Перемикальний пристрій кулачкового контролера двобічної дії
Номер патенту: 75128
Опубліковано: 15.03.2006
Автори: Іванов Віктор Олексійович, Татарський Олексій Дмитрович, Човган Анатолій Дмитрович, Євлампієв Володимир Іванович
Формула / Реферат
1. Перемикальний пристрій кулачкового контролера двобічної дії з розміщеними в корпусі контролера кулачковим валом та кулачковими шайбами, які взаємодіють з контактними елементами, який містить жорстко встановлений на валу храповик, який взаємодіє з фіксуючим елементом, та вільно встановлену перемикальну рукоятку, який відрізняється тим, що на кулачковому валу жорстко встановлений шків із закріпленими на його поверхні гнучкими зв'язками, протилежні кінці яких жорстко закріплені на повідку рукоятки, розміщеному над охопленими гнучкими зв'язками роликами, осі яких встановлені на основі корпусу контролера по дужці кола концентрично і паралельно осі обертання вала.
2. Пристрій за п.1, який відрізняється тим, що гнучкі зв'язки обладнані натягувачами.
3. Пристрій за п.2, який відрізняється тим, що натягувачі гнучких зв'язків виконані у вигляді встановлених на основі корпусу підпружинених важелів натягу з роликами натягу.
4. Пристрій за п.1, який відрізняється тим, що шків на кулачковому валу закріплений за допомогою встановленого на валу хомута з додатковим болтом, який розміщено перпендикулярно стягуючому.
5. Пристрій за п.1, який відрізняється тим, що на основі корпусу контролера встановлені поворотні упори-ексцентрики для приведення у відповідність крайніх положень перемикальної рукоятки з фіксованими положеннями храповика.
Текст
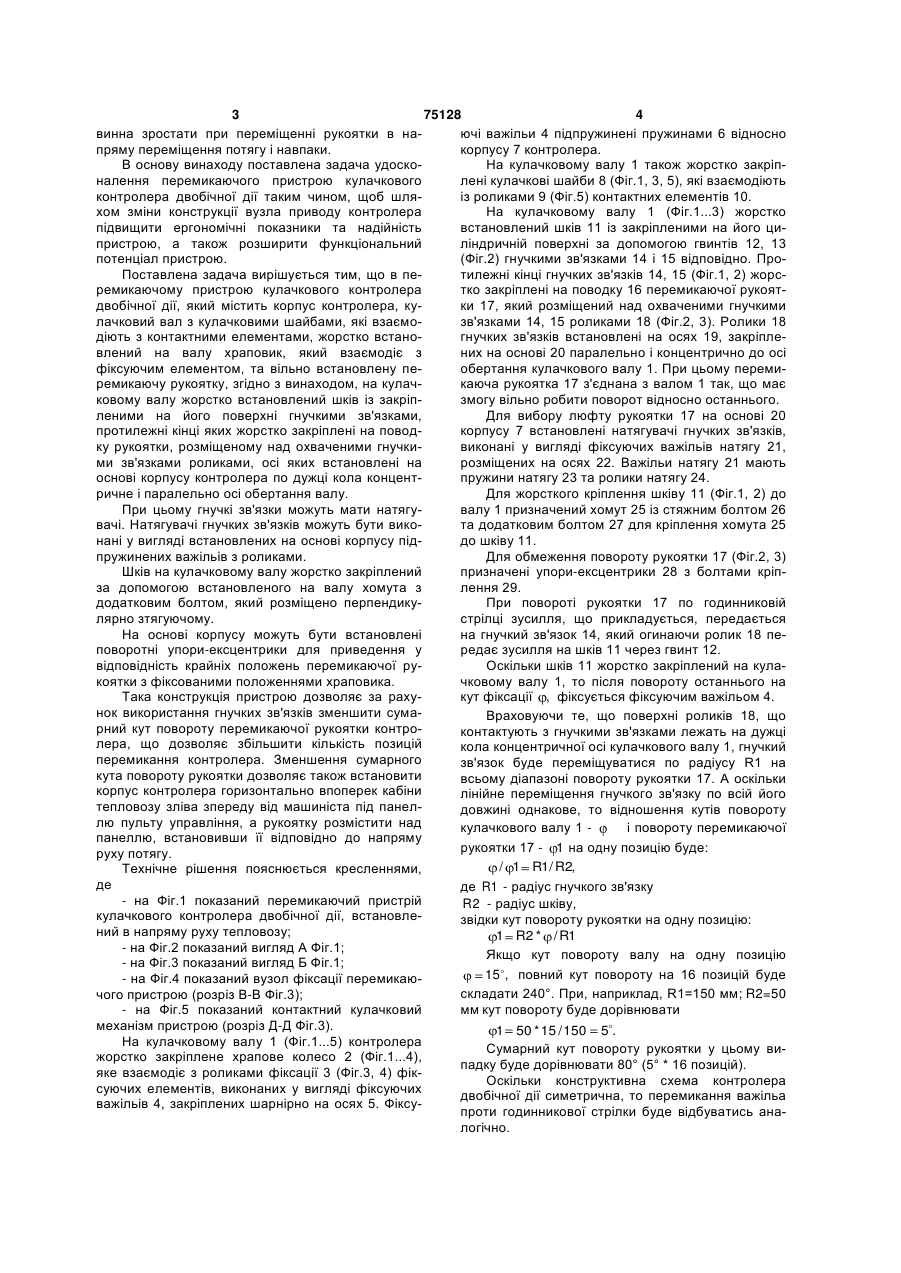
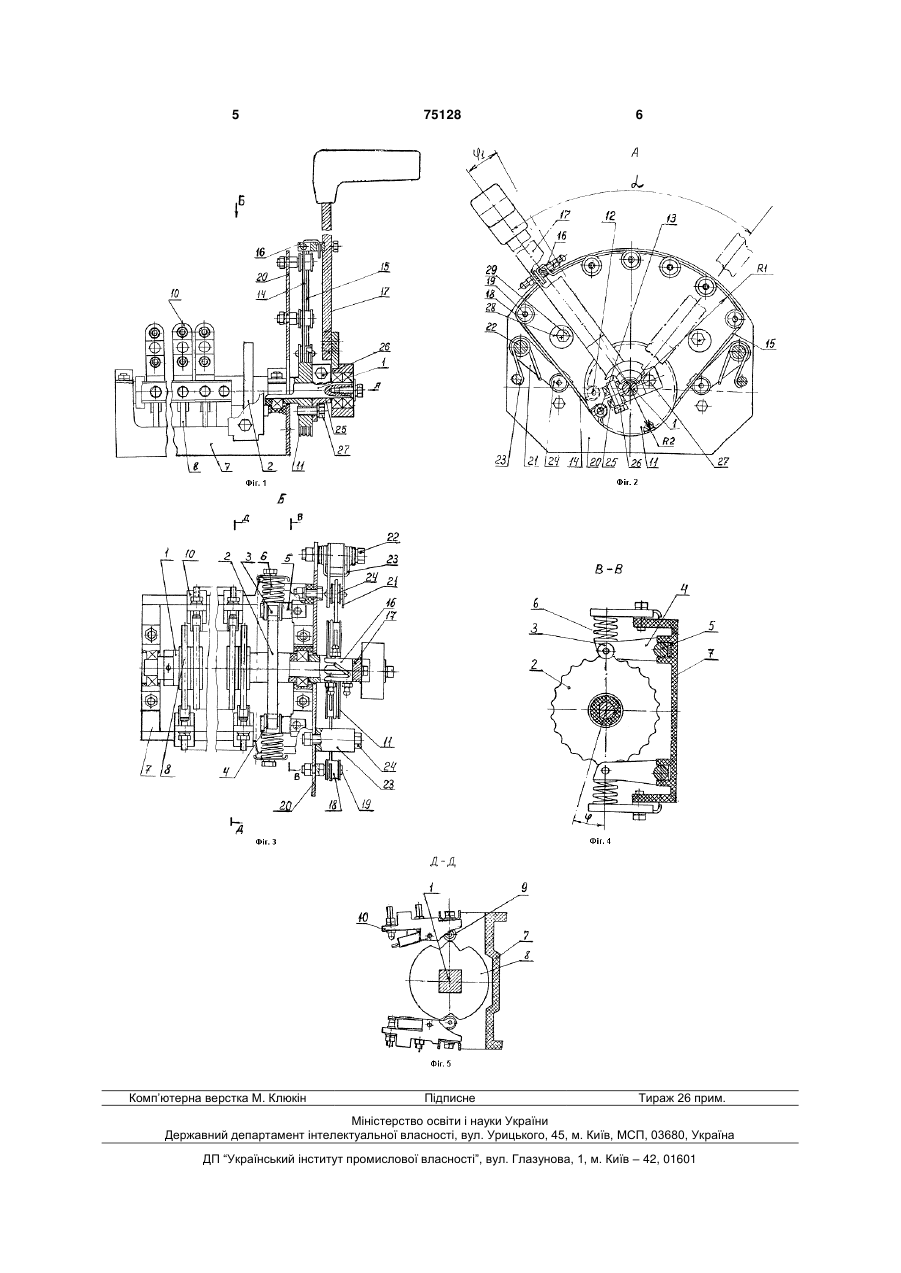
1. Перемикальний пристрій кулачкового контролера двобічної дії з розміщеними в корпусі контролера кулачковим валом та кулачковими шайбами, які взаємодіють з контактними елементами, який містить жорстко встановлений на валу храповик, який взаємодіє з фіксуючим елементом, та вільно встановлену перемикальну рукоятку, який відрізняється тим, що на кулачковому валу жорстко встановлений шків із закріпленими на його C2 2 (19) 1 3 75128 4 винна зростати при переміщенні рукоятки в наючі важільи 4 підпружинені пружинами 6 відносно пряму переміщення потягу і навпаки. корпусу 