Штангенциркуль адаптивний

Формула / Реферат
Штангенциркуль адаптивний, що складається з вимірювальної штанги разом з нерухомою губкою, з рухомої рамки разом з відліковим пристроєм та рухомою губкою, з рухомої термоізоляційної ручки та термоізоляційної ручки, також пристрою тарованого зусилля, який відрізняється тим, що термоізоляційна ручка через власний тарований пристрій натискає на нерухому губку вздовж осі торкання деталі, також рухома термоізоляційна ручка через власний тарований пристрій натискає на рухому губку вздовж осі торкання деталі.
Текст
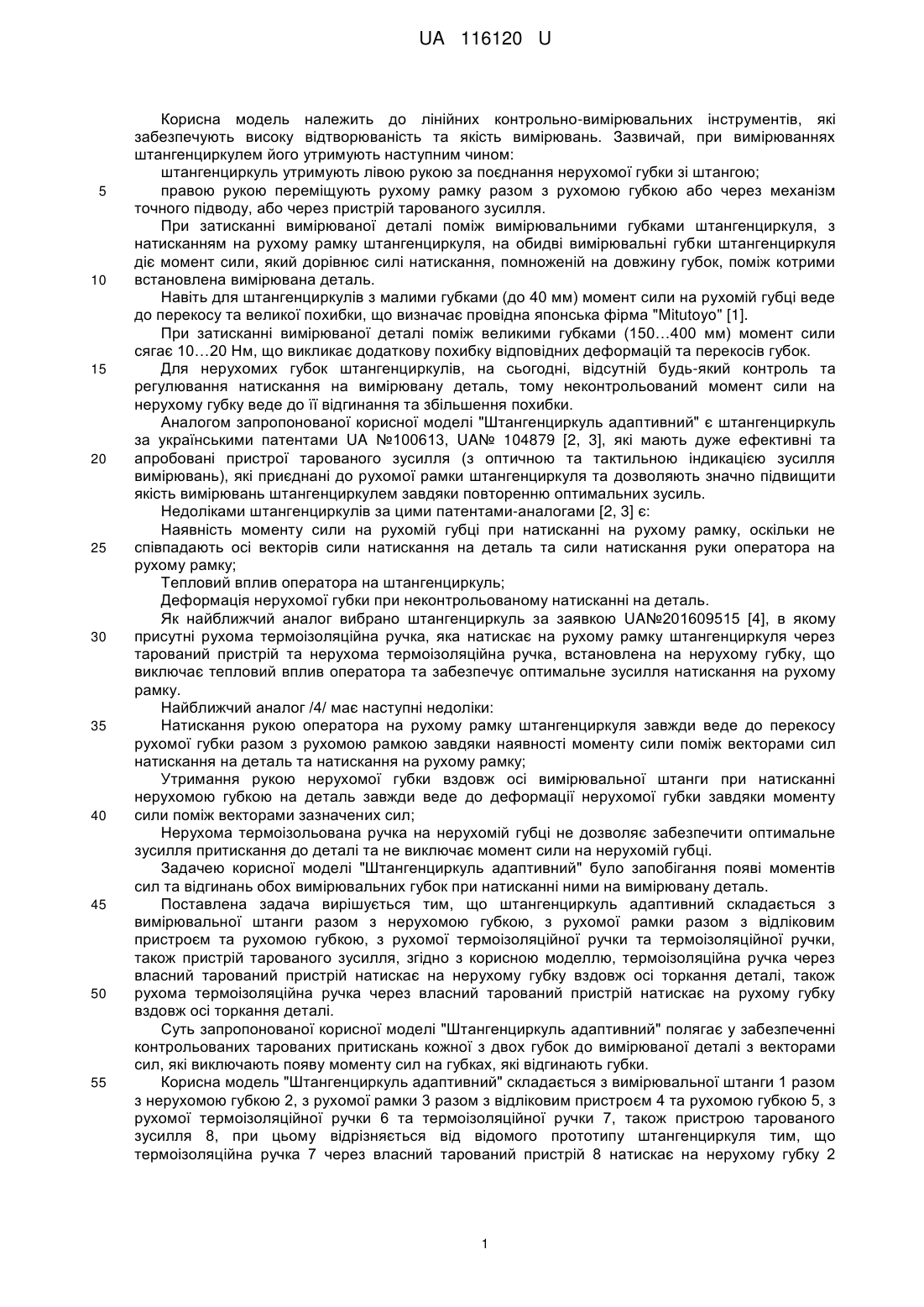
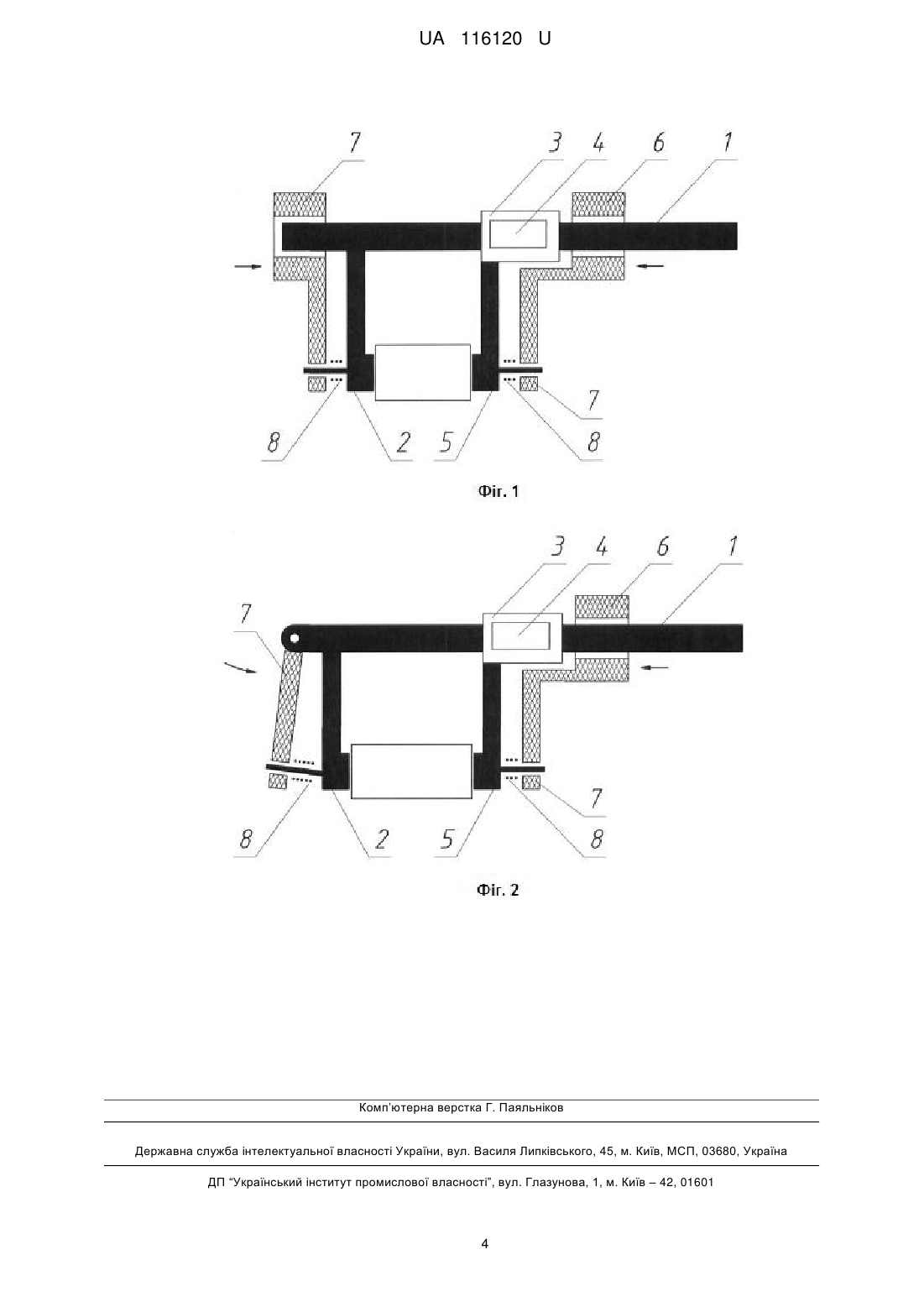
Реферат: UA 116120 U UA 116120 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до лінійних контрольно-вимірювальних інструментів, які забезпечують високу відтворюваність та якість вимірювань. Зазвичай, при вимірюваннях штангенциркулем його утримують наступним чином: штангенциркуль утримують лівою рукою за поєднання нерухомої губки зі штангою; правою рукою переміщують рухому рамку разом з рухомою губкою або через механізм точного підводу, або через пристрій тарованого зусилля. При затисканні вимірюваної деталі поміж вимірювальними губками штангенциркуля, з натисканням на рухому рамку штангенциркуля, на обидві вимірювальні губки штангенциркуля діє момент сили, який дорівнює силі натискання, помноженій на довжину губок, поміж котрими встановлена вимірювана деталь. Навіть для штангенциркулів з малими губками (до 40 мм) момент сили на рухомій губці веде до перекосу та великої похибки, що визначає провідна японська фірма "Mitutoyo" [1]. При затисканні вимірюваної деталі поміж великими губками (150…400 мм) момент сили сягає 10…20 Нм, що викликає додаткову похибку відповідних деформацій та перекосів губок. Для нерухомих губок штангенциркулів, на сьогодні, відсутній будь-який контроль та регулювання натискання на вимірювану деталь, тому неконтрольований момент сили на нерухому губку веде до її відгинання та збільшення похибки. Аналогом запропонованої корисної моделі "Штангенциркуль адаптивний" є штангенциркуль за українськими патентами UA №100613, UA№ 104879 [2, 3], які мають дуже ефективні та апробовані пристрої тарованого зусилля (з оптичною та тактильною індикацією зусилля вимірювань), які приєднані до рухомої рамки штангенциркуля та дозволяють значно підвищити якість вимірювань штангенциркулем завдяки повторенню оптимальних зусиль. Недоліками штангенциркулів за цими патентами-аналогами [2, 3] є: Наявність моменту сили на рухомій губці при натисканні на рухому рамку, оскільки не співпадають осі векторів сили натискання на деталь та сили натискання руки оператора на рухому рамку; Тепловий вплив оператора на штангенциркуль; Деформація нерухомої