Підйомник
Формула / Реферат
Підйомник, що містить опорну раму з приводом-гідроциліндром, напрямну зворотно-поступального руху, розташовану в площині опорної рами уздовж ходу штока гідроциліндра, два пантографи, кожний з яких має кілька пар перехрещених важелів, з'єднаних в місцях перехрещення циліндричними шарнірами, і кінцевий елемент, який відрізняється тим, що для приводу другого пантографа на опорній рамі встановлений окремий другий гідроциліндр, кінці всіх важелів обох пантографів обладнані сферичними шарнірами як у послідовному з'єднанні між собою, так і у з'єднанні з напрямними опорної рами і у з'єднанні з напрямними кінцевого елемента, який виконаний з Н-подібною основою для утворення цих напрямних, в одному пантографі пари сферичних шарнірів на опорній рамі і на Н-подібній основі спряжені з їх напрямними і з гідроциліндром через повзуни, а в другому пантографі через повзуни спряжені з напрямними лише два сферичні шарніри, при цьому в приєднанні кінців важелів другого пантографа до опорної рами і до Н-подібної основи по одному сферичному шарніру з пари закріплено нерухомо, а осі циліндричних шарнірів у перехрещенні важелів протилежних пантографів зустрічно з'єднані проміжними сферичними шарнірами.
Текст
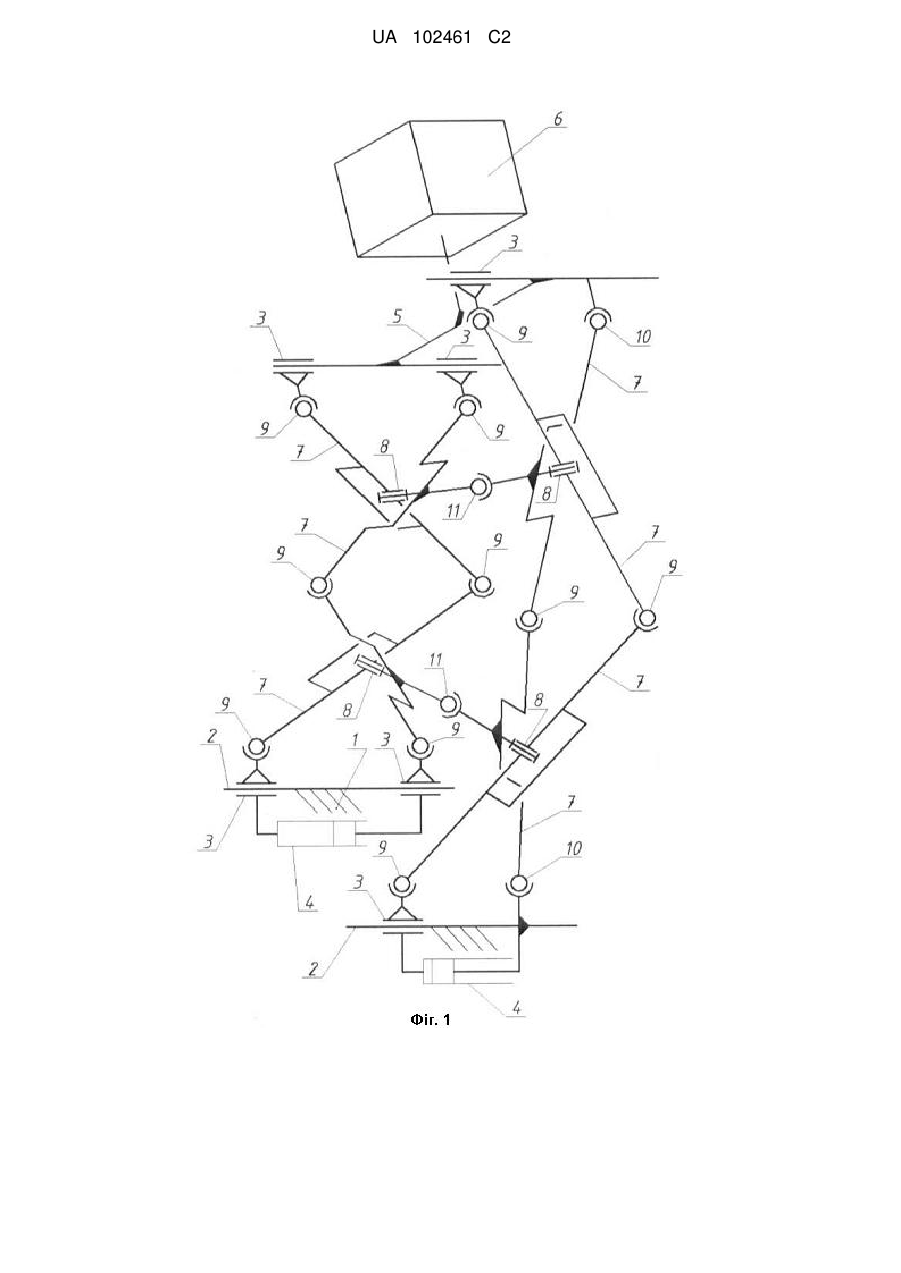
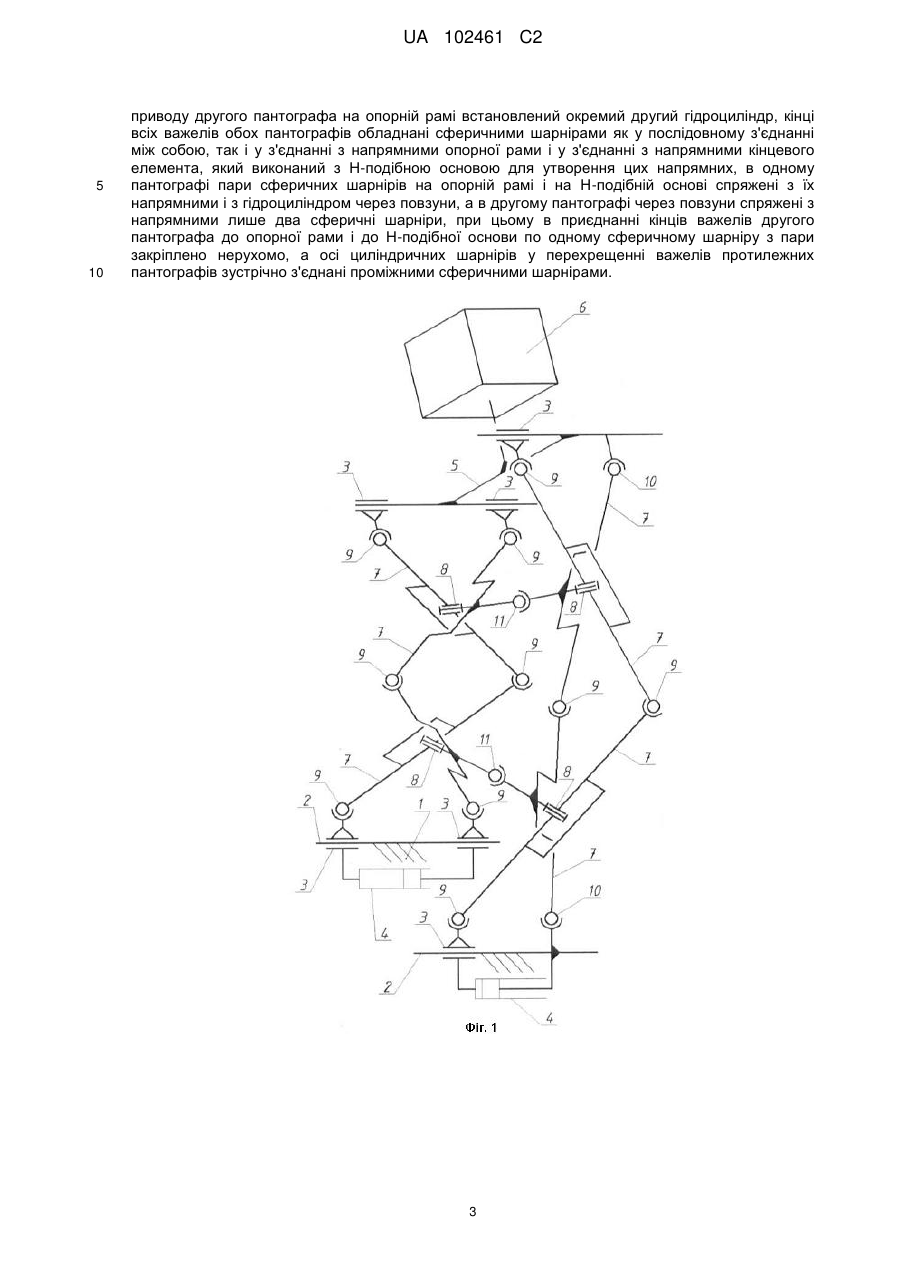
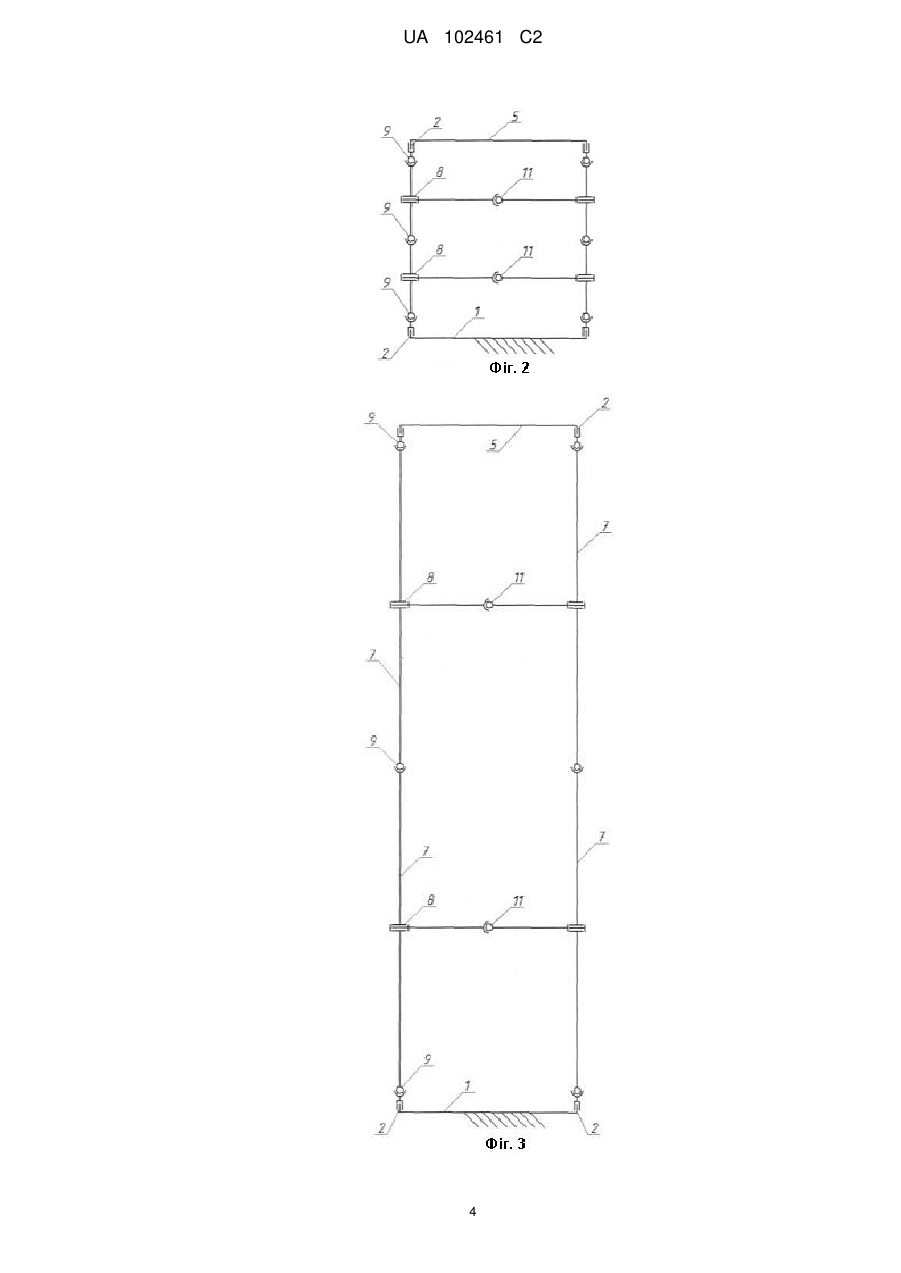
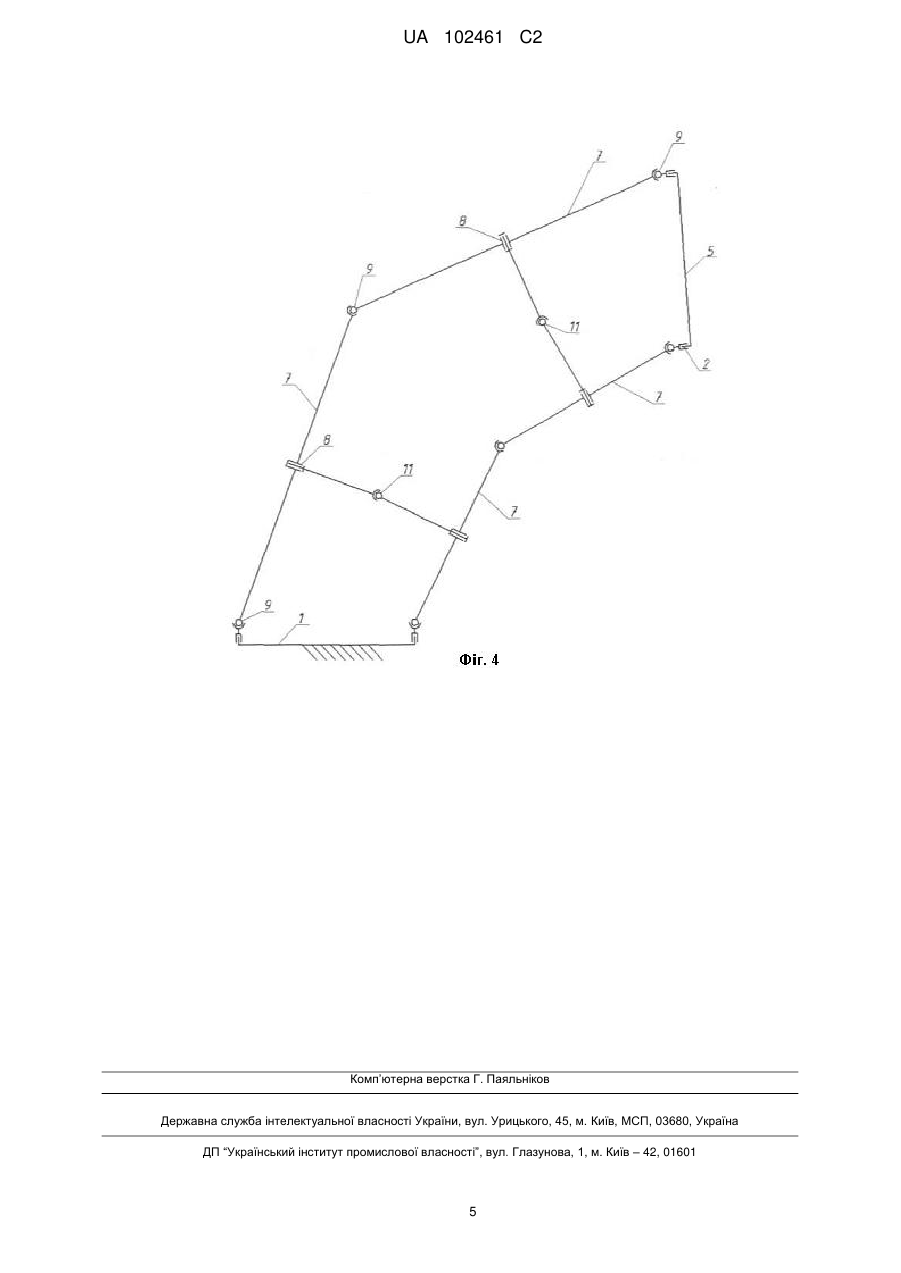
Реферат: Винахід належить до вантажно-підйомних машин. Підйомник містить опорну раму з приводом гідроциліндром, напрямну зворотно-поступального руху, розташовану в площині опорної рами уздовж ходу штока гідроциліндра, два пантографи, кожний з яких має кілька пар перехрещених важелів, з'єднаних в місцях перехрещення циліндричними шарнірами, і кінцевий елемент. Для приводу другого пантографа на опорній рамі встановлений окремий другий гідроциліндр. Кінці всіх важелів обох пантографів обладнані сферичними шарнірами як у послідовному з'єднанні між собою, так і у з'єднанні з напрямними опорної рами і у з'єднанні з напрямними кінцевого елемента. Останній