7 контролера. В основу винаходу поставлена задача удоскоНа кулачковому валу 1 також жорстко закріпналення перемикаючого пристрою кулачкового лені кулачкові шайби 8 (Фіг.1, 3, 5), які взаємодіють контролера двобічної дії таким чином, щоб шляіз роликами 9 (Фіг.5) контактних елементів 10. хом зміни конструкції вузла приводу контролера На кулачковому валу 1 (Фіг.1...3) жорстко підвищити ергономічні показники та надійність встановлений шків 11 із закріпленими на його ципристрою, а також розширити функціональний ліндричній поверхні за допомогою гвинтів 12, 13 потенціал пристрою. (Фіг.2) гнучкими зв'язками 14 і 15 відповідно. ПроПоставлена задача вирішується тим, що в петилежні кінці гнучких зв'язків 14, 15 (Фіг.1, 2) жорсремикаючому пристрою кулачкового контролера тко закріплені на поводку 16 перемикаючої рукоятдвобічної дії, який містить корпус контролера, куки 17, який розміщений над охваченими гнучкими лачковий вал з кулачковими шайбами, які взаємозв'язками 14, 15 роликами 18 (Фіг.2, 3). Ролики 18 діють з контактними елементами, жорстко встаногнучких зв'язків встановлені на осях 19, закріплевлений на валу храповик, який взаємодіє з них на основі 20 паралельно і концентрично до осі фіксуючим елементом, та вільно встановлену пеобертання кулачкового валу 1. При цьому перемиремикаючу рукоятку, згідно з винаходом, на кулачкаюча рукоятка 17 з'єднана з валом 1 так, що має ковому валу жорстко встановлений шків із закріпзмогу вільно робити поворот відносно останнього. леними на його поверхні гнучкими зв'язками, Для вибору люфту рукоятки 17 на основі 20 протилежні кінці яких жорстко закріплені на поводкорпусу 7 встановлені натягувачі гнучких зв'язків, ку рукоятки, розміщеному над охваченими гнучкивиконані у вигляді фіксуючих важільів натягу 21, ми зв'язками роликами, осі яких встановлені на розміщених на осях 22. Важільи натягу 21 мають основі корпусу контролера по дужці кола концентпружини натягу 23 та ролики натягу 24. ричне і паралельно осі обертання валу. Для жорсткого кріплення шківу 11 (Фіг.1, 2) до При цьому гнучкі зв'язки можуть мати натягувалу 1 призначений хомут 25 із стяжним болтом 26 вачі. Натягувачі гнучких зв'язків можуть бути викота додатковим болтом 27 для кріплення хомута 25 нані у вигляді