Спосіб визначення місцезнаходження об’єкта
Номер патенту: 116119
Опубліковано: 10.05.2017
Автори: Прімін Михайло Андрійович, Недайвода Ігор Володимирович

Формула / Реферат
Спосіб визначення місцезнаходження об'єкта заснований на тім, що об'єкт розташовують у магнітному полі; вибирають місцезнаходження точок спостереження в площині, яка не має точок перетину з об'єктом; реєструють значення вектора магнітної індукції та його просторових похідних першого та другого порядку в кожній з вибраних точок, який відрізняється тим, що в кожній точці спостереження розташовують одноканальний аксіальний градієнтометр другого порядку; напрямок осі градієнтометра співпадає з напрямком нормалі до площини вимірювань; за отриманими значеннями перших і других просторових похідних вектора магнітної індукції виділяють точки спостереження, які найбільш віддалені від об'єкта, і визначають напрямок з кожної виділеної точки на об'єкт, а потім за значеннями вектора магнітної індукції визначають відстань від кожної виділеної точки до об'єкта; після чого за отриманими результатами визначають місце розташування об'єкта в просторі.
Текст
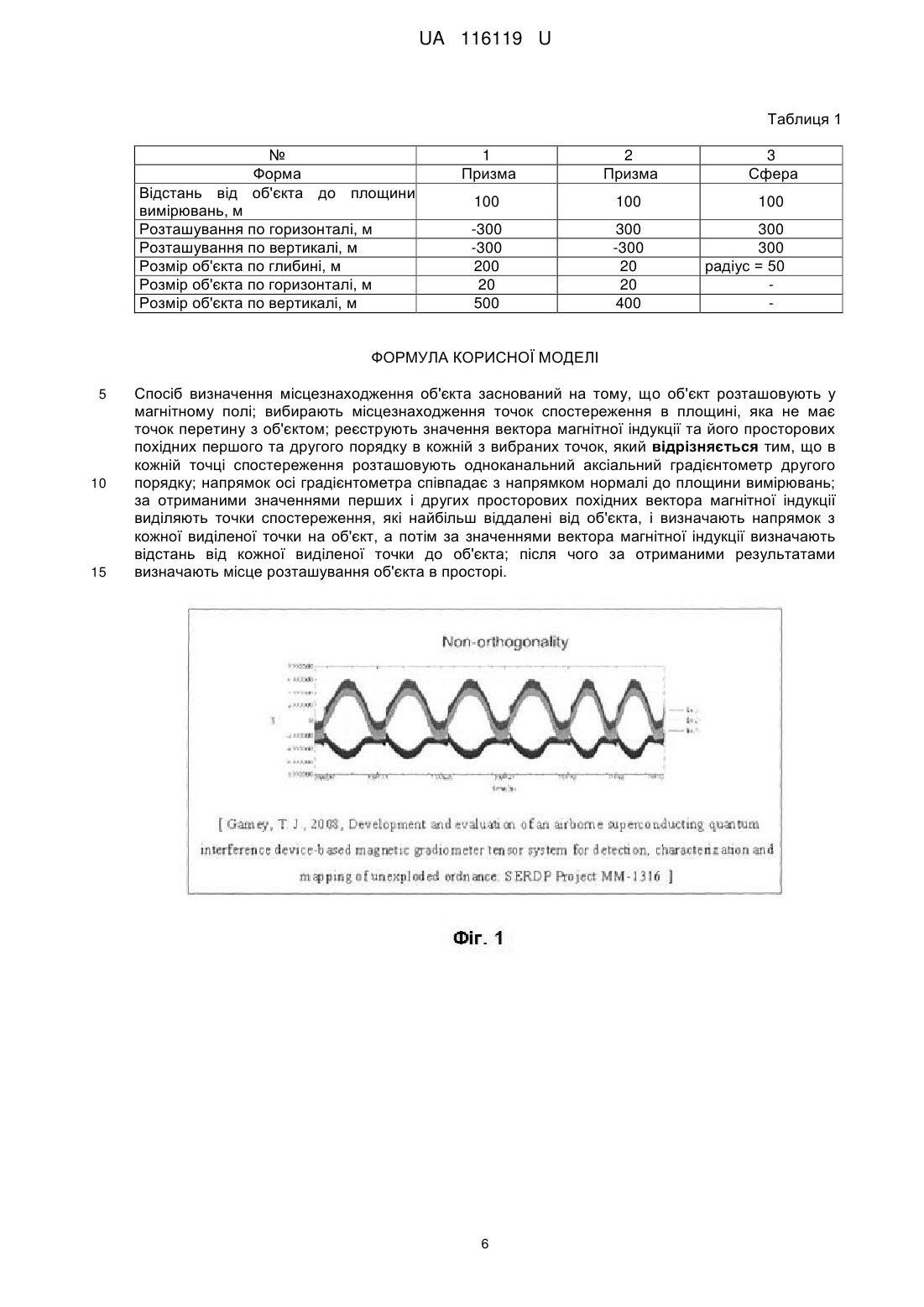
Реферат: Спосіб визначення місцезнаходження об'єкта заснований на тому, що об'єкт розташовують у магнітному полі; вибирають місцезнаходження точок спостереження в площині, яка не має точок перетину з об'єктом; реєструють значення вектора магнітної індукції та його просторових похідних першого та другого порядку в кожній з вибраних точок. В кожній точці спостереження розташовують одноканальний аксіальний градієнтометр другого порядку, причому напрямок осі градієнтометра співпадає з напрямком нормалі до площини вимірювань. За отриманими значеннями перших і других просторових похідних вектора магнітної індукції виділяють точки спостереження, які найбільш віддалені від об'єкта, і визначають напрямок з кожної виділеної точки на об'єкт. За значеннями вектора магнітної індукції визначають відстань від кожної виділеної точки до об'єкта; після чого за отриманими результатами визначають місце розташування об'єкта в просторі. UA 116119 U (12) UA 116119 U UA 116119 U 5 10 15 20 25 30 35 40 45 50 55 60 Модель належить до області вимірювань перемінних магнітних величин і може бути використано для контролю за місцезнаходженням і переміщенням транспортних засобів, для пошуку феромагнітних тіл у Землі або в воді, для пошуку корисних копалин, під час проведення магнітокардіографічних і магнітоенцефалографіческіх досліджень. Відомий спосіб визначення місця розташування об'єкта, де в кожній точці спостереження розташовують 16 магнітометрів [Burghoff, M, Schnabel, A, Drung, D, Thiel, F, Knappe-Gruneberg, S, Hartwig, S, Kosch, O, Trahms, L, Koch, H, Discrimination of Multiple Sources Using a SQUID Vector Magnetometer, Neurology and Clinical Neurophysiology 2004, v.67, p. 1-3]. При цьому взаємне розташування і орієнтація в просторі магнітометрів реалізовані за спеціалізованої схемою таким чином, що в заданій точці простору реєструють значення вектора магнітної індукції і п'яти просторових похідних першого порядку цього вектора. Точками спостереження є 6 × 6 вузлів прямокутної решітки з кроком 40 мм по обидва напрямкам, які розташовані в площині над грудною кліткою пацієнта з прив'язкою до анатомічних орієнтирів пацієнта. При цьому передбачається, що є попередня інформація про місцезнаходження об'єкта, а для опису магнітного поля описаних джерел використовується дипольне наближення. Використання попередньої інформації про місцезнаходження об'єкта, а також ітераційного процесу порівняння результатів вимірювань з результатами обчислень магнітного поля дипольного джерела в точках розташування магнітометрів призводять до істотного зниження точності визначення місця розташування