Пристрій для одержання механічної роботи від джерела нетеплової енергії
Номер патенту: 102562
Опубліковано: 25.07.2013
Автори: Дубинський Ігор Миколайович, Дубінскій Андрєй Ігорєвіч
Формула / Реферат
1. Пристрій для одержання механічної роботи від джерела нетеплової енергії, що містить корпус з розташованим усередині нього робочим механізмом, систему напуску і вакуумного відкачування робочого середовища, та виконавчий механізм, що містить рухомий елемент і перетворює нетеплову енергію робочого середовища у корисну роботу, при цьому робочий механізм включає робочу камеру зі змінюваним об'ємом, поєднану через впускні і випускні клапани з системами напуску і вакуумного відкачування робочого середовища, частина поверхні якої виконана рухомою, з можливістю її зворотно-поступального руху під дією тиску робочого середовища, та жорстко з'єднана зі штоком, кінематично сполученим з рухомим елементом виконавчого механізму, який відрізняється тим, що пристрій додатково містить вакуумну камеру декомпенсації з вакуумним насосом, а його робочий механізм містить додаткову аналогічну робочу камеру зі змінюваним об'ємом, співвісну першій робочій камері, при цьому рухомі частини поверхні обох робочих камер опозитно розташовані всередині вакуумної камери декомпенсації, а їх рухомі торцеві поверхні жорстко сполучені між собою єдиним штоком з можливістю синхронного зворотно-поступального руху з постійним зусиллям на шток, робочий кінець якої герметично виведений за межі корпусу вакуумної камери декомпенсації і приєднаний до рухомого робочого елемента виконавчого механізму пристрою.
2. Пристрій за п. 1, який відрізняється тим. що рухомі частини поверхні кожної робочої камери виконані у вигляді сильфона із замкненим робочим торцем, що герметично стикається з нерухомою частиною поверхні робочої камери, або у вигляді порожнистого циліндра із замкненим робочим торцем, що герметично стикається з нерухомою частиною поверхні робочої камери з можливістю ковзного зворотно-поступального руху відносно неї, або у вигляді гнучкої мембрани, що герметично стикається з нерухомою частиною поверхні робочої камери.
3. Пристрій за п. 1 або 2, який відрізняється чим, що як виконавчий механізм використаний лінійний генератор електричного струму або кривошипно-шатунний механізм, обертовий момент колінвала якого перетворюється у подальшому в електричну енергію або у механічну роботу.
Текст
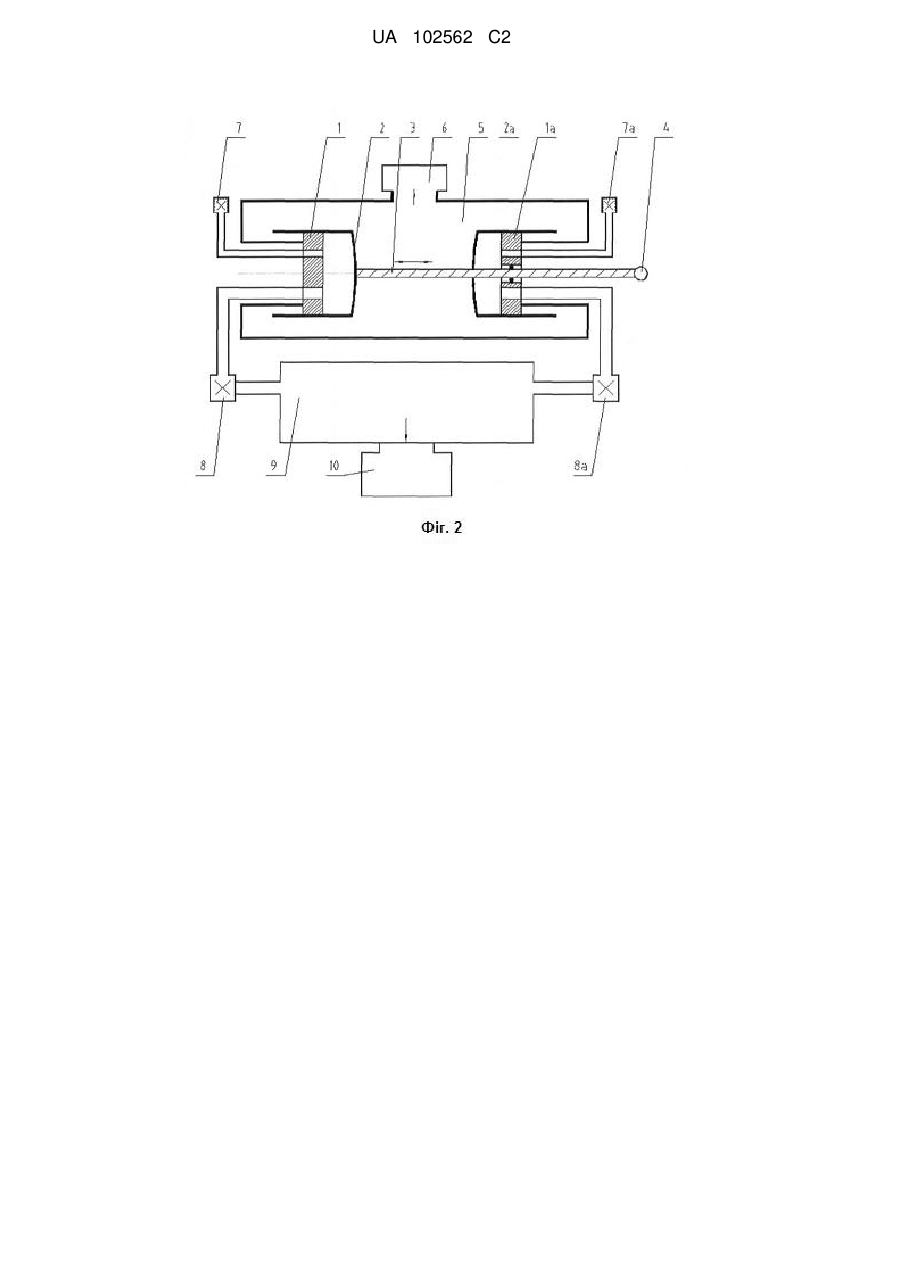
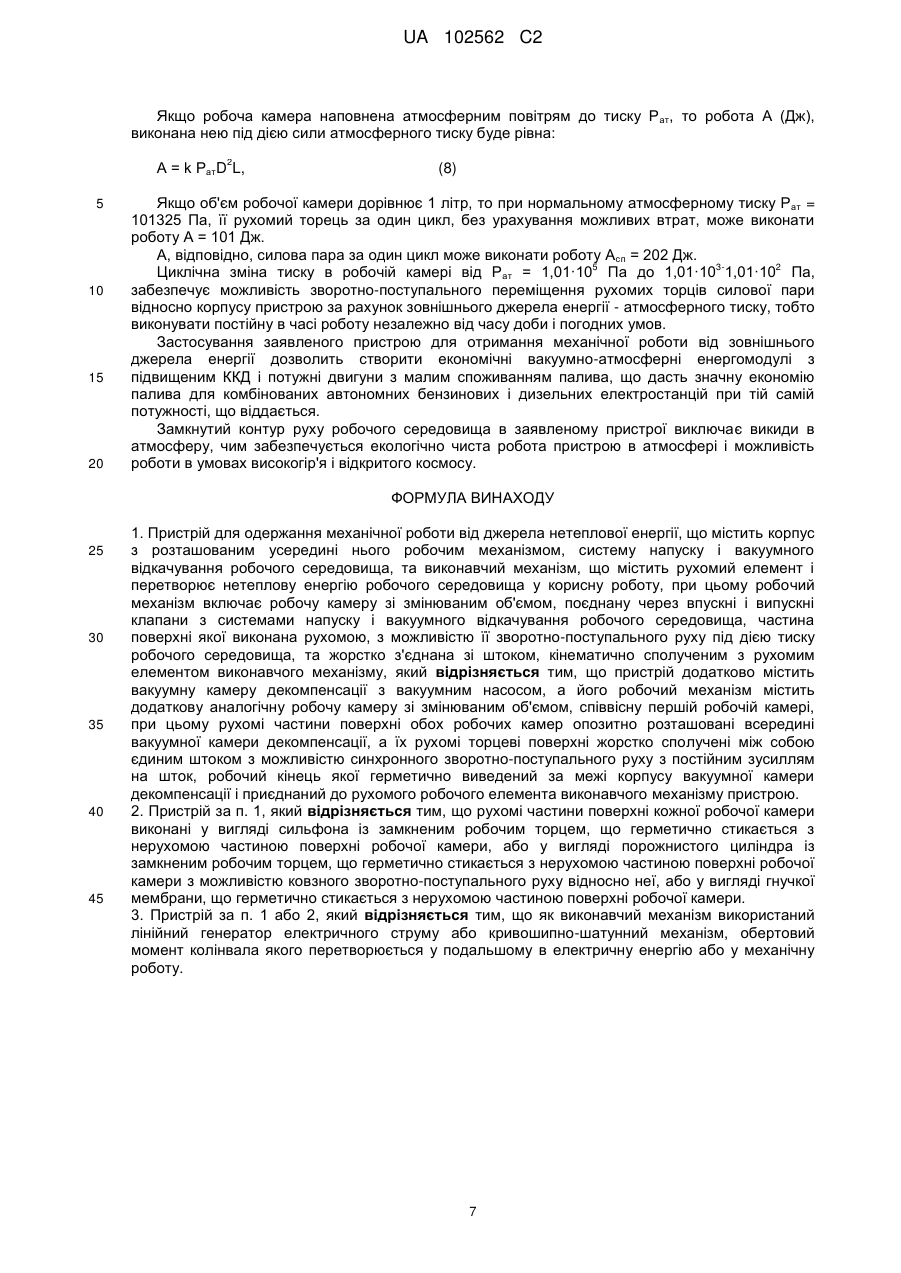
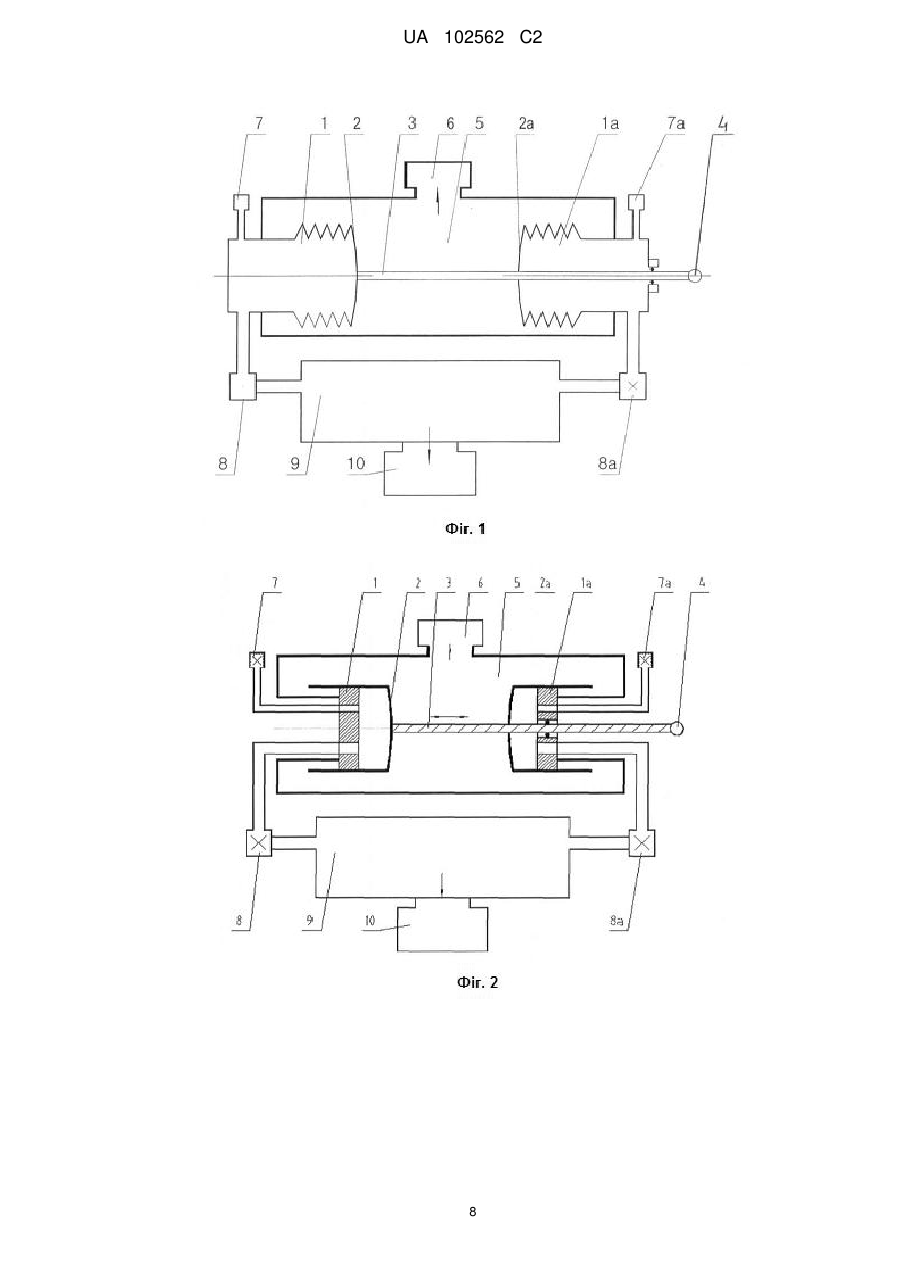
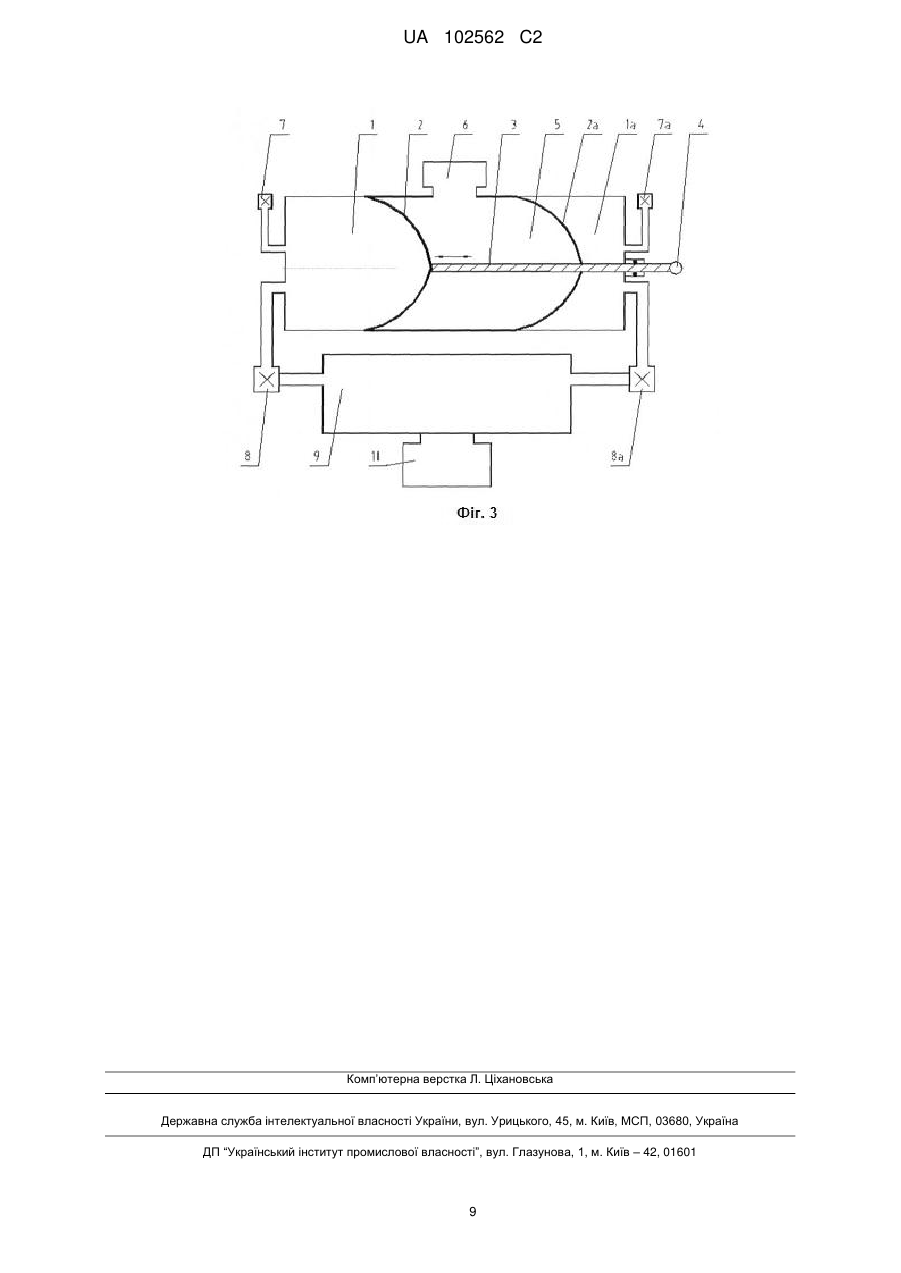
Реферат: Винахід належить до атмосферних двигунів. Двигун має корпус, робочий механізм з робочою камерою зі змінним об'ємом і кінематичну пару з можливістю зворотно-поступального руху відносно корпусу, також системи напуску і вакуумування робочої камери, механізм для перетворення механічної енергію в інші види енергії і вакуумну камеру декомпенсації з вакуумним насосом, в яку поміщений робочий механізм. Робочий механізм може бути виконаний як два опозитних сильфони або у вигляді циліндро-поршневої групи з 2-х опозитних циліндрів. Їхні рухомі торцеві поверхні жорстко прикріплені до штоків і сполучені в кінематичну пару з можливістю синхронного зворотно-поступального руху. Робочий механізм може бути виконаний як дві мембрани, що сполучені між собою єдиним штоком. Двигун сприяє перетворенню перепаду тиску між довкіллям і вакуумом у енергію. UA 102562 C2 (12) UA 102562 C2 UA 102562 C2 5 10 15 20 25 30 35 40 45 50 55 60 Пристрій належить до галузі машинобудування, зокрема до розробки двигунів, в яких використовується зовнішнє підведення енергії для генерування механічної роботи, і може бути використаний для створення двигунів, а також комбінованих автономних енергетичних агрегатів, для забезпечення електроживленням, зокрема, у високогірних умовах і для космічних апаратів, працюючих у відкритому космосі. Відомі атмосферні двигуни, принцип дії яких заснований на використанні атмосферного тиску як зовнішнього джерела нетеплової енергії, яка перетворюється в механічну роботу. Наприклад, пристрій, в якому атмосферний тиск використовується для отримання механічної роботи, містить класичну циліндропоршневу групу з двох поршнів, поєднаних загальним штоком, які рухаються зворотно-поступально в нерухомих циліндрах, при цьому зворотно-поступальна хода штока передається на основний вал за допомогою храпового механізму (патент GB 2 023746 A, F01 В 29/02, 1980 р.). Недоліком такого пристрою є складність конструкції, в якій передача механічної роботи храповим механізмом на основний вал, через закриту вакуумну оболонку, не дає можливості отримати прийнятний коефіцієнт корисної дії (далі - ККД) для практичного використання цього пристрою. Відомий пристрій, в якому, для отримання механічної роботи, як зовнішнє джерело енергії використовується атмосферний тиск (заявка на патент DE 41 31 627 А1, F01B 29/02, 25.03.1993 p.). Такий пристрій складається з нерухомого циліндра, в якому зворотно-поступально рухається поршень, пов'язаний з кривошипом за допомогою шатуна. Напуск і відкачування атмосфери здійснюється через канали, виконані в закритому торці циліндра. Недоліком цього пристрою є те, що як показали стендові випробування аналогічного пристрою, що проводяться авторами заявленого технічного рішення, при підвищенні частоти зворотно-поступального руху поршня вище 3 герц (180 обертів у хвилину) в області відкритої частини циліндра, де поршень контактує з повітряним середовищем, тиск атмосфери на зовнішню сторону торцевої поверхні поршня починає падати, що призводить до різкого зменшення ККД пристрою. Це пов'язано з турбулентними процесами, що відбуваються з повітряним середовищем в колодязі відкритої частини циліндра. Тобто, цей пристрій не може бути використаний для отримання електричної енергії генераторами на стандартній частоті з ККД, прийнятним для практичного застосування. Найбільш близьким до запропонованого є пристрій, в якому, для отримання механічної роботи (зокрема, переміщення вантажу, відносно опорної і підстеляючої поверхонь), як зовнішнє джерело енергії використовується атмосферний тиск (патент UA № 89112, B65G 7/00, 2009 p., а також патент ЕАПО № 013312, 2010 p.). Такий пристрій складається з опори, встановленої на підстеляючій поверхні, платформи з опорною поверхнею, вантажної платформи, жорстко пов'язаної з переміщуваним вантажем, робочої камери з робочим середовищем, виконаною у вигляді сильфона з еластичною бічною поверхнею, яка жорстко сполучена своєю верхньою основою з опорною поверхнею, а нижньою основою - з вантажною платформою. Робоча камера сполучена із засобами відкачування через випускний клапан, а з системою напуску робочого середовища - через впускний клапан. У пристрої також забезпечений замкнутий цикл руху робочого середовища. При цьому до нижньої основи робочої камери може бути жорстко приєднаний або переміщуваний вантаж або кривошипно-шатунний механізм з валом, що обертається. Цей пристрій, хоча і споживає додаткову зовнішню енергію для систем відкачування і напуску, проте має значні переваги в порівнянні з аналогами, оскільки воно технологічно і конструктивно простіше за аналогічні пристрої, що вигідно відрізняє його за можливостями практичного застосування. Проте недоліком його є те, що цей пристрій не може ефективно працювати в умовах високогір'я і у відкритому космосі, з причини зниженого тиску або повної відсутності атмосфери, а так само на великих висотах, з причини малого атмосферного тиску, при якому значно зменшується ККД пристрою. Задачею заявленого винаходу є удосконалення відомого пристрою для отримання механічної роботи, в якому шляхом модифікації його конструкції забезпечується можливість його функціонування в умовах довкілля, при одночасному зниженні витрат енергії на підтримку роботи пристрою з максимальним ККД. За рахунок чого збільшується продуктивність пристрою в цілому і розширюється сфера його застосування. Поставлена задача вирішується тим, що пристрій для одержання механічної роботи від джерела нетеплової енергії містить корпус з розташованим всередині нього робочим механізмом, систему напуску і вакуумного відкачування робочого середовища, та виконавчий 1 UA 102562 C2 5 10 15 20 25 30 35 40 45 50 55 механізм, що містить рухомий робочий елемент і перетворює нетеплову енергію робочого середовища у корисну роботу. Робочий механізм пристрою включає робочу камеру зі змінюваним об'ємом, поєднану через впускні і випускні клапани з системами напуску і вакуумного відкачування робочого середовища, частина поверхні якої виконана рухомою, з можливістю її зворотно-поступального руху під дією тиску робочого середовища, та жорстко з'єднана зі штоком, кінематично сполученим з рухомим робочим елементом виконавчого механізму. Заявлений пристрій відрізняється тим, що, він додатково містить вакуумну камеру декомпенсації (надалі - ВКД) з вакуумним насосом, а його робочий механізм містить додаткову аналогічну робочу камеру зі змінюваним об'ємом, співвісну з першою робочою камерою. При цьому рухомі частини поверхні обох робочих камер опозитно розташовані всередині ВКД, а їх рухомі торцеві поверхні жорстко сполучені між собою єдиним штоком, з можливістю одночасного синхронного зворотно-поступального руху з постійним зусиллям на шток. Робочий кінець штока герметично виведений за межі корпусу ВКД і приєднаний