Спосіб встановлення плавного зачеплення механізму перемикання передач та трансмісійний пристрій, який має відношення до цього
Формула / Реферат
1. Спосіб встановлення поступової зміни з попереднього передаточного числа на нове передаточне число у передаточному механізмі, який включає пристрій для вибіркового сполучення двох ротаційних елементів, практично нерегульовані джерела сили для приведення засобу вибіркового сполучення у заданий стан ковзання або захоплення, що відповідає новому числу, привідний засіб, здатний на приведення засобу вибіркового сполучення в інший з вищезгаданих станів, що відповідає попередньому передаточному числу, який відрізняється тим, що спосіб включає, одночасно з приведенням за допомогою джерела сили засобу вибіркового сполучення у стан, що відповідає новому числу, етап регулювання привідного засобу таким чином, щоб він створював вимірювану супротивну силу, що уповільнює перехід з попереднього передаточного числа на нове передаточне число.
2. Спосіб за п. 1, який відрізняється тим, що його застосовують до передаточного механізму, привідним засобом якого є гідропривід, та етап регулювання здійснюють шляхом вибіркового сполучення гідравлічної камери пускача з джерелом тиску.
3. Спосіб за п. 2, який відрізняється тим, що вищезгадану супротивну силу регулюють шляхом чергування фази, при якій гідравлічна камера є з'єднаною зі спускним каналом, і фази, під час якої гідравлічна камера є з'єднаною з джерелом тиску.
4. Спосіб за одним з пп. з 1 по 3, який відрізняється тим, що пускач збуджують за допомогою імпульсів.
5. Спосіб за п. 4, який відрізняється тим, що силу регулюють шляхом регулювання тривалості імпульсів.
6. Спосіб за одним з пп. з 1 по 5, який відрізняється тим, що до привідного засобу застосовують збудження, яке знижують, починаючи з максимального, згідно з заданим графіком зниження.
7. Спосіб за п. 6, який відрізняється тим, що існує розрахована фізична величина, на яку впливають поступова зміна попереднього передаточного числа на нове передаточне число, та тим, що привідний засіб регулюють залежно від результату цього виявлення.
8. Спосіб за п. 7, який відрізняється тим, що як фізичну величину розраховують принаймні одну швидкість обертання та порівнюють її з іншою швидкістю обертання, по відношенню до якої вона змінюється під час процесу зміни передаточного числа.
9. Спосіб за п. 7 або 8, який відрізняється тим, що супротивну силу регулюють згідно з різницею між реальною величиною, одержаною шляхом розрахунку фізичної величини, та командною величиною під час процесу зміни передаточного числа.
10. Спосіб за одним з пп. з 7 по 9, який відрізняється тим, що іншу зміну стану у передаточному механізмі регулюють згідно з розрахованою фізичною величиною.
11. Спосіб за п. 10, який відрізняється тим, що регулювання іншої зміни стану охоплює початок вищезгаданої іншої зміни стану, коли фізична величина пройшла заданий поріг.
12. Спосіб за п. 10 або 11, який характеризується визначенням, чи є вищезгадана інша зміна стану необхідною згідно з діапазоном величин, у якому фізична величина змінюється під час зміни передаточного числа.
13. Спосіб за одним з пп. з 7 по 12, який відрізняється тим, що як фізичну величину розраховують вхідну швидкість передаточного механізму, порівнюючи з вихідною швидкістю передаточного механізму.
14. Спосіб за одним з пп. з 1 по 13, який відрізняється тим, що під час процесу зміни передаточного числа джерело сили не зазнає безпосереднього регулювання.
15. Спосіб за одним з пп. з 1 по 14, який відрізняється тим, що його застосовують до передаточного механізму, у якому джерело сили належить до відцентрового типу.
16. Спосіб за одним з пп. з 1 по 15, який відрізняється тим, що привідний засіб діє у тому ж самому напрямі на пристрій вибіркового сполучення як сила, що виникає пропорційно крутному моменту, переданому на передаточний механізм.
17. Передаточний механізм для транспортного засобу, який включає принаймні одну зубчасту передачу, засіб вибіркового сполучення, здатний шляхом зміни попереднього стану сполучення на новий забезпечувати зміну зубчастої передачі з попереднього передаточного числа на нове передаточне число, практично нерегульоване джерело сили, здатне викликати зміну у засобі вибіркового сполучення з попереднього сполучення на нове сполучення, привідний засіб, здатний на застосування до засобу вибіркового сполучення дії, спрямованої на приведення його у попередній стан сполучення, блок управління для регулювання привідного засобу, який відрізняється тим, що блок управління включає засіб поступового просування для забезпечення прикладення привідним засобом сили вимірюваної величини, що уповільнює зміну засобу вибіркового сполучення зі стану попереднього сполучення на стан нового сполучення під дією джерела сили.
18. Передаточний механізм за п. 17, який відрізняється тим, що пускач є гідроприводом, і тим, що засіб поступового просування сконструйовано таким чином, що він чергує фазу зниження тиску та фазу застосування тиску до робочої камери пускача.
19. Передаточний механізм за п. 18, який відрізняється тим, що спускний канал пускача є гідравлічно стійким.
20. Передаточний механізм за одним з пп. з 17 по 19, який відрізняється тим, що засіб поступового просування сконструйовано так, щоб він створював імпульси, що надсилаються принаймні непрямо на привідний засіб.
21. Передаточний механізм за п. 20, який відрізняється тим, що імпульси мають різну тривалість.
22. Передаточний механізм за п. 20 або 21, який відрізняється тим, що засіб поступового просування здатний безперервно вибірково надсилати імпульси постійної тривалості, меншої за 100%, з метою забезпечення створення пускачем сили, яка коректує спонтанну зміну умов передаточного числа у передаточному механізмі.
23. Передаточний механізм за одним з пп. з 17 по 22, який відрізняється тим, що блок управління має вхід, з'єднаний із засобами виявлення фізичної величини, яка здатна зазнавати впливу поступової зміни передаточного числа після її початку.
24. Передаточний механізм за п. 23, який відрізняється тим, що засоби управління реагують на зміну вищезгаданої фізичної величини з метою врегулювання дії привідного засобу підчас зміни попереднього передаточного числа на нове передаточне число.
25. Передаточний механізм за одним з пп. 23 або 24, який відрізняється тим, що фізична величина, на яку реагує блок управління, включає вхідну швидкість пристрою у порівнянні з вихідною швидкістю пристрою.
26. Передаточний механізм за одним з пп. з 23 по 25, який відрізняється тим, що блок управління здійснює серворегулювання зміни фізичної величини відносно командної.
27. Передаточний механізм за одним з пп. з 23 по 25, який відрізняється тим, що блок управління реагує на зміну фізичної величини з метою започаткування запрограмованого, принаймні непрямого, збудження пускача.
28. Передаточний механізм за одним з пп. з 23 по 27, який відрізняється тим, що блок управління, крім того, реагує на порогову величину фізичної величини з метою започаткування іншої зміни стану у передаточному механізмі.
29. Передаточний механізм за п. 28, який відрізняється тим, що включає дві зубчасті передачі, змонтовані послідовно, тим, що сполучний пристрій є зв'язаним з першою зубчастою передачею, у якій перепад між попереднім числом та новим числом є відносно великим, та тим, що вищезгадана інша зміна стану стосується іншої зубчастої передачі для зміни числа в іншому напрямку з меншим перепадом.
30. Передаточний механізм за одним з пп. з 17 по 29, який відрізняється тим, що джерелом сили є відцентрові пристрої.
31. Передаточний механізм за одним з пп. з 17 по 30, який відрізняється тим, що привідний засіб є змонтованим таким чином, щоб діяти спільно з пристроєм вибіркового сполучення у тому ж самому напрямі, що й автоматичний блок управління, що створює силу, представлену крутним моментом, переданим у передаточному механізмі.
32. Передаточний механізм за п. 31, який відрізняється тим, що автоматичний блок управління є засобом передачі на пристрій вибіркового сполучення сили зубчастої реакції у зубчастій передачі.
33. Передаточний механізм за одним з пп. з 30 по 32, який відрізняється тим, що стан попереднього сполучення є вільним станом, у якому обертальний крутний момент передається зубчастою передачею, і стан нового сполучення е станом цього зчеплення, у якому, з точки зору передачі крутного моменту, зубчаста передача є короткозамкненим пристроєм вибіркового сполучення.
