Механічний перемикальний контакт

Формула / Реферат
1. Механічний перемикальний контакт (10) для силового ступеневого перемикача ступеневого трансформатора, що містить раму або корпус (30), принаймні два виконані із можливістю переміщення між двома кінцевими положеннями, електропровідно сполучені один із іншим, контактні пальці (12, 14) або пакети контактних пальців, кожен з яких за допомогою багатоплечих шарнірів (16) активно сполучений із обертовим перемикальним валом (18), який сполучений із обертовими напрямними кулісами (24) для приведення в дію багатоплечих шарнірів (16) і пов'язаного з цим відхилення контактних пальців (12, 14) чи пакетів контактних пальців, який відрізняється тим, що контактні пальці (12, 14) чи пакети контактних пальців виконані з можливістю приведення в дію незалежно від напрямку обертання перемикального вала (18), який при повторюваних обертальних рухах спричиняє аналогічні хитальні рухи обох контактних пальців (12, 14) чи пакетів контактних пальців.
2. Механічний перемикальний контакт за п. 1, який відрізняється тим, що обидва контактні пальці (12, 14) чи пакети контактних пальців, виконані з можливістю відхилення, розміщені на електропровідній спільній осі (20), при цьому кожному з обох виконаних з можливістю відхилення контактних пальців (12, 14) чи пакетів контактних пальців відповідає окремий механічний електропровідний упор (26, 28) для утворення відповідних кінцевих положень, а спільна вісь (20) орієнтована паралельно обертовому перемикальному валу (18).
3. Механічний перемикальний контакт за п. 1 або 2, який відрізняється тим, що перший контактний палець (12) чи перший пакет контактних пальців у першому кінцевому положенні механічного перемикального контакту (10) прилягає до відповідного йому електропровідного механічного упора (26) і утворює електропровідне з'єднання між електропровідною спільною віссю (20) і упором (26), в той час як другий контактний палець (14) чи другий пакет контактних пальців відведений від відповідного йому електропровідного механічного упора (28).
4. Механічний перемикальний контакт за будь-яким із пунктів 1-3, який відрізняється тим, що перший контактний палець (12) чи перший пакет контактних пальців у другому кінцевому положенні механічного перемикального контакту (10) відведений від відповідного йому електропровідного механічного упора (26), у той час як другий контактний палець (14) чи другий пакет контактних пальців прилягає до відповідного йому електропровідного механічного упора (28) і утворює електропровідне з'єднання між електропровідною спільною віссю (20) і упором (28).
5. Механічний перемикальний контакт за п. 4, який відрізняється тим, що обидва контактних пальці (12, 14) чи пакети контактних пальців механічно сполучені між собою і виконані з можливістю приведення в дію або відхилення, а разом із тим перемикання з затримкою один відносно іншого.
6. Механічний перемикальний контакт за будь-яким із пп. 1-5, який відрізняється тим, що кожна із напрямних куліс (24) розміщена в сполученому без можливості обертання з перемикальним валом (18) кулачковому диску (22а, 22b, 22с) і з можливістю напрямлення та відхилення відповідного керувального штифта (36) кожного з багатоплечих шарнірів (16).
7. Механічний перемикальний контакт за п. 6, який відрізняється тим, що нерухомо закріплене одним кінцем на рамі чи корпусі (30) перше плече (32) кожного багатоплечого шарніра (16) сполучене з переміщуваним ковзанням у напрямній кулісі (24) штифтом (36), а його вільний кінець (38) сполучений з другим плечем (34), яке з можливістю відхилення входить у зачеплення з контактним пальцем (12, 14) чи пакетом контактних пальців.
8. Механічний перемикальний контакт за п. 7, який відрізняється тим, що штифт (36) розміщений між точкою (40) нерухомого кріплення до рами чи корпусу (30) та вільним кінцем (38) першого плеча (32).
Текст
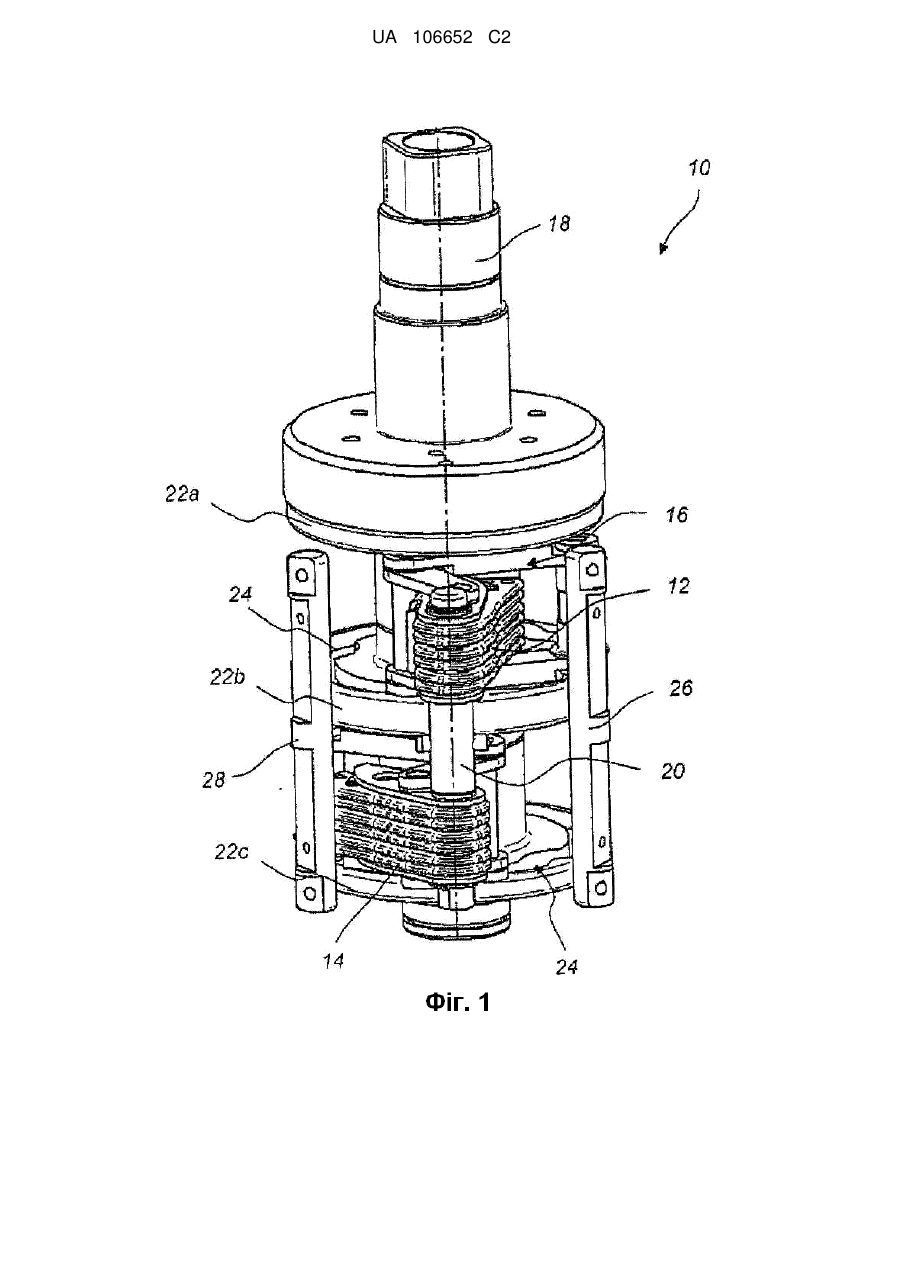
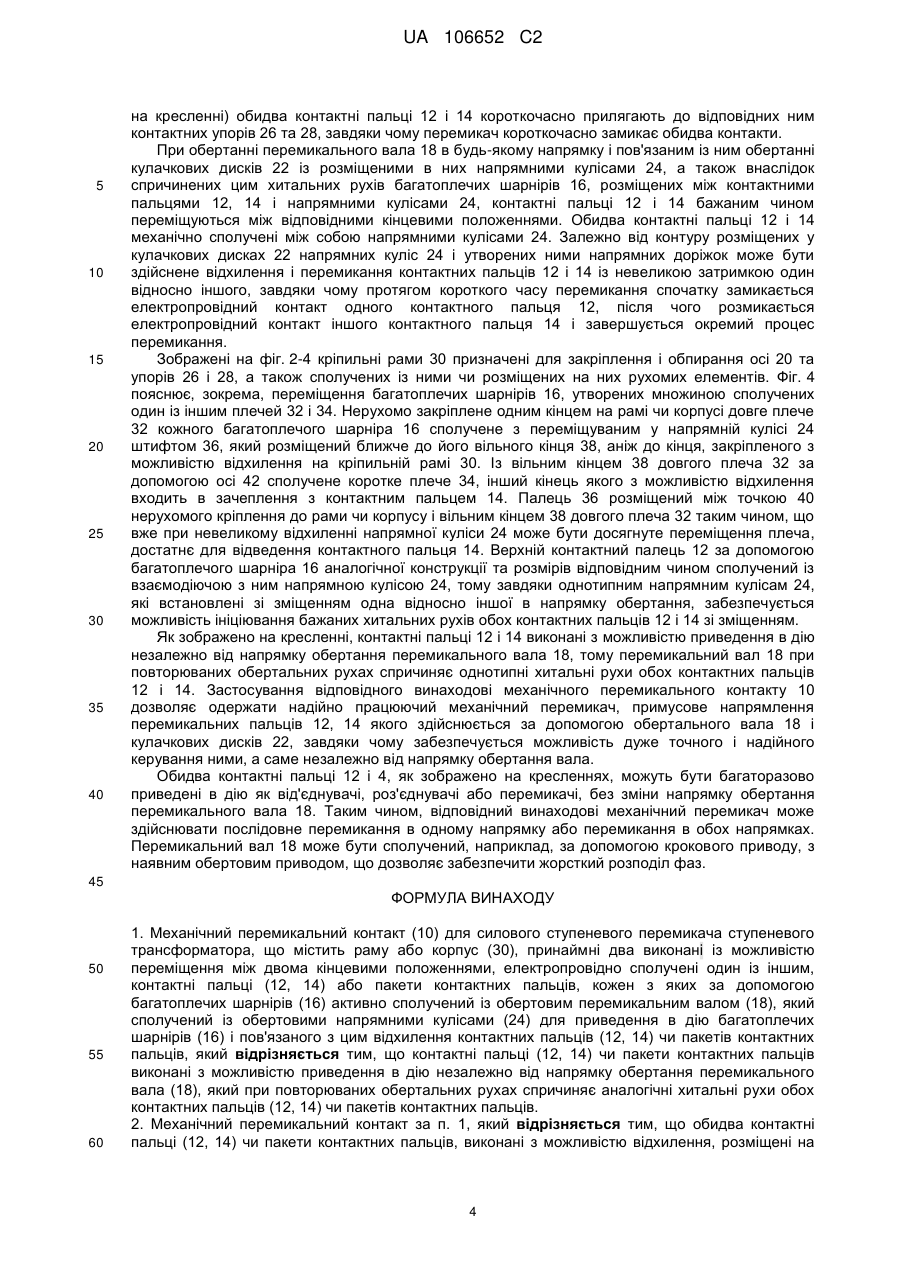