губки при неконтрольованому натисканні на деталь. Як найближчий аналог вибрано штангенциркуль за заявкою UA№201609515 [4], в якому присутні рухома термоізоляційна ручка, яка натискає на рухому рамку штангенциркуля через тарований пристрій та нерухома термоізоляційна ручка, встановлена на нерухому губку, що виключає тепловий вплив оператора та забезпечує оптимальне зусилля натискання на рухому рамку. Найближчий аналог /4/ має наступні недоліки: Натискання рукою оператора на рухому рамку штангенциркуля завжди веде до перекосу рухомої губки разом з рухомою рамкою завдяки наявності моменту сили поміж векторами сил натискання на деталь та натискання на рухому рамку; Утримання рукою нерухомої губки вздовж осі вимірювальної штанги при натисканні нерухомою губкою на деталь завжди веде до деформації нерухомої губки завдяки моменту сили поміж векторами зазначених сил; Нерухома термоізольована ручка на нерухомій губці не дозволяє забезпечити оптимальне зусилля притискання до деталі та не виключає момент сили на нерухомій губці. Задачею корисної моделі "Штангенциркуль адаптивний" було запобігання появі моментів сил та відгинань обох вимірювальних губок при натисканні ними на вимірювану деталь. Поставлена задача вирішується тим, що штангенциркуль адаптивний складається з вимірювальної штанги разом з нерухомою губкою, з рухомої рамки разом з відліковим пристроєм та рухомою губкою, з рухомої термоізоляційної ручки та термоізоляційної ручки, також пристрій тарованого зусилля, згідно з корисною моделлю, термоізоляційна ручка через власний тарований пристрій натискає на нерухому губку вздовж осі торкання деталі, також рухома термоізоляційна ручка через власний тарований пристрій натискає на рухому губку вздовж осі торкання деталі. Суть запропонованої корисної моделі "Штангенциркуль адаптивний" полягає у забезпеченні контрольованих тарованих притискань кожної з двох губок до вимірюваної деталі з векторами сил, які виключають появу моменту сил на губках, які відгинають губки. Корисна модель "Штангенциркуль адаптивний" складається з вимірювальної штанги 1 разом з нерухомою губкою 2, з рухомої рамки 3 разом з відліковим пристроєм 4 та рухомою губкою 5, з рухомої термоізоляційної ручки 6 та термоізоляційної ручки 7, також пристрою тарованого зусилля 8, при цьому відрізняється від відомого прототипу штангенциркуля тим, що термоізоляційна ручка 7 через власний тарований пристрій 8 натискає на нерухому губку 2 1 UA 116120 U 5 10 15 20 25 30 35 40 45 50 55 вздовж осі торкання деталі, також рухома термоізоляційна ручка 6 через власний тарований пристрій 8 натискає на рухому губку 5 вздовж осі торкання деталі. Корисна модель "Штангенциркуль адаптивний" схематично зображена на Фіг. 1 та Фіг. 