Система керування та контролю параметрів газотурбінного двигуна

Формула / Реферат
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, який з'єднано з блоком керування переладнанням блоком формування відмови, блоком n –входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднано з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, першим блоком елементів "І" та елементом "АБО", вихід якого з'єднано з лічильником та елементом "І" другий вхід якого з'єднано з виходом лічильника, а другий та третій входи лічильника безпосередньо та через елемент "НІ" з'єднані з програмним блоком, дванадцятий вихід якого через блоки змінення мінімального та максимального рівня ладнання та блок елементів "АБО" з'єднано з блоком сигналізаторів, десятий вихід програмного блока з'єднано з блоком керування переладнанням, виходи якого безпосередньо з'єднані з блоками змінення мінімального та максимального рівня ладнання та першим блоком елементів "І", останній вхід якого з'єднано з виходом елемента "НІ" і одним з входів блока, зв'язку з виконавчими елементами, вихід першого блока, елементів "І" через блок формування відмови з'єднано з блоком n - входових елементів "І" та елементів “АБО”, решта входів якого з’єднана з виходами блока контролю датчика та блока, відмови обертів, який по тому ж ланцюгу з'єднано з входом другого блока елементів "І", вхідний ланцюг системи, від датчика обертів, з'єднано з входами блока, контролю датчика та блока, вимірювання обертів, перший вихід якого з'єднано з блоком сигналів дозволу, блоком відмови обертів та другим блоком елементів "І", а другий - з програмним блоком, шостий вихід якого через задатчик контрольної частоти з'єднано з блоком вимірювання обертів, решта входів якого з'єднана з блоком сигналів дозволу, блоком контролю датчика та програмним блоком, решта виходів якого з'єднана з блоком n - входових елементів "І", блоком формування відмови, другим блоком елементів "І", блоком відмови обертів, блоком сигналів дозволу та блоком зв'язку з виконавчими елементами, останній вхід якого з'єднано з виходом другого блока елементів "І", а вихід елемента "І" та другий вихід блока зв'язку з виконавчими елементами є виходами системи, третій вхід блока сигналізаторів є другим входом системи, а останній вхід другого блока елементів "І" з'єднано з другим виходом блока сигналів дозволу, яка відрізняється тим, що вона додатково містить комутатор, аналого - цифровий перетворювач, шинний формувач, блок пам'яті, операційний блок, блок запуску, другий блок сигналів дозволу та перетворювач частота - код, вхід якого з'єднано з додатковим виходом блока вимірювання обертів, вхід комутатора з'єднано з додатковім виходом блока сигналізаторів, а його вихід з’єднано з аналого - цифровим перетворювачем, перший і другий входи шинного формувача з'єднані з виходами блока контролю та блока контролю датчика відповідно, перший вихід операційного блока, з'єднано з другим входом комутатора, аналого - цифровий перетворювач, шинний формувач, перетворювач частота - код та блок пам'яті входами – виходами з'єднані з операційним блоком, а останній вихід операційного блока є третім виходом системи, вхід блока, контролю з'єднано з другим додатковим виходом блока сигналізаторів, вихід якого з'єднано з першими входами блока - запуску та другого блока сигналів дозволу, вихід якого через блок запуску з'єднане з другим входом програмного блока, останній вихід якого, в свою чергу, з'єднано з другим входом другого блока сигналів дозволу, останній вхід якого з'єднано з додатковим виходом блоки, формувачів установки, а другий вихід другого блока сигналів дозволу з'єднано з останнім входом блока n - входових елементів "І".
Текст
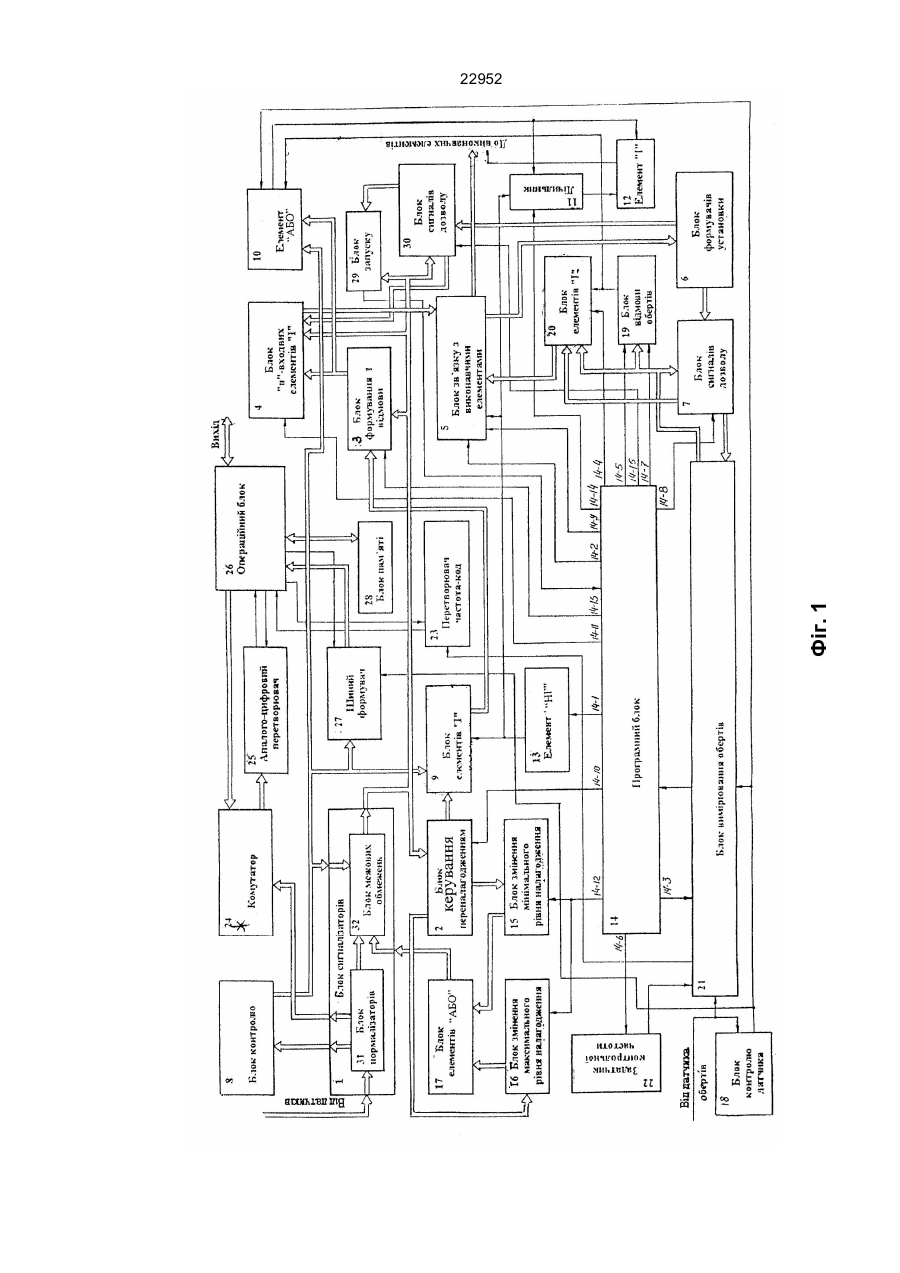
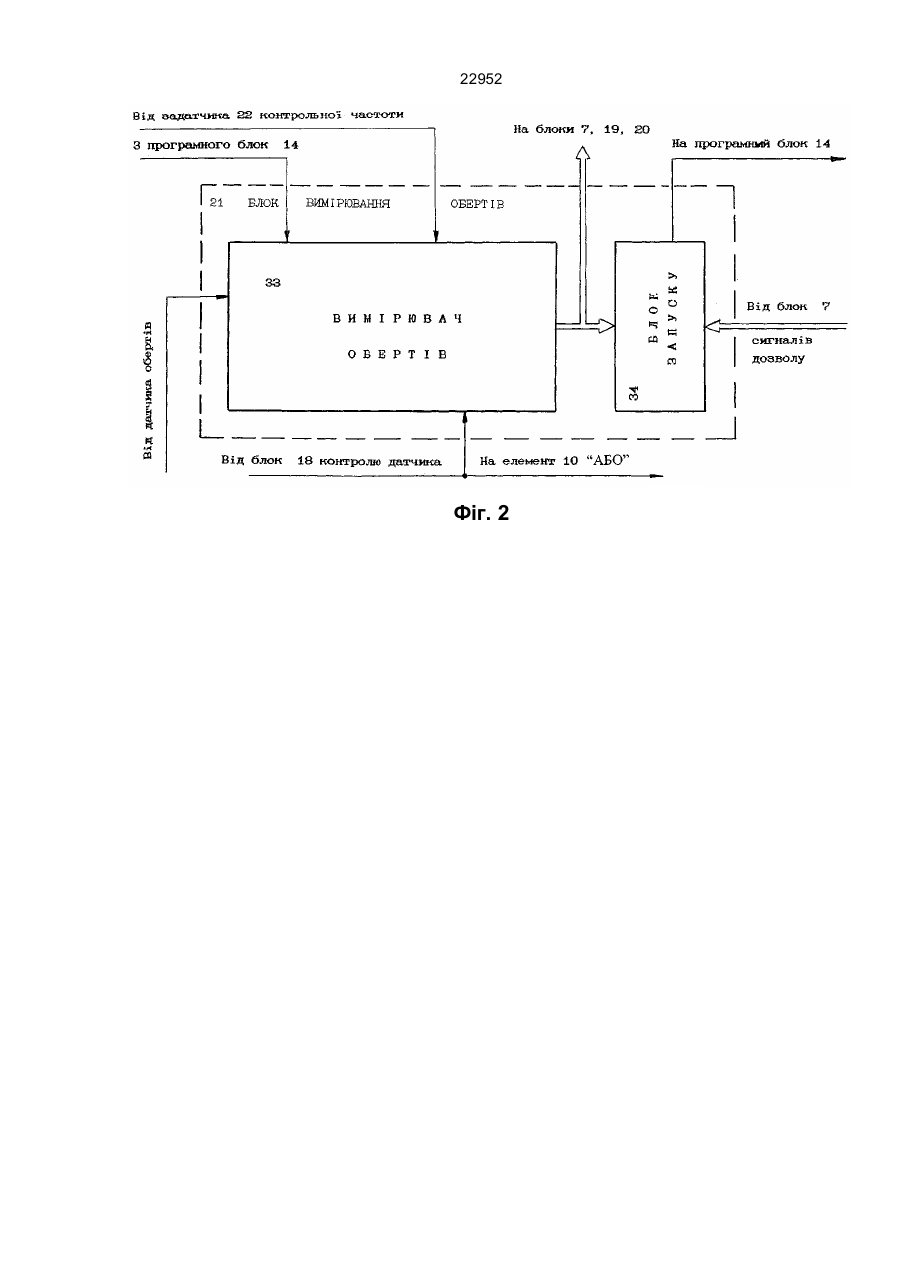
22952 Винахід стосується систем автоматичного керування об'єктами, зокрема, систем автоматич-ного керування газотурбінними двигунами (ГТД) літальних апаратів. Удосконалення та експлуатація за технічним станом авіаційних двигунів неможлива без поширеного застосування систем керування та конт-ролю до яких ставляться наступні головні вимоги: - система повинна володіти функціональними можливостями, достатніми для рішення поставленого завдання, наприклад, завдання керування та реєстрації параметрів в процесі польоту літального апарату; - система повинна володіти достатньою надійністю функціонування (перешкодостійкістю) в процесі роботи газотурбінного двигуна. Відомі системи: - "Система управління газотурбінним двигуном", яка містить в собі датчики, блок сигна-лізаторів, блок схем "І", запам'ятовуючий блок, програмний блок, тригер, блок вимірювання обе-ртів, блок змінення рівня налагодження, вико-навчі елементи та "n"-входову схему "І" (а.с. ко-лишнього СРСР № 677559, кл. F02С9/02). - "Система управління газотурбінним двигу-ном", яка містить в собі датчики, блок автомати-чного керування та контролю, схеми "І", програ-мний блок, реєстратор, схеми "АБО" перемикаю-чий елемент, блок стимулюючих сигналів, кому-татор, запам'ятовуючий блок та блок формуван-ня сигналу відмови (а.с. колишнього СРСР № 726360, кл. F02С9/02). - "Система контролю параметрів силової уста-новки літального апарату", яка містить в собі да-тчик тиску, сигналізатор справності ланцюгу дат-чика, датчик обертів, вимірювач обертів, блок переналагодження, сигналізатор обертів, сигналі-затор тиску, генератор тактових імпульсів та лі-чильники імпульсів (а.с. колишнього СРСР № 1550985, кл. F02С9/00). Вищезазначені системи мають обмежені функціональні можливості (відсутність реєстрації параметрів в процесі роботи газотурбінного двигуна) та недостатню надійність функціонування (недостатню перешкодостійкість) через відсутність самоконтролю при видачі команд межових значень параметрів. Найближчою за технічною суттю та досяга-ємому ефекту по відношенню до даного технічного рішення є відома "Система управління газотурбінним двигуном" (дивися патент України № 2101, кл. F02C9/28), яка містить в собі блок сигналізаторів з'єднаний з блоком управління перенала-годженням, блоком формування відмов, блоком "n"-входових (тривходових) елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, блоком елементів "І" та елементом "АБО" вихід якого з'єднана лічильником та елементом "І", другий вхід якого з'єднано з виходом лічильника, другий та третій входи якого безпосередньо та через елемент "НІ" з'єднані з