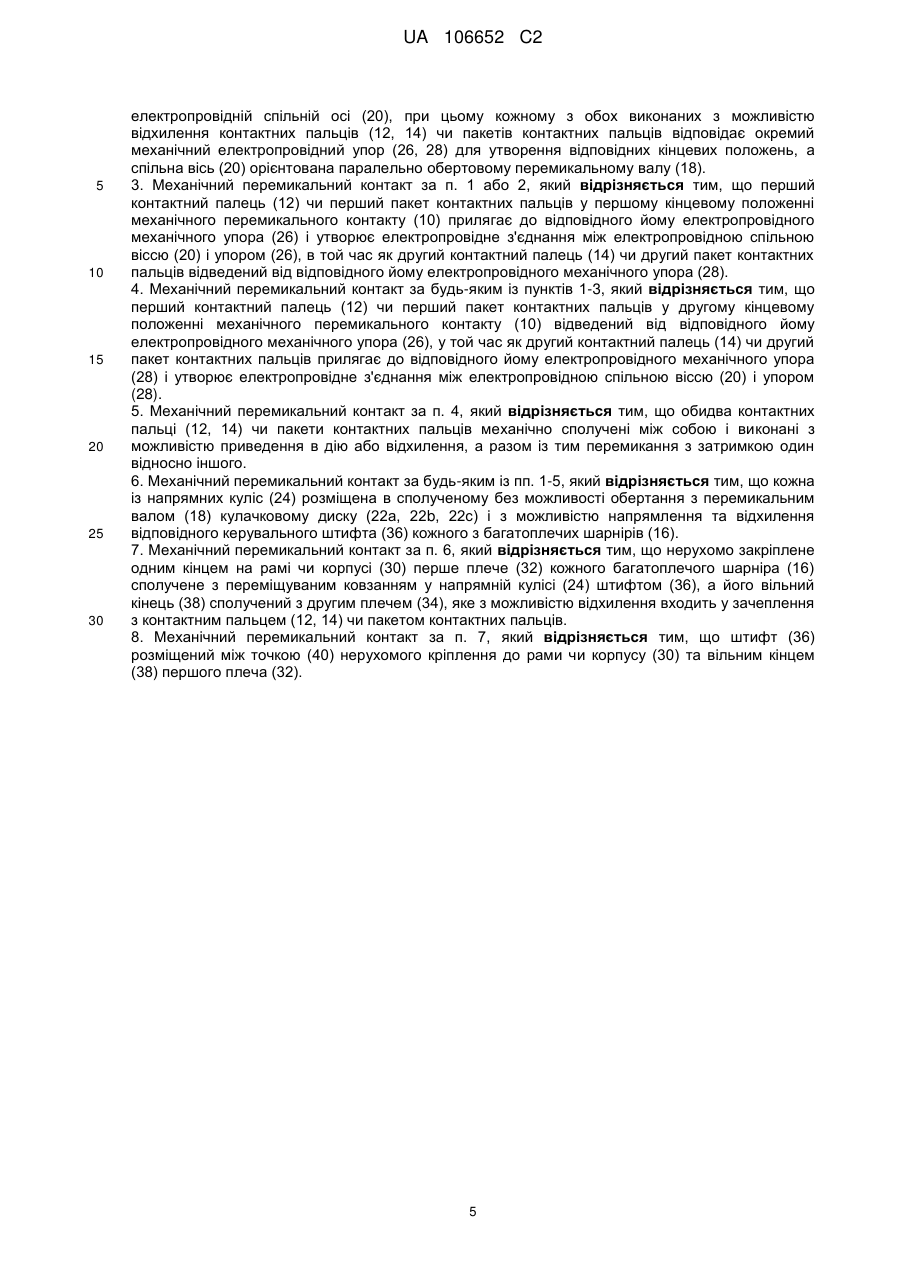
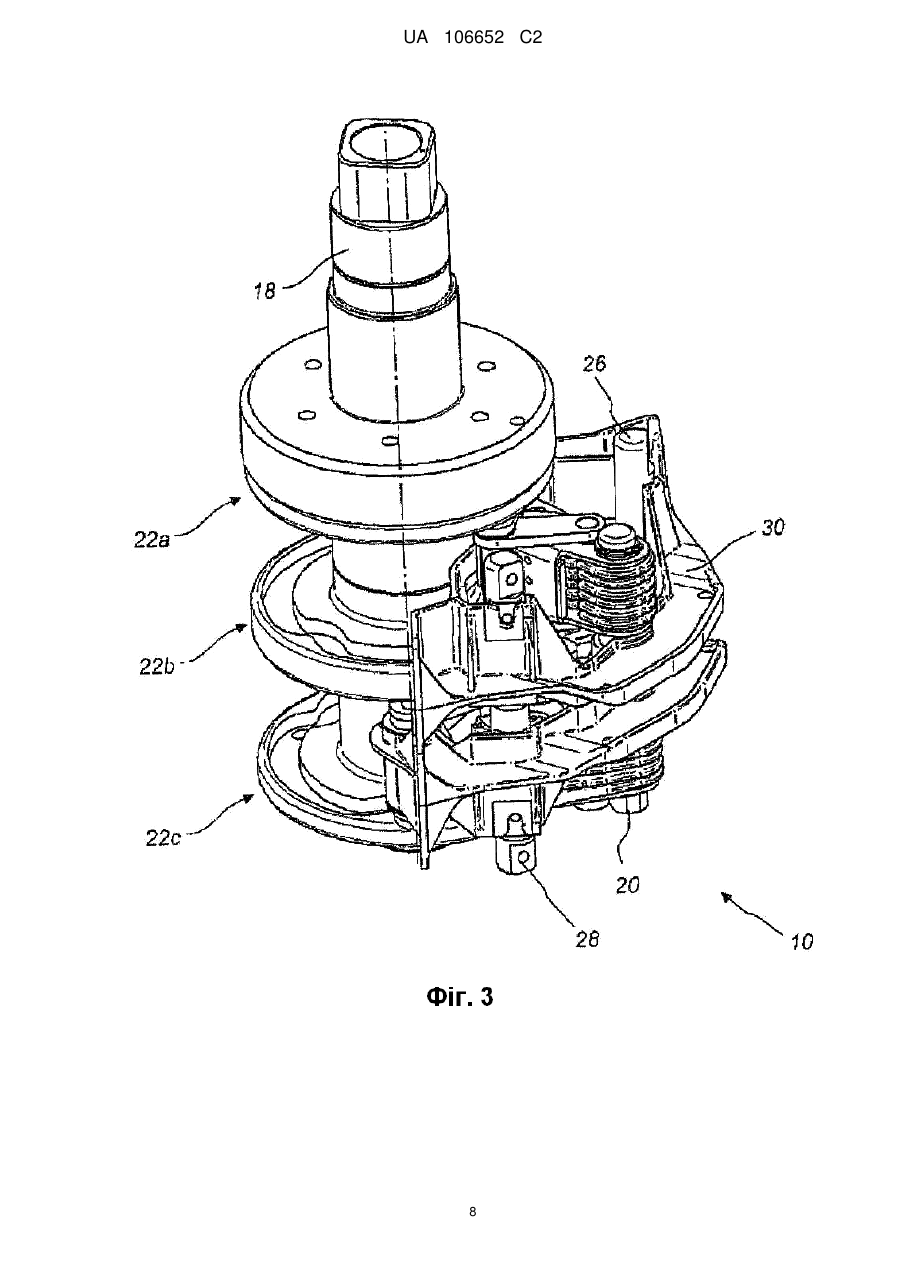
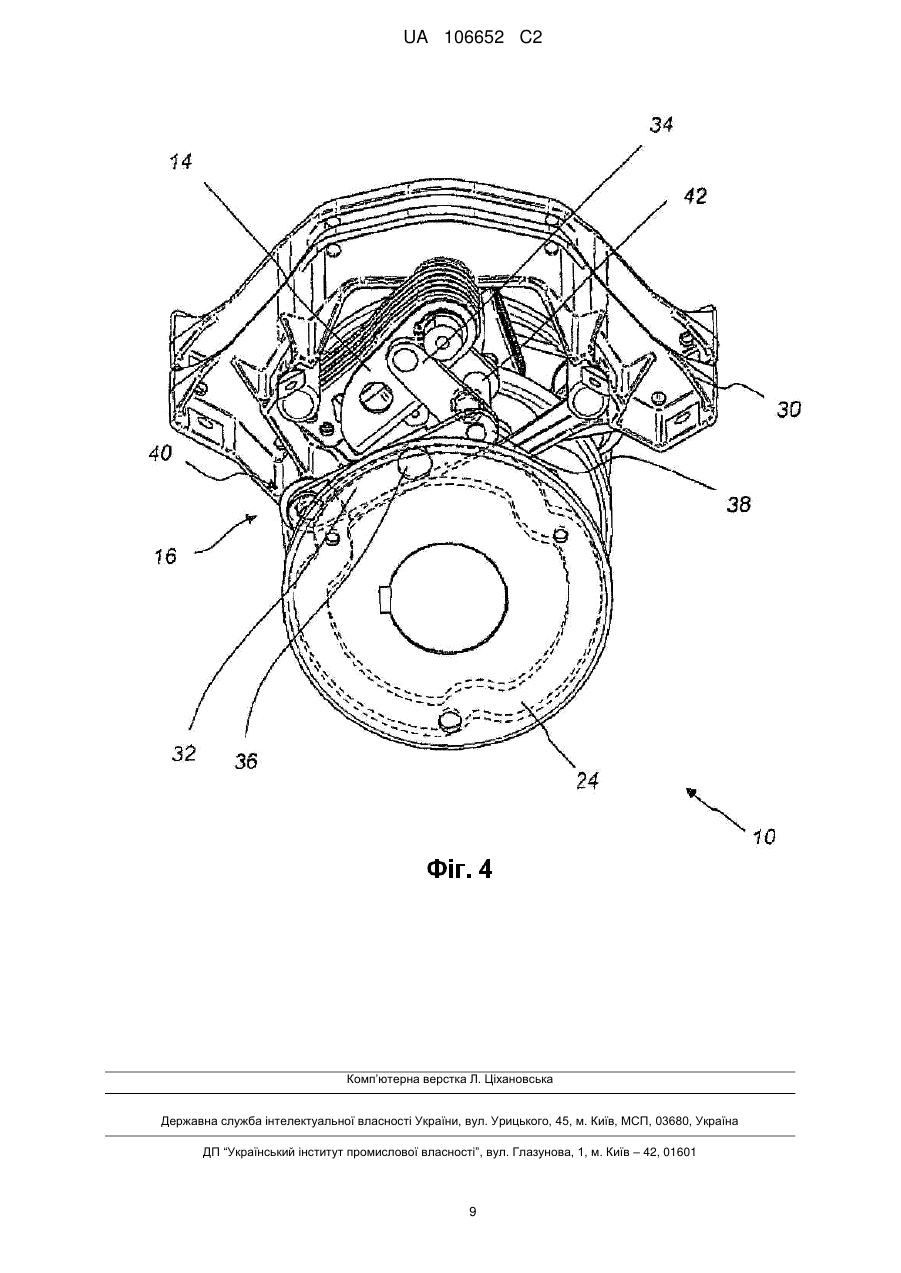
Реферат: Винахід стосується механічного перемикального контакту (10) для відключення, роз'єднання або перемикання, зокрема силового ступеневого перемикача ступеневого трансформатора, який містить принаймні два виконаних із можливістю здійснення хитальних рухів між двома кінцевими положеннями, електропровідно сполучених один із іншим контактних пальців (12, 14) або пакетів контактних пальців, кожен із яких за допомогою багатоплечих шарнірів (16) активно сполучений з обертовим перемикальним валом (18), який сполучений із обертовими напрямними кулісами (24) для приведення в дію багатоплечих шарнірів (16) і пов'язаного з цим відхилення контактних пальців (12, 14) або пакетів контактних пальців. UA 106652 C2 (12) UA 106652 C2 UA 106652 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід стосується механічного перемикального контакту для перемикання або відключення чи розмикання електричного контакту, зокрема в силовому перемикачі ступеневого перемикача з ознаками незалежного пункту формули винаходу. Відомі силові перемикачі для ступеневих перемикачів регулювальних трансформаторів містять так званий швидкодіючий резистивний перемикач, керування валами перемикальних контактів якого здійснюється за допомогою кулачкового приводу, для приведення в дію якого використовують енергоакумулятор. При цьому кулачковий диск здійснює хитний рух шляхом переміщення між двома кінцевими положеннями, а саме незалежно від напрямку переміщення селектора. Це означає, що контакти, які при здійсненні обертання в одному напрямку кулачкового диска, замикаються першими і розмикаються першими при здійсненні обертання в зворотному напрямку. Контакти, які розмикалися першими при здійсненні обертання в тому самому напрямку, при здійсненні обертання в зворотному напрямку замикаються останніми. У публікації DE 100 50 821 С1 описаний механічний перемикальний контакт для двохполюсного розмикання ступеневого перемикача. Перемикальний контакт містить несучий елемент із ізоляційного матеріалу, на якому розміщені нерухомі контакти, виконані в формі опуклих контактних площадок. Крім цього, на несучому елементі з ізоляційного матеріалу розміщений з можливістю відхилення контактотримач, який сполучений із виконаним із можливістю відхилення на певний кут хитним кронштейном. На вільному кінці хитного кронштейна закріплений контактний елемент, на обох кінцях якого встановлені контактні ролики. Ці контактні ролики забезпечують можливість підключення нерухомих контактів на вибір. Залежно від положення хитного кронштейна контактні ролики дотикаються опуклої поверхні розміщених відповідно навпроти них горизонтально нерухомих контактів і таким чином утворюють електричні контактні з'єднання. Інший механічний перемикальний контакт для силового ступеневого перемикача відомий із публікації WO 2007/042088 А1. Цей механічний перемикальний контакт також містить несучий елемент із ізоляційного матеріалу, на якому розміщені нерухомі, виконані з можливістю підключення контакти. Окрім цього, на несучому елементі з ізоляційного матеріалу розміщений з можливістю обертання перемикальний важіль, один із вільних кінців якого сполучений із хитним кронштейном, а другий - із керувальним контуром. Перемикальний важіль виконаний із можливістю стрибкоподібного переміщення з одного з обох стаціонарних станів в інший стаціонарний стан у разі силової дії на керувальний контур. Додатково на несучому елементі розміщений виконаний з можливістю хитання відносно окремої опори контактний корпус, на якому розміщені два паралельних, електрично сполучених між собою контактних пальці, які з обох сторін охоплюють відповідно підключені нерухомі контакти. Контактний корпус механічно сполучений з перемикальним важелем і виконаний з можливістю приведення ним у дію. Крім цього, перемикальний важіль може бути оснащений повідком, який із геометричним замиканням