Молот безшаботний гідравлічний вертикальний
Формула / Реферат
Молот безшаботний гідравлічний вертикальний, який містить бак гідравлічного зв'язку верхньої та нижньої баб, верхню бабу, що спирається на верхні амортизатори, які встановлені на верхні перехідні плити, що спираються на бічні плунжери, на яких закріплені поршні гідравлічних привідних циліндрів, що встановлені на верхній поверхні бака гідравлічного зв'язку баб, та нижню бабу, який відрізняється тим, що в баці гідравлічного зв'язку баб симетрично вертикальній осі молота розташовано два плунжери, на які спирається нижня перехідна плита, нижній амортизатор і нижня баба, при цьому співвісно центральній осі молота розташовано циліндр, в якому розміщено привідний плунжер, верхній торець якого стикається з нижньою перехідною плитою, причому кільцеві площі поршнів, закріплених на бічних плунжерах, підпорядковуються залежності:
![]() ,
,
де ![]() - прискорення вільного падіння;
- прискорення вільного падіння;
![]() - маси верхньої і нижньої баб;
- маси верхньої і нижньої баб;
![]() - тиск робочої рідини і тиск зливу;
- тиск робочої рідини і тиск зливу;
а площа поперечного перерізу привідного плунжера визначається як
![]() ,
,
при цьому відношення площ поперечних перерізів плунжерів, на які спираються баби, дорівнює відношенню мас баб, тобто
![]() ,
,
де ![]() площі поперечних перерізів плунжерів, на які спираються верхня і нижня баби.
площі поперечних перерізів плунжерів, на які спираються верхня і нижня баби.
Текст
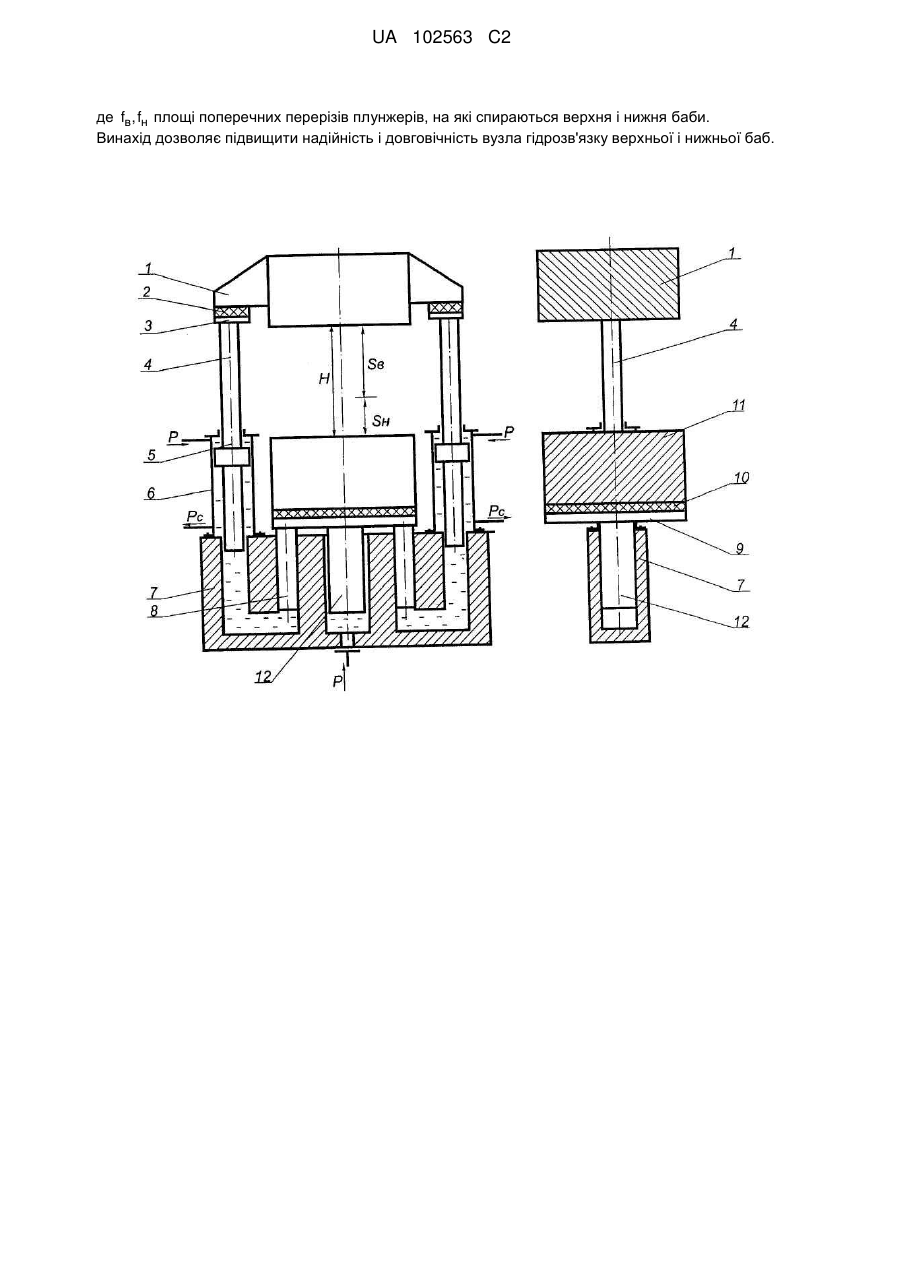
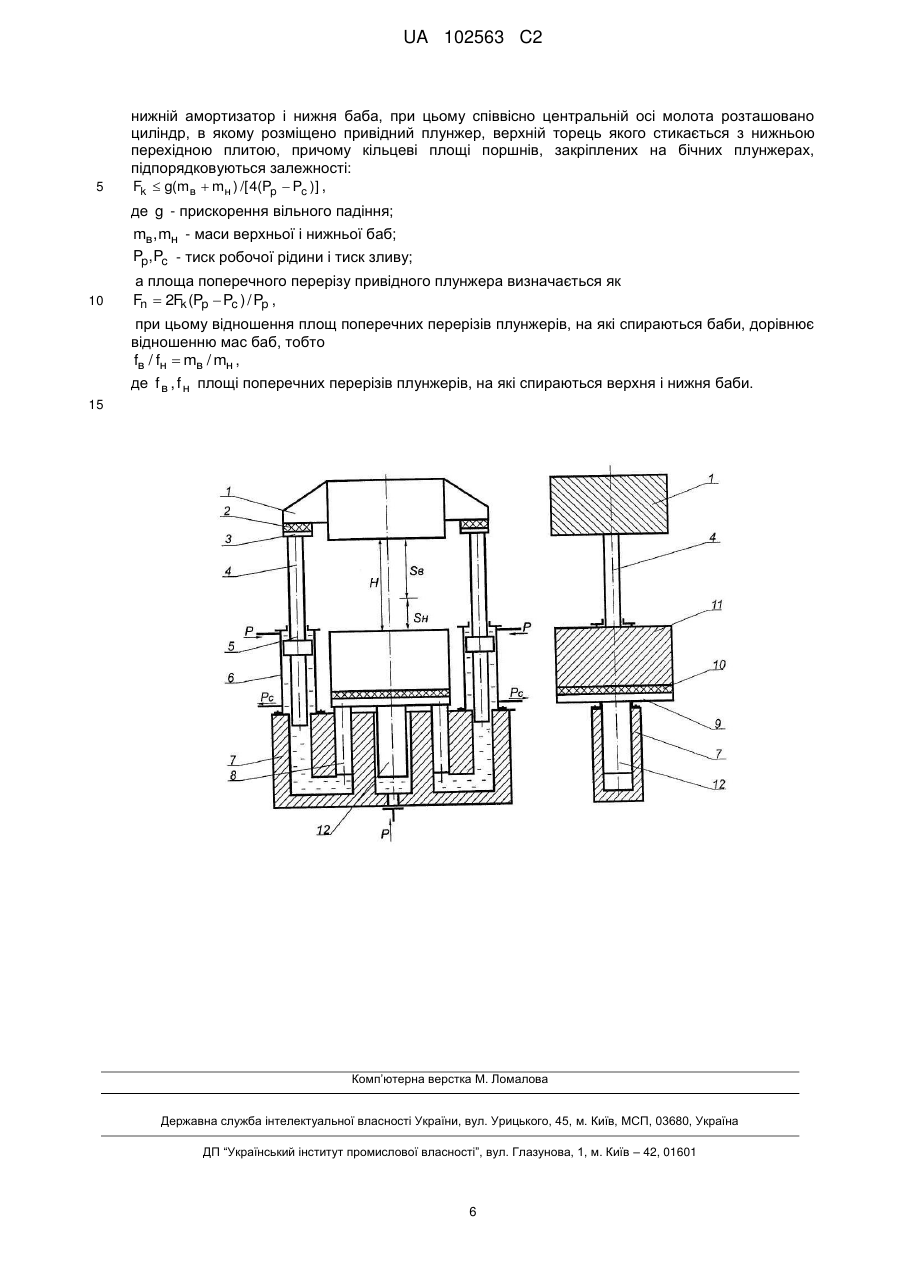
Реферат: Винахід належить до галузі машинобудування, а особливо - до ковальсько-штампувального устаткування. Молот безшаботний гідравлічний вертикальний, містить бак гідравлічного зв'язку верхньої та нижньої баб, верхню бабу, що спирається на верхні амортизатори, які встановлені на перехідні плити, що спираються на бічні плунжери, на яких закріплені поршні гідравлічних привідних циліндрів, що встановлені на верхній поверхні бака гідравлічного зв'язку баб, та нижню бабу. В баці гідравлічного зв'язку баб симетрично вертикальній осі молота розташовано два плунжери, на які спирається нижня перехідна плита, амортизатор і нижня баба, при цьому співвісно центральній осі молота розташовано циліндр, в якому розміщено привідний плунжер, верхній торець якого стикається з нижньою перехідною плитою, причому кільцеві площі поршнів, закріплених на бічних плунжерах, підпорядковуються залежності: Fk g(mв mн ) /[ 4(Pp Pc )] , де g - прискорення вільного падіння; mв , mн - маси верхньої і нижньої баб; Pp ,Pc - тиск робочої рідини і тиск зливу. Площа поперечного перерізу привідного плунжера визначається як Fn 2Fk (Pp Pc ) / Pp , при цьому відношення площ поперечних перерізів плунжерів, на які спираються баби, дорівнює відношенню