програмним блоком, дванадцятий вихід якого через блоки змінення min та max рівня налагодження і блок елементів "АБО" з'єднано з блоком сигналізаторів, десятий вихід програмного блока з'єднано з блоком керування переналагодженням, виходи якого безпосередньо з'єднані з блоками змінення min та max рівня налагодження і блоком елементів "І", останній вхід якого з'єднаний з виходом елемента "НІ”, вихід блока елементів "І" через блок формування відмови з'єднаний з блоком "n"входових елементів "І" та елементом “АБО", решта входів якого з'єднана з виходами блока контролю датчика та блока відмови обертів, який по цьому ланцюгу з'єднано з входом другого блока елементів "І", вхідний ланцюг системи, від датчика обертів, з'єднаний з входом блока контролю датчика та блока вимірювання обертів, перший вихід якого з'єднано з блоком сигналів дозволу, блоком відмови обертів та другим блоком елементів "І", а другий - з програмним блоком, шостий вихід якого через задатчик контрольної частоти з'єднано з блоком вимірювання обертів, решта входів якого з'єднана з блоком сигналів дозволу та програмним блоком, решта виходів якого з'єднана з блоком "n"вхо-дових елементів "І", блоком формування відмови, другим блоком елементів "І", блоком відмови обертів, блоком сигналів дозволу та блоком зв'язку з виконавчими елементами, останній вхід якого з'єд-нано з виходом другого блока елементів "І", вихід елемента "І" та другий вихід блока зв'язку з виконавчими елементами є виходами системи, а третій вхід блока сигналізаторів є другим входом системи. Вказана система має наступні недоліки: - відсутній безперервний запис параметрів, які характеризують стан газотурбінного двигуна на всіх режимах його роботи, що обмежує галузь застосування та виключає його експлуатацію за технічним станом; - відсутня поканальна реєстрація сигналів порушення ланцюгів датчиків газотурбінного двигуна, що перешкоджає його експлуатації та збільшує час пошуку відмов в ланцюгах датчиків газотурбінного двигуна за допомогою перевірочної апаратури, і як наслідок не виключає бездії авіаційної техніки; - недостатня надійність та перешкодостійкість системи внаслідок відсутності автоматичного контролю функціонування тракту сигналізаторів при виданні останніми сигналів перебільшення межового значення параметру двигуна; - обмежені функціональні можливості та галузь застосування системи внаслідок вищезазначених недоліків. Винахід направлено на створення системи керування та контролю параметрів газотурбінного двигуна, який має: - безперервний запис параметрів газотурбінного двигуна, що дасть можливість визначити фізичні значення параметрів та їх змінення в залежності від режиму його роботи та забезпечення надійної експлуатації газотурбінного двигуна за технічним станом, що дозволить, в свою чергу, визначити по якому конкретно параметру двигун вийшов на аварійний режим роботи; 22952 - безперервну реєстрацію сигналів порушення ланцюгів датчиків газотурбінного двигуна, що дозволить на етапі дешифрування польотної інформації зареєстрованої системою, визначити в якому конкретно датчику виникло порушення ланцюга та зменшити час пошуку відмов в ланцюгах датчиків за допомогою перевірочної апаратури в період експлуатації двигуна; - автоматичним контролем функціонування тракту сигналізаторів при видачі останнім сигналів які свідчать про досягнення двигуном межових значень параметрів. Задачею винаходу є підвищення надійності та перешкодостійкості, розширення функціональних можливостей та галузі застосування системи. Задача вирішується тим, що в відому систему що має блок сигналізаторів з'єднаний з блоком управління переналагодженням, блоком формува-ння відмови, блоком "n"-входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднані блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, блоком елементів "І" та елементом "АБО”, вихід якого з'єднано з лічильником та елементом "І", другий вхід якого з’єднано з виходом лічильника, а другий та третій входи якого безпосередньо та через елемент "НІ" з'єднані з програмним блоком, дванадцятий вихід якого через блоки змінення min та max рівня налагодження та блок елементів "АБО" з'єднано з блоком сигналізаторів, десятий вихід програмного блока з'єднано з блоком керування переналагодженням, виходи якого безпосередньо з'єднані з блоками змінення min та max рівня налагодження та блоком елементів "І", останній вхід якого з'єднано з виходом елемента "НІ" і одним з входів блока зв'язку з виконавчими елементами, вихід блока елементів "І" через блок формування відмови з'єднань з блоком "n"-входових елементів "І" та елементів "ABO”, решта входів якого з'єднана з виходами блока контролю датчика та блока відмови обертів, який по тому ж ланцюгу з’єднань з входом другого блока елементів "І", вхідний ланцюг системи, від датчика обертів, з'єднано з входом блока контролю датчика та блока вимірювання обертів перший вихід якого з'єднано з блоком сигналів дозволу, блоком відмови обертів та другим блоком елементів "І", а другий - з програмним блоком, шостий вихід якого через задатчик контрольної частоти з'єднано з блоком вимірювання обертів, решта входів якого з'єднана з блоком сигналів дозволу, блоком контролю датчика та програмним блоком, решта виходів якого з'єднана з блоком "n"входових елементів "І", блоком формування відмови, другим блоком елементів "І", блоком відмови обертів, блоком сигналів дозволу, блоком зв'язку з виконавчими елементами, останній вхід якого з'єднано з виходом другого блока елементів "І", а останній вхід другого блока елементів "І" з'єднано з другим виходом блока сигналів дозволу, вихід елемента "І" та другий вихід блока зв'язку з виконавчими елементами є виходами системи, а третій вхід блока сигналізаторів є другим входом системи, додатково впроваджені комутатор, аналого-цифровий перетворювач, шинний формувач, блок пам'яті, операційний блок, блок запуску, другий блок сигналів дозволу та перетворювач частота-код, вхід якого з'єднано з додатковим виходом блока вимірювання обертів, вхід комутатора з'єднано з додатковим виходом блока сигналізаторів, а вихід - з аналого-цифровим перетворювачем, перший і другий входи шинного формувача, з'єднані з виходами блока контролю та блока контролю датчика відповідно, перший вихід операційного блока з'єднано з другим входом комутатора, аналого-цифровий перетворювач, шинний формувач, перетворювач частота-код та блок пам'яті