встановлених на основі корпусу піддо шківу 11. пружинених важільів з роликами. Для обмеження повороту рукоятки 17 (Фіг.2, 3) Шків на кулачковому валу жорстко закріплений призначені упори-ексцентрики 28 з болтами кріпза допомогою встановленого на валу хомута з лення 29. додатковим болтом, який розміщено перпендикуПри повороті рукоятки 17 по годинниковій лярно зтягуючому. стрілці зусилля, що прикладується, передається На основі корпусу можуть бути встановлені на гнучкий зв'язок 14, який огинаючи ролик 18 пеповоротні упори-ексцентрики для приведення у редає зусилля на шків 11 через гвинт 12. відповідність крайніх положень перемикаючої руОскільки шків 11 жорстко закріплений на кулакоятки з фіксованими положеннями храповика. чковому валу 1, то після повороту останнього на Така конструкція пристрою дозволяє за рахукут фіксації , фіксується фіксуючим важільом 4. нок використання гнучких зв'язків зменшити сумаВраховуючи те, що поверхні роликів 18, що рний кут повороту перемикаючої рукоятки контроконтактують з гнучкими зв'язками лежать на дужці лера, що дозволяє збільшити кількість позицій кола концентричної осі кулачкового валу 1, гнучкий перемикання контролера. Зменшення сумарного зв'язок буде переміщуватися по радіусу R1 на кута повороту рукоятки дозволяє також встановити всьому діапазоні повороту рукоятки 17. А оскільки корпус контролера горизонтально впоперек кабіни лінійне переміщення гнучкого зв'язку по всій його тепловозу зліва зпереду від машиніста під панелдовжині однакове, то відношення кутів повороту лю пульту управління, а рукоятку розмістити над кулачкового валу 1 і повороту перемикаючої панеллю, встановивши її відповідно до напряму рукоятки 17 - 1 на одну позицію буде: руху потягу. / 1 R1/ R2, Технічне рішення пояснюється кресленнями, де де R1 - радіус гнучкого зв'язку - на Фіг.1 показаний перемикаючий пристрій R2 - радіус шківу, кулачкового контролера двобічної дії, встановлезвідки кут повороту рукоятки на одну позицію: ний в напряму руху тепловозу; 1 R2 * / R1 - на Фіг.2 показаний вигляд А Фіг.1; Якщо кут повороту валу на одну позицію - на Фіг.3 показаний вигляд Б Фіг.1; 15 , повний кут повороту на 16 позицій буде - на Фіг.4 показаний вузол фіксації перемикаюскладати 240°. При, наприклад, R1=150 мм; R2=50 чого пристрою (розріз В-В Фіг.3); мм кут повороту буде дорівнювати - на Фіг.5 показаний контактний кулачковий механізм пристрою (розріз Д-Д Фіг.3). 