Автономний сходовий підйомник для інвалідного візка
Номер патенту: 111534
Опубліковано: 10.05.2016
Формула / Реферат
Автономний сходовий підйомник для інвалідного візка, що кріпиться під типовий інвалідний візок, включає в себе раму, до якої кріпиться візок, силовий електропривод, колеса й опорні ноги, установлені на обертових важелях-консолях, електромагнітну систему блокування обертання коліс, систему контролю положення приводу на сходинці, акумуляторну батарею, систему електронного управління приводом і блокування, який відрізняється тим, що містить додатково планетарний привід крокуючого пристрою, що складається з рухомого колеса та опорної ноги, механізм крокування виконаний з можливістю здійснювання, за допомогою планетарного приводу, узгодженого переміщення опорної ноги і колеса, розташованих на кінцях обертових важелів-консолей, що забезпечує необхідні траєкторії переміщення елементів конструкції і виключає необхідність фіксації опорної ноги в напрямних.
Текст
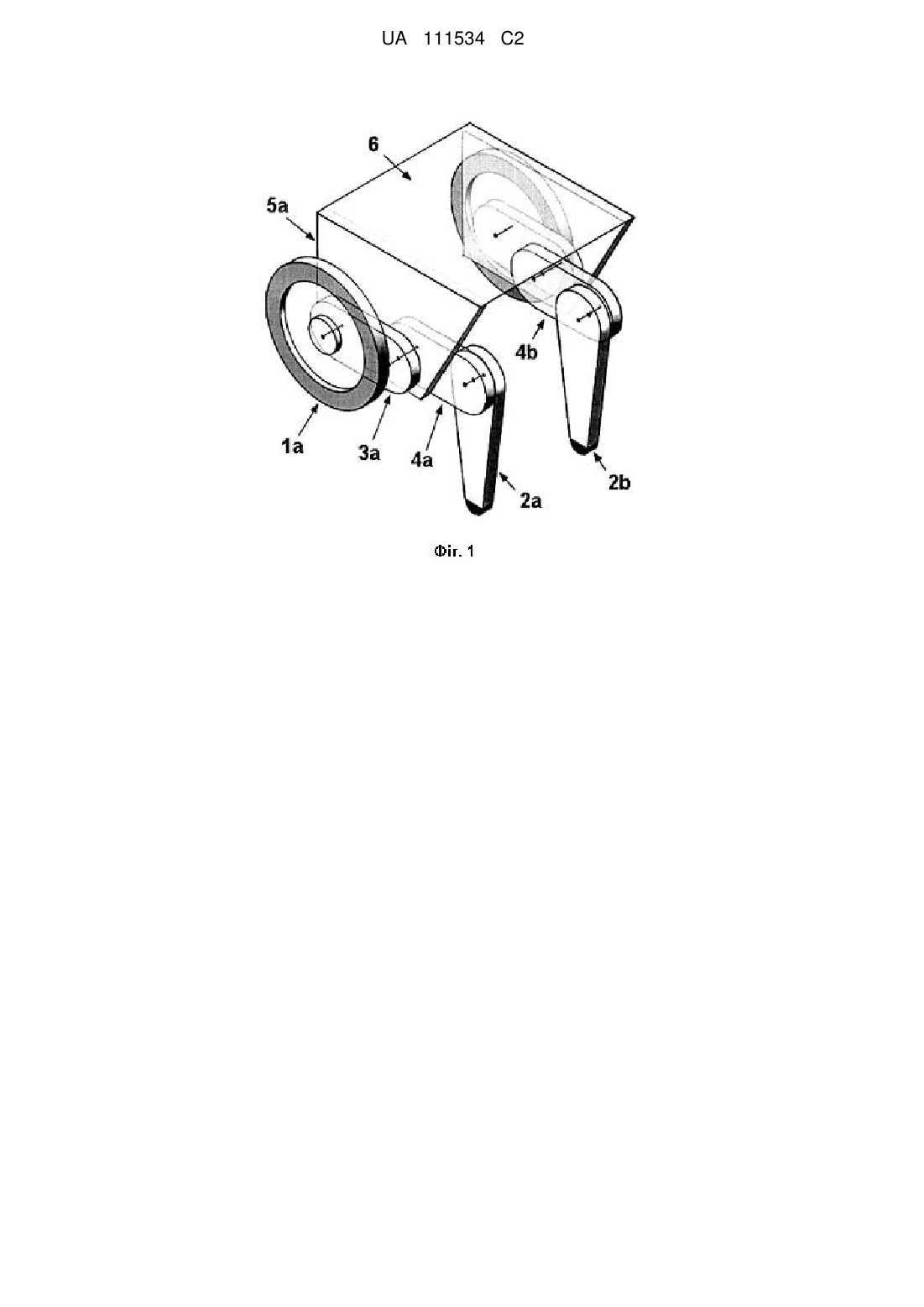
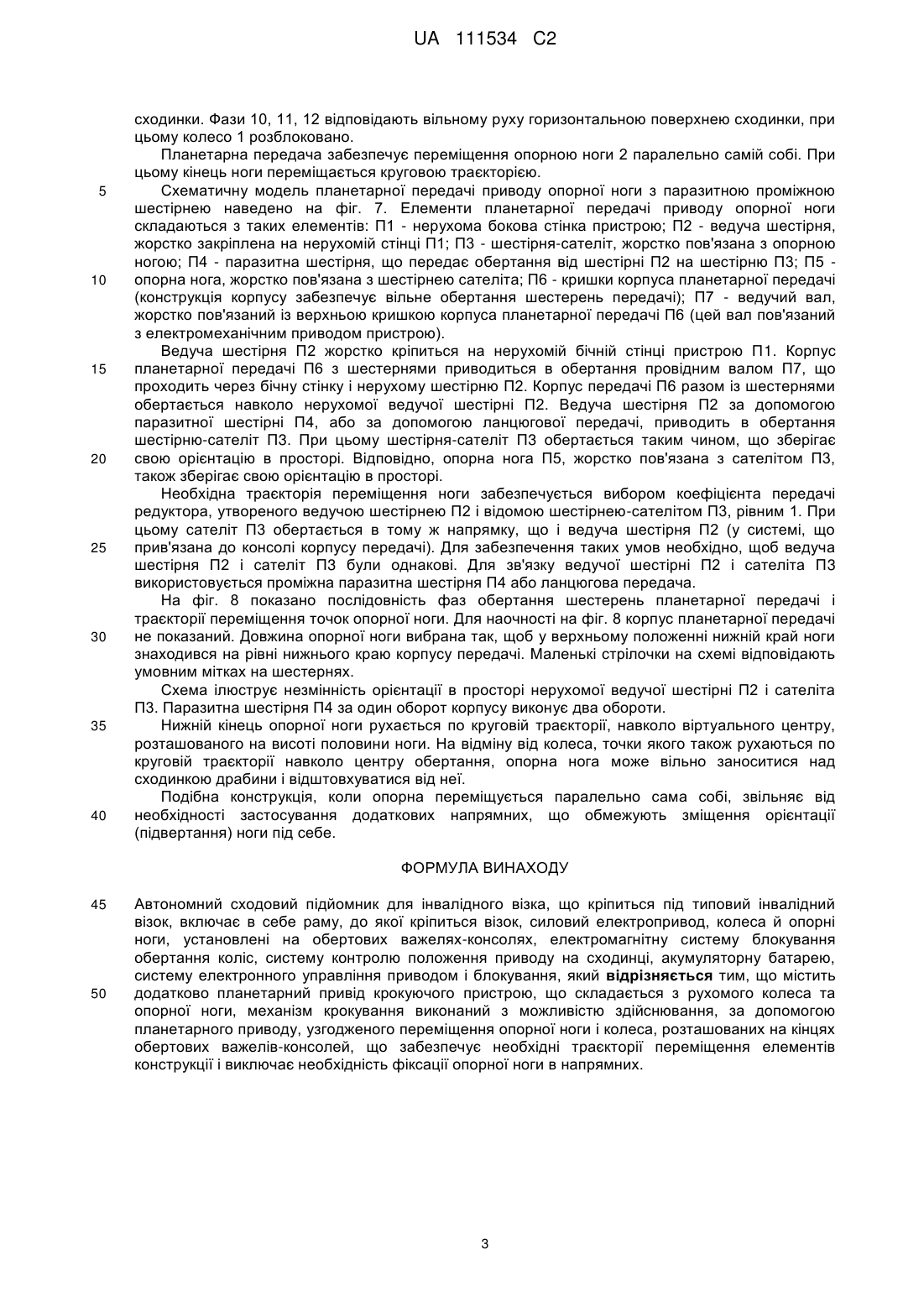
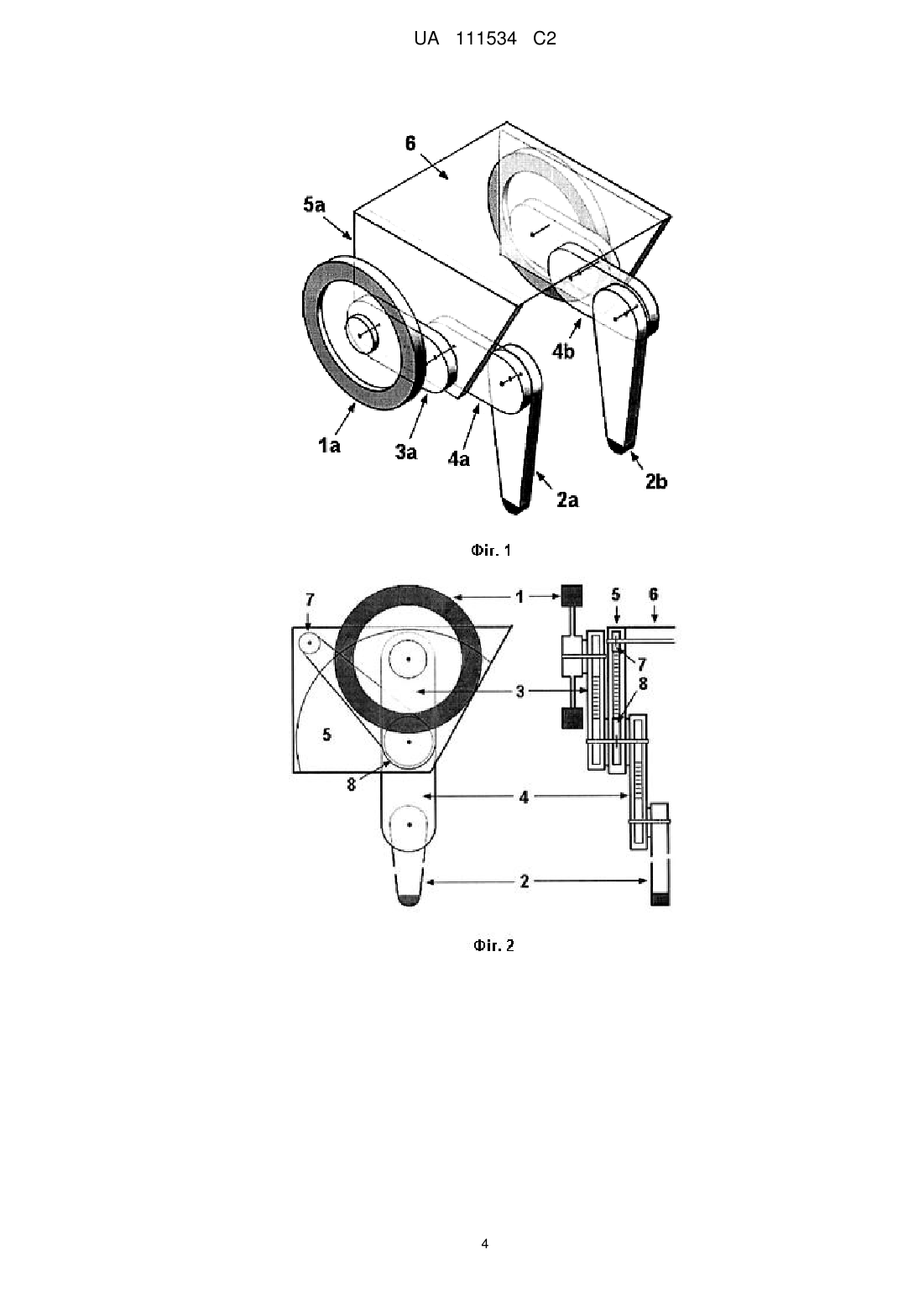
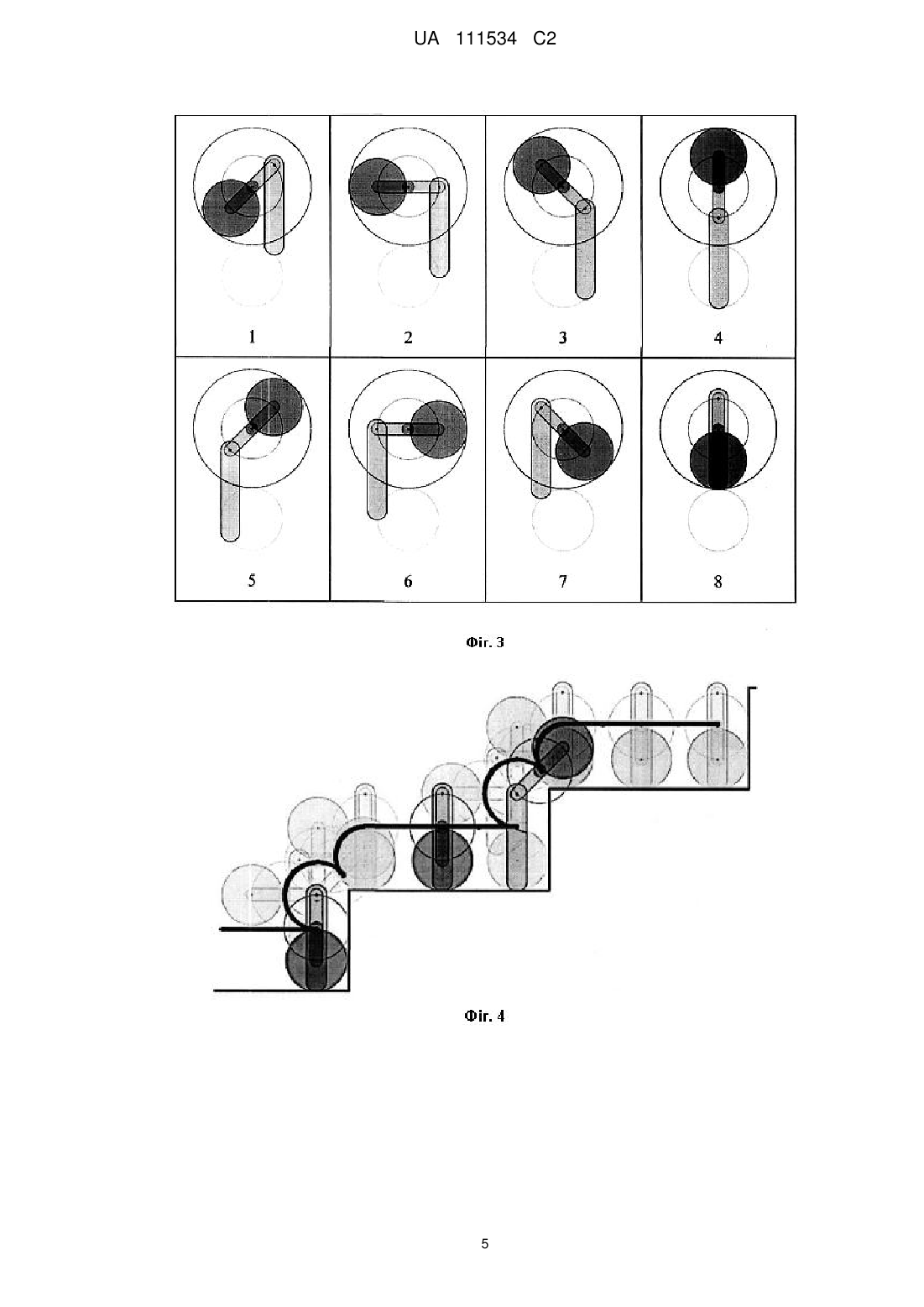
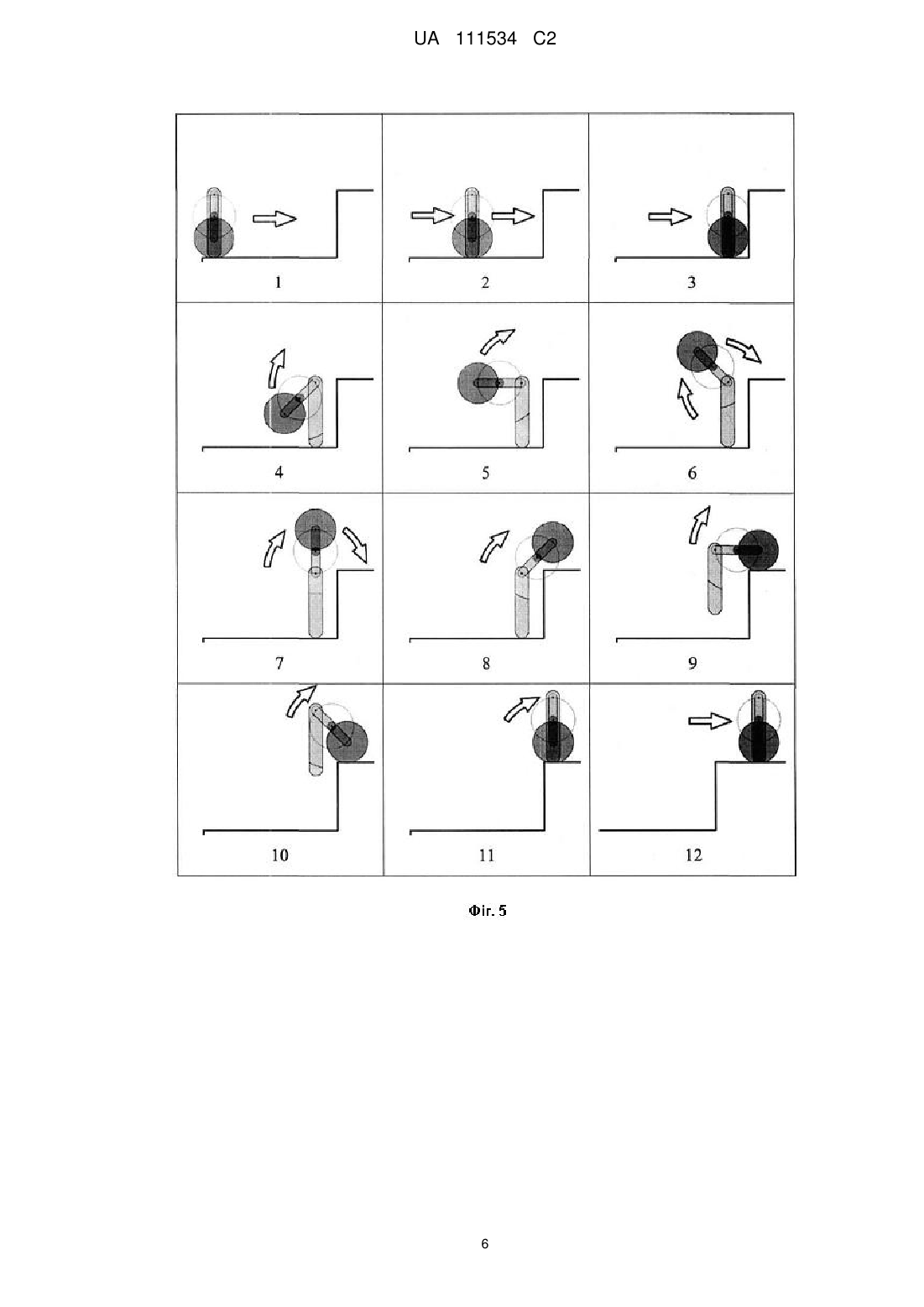
Реферат: Винахід призначений для полегшення переміщення інвалідного візка сходовими маршами. Автономний сходовий підйомник містить такі елементи: раму, до якої кріпиться візок, силовий електропривод; планетарний редуктор, що забезпечує необхідні траєкторії переміщення елементів конструкції; колеса, установлені на підйомних консолях; електромагнітну систему блокування обертання коліс; систему контролю положення приводу на сходинці; акумуляторну батарею і систему електронного управління приводом і блокування. Основними елементами приводу є пара опорних ніг і коліс, установлених із боків підйомника на кінцях важелівконсолей. Узгоджений рух важелів-консолей коліс дозволяє здійснювати як крокування сходинками, так і вільне кочення коліс на горизонтальних ділянках сходинок і по рівній поверхні. Крокування здійснюється шляхом відштовхування опорних ніг від сходинки і закиданням заблокованих від вільного кочення коліс на наступну сходинку. Вільне кочення коліс реалізується шляхом підйому опорних ніг у верхнє положення і розблокування коліс. UA 111534 C2 (12) UA 111534 C2 UA 111534 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до засобів для переміщення інвалідів сходовими маршами. Автономний сходовий підйомник призначений для установки на типовий інвалідний візок для полегшення його переміщення сходовими маршами. Сходовий підйомник установлюється