Електроциліндр із засобом обмеження навантаження та ракета з соплом, керованим таким електроциліндром
Номер патенту: 111636
Опубліковано: 25.05.2016
Автори: Абенсюр Тьєрі, Верньоль Алізе, Піньї Жеральд, Перес-Д'яго Сусана
Формула / Реферат
1. Електромеханічний привод (10), призначений для переміщення першого елемента відносно другого елемента і який містить рухомий елемент (14), забезпечений сполучним елементом (20) для кріплення до першого елемента, та оправу (12), забезпечену кріпильним пристроєм (22) для кріплення до другого елемента, при цьому рухомий елемент (14) має можливість поступального переміщення відносно оправи, який відрізняється тим, що він додатково містить принаймні одну поглинаючу/розсіюючу механічну енергію структуру (28, 30), розташовану на шляху передачі зусиль між першим елементом і оправою (12) приводу (10) і яка містить камеру, що деформується, яка вміщає принаймні одну пористу капілярну матрицю (40) з відкритими порами і відповідну рідину (42), кут змочування якої більший 90° відносно матриці (40) і яка вибрана таким чином, що принаймні частина зазначеної рідини (42) має можливість проникнення в пори матриці (40), коли на камеру діє зовнішній механічний тиск, що дорівнює або вищий за перший рівень тиску Р1, і самостійного виходу з пор матриці (40) під дією капілярних сил, коли на камеру діє зовнішній механічний тиск, нижчий, ніж другий рівень тиску Р2, який нижчий за перший рівень тиску Р1.
2. Привод за п. 1, який відрізняється тим, що одна або кожна поглинаюча/розсіююча енергію структура (28, 30) приводу (10) розташована усередині порожнини (26), через яку проходить принаймні частина рухомого елемента (14) приводу (10), і знаходиться між стінкою (32, 34) порожнини (26) і засобами (36, 36а, 36b, 60, 62) передачі навантаження, що чинять тиск на камеру, що деформується, поглинаючої/розсіюючої енергію структури (28, 30) для передачі зусиль від першого елемента до оправи (12) приводу (10).
3. Привод за п. 2, який відрізняється тим, що засоби (36, 36a, 36b) передачі навантаження встановлені на рухомому елементі (14).
4. Привод за п. 3, який відрізняється тим, що сполучний елемент (20) рухомого елемента (14), призначений для з'єднання з першим елементом, містить порожнистий корпус (24), який встановлений з можливістю ковзання на рухомому елементі (14) і усередині якого знаходиться порожнина (26).