об'єкта, що є недоліком зазначеного способу. В описаному способі розташування в просторі датчиків магнітного поля фіксоване, а схема вимірювань в 36 точках прямокутної плоскої решітки реалізується за допомогою послідовних переміщень об'єкта. При цьому пацієнт розташовується на кушетці, яка переміщається в лабораторній системі координат (щодо датчиків магнітного поля) в площині. Алгоритм переміщень об'єкта реалізується за допомогою спеціалізованої електромеханічної системи, яка одночасно фіксує (визначає, задає) координати кожної точки спостереження. Крім того для визначення місця розташування точок вимірювання в системі координат, пов'язаної як з об'єктом так і з датчиками магнітного поля, використовуються спеціалізовані системи, наприклад, на основі референтних джерел магнітного поля [Спосіб визначення місцезнаходження об'єкта. Патент на корисну модель № 96206. Зареєстровано в Державному реєстрі патентів України на корисні моделі 26.01.2015]. Використання схеми "нерухомий датчик магнітного поля переміщається об'єкт" обумовлено значними погрішностями, які виникають при переміщенні датчика магнітного поля в просторі. Перш за все це сигнал, що виникає при переміщенні датчика в геомагнітному полі (магнітне поле Землі) - по відношенню до об'єкта досліджень це шумовий сигнал. Далі - вплив магнітних полів індустріального походження (мережеві гармоніки, сигнали від металевих об'єктів, що переміщаються поблизу від точки спостереження, сигнали від близько розташованої електронної апаратури і т.д.). Зазначені сигнали реєструються і при фіксованому положенні датчика магнітного поля, однак при переміщенні вимірювача ці сигнали значно посилюються зважаючи на істотну неоднорідність по простору (магнітне поле зазначених джерел істотно неоднорідне по простору - змінюється від точки до точки вимірювань). Таким чином кероване зміна місця розташування об'єкта в просторі за заданим алгоритмом є суттєвою операцією описаного способу. В результаті описаний спосіб не може бути використаний для визначення місця розташування об'єкта, який розташований в Землі або під водою. Як прототип (найбільш близький до способу, що заявляється) вибраний спосіб визначення місця розташування об'єкта [WO Patent 2008/154679 А1, METHOD AND APPARATUS FOR DETECTION USING MAGNETIC GRADIENT TENSOR, G 01 V 3/08, G 01 R 33/02, Date of Patent: June 18, 2007]. Об'єкт розташований в магнітному полі Землі. Об'єкт має феромагнітні властивості і створює магнітне поле в точках спостереження, які розташовані в площині. При цьому площина вимірів не має точок перетину з об'єктом. У кожній точці спостереження магнітне поле реєструють за допомогою векторного магнітометра і п'яти градієнтометрів першого порядку. Після чого визначають значення вектора магнітної індукції і його перших просторових похідних у вузлах прямокутної рівномірної решітки в площині вимірювань. При цьому крок решітки і її місце розташування в площині вибирають виходячи з попередньої інформації про місцезнаходження об'єкта. Для кожного вузла плоскої прямокутної решітки за значеннями перших просторових похідних вектора магнітної індукції визначають напрямок на об'єкт. Після чого за значеннями вектора магнітної індукції в тій же точці визначають відстань до об'єкта. Крім того в кожному вузлі плоскою решітки визначають значення просторових інваріантів першого, другого і третього порядків. За розподілом зазначених інваріантів в площині вимірювань також визначають місце розташування об'єкта. 1 UA 116119 U 5 10 15 20 25 30 35 40 45 50 Таким чином спосіб-прототип передбачає, що в кожній точці спостереження розташовані одночасно векторний магнітометр і п'ять градієнтометрів першого порядку. Це пов'язано з властивостями однорідності магнітного поля - якщо точка спостереження розташована в