з'єднані входами-виходами з операційним блоком, а остан-ній вихід операційного блока є третім виходом системи, вхід блока контролю з’єднань з другим додатковим виходом блоку сигналізаторів, вихід якого з'єднано з першими входами блока запуску та другого блока сигналів дозволу, вихід якого, в свою чергу, через блок запуску з'єднано з другим входом програмного блока, останній вихід якого з'єднано з другим входом другого блока сигналів дозволу, останній вхід другого блока сигналів дозволу з'єднань з додатковим виходом формувачів установки, а другий вихід другого блока сигналів дозволу з'єднано з останнім входом блока "n"-входових елементів "І". Введення в систему додаткових ознак, а саме: - комутатора, аналого-цифрового перетворювача, шинного формувача, перетворювача частота-код, операційного блока, блока пам'яті, блока запуску, другого блока сигналів дозволу та наявність додаткових виходів, які мають блоки сигналізаторів, вимірювача обертів та формувачів установки дозволяє забезпечити; - безперервний запис аналогових сигналів (па-раметрів двигуна), які характеризують фізичний стан газотурбінного двигуна з виходу блока сигналізаторів та перетворювача частота-код, що дозволить визначити фізичні значення параметрів та їх змінення в залежності від режиму його роботи по закінченню виконання польотів чи наземних гонок двигунів для забезпечення надійної їх експлуатації за технічним станом; - безперервний запис дискретних сигналів порушення ланцюгів датчиків газотурбінного двигуна з виходу блока контролю та блока контролю датчика, що дозволить на етапі дешифрування польотних даних, зареєстрованих системою, визначити в якому конкретно датчику виникло порушення ланцюга та скоротити час пошуку відмов в ланцюгах датчиків за допомогою перевірочної апаратури в період експлуатації двигуна; - виключити помилкову видачу команд з блока сигналізаторів на виконавчі елементи за рахунок його автоматичного контролю функціонування при видачі сигналу про досягнення параметром межового значення, що дозволить забезпечити високу надійність та перешкодостійкість системи та виключити аварійні ситуації на борту літального апарата. Як бачимо з вищезгаданого, технічне рішення володіє суттєвими ознаками, які дозволяють підвищити надійність та перешкодостійкість системи, поширити функціональні можливості та галузь застосування системи, що в свою чергу дозволить виключити аварійні ситуації в процесі експлуатації газотурбінного двигуна за технічним станом, забезпечити надійну його експлуатацію та скоротити час на усунення відмов в 22952 обладнанні двигуна та ланцюгах датчиків, отже підвищити надійність та знизити вартість експлуатації газотурбінного двигуна, а також скоротити бездію авіаційної техніки. Принцип роботи системи пояснюється кресленнями де: фіг. 1 - структурна схема системи; фіг. 2 - приклад конкретного виповнення блока, вимірювання обертів. Система містить блок 1 сигналізаторів, блок 2 керування переладнання, блок 3 формування відмови, блок 4 "n"-входових елементів "І", блок 5 зв'язку з виконавчими елементами, блок 6 формувачів установки, блок 7 сигналів дозволу, блок 8 контролю, перший блок 9 елементів "І", елемент 10 "АБО", лічильник 11, елемент 12 "І", елемент 13 "НІ", програмний блок 14, блок 15 змінення мінімального рівня ладнання, блок 16 змінений максимального рівня ладнання, блок 17 елементів "АБО", блок 18 контролю датчика, блок 19 відмови обертів, другий блок 20 елементів "І", блок 21 вимірювання обертів, задатчик 22 контрольної частоти, перетворювач 23 частота-код, комутатор 24, аналого-цифровий перетворювач 25, операційний блок 26, шинний формувач 27, блок 28 пам'яті, блок 29 запуску, другий блок 30 сигналів дозволу. Блок 1 сигналізаторів містить блок 31 нормалізаторів та блок 32 межових обмежень. Блок 21 містить вимірювач 33 обертів та блок 34 запуску. Блок 1 сигналізаторів першим наявним виходом з'єднань з блоком 2 управління переладнання, блоком 3 формування відмови, блоком 29 запуску, другим блоком 30 сигналів дозволу та блоком 4 "n"-входових елементів "І", вихід якого через блок 5 зв'язку з виконавчими елементами та блок 6 формувачів установки з'єднано з першим блоком 7 сигналів дозволу, вихід блока 8 контролю з'єднано з блоком 1 сигналізаторів, блоком 9 елементів "І", шинним формувачем 27 та елементом 10 "АБО", вихід якого з'єднано з лічильником 11 та елементом 12 "І", другий вхід якого з'єднаноз виходом лічильника 11, другий та третій входи якого безпосередньо та через елемент 13 "НІ" з'єднані з програмним блоком 14, дванадцятий вихід якого через блоки 15 та 16 змінення мінімального та максимального рівня ладнання та блок 17 елементів "АБО" з'єднано з блоком 1 сигналізаторів, десятий вихід програмного блока 14 з'єднано з блоком 2 управління переладнання, виходи якого безпосередньо з'єднані з блоками 15 та 16 змінення мінімального та максимального рівня налагодження та блоком 9 елементів "І", останній вхід якого з'єднай з виходом елемента 13 "НІ" та одним з входом блока 5 зв'язку з виконавчими елементами, вихід блока 9 елементів "І" через блок 3 формування відмови з'єднано з блоком 4 "n"-входових елементів "І" та елементом 10 "АБО", решта входів якого з'єднана з виходами блока 18 контролю датчика та блока 19 відмови обертів, який по тому ж ланцюгу з'єднано з входом другого блока, 20 елементів "І", вхідний ланцюг системи, від датчика обертів, з'єднано з входом блока 18 контролю датчика та блока 21 вимірювання обертів, перший вихід якого з'єднань з блоком 7 сигналів дозволу, блоком 19 відмови обертів та блоком 20 елементів "І", а другий - з програмним блоком 14, шостий вихід якого через задатчик 22 контрольної частоти з'єднань з блоком 21 вимірювання обертів, решта входів якого з'єднана з блоком 7 сигналів дозволу, блоком 18 контролю датчика та програмним блоком 14, решта виходів якого з'єднана з блоком 4 "n"-входових елементів "І", блоком 3 формування відмови, другим блоком 20 елементів "І", блоком 19 відмови обертів, блоком 7 сигналів дозволу, блоком 30 сигналів дозволу та блоком 5 зв'язку з виконавчими елементами, останній вхід якого з'єднано з виходом другого блока 20 елементів "І", останній вхід якого з'єднано з виходом першого блока 7 сигналів дозволу, вихід елемента 12 "І" та другий вихід блока 5 зв'язку з виконавчими елементами є виходами системи, а третій вхід блока 1 сигналізаторів є другим входом системи. Вхід