2. Вимірювальна штанга може бути з інкрементною шкалою (для цифрового відліку) або з ноніусною шкалою (для аналогового відліку) та має конструктивні особливості: На Фіг. 1 вимірювальна штанга 1 має прямолінійну частину, вздовж якої подовжньо рухається термоізоляційна ручка 7, яка натискає через відповідний тарований пристрій 8 на нерухому губку 2 навпроти місця торкання з вимірюваною деталлю; На Фіг. 2 вимірювальна штанга 1 має шарнір для повертання термоізоляційної ручки 7, яка натискає через відповідний тарований пристрій 8 на протилежну сторону нерухомої губки 2 навпроти місця торкання з вимірюваною деталлю. Рухома рамка 3 та відліковий пристрій 4 (цифровий або аналоговий) є звичайними. Рухома термоізоляційна ручка 6 виконана у вигляді термоізоляційної труби з кронштейном регульованої довжини для забезпечення натискання через відповідний тарований пристрій 8 на протилежну сторону рухомої губки 5, навпроти місця торкання з вимірюваною деталлю, див. Фіг. 1 та Фіг. 2. Термоізоляційна ручка 7 може бути виконана наступним чином: у вигляді термоізоляційної труби з кронштейном регульованої довжини для забезпечення натискання через відповідний тарований пристрій 8 на протилежну сторону нерухомої губки 2, навпроти місця торкання з вимірюваною деталлю, при цьому термоізоляційна труба переміщується вздовж вимірювальної штанги 1, див. Фіг. 1; у вигляді поворотного термоізоляційного важеля, який одним кінцем встановлений на шарнірі на вимірювальній штанзі 1, а другим кінцем натискає через відповідний тарований пристрій 8 на протилежну сторону нерухомої губки 2, навпроти вимірюваної деталі, при цьому важіль переміщується у площині нерухомої губки 2. Пристрої тарованого зусилля 8, при натисканні на них рухомої термоізоляційної ручки 6 також термоізоляційної ручки 7, забезпечують оптимальні зусилля вимірювань (зі світовою або тактильною індикацією) відповідно до відомих патентів-аналогів [2, 3]. Запропонована корисна модель "Штангенциркуль адаптивний" не потребує додаткових знань та навичок користувача, найбільш доцільна для штангенциркулів з великими губками. Вимірювання деталей за допомогою корисної моделі "Штангенциркуль адаптивний" виконують з наступним чином: 1) Перед початком роботи включають цифровий відліковий пристрій 4 та зводять губки 2 та 5 до початкового торкання, для чого натискають правою рукою на рухому термоізоляційну ручку 6, а лівою рукою утримують термоізоляційну ручку 7 доти, поки обидва пристрої тарованого зусилля 8 не забезпечать оптимальне зусилля зведення обох губок 15…50 Н для губок довжиною 100…1000 мм; 2) Після початкового торкання та досягнення поміж губками 2 та 5 необхідного оптимального зусилля, на відліковому пристрої 3 встановлюють "0", після чого корисна