немагнітному безпровідному однорідному середовищі (в повітрі), то для вектора магнітної індукції справедливі однорідні рівняння Максвелла rot B=0, div B=0 (1) Звідси випливає, що матриця перших просторових похідних вектора магнітної індукції B x B x B x y z x B y B y B y D1 (2) y z x Bz Bz Bz x y z симетрична і не має сліду. Таким чином з дев'яти елементів зазначеної матриці незалежними являються тільки п'ять, наприклад Вх/у, Вх/z, By/у, Ву/z, Bz/z. Виходячи з цього в кожній точці спостереження розташовують векторний магнітометр і п'ять градієнтометрів першого порядку, що дає повний набір інформації про магнітне поле об'єкта. Однак реалізація описаної послідовності операцій способу-прототипу має істотні обмеження на точність і надійність визначення місцезнаходження об'єкта. Використання п'яти градієнтометрів для вимірювання магнітного поля в різних точках площини вимірів призводить до істотного зниження точності визначення місця розташування об'єкта. У способі-прототипі для реєстрації магнітного поля використовуються вузли нерегулярної плоскої решітки. При цьому розміри області спостереження набагато перевищують розміри об'єкта. Позначимо результати N вимірювань як ψ1, ψ2,…, ψN і припустимо, що точка спостереження розташована в немагнітному, безпровідному однорідному просторі, наприклад в повітрі. Тоді з однорідних рівнянь Максвелла (1) випливає, що силові лінії магнітного поля замкнені: інтеграл вектора магнітної індукції в довільній площині простору поза об'ємом об'єкта дорівнює нулю. У тому числі розподіл однієї складової вектора магнітної індукції для магнітного диполя являє собою дві області з позитивними і негативними значеннями. Для сталого вирішення поставленого завдання і заданого рівня точності визначення координат об'єкту розміри області спостереження вибирають таким чином, щоб для результатів вимірювань виконувалася умова ψ10 …. Щодо способу-прототипу це означає, що датчики магнітного поля (градієнтометри і векторний магнітометр) переміщують в площині вимірювань, по обох напрямках. При реалізації переміщень в просторі орієнтація осей градієнтометра відносно лабораторної системи координат змінюється як відповідно до алгоритму переміщень (в тому числі і на 90 або на 180 градусів), так і поза контролем (за рахунок механічних впливів, умови місця проведення вимірювань - наявності ям, пагорбів, рітвін і т.д.). При цьому виникають систематичні похибки. Дослідження показали, що похибка вимірювань магнітного поля за допомогою градієнтометра, напрямок осі якого паралельно площині вимірювань і який переміщується в просторі в двох взаємоортогональних напрямках, в більшості випадків становить не менше 25 %, а в окремих випадках може досягати 100 % [Gamey, TJ, 2008, Development and evaluation of an airborne superconducting quantum interference device-based magnetic gradiometer tensor system for detection, characterization and mapping of unexploded ordnance: SERDP Project MM-1316]. На мал. 1 наведені результати вимірювань магнітного поля об'єкта за допомогою трьох магнітометрів, які розташовані в одній точці простору і мають однаковий напрямок осі реєструється х-ая складова вектора магнітної індукції [Gamey, TJ, 2008, Development and evaluation of an airborne superconducting quantum interference device-based magnetic gradiometer tensor system for detection, characterization and mapping of unexploded ordnance: SERDP Project MM-1316]. У вигляді графіків показані синхронні результати вимірювань вихідного сигналу магнітометрів при переміщенні точки вимірювань по колу в площині XOY. Наведені результати дозволяють в явному вигляді оцінити систематичні похибки - по одному з каналів значення магнітного поля змінюється на протилежне (похибка більше 100 %). В результаті для способу-прототипу отримуємо, що