Плавниковий рушій
Номер патенту: 88807
Опубліковано: 25.03.2014
Автори: Бейлін Георгій Володимирович, Петренко Сергій Юрійович, Сидоренко Юрій Григорович
Формула / Реферат
Плавниковий рушій, що містить корпус, плавник у вигляді крила, кінематично зв'язаний з приводом, і механізм керування рушієм, виконаний у вигляді системи важелів, який відрізняється тим, що рушій містить щонайменше два однакових вертикальних плавники, горизонтальні осі яких співпадають з напрямком створення тяги, поворотний пристрій, призначений для завдання напрямку вектора тяги, корпус виконаний у вигляді вертикальної труби, механізм керування рушієм містить вал, встановлений з можливістю осьових поворотів в корпусі, верхній кінець якого кінематично з'єднаний з приводом, виконаним, наприклад, у вигляді поворотного гідроциліндра, до нижньої частини вала, розміщеної ззовні корпуса на різних за висотою рівнях і перпендикулярно до нього, жорстко прикріплені дві пари паралельних перших важелів, відповідно, верхня і нижня пари, кожна з яких лежить на одній горизонтальній прямій, однойменні кінці кожної пари перших важелів шарнірно з'єднані з серединами відповідних других важелів, що лежать в одній площині з першими, кінці кожної пари других важелів, що лежать в одній площині, шарнірно з'єднані тягами між собою і з корпусом та утворюють паралелограми, відповідно верхній і нижній, найближчі середини других важелів верхнього і нижнього паралелограмів жорстко з'єднані між собою торсіонами, а кожен плавник встановлений вертикально, жорстко прикріплений своєю центральною частиною до відповідного торсіона і перпендикулярно до найближчого другого важеля з можливістю коливань в горизонтальній площині навколо осі торсіона, яка ділить плавник на дві нерівні частини, менша з яких співпадає з напрямком створення тяги.
Текст
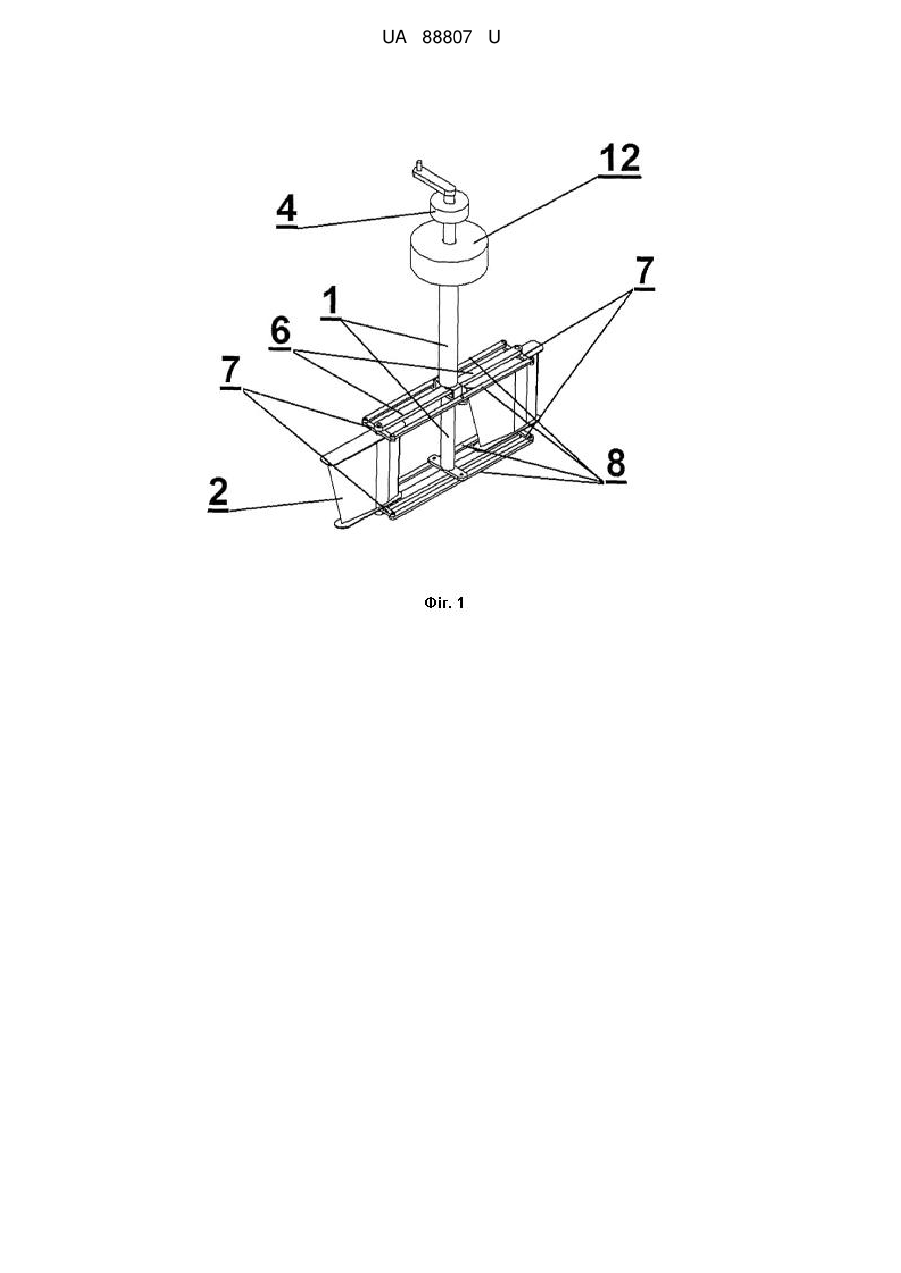
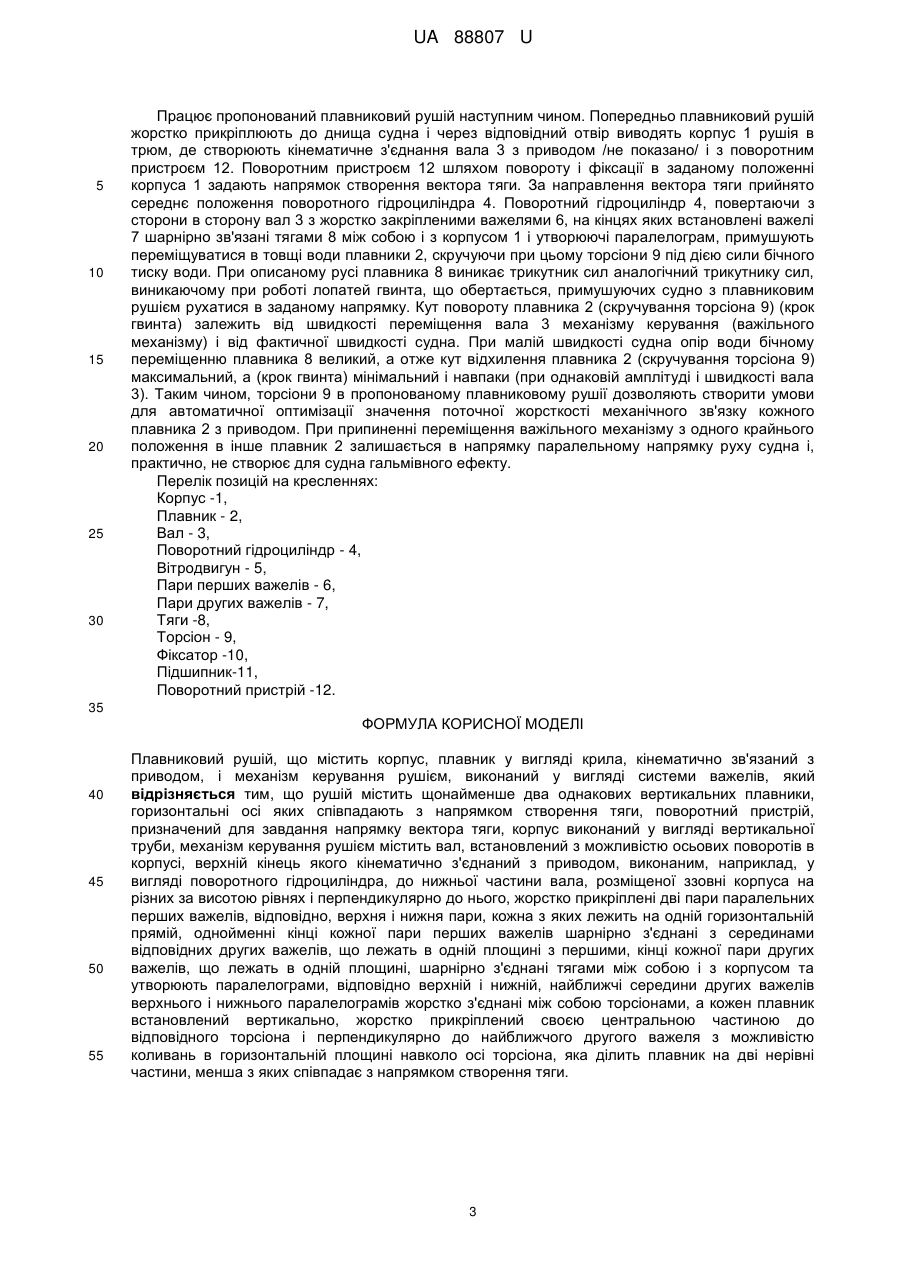
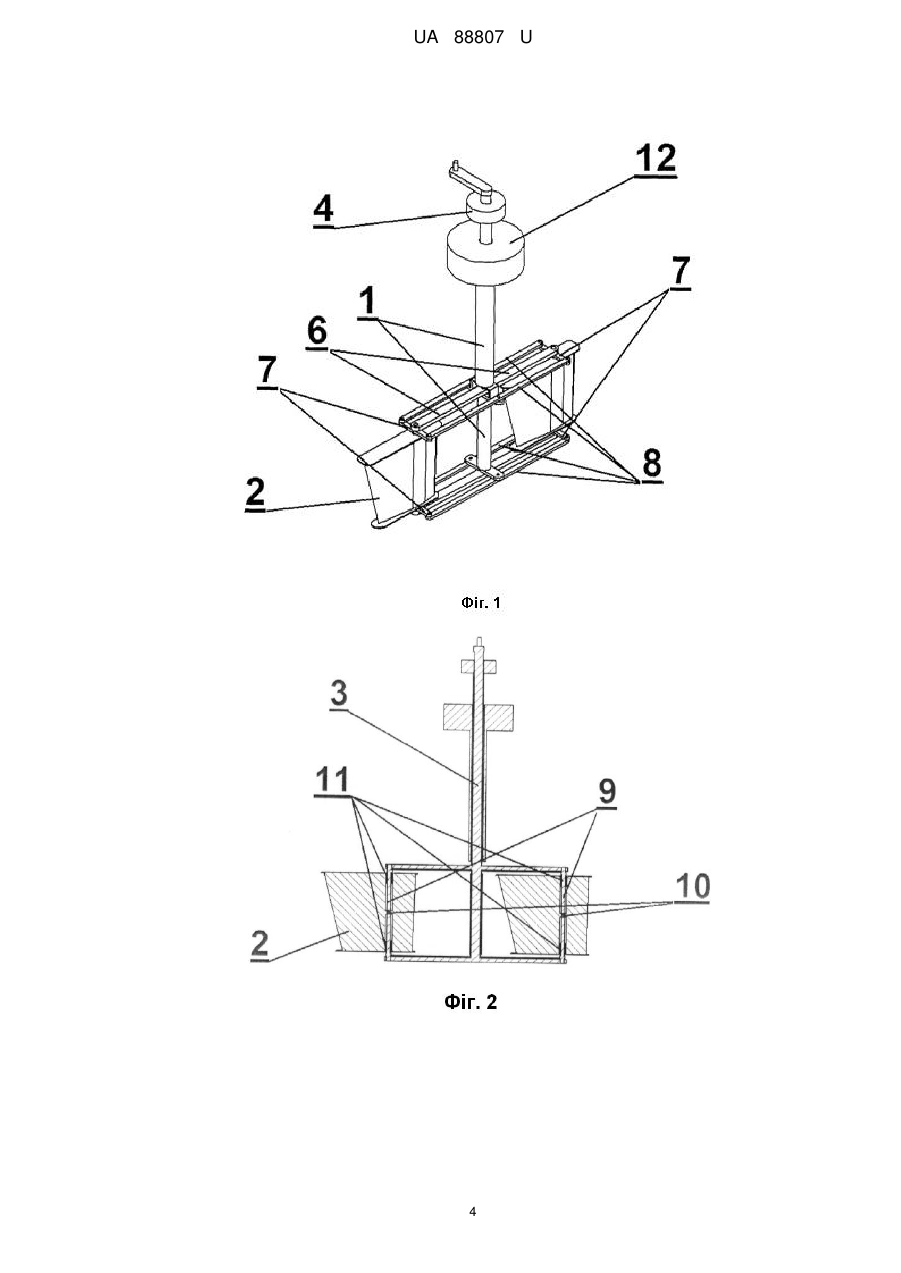
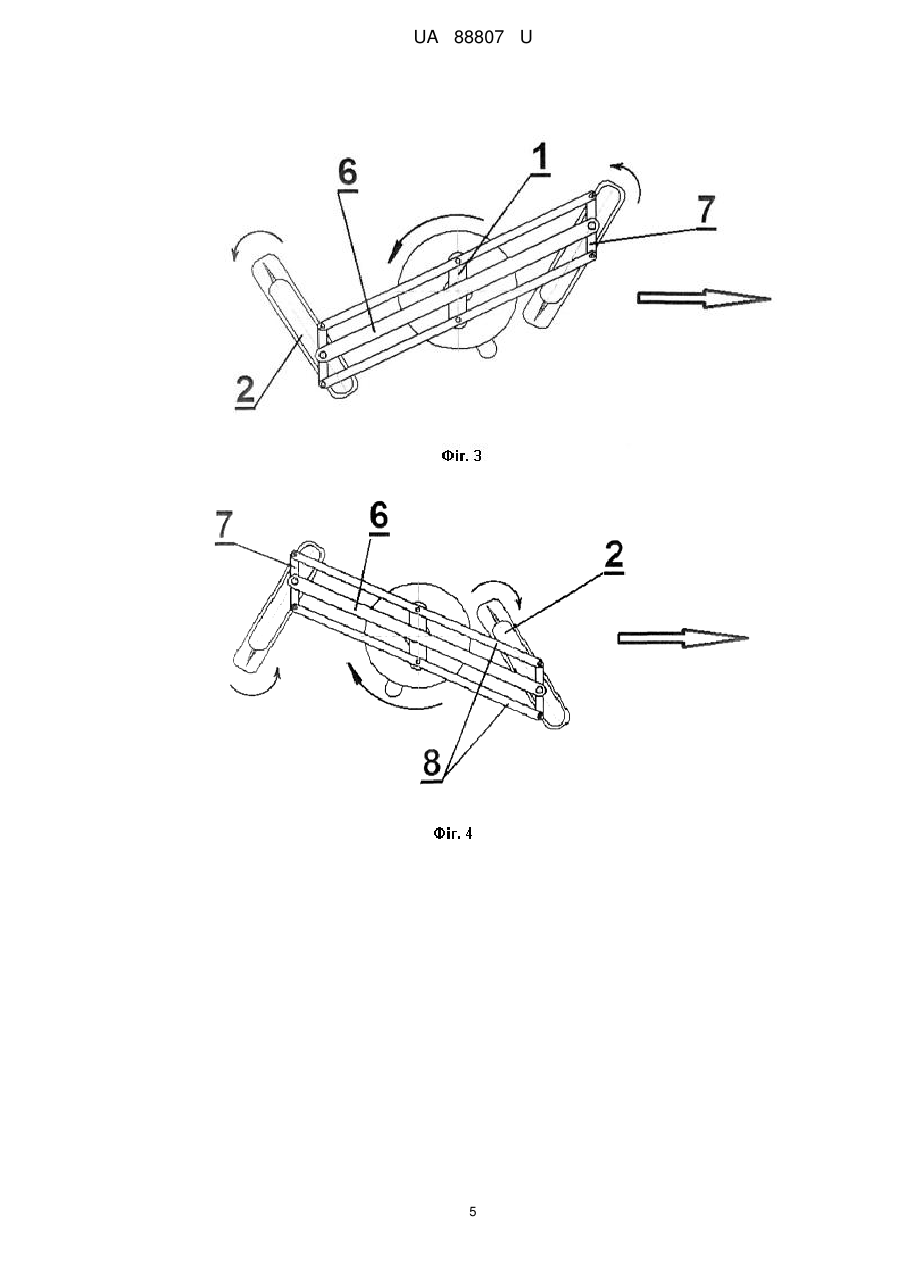
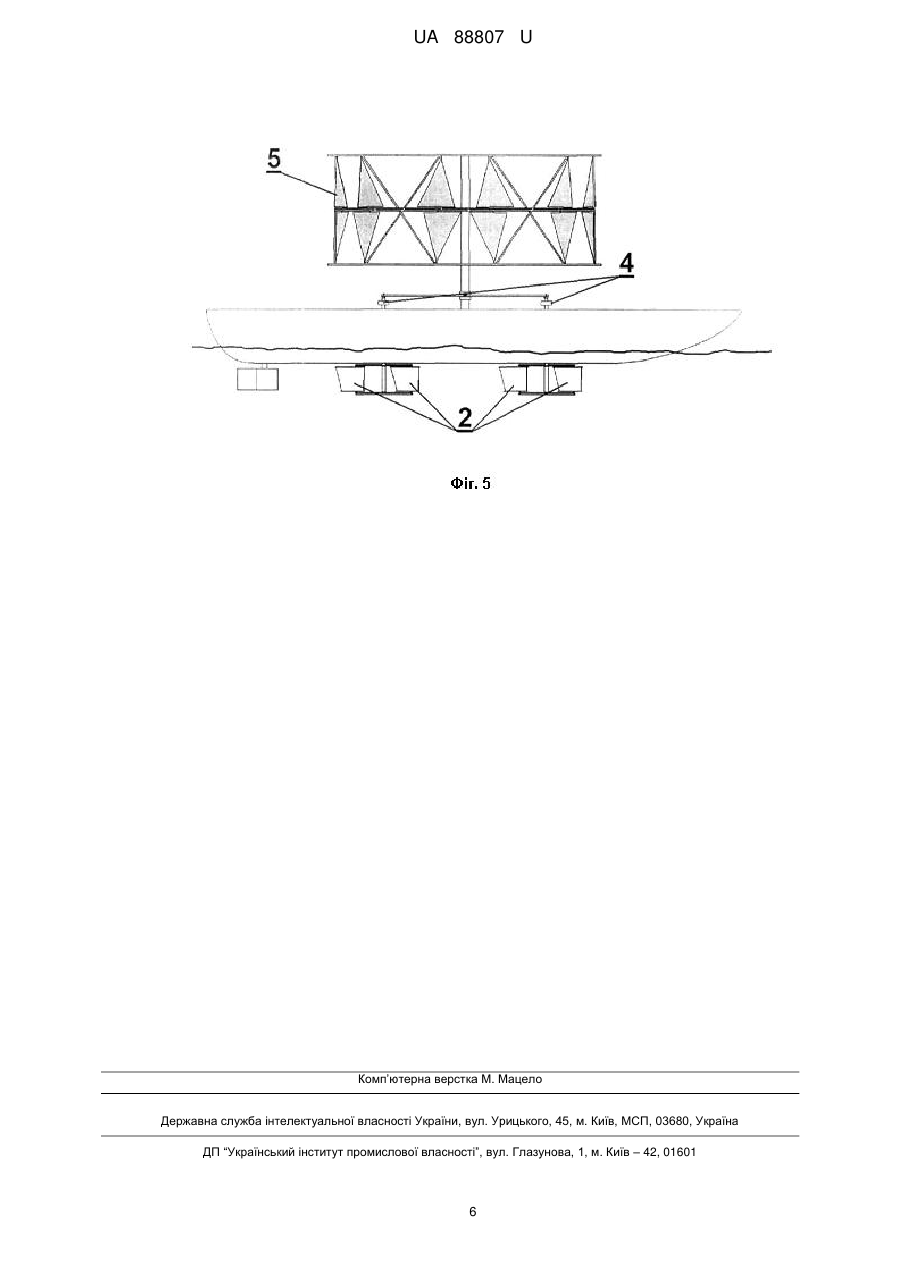
Реферат: Плавниковий рушій містить корпус, плавник у вигляді крила, кінематично зв'язаний з приводом, і механізм керування рушієм, виконаний у вигляді системи важелів. Рушій містить щонайменше два однакових вертикальних плавники, горизонтальні осі яких співпадають з напрямком створення тяги, поворотний пристрій, призначений для завдання напрямку вектора тяги, корпус виконаний у вигляді вертикальної труби, механізм керування рушієм містить вал, встановлений з