входить із зачепленням в передбачений для нього отвір у контактному корпусі. Один із обох нерухомих контактів на вибір може бути виконаний у формі контактної шини, вздовж якої ковзають контактні пальці при переміщенні контактного корпусу. Спільним для механізмів приведення в дію відомих механічних контактів для перемикання силових ступеневих перемикачів є те, що перемикання здійснюється між двома кінцевими положеннями, тому необхідним є виконання хитальних перемикальних рухів. У публікації WO 89/03924 А описаний ступеневий пружинний привід для силового перемикача ступеневих перемикачів, пружинний енергоакумулятор якого виконаний із можливістю напруження за допомогою приводу, вал якого обертається або за годинниковою стрілкою, або проти годинникової стрілки, причому елемент, який приводиться в дію пружинним акумулятором в процесі перемикання, для переміщення контакту здійснює обертальний рух. Елементом для переміщення контакту може бути, наприклад, кулачковий диск або кулісний керувальний вузол. Пружинний акумулятор і ведений елемент сполучені з'єднувальним елементом, виконаним із можливістю обертання лише в одному напрямку незалежно від напрямку обертання приводу. Цей відомий ступеневий пружинний привід призначений для послідовного керування контактами і має бути придатним особливо для тиристорних силових перемикачів. У публікації DE1613646A1 описаний силовий перемикач з рухомими контактними елементами, кожен із яких за допомогою контактотримача сполучений з двоплечим важелем із можливістю переміщення. На двоплечому важелі закріплений контактний ролик. Він взаємодіє з криволінійним пазом на кулачковому диску. При обертанні вала, сполученого з кулачковим диском, контактний ролик переміщується по кривій, що спричиняє відхилення двоплечого важеля і разом із цим замикання чи розмикання контактних елементів. 1 UA 106652 C2 5 10 15 20 25 30 35 40 45 50 55 60 Задачею винаходу є розроблення надійно працюючого механічного перемикального контакту, який забезпечує надійне механічне та електричне контактування між двома кінцевими положеннями незалежно від напрямку обертання керуючого вала. Цю задачу винаходу вирішено у предметі незалежного пункту формули винаходу. Ознаки переважних вдосконалених форм виконання винаходу описані у залежних пунктах формули винаходу. Для вирішення цієї задачі згідно з винаходом запропонований механічний перемикальний контакт для замикання контактів, розмикання контактів та перемикання, який зокрема може бути застосований в силовому ступеневому перемикачі ступеневого трансформатора. Механічний перемикальний контакт містить принаймні два виконані з можливістю переміщення незалежно один від одного між двома кінцевими положеннями, електрично сполучені між собою контакти або контактні групи, або пакети контактних пальців, кожен із яких за допомогою багатоплечого шарніра активно сполучений із обертовим перемикальним валом, який взаємодіє з обертовими напрямними кулісами для приведення в дію багатоплечих шарнірів і пов'язаного із цим відхилення контактів або контактних груп. Цей відповідний винаходові механічний перемикальний контакт виконаний як від'єднувач або перемикач, який призначений для надійного перемикання і здатний витримувати великі механічні та електричні навантаження, наприклад у ступеневому трансформаторі. Обидва виконані з можливістю відхилення контакти або пакети контактних пальців при цьому переважно розміщені на спільній електропровідній осі, яка орієнтована паралельно обертовому перемикальному валу. Проте, контакти або контактні групи можуть бути розміщені також іншим чином, наприклад перпендикулярно осі. Крім цього, кожна/кожен із обох виконаних з можливістю відхилення контактних груп або пакетів контактних пальців взаємодіє з окремим механічним, електропровідним, виконаним у формі контакту упором для утворення відповідних кінцевих положень від'єднувача, роз'єднувача або перемикача. Відповідний винаходові механічний перемикальний контакт дозволяє