точність визначення координат об'єкту визначається систематичною похибкою вимірювань магнітного поля, яка пов'язана зі зміною (порушенням) ортогональності градієнтометру і становить понад 25 %. Крім того рівень систематичних похибок при реєстрації як вектора магнітної індукції, так і п'яти перших просторових похідних вектора магнітної індукції визначається як власними шумами датчиків, так і геомагнітних полем і індустріальними перешкодами. Ортогональность 2 UA 116119 U 5 10 15 20 25 30 35 40 45 50 55 60 осей градієнтометру, відмінності процедур балансування в однорідному магнітному полі також призводять до суттєвого зростання систематичних похибок (в порівнянні з результатами вимірювань векторного магнитометра). Вплив похибок градієнтометричних вимірювань магнітного поля, пов'язаних з балансуванням градієнтометра в однорідному магнітному полі, на точність рішення задачі локалізації об'єкта добре відомо, значення похибки визначення координат об'єкта може становити до 10 %. Разом з тим використання п'яти градієнтометрів для вимірювання магнітного поля призводить до істотного зниження надійності оскільки для визначення координат об'єкту в способі-прототипі використовуються одночасно всі незалежні просторові похідні вектора магнітної індукції. Таким чином вихід з ладу (відмова, втрата працездатності, зміна робочої точки чутливого елемента) навіть одного градієнтометра призводить до неможливості визначити місце розташування об'єкта. В основу моделі поставлена технічна задача підвищити точність та надійність визначення місцезнаходження об'єкта. Поставлена технічна задача вирішується тим, що в способі визначення місцезнаходження об'єкта об'єкт розташовують в магнітному полі; вибирають місце розташування точок спостереження в площині, яка не має точок перетину з об'єктом; реєструють значення вектора магнітної індукції і його просторових похідних першого і другого порядку в кожній вибраній точці; відповідно до моделі в кожній точці спостереження розташовують одноканальний аксіальний градієнтометр другого порядку; напрямок осі градієнтометра збігається з напрямком нормалі до площини вимірів; за отриманими значеннями перших і других просторових похідних вектора магнітної індукції виділяють точки спостереження, які найбільш віддалені від об'єкта, і визначають напрямок з кожної виділеної точки на об'єкт, а потім за значеннями вектора магнітної індукції визначають відстань від кожної виділеної точки до об'єкта, після чого по отриманим результатам визначають місцезнаходження об'єкта в просторі. Реєстрація магнітного поля одноканальним аксіальним градієнтометром другого порядку в площині вимірювань дозволяє визначити значення вихідного сигналу градієнтометра ψ в заданих точках зазначеній площині, наприклад в N х N вузлах прямокутної рівномірної плоскою решітки з заданим кроком. Ця операція реалізується за допомогою процедур двовимірної інтерполяції і гладкого заповнення даних (Примин М.А., Недайвода И.В. Алгоритм интерполяции магнитометрических данных при исследовании магнитного поля сердца человека, УСиМ, 2006, № 3, стр. 22-31). За отриманими значеннями в кожному із зазначених вузлів прямокутної рівномірної решітки визначають значення вектора магнітного індукції і його перших і просторових похідних. А саме: (1) в хвильової площини (kх, kу, 0) виділяють N х N вузлів прямокутної рівномірної плоскої решітки з заданим кроком; (2) реалізують пряме подвійне просторове перетворення Фур'є - в кожному із зазначених вузлів хвильової площини визначають значення Фур'є-образу вихідного сигналу градієнтометра F [ψ] (3) за значеннями Фур'є-образу вихідного сигналу градієнтометра і відомої (заданої) конструкції трансформатора магнітного потоку градієнтометра визначають значення фур'єобразу z-ой складової вектора магнітної індукції