мас баб, тобто fв / fн mв / mн , UA 102563 C2 (12) UA 102563 C2 де fв , fн площі поперечних перерізів плунжерів, на які спираються верхня і нижня баби. Винахід дозволяє підвищити надійність і довговічність вузла гідрозв'язку верхньої і нижньої баб. UA 102563 C2 5 10 15 20 25 30 35 40 Винахід належить до галузі машинобудування, а саме - до конструкції ковальськоштампувального устаткування. Відомо безшаботний вертикальний молот, який містить верхню бабу з бічними штоками і плунжерами, нижню бабу з центральним штоком і плунжером, гідробак з розташованими в ньому бічними плунжерами і центральним плунжером, який виконаний як одне ціле з штоком привідного циліндра таким чином, що діаметр плунжера більше діаметра штока приводного циліндра [1]. Недолік відомого молота полягає в тому, що, по-перше, привідний циліндр розташований під гідравлічним баком зв'язку баб, що призводить до підвищення загальної висоти молота не менше, ніж на величину ходу нижньої баби. По-друге, молот приводиться в дію прикладанням зусилля до однієї баби, друга баба приводиться в рух через вузол гідравлічного зв'язку баб. Аналіз рівнянь швидкостей баб, виконаний в роботі [2], для даної схеми приводу молота в дію, показує, що на швидкості баб, які збільшуються пропорційно часу, накладаються гармонійні складові, що знаходяться в противофазі. Якщо при ударі більше швидкість верхньої баби, центр тяжіння баб переміщатиметься вниз, що призведе до підвищення тиску рідини в гідравлічному баку зв'язку баб, якщо більше швидкість нижньої баби, вірогідне розкриття стиків у вузлі гідравлічного зв'язку баб. Вказаний недолік стримує підвищення техніко-економічних показників безшаботного молота і знижує його надійність. Відомо безшаботний вертикальний гідравлічний молот [3] (прототип), який містить верхню бабу з бічними амортизаторами, перехідними плитами і плунжерами, і бак гідравлічного зв'язку верхньої і нижньої баб, співвісно з бічними плунжерами встановлені приводні гідравлічні циліндри, поршні яких закріплені на плунжерах верхньої баби. Недолік відомої конструкції - в зниженні надійності і довговічності вузла гідрозв'язку баб. Зниження надійності випливає з того, що розгін нижньої баби на удар здійснюється шляхом підвищення тиску рідини в гідробаці бічними плунжерами, на які діє верхня баба, що приводиться в рух привідними циліндрами. Окрім цього, як показує аналіз рівнянь швидкостей баб, виконаний в роботі [2], у молотів, які приводяться в дію силою, що прикладається до однієї баби, на швидкості баб, які збільшуються пропорційно часу дії сили, накладаються гармонійні складові, що знаходяться в противофазі. Якщо при ударі більшу швидкість має верхня баба, центр тяжіння баб переміщатиметься вниз, що приведе до подальшого збільшення тиску рідини в гідравлічному баку зв'язку баб; якщо більшу