виконаний з Н-подібною основою для утворення цих напрямних. В одному пантографі пари сферичних шарнірів на опорній рамі і на Н-подібній основі спряжені з їх напрямними і з гідроциліндром через повзуни, а в другому пантографі через повзуни спряжені з напрямними лише два сферичні шарніри. При приєднанні кінців важелів другого пантографа до опорної рами і до Н-подібної основи по одному сферичному шарніру з пари закріплено нерухомо. Осі циліндричних шарнірів у перехрещенні важелів протилежних пантографів зустрічно з'єднані проміжними сферичними шарнірами. Технічним результатом є забезпечення переміщення кінцевого елементу як в прямолінійному напрямі, так і за криволінійними траєкторіями. UA 102461 C2 (12) UA 102461 C2 UA 102461 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до вантажно-підйомних машин, в яких для зміни видовження відстані і напряму переміщення кінцевого елемента застосовані паралелограмні механізми чи пантографи, і може використовуватися також в маніпуляторах іншої робототехніки. Відомий як аналог підйомник, що містить основу з приводом-гідроциліндром і підйомну платформу, шарнірно з'єднану паралелограмним механізмом з другою підйомною платформою на протилежному кінці паралелограма, при цьому паралелограм центральними шарнірами змонтований на колоні, а довжина його важелів зліва і справа колони однакова, [див. опис винаходу України до патенту № 93771, кл. В66F 3/00, 2009 р. пріоритету]. При переміщенні гідроциліндром першої підйомної платформи паралелограмним механізмом одночасно переміщується друга підйомна платформа в протилежному напрямі відносно першої. Недоліком аналога є мала відстань переміщення другої підйомної платформи, як кінцевого елемента, обмежена довжиною ходу штока гідроциліндра і незмінною довжиною важелів паралелограмного механізму. Відома також, вибрана як прототип за більшістю співпадаючих суттєвих ознак, підйомна площадка, сполучена з опорною рамою через шарнірно-важільну систему, що містить паралельно розташовані пантографи, кожний з яких має кілька пар перехрещених