Судновий плавниковий рушій
Номер патенту: 115696
Опубліковано: 11.12.2017
Автори: Литовченко Юлія Миколаївна, Литовченко Геннадій Володимирович, Панченко Микола Сергійович
Формула / Реферат
1. Судновий плавниковий рушій, який містить механізм приводу з горизонтально встановленою на ньому штангою, на вільному кінці якої шарнірно прикріплений вертикальний плавник, причому механізм приводу надає згаданій штанзі коливального руху у горизонтальній площині, який відрізняється тим, що згадана штанга виконана змінної довжини з гідравлічним механізмом для її зміни та містить пружний елемент, що охоплює вільний кінець штанги та жорстко прикріплений з одного боку до його торця, а з іншого - до рухомої разом з плавником вздовж повздовжньої осі штанги верхньої частини шарніра плавника, причому до складу механізму приводу введений механізм синхронізації поперечних і повздовжніх коливань згаданої штанги.
2. Рушій за п. 1, який відрізняється тим, що згадана штанга виконана трубчастою та телескопічно розсувною, а гідравлічний механізм для зміни її довжини утворений її телескопічними частинами, одна з яких є гідроциліндром, а інша - розташованим у ньому поршнем, шток якого є згаданим вільним кінцем штанги.
3. Рушій за п. 2, який відрізняється тим, що згадана верхня частина шарніра плавника встановлена з можливістю переміщення вздовж штока поршня по напрямних, жорстко прикріплених до гідроциліндра, де згадана верхня та нерухомо приєднана до плавника нижня частини шарніра утворюють механізм зміни інсталяційних кутів плавника.
4. Рушій за будь-яким з пп. 1-3, який відрізняється тим, що згаданий пружний елемент виконаний у вигляді циліндричної пружини.
5. Рушій за будь-яким з пп. 1-4, який відрізняється тим, що згаданий механізм синхронізації містить поперечину, що жорстко прикріплена до штанги та шарнірно - до корпусу судна, де поперечина здатна взаємодіяти з перемикачами для керування зазначеним гідравлічним механізмом.
Текст
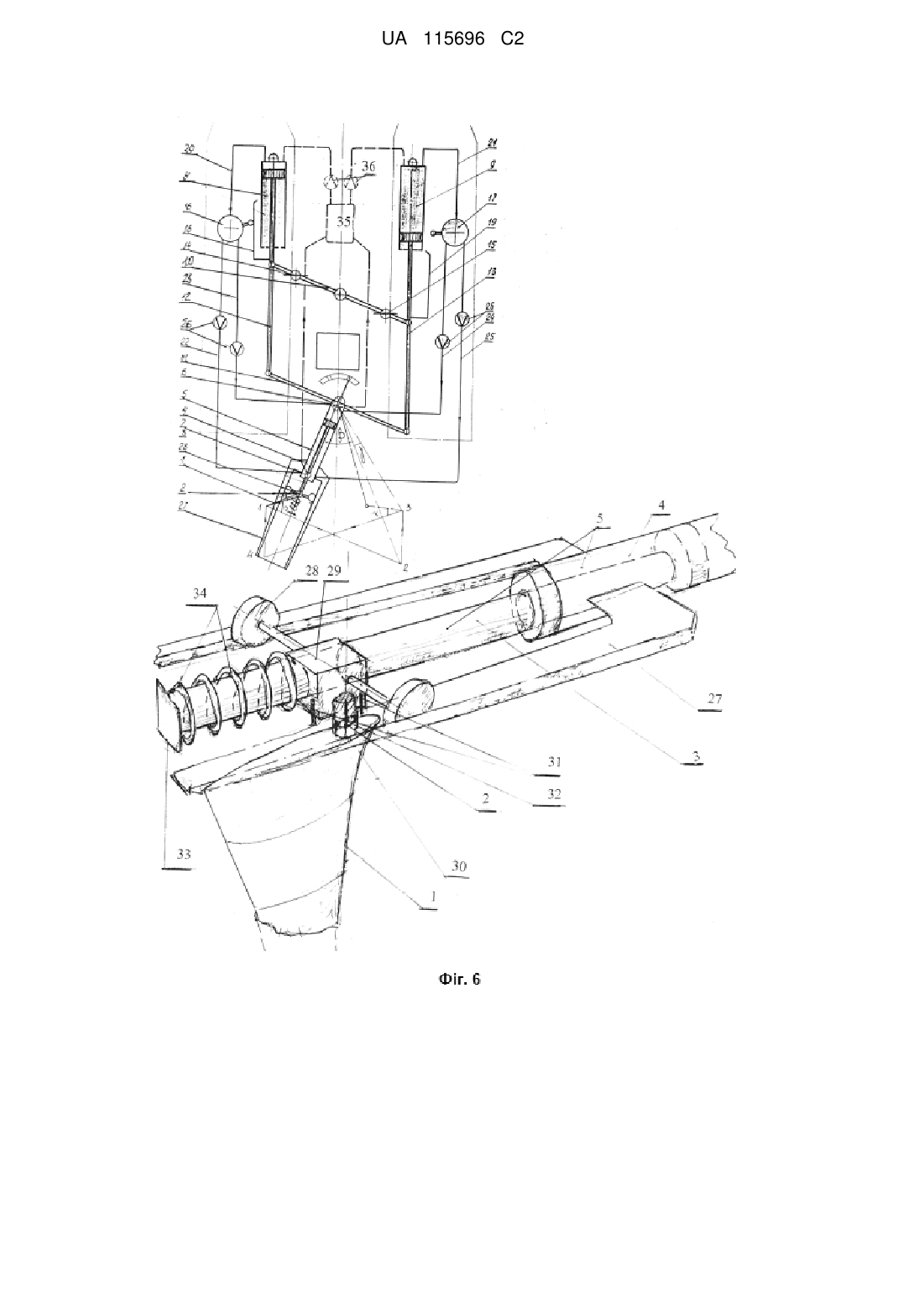
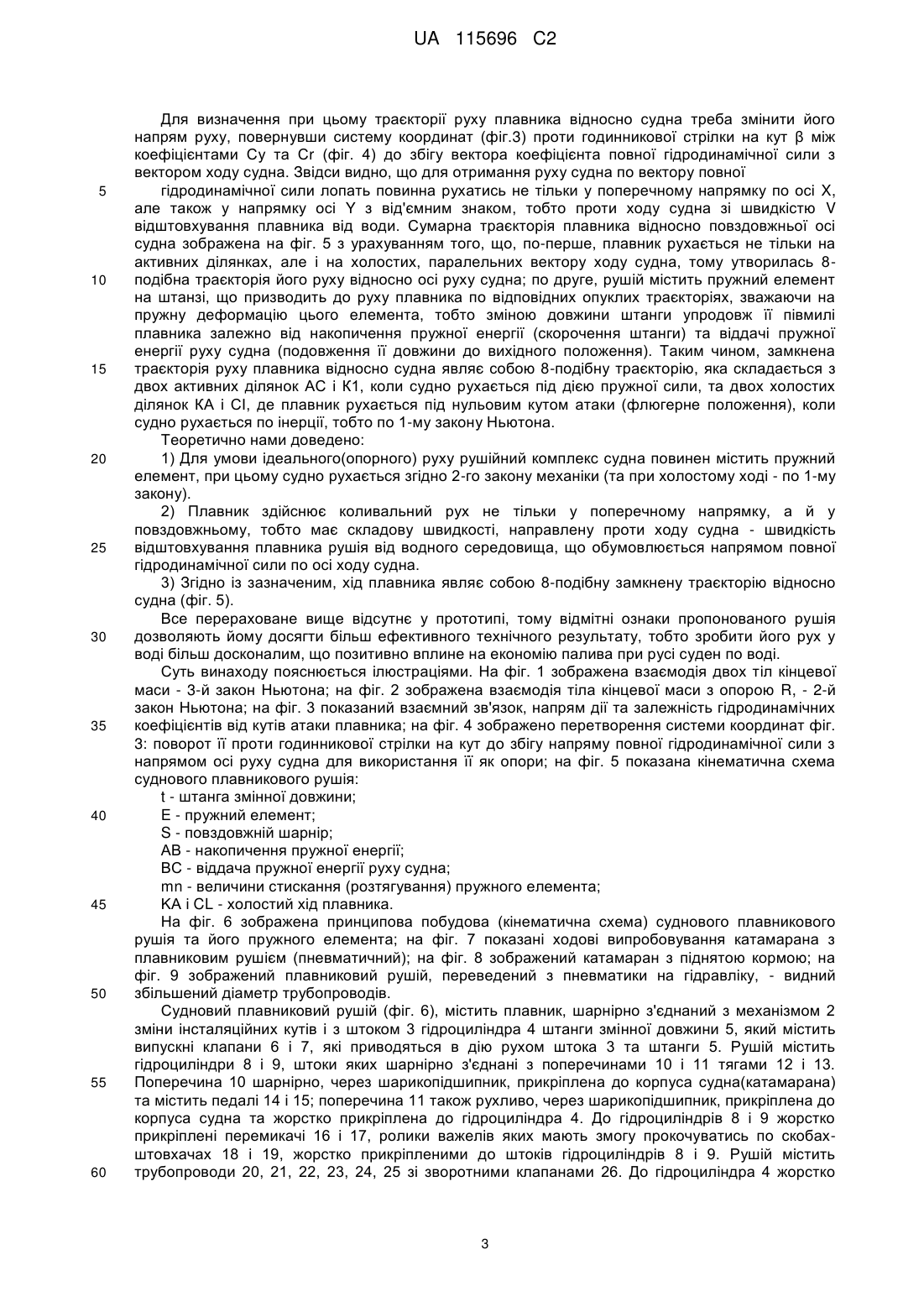
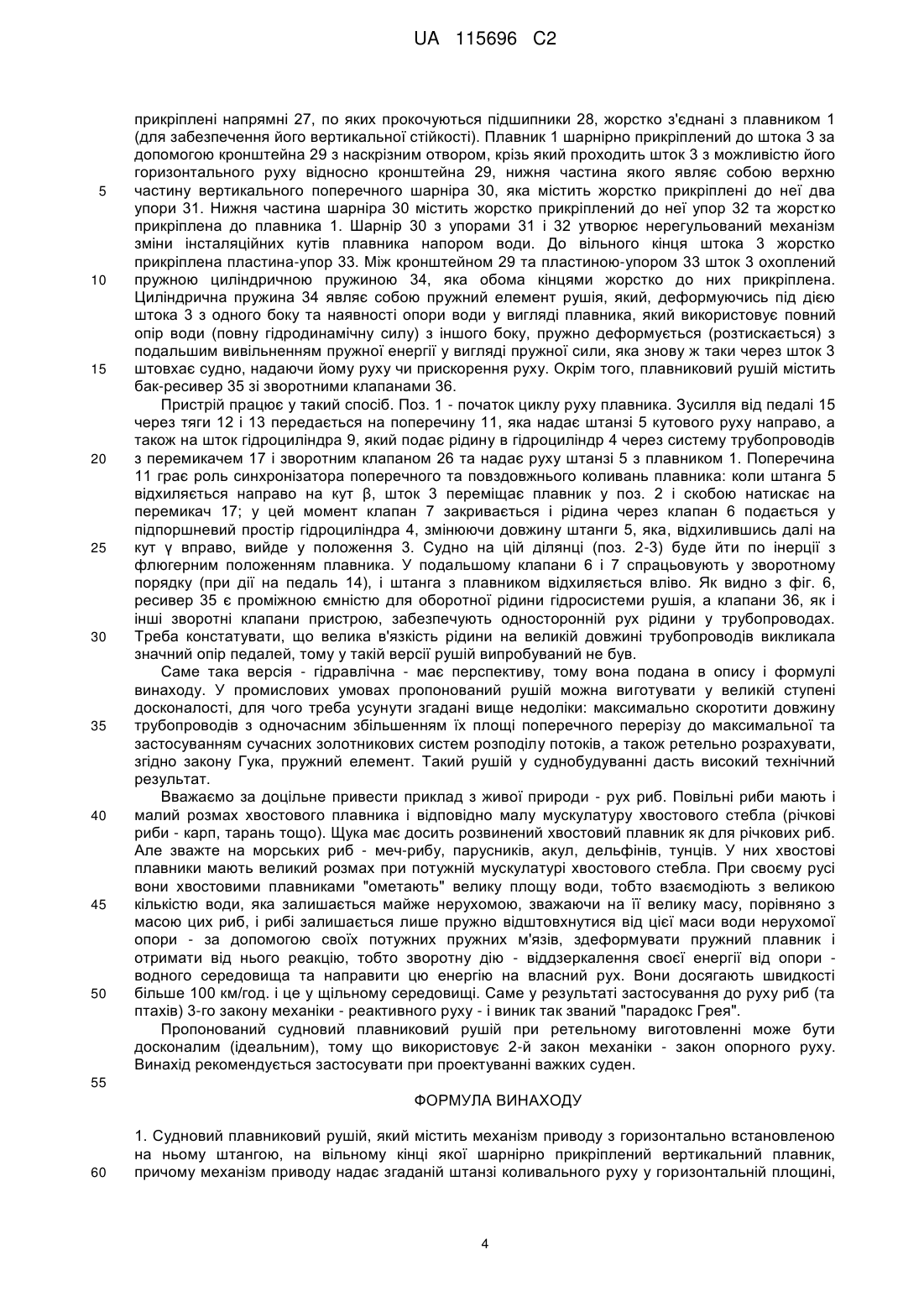
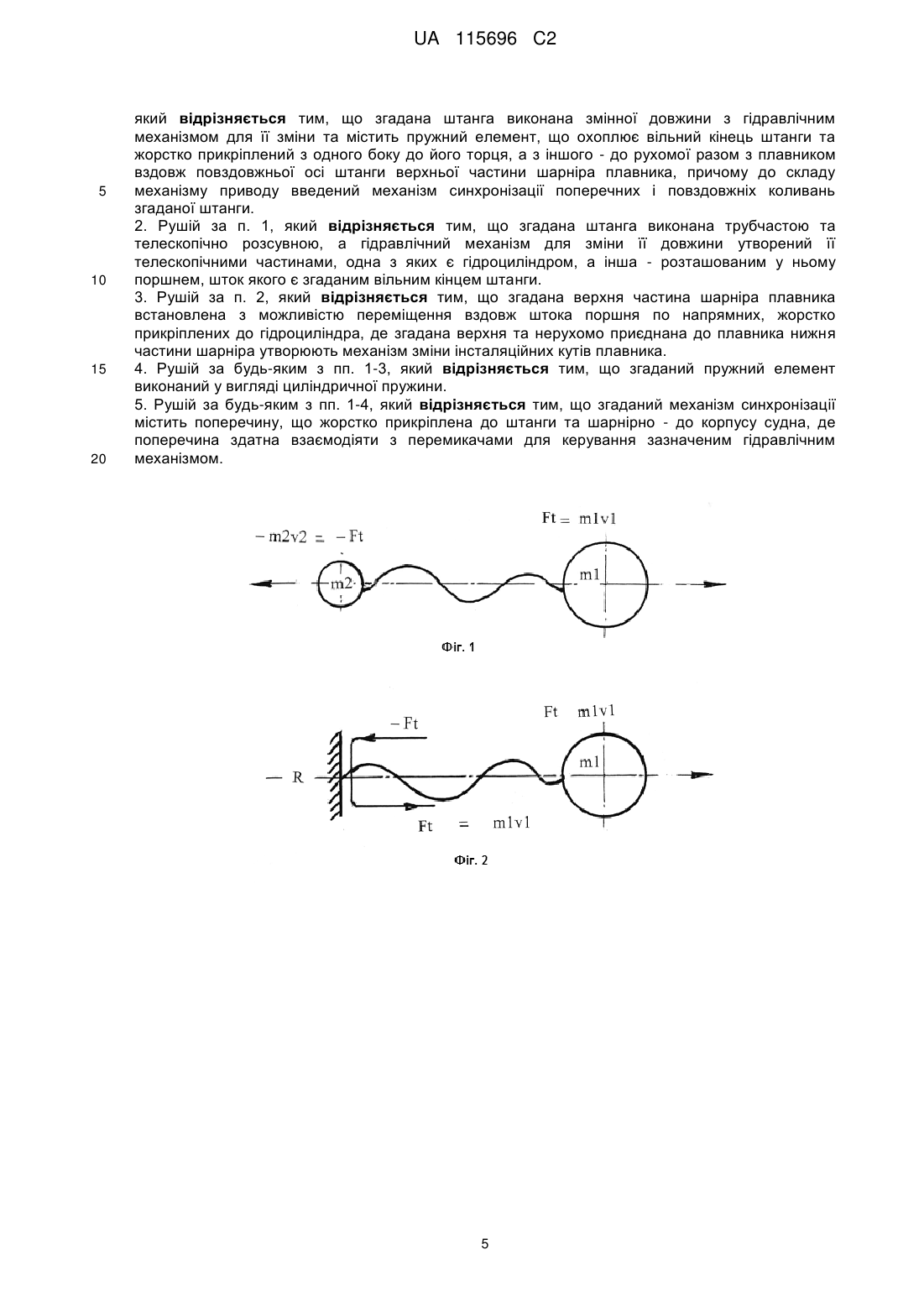
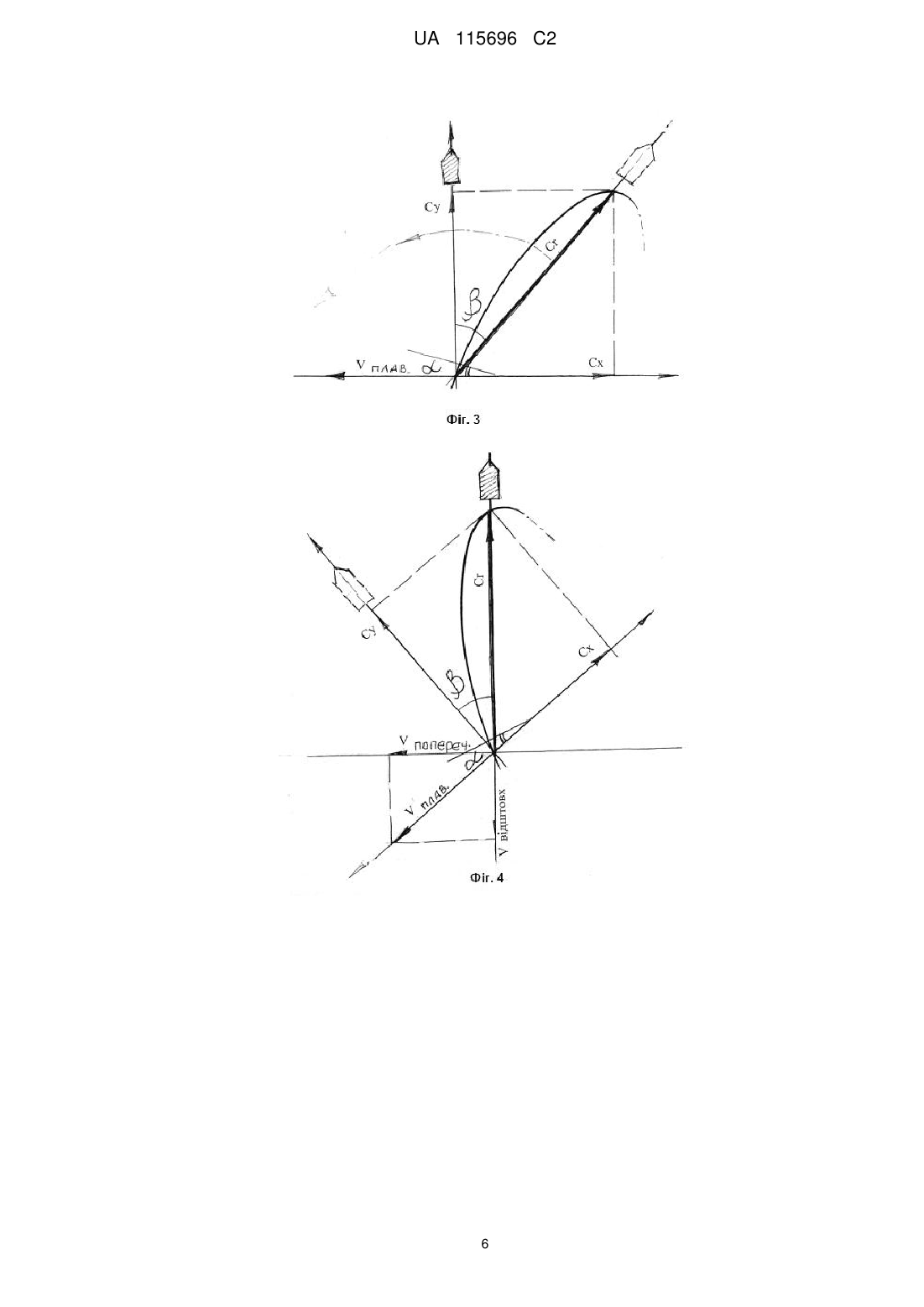
Реферат: Винахід належить до суднобудування. Судновий плавниковий рушій містить механізм приводу з горизонтально встановленою на ньому штангою, на кінці якої рухомо прикріплений вертикальний плавник з механізмом зміни його інсталяційних кутів. Механізм приводу надає згаданій штанзі коливального руху у горизонтальній площині. Штанга виконана змінної довжини з гідравлічним механізмом для її зміни, до вільного кінця штанги жорстко прикріплений пружний елемент, що здатний взаємодіяти з плавником. Передбачений механізм синхронізації поперечних і повздовжніх коливань згаданої штанги. Технічним результатом є підвищення надійності та ефективності рушія. UA 115696 C2 (12) UA 115696 C2 UA 115696 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до суднобудування, зокрема до рушійного комплексу судна. Відомий плавниковий рушій (заявка на патент ФРН № 2 144 889, кл. В63Н 1/36, публ. 1977р.), який містить механізм приводу з горизонтально встановленою на ньому штангою, на кінці якої вертикально і рухливо прикріплений плавник з механізмом зміни його інсталяційних кутів, причому механізм приводу надає згаданій штанзі коливальний