під інвалідним візком і кріпиться до нього за допомогою спеціального кріплення, що монтується на візку додатково. Найближчими прототипами пристрою, що пропонується, є пристрої, описані в патентах US patent 6164398; US patent 8061460 B2; US patent 8439370 B2. Пристрій за US patent 6164398 являє собою вантажний візок для переміщення вантажів сходами. Вантажний візок складається із рами, коліс, розміщених на рамі, крокуючого механізму, оснащеного електродвигуном, та планетарної передачі для переміщення опорної ноги, один край якої фіксується від зсувів (підворотів) у напрямних. Недоліком зазначеної конструкції є наявність довгих вертикальних напрямних, якими ковзає кінець важеля опорної ноги, що ускладнює розміщення приводу під інвалідним візком зі збереженням її балансування. Пристрій для піднімання сходами, адаптований для інвалідного візка, за US patent 8061460 В2 використовує для переміщення сходовими маршами пару коліс (по одному з кожного боку приводу), установлених на важелях-консолях, що обертаються. Важелі-консолі "закидають" колеса на сходинку і "виважують" привід із візком вгору. Недоліком даної конструкції є велика довжина важелів-консолей, і, відповідно, великі моменти сил, які впливають на елементи конструкції. Крім того, потрібно дуже тонке управління механізмом блокування і приводу колеса в кінці руху горизонтальною поверхнею сходинки перед початком закидання колеса на наступну сходинку. Пристрій для піднімання сходами за US patent 8439370 В2 є розвитком пристрою за US patent 8061460 В2 та включає в себе раму, силовий електропривод, дві пари коліс, установлені на обертових важелях-консолях, електромагнітну систему блокування обертання коліс, систему контролю положення приводу на сходинці, акумуляторну батарею, систему електронного управління приводом і блокування. У новій конструкції для усунення недоліків попереднього варіанта використовується дві пари коліс (по два з кожного боку), установлених на важеляхконсолях, що узгоджено обертаються. Кожен із важелів-консолей має власну точку кріплення. Взаємне розташування осей важелів-консолей вибрано таким чином, щоб виключити самоблокування приводу і забезпечити максимальну плавність ходу приводу з візком. Недоліком конструкції є надмірна складність конструкції приводу. В основу даного винаходу поставлено задачу вдосконалення відомих конструкцій сходових підйомників шляхом заміни конструкції крокуючого механізму, що в цілому приводить до спрощення конструкції та підвищення її надійності. Для усунення недоліків наявних конструкцій нами запропоновано пристрій, що