до рухомого робочого елемента виконавчого механізму пристрою. Рухомі частини поверхні обох робочих камер можуть бути виконані: - у вигляді сильфона, з замкненим робочим торцем, що герметично стикається з нерухомою частиною поверхні робочої камери; - або у вигляді порожнистого циліндра з замкненим робочим торцем, що герметично стикається, з нерухомою частиною поверхні робочої камери, з можливістю ковзного зворотнопоступального руху відносно неї; - або у вигляді гнучкої мембрани, що герметично стикається з нерухомою частиною поверхні робочої камери. Як виконавчий механізм заявленого пристрою можуть бути використані лінійний генератор електричного струму або кривошипно-шатунний механізм, обертовий момент колінвала якого перетворюється у подальшому в електричну енергію або в механічну роботу. Таким чином, основним принципом, закладеним в основу функціонування заявленого пристрою, є створення градієнта сил за рахунок різниці тисків в робочому механізмі пристрою, в даному випадку - штучно створеного вакуумного середовища всередині ВКД, що дає можливість використовувати атмосферний тиск для генерації механічної роботи з подальшим перетворенням в електричну енергію або корисну роботу. Опозитні робочі камери зі змінюваним об'ємом, виконані у декількох альтернативних технічних вирішеннях, описаних вище, працюють у заявленому пристрої на одному фізичному принципі, а саме: - рухомі частини поверхні камер завжди знаходяться у вакуумі, який у ВКД постійно підтримується: а) у разі роботи в атмосфері, або іншому середовищі - вакуумним насосом; б) у разі роботи у відкритому космосі - природним постійним відкачуванням через відкриті отвори ВКД; - рухомі торці камер здійснюють зворотно-поступальний рух під дією атмосферного тиску за рахунок різниці тисків у ВКД і в робочій камері. У заявленому пристрої закладена принципово інша, відносно, приміром, двигунів внутрішнього згоряння (ДВЗ), схема функціонування робочого механізму, який може виконувати корисну роботу тільки за наявності двох опозитних робочих камер, що складають силову пару, сполучену штоком. Силова пара з двох камер складає єдине ціле, в якій рухомі частини поверхні камер знаходяться у ВКД у вакуумі, мають можливість вільно рухатися під дією тиску зовнішнього середовища, в даному випадку - атмосфери, яка циклічно напускається в робочу камеру, а тиск на зовнішню поверхню рухомого її торця компенсується за рахунок постійного відкачування ВКД. Рухома торцева поверхня робочої камери не зазнає із зовнішнього боку компенсуючого тиску зовнішнього середовища - атмосфери і, у такті напуску атмосфери (який відбувається природним чином при відкритті впускного клапана), робоча камера робить робочий хід, збільшуючись до максимального розміру. При цьому опозитна робоча камера в цей час знаходиться у стадії відкачування і не чинить опору руху рухомої торцевої поверхні першої робочої камери, зменшуючись до мінімального розміру під дією штока, тобто для неї проходить такт холостого ходу. Таким чином, енергетичні витрати на виробництво робочого ходу пристроєм будуть потрібні тільки на роботу вакуумних насосів для відкачування робочих камер, під час їх холостого ходу, і підтримки необхідного вакууму у ВКД при роботі в атмосфері або інших середовищах. 2 UA 102562 C2 5 Енергетичні витрати на вакуумне відкачування робочих камер можна значно скоротити за рахунок використання ресивера необхідного об'єму, який розраховується на задану корисну потужність пристрою, що віддається. Відповідно до закону Бойля-Маріотта, співвідношення добутку тиску Р1 на об'єм V1 робочої камери до добутку тиску Р2 на об'єм V2 ресивера, при постійній температурі, буде: P1V1 = P2V2 (1) відповідно: P2 = P1V1/V2, (2). 10 15 20 25 30 35 40 45 50 55 Звідки слідує, щоб підтримувати в ресивері тиск приблизно у 100 разів менше, ніж в робочій камері при відкритому випускному клапані з мінімальними витратами енергії на відкачування, необхідно мати об'єм V2 в 100 разів більше об'єму V1. При цьому швидкість відкачування вакуумного насоса має бути більше швидкості напуску робочого середовища - атмосфери або газоподібного середовища з робочої камери в ресивер. Таким чином, підвищене споживання енергії пристрою потрібне тільки в пусковий період для попереднього відкачування вакуумною системою робочого механізму, ресивера і ВКД. При виході пристрою на робочий режим, споживання енергії системою відкачування значно скорочується, оскільки система відкачування, в цьому випадку, працює тільки на підтримку заданої різниці тисків в робочій камері і ресивері. Заявлений пристрій може працювати по замкнутому циклу, тобто без напуску і відкачування атмосфери, при цьому робоче середовище, що