рух у горизонтальній площині. Такий пристрій має недостатню ефективність руху по причині відсутності додаткового повздовжнього руху плавника та відсутності пружного елемента, розташованого на вільному кінці згаданої штанги. Задача винаходу - підвищення ефективності руху суден по воді та економія палива. Поставлена задача вирішується тим, що у судновому плавниковому рушії, який містить механізм приводу з горизонтально встановленою на ньому штангою, на вільному кінці якої шарнірно прикріплений вертикальний плавник, причому механізм приводу надає згаданій штанзі коливального руху у горизонтальній площині, відповідно до винаходу, згадана штанга виконана змінної довжини з гідравлічним механізмом для її зміни та містить пружний елемент, що охоплює вільний кінець штанги та жорстко прикріплений з одного боку до його торця, а з іншого - до рухомої разом з плавником вздовж повздовжньої осі штанги верхньої частини шарніра плавника, причому до складу механізму приводу введений механізм синхронізації поперечних і повздовжніх коливань згаданої штанги. Поставлена задача вирішується також і тим, що згадана штанга виконана трубчастою та телескопічно розсувною, а гідравлічний механізм для зміни її довжини утворений її телескопічними частинами, одна з яких є гідроциліндром, а інша - розташованим у ньому поршнем, шток якого є згаданим вільним кінцем штанги. Поставлена задача вирішується також і тим, що згадана верхня частина шарніра плавника встановлена з можливістю переміщення вздовж штока поршня по напрямним, жорстко прикріпленим до гідроциліндра, де згадана верхня та нерухомо приєднана до плавника нижня частини шарніра утворюють механізм зміни інсталяційних кутів плавника. Поставлена задача вирішується також і тим, що згаданий пружний елемент виконаний у вигляді циліндричної пружини. Поставлена задача вирішується також і тим, що згаданий механізм синхронізації містить поперечину, що жорстко прикріплена до штанги та шарнірно - до корпусу судна, де поперечина здатна взаємодіяти з перемикачами для керування зазначеним гідравлічним механізмом. Теоретично доведемо необхідність введення у рушій-прототип додаткових ознак. Для кращого розуміння цього зробимо порівняльний аналіз пропонованого рушія та найпоширенішого рушія сучасних суден - гребного гвинта. Як відомо, гребний гвинт працює у воді по закону збереження імпульсу: це - 3-й закон Ньютона - реактивний рух (фіг. 1): m1v1=m2v2, (1) де m1v1 - імпульс відкинутої гребним гвинтом маси води (струмінь); m2v2 - імпульс маси судна. Як видно, судно отримує свій рух завдяки імпульсу відкинутої гребним гвинтом води (струменя), на що необоротно затрачається велика кількість кінетичної енергії: Е = mv2/2, (2) Ця енергія набагато більша, ніж енергія руху судна, що видно із співвідношення: E1/E2=m2/m1=v1/v2, (3) де Е1 та Е2 - енергія струменя та судна; m1, m2, v1, v2 - маси та швидкості відповідно струменя води та судна. Звернемось до природи руху істот, що нас оточують, у т. ч. людини. Чи відкидають вони якусь масу, якийсь струмінь? Ні, не відкидають. І якщо і є якийсь імпульс Землі від руху живих істот (людини, автомобілів, поїздів, тощо), то він такий малий (3), що ним сміливо можна знехтувати. Це ідеальний рух, тому що він цілковито віддзеркалює (відбиває) власну енергію рушія від величезної (порівняно