швидкість має нижня баба, центр тяжіння баб переміщатиметься вгору, що приведе до вірогідного розкриття стиків у вузлі гідравлічного зв'язку баб. В основу даного технічного рішення поставлено задачу удосконалення безшаботного гідравлічного вертикального молота шляхом того, що в гідравлічному баці зв'язку баб симетрично до вертикальної осі молота розташовано два плунжери, на яких спирається нижня перехідна плита, амортизатор і нижня баба; співвісно центральній осі молота розташовано циліндр, в якому розміщено привідний плунжер, верхній торець якого стикається з нижньою перехідною плитою. Кільцеві площі поршнів, закріплених на бічних плунжерах, підкоряються залежності Fk g(mв mн ) /[ 4(Pp Pc )] , де g - прискорення вільного падіння; mв ,mн - маси верхньої і нижньої баб; Pp , Pc - тиск робочої рідини і тиск зливу; 45 площа поперечного перерізу привідного плунжера визначається як Fn 2Fk (Pp Pc ) / P] , відношення площ поперечних перерізів плунжерів, на які спираються баби, дорівнює відношенню мас баб, тобто fв / fн mв / mн , 50 де fв , fн - площі поперечних перерізів плунжерів, на які спираються верхня і нижня баби. На кресленні представлена принципова схема безшаботного гідравлічного вертикального молота, який містить верхню бабу 1, що спирається на верхні амортизатори 2, встановлені на перехідні плити 3, що спираються на бічні плунжери 4, на яких закріплені поршні 5 гідравлічних привідних циліндрів 6, встановлених на верхню поверхню гідравлічного бака 7. У баці 7 симетрично до вертикальної осі молота розташовано два плунжери 8, на які спирається нижня плита 9 з розташованим на ній нижнім амортизатором 10, на верхню поверхню якого спирається нижня баба 11; співвісно центральній осі молота розташовано циліндр, в якому розміщений плунжер 12, верхній торець якого стикається з нижньою плитою 9. 55 1 UA 102563 C2 В статичному положенні баби нерухомі; площі перерізів бічних плунжерів 4 і нижніх плунжерів 8 розраховуються по залежностях gm в gm н , (1) fв , fн 2Pв 2Pв де g - прискорення вільного падіння; 5 10 15 20 mв ,mн - маси верхньої і нижньої баб; Pв - тиск рідини в гідравлічному баці вузла зв'язку баб; fв , fн - площі кожного з двох бічних і двох нижніх плунжерів вузла гідрозв'язку баб. З (1) знаходимо співвідношення fв mв m (2) , fн fв н fн mн mв Молот безшаботний гідравлічний вертикальний працює таким чином: у вихідному положенні, яке показане на кресленні, баба 1 займає крайнє верхнє положення, а нижня баба 11 - крайнє нижнє. Прямий холостий рух, який закінчується ударом, забезпечується подачею робочої рідини (мінеральне масло або водяна емульсія) в верхні порожнини циліндрів 6 і в циліндр однобічної дії, в якому знаходиться плунжер 12. В кінці фази навантаження удару баби повинні зупинитися, це можливо, якщо у момент зіткнення баби матимуть однакову