має більш просту конструкцію механізму привода, ніж пристрій за US patent 8439370 В2, замість другої пари коліс використовується пара опорних ніг, і, на відміну від пристрою за US patent 6164398, не вимагає напрямних для цих опорних ніг. Поставлена задача розв'язується шляхом упровадження планетарного приводу крокуючого пристрою, що складається з рухомого колеса та опорної ноги. Запропонований пристрій складається з таких основних елементів: рами, до якої кріпиться візок; силового електроприводу; планетарного редуктора, що забезпечує необхідні траєкторії переміщення елементів конструкції; коліс, установлених на підйомних консолях; електромагнітної системи блокування обертання коліс; системи контролю положення приводу на сходинці; акумуляторної батареї і системи електронного управління приводом і блокування. Основними елементами приводу є пара опорних ніг і коліс, установлених із боків автономного сходового підйомника (фіг. 1, 2). На фіг. 1 показано загальний вигляд і взаємне розташування коліс і опорних ніг автономного сходового підйомника, індекси "а" і "b" відповідають елементам лівого і правого боку приводу. На фіг. 2 схематично показано пристрій лівої половини крокуючого механізму - вигляд збоку зовні і вигляд у розрізі спереду. Крокуючий механізм зображений у стані - нога опущена, колесо підняте. На даних кресленнях показано такі елементи: 1 - колесо, закріплене на важелі-консолі колеса 3; 2 - опорна нога, закріплена на важелі-консолі опорної ноги 4; 5 - бічна стінка короб із порожниною для елементів передачі обертання на важелі-консолі колеса і опорної ноги; 6 загальна частина основи корпусу, що зв'язує його праву і ліву бічні стінки 5а і 5b; 7 - ведуча шестірня передачі приводу важелів-консолей, винесена з області що "замітає" важіль-консоль ноги 4; 8 - ведуча шестірня передачі приводу важелів-консолей. Опорна нога 2 і відповідне їй колесо 1 установлені на кінцях важелів-консолей 3 і переміщуються взаємопов'язаними круговими траєкторіями навколо загального центру 1 UA 111534 C2 5 10 15 20 25 30 35 40 45 50 55 обертання (фіг. 3, де показано послідовність фаз рухів колеса і опорної ноги при обертанні важелів-консолей). Узгоджений рух важелів-консолей колеса 3 дозволяє здійснювати як крокування сходинками, так і вільне кочення колеса на горизонтальних ділянках сходинок і по рівній поверхні. Крокування здійснюється шляхом відштовхування опорної ноги (ніг) 2 від сходинки і закиданням заблокованого від вільного кочення колеса (коліс) 1 на наступну сходинку. Вільне кочення колеса 1 реалізується шляхом підйому