Текст
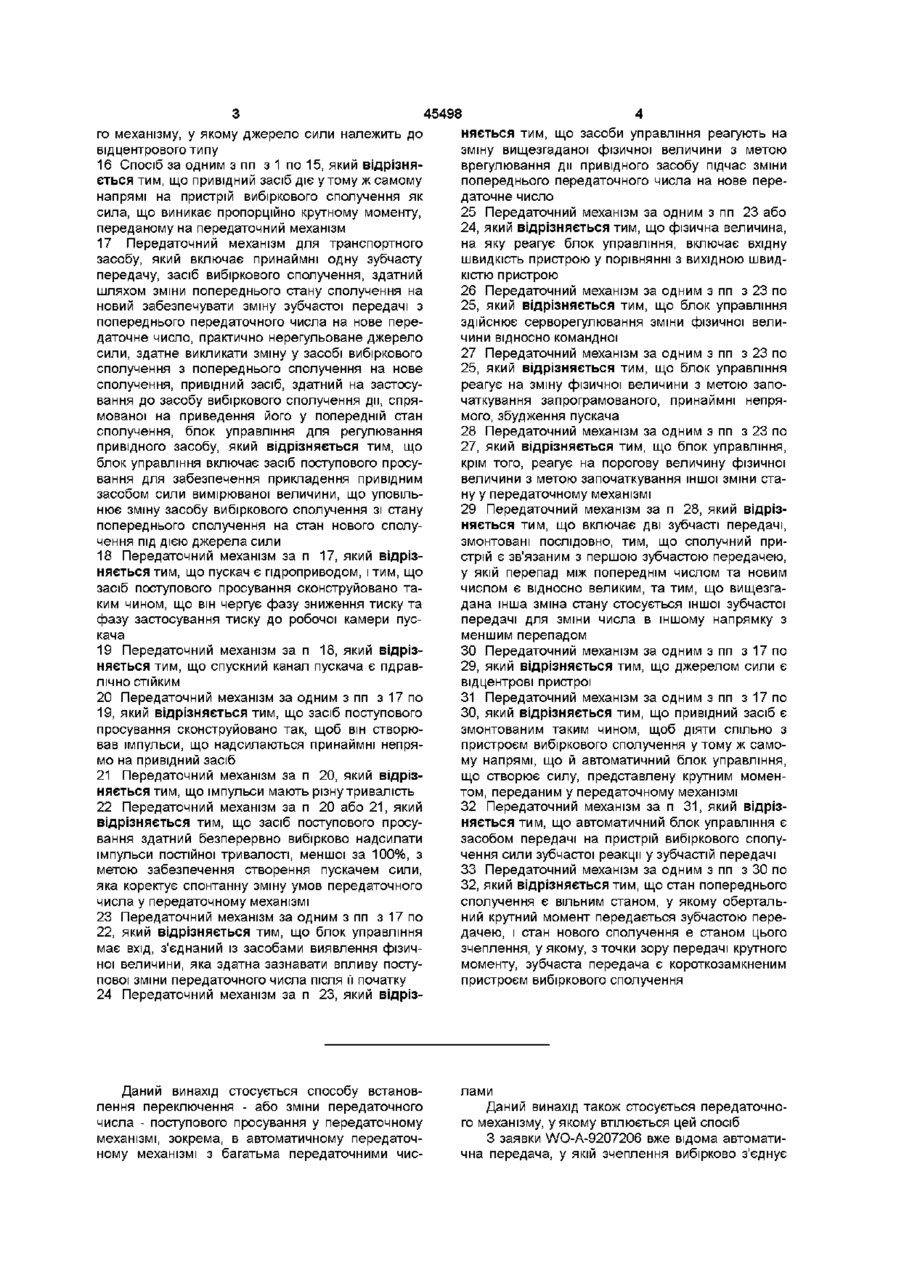
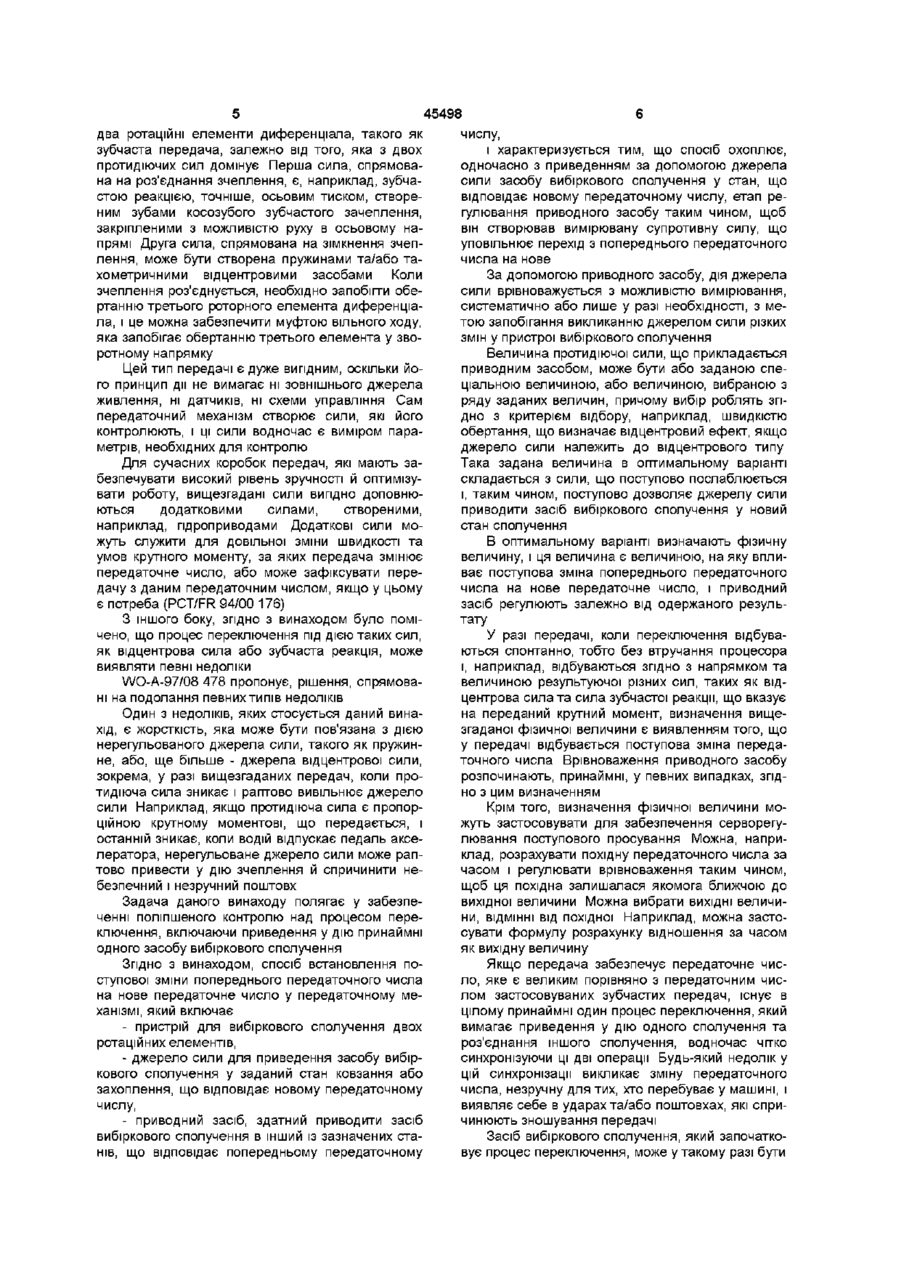
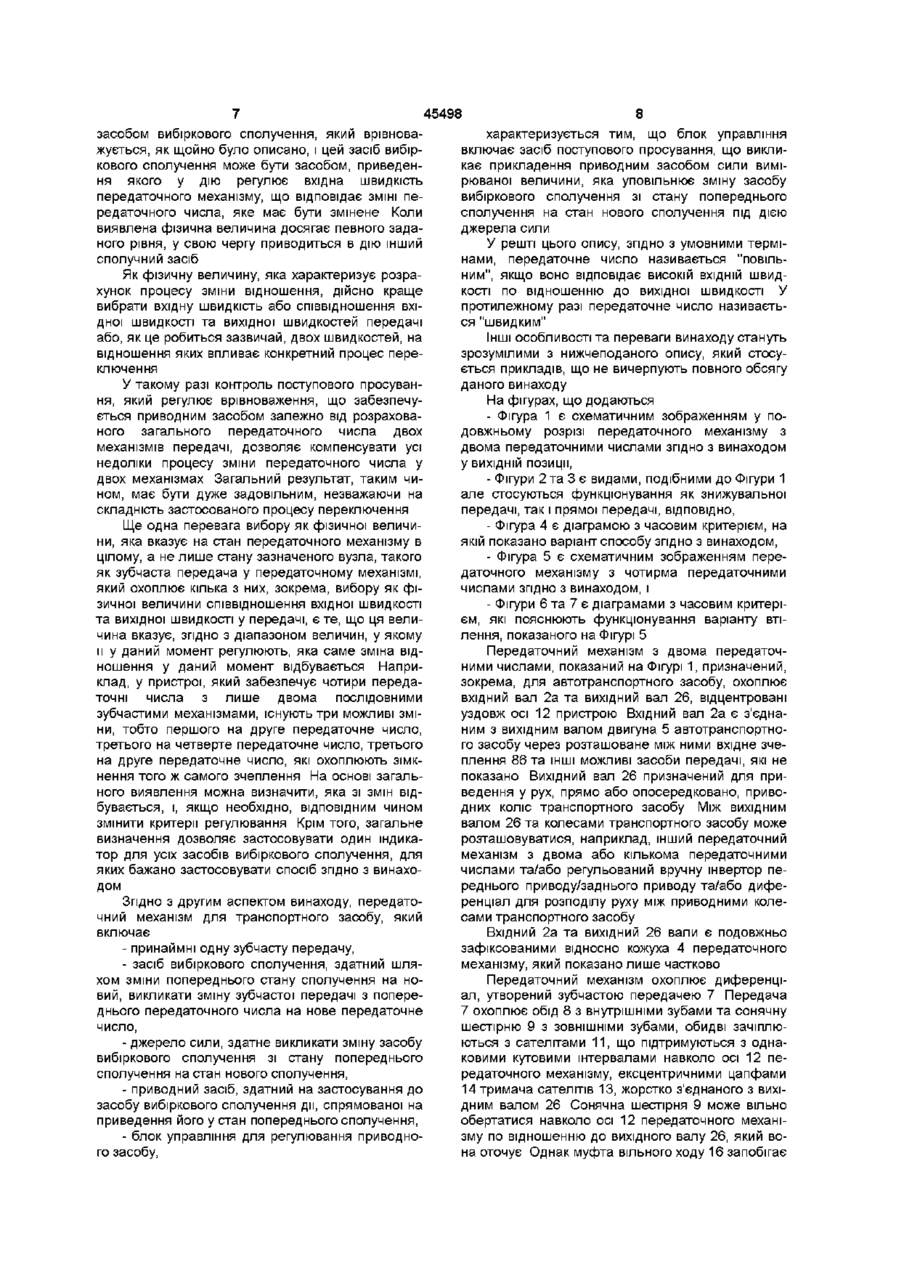
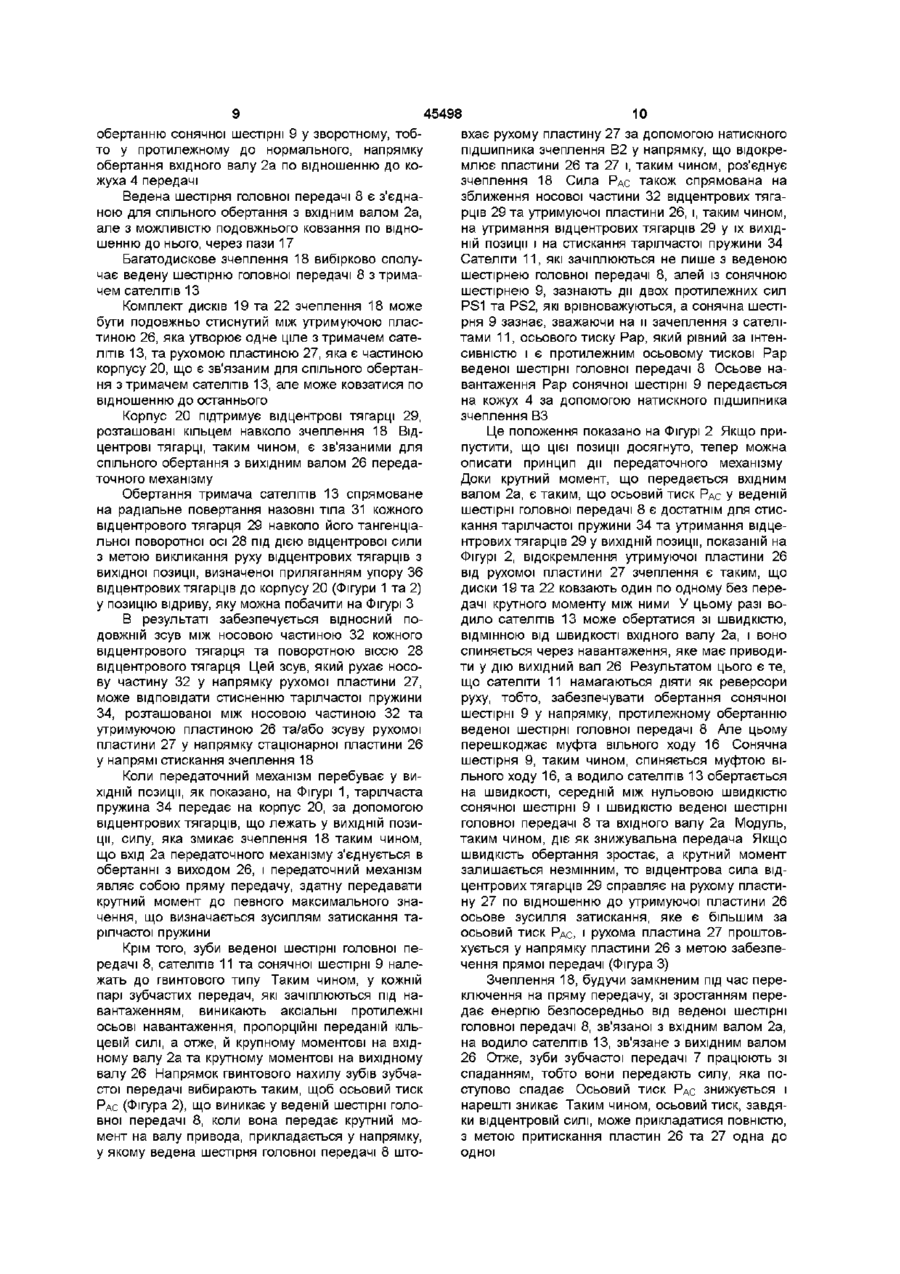
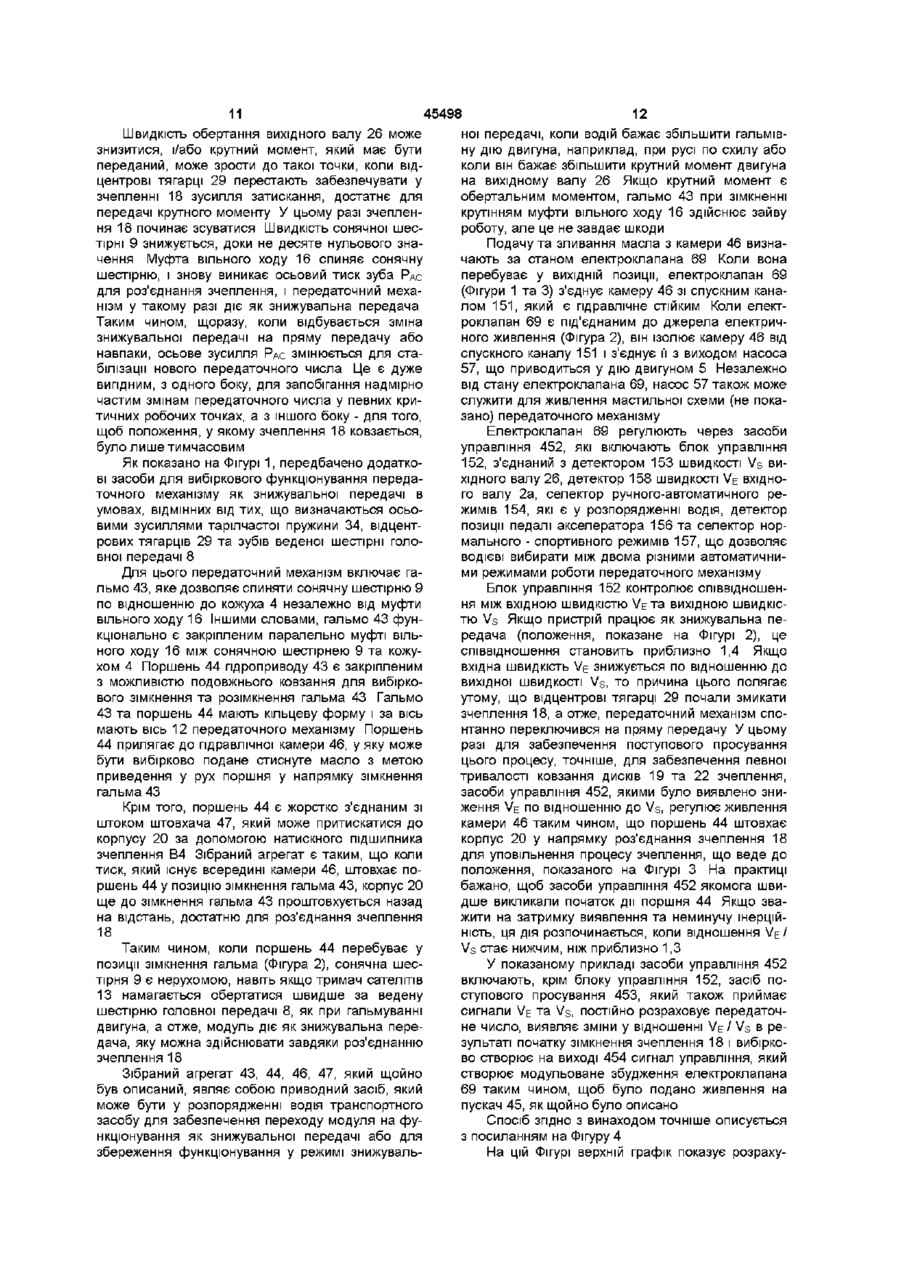
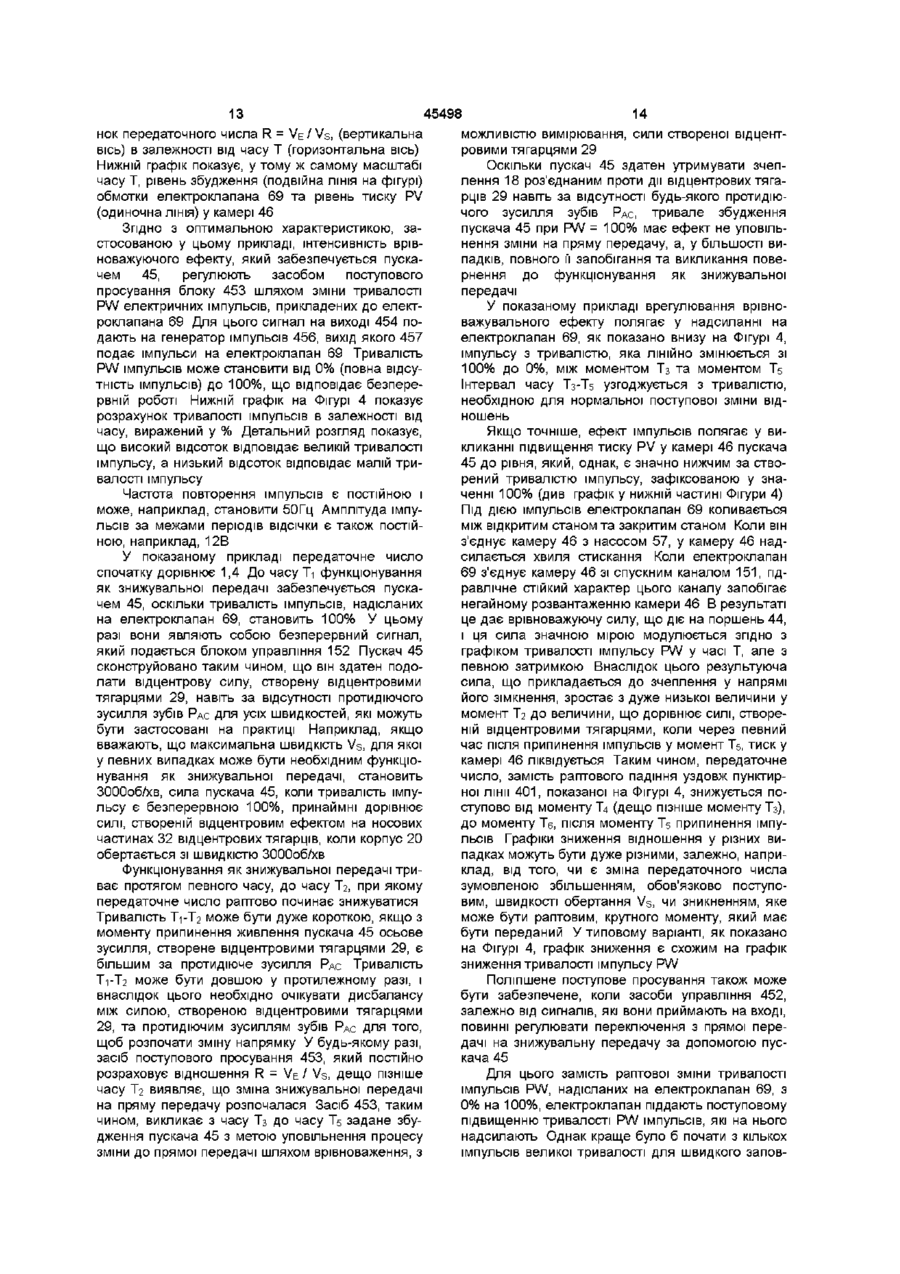
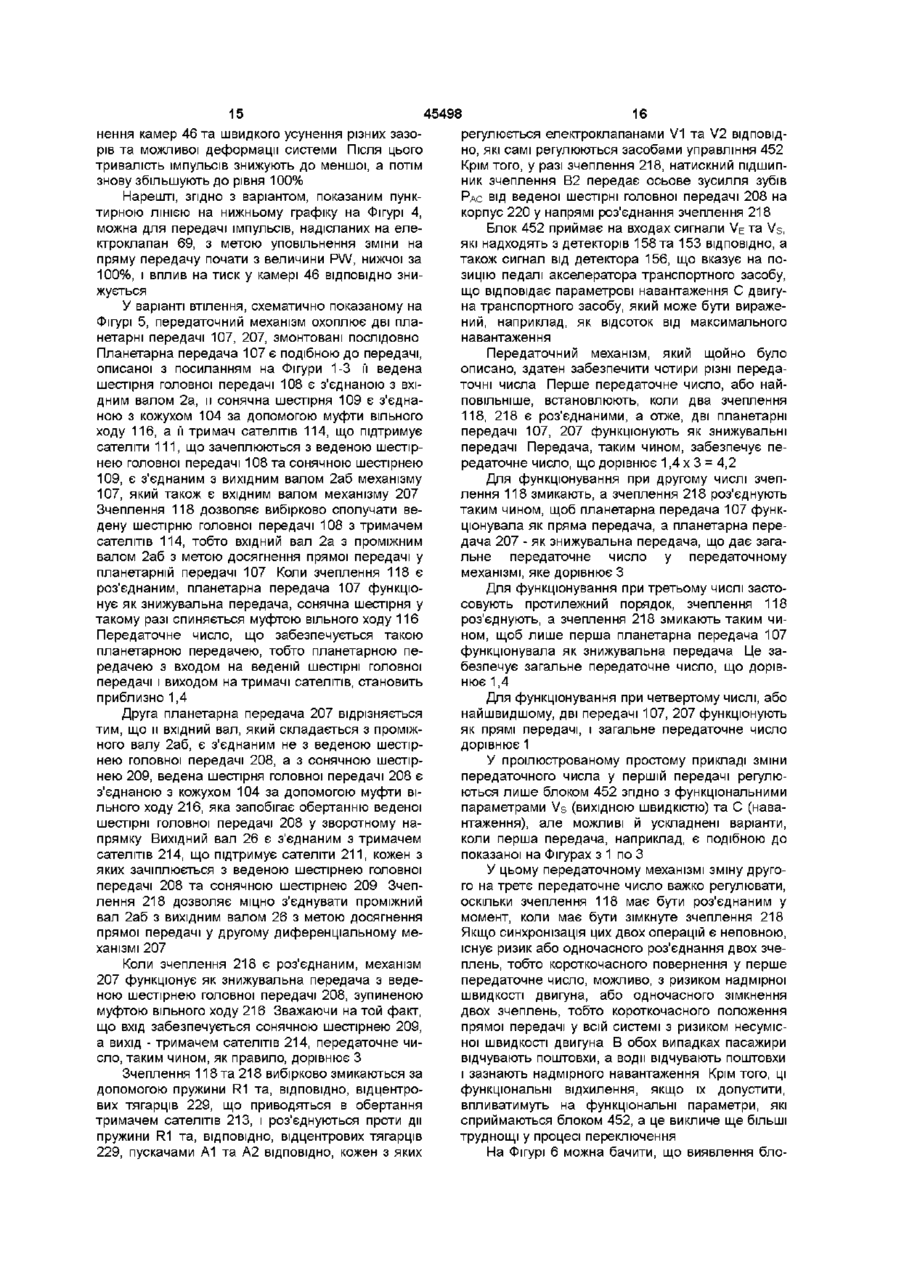
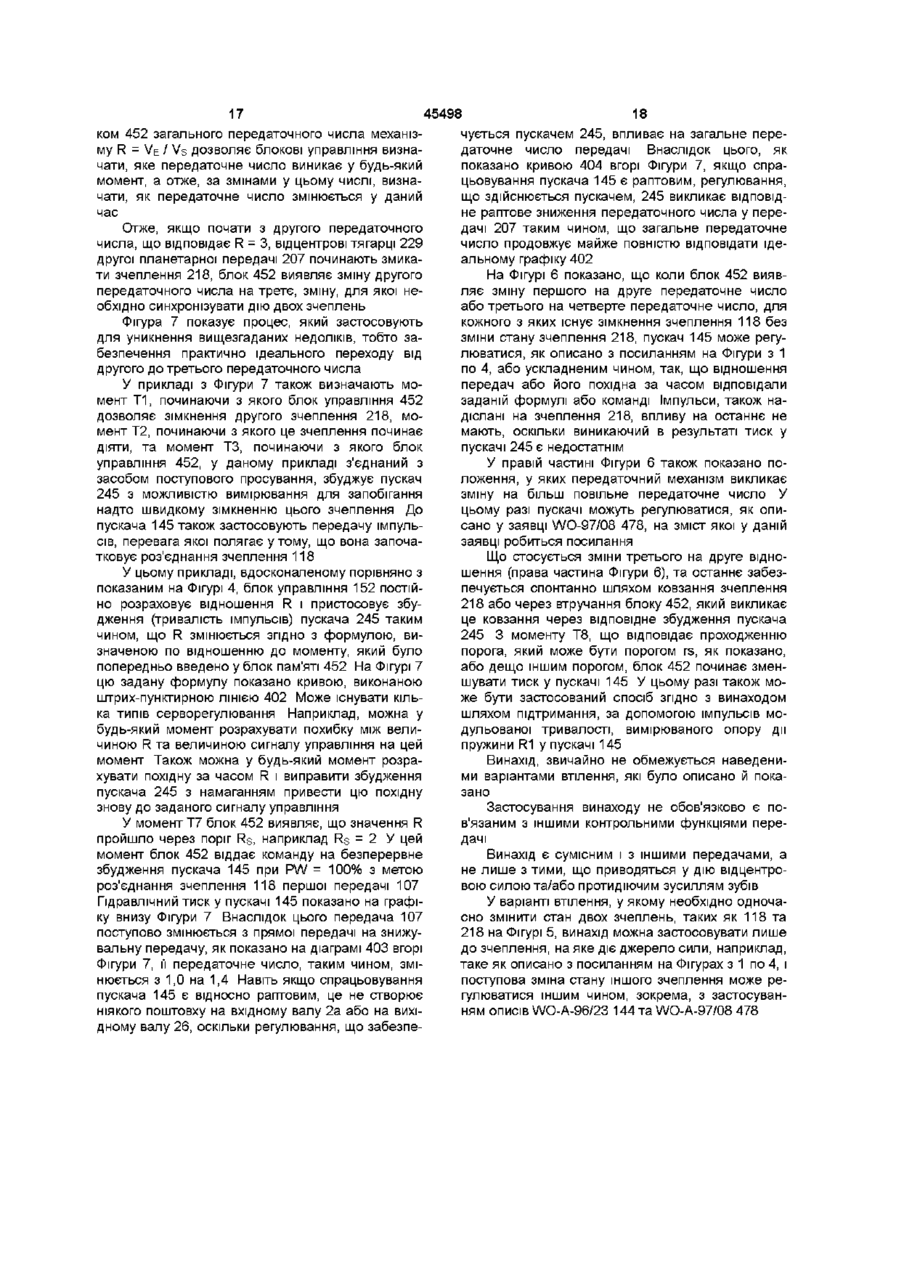
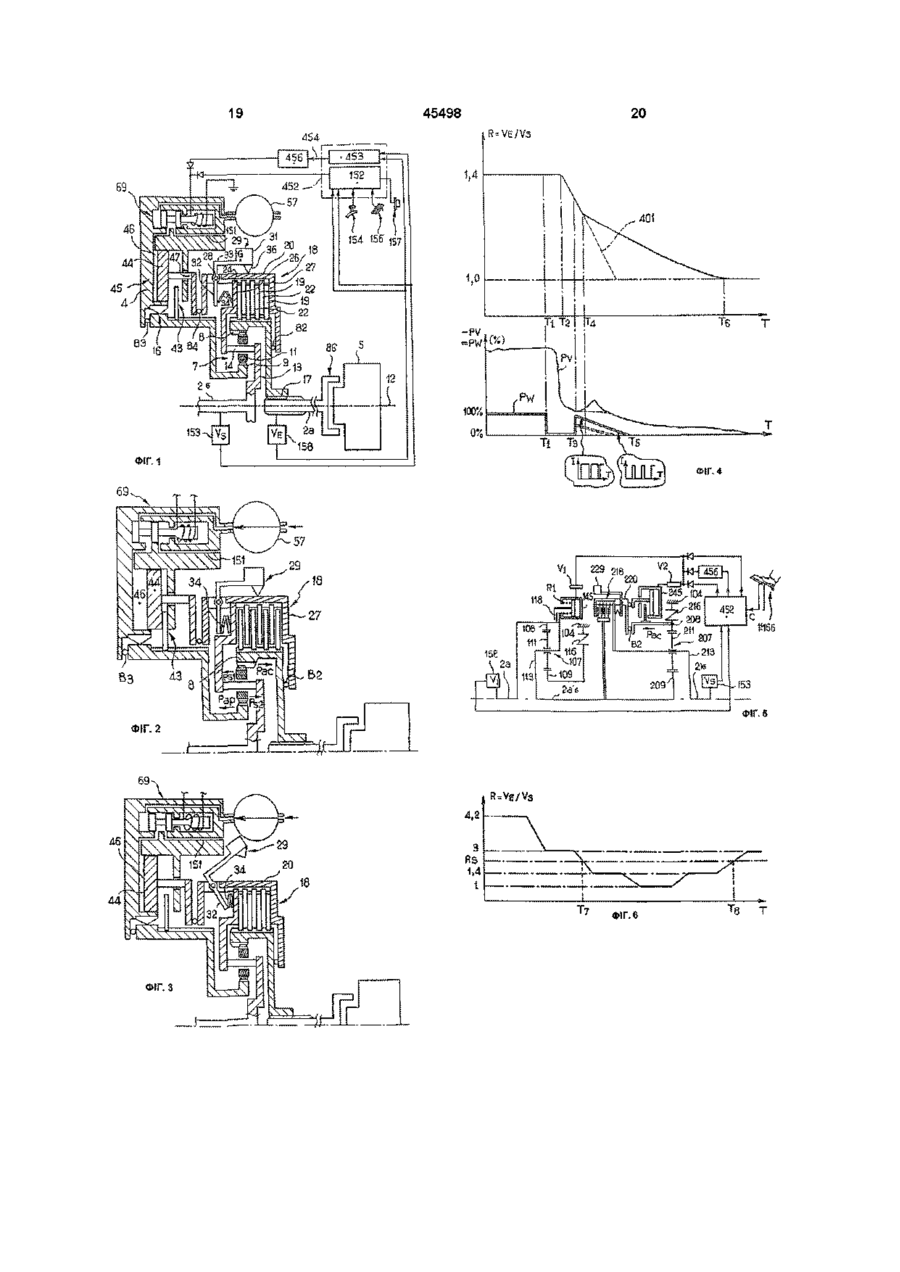
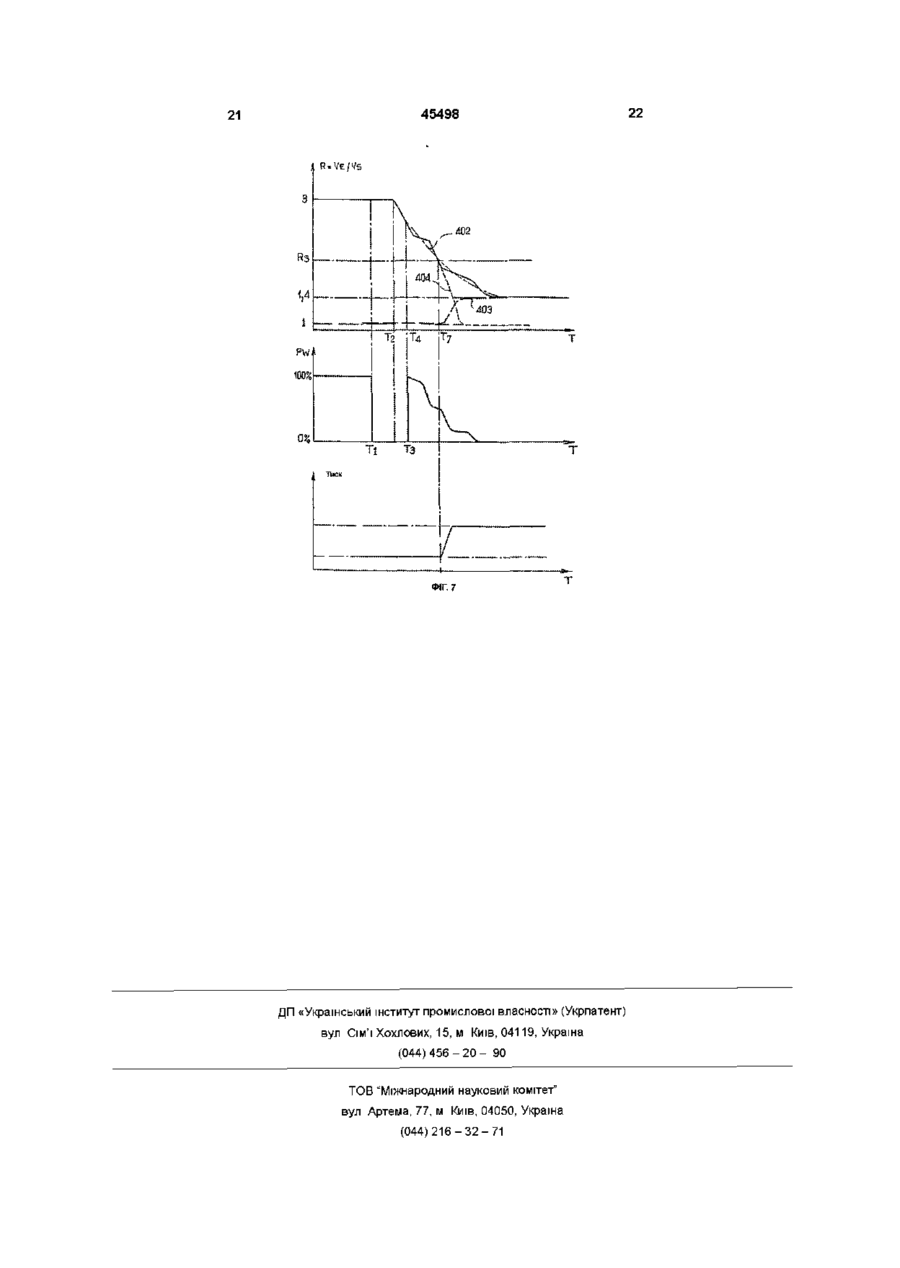
1 Спосіб встановлення поступової зміни з попереднього передаточного числа на нове передаточне число у передаточному механізмі, який включає пристрій для вибіркового сполучення двох ротаційних елементів, практично нерегульовані джерела сили для приведення засобу вибіркового сполучення у заданий стан ковзання або захоплення, що відповідає новому числу, привідний засіб, здатний на приведення засобу вибіркового сполучення в інший з вищезгаданих станів, що відповідає попередньому передаточному числу, який відрізняється тим, що спосіб включає, одночасно з приведенням за допомогою джерела сили засобу вибіркового сполучення у стан, що відповідає новому числу, етап регулювання привідного засобу таким чином, щоб він створював вимірювану супротивну силу, що уповільнює перехід з попереднього передаточного числа на нове передаточне число 2 Спосіб за п 1, який відрізняється тим, що його застосовують до передаточного механізму, привідним засобом якого є пдропривід, та етап регулювання здійснюють шляхом вибіркового сполучення гідравлічної камери пускача з джерелом тиску 3 Спосіб за п 2, який відрізняється тим, що вищезгадану супротивну силу регулюють шляхом чергування фази, при якій гідравлічна камера є з'єднаною зі спускним каналом, і фази, під час якої гідравлічна камера є з'єднаною з джерелом тиску 4 Спосіб за одним з пп з 1 по 3, який відрізняється тим, що пускач збуджують за допомогою імпульсів 5 Спосіб за п 4, який відрізняється тим, що силу регулюють шляхом регулювання тривалості імпу льсів 6 Спосіб за одним з пп з 1 по 5, який відрізняється тим, що до привідного засобу застосовують збудження, яке знижують, починаючи з максимального, згідно з заданим графіком зниження 7 Спосіб за п 6, який відрізняється тим, що існує розрахована фізична величина, на яку впливають поступова зміна попереднього передаточного числа на нове передаточне число, та тим, що привідний засіб регулюють залежно від результату цього виявлення 8 Спосіб за п 7, який відрізняється тим, що як фізичну величину розраховують принаймні одну швидкість обертання та порівнюють її з іншою швидкістю обертання, по відношенню до якої вона змінюється під час процесу зміни передаточного числа 9 Спосіб за п 7 або 8, який відрізняється тим, що супротивну силу регулюють згідно з різницею між реальною величиною, одержаною шляхом розрахунку фізичної величини, та командною величиною під час процесу зміни передаточного числа 10 Спосіб за одним з пп з 7 по 9, який відрізняється тим, що іншу зміну стану у передаточному механізмі регулюють згідно з розрахованою фізичною величиною 11 Спосіб за п 10, який відрізняється тим, що регулювання іншої зміни стану охоплює початок вищезгаданої іншої зміни стану, коли фізична величина пройшла заданий поріг 12 Спосіб за п 10 або 11, який характеризується визначенням, чи є вищезгадана інша зміна стану необхідною згідно з діапазоном величин, у якому фізична величина змінюється під час зміни передаточного числа 13 Спосіб за одним з пп з 7 по 12, який відрізняється тим, що як фізичну величину розраховують вхідну швидкість передаточного механізму, порівнюючи з вихідною швидкістю передаточного механізму 14 Спосіб за одним з пп з 1 по 13, який відрізняється тим, що під час процесу зміни передаточного числа джерело сили не зазнає безпосереднього регулювання 15 Спосіб за одним з пп з 1 по 14, який відрізняється