кількість руху, тобто (3) mв Vв mн Vн , де mв , Vв - маса і швидкість верхньої баби; mнVн - маса і швидкість нижньої баби. Однакову кількість руху баб можна забезпечити, якщо до кожної баби прикласти однакові імпульси сил, тобто (4) Pt mв Vв ;Pt mн Vн ; де P t - сила, що діє, і час її дії. Силу Р, що діє на кожну бабу, можна виразити як P 2(Pp Pc )Fк PFп , (5) де Pp - робочий тиск рідини приводу молота; 25 30 35 Pc - тиск зливу рідини в наповнювальний бак; Fк - кільцева площа поршня 5; Fп - площа поперечного перерізу плунжера 12. Зворотний рух виконується за рахунок подачі робочої рідини в нижні порожнини циліндрів 6, сила, яку створює тиск рідини на кільцеві площі поршнів 6, направлена вгору, баба 1 починає рух вгору, що призводить до зниження тиску рідини в гідравлічному баці 7 і руху вниз нижньої баби. Для запобігання виникненню вакууму в гідробаці, автори роботи [3] рекомендують підпорядковувати величину сили, що діє з боку приводу на одну з баб, такої залежності (6) P g(mн mв ) / 2 , прийнявши на знак рівності і з урахуванням (5), знаходимо залежності для розрахунку кільцевої площі поршня 6 Fк g(mн mв ) /[ 4(Pp Pc )] (7) і площі плунжера 12 Fп g(mн mв ) /(2P) або (8) Fп 2Fк (Pp Pc ) / P . Для забезпечення умови нерозривності потоку рідини в гідравлічному баці повинне виконуватися співвідношення (9) Vв fв Vнfн , з (4) маємо залежності Vв Pt , Vн Pt , і після підстановки fв і fн з (1) mв mн залежність (7) матиме вигляд Pt gmв Pt gmн , (10) mв p mн p 2 UA 102563 C2 5 і після спрощень маємо тотожність Ptg Ptg , p p яке підтверджує, що умова нерозривності потоку виконується. На основі рівнянь (3), (4) знаходимо такі співвідношення: m m Vн Vв в , н в в , mн mн (11) m Sн Sв в , mн де в, н - прискорення руху верхньої і нижньої баб; Sн, Sв - переміщення верхньої і нижньої баб. Сумарне переміщення баб визначатиметься як 10 m (12) H Sв Sн або H Sв 1 в mн Параметри прямого холостого руху, який закінчується ударом, визначаються на основі прискорення руху верхньої баби в н 2(Pp Pc )Fк 0,08mв g/ mв , (13) де 0,08mвg - сила тертя в напрямних баби і ущільненнях бічних плунжерів, узята з врахуванням даних роботи [4]. Час прямого холостого руху верхньої баби (14) t н 2S в / в н , швидкість верхньої баби на початку удару (15) Vв в н t н , енергія удару 2 Vв m (16) 1 в . 2 mн Після удару починається зворотний холостий рух баб. Робоча рідина від приводу молота подається в нижні порожнини циліндрів 6, верхні порожнини циліндрів 6 і циліндр плунжера 12 з'єднуються із зливом. Рівняння руху баб матиме наступний вигляд 2PpFк Pc (2Fк Fп ) вmв нmн Fт ,(17) L mв 15 20 де Fm - сила тертя у направляючих баб і ущільненнях плунжерів і поршнів, з врахуванням рекомендацій, приведених в роботі [4], силу тертя можна визначати по залежності (18) Fт 0,16 mвg , з урахуванням (11) і (18) залежність (17) набирає вигляду 2PpFк Pc (2Fк Fп ) 2 вmв 0,16mв g ,(19) з (19) знаходимо залежність для визначення прискорення зворотного холостого ходу баби 1 після удару на ділянці прискореного руху в п 2PpFк Pc (2Fк Fп ) 0,16mв g / 2mв .