опорної ноги 2 у верхнє положення і розблокування колеса. Схема руху пристрою сходинками, зокрема схема переміщень опорної ноги і колеса, і траєкторія центру важелів консолей при русі по сходинках, показана на фіг. 4. Для можливості безперешкодного переміщення опорної ноги 2 і колеса 1 вони розміщені по різні сторони від бічних стінок короба 5 приводу (фіг. 1, 2). На фіг. 1, 2 показано приклад, коли колеса 1 і їхні консолі 3 розташовані зовні, а опорна нога (ноги) 2 і її консоль (консолі) 4 усередині короба. Усередині коробів біля бокових стінок 5 розміщений механізм передачі обертання на приводи важелів-консолей. Цей механізм виносить точки передачі обертання за область, що замітає важіль-консоль під час її обертання (фіг. 2). Для забезпечення необхідної траєкторії переміщення опорної ноги 2 зі збереженням її орієнтації в просторі використовується планетарна передача (фіг. 7), розміщена всередині обертової консолі. Планетарна передача може бути утворена як із трьох взаємно зчеплених шестерень (ведуча, ведена і паразитна, між ними), так і двох зірочок (ведучою і веденою) і ланцюгової передачі між ними. При цьому ведуча шестірня (зірочка) передачі нерухома відносно корпусу, а навколо неї обертається корпус важеля консолі. На веденій шестірні (зірочці) жорстко закріплена опорна нога. При коефіцієнті передачі 1:1 і співпадаючих напрямках обертань веденої і ведучої шестірні (зірочки) відносно корпусу важеля консолі, ведена шестірня (зірочка) зберігає свою орієнтацію в просторі. При цьому опорна нога на кінці консолі переміщається паралельно самій собі, зі збереженням своєї орієнтації в просторі. Колесо 1, розміщене на своєму важелі консолі 3, обертається навколо центру кріплення цієї консолі опозитно до руху точки кріплення опорної ноги. Для запобігання вільному провертанню і небажаному зісковзуванню з краю сходинки, обертання колеса 1 блокується під час обертання консолі 3, на якій це колесо закріплене. Під час руху горизонтальною ділянкою сходинки, а також під час руху рівною поверхнею опорна нога 2 піднімається у верхнє положення, так, щоб не заважати руху, а колесо 1 розблокується для вільного обертання. Задача запобігання перекиданню механізму крокування зі встановленою на нього коляскою покладається на оператора, що керує приводом коляски. Оператор контролює балансування збереження орієнтації опорних ніг 2 відносно поверхні сходинок за допомогою довгих ручокважелів, закріплених на автономному сходовому підйомнику. Зменшення фізичних зусиль оператора з балансування досягається вибором достатньої довжини