з ними) маси Землі, яка практично залишається нерухомою і являє собою опору для руху. Це можна зобразити так (фіг. 2), що означає, що енергія взаємодії тіла кінцевої маси з тілом з масою, що наближається до нескінченності, - опорою - цілковито йде тільки на рух тіла кінцевої маси, а робота у напрямку опори не виконується (тому що опора нерухома), тому імпульс сили - Ft розвертається біля опори R на 180*, змінює свій знак на позитивний і діє, вивільняючи свій пружний потенціал, також на тіло кінцевої маси ml, утворюючи імпульс тіла mlvl. Маємо: 2Ft=2m1 v1. (4) Тобто подвоєний імпульс сили взаємодії утворює подвійний імпульс тіла-рушія. Якщо джерелом взаємодії є стиснута або розтягнута пружна циліндрична пружина, то це означає, що 1 UA 115696 C2 5 10 15 20 25 30 35 40 45 50 55 60 на тіло ml діє повний імпульс сили взаємодії, тобто обидва кінці цієї пружини уздовж її повздовжньої осі. Позначивши 2Ft=Ft, R| Ft=mv, (5) 2m1v1=mv, R| F=ma, (6) де а - прискорення тіла m. Як відомо, це - 2-й закон Ньютона - закон опорного, ідеального руху, тому що містить рух тільки одного тіла, яке для свого руху поглинає всю енергію взаємодії його з опорою. Тут він читається так: Пружна сила, яка діє на тіло m з боку опори R, називається силою реакції цієї опори. ("Курс загальної фізики") Це - точне визначення 2-го закону механіки. Таким чином, на тіло з боку опори діє пружна сила, яка спричиняє прискорення чи швидкість руху цього тіла. Без опори 2-й закон неможливий: якщо замість опори - друге тіло, то це - 3-й закон Ньютона, якщо замість опори - порожнеча (нуль), то це 1 -й закон. Як видно з рівняння (6), воно містить тіло, опору, пружну силу та прискорення. Пружна сила є наслідком вивільнення енергії пружно здеформованого тіла або його елемента, тобто пружного елемента, який і є носієм енергії взаємодії. Здеформувати ж пружний елемент може тільки взаємодія тіла та опори через відштовхування одного від одного, причому енергія для відштовхування забезпечується ззовні. Якщо джерелом енергії є тіло, то рух цього тіла відбувається за рахунок віддзеркалення його власної енергії через пружність при його взаємодії з опорою. Наприклад, пружний м'яч, падаючи з висоти на опору, пружно деформуючись, підскакує майже на попередню висоту кінетична енергія руху м'яча вниз (падіння) через власну пружність набула своєї реакції - віддзеркалення кінетичну енергію для свого руху угору. Таким чином, ми довели, що пропонований рушій має бути опорним відносно води згідно з 2-м законом механіки, тобто для свого руху повинен використовувати цілковито (теоретично) віддзеркалену від опори свою енергію, перетворену на пружну силу при відштовхуванні рушія від опори. Енергія для відштовхування може забезпечуватись, наприклад, за рахунок згоряння палива на рушії. Вищезазначене означає, що пропонований рушій має бути пружним, принаймні повинен мати функціональний пружний елемент. Тепер, власне, треба визначити, що таке опора води. Для цього проробимо дослід. Візьмемо діжку з водою, на поверхні якої розташуємо круглу (чи іншої форми) пластину з отвором у центрі, до країв якого прикріпимо гумову стрічку. У отвір помістимо металевий (наприклад, з алюмінію) штир до дотикання зі стрічкою, різко надавимо на штир і відпустимо його, причому попередньо приймемо руку від