можливістю осьових поворотів в корпусі, верхній кінець якого кінематично з'єднаний з приводом, виконаним, наприклад, у вигляді поворотного гідроциліндра, до нижньої частини вала. UA 88807 U (12) UA 88807 U UA 88807 U 5 10 15 20 25 30 35 40 45 50 55 Пропонована корисна модель належить до суднобудівельної галузі, а більш точно - до конструкції судового плавникового рушія, призначеного для створення горизонтального вектора тяги. Пропонований плавниковий рушій може бути використаний, наприклад, як допоміжного рушія на вітрильних суднах. Найбільш близьким до пропонованого пристрою за технічною суттю є плавниковий рушій, що містить корпус, плавник у вигляді крила, кінематично зв'язаний з приводом і механізм керування рушієм, виконаний у вигляді системи важелів [Патент на винахід № 2041129, Російська Федерація, МПК 6 В63Н1/36, В63Н19/02, опубліковано: 09.08.1995]. Через жорсткий механічний зв'язок плавника із приводом керування згаданим рушієм є досить складним, оскільки для зміни напрямку вектора тяги необхідне застосування досить складного поворотного механізму. Крім того, при вимкненому рушії він створює значний гальмівний ефект для руху судна, що обмежує широке використання описаного пристрою. В основу пропонованої корисної моделі поставлена задача створення такого плавникового рушія, який був би більш керованим, а також дозволив би зменшити гальмівний ефект при вимкненому рушії. Поставлена задача вирішується за рахунок створення умов для автоматичної оптимізації поточної жорсткості механічного зв'язку плавника з приводом шляхом використання в кінематичному ланцюгу рушія торсіонів. Пропонований, як і відомий плавниковий рушій, містить корпус, плавник у вигляді крила, кінематично зв'язаний з приводом і механізм керування рушієм, виконаний у вигляді системи важелів, а, згідно до корисної моделі, рушій містить щонайменше два однакових вертикальних плавника, горизонтальні осі яких співпадають з напрямком створення тяги, поворотний пристрій, призначений для завдання напрямку вектора тяги, корпус виконаний у вигляді вертикальної труби, механізм керування рушієм містить вал, встановлений з можливістю осевих поворотів в корпусі, верхній кінець якого кінематично з'єднаний з приводом, виконаний, наприклад, у вигляді поворотного гідроциліндра, до нижньої частини вала, розміщеної ззовні корпуса на різних за висотою рівнях і перпендикулярно до нього жорстко прикріплені дві пари паралельних перших важелів, відповідно, верхня і нижня пари, кожна з яких лежить