ручок-важелів і розміщенням сходового підйомника під центром ваги візка з інвалідом. На фіг. 5 показана послідовність фаз руху колеса і опорної ноги автономного сходового підйомника під час підйому сходовим маршем. Фази 1, 2, 3 відповідають руху по горизонтальній поверхні сходинки, при цьому колесо 1 розблоковано. У фазі 3 колесо 1 упирається в край сходинки і починається фаза крокування - колесо 1 піднімається й одночасно відводиться трохи назад, а опорна нога 2 опускається і приймає на себе вагу вантажу. У фазах 4, 5, 6, 7, 8 система з вантажем утримується на опорній нозі 2, а колесо закидається важелем-консоллю на наступну сходинку. У фазах 9, 10, 11 колесо 1 спирається на наступну сходинку, і система з вантажем вичавлюється важелем-консоллю колеса 3 вгору на висоту наступної сходинки, одночасно піднімається опорна нога 2. При цьому вільне обертання колеса 1 блокується для недопущення зісковзування з краю сходинки. У фазі 11 система з вантажем повністю піднята на наступну сходинку - колесо 1 опущено вниз, а опорна нога 2 піднята вгору і починається фаза вільного руху горизонтальною поверхнею сходинки. При цьому колесо 1 розблоковується. На фіг. 6 показано послідовність фаз руху колеса і опорної ноги автономного сходового підйомника під час спуску сходовим маршем. Фаза 1 відповідає руху по горизонтальній поверхні сходинки, при цьому колесо 1 розблоковано. У фазі 2 колесо наближається до краю сходинки, колесо 1 блокується для недопущення зісковзування з краю сходинки, і починається фаза крокування. Колесо 1 опускається й одночасно вниз висувається опорна нога 2 - фази 2, 3, 4. У фазі 5 опорна нога 2 впирається в поверхню наступної сходинки і приймає на себе вагу системи з вантажем. У фазах 5, 6, 7, 8, 9 система опускається й одночасно опускається колесо 1. У фазі 10 система з вантажем повністю опущена на наступну сходинку - колесо 1 опущено вниз, а опорна нога 2 піднята вгору і починається фаза вільного руху по горизонтальній поверхні 2 UA 111534 C2 5 10 15 20 25 30 35 40 сходинки. Фази 10, 11, 12 відповідають вільному руху горизонтальною поверхнею сходинки, при цьому колесо 1 розблоковано. Планетарна передача забезпечує переміщення опорною ноги 2 паралельно самій собі. При цьому кінець ноги переміщається круговою траєкторією. Схематичну модель планетарної передачі приводу опорної ноги з паразитною проміжною шестірнею наведено на фіг. 7. Елементи планетарної передачі приводу опорної ноги складаються з таких елементів: П1 - нерухома бокова стінка пристрою; П2 - ведуча шестірня, жорстко закріплена на нерухомій стінці