пластини. Штир повністю вискакує з води, пластина ж залишається майже нерухомою (див. відеоролик). Це - дія 2-го закону Ньютона у воді, де енергія ззовні - сила м'язів руки, яка через відштовхування від пластини передалась пружній гумовій стрічці та віддзеркалилась на рух штиря. Як видно, тут опорою води є лобовий опір пластини, розташованої на поверхні води. Повернувши цю систему з вертикального положення до горизонтального, отримуємо принципову побудову та дію пропонованого суднового плавникового рушія, де пластина - це опора води - власне плавник; штир - це судно; гумова стрічка - носій пружної енергії взаємодії рушія з водою - пружний елемент рушія. Різниця лише у тому, що рушій не "покидає" свою опору - плавник, а "носить" її з собою. Тепер визначимо, що є максимальною опорою води. Для цього розглянемо залежність гідродинамічних коефіцієнтів та сил від кутів атаки плавника у воді (фіг. 3). З фігури видно, що коефіцієнт Сr значно більший, ніж його складові - коефіцієнти лобового опору Сх та підйомної сили Су. Приведемо значення повної гідродинамічної сили плавника: 2 R=Cr•pv /2•S, (7) Сr - коефіцієнт повної гідродинамічної сили; р - щільність води; v - швидкість руху плавника; S - площа плавника. З рівняння (7) випливає, що для отримання максимальної опори води, тобто максимального значення повної гідродинамічної сили R плавника, треба використовувати максимальне значення її коефіцієнта Сr, тобто плавник повинен працювати на максимальних кутах атаки з водою. Це дасть можливість зменшити швидкість руху плавника та(або) його площу, а це, у свою чергу, суттєво зменшить профільний опір плавника - силу тертя його об воду. Таким чином, збільшення кута атаки плавника з водою веде до збільшення ефективності його (і судна у цілому) руху у воді. 2 UA 115696 C2 5 10 15 20 25 30 35 40 45 50 55 60 Для визначення при цьому траєкторії руху плавника відносно судна треба змінити його напрям руху, повернувши систему координат (фіг.3) проти годинникової стрілки на кут β між коефіцієнтами Су та Сr (фіг. 4) до збігу вектора коефіцієнта повної гідродинамічної сили з вектором ходу судна. Звідси видно, що для отримання руху судна по вектору повної гідродинамічної сили лопать повинна рухатись не тільки у поперечному напрямку по осі X, але також у напрямку осі Y з від'ємним знаком, тобто проти ходу судна зі швидкістю V відштовхування плавника від води. Сумарна траєкторія плавника відносно повздовжньої осі судна зображена на фіг. 5 з урахуванням того, що, по-перше, плавник рухається не тільки на активних ділянках, але і на холостих, паралельних вектору ходу судна, тому утворилась 8подібна траєкторія його руху відносно осі руху судна; по друге, рушій містить пружний елемент на штанзі, що призводить до руху плавника по відповідних опуклих траєкторіях, зважаючи на пружну деформацію цього елемента, тобто зміною довжини штанги упродовж її півмилі плавника залежно від накопичення пружної енергії (скорочення штанги) та віддачі пружної енергії руху судна (подовження її довжини до вихідного положення). Таким чином, замкнена траєкторія руху плавника відносно судна являє собою 8-подібну траєкторію, яка складається з двох активних ділянок АС і К1, коли судно рухається під дією пружної сили, та двох холостих ділянок КА і СІ, де плавник рухається під нульовим кутом атаки (флюгерне положення), коли судно рухається по інерції, тобто по 1-му закону Ньютона. Теоретично нами доведено: 1) Для умови ідеального(опорного) руху рушійний комплекс судна повинен містить пружний елемент, при цьому судно рухається згідно 2-го закону механіки (та при холостому ході - по 1-му закону). 