тим, що його застосовують до передаточно О 00 ю 45498 го механізму, у якому джерело сили належить до відцентрового типу 16 Спосіб за одним з пп з 1 по 15, який відрізняється тим, що привідний засіб діє утому ж самому напрямі на пристрій вибіркового сполучення як сила, що виникає пропорційно крутному моменту, переданому на передаточний механізм 17 Передаточний механізм для транспортного засобу, який включає принаймні одну зубчасту передачу, засіб вибіркового сполучення, здатний шляхом зміни попереднього стану сполучення на новий забезпечувати зміну зубчастої передачі з попереднього передаточного числа на нове передаточне число, практично нерегульоване джерело сили, здатне викликати зміну у засобі вибіркового сполучення з попереднього сполучення на нове сполучення, привідний засіб, здатний на застосування до засобу вибіркового сполучення дії, спрямованої на приведення його у попередній стан сполучення, блок управління для регулювання привідного засобу, який відрізняється тим, що блок управління включає засіб поступового просування для забезпечення прикладення привідним засобом сили вимірюваної величини, що уповільнює зміну засобу вибіркового сполучення зі стану попереднього сполучення на стан нового сполучення під дією джерела сили 18 Передаточний механізм за п 17, який відрізняється тим, що пускач є пдроприводом, і тим, що засіб поступового просування сконструйовано таким чином, що він чергує фазу зниження тиску та фазу застосування тиску до робочої камери пускача 19 Передаточний механізм за п 18, який відрізняється тим, що спускний канал пускача є гідравлічно стійким 20 Передаточний механізм за одним з пп з 17 по 19, який відрізняється тим, що засіб поступового просування сконструйовано так, щоб він створював імпульси, що надсилаються принаймні непрямо на привідний засіб 21 Передаточний механізм за п 20, який відрізняється тим, що імпульси мають різну тривалість 22 Передаточний механізм за п 20 або 21, який відрізняється тим, що засіб поступового просування здатний безперервно вибірково надсилати імпульси постійної тривалості, меншої за 100%, з метою забезпечення створення пускачем сили, яка коректує спонтанну зміну умов передаточного числа у передаточному механізмі 23 Передаточний механізм за одним з пп з 17 по 22, який відрізняється тим, що блок управління має вхід, з'єднаний із засобами виявлення фізичної величини, яка здатна зазнавати впливу поступової зміни передаточного числа після її початку 24 Передаточний механізм за п 23, який відріз Даний винахід стосується способу встановлення переключення - або зміни передаточного числа - поступового просування у передаточному механізмі, зокрема, в автоматичному передаточному механізмі з багатьма передаточними чис няється тим, що засоби управління реагують на зміну вищезгаданої фізичної величини з метою врегулювання дії привідного засобу підчас зміни попереднього передаточного числа на нове передаточне число 25 Передаточний механізм за одним з пп 23 або 24, який відрізняється тим, що фізична величина, на яку реагує блок управління, включає вхідну швидкість пристрою у порівнянні з вихідною швидкістю пристрою 26 Передаточний механізм за одним з пп з 23 по 25, який відрізняється тим, що блок управління здійснює серворегулювання зміни фізичної величини відносно командної 27 Передаточний механізм за одним з пп з 23 по 25, який відрізняється тим, що блок управління реагує на зміну фізичної величини з метою започаткування запрограмованого, принаймні непрямого, збудження пускача 28 Передаточний механізм за одним з пп з 23 по 27, який відрізняється тим, що блок управління, крім того, реагує на порогову величину фізичної величини з метою започаткування іншої зміни стану у передаточному механізмі 29 Передаточний механізм за п 28, який відрізняється