(20) Задавшись величиною відрізка прискореного зворотного холостого руху верхньої баби 1 (Sвп), визначаємо час руху 25 30 (21) t в п 2Sв п / в п , за цей час верхня баба набуде швидкість (22) Vв п в п t в п . Для зупинки баб в крайніх положеннях нижні порожнини циліндрів 6 відключаються від магістралі високого тиску і з'єднуються із зливом, верхні порожнини циліндрів 6 і циліндр, в якому розміщений плунжер 12, відключаються від зливу і з'єднуються з магістраллю високого тиску, починається процес гальмування баб. Рівняння руху баб при гальмуванні матиме вигляд Pp (2Fк Fп ) 2PcFк Fт вmв нmн , (23) враховуючи (11) і (18), знаходимо залежність для визначення прискорення баби 1 при гальмуванні вт [P(2Fв Fп ) 2PcFк 0,16mвg] /(2mв ) (24) час гальмування визначається як 3 UA 102563 C2 5 10 15 (25) t в т Vв п / в m , за час гальмування верхня баба пройде відстань (26) Sв m Vв n t в m / 2 . Час прискореного руху і час гальмування визначають час зворотного холостого ходу баб (27) tв tв n tв m, а сума переміщень при прискореному русі і гальмуванні повинна дорівнювати повному ходу верхньої баби (28) Sв Sв n Sв m , якщо рівняння (28) не виконується, то при більшій правій частині рівняння (28) необхідно зменшити відрізок руху верхньої баби з прискоренням Sв n , рішення повторити, починаючи з рівняння (21); якщо права частина рівняння (28) менше лівої частини, необхідно збільшити відрізок прискореного руху Sв n і рішення повторити. Час подвійного руху баб визначиться сумою часу прямого холостого руху і часу зворотного холостого руху, тобто (29) t в t н t в , кількість подвійних ходів за хвилину n 60 / t дв ход / хв. . Приклад конкретного виконання. Вихідні дані: сума мас верхньої баби, верхніх амортизаторів, перехідних плит, бічних плунжерів і поршнів складає mв 4 10 4 кг ; сума мас нижньої баби, амортизатора, перехідної плити і нижніх бічних плунжерів, складає 20 mн 5 10 4 кг ; сумарний (повний) хід баб H 18 м ; , повний хід верхньої баби Sв 10 м ; , повний хід нижньої баби; Sн 0,8 м ; тиск робочої рідини Pp 32 МПа ; 25 тиск зливу Pс 0,6 МПа ; тиск рідини в гідравлічному баку зв'язку баб Pв 16 МПа . Площі перерізів бічних плунжерів fв і нижніх плунжерів fн , на яких спираються баби, визначаються по залежності (1) fв (9,8 4 10 4 ) /( 2 16 10 6 ) 1 23 10 2 м2 (123 см2 ) , , 30 fн (9,8 4 10 4 ) /( 2 16 10 6 ) 153 10 2 м2 (123 см2 ) , , діаметри плунжерів дорівнюватимуть: верхніх - dв 0,125 м(12,5 см) , нижніх - dн 0,14 м(14 см) . Кільцева площа поршня 5 визначається по залежності (7) Fк 9,8( 4 10 4 5 10 4 ) /[ 4 (32 10 6 0,6 10 6 )] 