перетворювача 23 частота-код, з'єднані останнім виходом блока 21 вимірювання обертів, вхід комутатора 24 з'єднано з додатковим виходом блока 1 сигналізаторів, а вхід з аналого-цифровим перетворювачем 25, другий вхід шинного формувача 27 з'єднано з виходом блока 18 контролю датчика, перший вихід операційного блока 26 з'єднано з другим входом комутатора 24, аналого-цифровий перетворювач 25, шинний формувач 27, перетворювач 23 частота-код та блок 28 пам'яті з'єднані також входами-виходами з операційним блоком 26, останній вихід операційного блока 26 є третім виходом системи, вхід блоку 8 контролю з'єднаній другим додатковим виходом блока 1 сигналізаторів, другий вихід блока 6 формувачів установки через блок 30 сигналів дозволу та блок 29 запуску з'єднано з останнім входом програмного блока 14. Останній вихід блока 30 сигналів дозволу з'єднано з останнім входом блока 4 "n"-входових елементів "І". Блок 1 сигналізаторів містить блок 31 нормалізаторів, вхід якого з'єднано з другим входом системи (від датчиків), а його вихід - з першим входом блока 32 межових обмежень блока 1, другий та третій входи блока 32 відповідно з'єднані з виходами блока 17 та 8, вихід блока 32 з'єднано з блоками 2, 3, 4, 29 та 30. Останні два виходи блока 31, які є додатковими виходами блока 1, відповідно з'єднані з блоком 8 та комутатором 24. Блок 21 містить вимірювач 33 обертів, входи якого з'єднані з ланцюгом датчик обертів, з блоком 18 контролю датчика, елементом 10 "АБО", програмним блоком 14 та задатчиком 22 контрольної частоти, а вихід з'єднано з входом блока 34 запуску блока 21 вимірювання обертів та з блоками 7, 19 та 20. Другий вхід блоку 34 запуску блока 21 з'єднано з блоком 7, а вихід блока 34 запуску з'єднано з програмним блоком 14. Задатчик 22 контрольної частоти може бути виконаний на базі генераторів синусоїдальних коливань. Блок 29 та блок 34 запуску блока 21 можуть бути показанні як набір елементів "І" та генератора тактових імпульсів чи формувачами імпульсів, які виповнюються на мікросхемі одновибратора. Блоки 7 та 29 сигналів дозволу подані, наприклад, як набір лічильних тригерів. Блок 6 формувачів установки може бути виконаний на базі мікросхем формувачів та одновибраторів. Блок 19 відмови обертів може бути виконаний, наприклад, на базі багатовходового елементи "І" та лічильного тригера. Кількість елементів "І" в блоці 20, та тригерів в блоці 7 відповідають кількості вимірюваних рівней обертів газотурбінного двигуна, а кількість формувачів в блоці 6 відповідає кількості вимірюваних рівней обертів та кількості контрольованих 22952 параметрів блоком 1 сигналізаторів. Перетворювач 23 частота-код, комутатор 24 та аналого-цифровий перетворювач 25 можуть бути виконаний на стандартних мікросхемах. Блок 28 пам'яті може бути виконаний на стандартних мікросхемах пам'яті. Шинний формувач 27 може бути виконаний на стандартних мікросхемах з трьома станами. Операційний блок 26 може бути виконаний на стандартному однокристальному мікропроцесорі. Програмний блок 14 може працювати як за сигналами запуску з блоків 29 запуску та 21 вимірювання обертів, так і за командами - запиту автоматизованої системи контролю (АСК) об'єкта чи пуль-та бортінженера. Видача блоком 14 команд може здійснюватись як для послідовної перевірки блоків 21 та 1, так і для почергової їх перевірки за сигналами запуску. Система працює наступним чином. При ввімкненні напруги живлення система встановлюється в початковий стан, після чого блоки 1, 21 та 26 починають функціонувати по завданому алгоритму. Сигнали з програмного блока 14 не видаються за виключенням сигналів, дозволяючих проходження команд блока 1 через блок 4 та команд блока 21 через блок 20, та сигналу, який надходить на елемент 13 "НІ". На виході елемен-ту 13 "НІ" з'являється сигнал, який забороняє функціонування блока 3 через елементи "І" блока 9, елементів пам'яті блока 5 зв'язку з виконавчими елементами та лічильника 11. Блок 7 видає сигнали на блок 34 запуску блока 21 вимірювання обертів, які дозволяють запуск програмного блока 14 при досягненні заданих рівней обертів, в тому числі і межового значення, та забороняють - на блок 20 елементів "І". Блок 30 сигналів дозволу видає сигнали на блок 29 запуску, які дозволяють запуск програмного блоку 14 при появі на виході блока 1 сигналів, що свідчать про досягнення параметрами двигуна межових значень та сигнали на блок 4 "n"вхо-дових елементів "І" які забороняють його роботу. При працюючому двигуні сигнали від датчиків надходять на блок 31 нормалізаторів блока 1 сигналізаторів, де перетворюються в завданий рівень постійної напруги зручної як для аналого-циф-рового перетворювання, так і для використання блоком 32 межових обмежень блоку 1 та блоку 8 контролю, функціонуючими за завданими алгоритмами. Обмежувачі блока 32 блока 1 налагоджуються на межові значення параметрів (як мінімальні так і максимальні) та видають команди як при досягненні аварійних режимів роботи газотурбінного двигуна, так і при досягненні завданих (неаварійних) режимів роботи для ввімкнення автоматики двигуна. В процесі функціонування системи робиться як послідовна перевірка технічного стану блока 21, а потім блока 1 по запрошенням АСК або бортінженера так і автоматична при досягненні параметрами газотурбінного двигуна межового (завданого) значення. Від датчика обертів (не показано) частотний сигнал, пропорційний частоті обертів двигуна, надходить до блока 21, який обробляє його за завданим алгоритмом. При порушенні ланцюгу датчику обертів на виході блока 18 з'являється сигнал, забороняючий видачу з блока 21 сигналів заданих рівней обертів та надходячий через елемент 10 "АБО” на вхід лічильника 11, де реєструється при роботі програмного блока 14. При досягненні завданого рівня обертів, при відсутності порушення ланцюгу датчика, вимірювач 33 обертів блока 21 видає сигнал до блока 34 (фіг. 2), який в зв'язку з наявністю на другому його вході дозволяючих сигналів з блока 1 видає сигнал на запуск програмного блока 14. Після отримання сигналу запуску з блока 21 програмний блок 14 по ланцюгу 14-1 знімає сигнал з елемента 13 "НІ", внаслідок чого на виході останнього з'являється сигнал, дозволяючий функціонування елементів пам'яті - тригерів блоку 5 зв'язку з виконавчими елементами, а також блока 9 елементів "І" та лічильника 11. Далі програмний блок 14 видає по ланцюгу 14-2 сигнал до блока 5 та фіксує за