на одній горизонтальній прямій, однойменні кінці кожної пари перших важелів шарнірно з'єднані з серединами відповідних других важелів, що лежать в одній площині з першими, кінці кожної пари других важелів, що лежать в одній площині, шарнірно з'єднані тягами між собою і з корпусом та утворюють паралелограми, відповідно верхній і нижній, найближчі середини других важелів верхнього і нижнього паралелограмів жорстко з'єднані між собою торсіонами, а кожен плавник встановлений вертикально, жорстко прикріплений своєю центральною частиною до відповідного торсіона і перпендикулярно до найближчого другого важеля з можливістю коливань в горизонтальній площині навколо осі торсіона, яка ділить плавник на дві нерівні частини, менша з яких співпадає з напрямком створення тяги. Кожен плавник виконаний у вигляді крила двоопуклої симетричної форми, яке орієнтовано в напрямку руху судна, розташоване вертикально і встановлено з можливістю коливань (переміщень) в горизонтальній площині під днищем в товщі води в напрямку від одного борта судна до іншого і навпаки. При цьому зберігається початкова орієнтація вертикальної площини, навколо якої коливається плавник. Орієнтацію вертикальної площини, навколо якої коливається плавник, задають важільним механізмом, виконаним у вигляді паралелограма. Вісь поворотів підвісу кожного плавника, виконана у вигляді торсіону, проходить через отвір в плавнику і ділить його на дві нерівні по площі поверхні, менша з яких направлена в сторону руху судна - в напрямку створення тяги. При цьому плавник жорстко прикріплений своєю центральною частиною до торсіона. Завдяки цьому при переміщеннях механізму керування рушієм важільного механізму - в товщі води з одного крайнього положення в інше відбувається рух плавника з позитивним кутом атаки до напрямку руху судна за рахунок скручування торсіона під дією різниці сил, виникаючих від різниць тисків води на різні (нерівні) по площі частини бічної поверхні. Це відбувається через асиметричне кріплення плавника на торсіоні. Крім сказаного, асиметричне кріплення плавника дозволяє знизити рівень крутильних навантажень на торсіон і продовжити термін його експлуатації (ресурс). При описаному русі плавника виникає трикутник сил, подібний трикутнику сил, що діє на лопаті гвинта, що обертається, що примушує судно з пропонованим рушієм рухатися в заданому напрямку. Кут повороту плавника (скручування торсіона) (крок гвинта) залежить від швидкості переміщення механізму керування рушієм важільного механізму - і від фактичної швидкості судна. При малій швидкості судна кут відхилення максимальний, а значить крок - мінімальний і навпаки. При припиненні переміщень важільного механізму з одного крайнього положення в інше плавник займає напрямок паралельний напрямкові руху судна, а тому, практично, не створює гальмівного ефекту. 