тим, що включає дві зубчасті передачі, змонтовані послідовно, тим, що сполучний пристрій є зв'язаним з першою зубчастою передачею, у якій перепад між попереднім числом та новим числом є відносно великим, та тим, що вищезгадана інша зміна стану стосується іншої зубчастої передачі для зміни числа в іншому напрямку з меншим перепадом 30 Передаточний механізм за одним з пп з 17 по 29, який відрізняється тим, що джерелом сили є відцентрові пристрої 31 Передаточний механізм за одним з пп з 17 по 30, який відрізняється тим, що привідний засіб є змонтованим таким чином, щоб діяти спільно з пристроєм вибіркового сполучення у тому ж самому напрямі, що й автоматичний блок управління, що створює силу, представлену крутним моментом, переданим у передаточному механізмі 32 Передаточний механізм за п 31, який відрізняється тим, що автоматичний блок управління є засобом передачі на пристрій вибіркового сполучення сили зубчастої реакції у зубчастій передачі 33 Передаточний механізм за одним з пп з ЗО по 32, який відрізняється тим, що стан попереднього сполучення є вільним станом, у якому обертальний крутний момент передається зубчастою передачею, і стан нового сполучення є станом цього зчеплення, у якому, з точки зору передачі крутного моменту, зубчаста передача є короткозамкненим пристроєм вибіркового сполучення лами Даний винахід також стосується передаточного механізму, у якому втілюється цей спосіб З заявки WO-A-9207206 вже відома автоматична передача, у якій зчеплення вибірково з'єднує 45498 два ротаційні елементи диференціала, такого як зубчаста передача, залежно від того, яка з двох протидіючих сил домінує Перша сила, спрямована на роз'єднання зчеплення, є, наприклад, зубчастою реакцією, точніше, осьовим тиском, створеним зубами косозубого зубчастого зачеплення, закріпленими з можливістю руху в осьовому напрямі Друга сила, спрямована на зімкнення зчеплення, може бути створена пружинами та/або тахометричними відцентровими засобами Коли зчеплення роз'єднується, необхідно запобігти обертанню третього роторного елемента диференціала, і це можна забезпечити муфтою вільного ходу, яка запобігає обертанню третього елемента у зворотному напрямку Цей тип передачі є дуже вигідним, оскільки його принцип дії не вимагає ні зовнішнього джерела живлення, ні датчиків, ні схеми управління Сам передаточний механізм створює сили, які його контролюють, і ці сили водночас є виміром параметрів, необхідних для контролю Для сучасних коробок передач, які мають забезпечувати високий рівень зручності й оптимізувати роботу, вищезгадані сили вигідно доповнюються додатковими силами, створеними, наприклад, пдроприводами Додаткові сили можуть служити для довільної зміни швидкості та умов крутного моменту, за яких передача змінює передаточне число, або може зафіксувати передачу з даним передаточним числом, якщо у цьому є потреба (PCT/FR 94/00 176) З іншого боку, згідно з винаходом було помічено, що процес переключення під дією таких сил, як відцентрова сила або зубчаста реакція, може виявляти певні недоліки WO-A-97/08 478 пропонує, рішення, спрямовані на подолання певних типів недоліків Один з недоліків, яких стосується даний винахід, є жорсткість, яка може бути пов'язана з дією нерегульованого джерела сили, такого як пружинне, або, ще більше - джерела відцентрової сили, зокрема, у разі вищезгаданих передач, коли протидіюча сила зникає і раптово вивільнює джерело сили Наприклад, якщо протидіюча сила є пропорційною крутному моментові, що передається, і останній зникає, коли водій відпускає педаль акселератора, нерегульоване джерело сили може раптово привести у дію зчеплення й спричинити небезпечний і незручний поштовх Задача даного винаходу полягає у забезпеченні поліпшеного контролю над процесом переключення, включаючи