модель "Штангенциркуль адаптивний" готова до поточних вимірювань; 3) Вимірювання починають притисканням нерухомої губки 2 до вимірюваної деталі: - за допомогою термоізоляційної ручки 7 натискають на відповідне місце на нерухомій губці 2, яке має бути навпроти з місцем торкання нерухомою губкою 2 вимірюваної деталі, для виключення деформації нерухомої губки; - при подальшому натисканні на термоізоляційну ручку 7 індикатор (світловий або тактильний відповідно до відомих патентів [2,3]) тарованого пристрою 8 сигналізує про досягнення оптимального зусилля притискання нерухомої губки 2 до вимірюваної деталі (момент сили на нерухомій губці не виникає, оскільки вектори сил натискання на нерухому губку 2 та контакту з деталлю співвісні); - після цього припиняють подальше натискання на термоізоляційну ручку 7 та підтримують оптимальне зусилля притискання нерухомої губки 2 до вимірюваної деталі; 4) Після нерухомої губки 2 до деталі притискають рухому термоізоляційну ручку 6: - за допомогою рухомої термоізоляційної ручки 6 натискають на відповідне місце на рухомій губці 5, яке має бути навпроти місця торкання рухомою губкою 5 вимірюваної деталі для виключення перекосу рухомої губки 5 разом з рухомою рамкою 3; - при подальшому натисканні на рухому термоізоляційну ручку 6, індикатор (світовий або тактильний відповідно до відомих патентів [2, 3]) сигналізує про досягнення оптимального зусилля притискання рухомої губки 5 до вимірюваної деталі (момент сили на рухому губку не виникає, оскільки вектори сил натискання на рухому губку 5 та контакту з деталлю співвісні; 2 UA 116120 U 5 10 - після цього припиняють подальше натискання на рухому термоізоляційну ручку 6 та підтримують оптимальне зусилля притискання рухомої губки 5 до вимірюваної деталі; 5) Зчитують показники вимірювань з відлікового пристрою 4, контролюючи забезпечення оптимальних зусиль натискання термоізоляційною ручкою 7 на нерухому губку 2 та рухомою термоізоляційною ручкою 6 на рухому губку 5; 6) При вимірюваннях інших деталей повторюють переходи 3…5; 7) Для вимірювань після транспортування та складування повторюють переходи 1…5. Було виконано техніко-метрологічний аналіз та порівняння запропонованої корисної моделі "Штангенциркуль адаптивний" з кращим сучасним серійним штангенциркулем Sylvac (Швейцарія) (5) діапазону 0…1000 мм з довжиною губок 400 мм та з пружним елементом. Таблиця Значення показників та функцій Корисна модель Штангенциркуль UL4 "Штангенциркуль фірми Sylvac адаптивний» Дві Немає 2 1 Немає 8…12 40 120 Показники штангенциркулів цифрових 0….1000 / 0,01 мм з довжиною губок 400 мм та з тарованим пристроєм Наявність термоізоляційних ручок, шт. Кількість тарованих пристроїв, шт. Момент сили на губках, Нм Похибка