П1; П3 - шестірня-сателіт, жорстко пов'язана з опорною ногою; П4 - паразитна шестірня, що передає обертання від шестірні П2 на шестірню П3; П5 опорна нога, жорстко пов'язана з шестірнею сателіта; П6 - кришки корпуса планетарної передачі (конструкція корпусу забезпечує вільне обертання шестерень передачі); П7 - ведучий вал, жорстко пов'язаний із верхньою кришкою корпуса планетарної передачі П6 (цей вал пов'язаний з електромеханічним приводом пристрою). Ведуча шестірня П2 жорстко кріпиться на нерухомій бічній стінці пристрою П1. Корпус планетарної передачі П6 з шестернями приводиться в обертання провідним валом П7, що проходить через бічну стінку і нерухому шестірню П2. Корпус передачі П6 разом із шестернями обертається навколо нерухомої ведучої шестірні П2. Ведуча шестірня П2 за допомогою паразитної шестірні П4, або за допомогою ланцюгової передачі, приводить в обертання шестірню-сателіт П3. При цьому шестірня-сателіт П3 обертається таким чином, що зберігає свою орієнтацію в просторі. Відповідно, опорна нога П5, жорстко пов'язана з сателітом П3, також зберігає свою орієнтацію в просторі. Необхідна траєкторія переміщення ноги забезпечується вибором коефіцієнта передачі редуктора, утвореного ведучою шестірнею П2 і відомою шестірнею-сателітом П3, рівним 1. При цьому сателіт П3 обертається в тому ж напрямку, що і ведуча шестірня П2 (у системі, що прив'язана до консолі корпусу передачі). Для забезпечення таких умов необхідно, щоб ведуча шестірня П2 і сателіт П3 були однакові. Для зв'язку ведучої шестірні П2 і сателіта П3 використовується проміжна паразитна шестірня П4 або ланцюгова передача. На фіг. 8 показано послідовність фаз обертання шестерень планетарної передачі і траєкторії переміщення точок опорної ноги. Для наочності на фіг. 8 корпус планетарної передачі не показаний. Довжина опорної ноги вибрана так, щоб у верхньому положенні нижній край ноги знаходився на рівні нижнього краю корпусу передачі. Маленькі стрілочки на схемі відповідають умовним мітках на шестернях. Схема ілюструє незмінність орієнтації в просторі нерухомої ведучої шестірні П2 і сателіта П3. Паразитна шестірня П4 за один оборот корпусу виконує два обороти. Нижній кінець опорної ноги рухається по круговій траєкторії, навколо віртуального центру, розташованого на висоті половини ноги. На відміну від колеса, точки якого також рухаються по круговій траєкторії навколо центру обертання, опорна нога може вільно заноситися над сходинкою драбини і відштовхуватися від неї. Подібна конструкція, коли опорна переміщується паралельно сама собі, звільняє від