1 50 * 15 / 150 5. На кулачковому валу 1 (Фіг.1...5) контролера Сумарний кут повороту рукоятки у цьому вижорстко закріплене храпове колесо 2 (Фіг.1...4), падку буде дорівнювати 80° (5° * 16 позицій). яке взаємодіє з роликами фіксації 3 (Фіг.3, 4) фікОскільки конструктивна схема контролера суючих елементів, виконаних у вигляді фіксуючих двобічної дії симетрична, то перемикання важільа важільів 4, закріплених шарнірно на осях 5. Фіксупроти годинникової стрілки буде відбуватись аналогічно. 5 Комп’ютерна верстка M. Клюкін 75128 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSwitching system of the cam controller of bilateral action
Автори англійськоюIvanov Viktor Oleksiiovych, Tatarskyi Oleksii Dmytrovych, Chovhan Anatolii Dmytrovych
Назва патенту російськоюПереключающее устройство кулачкового контролера двухстороннего действия
Автори російськоюИванов Виктор Алексеевич, Татарский Алексей Дмитриевич, Човган Анатолий Дмитриевич
МПК / Мітки
МПК: B60L 15/20
Мітки: контролера, дії, двобічної, кулачкового, пристрій, перемикальний
Код посилання
<a href="https://ua.patents.su/3-75128-peremikalnijj-pristrijj-kulachkovogo-kontrolera-dvobichno-di.html" target="_blank" rel="follow" title="База патентів України">Перемикальний пристрій кулачкового контролера двобічної дії</a>
Пристрій багатоканального вводу сигналів програмованого контролера
Номер патенту: 62641
Опубліковано: 15.12.2003
Автори: Назаренко Віталій Вікторович, Макаров Микита Сергійович, Макаров Сергій Анатольович, Цилюрік Леонід Іванович
МПК: G05B 19/18
Мітки: сигналів, багатоканального, вводу, пристрій, контролера, програмованого
Формула / Реферат:
Пристрій багатоканального вводу сигналів програмованого контролера, який містить контролер, мультиплексор, до інформаційних входів якого підключені перші виходи датчиків дискретних сигналів, який відрізняється тим, що до виходу мультиплексора підключений вхід таймера та перший кінець конденсатора, другий кінець якого підключений до нульової шини, а до виходу таймера підключені: вхід переривань контролера, лічильний вхід лічильника, другі...