допомогою тригера стан виходів блока 21 вимірювання обертів у випадку, якщо присутній дозволяючий сигнал з блока 7 на вході блока 20 елементів "І". Якщо сигнал про досягнення завданого рівня обертів видає блок 21 через блок 20 елементів "І" та надходить дозволяючий сигнал з блока 7, то він фіксується блоком 5 на час проходження самоконтролю. Цим забезпечується безперервність видачі команд на виконавчі елементи на термін проведення самоконтролю блока 21. Далі з заданим інтервалом часу “Т" після видачі сигналу на блок 5 програмний блок 14 видає по ланцюгу 14-3 сигнал на вимірювач 33 обертів блока 21 (фіг. 2), який забороняє проходження сигналу датчика (не показань) обертів та дозволяє проходження імпульсів задатчика 22 контрольної частоти по тракту вимірювача 33. Сигнал, який видається програмним блоком 14 на блок 21 по ланцюгу 14-3, знімає також сигнал заборони, надходячий з блока 18 у випадку порушення ланцюга датчика, на видачу команд з блока 21 при самоконтролі. Одночасно з видачею сигналу по ланцюгу 14-3 до блока 21 видається сигнал по ланцюгу 144 до входу блока 20 елементів "І", забороняючий видачу команд з блока 20 при проведенні самоконтролю. Контрольна частота з задатчика 22 забезпечує видачу сигналів усіх вимірюваних рівней обертів вимірювачем 33, та відповідно бло-ком 21. Якщо вимірювач 33 обертів справне, то на всіх його виходах видаються сигнали. При наявності несправностей в тракті вимірювача 33 обертів (фіг. 2) один або кілька сигналів на його виході відсутні. З інтервалом часу, визначеним бистродією тракту вимірювання обертів, до входу блока 19 по ланцюгу 14-5 видається сигнал. Якщо порушення в функціонуванні тракту вимірювання обертів нема, то в блоці 19 відмова не фіксується. Якщо хоча б один сигнал завданого рівня обертів на виході блока 21 відсутній, в блоці 19 фіксується відмова. Сигнал відмови з блока 19 надходить до блока 20 елементів "І" та забороняє проходження через них сигналів з блока 21 по закінченні самоконтролю. Якщо всі сигнали на виході блока 21 присутні, в блоці 19 відмова не фіксується. З інтервалом часу ''Т" з моменту закінчення сигналу до блока 22952 19 з блока 14 на задатчик 22 контрольної частоти по ланцюгу 14-6 надходить сигнал що завдає режим його роботи, при якому з його виходу на вхід вимірювача 33 обертів блока 21 надходить частотний сигнал, забезпечуючий зняття з його виходу сигналів завданих рівней обертів. Під дією сигналу з задатчика 22 вимірюючий тракт обробляє контрольний сигнал та усі команди з вимірювача 33 обертів блока 21 знімаються, що свідчить про справність вимірювального тракту блока 21. Якщо хоча б один з сигналів завданого рівня обертів на виході вимірювача 33 остається, то це означає що вимірювальний тракт несправний. При наявності хоча б одного сигналу на виході блока 21 та надходження з блока 14 по ланцюгу 14-7 сигналу до блока 19 в ньому фіксується відмова. Сигнал відмови з блока 19 надходить до блока 20 елементів "І" та забороняє проходження через них сигналів з блока 21 по закінченні самоконтролю. У випадку відсутності несправностей в тракті вимірювання обертів та зняття всіх сигналів з виходу блока 21, під дією сигналу по ланцюгу 14-7 в блоці 19 відмова не фіксується. Після цього знімаються сигнали, які надходили по ланцюгам 14-3 та 14-6 з виходу блока 14 до блока 21 та задатчик 22. При цьому припиняється надходження в вимірювальний тракт блока 21 сигналу з задатчика 22 контрольної частоти, який переходить в початковий стан, а в вимірювальний тракт блока 21 надходить сигнал з датчика обертів газотурбінного двигуна. Оскільки сигнал з датчика обертів є завданим рівнем обертів, то з виходу блока 21 видаються сигнали, які надходять на входи власного блока 34 запуску, блока 7 сигналів дозволу, блока 19 відмов обертів та блока 20 елементів "І". З інтервалом часу "Т" після зняття сигналів з блока 14 по ланцюгам 14-3 та 14-6 по ланцюгу 14-8 видається сигнал, під дією якого тригери блока 7, на управляючих входах яких присутні сигнали досягнення завданих рівней обертів, змінюють свій початковий стан. При цьому з виходу блока 7 до відповідних входів блока 34 запуску блока 21 надходять сигнали, забороняючи запуск блока 14, а на відповідні елементи "І" блока 20 надходять сигнали, які відповідають заданим рівням обертів, та дозволяючи проходження через них команд до блоку 5 і далі на виконавчі елементи. Потім знімається забороняючий сигнал, який надходив по ланцюгу 144 блока 14, та видається сигнал, дозволяючий проходження сигналів завданих рівней обертів через блок 20 елементів "І" та далі через блок 5 на виконавчі елементи (не показані). Таким чином, блок 7 сигналів дозволу забезпечує видачу команд завданих рівней обертів на виконавчі елементи при досягненні двигуном завданих рівней обертів тільки після проведення контролю функціонування блока 21. Цим виключається помилкова видача сигналів на виконавчі елементи. Крім того з вимірювача 33 обертів блока 21 сигнал у вигляді прямокутних імпульсів, період слідування яких пропорцієн кількості обертів газотурбінного двигуна, надходить на перетворювач 23 частота-код. При зміненні режиму роботи газотурбінного двигуна оберти досягають наступного більш вищого рівня, на виході вимірювача 33 обертів блока 21 з'являється сигнал, який надходить до блока 34 запуску та відбувається запуск програмного блока 14. При цьому цикл проведення самоконтролю блока 21, описаний вище, повторюється. Якщо при зміненні режиму роботи газотурбінного двигуна в сторону зменшення обертів вони стануть нижче завданого рівня, то сигнал на виході блоку 5 знімається. Зняття сигналу завданого рівня обертів з виходу блока 5 приводить до появлення на виході відповідного формувача блока 6 сигналу, який встановлює відповідний тригер блока в початковий стан, при якому на відповідний елемент "І" блока 20 надходить сигнал, забороняючий проходження через нього до блока 5 і далі на виконавчий елемент команд відповідного рівня обертів, а до блока 34 - сигнал, дозволяючий запуск програмного блока 14 при повторному до-сягненні раніш знятого сигналу завданого рівня обертів. Таким чином, на виконавчі елементи сигнали про досягненя завданих рівней обертів надходять тільки після проходження самоконтролю, відсутність відмов в тракті вимірювання рівней обертів і тільки при повторному підтвердженні досягнення завданого рівня обертів. Після завершення перевірки технічного