важелів, з'єднаних циліндричними шарнірами, при цьому кожний пантограф має три вільні кінці важелів, один верхній кінець кожного пантографа шарнірно з'єднаний з підйомною площадкою, як з кінцевим елементом, та два нижніх кінці, один з яких шарнірно з'єднаний з опорною рамою, а другий - через ролик з напрямною опорної рами, виконаною в її площині з можливістю зворотнопоступального руху, циліндричні шарніри верхніх і нижніх важелів кожного пантографа розташовані на одній вертикалі, а нижні перехрещені важелі протилежних пантографів поперечно до осей їх циліндричних шарнірів у перехрещенні устатковані додатковими зовнішніми парами пантографа і з'єднані гвинтовим приводом синхронної зміни видовження всіх пантографів, [див. опис корисної моделі України до патенту № 66537А, кл. В66F 3/00, 2003 р. пріоритету]. В порівнянні з аналогом, прототип збільшує відстань переміщення підйомної площадки, як кінцевого елемента, відносно довжини ходу приводу кратно кількості перехрещених важелів в кожному пантографі, чим усувається недолік аналога. В процесі роботи прототипу зміна гвинтовим приводом кутів перехрещення нижніх важелів супроводжується аналогічною синхронною зміною цих кутів по всій висоті пантографів і їх видовженням по вертикалі з відповідним переміщенням підйомної площадки, як кінцевого елемента. Зворотний хід гвинтового приводу викликає зворотне переміщення кінцевого елемента. Недоліком прототипу є обмеження його функціональних можливостей, зумовлене переміщенням підйомної площадки, як кінцевого елемента, лише в прямолінійному напрямі. Задачею винаходу є розширення функціональних можливостей підйомника з забезпеченням переміщення кінцевого елемента як в прямолінійному напрямі, так і за криволінійними траєкторіями для двокоординатного маніпулювання кінцевим елементом. Для вирішення поставленої задачі запропонована конструкція підйомника поряд з суттєвими ознаками, властивими для прототипу, такими як опорна рама з приводом гідроциліндром, напрямна зворотно-поступального руху розташована в площині опорної рами уздовж ходу