2) Плавник здійснює коливальний рух не тільки у поперечному напрямку, а й у повздовжньому, тобто має складову швидкості, направлену проти ходу судна - швидкість відштовхування плавника рушія від водного середовища, що обумовлюється напрямом повної гідродинамічної сили по осі ходу судна. 3) Згідно із зазначеним, хід плавника являє собою 8-подібну замкнену траєкторію відносно судна (фіг. 5). Все перераховане вище відсутнє у прототипі, тому відмітні ознаки пропонованого рушія дозволяють йому досягти більш ефективного технічного результату, тобто зробити його рух у воді більш досконалим, що позитивно вплине на економію палива при русі суден по воді. Суть винаходу пояснюється ілюстраціями. На фіг. 1 зображена взаємодія двох тіл кінцевої маси - 3-й закон Ньютона; на фіг. 2 зображена взаємодія тіла кінцевої маси з опорою R, - 2-й закон Ньютона; на фіг. 3 показаний взаємний зв'язок, напрям дії та залежність гідродинамічних коефіцієнтів від кутів атаки плавника; на фіг. 4 зображено перетворення системи координат фіг. 3: поворот її проти годинникової стрілки на кут до збігу напряму повної гідродинамічної сили з напрямом осі руху судна для використання її як опори; на фіг. 5 показана кінематична схема суднового плавникового рушія: t - штанга змінної довжини; E - пружний елемент; S - повздовжній шарнір; АВ - накопичення пружної енергії; ВС - віддача пружної енергії руху судна; mn - величини стискання (розтягування) пружного елемента; KА і CL - холостий хід плавника. На фіг. 6 зображена принципова побудова (кінематична схема) суднового плавникового рушія та його пружного елемента; на фіг. 7 показані ходові випробовування катамарана з плавниковим рушієм (пневматичний); на фіг. 8 зображений катамаран з піднятою кормою; на фіг. 9 зображений плавниковий рушій, переведений з пневматики на гідравліку, - видний збільшений діаметр трубопроводів. Судновий плавниковий рушій (фіг. 6), містить плавник, шарнірно з'єднаний з механізмом 2 зміни інсталяційних кутів і з штоком 3 гідроциліндра 4 штанги змінної довжини 5, який містить випускні клапани 6 і 7, які приводяться в дію рухом штока 3 та штанги 5. Рушій містить гідроциліндри 8 і 9, штоки яких шарнірно з'єднані з поперечинами 10 і 11 тягами 12 і 13. Поперечина 10 шарнірно, через шарикопідшипник, прикріплена до корпуса судна(катамарана) та містить педалі 14 і 15; поперечина 11 також рухливо, через шарикопідшипник,прикріплена до корпуса судна та жорстко прикріплена до гідроциліндра 4. До гідроциліндрів 8 і 9 жорстко прикріплені перемикачі 16 і 17, ролики важелів яких мають змогу прокочуватись по скобахштовхачах 18 і 19, жорстко прикріпленими до штоків гідроциліндрів 8 і 9. Рушій містить трубопроводи 20, 21, 22, 23, 24, 25 зі зворотними клапанами 26. До гідроциліндра 4 жорстко 3 UA 115696 C2 5 10 15 20 25 30 35 40 45 50 прикріплені напрямні 27, по яких прокочуються підшипники 28, жорстко з'єднані з плавником 1 (для забезпечення його вертикальної стійкості). Плавник 1 шарнірно прикріплений до