вимірювань, мкм 15 20 Проведений у табл. порівняльний аналіз запропонованої корисної моделі "Штангенциркуль адаптивний" та швейцарського інноваційного штангенциркуля UL4 фірми Sylvac [5] підтверджує можливість практичної реалізації та переваги запропонованої корисної моделі "Штангенциркуль адаптивний". Запропонована корисна модель "Штангенциркуль адаптивний" зменшує у 3…30 рази додаткову похибку від деформації нерухомої губки та перекосу рухомої рамки. Джерела інформації: 1. "Mitutoyo. Messtechnik kompakt". P. 17 2. Патент UA№ 100613 "Штангенциркуль тарований» 3. Патент UA№ 104879 "Штангенциркуль тарований» 4. Заявка UA№201609515 "Штангенциркуль адаптивний» 5. "Catalogue Sylvac Edition 8» 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 Штангенциркуль адаптивний, що складається з вимірювальної штанги разом з нерухомою губкою, з рухомої рамки разом з відліковим пристроєм та рухомою губкою, з рухомої термоізоляційної ручки та термоізоляційної ручки, також пристрою тарованого зусилля, який відрізняється тим, що термоізоляційна ручка через власний тарований пристрій натискає на нерухому губку вздовж осі торкання деталі, також рухома термоізоляційна ручка через власний тарований пристрій натискає на рухому губку вздовж осі торкання деталі. 3 UA 116120 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 3/20
Мітки: штангенциркуль, адаптивний
Код посилання
<a href="https://ua.patents.su/6-116120-shtangencirkul-adaptivnijj.html" target="_blank" rel="follow" title="База патентів України">Штангенциркуль адаптивний</a>
Штангенциркуль адаптивний

Номер патенту: 112195
Опубліковано: 12.12.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
Штангенциркуль адаптивний, що містить вимірювальну штангу, поєднану через фланці та подовжувачі з нерухомою губкою, також рухому рамку з відліковим пристроєм та рухому губку, який відрізняється тим, що вимірювальна штанга та подовжувачі встановлені на регульовані опори, мають переставні приціли, з вільного краю вимірювальної штанги встановлена горизонтальна зорова труба, а обидві губки мають вертикальні ампули, що встановлені на двох...
Штангенциркуль адаптивний
Номер патенту: 114495
Опубліковано: 10.03.2017
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
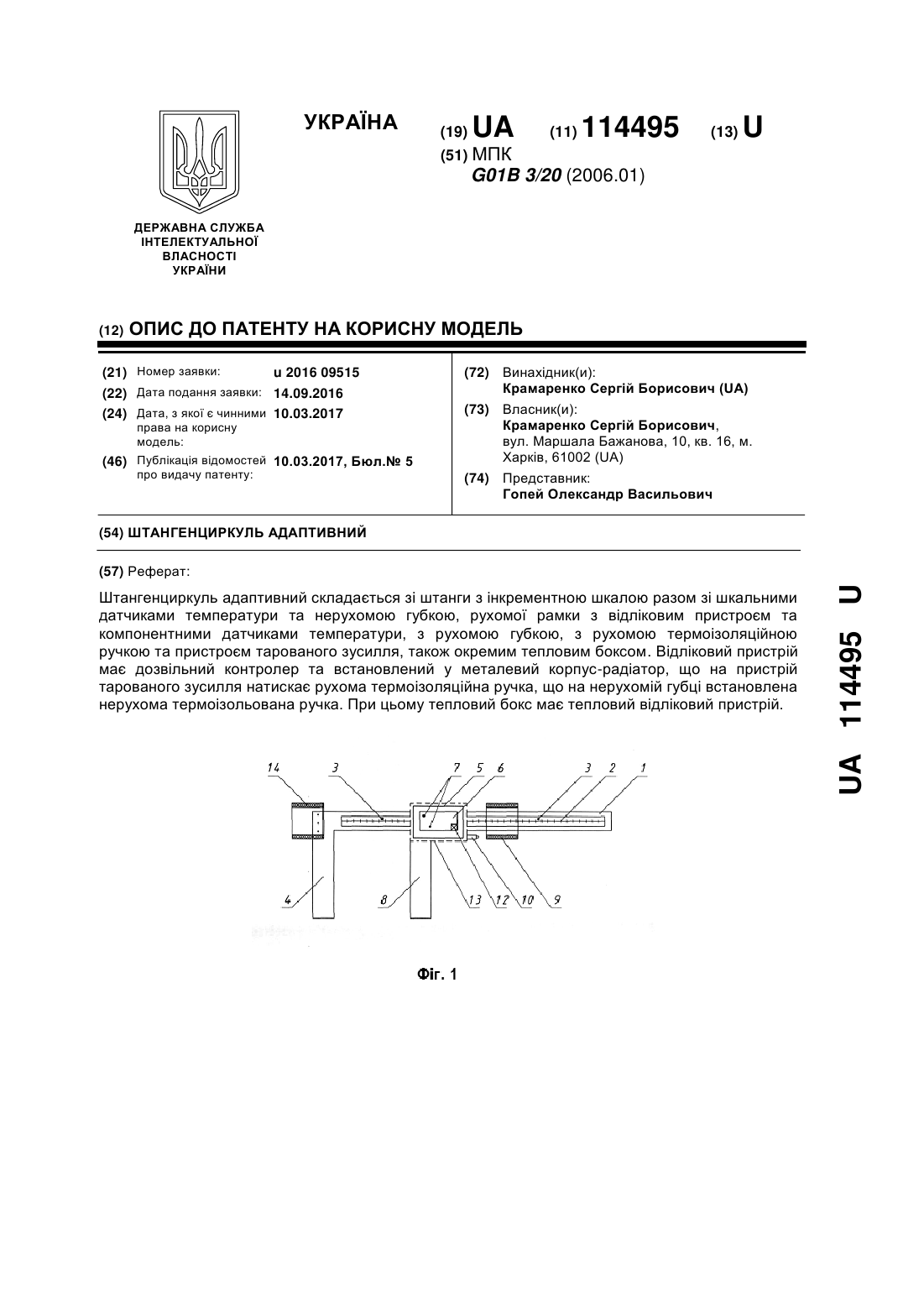
Штангенциркуль адаптивний, що складається зі штанги з інкрементною шкалою разом зі шкальними датчиками температури та нерухомою губкою, рухомої рамки з відліковим пристроєм та компонентними датчиками температури, з рухомою губкою, з рухомою термоізоляційною ручкою та пристроєм тарованого зусилля, також окремим тепловим боксом, який відрізняється, що відліковий пристрій має дозвільний контролер та встановлений у металевий корпус-радіатор, що...