Привод кулачкового валу паливного насоса високого тиску
Номер патенту: 18352
Опубліковано: 25.12.1997
Автор: Бєлов Семен Миколаєвич
МПК: F02M 59/00, F02M 39/00
Мітки: тиску, високого, привод, кулачкового, паливного, валу, насоса
Формула / Реферат:
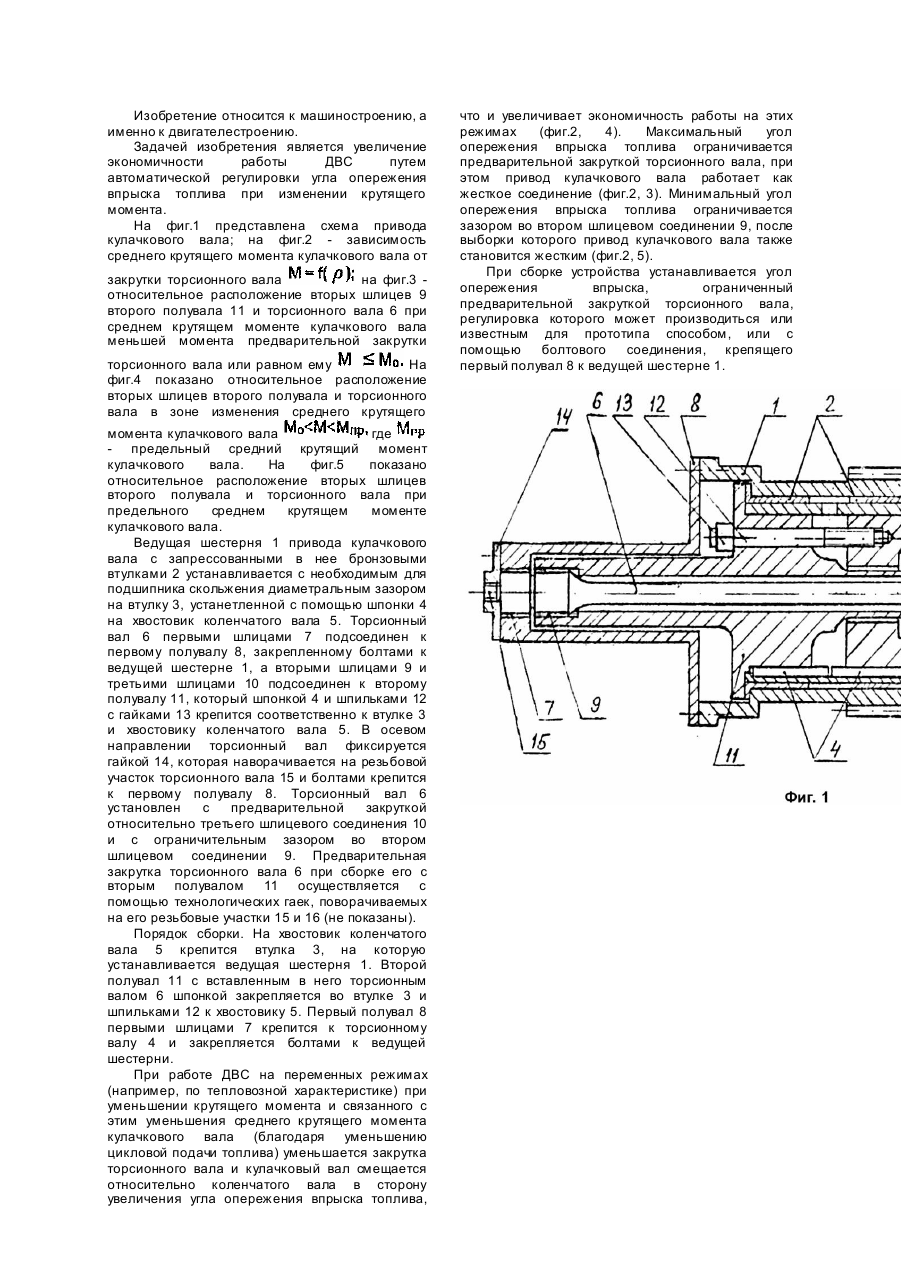
Привод кулачкового вала топливного насоса высокого давления, содержащий хвостовик коленчатого вала с ведущей шестерней, кинематически связанной с ведомой шестерней кулачкового вала топливного насоса, отличающийся тем, что привод снабжен втулкой, установленной соосно хвостовику и жестко связанной с последним, первым полым полувалом с первыми шлицами, выполненными на его внутренней поверхности, вторым полым полувалом со вторыми и третьими...
Перемикальний пристрій для навантажувальних перемикачів ступеневих вимикачів і для навантажувальних селекторів (варіанти)
Номер патенту: 44268
Опубліковано: 15.02.2002
Автори: Неймейєр Джозеф, Дохналь Дітер, Пільмейєр Леонард, Лісманн-Міске Ханс-Хеннінг
МПК: H01F 29/00, H01H 9/00
Мітки: ступеневих, вимикачів, селекторів, пристрій, навантажувальних, варіанти, перемикачів, перемикальний
Формула / Реферат:
1. Переключающее устройство для нагрузочных переключателей ступенчатых выключателей и для нагрузочных селекторов, содержащее, по меньшей мере, два неподвижных ступенчатых контакта и два коммутационных контакта, перемещаемых в двух направлениях и переключающих нагрузочное ответвление с первого неподвижного ступенчатого контакта на второй, причем первый - главный коммутационный контакт выполнен с возможностью соединения непосредственно с...