5. Привод за п. 3, який відрізняється тим, що оправа (12) містить порожнистий корпус (54), усередині якого знаходиться порожнина (26), при цьому усередині даної порожнини (26) жорстко закріплений приводний пристрій (16) для приводу рухомого елемента (14).
6. Привод за п. 2, який відрізняється тим, що оправа (12) містить порожнистий корпус (54), усередині якого знаходиться порожнина (26), при цьому засоби (60, 62) передачі навантаження служать опорою для приводного пристрою (16), призначеного для переміщення рухомого елемента (14) усередині зазначеної порожнини (26).
7. Привод за п. 5, який відрізняється тим, що засіб передачі навантаження містить одну або декілька пластин (36а, 36b, 60, 62), що мають можливість взаємодії, відповідно, з однією з або кожною з поглинаючих/розсіюючих енергію структур (28, 30), при цьому кожна з зазначених пластин встановлена між приводним пристроєм (16) і відповідною поглинаючою/розсіюючою енергію структурою (28, 30).
8. Привод за п. 2, який відрізняється тим, що
принаймні одна з поглинаючих/розсіюючих механічну енергію структур містить дві поглинаючі/розсіюючі енергію структури (28, 30), кожна з яких розташована на відповідному шляху передачі зусиль між першим елементом і оправою (12) приводу (10) та містить камеру, що деформується, яка вміщає
принаймні одну пористу капілярну матрицю (40) з відкритими порами і відповідну рідину (42), яка має кут змочування, більший 90° відносно зазначеної матриці (40), і яка вибирається так, щоб принаймні частина рідини (42) мала можливість проникнення в пори матриці (40), коли матриця піддається дії зовнішнього механічного тиску, вищого за перший рівень тиску Р1, і самостійного виходу з пор матриці (40) під дією капілярних сил, коли на матрицю діє зовнішній механічний тиск, нижчий другого рівня тиск Р2, причому другий рівень тиску Р2 менший першого рівня тиску Р1; при цьому поглинаючі/розсіюючі енергію структури (28, 30) розташовані з обох боків від засобу (36, 36а, 36b, 60, 62) передачі навантаження таким чином, що перший елемент має можливість зсуву поглинаючих/розсіюючих енергію структур (28, 30) в двох взаємно протилежних напрямках (64, 66).
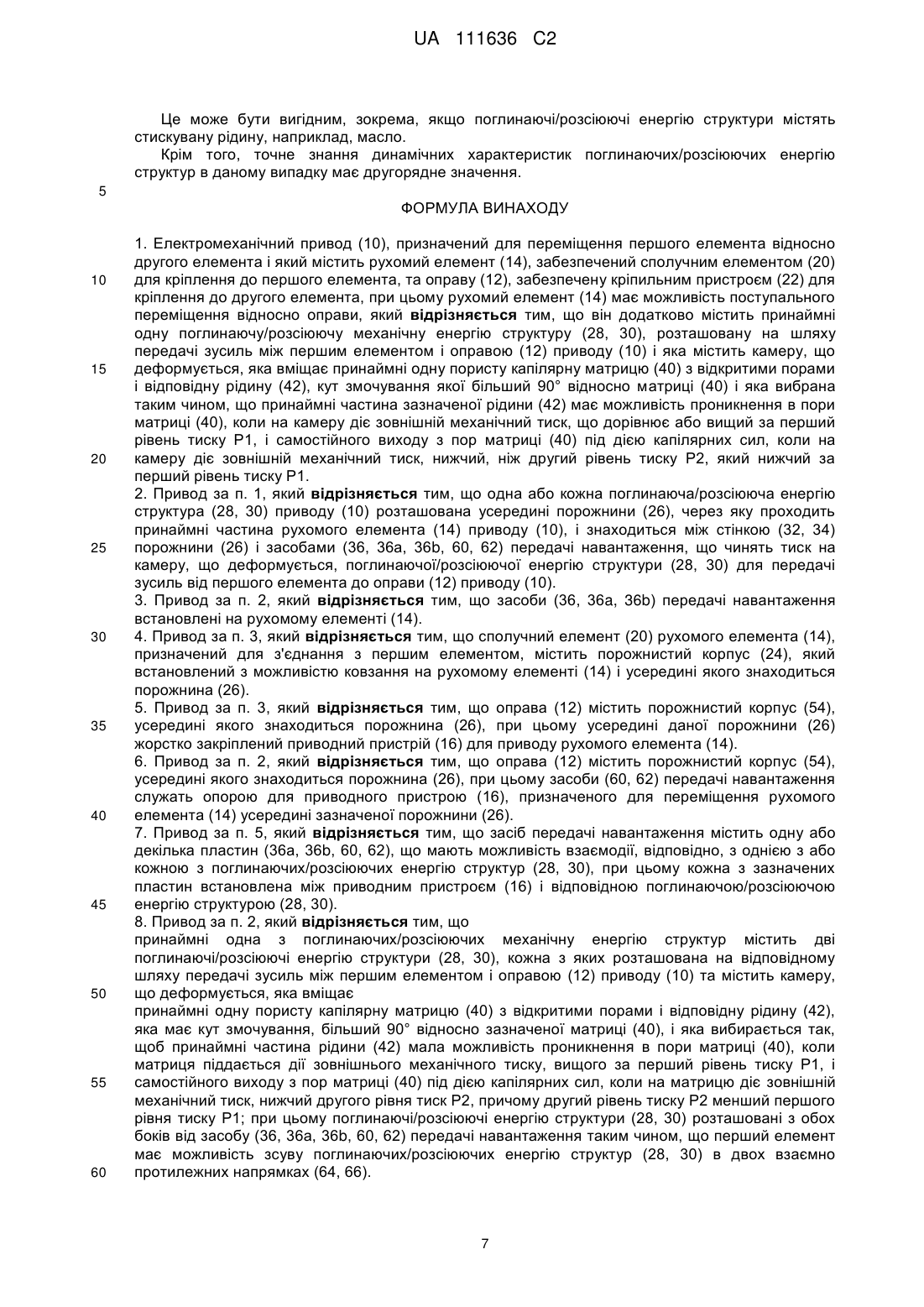
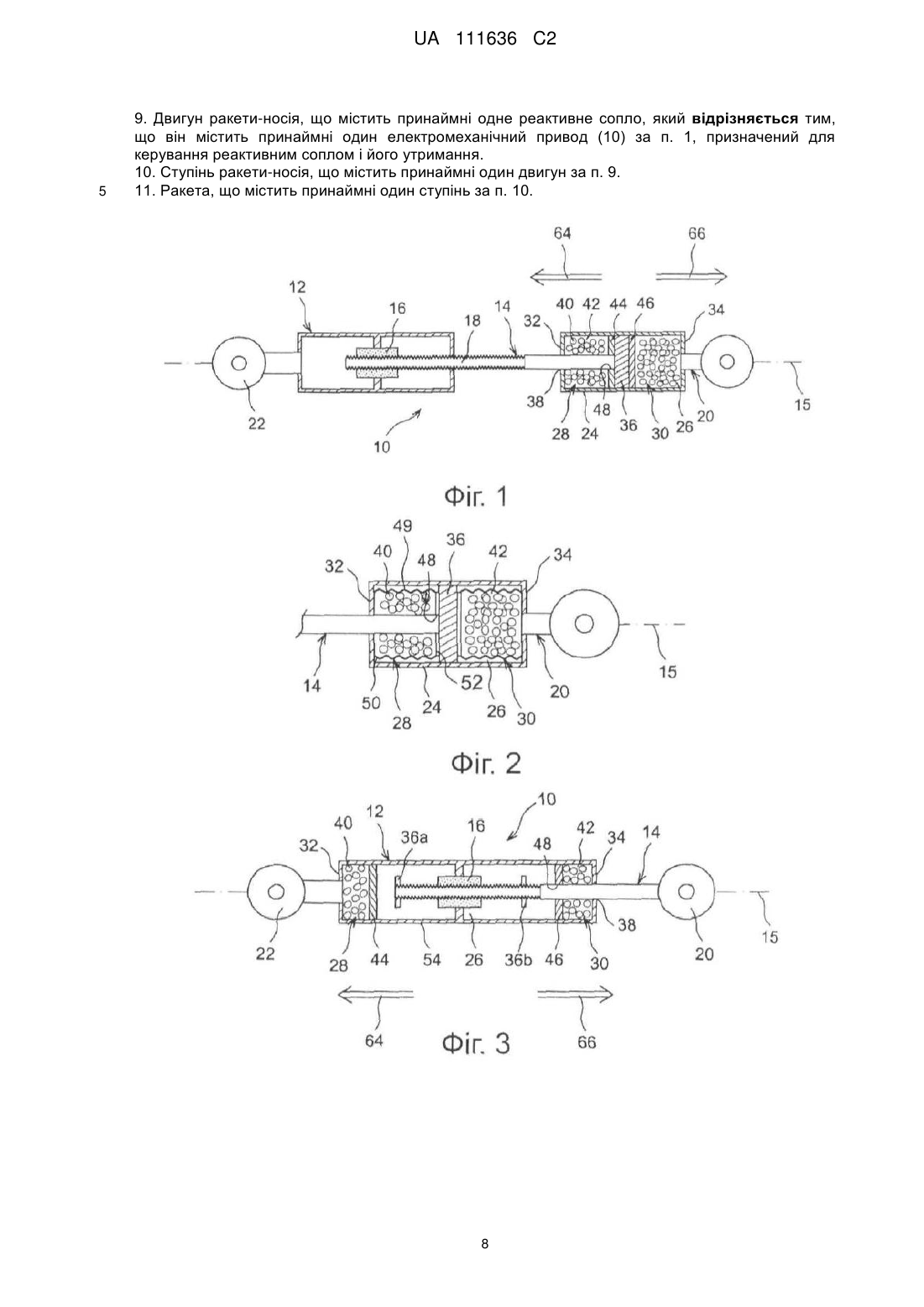
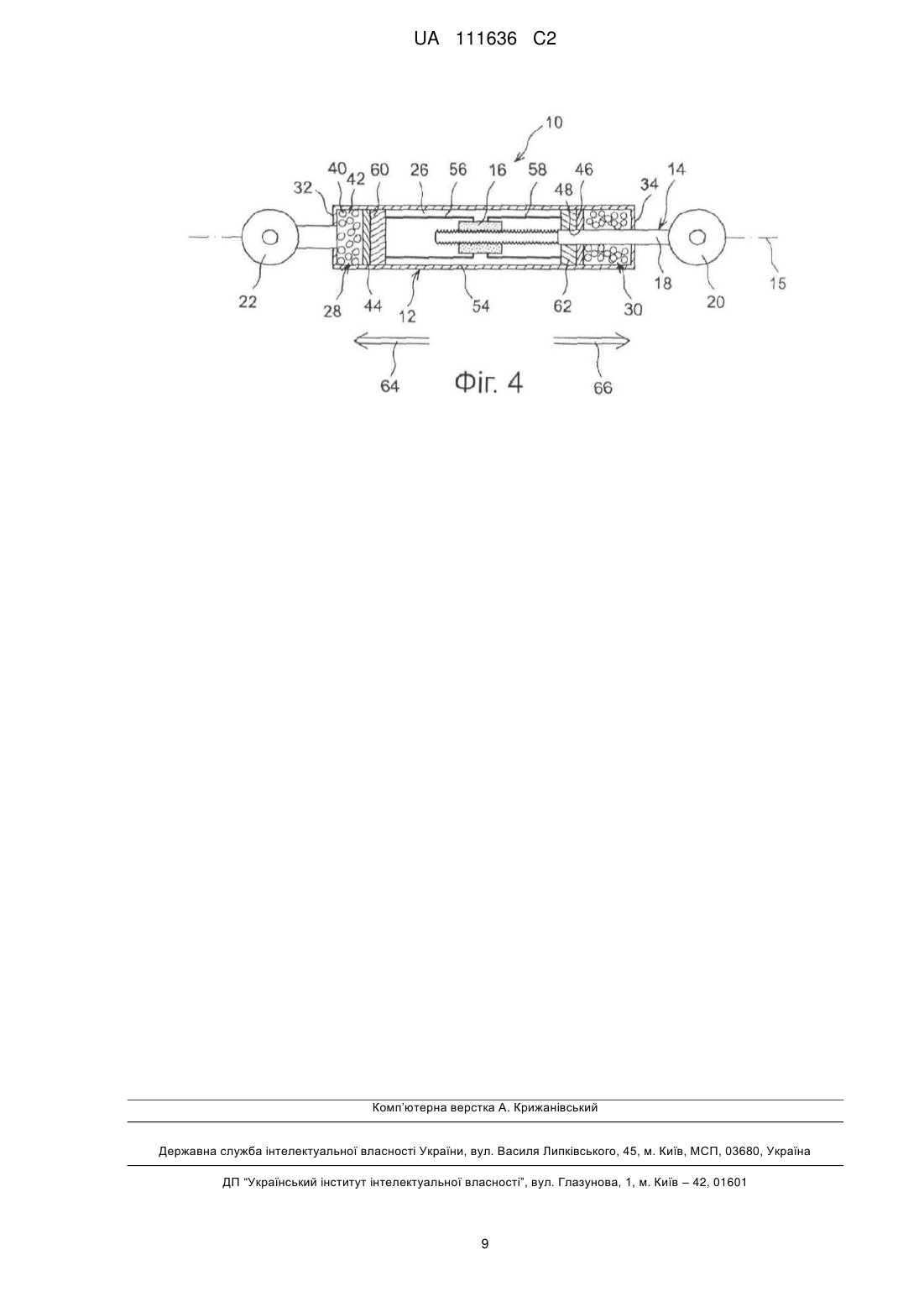
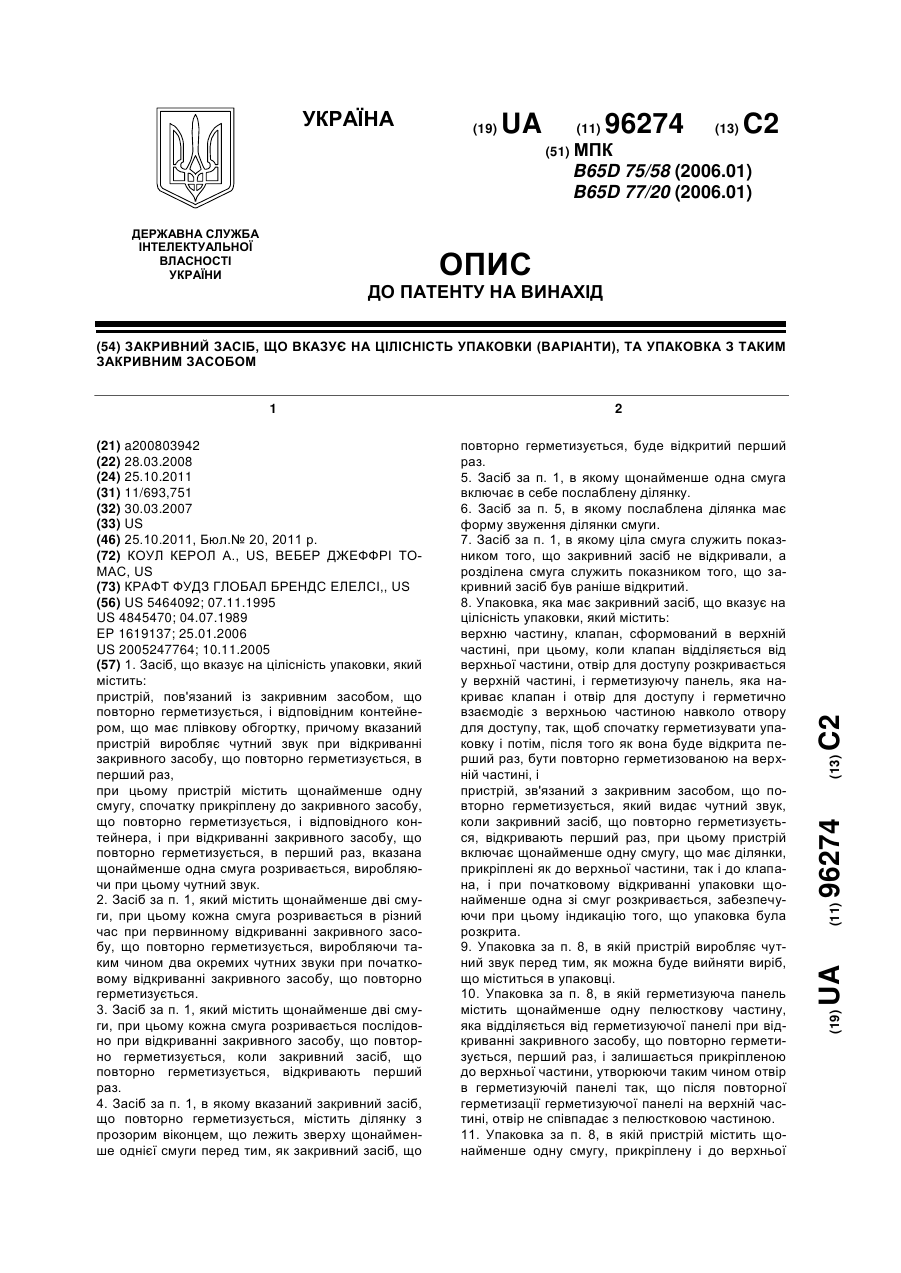
9. Двигун ракети-носія, що містить принаймні одне реактивне сопло, який відрізняється тим, що він містить принаймні один електромеханічний привод (10) за п. 1, призначений для керування реактивним соплом і його утримання.