Штангенциркуль адаптивний
Номер патенту: 113164
Опубліковано: 10.01.2017
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
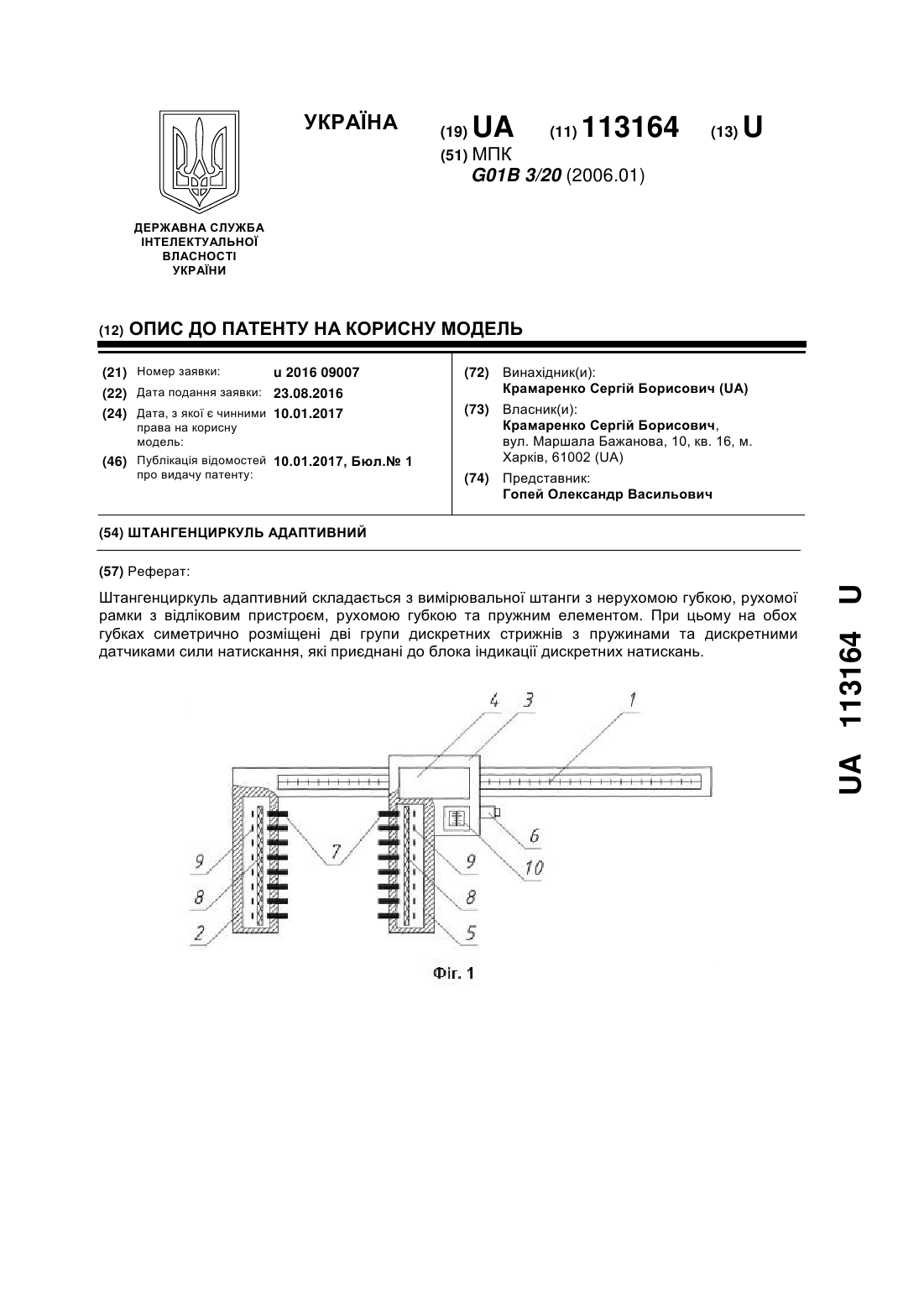
Штангенциркуль адаптивний, що складається з вимірювальної штанги з нерухомою губкою, рухомої рамки з відліковим пристроєм, рухомою губкою та пружним елементом, який відрізняється тим, що на обох губках симетрично розміщені дві групи дискретних стрижнів з пружинами та дискретними датчиками сили натискання, які приєднані до блока індикації дискретних натискань.