необхідності застосування додаткових напрямних, що обмежують зміщення орієнтації (підвертання) ноги під себе. ФОРМУЛА ВИНАХОДУ 45 50 Автономний сходовий підйомник для інвалідного візка, що кріпиться під типовий інвалідний візок, включає в себе раму, до якої кріпиться візок, силовий електропривод, колеса й опорні ноги, установлені на обертових важелях-консолях, електромагнітну систему блокування обертання коліс, систему контролю положення приводу на сходинці, акумуляторну батарею, систему електронного управління приводом і блокування, який відрізняється тим, що містить додатково планетарний привід крокуючого пристрою, що складається з рухомого колеса та опорної ноги, механізм крокування виконаний з можливістю здійснювання, за допомогою планетарного приводу, узгодженого переміщення опорної ноги і колеса, розташованих на кінцях обертових важелів-консолей, що забезпечує необхідні траєкторії переміщення елементів конструкції і виключає необхідність фіксації опорної ноги в напрямних. 3 UA 111534 C2 4 UA 111534 C2 5 UA 111534 C2 6 UA 111534 C2 7 UA 111534 C2 8 UA 111534 C2 Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюAutonomous ladder hoist for wheelchair
Автори англійськоюBehlytsia Volodymyr Petrovych, Kubov Volodymyr Illich
Назва патенту російськоюАвтономный лестничный подъемник для инвалидной коляски
Автори російськоюБеглица Владимир Петрович, Кубов Владимир Ильич
МПК / Мітки
МПК: A61G 5/06, B62B 9/02, B62B 5/02
Мітки: підйомник, інвалідного, візка, сходовий, автономний
Код посилання
<a href="https://ua.patents.su/11-111534-avtonomnijj-skhodovijj-pidjjomnik-dlya-invalidnogo-vizka.html" target="_blank" rel="follow" title="База патентів України">Автономний сходовий підйомник для інвалідного візка</a>
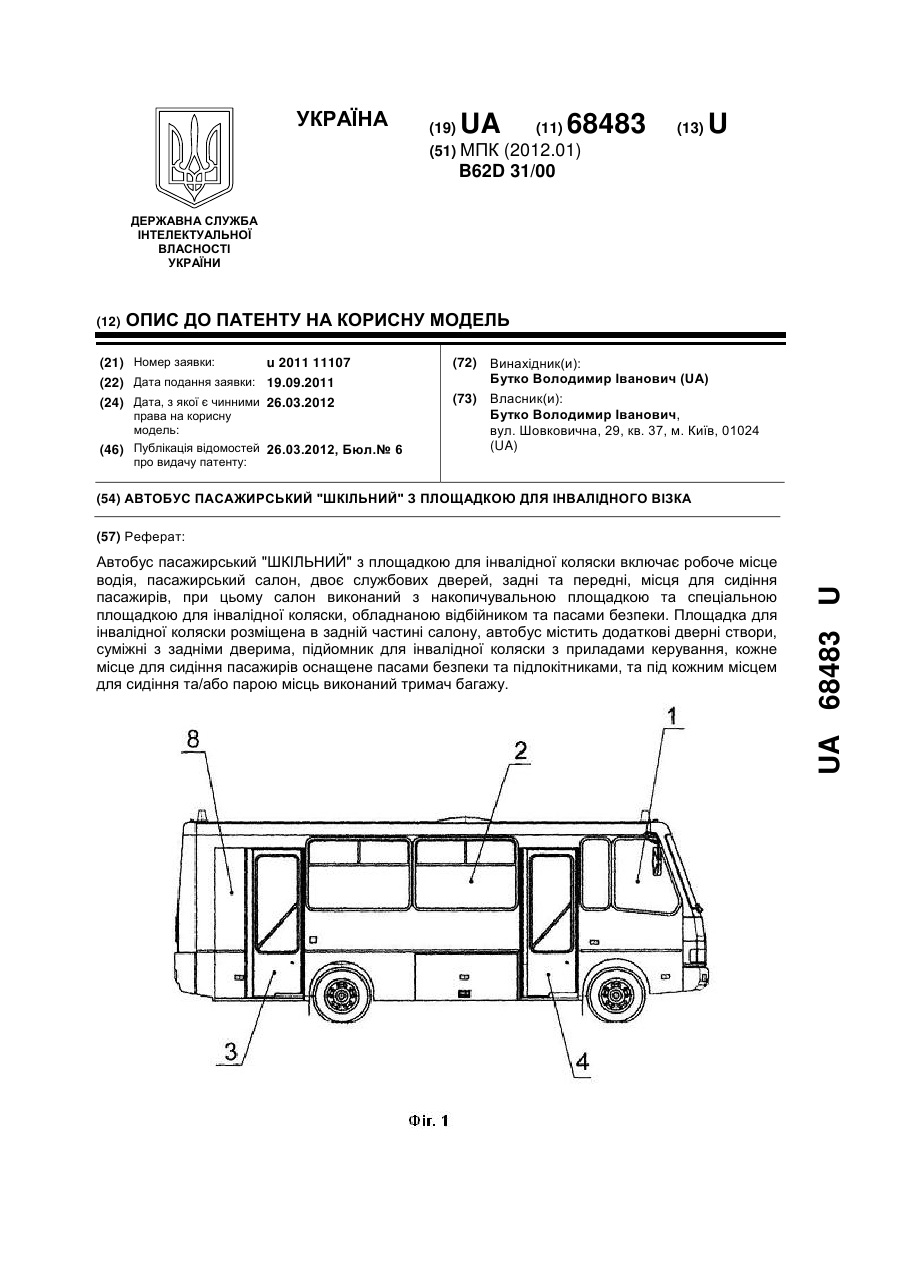
Автобус пасажирський “шкільний” з площадкою для інвалідного візка
Номер патенту: 68483
Опубліковано: 26.03.2012
Автор: Бутко Володимир Іванович
МПК: B62D 31/00
Мітки: пасажирський, площадкою, автобус, шкільний, візка, інвалідного
Формула / Реферат:
1. Автобус пасажирський з площадкою для інвалідної коляски, що включає робоче місце водія, пасажирський салон, двоє службових дверей, задні та передні, місця для сидіння пасажирів, при цьому салон виконаний з накопичувальною площадкою та спеціальною площадкою для інвалідної коляски, обладнаною відбійником та пасами безпеки, який відрізняється тим, що площадка для інвалідної коляски розміщена в задній частині салону, автобус містить додаткові...
Підйомник гвинтовий
Номер патенту: 63513
Опубліковано: 10.10.2011
Автор: ЗАБОРА ВОЛОДИМИР МИКИТОВИЧ