напускається в робочі камери, наприклад інертний газ, відкачується і нагнітається відкачуваною системою по замкнутому контуру з використанням ресивера попереднього розрідження, як було показано вище. В даному випадку загальне споживання енергії системою відкачування може зрости, проте в цьому випадку ККД заявленого пристрою не залежатиме від висоти над рівнем моря, що є істотною перевагою. При цьому робочий механізм пристрою не випускає в довкілля відпрацьоване робоче середовище, тобто пристрій є екологічно чистим. Наявність вакууму у ВКД виключає опір зовнішнього середовища частинам робочого механізму, що рухаються, що дозволяє застосовувати робочі камери з торцевими поверхнями великого діаметра і будь-якої форми - пласкі, увігнуті або округло вигнуті назовні, і вибирати оптимальні форми для отримання максимальної корисної потужності, що віддається. Для забезпечення тривалої роботи заявленого пристрою у відкритому космосі дуже суттєво мінімізувати наявність у ньому пар, що труться. З цією метою, в заявленій конструкції пристрою запропонована форма виконання рухомих торцевих поверхонь робочих камер у вигляді, як мінімум, двох мембран з еластичного матеріалу, наприклад, з гуми, зробленої на основі нанотехнологій. Саме в таких умовах використання заявленого пристрою, застосування мембран, як альтернативного виконання рухомих частин поверхні робочих камер, на відміну від їх виконання у вигляді порожнистого циліндру з замкненим робочим торцем, є переважним тому, що істотно спрощує конструкцію і зменшує вагу пристрою. Крім того, таке альтернативне вирішення, має можливість розташування декількох послідовно закріплених на штоку додаткових мембран з одного і з іншого боку від ВКД, що дозволить значно збільшити потужність силової пари без зміни радіальних розмірів пристрою. Утворені таким чином робочі камери наповнюються і відкачуються синхронно через єдину систему клапанів відкачування і напуску, тому зусилля мембран, діючих синхронно на шток, відповідно складається. У відкритому космосі витрати енергії на підтримку роботи пристрою з максимальним ККД будуть мінімальні, відносно корисної потужності, що віддається, оскільки відкачування ВКД, в даному випадку, не потребує енергетичних витрат. Заявлений пристрій може працювати і у водному середовищі, при цьому для відкачування зовнішнього середовища - рідини, мають бути використані вакуумні водокільцеві насоси або інші засоби відкачування рідин, залежно від призначення використання пристрою. Як випливає з вищевказаного, заявлені альтернативні виконання рухомих частин поверхні камер зі змінюваним об'ємом робочого механізму пристрою не порушують принципу єдності винаходу. Так як, у будь-якому із заявлених альтернативних виконань, робочі камери виконують одну і ту ж функцію, працюють в заявленому пристрої на одному фізичному принципі, коли рухомі торці камер, незалежно від форми їх виконання, здійснюють зворотно-поступальні рухи під дією атмосферного тиску за рахунок різниці тисків у ВКД і в робочій камері. І, у поєднанні з 3 UA 102562 C2 5 10 15 20 25 30 35 40 45 50 55 60 іншими конструктивними елементами пристрою, однаковою мірою сприяють досягненню одного і того ж технічного результату при використанні пристрою - отримання механічної роботи від зовнішнього джерела нетеплової енергії. Альтернативні виконання рухомих частин поверхні робочих камер спричинені виключно спеціальними умовами, в яких може бути використаний заявлений пристрій, а так само технологією виготовлення і необхідного ресурсу роботи пристрою як енергетичної установки. Що дозволить гнучко використовувати його в залежності від призначення. Так, конструкція заявленого пристрою з виконанням рухомих частин поверхні його робочих камер у вигляді сильфонів може економічно використовуватися для генерації електричного струму малих та середніх потужностей непромислового призначення - для живлення будинків, побутових приладів та ін. Конструкція заявленого пристрою з виконанням рухомих частин поверхні його робочих камер у вигляді порожнистих циліндрів може використовуватися для генераторів промислового призначення з проектною генерованою потужністю від 50 кВт до 2-10 Мвт. Конструкція заявленого пристрою з виконанням рухомих частин поверхні його робочих камер у вигляді гнучких мембран може використовуватися у мобільних малогабаритних генераторах різного призначення, зокрема у спеціальних умовах космічного або водного простору, як вже зазначалося вище. В цілому, в заявленому пристрої принциповим є те, що, як вказувалося вище, саме штучно створене вакуумне середовище у ВКД створює зміну рівноваги діючих на рухомі торцеві поверхні робочих камер сил двох середовищ - атмосфери