10. Ступінь ракети-носія, що містить принаймні один двигун за п. 9.
11. Ракета, що містить принаймні один ступінь за п. 10.
Текст
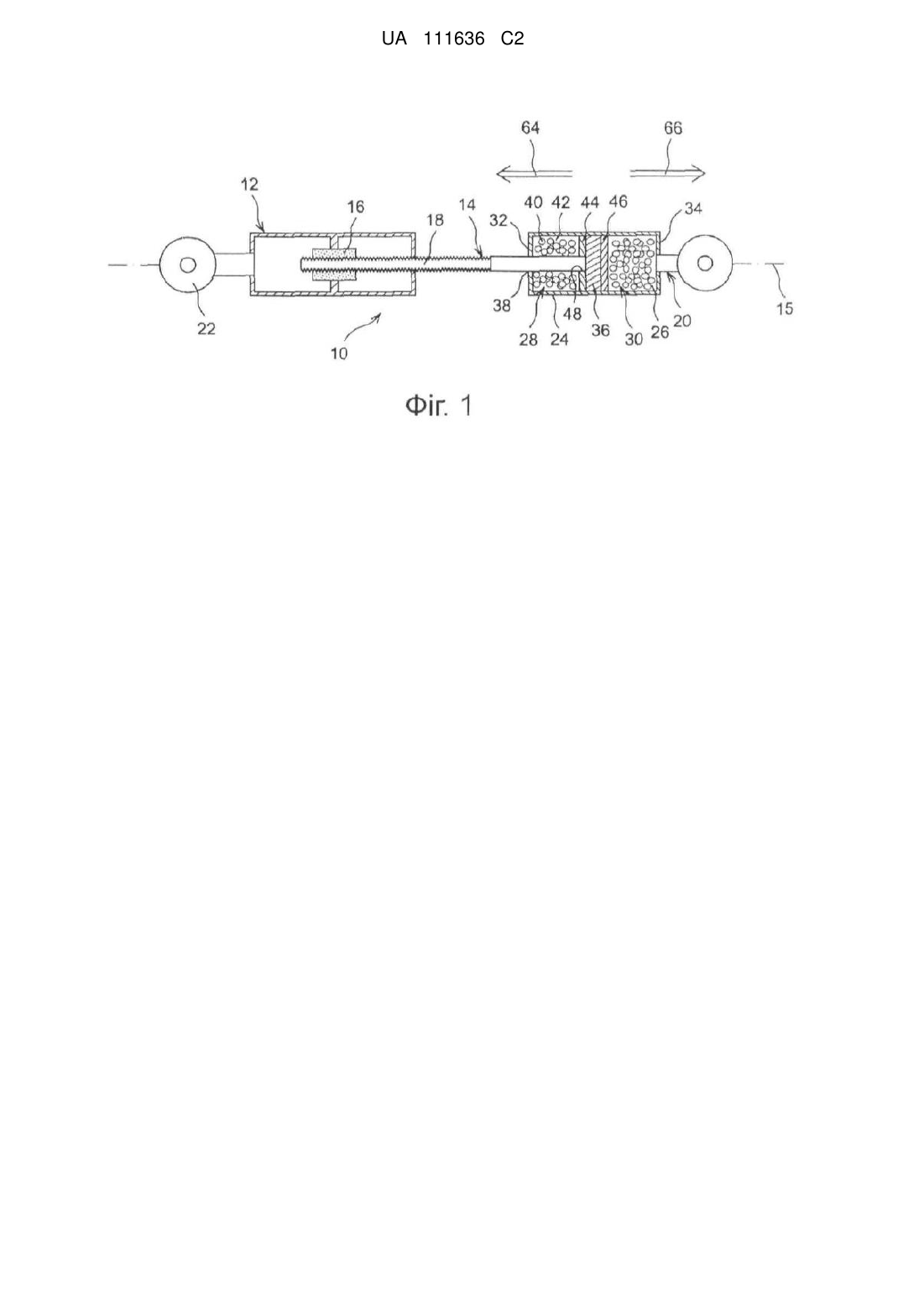
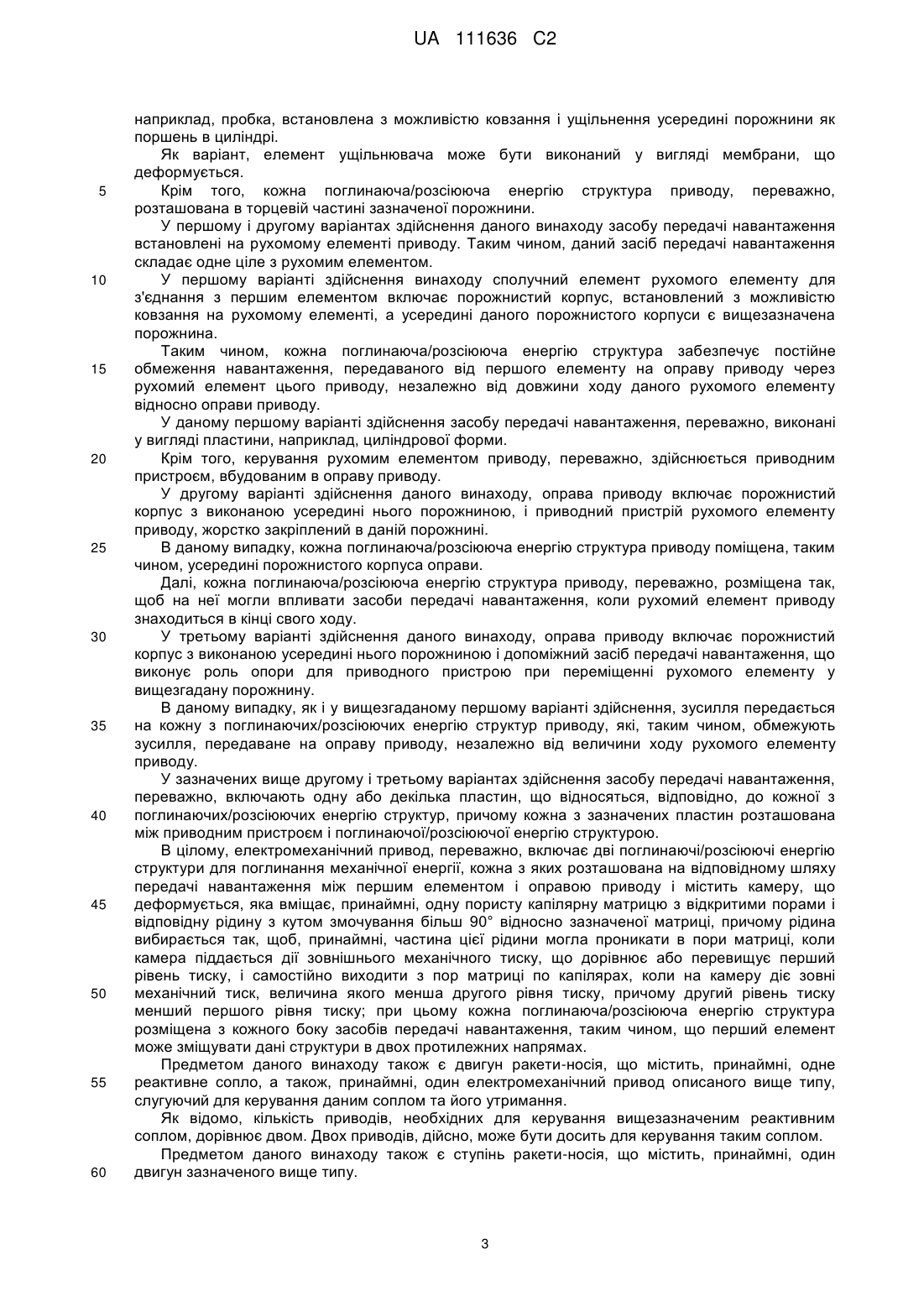
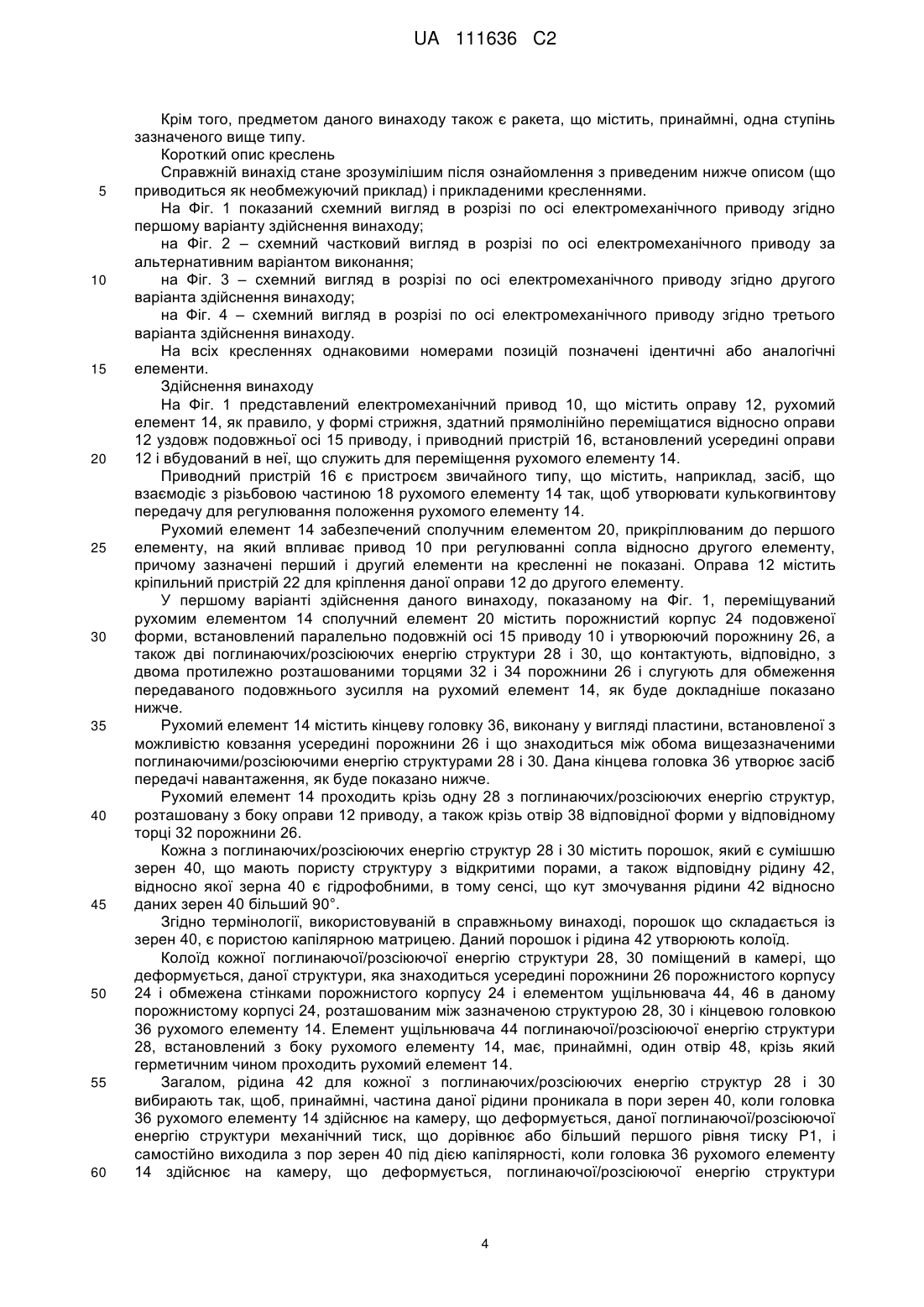
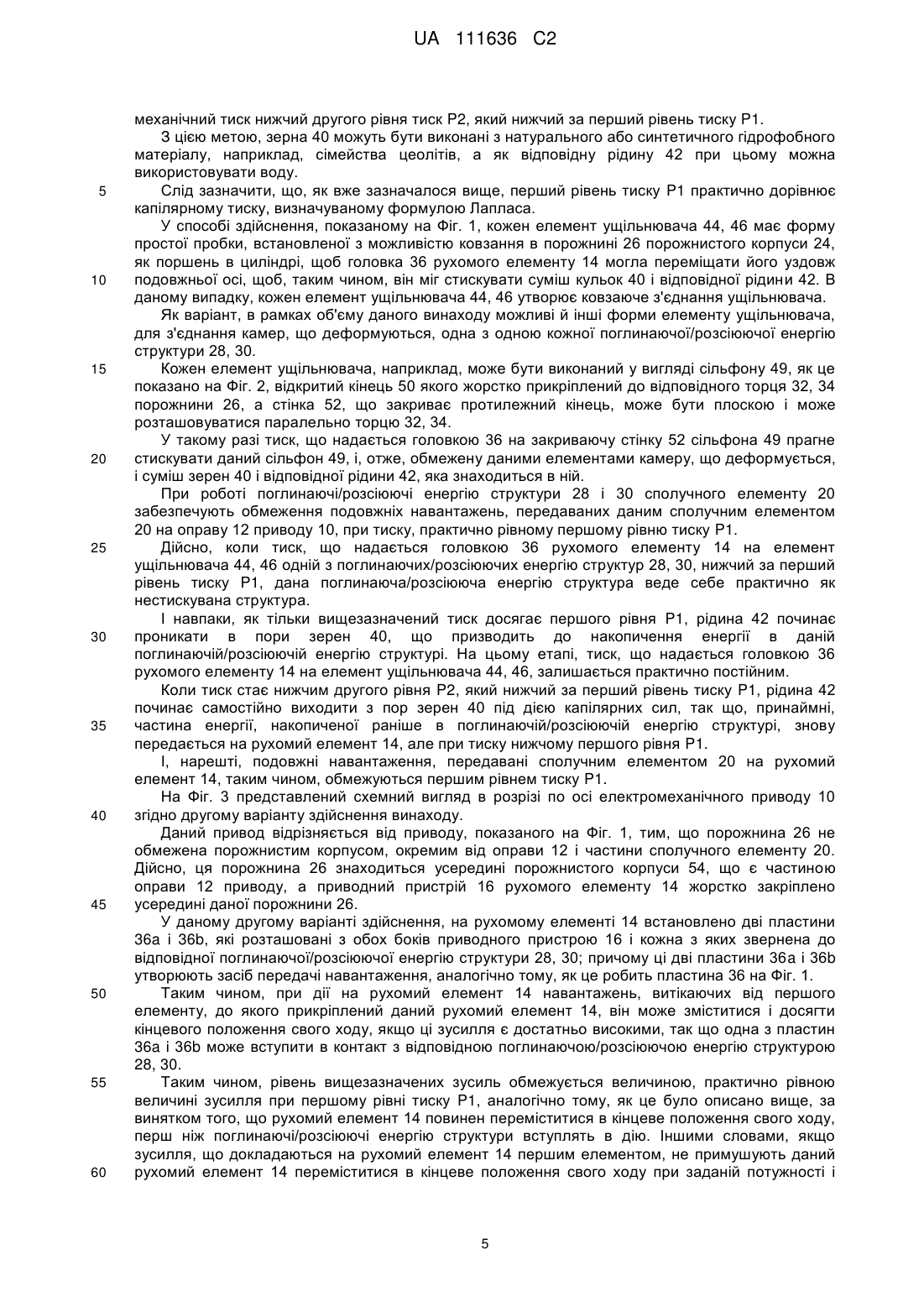
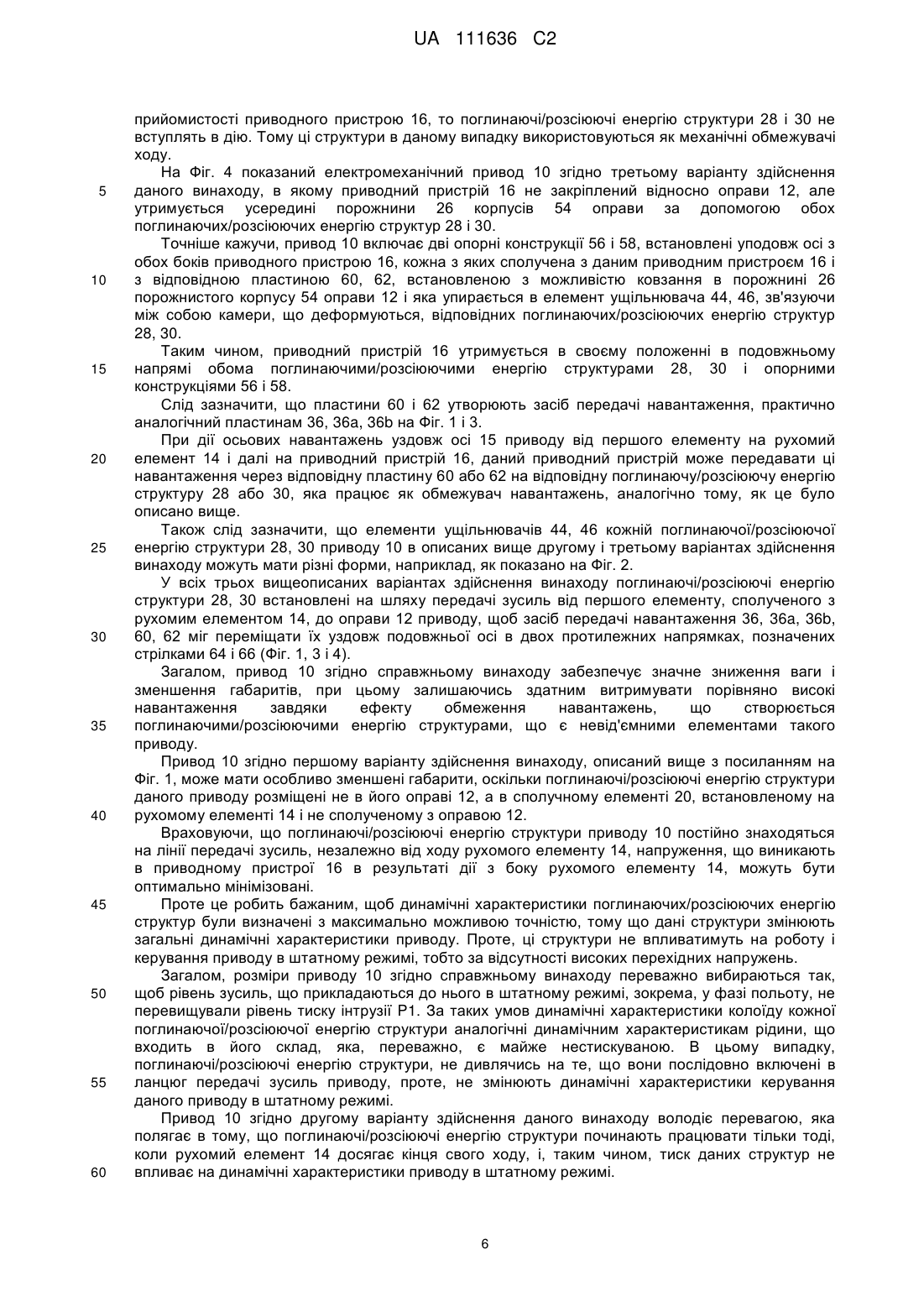
Реферат: Електромеханічний привод (10), що містить рухомий елемент (14), забезпечений сполучним елементом (20) і здатний поступально переміщатися відносно оправи (12), і поглинаючу/розсіюючу енергію структуру (28, 30), розташовану на шляху передачі зусиль між сполучним елементом (20) і оправою (12), яка містить пористу капілярну матрицю (40) з відкритою пористістю і відповідну рідину (42), яка має кут змочування, більший 90° відносно зазначеної матриці (40), і вибирається так, щоб частина рідини (42) проникала в пори матриці (40), коли на дану камеру діє тиск, вищий першого рівня тиску Р1, і самостійно виходила з пор матриці (40) під дією капілярних сил, коли на структуру діє тиск, нижчий другого рівня тиск Р2, причому другий рівень тиску Р2 нижчий за перший рівень тиску Р1. UA 111636 C2 (12) UA 111636 C2 UA 111636 C2 5 10 15 20 25 30 35 40 45 50 55 60 Область техніки, до якої відноситься винахід Даний винахід в цілому відноситься до області електричних приводів. Конкретніше, але не виключно, воно відноситься до електроприводу для керування реактивним соплом двигуна ракети-носія. Рівень техніки Двигуни ракет-носіїв включають регульоване реактивне сопло, що служить для направлення в потрібному напрямку струменя газів з камери згорання даних двигунів, дозволяючи, таким чином, регулювати напрям створюваного гарячим газом реактивного струменя, і, отже, тяги двигуна, з метою керування траєкторією руху ракети-носія. Керування соплом двигуна ракети-носія, як правило, здійснюється прикріпленими до двигуна циліндрами керування; зазвичай застосовуються два таких керуючих циліндра. Після запуску двигуна або його відключення у разі перерваного запуску, поле тиску усередині двигуна не є осесиметричним протягом короткого проміжку часу близько декількох секунд, внаслідок чого виникає обертовий момент, що впливає на двигун і створює порівняно інтенсивні навантаження, що діють на керуючі циліндри сопла. Оскільки максимальний рівень цих навантажень досить точно передбачити неможливо, розміри приводів доводиться збільшувати вище потрібних з метою задоволення вимог з техніки безпеки, що є небажаним з погляду ваги і вартості літального апарату. Крім того, використання гідравлічних приводів призводить до порівняно високих передполітних витрат на впровадження, і тому було б бажано мати можливість замінити їх електроприводами, витрати на впровадження яких нижчі. Крім того, для пристроїв такого типу в даний час є достатньо легкі і малогабаритні джерела електричного живлення. Проте розміри електромеханічних приводів доводиться вибирати значно завищеними, щоб вони могли витримувати перехідні навантаження зазначеного вище типу, і при цьому існує ризик їх заклинювання, що робить дане технічне рішення неприйнятним. Таким чином, існує необхідність створення нового типу електромеханічного приводу, що є достатньо легким і малогабаритним, але в той же час здатним витримувати порівняно високі механічні навантаження. Розкриття винаходу Завдання даного винаходу полягає, зокрема, в створенні простого, економічного і ефективного технічного вирішення описаної вище проблеми. Конкретним завданням даного винаходу є створення електромеханічного приводу, здатного витримувати дію порівняно високих навантажень, таких, як навантаження, передавані від реактивного сопла ракети-носія на керуючі циліндри даного сопла при роботі двигуна на землі, зокрема, під час запуску та у разі переривання запуску. Для вирішення зазначеного завдання справжній винахід пропонує електромеханічний привод, призначений для переміщення першого елементу відносно другого елементу і який містить рухомий елемент, забезпечений сполучним елементом, що прикріплюється до першого елементу, і оправу, забезпечену кріпильним пристроєм для кріплення до другого елементу, причому рухомий елемент здійснює прямолінійний рух відносно оправи. Згідно справжньому винаходу, даний привод також включає, принаймні, одну поглинаючу/розсіюючу механічну енергію структуру, розташовану на шляху передачі напруження між першим елементом та оправою приводу і містить камеру, що деформується, яка вміщає, принаймні, одну пористу капілярну матрицю і відповідну рідину з кутом змочування більш 90° відносно зазначеної матриці, причому зазначена рідина вибирається так, щоб, принаймні, частина цієї рідини могла проникати в пори матриці, коли камера піддається дії зовнішнього механічного тиску, що дорівнює або перевищує перший рівень тиску, і довільно виходити з пор матриці по капілярах, коли на камеру діє зовні механічний тиск, величина якого менша другого рівня тиск, причому другий рівень тиску менший першого рівня тиску. Приклади поглинаючих/розсіюючих енергію структур такого типу детальніше описуються в патентній заявці WO 96/18040. Як правило, в поглинаючих/розсіюючих енергію структурах такого типу використовується принцип поверхневого натягнення рідини на межі розділу між рідиною і матеріалом, з якого виконана пориста капілярна матриця, і який є гідрофобним відносно зазначеної рідини. Зокрема, в даних структурах використовується той факт, що поверхня змочування, тобто поверхня розділу між рідиною і твердим тілом, збільшується при проникненні рідини в пори матриці, і зменшується при витісненні з пор даної матриці, таким чином, що відбувається накопичення енергії при проникненні рідини в пори матриці, і виділення енергії при витісненні рідини з пор. У структурах такого типу проникнення рідини в пори матриці відбувається при практично 1 UA 111636 C2 5 10 15 20 25 30 35 40 45 50 55 60 постійному тиску, за умови, що тиск, прикладений до камери, що деформується, перевищує поріг тиску, відповідний першому рівню тиску; витіснення рідини з пор матриці також відбувається при практично постійному тиску, за умови, що тиск, прикладений до камери, що деформується, стає нижчим, ніж другий рівень тиску, як буде докладніше показано нижче. Величини обох вищезазначених рівнів тиску, відповідного (у зазначеному порядку) початку проникнення рідини в пори пористої капілярної матриці і витісненню рідини з пор цієї матриці, визначаються вибором матеріалу для виготовлення пористої капілярної матриці, а також