приведення у дію принаймні одного засобу вибіркового сполучення Згідно З винаходом, спосіб встановлення поступової зміни попереднього передаточного числа на нове передаточне число у передаточному механізмі, який включає - пристрій для вибіркового сполучення двох ротаційних елементів, - джерело сили для приведення засобу вибіркового сполучення у заданий стан ковзання або захоплення, що відповідає новому передаточному числу, - приводний засіб, здатний приводити засіб вибіркового сполучення в інший із зазначених станів, що відповідає попередньому передаточному числу, і характеризується тим, що спосіб охоплює, одночасно з приведенням за допомогою джерела сили засобу вибіркового сполучення у стан, що відповідає новому передаточному числу, етап регулювання приводного засобу таким чином, щоб він створював вимірювану супротивну силу, що уповільнює перехід з попереднього передаточного числа на нове За допомогою приводного засобу, дія джерела сили врівноважується з можливістю вимірювання, систематично або лише у разі необхідності, з метою запобігання викликанню джерелом сили різких змін у пристрої вибіркового сполучення Величина протидіючої сили, що прикладається приводним засобом, може бути або заданою спеціальною величиною, або величиною, вибраною з ряду заданих величин, причому вибір роблять згідно з критерієм відбору, наприклад, швидкістю обертання, що визначає відцентровий ефект, якщо джерело сили належить до відцентрового типу Така задана величина в оптимальному варіанті складається з сили, що поступово послаблюється і, таким чином, поступово дозволяє джерелу сили приводити засіб вибіркового сполучення у новий стан сполучення В оптимальному варіанті визначають фізичну величину, і ця величина є величиною, на яку впливає поступова зміна попереднього передаточного числа на нове передаточне число, і приводний засіб регулюють залежно від одержаного результату У разі передачі, коли переключення відбуваються спонтанно, тобто без втручання процесора і, наприклад, відбуваються згідно з напрямком та величиною результуючої різних сил, таких як відцентрова сплата сила зубчастої реакції, що вказує на переданий крутний момент, визначення вищезгаданої фізичної величини є виявленням того, що у передачі відбувається поступова зміна передаточного числа Врівноваження приводного засобу розпочинають, принаймні, у певних випадках, згідно з цим визначенням Крім того, визначення фізичної величини можуть застосовувати для забезпечення серворегулювання поступового просування Можна, наприклад, розрахувати похідну передаточного числа за часом і регулювати врівноваження таким чином, щоб ця похідна залишалася якомога ближчою до вихідної величини Можна вибрати ВИХІДНІ величини, ВІДМІННІ від похідної Наприклад, можна застосувати формулу розрахунку відношення за часом як вихідну величину Якщо передача забезпечує передаточне число, яке є великим порівняно з передаточним числом застосовуваних зубчастих передач, існує в цілому принаймні один процес переключення, який вимагає приведення у дію одного сполучення та роз'єднання іншого сполучення, водночас чітко синхронізуючи ці дві операції Будь-який недолік у цій синхронізації викликає зміну передаточного числа, незручну для тих, хто перебуває у машині, і виявляє себе в ударах та/або поштовхах, які спричинюють зношування передачі Засіб вибіркового сполучення, який започатковує процес переключення, може у такому разі бути 8 45498 засобом вибіркового сполучення, який врівновахарактеризується тим, що блок управління жується, як щойно було описано, і цей засіб вибірвключає засіб поступового просування, що викликового сполучення може бути засобом, приведенкає прикладення приводним засобом сили виміня якого у дію регулює вхідна швидкість рюваної величини, яка уповільнює зміну