0,73 10 2 м2 , діаметр поршня 5 визначається як 35 d 4( fв Fк ) / d 4(123 10 2 0,7 10 2 ) / 3,14 0,157 м(15,7 см) . , Площа перерізу плунжера 12 визначається по залежності (8) 40 Fп 9,8( 4 10 4 5 10 4 ) /( 2 32 10 6 ) 138 10 2 м2 , , діаметр плунжера dп 0,133 м(13,3 см) , прискорення прямого холостого руху верхньої баби визначиться по (13) в н [2(32 10 6 0,6 10 6 ) 0,7 10 2 0,08 4 10 4 9,8] /( 4 10 4 ) 10,2 м / с 2 , час прямого холостого руху верхньої баби визначиться по (14) t н 2 10 / 10,2 0,443 с , , швидкість верхньої баби на початку удару по (15) 4 UA 102563 C2 Vв 10,2 0,443 4,52 м / с , енергія удару молота визначається по залежності (16) 5 10 15 20 25 30 35 40 45 50 55 L 4 10 4 4,52 2 (1 4 10 4 / 5 10 4 ) / 2 735 Кж . Після удару починається зворотний холостий рух. Прискорення верхньої баби на початку руху розраховується по залежності (20) в п [2 32 10 6 0,7 10 2 0,6 10 6 (2 0,7 10 2 1387 10 2 ) 0,16 4 10 4 9,8] /( 2 4 10 4 ) 4,6 м / с 2 , , задавшись величиною відрізка прискореного зворотного руху верхньої баби, по (21) визначаємо час прискореного руху t в п 2 0,70 / 4,6 0,55 с , а по (22) визначається швидкість руху, яку набуде баба за цей час Vвп 4,6 0,55 2,54 м / с . Прискорений рух закінчився, починається процес гальмування. Верхні порожнини циліндрів 6 і циліндр плунжера 12 з'єднуються з магістраллю високого тиску, нижні порожнини циліндрів 6 з'єднується із зливною магістраллю. Прискорення руху верхньої баби при гальмуванні визначається по (24) в п [32 10 6 (2 0,7 10 2 137 10 2 ) 2 0,6 10 6 0,7 10 2 0,16 4 10 4 9,8] /( 2 4 10 4 11,76 м / с , , час гальмування визначиться по (25) t вm 2,54 / 1176 0,22 c , , за час гальмування верхня баба пройде відстань, яка визначається по (26) Sвm 2,54 0,22 / 2 0,28 м , час зворотного холостого руху баб визначається по (27) і є сумою часу прискореного руху і часу гальмування t в 0,55 0,22 0,77 с . Сума переміщень верхньої баби при прискореному русі і гальмуванні (27) дорівнює Sв 0,7 0,28 0,98 м . Згідно з вихідними даними максимальний хід верхньої баби Sв 10 м дорівнює один метр; , отриманий результат Sв 0,98 м можна вважати задовільним. Час подвійного ходу баб визначаємо по (29) t в 0,44 0,77 121с . , Число подвійних ходів за хвилину т 60 / 121 49 ход / хв. , Економічний ефект досягається за рахунок підвищення надійності і довговічності гідравлічного бака і ущільнень плунжерів в результаті стабільності тиску рідини в гідравлічному баці при прямому холостому русі і в процесі удару, зниження тиску при зворотному русі. Джерела інформації: 1. Патент №19623 Україна, МПК B21j 7/00. Безшаботний вертикальний молот /Монятовський С.С., Рей Р.І., Гутько Ю.І. № u 200607886; Заявлено 15.12.06; Опубл. 15.12.06, Бюл. № 12. 2. Рей А.Р. Влияние жесткости узла гидросвязи на некоторые параметры бесшаботного молота /А.Р.