формою його пор. Слід зазначити, що величина першого рівня тиску практично дорівнює капілярному тиску, визначуваному за рівнянням Лапласа: P=(2σ.Cos θ)/r, де σ поверхневе натягнення рідини при даній температурі, θ – (краєвий) кут змочування, і r – радіус капілярного каналу, що утворюється порою пористої капілярної матриці. При великій різниці між двома вищезгаданими тисками така поглинаюча/розсіююча енергію структура може мати особливо значний гістерезис. Як матеріал для виготовлення пористої капілярної матриці, наприклад, можна використовувати силікати, наприклад, цеоліти. Таким матеріалом також може бути гель кремнієвої кислоти, іноді званий силікагелем. Як відповідну рідину можна застосовувати воду або сплав на основі галію, индия і олова під назвою "Галінстан". Інші матеріали і відповідні рідини також приводяться як приклад у вищезазначеному патентному документі WO 96/18040. Як правило, матеріал пористої капілярної матриці може бути за своєю природою гідрофобним по відношенню до відповідної рідини, або ж на дану матрицю можна наносити покриття з метою зробити її гідрофобною. Крім того, капілярна матриця виготовляється переважно з гідрофобних зерен або мікросфер, що мають мікрометричний діаметр і нанометричні пори. Капілярна матриця також може мати форму порошку із зерен або гелю з мікросфер. Пориста капілярна матриця спільно з відповідною рідиною утворює колоїд, званий також "гідрофобною гетерогенною системою", яка і утворює поглинаючу/розсіюючу енергію структуру. Колоїд може знаходитися безпосередньо в камері, що деформується. Крім того, колоїд також може міститися в одній або декількох кишенях, виконаних в камері, що деформується, переважно, занурених в рідину, таку, як масло, яким заповнена ця камера, що деформується. У загальних рисах, поглинаюча/розсіююча енергію структура забезпечує обмеження рівня напружень, передаваних на оправу приводу першим елементом через рухомий елемент. Насправді, коли таке напруження призводить до досягнення першого рівня тиску, в структурі відбувається накопичення енергії в процесі проникнення рідини в пори пористої капілярної матриці, так що напруження, що перевищує перший рівень тиску, не передається на оправу приводу. При застосуванні приводу згідно даного винаходу для регулювання реактивного сопла двигуна ракети-носія, коли першим елементом є сопло, а другим елементом є фіксований елемент двигуна ракети-носія, розміри приводу можна вибрати такими, щоб він був в змозі витримувати рівні напружень, що виникають під час польоту, і не міг витримувати перехідне напруження, що виникає при запуску і зупинці двигуна, які можуть бути набагато вищими. Таким чином, справжній винахід дозволяє не удаватися до вибору електромеханічних приводів із збільшеними розмірами з метою забезпечення можливості витримки ними рідко виникаючої високого перехідного напруження, і, отже, дозволяє застосовувати електромеханічні приводи з відносно помірними розмірами і вагою. Оправа приводу, переважно, виконана у вигляді циліндра, а рухомий елемент даного приводу переважно виконаний у вигляді стрижня. Як варіант можливі й інші форми оправи та/або рухомого елементу, за умови, що вони не виходять за рамки об'єму даного винаходу. Крім того, поглинаюча/розсіююча енергію структура може містити декілька пористих капілярних матриць, виконаних з різних матеріалів, що працюють з однією і тією ж рідиною, або з різними відповідними рідинами. Утворені таким чином різні колоїди, переважно, містяться в окремих камерах, що деформуються. Переважно, кожна поглинаюча/розсіююча енергію структура приводу розміщена усередині порожнини, через яку проходить, принаймні, частина рухомого елементу приводу, і знаходиться між стінкою даної порожнини і засобом передачі навантаження, що чинить тиск на камеру, що деформується, поглинаючої/розсіюючої енергію структури з метою передачі навантаження від першого елементу до оправи приводу. Камера, що деформується, кожної поглинаючої/розсіюючої енергію структури, переважно, закрита усередині порожнини елементом ущільнювача, в якості якого застосовується, 2 UA 111636 C2 5 10 15 20 25 30 35 40 45 50 55 60 наприклад, пробка, встановлена з можливістю ковзання і ущільнення усередині порожнини як поршень в циліндрі. Як варіант, елемент ущільнювача може бути виконаний у вигляді мембрани, що деформується. Крім того, кожна поглинаюча/розсіююча енергію структура приводу, переважно, розташована в торцевій частині зазначеної порожнини. У першому і другому варіантах здійснення даного винаходу засобу передачі навантаження встановлені на рухомому елементі приводу. Таким чином, даний засіб передачі навантаження складає одне ціле з рухомим елементом. У першому варіанті здійснення винаходу сполучний елемент рухомого елементу для з'єднання з першим елементом включає порожнистий корпус, встановлений з можливістю ковзання на рухомому елементі, а усередині даного порожнистого корпуси є вищезазначена порожнина. Таким чином, кожна поглинаюча/розсіююча енергію структура забезпечує постійне обмеження навантаження, передаваного від першого елементу на оправу приводу через рухомий елемент цього приводу, незалежно від довжини ходу даного рухомого елементу відносно оправи приводу. У даному першому варіанті здійснення засобу передачі навантаження, переважно, виконані у вигляді пластини, наприклад, циліндрової форми. Крім того, керування рухомим елементом приводу, переважно, здійснюється приводним пристроєм, вбудованим в оправу приводу. У другому варіанті здійснення даного винаходу, оправа приводу включає порожнистий корпус з виконаною усередині нього порожниною, і приводний пристрій рухомого елементу приводу, жорстко закріплений в даній порожнині. В даному випадку, кожна поглинаюча/розсіююча енергію структура приводу поміщена, таким чином, усередині порожнистого корпуса оправи. Далі, кожна поглинаюча/розсіююча енергію структура приводу, переважно, розміщена так, щоб на неї могли впливати засоби передачі навантаження, коли рухомий елемент приводу знаходиться в кінці свого ходу. У третьому варіанті здійснення даного винаходу, оправа приводу включає порожнистий корпус з виконаною усередині нього порожниною і допоміжний засіб передачі навантаження, що виконує роль опори для приводного пристрою при переміщенні рухомого елементу у вищезгадану порожнину. В даному випадку, як і у вищезгаданому першому варіанті здійснення, зусилля передається на кожну з поглинаючих/розсіюючих енергію структур приводу, які, таким