засобу передаточного механізму, що відповідає ЗМІНІ певибіркового сполучення зі стану попереднього редаточного числа, яке має бути змінене Коли сполучення на стан нового сполучення під дією виявлена фізична величина досягає певного зададжерела сили ного рівня, у свою чергу приводиться в дію інший У решті цього опису, згідно з умовними термісполучний засіб нами, передаточне число називається "повільним", якщо воно відповідає високій ВХІДНІЙ ШВИДЯк фізичну величину, яка характеризує розраКОСТІ по відношенню до вихідної швидкості У хунок процесу зміни відношення, дійсно краще протилежному разі передаточне число називаєтьвибрати вхідну швидкість або співвідношення вхіся "швидким" дної швидкості та вихідної швидкостей передачі або, як це робиться зазвичай, двох швидкостей, на Інші особливості та переваги винаходу стануть відношення яких впливає конкретний процес перезрозумілими з нижчеподаного опису, який стосуключення ється прикладів, що не вичерпують повного обсягу даного винаходу У такому разі контроль поступового просування, який регулює врівноваження, що забезпечуНа фігурах, що додаються ється приводним засобом залежно від розрахова- Фігура 1 є схематичним зображенням у поного загального передаточного числа двох довжньому розрізі передаточного механізму з механізмів передачі, дозволяє компенсувати усі двома передаточними числами згідно з винаходом недоліки процесу зміни передаточного числа у у ВИХІДНІЙ позиції, двох механізмах Загальний результат, таким чи- Фігури 2 та 3 є видами, подібними до Фігури 1 ном, має бути дуже задовільним, незважаючи на але стосуються функціонування як знижувальної складність застосованого процесу переключення передачі, так і прямої передачі, ВІДПОВІДНО, Ще одна перевага вибору як фізичної величи- Фігура 4 є діаграмою з часовим критерієм, на ни, яка вказує на стан передаточного механізму в якій показано варіант способу згідно з винаходом, цілому, а не лише стану зазначеного вузла, такого - Фігура 5 є схематичним зображенням переяк зубчаста передача у передаточному механізмі, даточного механізму з чотирма передаточними який охоплює кілька з них, зокрема, вибору як фічислами згідно з винаходом, і зичної величини співвідношення вхідної швидкості - Фігури 6 та 7 є діаграмами з часовим критеріта вихідної швидкості у передачі, є те, що ця велиєм, які пояснюють функціонування варіанту втічина вказує, згідно з діапазоном величин, у якому лення, показаного на Фігурі 5 и у даний момент регулюють, яка саме зміна відПередаточний механізм з двома передаточношення у даний момент відбувається Наприними числами, показаний на Фігурі 1, призначений, клад, у пристрої, який забезпечує чотири передазокрема, для автотранспортного засобу, охоплює точні числа з лише двома послідовними вхідний вал 2а та вихідний вал 26, відцентровані зубчастими механізмами, існують три можливі зміуздовж осі 12 пристрою Вхідний вал 2а є з'єднани, тобто першого на друге передаточне число, ним з вихідним валом двигуна 5 автотранспортнотретього на четверте передаточне число, третього го засобу через розташоване між ними вхідне зчена друге передаточне число, які охоплюють зімкплення 86 та ІНШІ можливі засоби передачі, які не нення того ж самого зчеплення На основі загальпоказано Вихідний вал 26 призначений для приного виявлення можна визначити, яка зі змін відведення у рух, прямо або опосередковано, привобувається, і, якщо необхідно, ВІДПОВІДНИМ чином дних коліс транспортного засобу Між вихідним змінити критерії регулювання Крім того, загальне валом 26 та колесами транспортного засобу може визначення дозволяє застосовувати один індикарозташовуватися, наприклад, інший передаточний тор для усіх засобів вибіркового сполучення, для механізм з двома або кількома передаточними яких бажано застосовувати