1 UA 88807 U 5 10 15 20 25 30 35 40 45 50 55 Зміна початкового положення (поворот) важільного механізму відносно напрямку руху судна дає можливість отримати вектор тяги у потрібному напрямку, наприклад, виконувати або підрулювання, або рух судна боком, або розвертання на місці. Для зменшення навантажень на механізм до складу плавникового рушія входять два плавника, розташовані симетрично відносно осі пристрою, а для зниження підрулюючого ефекту можна використовувати два, послідовно встановлених рушія для одинарного корпусу судна, що працюють у фазі і два паралельно встановлених рушія для суден типу катамаран, що працюють у протифазі. Пропонований плавниковий рушій, агрегатований з вітродвигуном з вертикальною віссю обертання ротора, дозволяє побудувати екологічно чисте судно, яке здатне рухатися під будьяким заданим кутом до напрямку вітру. При використанні пропонованого плавникового рушія як допоміжного на звичайному вітрильному судні такий рушій в загальмованому стані - при русі під вітрилом - може виконувати функцію кіля противаги. За час проведення патентно-інформаційних досліджень при підготовці даної заявки авторами не виявлені конструкції плавникового рушія з вказаною вище сукупністю суттєвих ознак, що доводить відповідність пропонованого технічного рішення критерію корисної моделі "новизна". Новий технічний результат, отриманий в результаті здійснення пропонованої корисної моделі полягає в створенні умов для автоматичної оптимізації значення поточної жорсткості механічного зв'язку плавника з приводом шляхом застосування в кінематичному ланцюгу рушія торсіонів. Пропонований плавниковий рушій складається з конструктивних елементів, для виготовлення яких використовують відомі на сьогоднішній день технологічні прийоми, засоби і матеріали. Він може бути використаний в якості екологічно чистого рушія в суднах, призначених як для перевезення вантажів, так і пасажирів і відносяться до різних галузей, а тому можна зробити висновок про те, що пропоноване рішення відповідає критерію корисної моделі "промислова придатність". Суть пропонованого плавникового рушія показана на схематичних кресленнях. На фіг. 1 