штока 3 за допомогою кронштейна 29 з наскрізним отвором, крізь який проходить шток 3 з можливістю його горизонтального руху відносно кронштейна 29, нижня частина якого являє собою верхню частину вертикального поперечного шарніра 30, яка містить жорстко прикріплені до неї два упори 31. Нижня частина шарніра 30 містить жорстко прикріплений до неї упор 32 та жорстко прикріплена до плавника 1. Шарнір 30 з упорами 31 і 32 утворює нерегульований механізм зміни інсталяційних кутів плавника напором води. До вільного кінця штока 3 жорстко прикріплена пластина-упор 33. Між кронштейном 29 та пластиною-упором 33 шток 3 охоплений пружною циліндричною пружиною 34, яка обома кінцями жорстко до них прикріплена. Циліндрична пружина 34 являє собою пружний елемент рушія, який, деформуючись під дією штока 3 з одного боку та наявності опори води у вигляді плавника, який використовує повний опір води (повну гідродинамічну силу) з іншого боку, пружно деформується (розтискається) з подальшим вивільненням пружної енергії у вигляді пружної сили, яка знову ж таки через шток 3 штовхає судно, надаючи йому руху чи прискорення руху. Окрім того, плавниковий рушій містить бак-ресивер 35 зі зворотними клапанами 36. Пристрій працює у такий спосіб. Поз. 1 - початок циклу руху плавника. Зусилля від педалі 15 через тяги 12 і 13 передається на поперечину 11, яка надає штанзі 5 кутового руху направо, а також на шток гідроциліндра 9, який подає рідину в гідроциліндр 4 через систему трубопроводів з перемикачем 17 і зворотним клапаном 26 та надає руху штанзі 5 з плавником 1. Поперечина 11 грає роль синхронізатора поперечного та повздовжнього коливань плавника: коли штанга 5 відхиляється направо на кут β, шток 3 переміщає плавник у поз. 2 і скобою натискає на перемикач 17; у цей момент клапан 7 закривається і рідина через клапан 6 подається у підпоршневий простір гідроциліндра 4, змінюючи довжину штанги 5, яка, відхилившись далі на кут γ вправо, вийде у положення 3. Судно на цій ділянці (поз. 2-3) буде йти по інерції з флюгерним положенням плавника. У подальшому клапани 6 і 7 спрацьовують у зворотному порядку (при дії на педаль 14), і штанга з плавником відхиляється вліво. Як видно з фіг. 6, ресивер 35 є проміжною ємністю для оборотної рідини гідросистеми рушія, а клапани 36, як і інші зворотні клапани пристрою, забезпечують односторонній рух рідини у трубопроводах. Треба констатувати, що велика в'язкість рідини на великій довжині трубопроводів викликала значний опір педалей, тому у такій версії рушій випробуваний не був. Саме така версія - гідравлічна - має перспективу, тому вона подана в опису і формулі винаходу. У промислових умовах пропонований рушій можна виготувати у великій ступені досконалості, для чого треба усунути згадані вище недоліки: максимально скоротити довжину трубопроводів з одночасним збільшенням їх площі поперечного перерізу до максимальної та застосуванням сучасних золотникових систем розподілу потоків, а також ретельно розрахувати, згідно закону Гука, пружний елемент. Такий рушій у суднобудуванні дасть високий технічний результат. Вважаємо за доцільне привести приклад з живої природи - рух риб. Повільні риби мають і малий розмах хвостового плавника і відповідно малу мускулатуру хвостового стебла (річкові риби - карп, тарань тощо). Щука має