Штангенциркуль адаптивний
Номер патенту: 111194
Опубліковано: 10.11.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 21/32, G01B 3/20
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
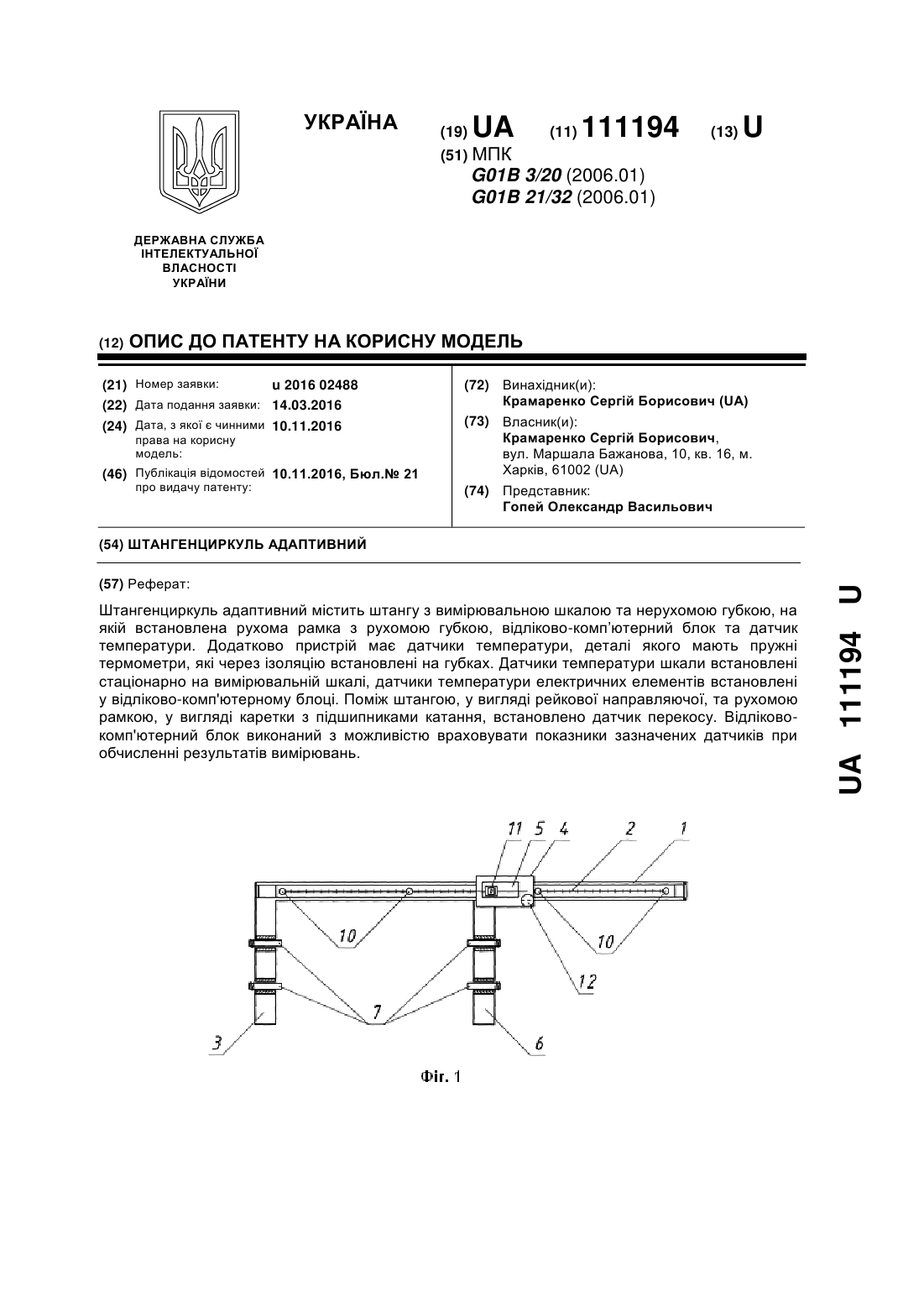
Штангенциркуль адаптивний, що містить штангу з вимірювальною шкалою та нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою, відліково-комп’ютерний блок та датчик температури, який відрізняється тим, що має датчики температури, деталі якого мають пружні термометри, які через ізоляцію встановлені на губках, датчики температури шкали встановлені стаціонарно на вимірювальній шкалі, датчики температури електричних елементів...