стану блока 21 вимірювання обертів може початися перевірка технічного стану блока 1 сигналізаторів. Після завершення перевірки технічного стану блоку 21 вимірювання обертів (у випадку послідовної перевірки) починається перевірка технічного стану блока 1 сигналізаторів. Перевірка технічного стану блока 1 сигналізаторів полягає в наступному. Програмний блок 14 по ланцюгу 14-9 видає сигнал на вхід блока 5 та фіксує в ньому за допомогою тригерів стан виходів блока 1 сигналізаторів, якщо є дозволяючий сигнал з блока 30 сигналів дозволу на вході відповідного елемента “І” блока 4. Якщо сигнал про досягнення відповідним параметром завданого значення видається блоком 32 блока 1 через блок 4 елементів "І" та надходить дозволяючий сигнал з блока 30 на вхід відповідного елемента "І" блока 4, то він фіксується блоком 5 на час проходження самоконтролю. Одночасно з видачею по ланцюгу 14-9 сигналу до блока 5 програмний блок 14 по ланцюгу 14-10 видає сигнал на блок 2 управління переналагодженням, який фіксує вихідний стан блока 32 межових обмежень блока 1 для забезпечення їх переладнання на видачу або зняття сигналів з виходів блока 1 та для керування роботою блока 3 формування відмови через блок 9 елементів "І". Потім з програмного блока 14 по ланцюгу 1411 видається сигнал до блока 4 та забороняє проходження команд з блока 1 сигналізаторів до блока 5 зв'язку з виконавчими елементами. Наступна команда, яка надходить по ланцюгу 14-12 відповідно до блоків 15 та 16 змінення мінімального та максимального рівня ладнання, при наявності відповідних сигналів з блока 2 управління переладнання переладнає блок 32 блока 1 на видачу сигналів (якщо сигнали до цього часу не видавалися) або на їх зняття (якщо сигнали до цього часу видавалися). При цьому сигнали через блок 4 "n"входових елементів "І" не проходять внаслідок наявності на його вході забороняючого сигналу з програмного блока 14. 22952 Якщо переладнання блока 32 блока 1 робиться в відповідності з алгоритмом самоконтролю, визначаємим сигналами з виходу блока 1, які надходять безпосередньо, та сигналами, які надходять з виходу блока 2 керування переладнанням через блок 9 елементів "І" до блока 3 формування відмови, то відмова в блоці 3, при надходженні наступної команди по ланцюгу 14-13 з програмного блока 14, не фіксується. Блок 9 елементів "І" призначений для керування роботою блока 3 з метою підвищення його перешкодостійкості. Якщо переладнання одного з каналів блока 32 межових обмежень блока 1 внаслідок порушення ланцюгу його датчика відбувається не у відповідності з алгоритмом контролю, то внаслідок дії забороняючого сигналу з блоку 8 на вхід відповідного елементу "І" блоку 9 в блоці 3 також не фіксується відмова по даному каналу. Якщо хоча б один з каналів блока 1 не видає сигнал, (внаслідок переналагодження він повинен був його видати), або не знімає сигнал хоча він повинен був зняти його з виходу (при відсутності порушення ланцюгу датчика), то по мірі надходження сигналу з програмного блока 14 в блоці 3 фіксується відмова. Сигнал відмови надходить на вхід елемента "І" блока 4, відповідно відмовившому каналу. Цим виключається помилкова видача сигналів на виконавчі елементи після проходження самоконтролю. Крім того, сигнал відмови через елемент 10 "АБО'' надходить на вхід лічильника 11 та фіксується в ньому при надходженні сигналу по ланцюгу 14-14 з програмного блока 14. При надходженні сигналу по ланцюгу 14-14 в лічильнику 11 фіксується також відмова блока 21 вимірювання обертів та порушення ланцюгу датчика як сигналізаторів, так і обертів. Одночасно з видачею програмним блоком 14 сигналу на лічильник 11 він знімає по ланцюгу 14-12 команду переладнання з блоків 15 та 16 змінення мінімального та максимального рівней ладнання і канали блока 32 блока 1 переладнуються на завдані (робочі) рівні обмеження. Так як сигнали з датчиків контролюємих параметрів будуть відповідати завданим рівням обмеження, то на виході блока 1 сигналізаторів будуть видаватися сигнали, які надходять на входи блока 29 запуску, блока 30 сигналів дозволу та блока 4 "n"-входових елементів "І". З інтервалом часу після зняття сигналу по ланцюгу 14-12 з блока 14 по ланцюгу 14-15 видається сигнал, під дією якого тригери блока 30, на керуючих входах яких присутні сигнали досягнення параметрами межових зна-чень, змінюють свій початковий стан. При цьому на відповідні входи блока 29 запуску будуть надходити сигнали, які забороняють запуск блока 14, а на відповідні елементи "І" блока 4 будуть надходити сигнали, які відповідають завданим рівням обмеження параметрів, дозволяючи проходження, через них, до блока 5 та далі на виконавчі еле-менти. Після цього знімається забороняючий сигнал, який надходив по ланцюгу 14-11 блока 14, та видається сигнал, дозволяючий проходження сигналів завданих рівней обмеження параметрів через блок 4 "n"входових елементів "І" та далі через блок 5 на виконавчі елементи. З вищевикладеного бачимо, що блок 30 сигналів дозволу забезпечує видачу команд, заданих рівней обмеження параметрів, на виконавчі елементи при досягненні заданих рівней обмеження тільки після проведення контролю функціонування блока 1 сигналізаторів. Цим виключається помилкова видача сигналів на виконавчі елементи. Якщо при зміненні режиму роботи газотурбінного двигуна значення параметру стало нижче рівня обмеження, то сигнал на вході блока 5 знімається. Зняття сигналу заданого рівня обмеження з виходу блока 5 призводить до появлення на виході відповідного формувача блока 6 сигналу, який ус-тановлює відповідний тригер в блоці 30 сигналів дозволу в початковий стан, при якому на відповідний елемент блока 4 буде надходити сигнал, забороняючий проходження на виконавчий елемент команд відповідних рівней обмеження параметрів, а до блока 29 - сигнал, дозволяючий запуск програмного блока 14 при повторному досягненні раніш знятого сигналу завданого рівня обмеження параметру. Таким чином, на виконавчі елементи сигнали про досягнення межових рівней обмеження параметрів потрапляють тільки після проходження самоконтролю, відсутність відмов в тракті блока 1 сигналізаторів і тільки при повторному підтвердженні досягнення параметром свого межового значення. Останнім знімається сигнал, який надходить з програмного блока 14 на вхід елемента 13 "НІ" по ланцюгу 14-1 і програмний блок 14 установлюється в початковий стан. При порушенні ланцюга датчика