і вакууму. Тобто, зовнішнє середовище, в даному випадку атмосферний тиск, при напуску атмосфери в робочу камеру є джерелом сили, що приводить пристрій в дію. Таким чином, в даному випадку, використаний діаметрально протилежний фізичний принцип, на відміну від принципу дії ДВЗ, замкнутих пневматичних і гідравлічних систем, в яких робоче середовище з підвищеним тиском, що досягає 107 Па, є джерелом сили, що управляє робочими і виконавчими механізмами пристрою. Заявлений пристрій працює в режимі однотактного циклу, при якому кожен хід силової пари є робочим з постійним рівномірним зусиллям на шток. Тобто, будь-який рух силової пари вперед-назад є робочим ходом, на відміну від класичних двох і чотиритактних циклів двигунів внутрішнього згорання, в яких поршні рухаються в опозитній парі назустріч один одному. Це дозволяє ефективно застосовувати в заявленому пристрої лінійні генератори як перетворювачі механічної енергії в електричну, що, у свою чергу, дозволяє, за необхідності експлуатації пристрою у нестандартних умовах, виключити кривошипно-шатунний виконавчий механізм як ланку кінематичної схеми пристрою, а відтак - спростити кінематику пристрою і підвищити потужність, що віддається, при тих же заданих параметрах. Таким чином, сукупність заявлених ознак винаходу є необхідною і достатньою для вирішення поставленої задачі. Схема заявленого пристрою представлена на кресленнях, де рухомі частини поверхні обох робочих камер виконані: Фіг. 1 - у вигляді сильфона, з замкненим робочим торцем, що герметично стикається з нерухомою частиною поверхні робочої камери; Фіг. 2 - у вигляді порожнистого циліндра з замкненим робочим торцем, що герметично стикається, з нерухомою частиною поверхні робочої камери, з можливістю ковзного зворотнопоступального руху відносно неї; Фіг. 3 - у вигляді гнучкої мембрани, що герметично стикається з нерухомою частиною поверхні робочої камери. Заявлений пристрій містить (див. Фіг. 1, або Фіг. 2, або Фіг. 3) містить ліву 1 і праву 1а робочі камери зі змінюваним об'ємом з рухомими робочими торцями, відповідно, 2 і 2а, які жорстко сполучені між собою єдиним штоком 3, робочий кінець 4 якого герметично виведений за межі корпусу ВКД 5 і кінематично сполучений з рухомим елементом виконавчого механізму (на схемах не показаний), що перетворює нетеплову енергію робочого середовища у корисну роботу. Рухомі частини поверхні обох робочих камер опозитно розташовані всередині ВКД 5, у якій також знаходиться вакуумний насос 6. Система напуску і вакуумного відкачування робочого середовища містить впускний 7 і випускний 8 клапани лівої робочої камери і відповідні клапани 7а і 8а правої робочої камери, ресивер 9 і вакуумний насос 10. При цьому впускні і випускні клапани виконані в нерухомих частинах робочих камер, розташованих за межами ВДК 5 (контур ВДК 5 на схемах умовно виділений потовщеною лінією). 4 UA 102562 C2 5 10 15 20 25 30 35 40 45 50 55 60 Робочі камери 1 і 1а приєднані до різних систем напуску атмосфери через клапани 7 і 7а і до однієї системи відкачування через клапани 8 і 8а, ресивер 9 і вакуумний насос 10. На всіх кресленнях представлена розімкнена схема циркуляції робочого середовища для кожної вакуумної робочої камери, тобто виконана для роботи силової пари пристрою по розімкненому контуру з безпосереднім впусканням атмосфери - робочого середовища - через клапани 7 і 7а в робочу камеру і відкачуванням робочого середовища в довкілля через клапани 8 і 8а в ресивер 9 і вакуумний насос 10. Пристрій працює наступним чином. 2 У початковому положенні ресивер 9 і ВКД 5 відкачані до тиску Р 0 = 10- Па і постійно відкачуються вакуумними насосами 10 і 6. На початку циклу відкриваються клапан відкачування 8 і клапан напуску 7а, а клапани напуску 7 і відкачування 8а закриваються. При цьому, рухомі торці обох робочих камер синхронно рухаються у бік стискування робочого об'єму лівої камери 1 під дією сили атмосферного тиску на внутрішню рухому торцеву поверхню правої робочої камери 1а, яка починає наповнюватися атмосферою через фільтр відкритого клапана 7а, здійснюючи робочий хід. Ліва робоча камера 1 знаходиться у відкачаному стані через відкритий клапан 8. Після чого, клапан відкачування 8 і клапан напуску 7а закриваються, а клапани відкачування 8а і напуску 7 відкриваються. При цьому рухомі торці обох робочих камер синхронно рухаються у бік стискування робочого об'єму правої камери 1а під дією сили атмосферного тиску на торцеву поверхню лівої робочої камери 1, яка наповнюється атмосферою через фільтр клапана 7. Тобто, рухомий торець лівої камери 1 здійснює робочий хід, а права робоча камера 1а стискується, не чинячи опору, оскільки вона відкачана до