досить розвинений хвостовий плавник як для річкових риб. Але зважте на морських риб - меч-рибу, парусників, акул, дельфінів, тунців. У них хвостові плавники мають великий розмах при потужній мускулатурі хвостового стебла. При своєму русі вони хвостовими плавниками "ометають" велику площу води, тобто взаємодіють з великою кількістю води, яка залишається майже нерухомою, зважаючи на її велику масу, порівняно з масою цих риб, і рибі залишається лише пружно відштовхнутися від цієї маси води нерухомої опори - за допомогою своїх потужних пружних м'язів, здеформувати пружний плавник і отримати від нього реакцію, тобто зворотну дію - віддзеркалення своєї енергії від опори водного середовища та направити цю енергію на власний рух. Вони досягають швидкості більше 100 км/год. і це у щільному середовищі. Саме у результаті застосування до руху риб (та птахів) 3-го закону механіки - реактивного руху - і виник так званий "парадокс Грея". Пропонований судновий плавниковий рушій при ретельному виготовленні може бути досконалим (ідеальним), тому що використовує 2-й закон механіки - закон опорного руху. Винахід рекомендується застосувати при проектуванні важких суден. 55 ФОРМУЛА ВИНАХОДУ 60 1. Судновий плавниковий рушій, який містить механізм приводу з горизонтально встановленою на ньому штангою, на вільному кінці якої шарнірно прикріплений вертикальний плавник, причому механізм приводу надає згаданій штанзі коливального руху у горизонтальній площині, 4 UA 115696 C2 5 10 15 20 який відрізняється тим, що згадана штанга виконана змінної довжини з гідравлічним механізмом для її зміни та містить пружний елемент, що охоплює вільний кінець штанги та жорстко прикріплений з одного боку до його торця, а з іншого - до рухомої разом з плавником вздовж повздовжньої осі штанги верхньої частини шарніра плавника, причому до складу механізму приводу введений механізм синхронізації поперечних і повздовжніх коливань згаданої штанги. 2. Рушій за п. 1, який відрізняється тим, що згадана штанга виконана трубчастою та телескопічно розсувною, а гідравлічний механізм для зміни її довжини утворений її телескопічними частинами, одна з яких є гідроциліндром, а інша - розташованим у ньому поршнем, шток якого є згаданим вільним кінцем штанги. 3. Рушій за п. 2, який відрізняється тим, що згадана верхня частина шарніра плавника встановлена з можливістю переміщення вздовж штока поршня по напрямних, жорстко прикріплених до гідроциліндра, де згадана верхня та нерухомо приєднана до плавника нижня частини шарніра утворюють механізм зміни інсталяційних кутів плавника. 4. Рушій за будь-яким з пп. 1-3, який відрізняється тим, що згаданий пружний елемент виконаний у вигляді циліндричної пружини. 5. Рушій за будь-яким з пп. 1-4, який відрізняється тим, що згаданий механізм синхронізації містить поперечину, що жорстко прикріплена до штанги та шарнірно - до корпусу судна, де поперечина здатна взаємодіяти з перемикачами для керування зазначеним гідравлічним механізмом. 5 UA 115696 C2 6 UA 115696 C2 7 UA 115696 C2 8 UA 115696 C2 Комп’ютерна верстка Л. Бурлак Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B63H 1/36, B63H 16/18, A63B 35/02
Мітки: плавниковий, рушій, судновий
Код посилання
<a href="https://ua.patents.su/11-115696-sudnovijj-plavnikovijj-rushijj.html" target="_blank" rel="follow" title="База патентів України">Судновий плавниковий рушій</a>