штока гідроциліндра, два пантографи, кожний з яких має кілька пар перехрещених важелів, з'єднаних в місцях перехрещення циліндричними шарнірами, і кінцевий елемент, містить нові, відмінні від прототипу суттєві ознаки, а саме - для приводу другого пантографа на опорній рамі встановлений окремий другий гідроциліндр, кінці всіх важелів обох пантографів обладнані сферичними шарнірами як у послідовному з'єднанні між собою, так і у з'єднанні з напрямними опорної рами і у з'єднанні з напрямними кінцевого елемента, виконаного з Н-подібною основою для створення цих напрямних, в одному пантографі пари сферичних шарнірів на опорній рамі і на Н-подібній основі спряжені з їх напрямними і з гідроциліндрами через повзуни, а в другому пантографі через повзуни спряжені з напрямними лише два сферичні шарніри, при цьому в приєднанні кінців важелів другого пантографа до опорної рами і до Н-подібної основи по одному сферичному шарніру з пари закріплено нерухомо, а осі циліндричних шарнірів у перехрещенні важелів протилежних пантографів зустрічно з'єднані проміжними сферичними шарнірами. Система управління гідроциліндрів уможливлює синхронний або несинхронний хід їх штоків. З ідентичного початкового стану обох складених пантографів синхронним ходом штоків гідроциліндрів забезпечують прямолінійне переміщення кінцевого елемента внаслідок синхронної зміни кутів між важелями обох пантографів в паралельних площинах при видовженні чи складанні підйомника. Переміщення кінцевого елемента за криволінійною 1 UA 102461 C2 5 10 15 20 25 30 35 40 45 50 55 60 траєкторією здійснюють не синхронним ходом штоків гідроциліндрів з різницею відстані між парою повзунів зі сферичними шарнірами на опорній рамі одного пантографа і відстані між повзуном зі сферичним шарніром і нерухомим сферичним шарніром другого пантографа на опорній рамі. Внаслідок різниці цих відстаней кути між перехрещеними важелями одного пантографа є більшими за аналогічні кути другого пантографа, відповідно, видовження між опорною рамою і напрямною Н-подібної основи одного пантографа