F[Bz]=Р[Ψ]/(1-ехр(-L*k)) (2а) F[Bz]=F[Ψ]/(1-2*exp(2L*k)+exp(-2*L*k)), (2б) (4) за отриманими значеннями визначають значення фур'є-образів складових вектора магнітної індукції і його перших просторових похідних F[Bx]=-i*kx*F[Bz]/k, F[By]=-i*ky*F[Bz]/k, F[Вх/у]=kx*ky*F[Bz]/k, F[By/y]=ky*ky*F[Bz]/k, (2в) F[Bz/x]=-i*kx*F[Bz], F[Bz/y]=-i*ky*F[Bz], F[Bz/z]=-k*F[Bz] (5) реалізують зворотне подвійне просторове перетворення Фур'є - в кожному із зазначених вузлів в площині вимірювань визначають значення вектора магнітної індукції і його перших просторових похідних. Для того, щоб оцінити похибки реєстрації перших просторових похідних вектора магнітної індукції розглянемо наступну модельну задачу. Припустимо, що об'єкт має сферичну форму, радіусом 50 м і розташований на відстані (глибині) 100 м від площини вимірів. Просторова конфігурація об'єкта у вигляді схеми показана на мал. 2. Об'єкт розташований в магнітному полі Землі, вектор магнітної індукції якого спрямований уздовж осі OZ - нормалі до площини вимірів. Область спостереження має розмір 1000 м по обох напрямках. Така просторова конфігурація відповідає умовам пошуку намагнічених тіл в Землі. У кожній з 31 × 31 точок спостереження 3 UA 116119 U 5 10 15 20 25 30 35 40 45 50 55 60 (вузлів рівномірної прямокутної решітки) обчислювалося значення вихідного сигналу градієнтометра з наступними значеннями конструктивних параметрів - радіус прийомних котушок 25 мм, "база" градієнтометра 35 мм. Отримані значення вихідного сигналу градієнтометр першого і другого порядку показані у вигляді магнітної карти в режимі заповнення кольором проміжків між ізолініями сигналу на мал. 2. За значеннями вихідного сигналу градієнтометра була реалізована процедура визначення значень вектора магнітної індукції і його перших просторових похідних в точках спостереження. Просторовий розподіл перших просторових похідних вектора магнітної індукції у вигляді магнітних карт показано на мал. 2 для градієнтометрів першого і другого порядку. Таким чином наведений модельний приклад показує, що пропонований спосіб дозволяє визначити значення вектора магнітної індукції і його перших просторових похідних для довільного об'єкта із заданим рівнем точності (в даному прикладі сумарне значення похибки визначення параметрів магнітного поля не перевищує 2 %). Отримані значення перших просторових похідних вектора магнітної індукції використовуються для виділення точок площини вимірювання, які найбільш віддалені від об'єкта. Для цього в кожній точці спостереження визначають значення просторового градієнта магнітного поля g B z / x 2 B z / y 2 (3) За отриманими значеннями визначають максимальне значення g max просторового градієнта g по всіх точках спостереження. Після чого виділяють точки спостереження, де виконується умова g
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A62B 33/00, G01R 33/00
Мітки: об'єкта, визначення, місцезнаходження, спосіб
Код посилання
<a href="https://ua.patents.su/11-116119-sposib-viznachennya-misceznakhodzhennya-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцезнаходження об’єкта</a>
Спосіб визначення місцезнаходження об’єкта
Номер патенту: 96206
Опубліковано: 26.01.2015
Автори: Прімін Михайло Андрійович, Недайвода Ігор Володимирович
МПК: G01R 33/00
Мітки: спосіб, місцезнаходження, визначення, об'єкта
Формула / Реферат:
Спосіб визначення місцезнаходження об'єкта, який засновано на тому, що джерела магнітного поля у вигляді витків зі струмом мають рівну площу й не перетинаються; зазначені джерела магнітного поля розташовують у кожній із чотирьох різних точок об'єкта таким чином, що зазначені точки розташовані на двох взаємноортогональних прямих, на фіксованій відстані від точки перетинання зазначених прямих і симетрично щодо зазначеної точки перетинання;...