тиску, рівного тиску у вакуумній камері декомпенсації 5. При цьому зусилля рухомого торця лівої камери 1, через - шток 3, передається на рухомий робочий елемент виконавчого механізму пристрою, який кінематично поєднаний з робочим кінцем 4 штока 3, і який перетворює нетеплову енергію робочого середовища у корисну роботу. Після чого, клапани відкачування 8 і напуску 7а знову відкриваються, а клапани відкачування 8а і напуску 7 закриваються, і цикл повторюється. Тобто, тепер права камера здійснює робочий хід при русі рухомих торців обох камер у протилежну сторону стискування робочого об'єму лівої камери. Таким чином здійснюється однотактний цикл, у якому кожен хід силової пари з двох камер є робочим. На Фіг. 1 і Фіг. 2 представлений момент роботи пристрою, коли силова пара з двох камер знаходиться всередині такту робочого ходу, тобто, коли права і ліва робочі камери мають однаковий об'єм. На Фіг. 3 представлений момент роботи пристрою, коли силова пара знаходиться у кінці такту робочого ходу лівої робочої камери, тобто, коли ліва 1 і права 1а робочі камери в цій точці мають максимальний і мінімальний об'єми відповідно. Тобто, опозитні рухомі торцеві частини поверхні обох робочих камер, утворюючи цілісну конструкцію, синхронно рухаються в один бік під час такту, забезпечуючи безперервний у часі робочий хід з постійним зусиллям на шток в один бік, і продовжуючи робочий хід іншим з постійним зусиллям в інший бік, тобто по однотактному циклу. Для забезпечення можливості циклічного, що періодично повертається в початкове положення, руху рухомих торців робочих камер під дією атмосферного тиску Р ат, або тиском іншого зовнішнього середовища, в якому знаходиться силова пара, необхідно забезпечити послідовне швидке відкачування до тиску: -1 -2 Р0 (10 - 10 ) Рат і напуск робочого середовища до тиску Р1 = Рат в робочі камери силової пари. Це досягається завдяки тому, що робочі камери силової пари сполучені з системами напуску і відкачування робочого середовища через впускні і випускні клапани, розташовані в їх нерухомих торцях. У свою чергу, забезпечення можливості швидкої зміни тиску в кожній робочій камері дозволяє отримати безперервний циклічний процес руху рухомих торців силової пари, яка здійснює роботу по однотактному вакуумно-атмосферному циклу. При цьому діюча на рухомі торці сила постійна за величиною по усій довжині робочого ходу і визначається тільки площею рухомої торцевої поверхні камери і різницею зовнішнього і внутрішнього тиску в камерах. Для зменшення енергетичних втрат і втрат робочого середовища, а також, для забезпечення можливості роботи у відкритому космосі, система відкачування може бути сполучена з системою напуску, забезпечуючи тим самим замкнутий цикл руху робочого середовища. При цьому, в якості робочого середовища вибирається газ з оптимальними 5 UA 102562 C2 5 10 15 20 25 30 параметрами (приміром водень, гелій, аргон та ін.) для ефективного відкачування робочих камер вибраними типами насосів. Наявність силової пари з двох опозитно розташованих робочих камер, які жорстко скріплені єдиним штоком, дозволяє забезпечити в процесі циклу постійне в часі зусилля, що забезпечує плавну без ривків і вібрацій роботу вузлів пристрою. При цьому баланс корисної потужності, споживаної системами відкачування і напуску, і корисної потужності, що віддається на шток силовою парою, визначається швидкостями систем відкачування робочої камери і систем напуску робочого середовища в камеру, а також, кількістю циклів в одиницю часу. У разі альтернативного виконання рухомих частин поверхні обох робочих камер у вигляді гнучких мембран, кріплення мембрани до нерухомої частини поверхні робочої камери може бути вакуумнощільним жорстко фіксованим або ковзним, і визначається конструктивною доцільністю застосування пристрою. Можливість вакуумнощільного ковзного руху мембран уздовж стінок ВКД дозволяє збільшувати корисний об'єм робочої камери до заданих розрахункових розмірів, і, відповідно, потужність, що віддається, при інших заданих параметрах пристрою. Як зазначалося вище, заявлений пристрій може працювати і по замкнутому циклу, тобто без напуску і відкачування атмосфери. При роботі по замкнутому контуру робочого середовища, силова пара може виконувати підвищену роботу відносно базового циклу, наприклад, подвійну упродовж одного циклу. Це може відбуватися за умови, якщо вакуумний насос при відкачуванні першої робочої камери забезпечуватиме на виході в проміжному ресивері такий тиск Р1 робочого середовища, який, при напуску в опозитну робочу камеру, перевищуватиме, наприклад, у два рази атмосферний тиск зовнішнього середовища Рат. При цьому тиск Р0 в першій камері при холостому ході повинен забезпечуватися засобами відкачування на рівні -1 -2 Р0 (10 -10 ) Рат, , яке постійно підтримується в камері декомпенсації. В цьому випадку кожна робоча камера має безперервний робочий хід з подвійним зусиллям на шток. При цьому робота силової пари Асп, яку вона може виконувати у випадку, якщо Рвс = Рат = Р1 буде дорівнювати: 2 Acп = 2kPaтD L, 35 де: k = π/4 = 0,785 D - ефективний діаметр поверхні рухомого торця камери; L - довжина робочого ходу рухомого торця камери. 