чином, обмежують зусилля, передаване на оправу приводу, незалежно від величини ходу рухомого елементу приводу. У зазначених вище другому і третьому варіантах здійснення засобу передачі навантаження, переважно, включають одну або декілька пластин, що відносяться, відповідно, до кожної з поглинаючих/розсіюючих енергію структур, причому кожна з зазначених пластин розташована між приводним пристроєм і поглинаючої/розсіюючої енергію структурою. В цілому, електромеханічний привод, переважно, включає дві поглинаючі/розсіюючі енергію структури для поглинання механічної енергії, кожна з яких розташована на відповідному шляху передачі навантаження між першим елементом і оправою приводу і містить камеру, що деформується, яка вміщає, принаймні, одну пористу капілярну матрицю з відкритими порами і відповідну рідину з кутом змочування більш 90° відносно зазначеної матриці, причому рідина вибирається так, щоб, принаймні, частина цієї рідини могла проникати в пори матриці, коли камера піддається дії зовнішнього механічного тиску, що дорівнює або перевищує перший рівень тиску, і самостійно виходити з пор матриці по капілярах, коли на камеру діє зовні механічний тиск, величина якого менша другого рівня тиску, причому другий рівень тиску менший першого рівня тиску; при цьому кожна поглинаюча/розсіююча енергію структура розміщена з кожного боку засобів передачі навантаження, таким чином, що перший елемент може зміщувати дані структури в двох протилежних напрямах. Предметом даного винаходу також є двигун ракети-носія, що містить, принаймні, одне реактивне сопло, а також, принаймні, один електромеханічний привод описаного вище типу, слугуючий для керування даним соплом та його утримання. Як відомо, кількість приводів, необхідних для керування вищезазначеним реактивним соплом, дорівнює двом. Двох приводів, дійсно, може бути досить для керування таким соплом. Предметом даного винаходу також є ступінь ракети-носія, що містить, принаймні, один двигун зазначеного вище типу. 3 UA 111636 C2 5 10 15 20 25 30 35 40 45 50 55 60 Крім того, предметом даного винаходу також є ракета, що містить, принаймні, одна ступінь зазначеного вище типу. Короткий опис креслень Справжній винахід стане зрозумілішим після ознайомлення з приведеним нижче описом (що приводиться як необмежуючий приклад) і прикладеними кресленнями. На Фіг. 1 показаний схемний вигляд в розрізі по осі електромеханічного приводу згідно першому варіанту здійснення винаходу; на Фіг. 2 – схемний частковий вигляд в розрізі по осі електромеханічного приводу за альтернативним варіантом виконання; на Фіг. 3 – схемний вигляд в розрізі по осі електромеханічного приводу згідно другого варіанта здійснення винаходу; на Фіг. 4 – схемний вигляд в розрізі по осі електромеханічного приводу згідно третього варіанта здійснення винаходу. На всіх кресленнях однаковими номерами позицій позначені ідентичні або аналогічні елементи. Здійснення винаходу На Фіг. 1 представлений електромеханічний привод 10, що містить оправу 12, рухомий елемент 14, як правило, у формі стрижня, здатний прямолінійно переміщатися відносно оправи 12 уздовж подовжньої осі 15 приводу, і приводний пристрій 16, встановлений усередині оправи 12 і вбудований в неї, що служить для переміщення рухомого елементу 14. Приводний пристрій 16 є пристроєм звичайного типу, що містить, наприклад, засіб, що взаємодіє з різьбовою частиною 18 рухомого елементу 14 так, щоб утворювати кулькогвинтову передачу для регулювання положення рухомого елементу 14. Рухомий елемент 14 забезпечений сполучним елементом 20, прикріплюваним до першого елементу, на який впливає привод 10 при регулюванні сопла відносно другого елементу, причому зазначені перший і другий елементи на кресленні не показані. Оправа 12 містить кріпильний пристрій 22 для кріплення даної оправи 12 до другого елементу. У першому варіанті здійснення даного винаходу, показаному на Фіг. 1, переміщуваний рухомим елементом 14 сполучний елемент 20 містить порожнистий корпус 24 подовженої форми, встановлений паралельно подовжній осі 15 приводу 10 і утворюючий порожнину 26, а також дві поглинаючих/розсіюючих енергію структури 28 і 30, що контактують, відповідно, з двома протилежно розташованими торцями 32 і 34 порожнини 26 і слугують для обмеження передаваного подовжнього зусилля на рухомий елемент 14, як буде докладніше показано нижче. Рухомий елемент 14 містить кінцеву головку 36, виконану у вигляді пластини, встановленої з можливістю ковзання усередині порожнини 26 і що знаходиться між обома вищезазначеними поглинаючими/розсіюючими енергію структурами 28 і 30. Дана кінцева головка 36 утворює засіб передачі навантаження, як буде показано нижче. Рухомий елемент 14 проходить крізь одну 28 з поглинаючих/розсіюючих енергію структур, розташовану з боку оправи 12 приводу, а також крізь отвір 38 відповідної форми у відповідному торці 32 порожнини 26. Кожна з поглинаючих/розсіюючих енергію структур 28 і 30 містить порошок, який є сумішшю зерен 40, що мають пористу структуру з відкритими порами, а також відповідну рідину 42, відносно якої зерна 40 є гідрофобними, в тому сенсі, що кут змочування рідини 42 відносно даних зерен 40 більший 90°. Згідно термінології, використовуваній в справжньому винаході, порошок що складається із зерен 40, є пористою капілярною матрицею. Даний порошок і рідина 42 утворюють колоїд. Колоїд кожної поглинаючої/розсіюючої енергію структури 28, 30 поміщений в камері, що деформується, даної структури, яка знаходиться усередині порожнини 26 порожнистого корпусу 24 і обмежена стінками порожнистого корпусу 24 і елементом ущільнювача 44, 46 в даному порожнистому корпусі 24, розташованим між зазначеною структурою 28, 30 і кінцевою головкою 36 рухомого елементу 14. Елемент ущільнювача 44 поглинаючої/розсіюючої енергію структури 28, встановлений з боку рухомого елементу 14, має, принаймні, один отвір 48, крізь який герметичним чином проходить рухомий елемент 14. Загалом, рідина 42 для кожної з поглинаючих/розсіюючих енергію структур 28 і 30 вибирають так, щоб, принаймні, частина даної рідини проникала в пори зерен 40, коли головка 36 рухомого елементу 14 здійснює на камеру, що деформується, даної поглинаючої/розсіюючої енергію структури механічний тиск, що дорівнює або більший першого рівня тиску P1, і самостійно виходила з пор зерен 40 під дією капілярності, коли головка 36 рухомого елементу 14 здійснює на камеру, що деформується, поглинаючої/розсіюючої енергію структури 4 UA 111636 C2 5 10 15 