одержати надійно працюючий електричний роз'єднувач або перемикач, примусове приведення в дію перемикальних пальців якого здійснюється за допомогою обертової кулачкової куліси або диска, завдяки чому забезпечується можливість дуже точного і надійного керування ними, а саме відповідно до виконання кулачка незалежно від напрямку обертання кулачкової куліси або диска. У багатьох випадках застосування особливо переважним є можливість застосування не хитного приводу, а обертального руху, в разі потреби навіть незалежного від напрямку переміщення для приведення в дію роз'єднувача або перемикача, як це здійснюється, наприклад, у відомих ступеневих або силових перемикачах, або аналогічних пристроях у галузі техніки великих струмів. Окрім цього, може бути передбачено, що перша контактна група або перший пакет контактних пальців у першому кінцевому положенні механічного перемикального контакту прилягає до відповідного електропровідного механічного упору і утворює електропровідне з'єднання між електропровідною спільною віссю та упором, у той час як друга контактна група або другий пакет контактних пальців відведений від взаємодіючого з ним електропровідного механічного упору. Завдяки незалежному відведенню обох пакетів контактних пальців можна забезпечити перемикальну дію без одночасного контактування з обома виводами, які мають бути підключені. Таким чином, у другому кінцевому положенні механічного перемикального контакту перший пакет контактних пальців відводиться від відповідного йому електропровідного механічного упора, в той час як другий пакет контактних пальців прилягає до відповідного йому електропровідного механічного упора і утворює електропровідне з'єднання між електропровідною спільною віссю та упором. За допомогою перемикального вала і сполучених із ним без можливості обертання дископодібних напрямних куліс, а також розміщених між пакетами контактних пальців і напрямними кулісами багатоплечих шарнірів забезпечується бажане переміщення пакетів контактних пальців між відповідними кінцевими положеннями. Таким чином обидва пакети контактних пальців на вибір механічно сполучені один із іншим. Залежно від профілю розміщених у дископодібних напрямних кулісах або кулачкових дисках напрямних доріжок забезпечується можливість відхилення і відповідного перемикання пакетів контактних пальців із невеликою затримкою один відносно іншого; таким чином, у процесі короткотривалого перемикання спочатку здійснюється замикання електропровідного контакту першого пакета контактних пальців перед розмиканням електропровідного контакта іншого пакета контактних пальців, і окремий процес перемикання завершується. Описаним чином забезпечується можливість приведення в дію пакетів контактних пальців або контактних груп незалежно від напрямку обертання перемикального вала, завдяки чому цей вал при повторюваних обертальних рухах може спричиняти в кожному випадку однотипні або 2 UA 106652 C2 5 10 15 20 25 30 35 40 45 50 55 60 перемінні хитальні рухи обох пакетів контактних пальців. Кожна із напрямних куліс переважно розміщена в сполученому без можливості обертання з перемикальним валом диску і напрямляє керувальний штифт відповідного багатоплечого шарніра, причому штифт виконаний з можливістю відхилення за допомогою відповідно сформованої обертової або напрямної куліси при обертанні дисків за допомогою перемикального вала. Згідно з одним із варіантів виконання винаходу нерухомо зафіксоване одним кінцем на рамі чи корпусі перше плече кожного багатоплечого шарніра може бути з'єднане зі штифтом, переміщуваним ковзанням у напрямній кулісі, а його вільний кінець може бути сполучений з другим плечем, яке з можливістю відхилення входить із зачепленням у контакт з контактним пальцем. Штифт розміщений переважно між нерухомо зафіксованим на рамі чи корпусі та вільним кінцями першого плеча, завдяки чому вже при невеликому відхиленні напрямної поверхні може бути забезпечене переміщення плеча, достатнє для відхилення