120. - 16.02.2007. 8. Якушенков Ю.Г. Теория и расчѐт оптико-электронных приборов: учебник для студентов приборостроительных специальностей вузов / Якушенков Ю.Г. - 3-е изд., перераб. и доп. - М.: Машиностроение, 1989. - 360 с. ФОРМУЛА ВИНАХОДУ Спосіб аерокосмічного знімання лінійних об'єктів, заснований на субпіксельній технології, який відрізняється тим, що фотоприймальну матрицю оптико-електронного знімального приладу повертають навколо оптичної осі приладу, при цьому вимірюють величину кута повороту, а при формуванні цифрового плану за величиною електричних сигналів від засвічування пікселів вздовж границь лінійного об'єкта визначають точні межі та ширину об'єкта і враховують виміряний кут повороту для переходу до системи координат осей носія. 3 UA 97888 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for gps survay of linear objects
Автори англійськоюBelenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Zatserkovnyi Vitalii Ivanovych, Nystoriak Ivan Oleksandrovych, Popov Mykhailo Oleksiiovych, Stankevych Serhii Arseniiovych
Назва патенту російськоюСпособ аэрокосмической съемки линейных объектов
Автори російськоюБеленок Вадим Юрьевич, Бурачек Всеволод Германович, Зацерковный Виталий Иванович, Нисторяк Иван Александрович, Попов Михаил Алексеевич, Станкевич Сергей Арсениевич
МПК / Мітки
МПК: G01C 11/02
Мітки: аерокосмічного, знімання, об'єктів, спосіб, лінійних
Код посилання
<a href="https://ua.patents.su/6-97888-sposib-aerokosmichnogo-znimannya-linijjnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб аерокосмічного знімання лінійних об’єктів</a>
Спосіб аерофотознімання лінійних мереж
Номер патенту: 75886
Опубліковано: 15.06.2006
Автори: Бурачек Всеволод Германович, Суковенко Оксана Володимирівна, Крельштейн Петро Давидович, Катушков Володимир Олексійович
МПК: G01C 11/00
Мітки: лінійних, мереж, спосіб, аерофотознімання
Формула / Реферат:
Спосіб аерофотознімання лінійних мереж, що заснований на орієнтуванні носія та аерофотозніманні смугових ділянок, який відрізняється тим, що навігаційне орієнтування носія аерофотокамери виконують по траєкторії, яка повторює трасу наземної мережі ділянок, а аерофотознімання ведеться плановими знімками з використанням малих радіусів нерозривно-смуговою зйомкою послідовно з однієї ділянки на іншу, при цьому радіуси поворотів носія мають...
Спосіб задання координат області спостереження при плануванні космічного знімання
Номер патенту: 66361
Опубліковано: 26.12.2011
Автори: Фриз Сергій Петрович, Гуменюк Володимир Олександрович, Петрожалко Володимир Володимирович
МПК: B64G 4/00, G01C 11/00
Мітки: космічного, знімання, задання, координат, області, спосіб, плануванні, спостереження
Формула / Реферат:
Спосіб задання координат області спостереження при плануванні космічного знімання, при якому отримують завдання на проведення космічного знімання визначеної області земної поверхні, визначають область спостереження на карті, апроксимують область спостереження багатокутником за допомогою засобів креслень, визначають географічні координати вершин багатокутника, заносять визначені координати до заявки на проведення космічного знімання, який...
Спосіб дистанційного знімання місцевості
Номер патенту: 49406
Опубліковано: 26.04.2010
Автори: Мороз Валерій Миколайович, Параніч Віктор Петрович, Беленок Вадим Юрійович, Бурачек Всеволод Германович, Зацерковний Віталій Іванович
МПК: G01C 11/00
Мітки: дистанційного, місцевості, знімання, спосіб
Формула / Реферат:
Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, при цьому лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямку з...
Спосіб стереофотограмметричного знімання місцевості
Номер патенту: 64169
Опубліковано: 25.10.2011
Автори: Караулов Дмитро Олександрович, Бурачек Всеволод Германович, Дерун Ірина Юріївна, Беленок Вадим Юрійович, Зацерковний Віталій Іванович
МПК: G01C 11/00
Мітки: спосіб, знімання, місцевості, стереофотограмметричного
Формула / Реферат:
Спосіб стереофотограмметричного знімання місцевості, заснований на використанні цифрової оптичної камери, GPS-приймача та комп'ютерної обробки даних, який відрізняється тим, що при кожній експозиції з заданою точністю визначають кути відхилення оптичної осі цифрової знімальної камери відносно вертикалі в двох взаємно перпендикулярних площинах (ZOX) та (ZOY), які відповідають осям фотоприймальної матриці, виконують класифікацію об'єктів, що...
Спосіб стереофотограмметричного знімання місцевості
Номер патенту: 97338
Опубліковано: 25.01.2012
Автори: Бурачек Всеволод Германович, Дерун Ірина Юріївна, Беленок Вадим Юрійович, Караулов Дмитро Олександрович, Зацерковний Віталій Іванович
МПК: G01C 11/00
Мітки: знімання, місцевості, спосіб, стереофотограмметричного
Формула / Реферат:
Спосіб стереофотограмметричного знімання місцевості, заснований на використанні цифрової оптичної камери, GPS-приймача та комп'ютерної обробки даних, який відрізняється тим, що при кожній експозиції з заданою точністю визначають кути відхилення оптичної осі цифрової знімальної камери відносно вертикалі в двох взаємно перпендикулярних площинах (ZOX) та (ZOY), які відповідають осям фотоприймальної матриці, виконують класифікацію об'єктів, що...
Попередній патент: Біодеградуюча медична плівка
Наступний патент: Спосіб цифрового аерокосмічного знімання
Випадковий патент: Профіль перфорований для швидкозбірних конструкцій