20 25 30 35 40 45 50 55 60 механічний тиск нижчий другого рівня тиск P2, який нижчий за перший рівень тиску P1. З цією метою, зерна 40 можуть бути виконані з натурального або синтетичного гідрофобного матеріалу, наприклад, сімейства цеолітів, а як відповідну рідину 42 при цьому можна використовувати воду. Слід зазначити, що, як вже зазначалося вище, перший рівень тиску P1 практично дорівнює капілярному тиску, визначуваному формулою Лапласа. У способі здійснення, показаному на Фіг. 1, кожен елемент ущільнювача 44, 46 має форму простої пробки, встановленої з можливістю ковзання в порожнині 26 порожнистого корпуси 24, як поршень в циліндрі, щоб головка 36 рухомого елементу 14 могла переміщати його уздовж подовжньої осі, щоб, таким чином, він міг стискувати суміш кульок 40 і відповідної рідини 42. В даному випадку, кожен елемент ущільнювача 44, 46 утворює ковзаюче з'єднання ущільнювача. Як варіант, в рамках об'єму даного винаходу можливі й інші форми елементу ущільнювача, для з'єднання камер, що деформуються, одна з одною кожної поглинаючої/розсіюючої енергію структури 28, 30. Кожен елемент ущільнювача, наприклад, може бути виконаний у вигляді сільфону 49, як це показано на Фіг. 2, відкритий кінець 50 якого жорстко прикріплений до відповідного торця 32, 34 порожнини 26, а стінка 52, що закриває протилежний кінець, може бути плоскою і може розташовуватися паралельно торцю 32, 34. У такому разі тиск, що надається головкою 36 на закриваючу стінку 52 сільфона 49 прагне стискувати даний сільфон 49, і, отже, обмежену даними елементами камеру, що деформується, і суміш зерен 40 і відповідної рідини 42, яка знаходиться в ній. При роботі поглинаючі/розсіюючі енергію структури 28 і 30 сполучного елементу 20 забезпечують обмеження подовжніх навантажень, передаваних даним сполучним елементом 20 на оправу 12 приводу 10, при тиску, практично рівному першому рівню тиску P1. Дійсно, коли тиск, що надається головкою 36 рухомого елементу 14 на елемент ущільнювача 44, 46 одній з поглинаючих/розсіюючих енергію структур 28, 30, нижчий за перший рівень тиску P1, дана поглинаюча/розсіююча енергію структура веде себе практично як нестискувана структура. І навпаки, як тільки вищезазначений тиск досягає першого рівня P1, рідина 42 починає проникати в пори зерен 40, що призводить до накопичення енергії в даній поглинаючій/розсіюючій енергію структурі. На цьому етапі, тиск, що надається головкою 36 рухомого елементу 14 на елемент ущільнювача 44, 46, залишається практично постійним. Коли тиск стає нижчим другого рівня P2, який нижчий за перший рівень тиску P1, рідина 42 починає самостійно виходити з пор зерен 40 під дією капілярних сил, так що, принаймні, частина енергії, накопиченої раніше в поглинаючій/розсіюючій енергію структурі, знову передається на рухомий елемент 14, але при тиску нижчому першого рівня P1. І, нарешті, подовжні навантаження, передавані сполучним елементом 20 на рухомий елемент 14, таким чином, обмежуються першим рівнем тиску P1. На Фіг. 3 представлений схемний вигляд в розрізі по осі електромеханічного приводу 10 згідно другому варіанту здійснення винаходу. Даний привод відрізняється від приводу, показаного на Фіг. 1, тим, що порожнина 26 не обмежена порожнистим корпусом, окремим від оправи 12 і частини сполучного елементу 20. Дійсно, ця порожнина 26 знаходиться усередині порожнистого корпуси 54, що є частиною оправи 12 приводу, а приводний пристрій 16 рухомого елементу 14 жорстко закріплено усередині даної порожнини 26. У даному другому варіанті здійснення, на рухомому елементі 14 встановлено дві пластини 36a і 36b, які розташовані з обох боків приводного пристрою 16 і кожна з яких звернена до відповідної поглинаючої/розсіюючої енергію структури 28, 30; причому ці дві пластини 36a і 36b утворюють засіб передачі навантаження, аналогічно тому, як це робить пластина 36 на Фіг. 1. Таким чином, при дії на рухомий елемент 14 навантажень, витікаючих від першого елементу, до якого прикріплений даний рухомий елемент 14, він може зміститися і досягти кінцевого положення свого ходу, якщо ці зусилля є достатньо високими, так що одна з пластин 36a і 36b може вступити в контакт з відповідною поглинаючою/розсіюючою енергію структурою 28, 30. Таким чином, рівень вищезазначених зусиль обмежується величиною, практично рівною величині зусилля при першому рівні тиску P1, аналогічно тому, як це було описано вище, за винятком того, що рухомий елемент 14 повинен переміститися в кінцеве положення свого ходу, перш ніж поглинаючі/розсіюючі енергію структури вступлять в дію. Іншими словами, якщо зусилля, що докладаються на рухомий елемент 14 першим елементом, не примушують даний рухомий елемент 14 переміститися в кінцеве положення свого ходу при заданій потужності і 5 UA 111636 C2 5 10 15 20 25 30 35 40 45 50 55 60 прийомистості приводного пристрою 16, то поглинаючі/розсіюючі енергію структури 28 і 30 не вступлять в дію. Тому ці структури в даному випадку використовуються як механічні обмежувачі ходу. На Фіг. 4 показаний електромеханічний привод 10 згідно третьому варіанту здійснення даного винаходу, в якому приводний пристрій 16 не закріплений відносно оправи 12, але утримується усередині порожнини 26 корпусів 54 оправи за допомогою обох поглинаючих/розсіюючих енергію структур 28 і 30. Точніше кажучи, привод 10 включає дві опорні конструкції 56 і 58, встановлені уподовж осі з обох боків приводного пристрою 16, кожна з яких сполучена з даним приводним пристроєм 16 і з відповідною пластиною 60, 62, встановленою з можливістю ковзання в порожнині 26 порожнистого корпусу 54 оправи 12 і яка упирається в елемент ущільнювача 44, 46, зв'язуючи між собою камери, що деформуються, відповідних поглинаючих/розсіюючих енергію структур 28, 30. Таким чином, приводний пристрій 16 утримується в своєму положенні в подовжньому напрямі обома поглинаючими/розсіюючими енергію структурами 28, 30 і опорними конструкціями 56 і 58. Слід зазначити, що пластини 60 і 62 утворюють засіб передачі навантаження, практично аналогічний пластинам 36, 36a, 36b на Фіг. 1 і 3. При дії осьових навантажень уздовж осі 15 приводу від першого елементу на рухомий елемент 14 і далі на приводний пристрій 16, даний приводний пристрій може передавати ці навантаження через відповідну пластину 60 або 62 на відповідну поглинаючу/розсіюючу енергію структуру 28 або 30, яка працює як обмежувач навантажень, аналогічно тому, як це було описано вище. Також слід зазначити, що елементи ущільнювачів 