відповідного пакета контактних штифтів. Обидва пакети контактних пальців або обидві контактні групи, як описано вище, виконані з можливістю багаторазового приведення в дію в різних варіантах як роз'єднувачі, від'єднувачі або перемикачі без зміни напрямку обертання перемикального вала. Таким чином, відповідний винаходові механічний вимикач або перемикач може багаторазово здійснювати послідовне перемикання в одному напрямку. Перемикальний вал може бути сполучений з наявним обертовим приводом, наприклад, за допомогою крокового приводу, що дозволяє забезпечити жорсткий розподіл фаз. Слід зауважити також, що відповідний вибір конструкції та розрахунок параметрів кулачкових куліс кулачкових дисків дозволяє досягти майже будь-якого кута перемикання та лінійної характеристики перемикання, стосовно як кута розхилу контактів, так і кута повороту привідного вала. Крім цього, у варіанті, який докладно в цьому тексті не описаний, передбачено застосування також придатної для реалізації трифазової схеми. У такій трифазовій схемі кілька пакетів контактних пальців можуть бути розміщені на спільних осях шарнірів таким чином, що вони розділяють відповідні осі шарнірів. Далі винахід докладніше пояснюється на прикладах виконання за допомогою креслень. На фіг. 1 в ізометричній проекції схематично зображений варіант виконання відповідного винаходові механічного перемикального контакту На фіг. 2 наведене інше зображення механічного перемикального контакту з фіг. 1 На фіг. 3 наведений інший вид перемикального контакту з фіг. 2 На фіг. 4 наведений третій вид перемикального контакту з фіг. 2 Описаний далі приклад виконання не слід розглядати як обмежувальний, цей опис наведений для пояснення принципу дії відповідного винаходові механічного перемикального контакту На фіг. 1-4 схематично зображений механічний перемикальний контакт 10, який може бути застосований для перемикання, зокрема, у силовому ступеневому перемикачі ступеневого трансформатора Зображений у прикладі виконання механічний перемикальний контакт 10 містить два виконаних із можливістю переміщення між двома кінцевими положеннями, сполучених один із одним електропровідних контактних пальці 12 і 14, кожен із яких за допомогою багатоплечого шарніра 16 активно сполучений із обертовим перемикальним валом 18 На перемикальному валу 18 над і під розміщеними з можливістю обертання на спільній електропровідній осі 20 контактними пальцями 12 і 14, а також між ними передбачено множину кулачкових дисків 22а, 22b, 22с, які призначені для напрямлення і переміщення багатоплечих шарнірів 16. Для цього кожен із кулачкових дисків 22а, 22b, 22с містить відповідну обертову напрямну кулісу 24, яка призначена для підведення багатоплечих шарнірів 16 та пов'язаного з цим відхилення контактних пальців 12 і 14. Зображений механічний перемикальний контакт 10 виконаний у формі перемикача чи від'єднувача, тому обидва виконані з можливістю відхилення контактні пальці 12 і 14 сполучені між собою електропровідним з'єднанням і розміщені на спільній осі 20. Вісь 20 орієнтована паралельно обертовому перемикальному валу 18. Крім цього, кожному з обох виконаних із можливістю відхилення контактних пальців 12 і 14 відповідає окремий механічний електропровідний упор 26 і 28 для утворення відповідних кінцевих положень перемикача. Таким чином, верхньому контактному пальцю 12 відповідає перший упор 26, до якого він прилягає в першому положенні перемикання з утворенням електропровідного з'єднання між віссю 20 і першим упором 26. Нижньому контактному пальцю 14 відповідає другий упор 28, до якого він прилягає в другому положенні перемикання з утворенням електропровідного з'єднання між віссю 20 і другим упором 28. У зображеному на фіг. 1-4 другому положенні перемикання перший контактний палець 12 відведений від першого упора 26, в той час як другий контактний палець 14 прилягає до другого упора 28. На відміну від цього, в процесі перемикання (не зображеному 3 UA 106652 C2 5 10 15 20 25 