2 4 У випадку, якщо Р1 = 2Рвс при Р0 = 10- -10- Рвс, силова пара виконує роботу, яка дорівнює: 2 Acn = 4kPвсD L, 40 (4) Приклад. Робоча камера, у будь-якому із заявлених альтернативних виконань, має циліндричну 3 форму, тому її максимальний об'єм V (м ), буде рівний: 2 V = kD L, 45 (3) (5) де: D - ефективний діаметр поперечного перерізу камери, м; L - довжина робочої камери, яка дорівнює відстані між верхньою і нижньою точками ходу рухомого її торця, м. Якщо камера знаходиться у вакуумі, то сила F атмосферного тиску Р ат (Па) на торцеву 2 ефективну площу її поверхні S (м ) буде рівна: 50 F = Рат S, (6) або: 2 F = kPaтD , (7) 6 UA 102562 C2 Якщо робоча камера наповнена атмосферним повітрям до тиску Р ат, то робота А (Дж), виконана нею під дією сили атмосферного тиску буде рівна: 2 А = k РатD L, 5 10 15 20 (8) Якщо об'єм робочої камери дорівнює 1 літр, то при нормальному атмосферному тиску Р ат = 101325 Па, її рухомий торець за один цикл, без урахування можливих втрат, може виконати роботу А = 101 Дж. А, відповідно, силова пара за один цикл може виконати роботу Асп = 202 Дж. 5 32 Циклічна зміна тиску в робочій камері від Рат = 1,01·10 Па до 1,01·10 1,01·10 Па, забезпечує можливість зворотно-поступального переміщення рухомих торців силової пари відносно корпусу пристрою за рахунок зовнішнього джерела енергії - атмосферного тиску, тобто виконувати постійну в часі роботу незалежно від часу доби і погодних умов. Застосування заявленого пристрою для отримання механічної роботи від зовнішнього джерела енергії дозволить створити економічні вакуумно-атмосферні енергомодулі з підвищеним ККД і потужні двигуни з малим споживанням палива, що дасть значну економію палива для комбінованих автономних бензинових і дизельних електростанцій при тій самій потужності, що віддається. Замкнутий контур руху робочого середовища в заявленому пристрої виключає викиди в атмосферу, чим забезпечується екологічно чиста робота пристрою в атмосфері і можливість роботи в умовах високогір'я і відкритого космосу. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 1. Пристрій для одержання механічної роботи від джерела нетеплової енергії, що містить корпус з розташованим усередині нього робочим механізмом, систему напуску і вакуумного відкачування робочого середовища, та виконавчий механізм, що містить рухомий елемент і перетворює нетеплову енергію робочого середовища у корисну роботу, при цьому робочий механізм включає робочу камеру зі змінюваним об'ємом, поєднану через впускні і випускні клапани з системами напуску і вакуумного відкачування робочого середовища, частина поверхні якої виконана рухомою, з можливістю її зворотно-поступального руху під дією тиску робочого середовища, та жорстко з'єднана зі штоком, кінематично сполученим з рухомим елементом виконавчого механізму, який відрізняється тим, що пристрій додатково містить вакуумну камеру декомпенсації з вакуумним насосом, а його робочий механізм містить додаткову аналогічну робочу камеру зі змінюваним об'ємом, співвісну першій робочій камері, при цьому рухомі частини поверхні обох робочих камер опозитно розташовані всередині вакуумної камери декомпенсації, а їх рухомі торцеві поверхні жорстко сполучені між собою єдиним штоком з можливістю синхронного зворотно-поступального руху з постійним зусиллям на шток, робочий кінець якої герметично виведений за межі корпусу вакуумної камери декомпенсації і приєднаний до рухомого робочого елемента виконавчого механізму пристрою. 2. Пристрій за п. 1, який відрізняється тим, що рухомі частини поверхні кожної робочої камери виконані у вигляді сильфона із замкненим робочим торцем, що герметично стикається з нерухомою частиною поверхні робочої камери, або у вигляді порожнистого циліндра із замкненим робочим торцем, що герметично стикається з нерухомою частиною поверхні робочої камери з можливістю ковзного зворотно-поступального руху відносно неї, або у вигляді гнучкої мембрани, що герметично стикається з нерухомою частиною поверхні робочої камери. 3. Пристрій за п. 1 або 2, який відрізняється тим, що як виконавчий механізм використаний лінійний генератор електричного струму або кривошипно-шатунний механізм, обертовий момент колінвала якого перетворюється у подальшому в електричну енергію або у механічну роботу. 7 UA 102562 C2 8 UA 102562 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for receiving mechanical work from nonthermal energy source