є меншим за аналогічне видовження другого пантографа і підйомник згинається в сферичних шарнірах пантографів в сторону коротшого з них, при цьому ширина проміжку між пантографами зберігається постійною завдяки їх з'єднанню проміжними сферичними шарнірами. Зворотний хід кінцевого елемента за криволінійною траєкторією здійсняють зворотним не синхронним ходом штоків гідроциліндрів, управлінням якими досягають згину підйомника вліво чи вправо. Отже, нова сукупність суттєвих ознак, в порівнянні з прототипом, розширює функціональні можливості підйомника в частині двокоординатного маніпулювання кінцевим елементом у відповідності до задачі винаходу, т. я. запропонований пантографний просторовий підйомник внаслідок гнучкості може використовуватися для виконання специфічних операцій з переміщення вантажів, наприклад, для роботи нижче рівня землі, до огинання горизонтальних перешкод, при рятувальних роботах та ін. Суть винаходу пояснюється кресленнями, де: на фіг. 1 зображена загальна кінематична схема підйомника; на фіг. 2 - кінематична схема несучої частини складеного підйомника, вид зліва; на фіг. 3 - те ж саме, для прямолінійно видовженого підйомника; на фіг. 4 - те ж саме, для зігнутого підйомника. Опорна рама 1 (фіг. 1) підйомника виконана з парою паралельних напрямних 2, спряжених з можливістю зворотно-поступального руху з трьома повзунами 3. По одному повзуну 3 обох напрямних 2 з'єднані з корпусами гідроциліндрів 4, ще один повзун 3 з'єднаний зі штоком одного гідроциліндра 4. Ідентичними напрямними 2 з трьома повзунами 3 обладнана Н-подібна основа 5 кінцевого елемента 6 підйомника. Опорна рама 1 та Н-подібна основа 5 сполучені двома пантографами, кожний з яких складається з двох пар перехрещених важелів 7, а кожна їх пара у перехрещенні важелів з'єднана циліндричним шарніром 8. Зустрічні кінці важелів 7 кожної пари послідовно з'єднані сферичними шарнірами 9. Протилежні кінці важелів 7 обох пантографів також устатковані сферичними шарнірами 9, встановленими на парах повзунів 3 опорної рами 1 та Н-подібної основи 5 