30 35 40 на кресленні) обидва контактні пальці 12 і 14 короткочасно прилягають до відповідних ним контактних упорів 26 та 28, завдяки чому перемикач короткочасно замикає обидва контакти. При обертанні перемикального вала 18 в будь-якому напрямку і пов'язаним із ним обертанні кулачкових дисків 22 із розміщеними в них напрямними кулісами 24, а також внаслідок спричинених цим хитальних рухів багатоплечих шарнірів 16, розміщених між контактними пальцями 12, 14 і напрямними кулісами 24, контактні пальці 12 і 14 бажаним чином переміщуються між відповідними кінцевими положеннями. Обидва контактні пальці 12 і 14 механічно сполучені між собою напрямними кулісами 24. Залежно від контуру розміщених у кулачкових дисках 22 напрямних куліс 24 і утворених ними напрямних доріжок може бути здійснене відхилення і перемикання контактних пальців 12 і 14 із невеликою затримкою один відносно іншого, завдяки чому протягом короткого часу перемикання спочатку замикається електропровідний контакт одного контактного пальця 12, після чого розмикається електропровідний контакт іншого контактного пальця 14 і завершується окремий процес перемикання. Зображені на фіг. 2-4 кріпильні рами 30 призначені для закріплення і обпирання осі 20 та упорів 26 і 28, а також сполучених із ними чи розміщених на них рухомих елементів. Фіг. 4 пояснює, зокрема, переміщення багатоплечих шарнірів 16, утворених множиною сполучених один із іншим плечей 32 і 34. Нерухомо закріплене одним кінцем на рамі чи корпусі довге плече 32 кожного багатоплечого шарніра 16 сполучене з переміщуваним у напрямній кулісі 24 штифтом 36, який розміщений ближче до його вільного кінця 38, аніж до кінця, закріпленого з можливістю відхилення на кріпильній рамі 30. Із вільним кінцем 38 довгого плеча 32 за допомогою осі 42 сполучене коротке плече 34, інший кінець якого з можливістю відхилення входить в зачеплення з контактним пальцем 14. Палець 36 розміщений між точкою 40 нерухомого кріплення до рами чи корпусу і вільним кінцем 38 довгого плеча 32 таким чином, що вже при невеликому відхиленні напрямної куліси 24 може бути досягнуте переміщення плеча, достатнє для відведення контактного пальця 14. Верхній контактний палець 12 за допомогою багатоплечого шарніра 16 аналогічної конструкції та розмірів відповідним чином сполучений із взаємодіючою з ним напрямною кулісою 24, тому завдяки однотипним напрямним кулісам 24, які встановлені зі зміщенням одна відносно іншої в напрямку обертання, забезпечується можливість ініціювання бажаних хитальних рухів обох контактних пальців 12 і 14 зі зміщенням. Як зображено на кресленні, контактні пальці 12 і 14 виконані з можливістю приведення в дію незалежно від напрямку обертання перемикального вала 18, тому перемикальний вал 18 при повторюваних обертальних рухах спричиняє однотипні хитальні рухи обох контактних пальців 12 і 14. Застосування відповідного винаходові механічного перемикального контакту 10 дозволяє одержати надійно працюючий механічний перемикач, примусове напрямлення перемикальних пальців 12, 14 якого здійснюється за допомогою обертального вала 18 і кулачкових дисків 22, завдяки чому забезпечується можливість дуже точного і надійного керування ними, а саме незалежно від напрямку обертання вала. Обидва контактні пальці 12 і 4, як зображено на кресленнях, можуть бути багаторазово приведені в дію як від'єднувачі, роз'єднувачі або перемикачі, без зміни напрямку обертання перемикального вала 18. Таким чином, відповідний винаходові механічний перемикач може здійснювати послідовне перемикання в одному напрямку або перемикання в обох напрямках. Перемикальний вал 18 може бути сполучений, наприклад, за допомогою крокового приводу, з наявним обертовим приводом, що дозволяє забезпечити жорсткий розподіл фаз. 45 ФОРМУЛА ВИНАХОДУ 50 55 60 1. Механічний перемикальний контакт (10) для силового ступеневого перемикача ступеневого трансформатора, що містить раму або корпус (30), принаймні два виконані із можливістю переміщення