МПК: B66F 1/00
Формула / Реферат:
Підйомник гвинтовий, який складається з каркаса, столика і підйомного механізму, який відрізняється тим, що підйомний механізм має три плити, між якими розміщений електродвигун, два складні зубчаті колеса і конусне зубчате колесо, на якому закріплений різьбовий гвинт, причому зубчата шестірня електродвигуна входить в зачеплення з нижніми циліндричними частинами складних зубчатих коліс, а верхні конусні частини складних коліс входять в...
Пересувний підйомник
Номер патенту: 64758
Опубліковано: 15.03.2004
Автор: Кателевський Микола Прокопович
МПК: B66F 3/00, B66B 9/16, B60P 1/02
Мітки: підйомник, пересувний
Формула / Реферат:
1. Пересувний підйомник, який містить опорну раму на колесах, вантажну площадку, шарнірно-важільний механізм типу "нюрнберзькі ножиці", силовий механізм підйому, який відрізняється тим, що в шарнірно-важільному механізмі нижня ланка нижнім шарніром з'єднана з опорною рамою, бокові шарніри нижньої ланки з’єднані віссю, яка опирається на підпірку для вантажу силового механізму підйому, а довжини важелів нижньої ланки, які з'єднані...
Гальмова важільна передача візка транспортного засобу

Номер патенту: 41819
Опубліковано: 10.06.2009
Автори: Клименко Ірина Володимирівна, Панасенко Віталій Якович
МПК: B61H 13/00
Мітки: важільна, транспортного, передача, засобу, візка, гальмова
Формула / Реферат:
Гальмова важільна передача візка транспортного засобу, яка має закріплений на рамі візка гальмовий циліндр, важелі, гальмові колодки, що передають зусилля на поверхню кочення колеса колісної пари, яка відрізняється тим, що на поперечині важільної передачі між колесами кожної колісної пари та в місцях приєднання важелів до рами візка з'єднання виконано сферичними кінематичними парами.
Підйомник
Номер патенту: 102461
Опубліковано: 10.07.2013
Автор: Ключковський Сергій Миронович
МПК: B66F 3/00
Мітки: підйомник
Формула / Реферат:
Підйомник, що містить опорну раму з приводом-гідроциліндром, напрямну зворотно-поступального руху, розташовану в площині опорної рами уздовж ходу штока гідроциліндра, два пантографи, кожний з яких має кілька пар перехрещених важелів, з'єднаних в місцях перехрещення циліндричними шарнірами, і кінцевий елемент, який відрізняється тим, що для приводу другого пантографа на опорній рамі встановлений окремий другий гідроциліндр, кінці всіх важелів...
Попередній патент: Двохвильовий лазерний допплерівський анемометр
Наступний патент: Труболовка волосюка
Випадковий патент: Пальчиковий зразок для випробування матеріалів на знос при терті ковзання