одного пантографа і на одиничних повзунах 3 опорної рами 1 та Нподібної основи 5 другого пантографа, при цьому в приєднанні кінців важелів 7 другого пантографа до опорної рами 1 та до Н-подібної основи 5 по одному сферичному шарніру 10 закріплено нерухомо. Осі циліндричних шарнірів 8 у перехрещенні важелів 7 протилежних пантографів зустрічно з'єднані проміжними сферичними шарнірами 11. Система управління гідроциліндрів 4 уможливлює синхронний або несинхронний хід їх штоків. З однакового початкового стану обох складених пантографів (фіг. 2) синхронним ходом штоків гідроциліндрів 4 (фіг. 1) забезпечують прямолінійне переміщення (фіг. 3) Н-подібної основи 5 з кінцевим елементом 6 (фіг. 1) внаслідок синхронної зміни кутів між важелями 7 обох пантографів в паралельних площинах при видовженні чи складанні підйомника. Переміщення Н-подібноі основи 5 за криволінійною траєкторією (фіг. 4) здійснюють несинхронним ходом штоків гідроциліндрів 4 (фіг. 1) з різницею відстані між парою повзунів 3 зі сферичними шарнірами 9 на опорній рамі 1 і одного пантографа і відстані між повзуном 3 зі сферичним шарніром 9 і нерухомим шарніром 10 другого пантографа на опорній рамі 1. Внаслідок різниці цих відстаней кути між перехрещеними важелями 7 одного пантографа є більшими за аналогічні кути другого пантографа, відповідно, видовження між опорною рамою 1 та Нподібною основою 5 одного пантографа є меншим за аналогічне видовження другого пантографа і підйомник згинається у сферичних шарнірах 9 пантографів в сторону коротшого з них, при цьому ширина проміжку між ними зберігається постійною завдяки їх з'єднанню проміжними сферичними шарнірами 11. Зворотний хід кінцевого елемента 6 за криволінійною траєкторією здійснюють зворотним несинхронним ходом штоків гідроциліндрів 4, управлінням якими досягають згину підйомника як вліво, так і вправо. ФОРМУЛА ВИНАХОДУ Підйомник, що містить опорну раму з приводом-гідроциліндром, напрямну зворотнопоступального руху, розташовану в площині опорної рами уздовж ходу штока гідроциліндра, два пантографи, кожний з