показано зовнішній вигляд рушія. На фіг. 2 показано переріз рушія. На фіг. 3 і фіг. 4 показано рушій у роботі. На фіг. 5 показано зовнішній вигляд судна з плавниковим рушієм, агрегатованим з вітродвигуном, що має вертикальну вісь обертання ротора. Плавниковий рушій містить корпус 1, два плавника 2, кожний з яких виконаний у вигляді крила, розташованого вертикально, а горизонтальна вісь крила співпадає з напрямком створення тяги. Корпус 1 виконаний у вигляді вертикальної труби. Плавниковий рушій також містить механізм керування, що містить вал 3, встановлений з можливістю осевих поворотів в корпусі 1. Верхній кінець валу 3 з'єднаний з приводом /не показано/. Привід може бути виконаний, наприклад, у вигляді поворотного гідроциліндру 4 і/або важеля, кінематично сполученого з двигуном внутрішнього згорання /не показано/ або з вітродвигуном 5. В якості вітродвигуна 5 може бути використаний пристрій, що відповідає формулі патенту України на корисну модель № 78806, опублікованої 25.03.2013 р. в офіційному бюлетені "Промислова власність" № 6/2013 Державної служби інтелектуальної власності України. До нижньої частини вала 3, розташованої зовні корпуса на різних за висотою рівнях і перпендикулярно до нього жорстко прикріплені дві пари паралельних перших важелів 6, відповідно, верхня і нижня пари, кожна з яких лежить на одній горизонтальній прямій. Однойменні кінці кожної пари перших важелів 6 шарнірно з'єднані з серединами відповідних других важелів 7, що лежать в одній площині з першими. Кінці кожної пари других важелів 7, що лежать в одній площині шарнірно з'єднані тягами 8 між собою і з корпусом 1 і утворюють паралелограми, відповідно верхній і нижній. Найближчі середини других важелів 7 верхнього і нижнього паралелограмів жорстко з'єднані між собою торсіонами 9, а кожний плавник 2 жорстко закріплений вертикально на відповідному торсіоні 9 і перпендикулярно до найближчого другого важеля 7 з можливістю коливань в горизонтальній площині навколо осі торсіона 9. При цьому вісь торсіона 9 ділить відповідний плавник 2 на дві нерівні частини, меншу з яких розташовують в напрямку створення тяги. Плавники 2 закріплені на торсіонах 9 за допомогою фіксаторів 10 і підшипників 11. Плавниковий рушій також містить поворотний пристрій 12, призначений для надання рушію напрямку вектора тяги, який виконаний у вигляді основи, призначеного для його жорсткого кріплення до корпусу судна і важеля шарнірно встановленого в основі і призначеного для його з'єднання з корпусом 1 і фіксації кутового положення останнього відносно основи. 