спосіб згідно з винахочислами та/або регульований вручну інвертор педом реднього приводу/заднього приводу та/або диференціал для розподілу руху між приводними колеЗгідно З другим аспектом винаходу, передатосами транспортного засобу чний механізм для транспортного засобу, який включає - принаймні одну зубчасту передачу, - засіб вибіркового сполучення, здатний шляхом зміни попереднього стану сполучення на новий, викликати зміну зубчастої передачі з попереднього передаточного числа на нове передаточне число, - джерело сили, здатне викликати зміну засобу вибіркового сполучення зі стану попереднього сполучення на стан нового сполучення, - приводний засіб, здатний на застосування до засобу вибіркового сполучення дії, спрямованої на приведення його у стан попереднього сполучення, - блок управління для регулювання приводного засобу, Вхідний 2а та вихідний 26 вали є подовжньо зафіксованими відносно кожуха 4 передаточного механізму, який показано лише частково Передаточний механізм охоплює диференціал, утворений зубчастою передачею 7 Передача 7 охоплює обід 8 з внутрішніми зубами та сонячну шестірню 9 з ЗОВНІШНІМИ зубами, обидві зачіплюються з сателітами 11, що підтримуються з однаковими кутовими інтервалами навколо осі 12 передаточного механізму, ексцентричними цапфами 14 тримача сателітів 13, жорстко з'єднаного з вихідним валом 26 Сонячна шестірня 9 може вільно обертатися навколо осі 12 передаточного механізму по відношенню до вихідного валу 26, який вона оточує Однак муфта вільного ходу 16 запобігає 45498 10 обертанню сонячної шестірні 9 у зворотному, тобвхає рухому пластину 27 за допомогою натискного то у протилежному до нормального, напрямку підшипника зчеплення В2 у напрямку, що відокреобертання вхідного валу 2а по відношенню до комлює пластини 26 та 27 і, таким чином, роз'єднує жуха 4 передачі зчеплення 18 Сила РАС також спрямована на зближення носової частини 32 відцентрових тягаВедена шестірня головної передачі 8 є з'єднарців 29 та утримуючої пластини 26, і, таким чином, ною для спільного обертання з вхідним валом 2а, на утримання відцентрових тягарців 29 у їх ВИХІДале з можливістю подовжнього ковзання по відноНІЙ позиції і на стискання тарілчастої пружини 34 шенню до нього, через пази 17 Сателіти 11, які зачіплюються не лише з веденою Багатодискове зчеплення 18 вибірково сполушестірнею головної передачі 8, алей із сонячною чає ведену шестірню головної передачі 8 з тримашестірнею 9, зазнають дії двох протилежних сил чем сателітів 13 PS1 та PS2, які врівноважуються, а сонячна шестіКомплект дисків 19 та 22 зчеплення 18 може рня 9 зазнає, зважаючи на и зачеплення з сателібути подовжньо стиснутий між утримуючою пластами 11, осьового тиску Рар, який рівний за інтентиною 26, яка утворює одне ціле з тримачем сатесивністю і є протилежним осьовому тискові Рар літів 13, та рухомою пластиною 27, яка є частиною веденої шестірні головної передачі 8 Осьове накорпусу 20, що є зв'язаним для спільного обертанвантаження Рар сонячної шестірні 9 передається ня з тримачем сателітів 13, але може ковзатися по на кожух 4 за допомогою натискного підшипника відношенню до останнього зчеплення ВЗ Корпус 20 підтримує відцентрові тягарці 29, розташовані кільцем навколо зчеплення 18 ВідЦе положення показано на Фігурі 2 Якщо прицентрові тягарці, таким чином, є зв'язаними для пустити, що цієї позиції досягнуто, тепер можна спільного обертання з вихідним валом 26 передаописати принцип дії передаточного механізму точного механізму Доки крутний момент, що передається вхідним валом 2а, є таким, що осьовий тиск РАС У веденій Обертання тримача сателітів 13 спрямоване шестірні головної передачі 8 є достатнім для стисна радіальне повертання назовні тіла 31 кожного кання тарілчастої пружини 34 та утримання відцевідцентрового