Спосіб визначення місцезнаходження об’єкта
Номер патенту: 111005
Опубліковано: 10.03.2016
Автори: Прімін Михайло Андрійович, Недайвода Ігор Володимирович
МПК: A62B 33/00, E21F 11/00, G01R 33/00
Мітки: об'єкта, спосіб, місцезнаходження, визначення
Формула / Реферат:
Спосіб визначення місцезнаходження об'єкта, оснований на тому, що джерела магнітного поля у вигляді витків зі струмом мають рівну площу й не перетинаються; зазначені джерела магнітного поля розташовують у кожній із чотирьох різних точок об'єкта таким чином, що зазначені точки розташовані на двох взаємно ортогональних прямих, на фіксованій відстані від точки перетинання зазначених прямих і симетрично щодо зазначеної точки перетинання;...
Спосіб визначення положення або місцезнаходження компонентів в установках для видобутку корисних копалин і гірничодобувна установка
Номер патенту: 104473
Опубліковано: 10.02.2014
Автори: Алер Марко, Моррісон Кемпбелл, Вассельманн Йоханнес
МПК: F25D 23/06
Мітки: установка, установках, копалин, компонентів, визначення, гірничодобувна, видобутку, положення, корисних, місцезнаходження, спосіб
Формула / Реферат:
1. Спосіб визначення положення і/або місцезнаходження компонентів установки для видобутку корисних копалин, зокрема вугледобувної установки, яка містить як компоненти установки щонайменше один забійний конвеєр (2) для переміщення видобутого матеріалу, одне захисне кріплення (13) для підтримки забою (1) відкритим, рушійні пристрої (14) для просування забійного конвеєра (2) і захисного кріплення (13) під час активної роботи, виїмкову машину...
Спосіб визначення місцезнаходження витоку рідкого або газового середовищ у виробах
Номер патенту: 38524
Опубліковано: 12.01.2009
Автор: НАЦІОНАЛЬНИЙ АВІАЦІЙНИЙ УНІВЕРСИТЕТ (НАУ)
МПК: F17D 5/02, G01M 3/00, G01N 29/00
Мітки: газового, рідкого, спосіб, виробах, середовищ, місцезнаходження, витоку, визначення
Формула / Реферат:
Спосіб визначення місцезнаходження витоку рідкого або газового середовищ у виробах, що включає встановлення на об'єкті контролю двох датчиків, реєстрацію сигналів акустичної емісії з одночасним вимірюванням положення в часі енергетичного центра ваги пікового сигналу у взаємній кореляційній функції, за яким визначають місцезнаходження витоку рідкого або газового середовищ у виробах, який відрізняється тим, що спочатку проводять інверсію...
Спосіб визначення місцезнаходження нижніх торців електродів у ванні рудовідновної печі
Номер патенту: 71987
Опубліковано: 17.01.2005
Автор: Капелянов Володимир Якович
МПК: F27B 3/28, H05B 7/156, H05B 7/148
Мітки: визначення, печі, місцезнаходження, торців, ванни, електродів, рудовідновної, спосіб, нижніх
Формула / Реферат:
Спосіб визначення місцезнаходження нижніх торців електродів у ванні рудовідновлювальної печі, що складається з заглиблення електродів у шихту, заміру теплофізичних та електричних параметрів, який відрізняється тим, що протягом 2...4 циклів від випуску до випуску розплаву з печі дослідний електрод заглиблюють з встановленим у процесі топлення даного сплаву середнім перепуском, регулюючи струм у електродах у заданих параметрах, заглиблюючи...
Попередній патент: Активізатор води об’ємний
Наступний патент: Штангенциркуль адаптивний
Випадковий патент: Роторний випарник