44, 46 кожній поглинаючої/розсіюючої енергію структури 28, 30 приводу 10 в описаних вище другому і третьому варіантах здійснення винаходу можуть мати різні форми, наприклад, як показано на Фіг. 2. У всіх трьох вищеописаних варіантах здійснення винаходу поглинаючі/розсіюючі енергію структури 28, 30 встановлені на шляху передачі зусиль від першого елементу, сполученого з рухомим елементом 14, до оправи 12 приводу, щоб засіб передачі навантаження 36, 36a, 36b, 60, 62 міг переміщати їх уздовж подовжньої осі в двох протилежних напрямках, позначених стрілками 64 і 66 (Фіг. 1, 3 і 4). Загалом, привод 10 згідно справжньому винаходу забезпечує значне зниження ваги і зменшення габаритів, при цьому залишаючись здатним витримувати порівняно високі навантаження завдяки ефекту обмеження навантажень, що створюється поглинаючими/розсіюючими енергію структурами, що є невід'ємними елементами такого приводу. Привод 10 згідно першому варіанту здійснення винаходу, описаний вище з посиланням на Фіг. 1, може мати особливо зменшені габарити, оскільки поглинаючі/розсіюючі енергію структури даного приводу розміщені не в його оправі 12, а в сполучному елементі 20, встановленому на рухомому елементі 14 і не сполученому з оправою 12. Враховуючи, що поглинаючі/розсіюючі енергію структури приводу 10 постійно знаходяться на лінії передачі зусиль, незалежно від ходу рухомого елементу 14, напруження, що виникають в приводному пристрої 16 в результаті дії з боку рухомого елементу 14, можуть бути оптимально мінімізовані. Проте це робить бажаним, щоб динамічні характеристики поглинаючих/розсіюючих енергію структур були визначені з максимально можливою точністю, тому що дані структури змінюють загальні динамічні характеристики приводу. Проте, ці структури не впливатимуть на роботу і керування приводу в штатному режимі, тобто за відсутності високих перехідних напружень. Загалом, розміри приводу 10 згідно справжньому винаходу переважно вибираються так, щоб рівень зусиль, що прикладаються до нього в штатному режимі, зокрема, у фазі польоту, не перевищували рівень тиску інтрузії P1. За таких умов динамічні характеристики колоїду кожної поглинаючої/розсіюючої енергію структури аналогічні динамічним характеристикам рідини, що входить в його склад, яка, переважно, є майже нестискуваною. В цьому випадку, поглинаючі/розсіюючі енергію структури, не дивлячись на те, що вони послідовно включені в ланцюг передачі зусиль приводу, проте, не змінюють динамічні характеристики керування даного приводу в штатному режимі. Привод 10 згідно другому варіанту здійснення даного винаходу володіє перевагою, яка полягає в тому, що поглинаючі/розсіюючі енергію структури починають працювати тільки тоді, коли рухомий елемент 14 досягає кінця свого ходу, і, таким чином, тиск даних структур не впливає на динамічні характеристики приводу в штатному режимі. 6 UA 111636 C2 Це може бути вигідним, зокрема, якщо поглинаючі/розсіюючі енергію структури містять стискувану рідину, наприклад, масло. Крім того, точне знання динамічних характеристик поглинаючих/розсіюючих енергію структур в даному випадку має другорядне значення. 5 ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 55 60 1. Електромеханічний привод (10), призначений для переміщення першого елемента відносно другого елемента і який містить рухомий елемент (14), забезпечений сполучним елементом (20) для кріплення до першого елемента, та оправу (12), забезпечену кріпильним пристроєм (22) для кріплення до другого елемента, при цьому рухомий елемент (14) має можливість поступального переміщення відносно оправи, який відрізняється тим, що він додатково містить принаймні одну поглинаючу/розсіюючу механічну енергію структуру (28, 30), розташовану на шляху передачі зусиль між першим елементом і оправою (12) приводу (10) і яка містить камеру, що деформується, яка вміщає принаймні одну пористу капілярну матрицю (40) з відкритими порами і відповідну рідину (42), кут змочування якої більший 90° відносно матриці (40) і яка вибрана таким чином, що принаймні частина зазначеної рідини (42) має можливість проникнення в пори матриці (40), коли на камеру діє зовнішній механічний тиск, що дорівнює або вищий за перший рівень тиску Р1, і самостійного виходу з пор матриці (40) під дією капілярних сил, коли на камеру діє зовнішній механічний тиск, нижчий, ніж другий рівень тиску Р2, який нижчий за перший рівень тиску Р1. 2. Привод за п. 1, який відрізняється тим, що одна або кожна поглинаюча/розсіююча енергію структура (28, 30) приводу (10) розташована усередині порожнини (26), через яку проходить принаймні частина рухомого елемента (14) приводу (10), і знаходиться між стінкою (32, 34) порожнини (26) і засобами (36, 36а, 36b, 60, 62) передачі навантаження, що чинять тиск на камеру, що деформується, поглинаючої/розсіюючої енергію структури (28, 30) для передачі зусиль від першого елемента до оправи (12) приводу (10). 3. Привод за п. 2, який відрізняється тим, що засоби (36, 36a, 36b) передачі навантаження встановлені на рухомому елементі (14). 4. Привод за п. 3, який відрізняється тим, що сполучний елемент (20) рухомого елемента (14), призначений для з'єднання з першим елементом, містить порожнистий корпус (24), який встановлений з можливістю ковзання на рухомому елементі (14) і усередині якого знаходиться порожнина (26). 5. Привод за п. 3, який відрізняється тим, що оправа (12) містить порожнистий корпус (54), усередині якого знаходиться порожнина (26), при цьому усередині даної порожнини (26) жорстко закріплений приводний пристрій (16) для приводу рухомого елемента (14). 6. Привод за п. 2, який відрізняється тим, що оправа (12) містить порожнистий корпус (54), усередині якого знаходиться порожнина (26), при цьому засоби (60, 62) передачі навантаження служать опорою для приводного пристрою (16), призначеного для переміщення рухомого елемента (14) усередині зазначеної порожнини (26). 7. Привод за п. 5, який відрізняється тим, що засіб передачі навантаження містить одну або декілька пластин (36а, 36b, 60, 62), що мають можливість взаємодії, відповідно, з однією з або кожною з поглинаючих/розсіюючих енергію структур (28, 30), при цьому кожна з зазначених пластин встановлена між приводним пристроєм (16) і відповідною поглинаючою/розсіюючою енергію структурою (28, 30). 