Рей, Р.И.Рей// Ресурсозберігаючі технології виробництва та обробки тиском матеріалів у машинобудуванні: Зб. Наук. пр. - Луганськ: Вид-цтво СНУ ім. В.Даля, 2009. – С.177182. 3. Патент №30386 Україна, МПК B21j 7/00. Безшаботний вертикальний гідравлічний молот / Рей А.Р. № u 200711834; Заявлено 29.10.07. Опубл. 25.02.08, Бюл. № 4. 4. Рей Р.И. Трение в уплотнениях и направляющих падающих частей кузнечных молотов / Р.И.Рей, В.И.Сумской, Т.С.Сушкова // Ресурсосберегающие технологии производства и обработки давлением материалов в машиностроении: Зб. Наук. пр. - Луганськ: Вид-цтво СНУ им. В.Даля, 2005. - с. 107-111. ФОРМУЛА ВИНАХОДУ Молот безшаботний гідравлічний вертикальний, який містить бак гідравлічного зв'язку верхньої та нижньої баб, верхню бабу, що спирається на верхні амортизатори, які встановлені на верхні перехідні плити, що спираються на бічні плунжери, на яких закріплені поршні гідравлічних привідних циліндрів, що встановлені на верхній поверхні бака гідравлічного зв'язку баб, та нижню бабу, який відрізняється тим, що в баці гідравлічного зв'язку баб симетрично вертикальній осі молота розташовано два плунжери, на які спирається нижня перехідна плита, 5 UA 102563 C2 5 нижній амортизатор і нижня баба, при цьому співвісно центральній осі молота розташовано циліндр, в якому розміщено привідний плунжер, верхній торець якого стикається з нижньою перехідною плитою, причому кільцеві площі поршнів, закріплених на бічних плунжерах, підпорядковуються залежності: Fk g(mв mн ) /[ 4(Pp Pc )] , де g - прискорення вільного падіння; mв , mн - маси верхньої і нижньої баб; Pp ,Pc - тиск робочої рідини і тиск зливу; 10 а площа поперечного перерізу привідного плунжера визначається як Fn 2Fk (Pp Pc ) / Pp , при цьому відношення площ поперечних перерізів плунжерів, на які спираються баби, дорівнює відношенню мас баб, тобто fв / fн mв / mн , де f в , f н площі поперечних перерізів плунжерів, на які спираються верхня і нижня баби. 15 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюHydraulic vertical no-anvil hammer
Автори англійськоюRei Anton Romanovych, Reiner Berger
Назва патенту російськоюМолот бесшаботный гидравлический вертикальный
Автори російськоюРей Антон Романович, Райнер Бергер
МПК / Мітки
МПК: B21J 7/00
Мітки: гідравлічний, молот, безшаботний, вертикальний
Код посилання
<a href="https://ua.patents.su/8-102563-molot-bezshabotnijj-gidravlichnijj-vertikalnijj.html" target="_blank" rel="follow" title="База патентів України">Молот безшаботний гідравлічний вертикальний</a>
Безшаботний вертикальний гідравлічний молот
Номер патенту: 30386
Опубліковано: 25.02.2008
Автор: Рей Антон Романович
МПК: B21J 7/00
Мітки: гідравлічний, безшаботний, молот, вертикальний
Формула / Реферат:
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером та бак гідравлічного зв'язку верхньої і нижньої баб, який відрізняється тим, що на верхню поверхню бака гідравлічного зв'язку верхньої і нижньої баб, співвісно з боковими плунжерами, встановлені привідні гідравлічні циліндри, поршні яких...
Молот безшаботний гідравлічний вертикальний
Номер патенту: 41181
Опубліковано: 12.05.2009
Автори: Рей Мирослава Романівна, Рей Антон Романович
МПК: B21J 17/00
Мітки: гідравлічний, молот, вертикальний, безшаботний
Формула / Реферат:
Молот безшаботний гідравлічний вертикальний, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером та бак гідравлічного зв'язку верхньої та нижньої баб, який відрізняється тим, що на верхню поверхню бака гідравлічного зв'язку верхньої і нижньої баб, співвісно з боковими плунжерами, встановлені привідні гідравлічні циліндри однобічної дії,...
Безшаботний вертикальний гідравлічний молот
Номер патенту: 35920
Опубліковано: 10.10.2008
Автори: Рей Антон Романович, Рей Роман Іванович
МПК: B21J 7/00
Мітки: вертикальний, молот, безшаботний, гідравлічний
Формула / Реферат:
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером, гідравлічний бак зв'язку верхньої та нижньої баби, який відрізняється тим, що нижня частина центрального плунжера, яка має площу перерізу, меншу за верхню частину, проходить через отвір в нижній частині гідравлічного бака і розміщується в...
Безшаботний вертикальний гідравлічний молот
Номер патенту: 35919
Опубліковано: 10.10.2008
Автори: Рей Мирослава Романівна, Рей Антон Романович
МПК: B21J 7/00
Мітки: молот, гідравлічний, безшаботний, вертикальний
Формула / Реферат:
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером, гідравлічний бак зв'язку верхньої та нижньої баби, який відрізняється тим, що всі три плунжери виготовлені у вигляді ступінчатих циліндрів, нижні частини яких мають площі перерізів, менші за площі перерізів верхніх частин, гідравлічний бак в...
Молот безшаботний гідравлічний вертикальний
Номер патенту: 102022
Опубліковано: 27.05.2013
Автори: Рей Антон Романович, Рей Роман Іванович
МПК: B21J 7/28
Мітки: гідравлічний, вертикальний, молот, безшаботний
Формула / Реферат:
Безшаботний молот, що містить гідравлічний бак зв'язку баб, верхню бабу, яка спирається на верхні амортизатори, що встановлені на перехідні плити, які спираються на бокові плунжери, на яких закріплені поршні гідравлічних приводних циліндрів, що встановлені на верхній поверхні баку гідравлічного зв'язку баб, та нижню бабу, яка спирається на нижній амортизатор, що встановлений на перехідну плиту, яка спирається на центральний плунжер, який...
Попередній патент: Пристрій для одержання механічної роботи від джерела нетеплової енергії
Наступний патент: Сингулярний спосіб забезпечення безаварійного руху транспортного засобу в аварійних ситуаціях
Випадковий патент: Спосіб запису інформації та пристрій для його здійснення