яких має кілька пар перехрещених важелів, з'єднаних в місцях перехрещення циліндричними шарнірами, і кінцевий елемент, який відрізняється тим, що для 2 UA 102461 C2 5 10 приводу другого пантографа на опорній рамі встановлений окремий другий гідроциліндр, кінці всіх важелів обох пантографів обладнані сферичними шарнірами як у послідовному з'єднанні між собою, так і у з'єднанні з напрямними опорної рами і у з'єднанні з напрямними кінцевого елемента, який виконаний з Н-подібною основою для утворення цих напрямних, в одному пантографі пари сферичних шарнірів на опорній рамі і на Н-подібній основі спряжені з їх напрямними і з гідроциліндром через повзуни, а в другому пантографі через повзуни спряжені з напрямними лише два сферичні шарніри, при цьому в приєднанні кінців важелів другого пантографа до опорної рами і до Н-подібної основи по одному сферичному шарніру з пари закріплено нерухомо, а осі циліндричних шарнірів у перехрещенні важелів протилежних пантографів зустрічно з'єднані проміжними сферичними шарнірами. 3 UA 102461 C2 4 UA 102461 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюLift device
Автори англійськоюKliuchkovskyi Serhii Myronovych
Назва патенту російськоюПодъемник
Автори російськоюКлючковский Сергей Миронович
МПК / Мітки
МПК: B66F 3/00
Мітки: підйомник
Код посилання
<a href="https://ua.patents.su/7-102461-pidjjomnik.html" target="_blank" rel="follow" title="База патентів України">Підйомник</a>
Будівельний підйомник
Номер патенту: 61633
Опубліковано: 25.07.2011
Автор: Коваль Віталій Іванович
МПК: B66B 9/00
Мітки: підйомник, будівельний
Формула / Реферат:
Будівельний підйомник, що містить щоглу, каретку з приводом її переміщення вздовж щогли, розміщену на каретці вантажну платформу з можливістю її переміщення поперек щогли, який відрізняється тим, що на каретці на одному валу з барабаном механізму висування платформи встановлено зубчасте колесо, яке знаходиться в зачепленні з вертикальною зубчастою рейкою до кінців якої приєднаний канат, який охоплює два блоки, розміщені відповідно на вершині...