між двома кінцевими положеннями, електропровідно сполучені один із іншим, контактні пальці (12, 14) або пакети контактних пальців, кожен з яких за допомогою багатоплечих шарнірів (16) активно сполучений із обертовим перемикальним валом (18), який сполучений із обертовими напрямними кулісами (24) для приведення в дію багатоплечих шарнірів (16) і пов'язаного з цим відхилення контактних пальців (12, 14) чи пакетів контактних пальців, який відрізняється тим, що контактні пальці (12, 14) чи пакети контактних пальців виконані з можливістю приведення в дію незалежно від напрямку обертання перемикального вала (18), який при повторюваних обертальних рухах спричиняє аналогічні хитальні рухи обох контактних пальців (12, 14) чи пакетів контактних пальців. 2. Механічний перемикальний контакт за п. 1, який відрізняється тим, що обидва контактні пальці (12, 14) чи пакети контактних пальців, виконані з можливістю відхилення, розміщені на 4 UA 106652 C2 5 10 15 20 25 30 електропровідній спільній осі (20), при цьому кожному з обох виконаних з можливістю відхилення контактних пальців (12, 14) чи пакетів контактних пальців відповідає окремий механічний електропровідний упор (26, 28) для утворення відповідних кінцевих положень, а спільна вісь (20) орієнтована паралельно обертовому перемикальному валу (18). 3. Механічний перемикальний контакт за п. 1 або 2, який відрізняється тим, що перший контактний палець (12) чи перший пакет контактних пальців у першому кінцевому положенні механічного перемикального контакту (10) прилягає до відповідного йому електропровідного механічного упора (26) і утворює електропровідне з'єднання між електропровідною спільною віссю (20) і упором (26), в той час як другий контактний палець (14) чи другий пакет контактних пальців відведений від відповідного йому електропровідного механічного упора (28). 4. Механічний перемикальний контакт за будь-яким із пунктів 1-3, який відрізняється тим, що перший контактний палець (12) чи перший пакет контактних пальців у другому кінцевому положенні механічного перемикального контакту (10) відведений від відповідного йому електропровідного механічного упора (26), у той час як другий контактний палець (14) чи другий пакет контактних пальців прилягає до відповідного йому електропровідного механічного упора (28) і утворює електропровідне з'єднання між електропровідною спільною віссю (20) і упором (28). 5. Механічний перемикальний контакт за п. 4, який відрізняється тим, що обидва контактних пальці (12, 14) чи пакети контактних пальців механічно сполучені між собою і виконані з можливістю приведення в дію або відхилення, а разом із тим перемикання з затримкою один відносно іншого. 6. Механічний перемикальний контакт за будь-яким із пп. 1-5, який відрізняється тим, що кожна із напрямних куліс (24) розміщена в сполученому без можливості обертання з перемикальним валом (18) кулачковому диску (22а, 22b, 22с) і з можливістю напрямлення та відхилення відповідного керувального штифта (36) кожного з багатоплечих шарнірів (16). 7. Механічний перемикальний контакт за п. 6, який відрізняється тим, що нерухомо закріплене одним кінцем на рамі чи корпусі (30) перше плече (32) кожного багатоплечого шарніра (16) сполучене з переміщуваним ковзанням у напрямній кулісі (24) штифтом (36), а його вільний кінець (38) сполучений з другим плечем (34), яке з можливістю відхилення входить у зачеплення з контактним пальцем (12, 14) чи пакетом контактних пальців. 8. Механічний перемикальний контакт за п. 7, який відрізняється тим, що штифт (36) розміщений між точкою (40) нерухомого кріплення до рами чи корпусу (30) та вільним кінцем (38) першого плеча (32). 5 UA 106652 C2 6 UA 106652 C2 7 UA 106652 C2 8 UA 106652 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanical switch contact
Автори англійськоюHoepfl, Klaus, Wrede, Silke
Автори російськоюХёпфль Клаус, Вреде Сильке
МПК / Мітки
Мітки: механічний, контакт, перемикальний
Код посилання