Автори англійськоюDubynskyi Ihor Mykolaiovych, Dubinskii Andriei Ihorievich, Dubynskyi Andrii Ihorovych
Назва патенту російськоюУстройство для получения механической работы от источника нетепловой энергии
Автори російськоюДубинский Игорь Николаевич, Дубинский Андрей Игоревич
МПК / Мітки
МПК: F04B 45/00, F01B 29/00, F16J 3/00
Мітки: енергії, одержання, пристрій, механічної, джерела, нетеплової, роботи
Код посилання
<a href="https://ua.patents.su/11-102562-pristrijj-dlya-oderzhannya-mekhanichno-roboti-vid-dzherela-neteplovo-energi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для одержання механічної роботи від джерела нетеплової енергії</a>
Пристрій для одержання механічної роботи від зовнішнього джерела нетеплової енергії
Номер патенту: 38233
Опубліковано: 25.12.2008
Автори: Дубинський Ігор Миколайович, Дубінскій Андрєй Ігорєвіч
МПК: B65G 7/00, F01K 25/00
Мітки: одержання, нетеплової, енергії, пристрій, зовнішнього, механічної, роботи, джерела
Формула / Реферат:
1. Пристрій для одержання механічної роботи від зовнішнього джерела нетеплової енергії, що містить корпус, герметичну робочу порожнину з робочим середовищем, яка виконана у вигляді циліндра із закритою торцевою поверхнею, системи відкачування і напускання робочого середовища з випускним і впускним клапанами, що сполучають підвідні магістралі цих систем з робочою порожниною, шатун і колінвал кривошипно-шатунного механізму (КШМ), який...
Пристрій для одержання механічної роботи від зовнішнього джерела нетеплової енергії
Номер патенту: 89894
Опубліковано: 10.03.2010
Автори: Дубінскій Андрєй Ігорєвіч, Дубинський Ігор Миколайович
МПК: F01B 29/00, F01B 15/00
Мітки: пристрій, роботи, нетеплової, одержання, енергії, зовнішнього, джерела, механічної
Формула / Реферат:
1. Пристрій для одержання механічної роботи від зовнішнього джерела нетеплової енергії, що містить корпус, герметичну робочу порожнину з робочим середовищем, яка виконана у вигляді циліндра із закритою торцевою поверхнею, системи відкачування і напуску робочого середовища з випускним і впускним клапанами, що сполучають підвідні магістралі цих систем з робочою порожниною, шатун і колінвал кривошипно-шатунного механізму, який відрізняється...
Пристрій для одержання механічної роботи від джерела нетеплової енергії
Номер патенту: 60364
Опубліковано: 10.06.2011
Автори: Дубинський Ігор Миколайович, Дубінскій Андрєй Ігорєвіч
МПК: F01B 29/00
Мітки: механічної, енергії, джерела, пристрій, роботи, нетеплової, одержання
Формула / Реферат:
1. Пристрій для одержання механічної роботи від джерела нетеплової енергії, що містить корпус; робочий механізм, що включає робочу камеру зі змінним об'ємом і кінематичну пару, з можливістю зворотно-поступального руху відносно корпуса; системи напуску і вакуумного відкачування робочого середовища з робочої камери; виконавчий механізм, який відрізняється тим, що пристрій додатково містить вакуумну камеру декомпенсації з вакуумним насосом, в...
Спосіб одержання механічної енергії і пристрій для його здійснення
Номер патенту: 49381
Опубліковано: 16.09.2002
Автор: Карацюба Сергій Михайлович
МПК: F03G 7/00
Мітки: здійснення, одержання, енергії, спосіб, механічної, пристрій
Формула / Реферат:
1. Спосіб одержання механічної енергії шляхом переміщення під дією перемінних сил плавучості замкнутого контуру через повітряне і рідке середовища, для чого на замкнутому контурі розташовують заповнену рідким робочим тілом послідовність камер, що змінюють свою плавучість у рідкому середовищі за рахунок зміни стану робочого тіла в залежності від фізичних характеристик використовуваних середовищ, який відрізняється тим, що рідке середовище...
Пристрій для одержання механічної енергії
Номер патенту: 18020
Опубліковано: 16.10.2006
Автор: Чміль Володимир Степанович
МПК: F03B 17/00
Мітки: пристрій, механічної, енергії, одержання
Формула / Реферат:
Пристрій для одержання механічної енергії, що містить заповнену рідиною ємність, привідні зубчасті колеса, обхоплені нескінченним робочим органом, який відрізняється тим, що робочий орган обладнаний поплавцями, спроможними двічі змінювати свої об'єми за один оберт робочого органа і тим самим забезпечувати постійну вагову різницю плечей робочого органа в рідині.
Попередній патент: Накладний перетворювач для вихорострумового контролю феромагнітних матеріалів
Наступний патент: Молот безшаботний гідравлічний вертикальний
Випадковий патент: Спосіб приготування рослинного молока з горіхів