2 UA 88807 U 5 10 15 20 25 30 Працює пропонований плавниковий рушій наступним чином. Попередньо плавниковий рушій жорстко прикріплюють до днища судна і через відповідний отвір виводять корпус 1 рушія в трюм, де створюють кінематичне з'єднання вала 3 з приводом /не показано/ і з поворотним пристроєм 12. Поворотним пристроєм 12 шляхом повороту і фіксації в заданому положенні корпуса 1 задають напрямок створення вектора тяги. За направлення вектора тяги прийнято середнє положення поворотного гідроциліндра 4. Поворотний гідроциліндр 4, повертаючи з сторони в сторону вал 3 з жорстко закріпленими важелями 6, на кінцях яких встановлені важелі 7 шарнірно зв'язані тягами 8 між собою і з корпусом 1 і утворюючі паралелограм, примушують переміщуватися в товщі води плавники 2, скручуючи при цьому торсіони 9 під дією сили бічного тиску води. При описаному русі плавника 8 виникає трикутник сил аналогічний трикутнику сил, виникаючому при роботі лопатей гвинта, що обертається, примушуючих судно з плавниковим рушієм рухатися в заданому напрямку. Кут повороту плавника 2 (скручування торсіона 9) (крок гвинта) залежить від швидкості переміщення вала 3 механізму керування (важільного механізму) і від фактичної швидкості судна. При малій швидкості судна опір води бічному переміщенню плавника 8 великий, а отже кут відхилення плавника 2 (скручування торсіона 9) максимальний, а (крок гвинта) мінімальний і навпаки (при однаковій амплітуді і швидкості вала 3). Таким чином, торсіони 9 в пропонованому плавниковому рушії дозволяють створити умови для автоматичної оптимізації значення поточної жорсткості механічного зв'язку кожного плавника 2 з приводом. При припиненні переміщення важільного механізму з одного крайнього положення в інше плавник 2 залишається в напрямку паралельному напрямку руху судна і, практично, не створює для судна гальмівного ефекту. Перелік позицій на кресленнях: Корпус -1, Плавник - 2, Вал - 3, Поворотний гідроциліндр - 4, Вітродвигун - 5, Пари перших важелів - 6, Пари других важелів - 7, Тяги -8, Торсіон - 9, Фіксатор -10, Підшипник-11, Поворотний пристрій -12. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 Плавниковий рушій, що містить корпус, плавник у вигляді крила, кінематично зв'язаний з приводом, і механізм керування рушієм, виконаний у вигляді системи важелів, який відрізняється тим, що рушій містить щонайменше два однакових вертикальних плавники, горизонтальні осі яких співпадають з напрямком створення тяги, поворотний пристрій, призначений для завдання напрямку вектора тяги, корпус виконаний у вигляді вертикальної труби, механізм керування рушієм містить вал, встановлений з можливістю осьових поворотів в корпусі, верхній кінець якого кінематично з'єднаний з приводом, виконаним, наприклад, у вигляді поворотного гідроциліндра, до нижньої частини вала, розміщеної ззовні корпуса на різних за висотою рівнях і перпендикулярно до нього, жорстко прикріплені дві пари паралельних перших важелів, відповідно, верхня і нижня пари, кожна з яких лежить на одній горизонтальній прямій, однойменні кінці кожної пари перших важелів шарнірно з'єднані з серединами відповідних других важелів, що лежать в одній площині з першими, кінці кожної пари других важелів, що лежать в одній площині, шарнірно з'єднані тягами між собою і з корпусом та утворюють паралелограми, відповідно верхній і нижній, найближчі середини других важелів верхнього і нижнього паралелограмів жорстко з'єднані між собою торсіонами, а кожен плавник встановлений вертикально, жорстко прикріплений своєю центральною частиною до відповідного торсіона і перпендикулярно до найближчого другого важеля з можливістю коливань в горизонтальній площині навколо осі торсіона, яка ділить плавник на дві нерівні частини, менша з яких співпадає з напрямком створення тяги. 3 UA 88807 U 4 UA 88807 U 5 UA 88807 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюSidorenko Yurii Hryhorovych, Beilin Heorhii Volodymyrovych, Petrenko Serhii Yuriiovych
Автори російськоюСидоренко Юрий Григорьевич, Бейлин Георгий Владимирович, Петренко Сергей Юрьевич
МПК / Мітки
МПК: B63H 13/00
Мітки: рушій, плавниковий
Код посилання
<a href="https://ua.patents.su/8-88807-plavnikovijj-rushijj.html" target="_blank" rel="follow" title="База патентів України">Плавниковий рушій</a>
Плавниковий рушійний пристрій

Номер патенту: 98185
Опубліковано: 25.04.2012
Автор: Говерт Вермейден Якоб
МПК: B63H 1/36
Мітки: пристрій, рушійній, плавниковий
Формула / Реферат:
1. Рушійний пристрій, встановлений всередині корпусу (1) морського судна, який містить щонайменше один плавник (2), що поступально переміщується в поперечному напрямі, прикріплений до вала (6) плавника засіб для приводу вказаного плавника (2), який містить колінчастий вал (9), механізм коливань відносно поперечної осі для повороту вказаного плавника (2) навколо осі вказаного вала (6) плавника і механізм переміщення у вертикальній площині для...