8. Привод за п. 2, який відрізняється тим, що принаймні одна з поглинаючих/розсіюючих механічну енергію структур містить дві поглинаючі/розсіюючі енергію структури (28, 30), кожна з яких розташована на відповідному шляху передачі зусиль між першим елементом і оправою (12) приводу (10) та містить камеру, що деформується, яка вміщає принаймні одну пористу капілярну матрицю (40) з відкритими порами і відповідну рідину (42), яка має кут змочування, більший 90° відносно зазначеної матриці (40), і яка вибирається так, щоб принаймні частина рідини (42) мала можливість проникнення в пори матриці (40), коли матриця піддається дії зовнішнього механічного тиску, вищого за перший рівень тиску Р1, і самостійного виходу з пор матриці (40) під дією капілярних сил, коли на матрицю діє зовнішній механічний тиск, нижчий другого рівня тиск Р2, причому другий рівень тиску Р2 менший першого рівня тиску Р1; при цьому поглинаючі/розсіюючі енергію структури (28, 30) розташовані з обох боків від засобу (36, 36а, 36b, 60, 62) передачі навантаження таким чином, що перший елемент має можливість зсуву поглинаючих/розсіюючих енергію структур (28, 30) в двох взаємно протилежних напрямках (64, 66). 7 UA 111636 C2 5 9. Двигун ракети-носія, що містить принаймні одне реактивне сопло, який відрізняється тим, що він містить принаймні один електромеханічний привод (10) за п. 1, призначений для керування реактивним соплом і його утримання. 10. Ступінь ракети-носія, що містить принаймні один двигун за п. 9. 11. Ракета, що містить принаймні один ступінь за п. 10. 8 UA 111636 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори англійськоюAbensur, Thierry, Pignie, Gerald, Vergnol, Alizee, Perez-Diago, Susana
Автори російськоюАбенсюр Тьери, Пиньи Жеральд, Вернёль Ализэ, Перес-Дъяго Сусана
МПК / Мітки
МПК: F16F 9/00, F16F 15/02, B64G 1/40, F16F 9/30
Мітки: обмеження, навантаження, електроциліндр, ракета, засобом, таким, керованим, соплом, електроциліндром
Код посилання
<a href="https://ua.patents.su/11-111636-elektrocilindr-iz-zasobom-obmezhennya-navantazhennya-ta-raketa-z-soplom-kerovanim-takim-elektrocilindrom.html" target="_blank" rel="follow" title="База патентів України">Електроциліндр із засобом обмеження навантаження та ракета з соплом, керованим таким електроциліндром</a>
Закривний засіб, що вказує на цілісність упаковки (варіанти), та упаковка з таким закривним засобом
Номер патенту: 96274
Опубліковано: 25.10.2011
Автори: Вебер Джеффрі Томас, Коул Керол А.
МПК: B65D 75/58, B65D 77/20
Мітки: упаковка, засобом, засіб, закривним, варіанти, вказує, цілісність, упаковки, таким, закривний
Формула / Реферат:
1. Засіб, що вказує на цілісність упаковки, який містить:пристрій, пов'язаний із закривним засобом, що повторно герметизується, і відповідним контейнером, що має плівкову обгортку, причому вказаний пристрій виробляє чутний звук при відкриванні закривного засобу, що повторно герметизується, в перший раз,при цьому пристрій містить щонайменше одну смугу, спочатку прикріплену до закривного засобу, що повторно герметизується, і...
З`єднуючий блок, з’єднуючий блок в комбінації з встановленим в ньому детонатором та спосіб установки детонатора з першим засобом затиснення в з’єднуючий блок з замковим елементом з другим засобом затиснення
Номер патенту: 59346
Опубліковано: 15.09.2003
Автори: Фріц Джеймз Е., Цека Томас С., Сутула Даніел П., молодший
Мітки: установки, встановленим, детонатора, затиснення, детонатором, спосіб, блок, засобом, замковим, елементом, другим, комбінації, ньому, з'єднуючий, першим
Формула / Реферат:
1. З'єднуючий блок для утримання принаймні однієї лінії для передачі сигналів, що знаходиться в контакті для передачі сигналів з детонатором, який має вихідний кінець, причому з'єднуючий блок має: корпус з кінцем для передачі сигналів, замковим кінцем i повздовжнім, утвореним в корпусі каналом, що має усередині задане місце для розташування вихідного кінця детонатора, розміри i конфігурація каналу придатні для введення в нього...
Пристрій для обмеження ударних струмів і моментів при підключенні машин змінного струму до мережі й обмеження перенапруг при їхньому відключенні
Номер патенту: 60068
Опубліковано: 15.09.2003
Автори: Сосков Анатолій Гєоргійович, Фінкельштейн Володимир Борисович, Дорохов Олександр Володимирович
МПК: H02P 1/16
Мітки: підключенні, відключенні, змінного, машин, струму, пристрій, обмеження, моментів, ударних, мережі, їхньому, перенапруг, струмів
Формула / Реферат:
Пристрій для обмеження ударних струмів і моментів при підключенні машин змінного струму до мережі й обмеження перенапруг при їхньому відключенні, що містить погоджуючий трифазний трансформатор, два малопотужних тиристори, два погоджуючих трансформатори, розділові діоди, обмежувальні опори в колі керування і два силових симістори, який відрізняється тим, що як погоджуючі трансформатори застосовані піктрансформатори, включені на керуючі...
З’єднання між задньою стінкою камери згоряння і соплом ракетного двигуна
Номер патенту: 81643
Опубліковано: 25.01.2008
Автор: Рену Жиль
МПК: F02K 9/08, F16J 15/06, F02K 09/34, F16J 15/08
Мітки: соплом, задньою, камери, ракетного, двигуна, з'єднання, згоряння, стінкою
Формула / Реферат:
1. З'єднання між задньою стінкою (14) камери згоряння і соплом (20) ракетного двигуна, що містить засоби механічного з'єднання, які з'єднують сопло із задньою стінкою щонайменше в осьовому напрямку, а також тепловий бар'єр (40) і щонайменше одну ущільнювальну прокладку (32, 34), що розташовані в зоні (30) сполучення, яка обмежена суміжними поверхнями задньої стінки і сопла, які розташовані одна навпроти одної, яке відрізняється тим, що...
Спосіб передачі електричної енергії від джерела в навантаження
Номер патенту: 7414
Опубліковано: 15.06.2005
Автори: Папіна Інга Станіславовна, Чашко Марк Васильович, Гусаров Андрій Олексійович
МПК: H02K 3/00
Мітки: передачі, електричної, спосіб, енергії, навантаження, джерела
Формула / Реферат:
Спосіб передачі електричної енергії від джерела в навантаження, що включає періодичну передачу енергії з джерела в індуктивність по електричному проводу, що має опір, накопичення енергії в магнітному полі індуктивності і передачу енергії з індуктивності в навантаження, який відрізняється тим, що накопичення енергії в магнітному полі індуктивності здійснюють у кожному періоді передачі протягом часу, не більшого половини частки від розподілу...
Попередній патент: Ступеневий перемикач із вакуумними перемикальними елементами
Наступний патент: Склад морозива молочно-пшеничного з ксилітом
Випадковий патент: Спосіб вирощування інтенсивних насаджень сливи на вегетативно розмножуваних підщепах