Пересувний підйомник
Номер патенту: 64758
Опубліковано: 15.03.2004
Автор: Кателевський Микола Прокопович
МПК: B60P 1/02, B66B 9/16, B66F 3/00
Мітки: підйомник, пересувний
Формула / Реферат:
1. Пересувний підйомник, який містить опорну раму на колесах, вантажну площадку, шарнірно-важільний механізм типу "нюрнберзькі ножиці", силовий механізм підйому, який відрізняється тим, що в шарнірно-важільному механізмі нижня ланка нижнім шарніром з'єднана з опорною рамою, бокові шарніри нижньої ланки з’єднані віссю, яка опирається на підпірку для вантажу силового механізму підйому, а довжини важелів нижньої ланки, які з'єднані...
Підйомник
Номер патенту: 93771
Опубліковано: 10.03.2011
Автори: Жулінський Євгеній Миколайович, Федоренко Сергій Володимирович, Міщенко Олександр Іванович
Мітки: підйомник
Формула / Реферат:
Підйомник, що має основу та першу підйомну платформу, шарнірно з'єднані між собою за допомогою пар важелів, та гідроциліндр, зв'язаний з основою, який відрізняється тим, що його підйомна частина виконана у вигляді шарнірного паралелограма, що має два різновисотні шарніри у середній частині паралелограма з опорою на опорні колони, крім того підйомник має другу підйомну платформу, розташовану симетрично першій відносно точок опори шарнірного...
Підйомник
Номер патенту: 98189
Опубліковано: 25.04.2012
Автори: Малахов Олексій Олександрович, Міщенко Олександр Іванович, Федоренко Сергій Володимирович, Реутова Анастасія Миколаївна
МПК: B66F 3/00
Мітки: підйомник
Формула / Реферат:
Підйомник, що містить плити, шарнірно з'єднані між собою за допомогою важелів, при цьому дві пари важелів, шарнірно з'єднаних з відповідною плитою, та пару паралельних їм важелів, в якій кожний шарнірно одним кінцем прикріплений до відповідної плити, який відрізняється тим, що вищеназвані дві пари важелів кінцями, протилежними до кінців, поєднаних з плитою, шарнірно з'єднані з двома важелями довжиною у два рази більшою, ніж кожна з ланок...
Підйомна платформа
Номер патенту: 66537
Опубліковано: 17.05.2004
Автор: Радченко Георгій Федорович
МПК: B66F 3/00
Формула / Реферат:
1. Підйомна платформа, яка містить раму та підйомну площадку, з'єднані між собою просторовою шарнірно-важільною системою, важелі якої взаємозв'язані з утворенням пантографів, розташованих паралельно та шарнірно зв'язаних вільними кінцями важелів з підйомною площадкою та рамою, причому один важіль кожного пантографа з'єднаний з горизонтальною напрямною рами, і привід підйому підйомної площадки, яка відрізняється тим, що містить не менше трьох...
Попередній патент: Очисник головок коренеплодів
Наступний патент: Учбовий тренажер котельної установки
Випадковий патент: Спосіб дозування місцевого анестетика ропівакаїну для тривалої післяопераційної епідуральної аналгезії в онкохірургії травного тракту у хворих похилого віку