Плавниковий рушій
Номер патенту: 88807
Опубліковано: 25.03.2014
Автори: Сидоренко Юрій Григорович, Бейлін Георгій Володимирович, Петренко Сергій Юрійович
МПК: B63H 13/00
Мітки: рушій, плавниковий
Формула / Реферат:
Плавниковий рушій, що містить корпус, плавник у вигляді крила, кінематично зв'язаний з приводом, і механізм керування рушієм, виконаний у вигляді системи важелів, який відрізняється тим, що рушій містить щонайменше два однакових вертикальних плавники, горизонтальні осі яких співпадають з напрямком створення тяги, поворотний пристрій, призначений для завдання напрямку вектора тяги, корпус виконаний у вигляді вертикальної труби, механізм...
Судновий гусенично-лопатевий рушій
Номер патенту: 74030
Опубліковано: 17.10.2005
Автори: Агризько Володимир Валерійович, Белінський Едуард Валерійович
МПК: B63H 1/34
Мітки: судновий, гусенично-лопатевий, рушій
Формула / Реферат:
Судновий гусенично-лопатевий рушій, що складається з двох суцільно розташованих, паралельних одна до одної, гусеничних стрічок, кожна з яких насаджена на допоміжні ролики та ведучі барабани, які з’єднані півосями з диференціалом, який відрізняється тим, що кожна з гусеничних стрічок має Н – подібний профіль та обладнана гребними лопатями, розташованими на її зовнішній поверхні перпендикулярно до неї.
Судновий гусенично-лопатевий рушій
Номер патенту: 12300
Опубліковано: 16.01.2006
Автори: Агризько Володимир Валерійович, Стемпень Віктор, Белінський Едуард Валерійович
МПК: B63H 1/34
Мітки: судновий, гусенично-лопатевий, рушій
Формула / Реферат:
1. Судновий гусенично-лопатевий рушій, що складається з двох суцільних розташованих паралельно одна до одної гусеничних стрічок, кожна з яких насаджена на барабани, один з яких ведучий - призначений для з'єднання півосями з диференціалом, який кінематично з'єднаний з двигуном, а кожна із згаданих стрічок обладнана розташованими на її зовнішній поверхні гребними лопатями, який відрізняється тим, що гребні лопаті на зовнішній поверхні кожної із...
Судновий рушій гусеничний
Номер патенту: 39590
Опубліковано: 10.03.2009
Автор: Чарнецький Олег Євстафійович
МПК: B63H 1/00
Мітки: судновий, гусеничний, рушій
Формула / Реферат:
Судновий рушій гусеничний, який містить ведучий і ведений шківи, гусеничну стрічку з шарнірно закріпленими на ній гребними елементами, який відрізняється тим, що гребні елементи мають форму підводних крил, розташованих на стояках гусеничної стрічки.
Судновий напівзанурений рушій
Номер патенту: 19663
Опубліковано: 25.12.1997
Автор: Слинько Петро Петрович
Мітки: напівзанурений, рушій, судновий
Формула / Реферат:
1. Судовой полупогружной движитель, содержащий гребной вал, размещенный под углом к продольной вертикальной плоскости судна, с полупогружными гребными лопастями, размещенными с возможностью изменения положения по отношению к продольной вертикальной плоскости и/или к основной плоскости судна, отличающийся тем, что при входе в воду нагнетающая сторона каждой лопасти расположена по существу перпендикулярно продольной вертикальной плоскости...
Попередній патент: Спосіб геоелектророзвідки
Наступний патент: Пристрій для відділення пет-пластівців в процесі переробки
Випадковий патент: Спосіб діагностики порушень гемодинаміки