Водометний рушій

Номер патенту: 87359
Опубліковано: 10.02.2014
Автори: Артюхов Анатолій Миколайович, Кравцов Андрій Олександрович, Оришака Володимир Олексійович, Оришака Олег Володимирович
МПК: B63H 1/00, F16K 47/00
Мітки: водометний, рушій
Формула / Реферат:
1. Водометний рушій, який містить водометну трубу, в якій розташований гвинт з приводом, до якої жорстко приєднаний прискорювач руху рідини, який відрізняється тим, що на вході в прискорювач руху рідини встановлений блок, який має конусну поверхню зі сторони корпуса прискорювача, що створює камеру, в якій змонтовані ізольовано від корпусу і блока електроди, що з'єднані з генератором електричних імпульсів.2. Водометний рушій за п. 1,...
Гідродинамічний навантажувальний пристрій для випробувань суднових комплексів “двигун-рушій” на стапелях
Номер патенту: 71137
Опубліковано: 15.11.2004
Автор: Кирда Володимир Григорович
МПК: B63B 9/00, B63H 21/00, B63B 9/02
Мітки: комплексів, гідродинамічний, випробувань, пристрій, навантажувальний, суднових, двигун-рушій, стапелях
Формула / Реферат:
1. Гідродинамічний навантажувальний пристрій для випробування суднових комплексів "двигун-рушій" на стапелях, що містить камеру з рушієм і заслінками, який відрізняється тим, що штатний рушій (гребний гвинт) встановлений на валу, який з'єднаний з гребним валом судна, при цьому рушій знаходиться в потоці рідини, наприклад води, визначеної щільності, якою заповнені потоконапрямні канали з поворотними заслінками, крім того пристрій...
Водометний рушій

Номер патенту: 63507
Опубліковано: 10.10.2011
Автори: Ткач Анатолій Анатолійович, Зіновік Олена Валентинівна, Оришака Володимир Олексійович, Оришака Олег Володимирович, Зіновік Михайло Аркадійович, Тищенко Людмила Василівна
МПК: B63H 1/00, F16K 47/00
Мітки: водометний, рушій
Формула / Реферат:
1. Водометний рушій, що містить водометну трубу, в якій розташований гвинт з приводом, а також системи керування і автоматики, який відрізняється тим, що у водометній трубі встановлений прискорювач руху рідини, який включає зовнішню жорстку трубу, пристрій для створення гідравлічних ударів, що містить пружну трубу, яка розташована концентрично зовнішній жорсткій трубі і входить в гідравлічне кільце, що містить обертовий кран, насос,...
Спосіб випробування суднового комплексу “двигун-рушій” на стапелі
Номер патенту: 71136
Опубліковано: 15.11.2004
Автор: Кирда Володимир Григорович
МПК: B63H 1/18, B63B 9/02, G01M 10/00
Мітки: комплексу, випробування, двигун-рушій, суднового, стапелі, спосіб
Формула / Реферат:
1.Спосіб випробування суднових комплексів "двигун-рушій" на стапелі, який відрізняється тим, що безпосередньо на стапелі заводу-будівника обладнують спеціальний випробувальний комплекс і визначають експлуатаційні характеристики комплексу "двигун-рушій" при змінних навантаженнях на гребний гвинт (рушій), які створюють в робочій камері, яку заповнюють водою і встановлюють на візок для переміщення по стапельній...
Попередній патент: Енергетична установка “сбп-1″
Наступний патент: Похідні 3-(2,6-диметилбензилокси)фенілоцтової кислоти
Випадковий патент: Спосіб місцевого лікування вугрової хвороби