одного з каналів блока 32 блока 1 або відмови одного з нормалізаторів блока 31 блока 1, який призведе до зникнення сигналу на його виході, що рівнозначно аварійному стану газотурбінного двигуна, наприклад, за мінімальним тиском масла в маслосистемі двигуна, або до збільшення сигналу на вході відповідного каналу блока 32 блока 1, що рівнозначно також аварійному стану двигуна, наприклад, за максимальною температурою масла в маслосистемі двигуна, на виході блока 8 з'явиться сигнал, який, діючи на відповідний канал блока 32, в ланцюгу датчика якого або нормалізатора блока 31 виникло порушення, забороняє видачу їм команди на виконавчий елемент. Сигнал про порушення ланцюгу датчика при відмові нормалізатора блока 31 блока 1 з виходу блока 8 потрапляє також на відповідний елемент "І" блока 9 і, таким чином, забороняє формування сигналу відмови по чинному каналу в блоці 3 при проходженні самоконтролю, так як порушується режим роботи сигналізатора при відмовах в ланцюгу датчика. Відмова відповідного нормалізатора блока 31 блока 1 буде виявлена за наслідками дешифрування польотних даних зареєстрованих в блоці 28 пам'яті після кожного польоту літального апарату. Крім того, сигнал про порушення ланцюга датчика або відмови нормалізатора блока 31 блока 1 через елемент 10 "АБО" надходить на вхід лічильника 11 та фіксується в ньому при проходже-нні самоконтролю. Якщо короткочасне порушення ланцюга датчика виникло в період відсутності самоконтролю, на час більше ніж постійна часу нормалізаторів блока 31 блока 1, то буде тільки заборонена видача помилкової команди з виходу відповідного каналу блока 32 блока 1. Якщо видача команди виникає внаслідок відмови 22952 одного з каналів блока 32 блока 1, то при проведенні самоконтролю фіксується відмова відповідного каналу, а команда в цьому випадку на виконавчий елемент не видається. Якщо при проходженні кількох циклів контролю, наприклад трьох на виході блока 3 зберігається сигнал відмови хоча б одного каналу блока 32 блоком 1, при порушенні хоча б одного з контролюємих ланцюгів датчиків або відмови хоча б одного з каналів блока 31 блока 1, а також при з’явленні сигналу відмови на виході блока 19 на виході лічильника 11 видається сигнал стійкої відмови або порушення ланцюга датчика. При наявності сигналу з виходу лічильника 11 та елемента 10 "АБО” на виході елемента 12 "І" з'являється сигнал, який надходить в бортову систему реєстрації. При короткочасному випадковому порушенні ланцюга датчика в час дії вібраційних навантажень або отриманні сигналу відмови сигналізатора блока, 32 блока 1 або блока 21 вимірювання обертів від випадкового збою при функціонуванні або проведенні самоконтролю наступний цикл контролю не дає підтвердження вказаних відмов, внаслідок чого лічильник 11 обнулюється, тобто повертається до початкового стану. Автоматичний режим контролю функціонування тракту блока 1 по сигналу запуску з блока 29 визначається в наступному. При досягненні одним з параметрів свого межового значення блок 1 видає сигнал на блок 29 запуску, який в зв'язку з наявністю на другому його вході дозволяючих сигналів з блока 30 сигналів дозволу, видає сигнал на запуск програмного блока 14. Після отримання сигналу з блока 29 програмний блок 14 по ланцюгу 14-1 знімає сигнал з елемента 13 "НІ", внаслідок чого на його виході з'являється сигнал, дозволяючий функціонування елементів пам'яті блока 5 зв'язку з виконавчими елементами, блока 9 елементів "І" та лічильника 11. Далі програмний блок 14 видає по ланцюгу 149 сигнал на блок 5 та фіксує за допомогою тригерів стан виходів блока 1, якщо є дозволяючий сигнал на вході блока 4 "n"-входових елементів "І", який надходить з блока 30 сигналів дозволу. Якщо сигнал, який свідчить про досягнення па-раметром свого межового значення, видається блоком 1 через блок 4 елементів "І", за наявністю на його вході дозволяючого сигналу з блока 30, то він фіксується блоком 5 на період проведення самоконтролю. Цим забезпечується безперервність видачі команд на виконавчі елементи на період проведення самоконтролю блока 1. Одночасно з видачею по ланцюгу 14-9 сигналу на блок 5 програмний блок 14 по ланцюгу 14-10 видає сигнал на блок 2 управління переналагодженням і цикл контролю функціонування блока 1 виконується за вищезазначеним алгоритмом. Реєстрація поточних значень параметрів газотурбінного двигуна від його запуску до зупинення, а також стан ланцюгів датчиків виконується в наступному порядку. Операційний блок 26 видає сигнали, наприклад, в вигляді двійкового коду, на комутатор 24 для почергового підключення сигналів з виходу блока 31 нормалізаторів блока 1, значення яких характеризують стан газотурбінного двигуна. У наслідок чого сигнал з виходу блока 31 блока 1 через комутатор 24 надходить на аналого-цифровий перетворювач 25, де перетворюється в двійковий код. З інтервалом часу, визначеним швидкодією перетворювача 25, після видачі на його вхід сигналу з виходу комутатора 24, операційний блок 26 видає сигнал на вхід аналого-цифрового перетворювача 25. Внаслідок, наприклад, послідовний двійковий код з виходу аналого-цифрового перетворювача 25 надходить на вхід блока 26 та реєструється в його пам'яті. По закінченню перетворювання всіх аналогових сигналів з виходу блока 31 блока 1 та запису результатів перетворювання в пам'ять блока 26, останній припиняє видачу сигналів на комутатор 24. Після чого операційний блок 26 видає сигнал на перетворювач 23 частота-код і наслідок перетворювання частотного сигналу, який надходить з виходу блока 21, наприклад, в вигляді послідовного двійкового коду надходить на вхід операційного блока 26, де і фіксується в його пам'яті. Перетворювач 23 частота-код перетворює частотний сигнал, який надходить з виходу вимірювача 33 обертів блока 21, в двійковий код великість якого пропорційна обертам газотурбінного двигуна. По закінченні запису кода, який характеризує рівень обертів двигуна з перетворювача 23, операційний блок 26 видає сигнал на шинний формувач 27 для підключення виходів блока 8 та блока 18 до свого входу з послідуючою реєстрацією сигналів з блоків 8 та 18 в пам'яті. Після завершення запису сигналів з блока 8 та бло-ка 18 операційний блок 26 знімає сигнал з шинного формувача 27 і виходи блока 8 та блока 18 відключаються від входу блока 26 чим і завершується цикл запису значень реєструємих параметрів в пам'яті операційного блока 26. Операційним