Штангенциркуль адаптивний
Номер патенту: 112361
Опубліковано: 12.12.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
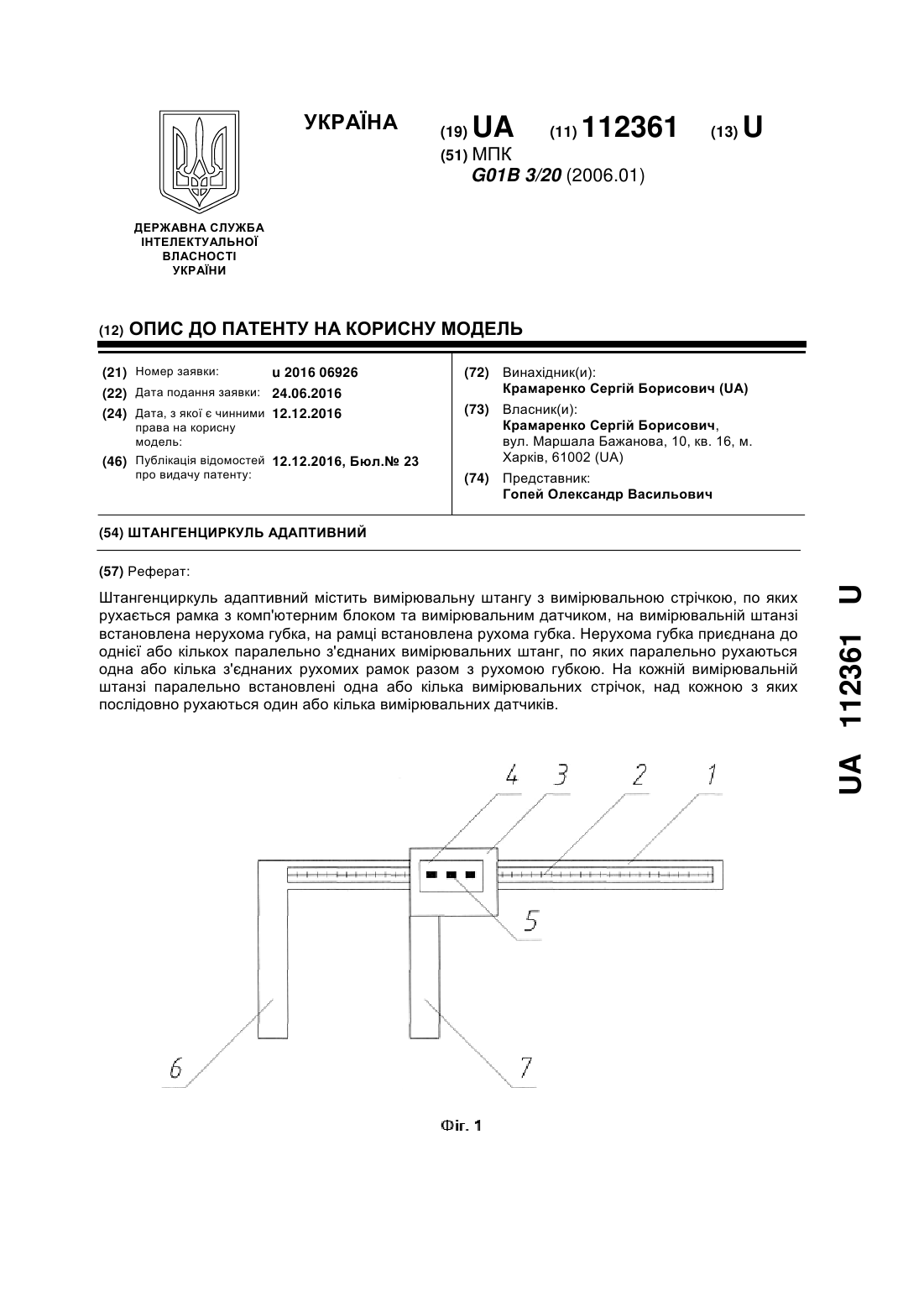
Штангенциркуль адаптивний, що складається з вимірювальної штанги з вимірювальною стрічкою, по яких рухається рамка з комп'ютерним блоком та вимірювальним датчиком, на вимірювальній штанзі встановлена нерухома губка, на рамці встановлена рухома губка, який відрізняється тим, що нерухома губка приєднана до однієї або кількох паралельно з'єднаних вимірювальних штанг, по яких паралельно рухаються одна або кілька з'єднаних рухомих рамок разом з...
Попередній патент: Спосіб визначення місцезнаходження об’єкта
Наступний патент: Система кондиціювання з рекуперацією видалюваного повітря
Випадковий патент: Телеоператор