Ведучий шків
Номер патенту: 62891
Опубліковано: 15.12.2003
Автори: Архангельський Георгій Володимирович, Дубинець Олександр Іванович
МПК: F16H 55/32
Формула / Реферат:
Ведучий шків, що містить встановлені на валу нерухомий і рухомий конічні диски, кулачковий профіль, нерухомо закріплений на валу, основні вантажі, що зв'язані з рухомим диском, на яких шарнірно за допомогою пружин крутіння встановлені додаткові вантажі з роликами на кінцях, що взаємодіють з кулачковим профілем, який відрізняється тим, що основні вантажі зв'язані з рухомим диском через несучі штоки, на кінцях яких встановлені ролики з...
Механічний перемикальний контакт

Номер патенту: 72650
Опубліковано: 15.03.2005
Автори: Клот Гюнтер, Бертль Райнхольд, Пілльмаєр Леонхард
МПК: H01H 9/00, H01H 31/00
Мітки: механічний, перемикальний, контакт
Формула / Реферат:
1. Механічний перемикальний контакт для двополюсного перемикання, зокрема в силовому перемикачі ступеневого перемикача відводів трансформатора під навантаженням, який містить ізоляційний тримач (1), на якому попарно один навпроти іншого розміщені нерухомі контакти (4, 5; 6, 7), електропровідний контактний елемент (8), встановлений з можливістю хитання проти зусилля пружин (11,12) між двома положеннями навколо точки обертання таким чином, що...
Попередній патент: Фармацевтична комбінація, що містить комбретастатин та протиракові агенти
Наступний патент: Спосіб наведення лінії прицілювання для системи керування озброєнням об’єктів бронетанкової техніки
Випадковий патент: Застосування ботулінового токсину для профілактики та лікування бромідрозу