блоком 26, з записаної в його пам'яті інформації, формується кадр, який їм же переписується в відповідні адреси блока 28 пам'яті. Цим і завершується цикл запису параметрів газотурбінного двигуна та стан ланцюгів датчиків в пам'ять блока 28, після чого операційний блок 26 видає сигнали на комутатор 24 та цикл реєстрації сигналів, які характеризують стан газотурбінного двигуна, повторюється відповідно описаному вище алгоритму. Після завершення польотів літального апарату або наземних гонок двигунів до системи підключається зчитувальне приладдя, яке на вхід операційного блока 26 по ланцюгу зв'язку видає інформацію, наприклад, в вигляді двійкового коду, під впливом якого блок 26 переході до режиму зчитування накопиченої інформації блоком 28 пам'яті. В цьому режиму операційний блок 26 видає в блок 28 послідовні адресні кодові значення для забезпечення послідовного зчитування двійкового коду (накопиченої інформації), через операційний блок 26. Зчитана інформація прямує до центру дешифрування польотних даних, де аналізується стан газотурбінного двигуна в тому ж рахунку і ланцюгів датчиків, та визначається або необхідність проведення різноманітних профілактичних (ремонтних) заходів або послідуюча його експлуатація. 22952 Очікуваний винахід дозволяє виключити аварійні ситуації на борту літального апарата за рахунок виключення видачі помилкових команд за допомогою проведення самоконтролю блока, сигналізаторів перед видачею команд на виконавчі еле-менти та підвищити таким чином безпеку польотів. Крім того, очікуване технічне рішення за рахунок забезпечення реєстрації параметрів, які характеризують стан газотурбінного двигуна та стан ланцюгів датчиків, дозволить забезпечити надійну експлуатацію газотурбінного двигуна за технічним станом, скоротити час на усунення відмов в обладнанні двигуна та ланцюгів датчиків, і як наслідок підвищити надійність та знизити вартість експлуатації газотурбінного двигуна, а також скоротити бездію авіаційної техніки. 22952 Фіг. 1 22952 22952 Фіг. 2
ДивитисяДодаткова інформація
Автори англійськоюBezschastnyi Vasyl Oleksiiovych
Автори російськоюБессчастный Василий Алексеевич
МПК / Мітки
МПК: F02C 9/28
Мітки: газотурбінного, двигуна, керування, система, контролю, параметрів
Код посилання
<a href="https://ua.patents.su/11-22952-sistema-keruvannya-ta-kontrolyu-parametriv-gazoturbinnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Система керування та контролю параметрів газотурбінного двигуна</a>
Система управління та контролю параметрів газотурбинного двигуна
Номер патенту: 22952
Опубліковано: 05.05.1998
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: система, управління, двигуна, газотурбінного, контролю, параметрів
Формула / Реферат:
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, який з'єднано з блоком керування переладнанням блоком формування відмови, блоком n –входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднано з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, першим блоком елементів "І" та елементом...
Система для гідрологічних спостережень та пристрій для контролю параметрів води
Номер патенту: 35984
Опубліковано: 16.04.2001
Автори: Світлицький Олександр Михайлович, Федосеєва Олена Анатоліївна, Федосеєв Олександр Сергійович, Світлицький Анатолій Михайлович
МПК: G01F 23/00, G01F 23/24
Мітки: пристрій, параметрів, гідрологічних, води, контролю, система, спостережень
Формула / Реферат:
1. Система для гідрологічних спостережень, вміщувща гідрологічний зонд з датчиками контролю рівня води, її температури та електропроводності, контейнер з лебідкою, блоком електроживлення та центральным керуючим пристрівм з аналого-цифровим перетворювачем на вході, яка відрізняється тим, що система обладнана блоком прецізійних вимірів аналогових сигналів, включеним між виходами вимірювальних датчиків та центральним керуючим пристрієм,...
Пристрій для контролю температури газів газотурбінного двигуна
Номер патенту: 4821
Опубліковано: 28.12.1994
Автори: Савчук Анатолій Константинович, Клокун Володимир Іванович, Михайленко Володимир Іванович
МПК: G01K 7/02, H03M 1/00, F01D 25/00
Мітки: контролю, газотурбінного, температури, газів, двигуна, пристрій
Формула / Реферат:
Устройство для контроля температуры газов газотурбинного двигателя, содержащее термоэлектрический преобразователь, усилитель сигнала, состоящий из последовательно включенных модулятора, усилителя переменного тока и демодулятора, парафазный генератор, первый выход которого соединен с управляющими входами демодулятора и модулятора, первый вход которого соединен с выводами термоэлектрического преобразователя, второй вход подключен к выходу...
Пристрій для контролю температури газів газотурбінного двигуна
Номер патенту: 18457
Опубліковано: 25.12.1997
Автор: Михайленко Володимир Іванович
МПК: G01K 7/02
Мітки: температури, газів, пристрій, контролю, газотурбінного, двигуна
Формула / Реферат:
Устройство для контроля температуры газов газотурбинного двигателя, содержащее термоэлектрический преобразователь, последовательно соединенные первый элемент И-НЕ, элемент ИЛИ-НЕ и первый элемент И, второй вход которого подключен к выходу второго элемента И-НЕ, усилитель сигнала, состоящий из последовательно соединенных модулятора, усилителя переменного тока и демодулятора, выход которого подключен к первому входу компаратора, второй вход...
Система керування та захусту судового газотурбінного устаткування
Номер патенту: 1761
Опубліковано: 25.10.1994
Автори: Дзюріч Анатолій Іванович, Москалець Павло Пімонович, Плужніков Олександр Федорович
МПК: B63H 21/00
Мітки: устаткування, система, газотурбінного, судового, захусту, керування
Формула / Реферат:
Система управления и защиты судовой газотурбинной установки, включающей в себя газотурбинный двигатель со свободной силовой турбиной, работающий через гидромуфты переднего или заднего хода, и редуктор на гребной винт. содержащая исполнительный механизм, кинематически связанный с дозатором топлива и подключенный к задатчику, последовательно соединенные датчики аварий ной защиты двигателя и редуктора, блок защиты и стоп-кран и клапаны...
Попередній патент: Спосіб кислотної обробки привибійної зони пласта
Наступний патент: Композиція інгредієнтів до горілки “надія”
Випадковий патент: Спосіб прогнозування післяопераційних запальних ускладнень у хворих на первинну глаукому у поєднанні з катарактою