<a href="https://ua.patents.su/11-106652-mekhanichnijj-peremikalnijj-kontakt.html" target="_blank" rel="follow" title="База патентів України">Механічний перемикальний контакт</a>
Механічний перемикальний контакт

Номер патенту: 91378
Опубліковано: 26.07.2010
Автори: Вреде Сільке, Клот Гюнтер
МПК: H01H 9/00
Мітки: перемикальний, механічний, контакт
Формула / Реферат:
1. Механічний перемикальний контакт для перемикання, зокрема, в силовому перемикачі, що містить ізоляційний носій (1), на якому розташовані нерухомі контакти (4, 5, 6), причому на ізоляційному носії (1) з можливістю повороту встановлено вмикаючу рукоятку (2), яка на одному з двох вільних кінців має поворотний важіль (22), а на іншому вільному кінці - маніпулятор (25), причому вмикаюча рукоятка (2) при навантаженні на маніпулятор (25)...
Механічний перемикальний контакт

Номер патенту: 72650
Опубліковано: 15.03.2005
Автори: Бертль Райнхольд, Клот Гюнтер, Пілльмаєр Леонхард
МПК: H01H 31/00, H01H 9/00
Мітки: механічний, контакт, перемикальний
Формула / Реферат:
1. Механічний перемикальний контакт для двополюсного перемикання, зокрема в силовому перемикачі ступеневого перемикача відводів трансформатора під навантаженням, який містить ізоляційний тримач (1), на якому попарно один навпроти іншого розміщені нерухомі контакти (4, 5; 6, 7), електропровідний контактний елемент (8), встановлений з можливістю хитання проти зусилля пружин (11,12) між двома положеннями навколо точки обертання таким чином, що...
Перемикальний пристрій

Номер патенту: 95680
Опубліковано: 25.08.2011
Автори: Хаммер Крістіан, Хубер Томас, Шмідбауер Альберт
МПК: H01F 29/04, H01H 1/44, H01H 1/56
Мітки: перемикальний, пристрій
Формула / Реферат:
1. Перемикальний пристрій з двома робочими положеннями для перемикання обмотки під час роботи трансформатора, причому при перемиканні прохідний струм комутується з однієї лінії на іншу лінію, причому для кожної фази передбачено принаймні один горизонтальний рівень, причому у кожному горизонтальному рівні навколо комутаційного вала, встановленого по центру і вертикально, на спільному корпусі із ізоляційного матеріалу встановлені нерухомі...
Двосторонній перемикальний блок

Номер патенту: 45651
Опубліковано: 25.11.2009
Автори: Мермер Ахамет, Лулечі Мустафа, Айдінонат Алі Різа, Акгун Ахмет
МПК: H04Q 1/00
Мітки: блок, перемикальний, двосторонній
Формула / Реферат:
1. Двосторонній перемикальний блок (2), з'єднаний з комутатором за допомогою елемента (1) для з'єднання з комутатором, для перемикання зв'язку, такого як з'єднання сплітерів (5) цифрової абонентської лінії (DSL) або з'єднання кабелів (7, 8), при цьому перемикальний блок (2) має принаймні одну перемикальну планку (4), яка має точки (14) приєднання кабелів і/або гнізда (9), причому перемикальна планка (4) з'єднана з перемикальним блоком (2),...
Перемикальний пристрій кулачкового контролера двобічної дії
Номер патенту: 75128
Опубліковано: 15.03.2006
Автори: Татарський Олексій Дмитрович, Човган Анатолій Дмитрович, Іванов Віктор Олексійович, Євлампієв Володимир Іванович
МПК: B60L 15/20
Мітки: перемикальний, двобічної, кулачкового, контролера, дії, пристрій
Формула / Реферат:
1. Перемикальний пристрій кулачкового контролера двобічної дії з розміщеними в корпусі контролера кулачковим валом та кулачковими шайбами, які взаємодіють з контактними елементами, який містить жорстко встановлений на валу храповик, який взаємодіє з фіксуючим елементом, та вільно встановлену перемикальну рукоятку, який відрізняється тим, що на кулачковому валу жорстко встановлений шків із закріпленими на його поверхні гнучкими зв'язками,...
Попередній патент: Спосіб формування анізотропної дрібнозеренної мікроструктури у порошках сплавів системи nd-fe-b
Наступний патент: Іммобілізація і контрольоване вивільнення ароматизатора, який входить до складу супрамолекулярного комплексу
Випадковий патент: Спосіб прогнозування ендотеліальної дисфункції у хворих на артеріальну гіпертензію з урахуванням поліморфізму генів