тягарця 29 навколо його тангенціантрових тягарців 29 у ВИХІДНІЙ ПОЗИЦІЇ, показаній на льної поворотної осі 28 під дією відцентрової сили Фігурі 2, відокремлення утримуючої пластини 26 з метою викликання руху відцентрових тягарців з від рухомої пластини 27 зчеплення є таким, що вихідної позиції, визначеної приляганням упору 36 диски 19 та 22 ковзають один по одному без перевідцентрових тягарців до корпусу 20 (Фігури 1 та 2) дачі крутного моменту між ними У цьому разі воу позицію відриву, яку можна побачити на Фігурі З дило сателітів 13 може обертатися зі швидкістю, В результаті забезпечується відносний поВІДМІННОЮ від швидкості вхідного валу 2а, і воно довжній зсув між носовою частиною 32 кожного спиняється через навантаження, яке має приводивідцентрового тягарця та поворотною віссю 28 ти у дію вихідний вал 26 Результатом цього є те, відцентрового тягарця Цей зсув, який рухає носощо сателіти 11 намагаються діяти як реверсори ву частину 32 у напрямку рухомої пластини 27, руху, тобто, забезпечувати обертання сонячної може відповідати стисненню тарілчастої пружини шестірні 9 у напрямку, протилежному обертанню 34, розташованої між носовою частиною 32 та веденої шестірні головної передачі 8 Але цьому утримуючою пластиною 26 та/або зсуву рухомої перешкоджає муфта вільного ходу 16 Сонячна пластини 27 у напрямку стаціонарної пластини 26 шестірня 9, таким чином, спиняється муфтою віу напрямі стискання зчеплення 18 льного ходу 16, а водило сателітів 13 обертається Коли передаточний механізм перебуває у ВИна швидкості, середній між нульовою швидкістю ХІДНІЙ позиції, як показано, на Фігурі 1, тарілчаста сонячної шестірні 9 і швидкістю веденої шестірні пружина 34 передає на корпус 20, за допомогою головної передачі 8 та вхідного валу 2а Модуль, відцентрових тягарців, що лежать у ВИХІДНІЙ ПОЗИтаким чином, діє як знижувальна передача Якщо ЦІЇ, силу, яка змикає зчеплення 18 таким чином, швидкість обертання зростає, а крутний момент що вхід 2а передаточного механізму з'єднується в залишається незмінним, то відцентрова сила відобертанні з виходом 26, і передаточний механізм центрових тягарців 29 справляє на рухому пластиявляє собою пряму передачу, здатну передавати ну 27 по відношенню до утримуючої пластини 26 крутний момент до певного максимального знаосьове зусилля затискання, яке є більшим за чення, що визначається зусиллям затискання таосьовий тиск РАС, І рухома пластина 27 проштоврілчастої пружини хується у напрямку пластини 26 з метою забезпеКрім того, зуби веденої шестірні головної печення прямої передачі (Фігура 3) редачі 8, сателітів 11 та сонячної шестірні 9 належать до гвинтового типу Таким чином, у кожній Зчеплення 18, будучи замкненим під час перепарі зубчастих передач, які зачіплюються під наключення на пряму передачу, зі зростанням перевантаженням, виникають аксіальні протилежні дає енергію безпосередньо від веденої шестірні осьові навантаження, пропорційні переданій кільголовної передачі 8, зв'язаної з вхідним валом 2а, цевій силі, а отже, й крупному моментові на вхідна водило сателітів 13, зв'язане з вихідним валом ному валу 2а та крутному моментові на вихідному 26 Отже, зуби зубчастої передачі 7 працюють зі валу 26 Напрямок гвинтового нахилу зубів зубчаспаданням, тобто вони передають силу, яка постої передачі вибирають таким, щоб осьовий тиск ступово спадає Осьовий тиск РАС знижується і РАС (Фігура 2), що виникає у веденій шестірні голонарешті зникає Таким чином, осьовий тиск, завдявної передачі 8, коли вона передає крутний моки відцентровій силі, може прикладатися повністю, мент на валу привода, прикладається у напрямку, з метою притискання пластин 26 та 27 одна до у якому ведена шестірня головної передачі 8 штоодної 11 45498 12 Швидкість обертання вихідного валу 26 може ноі передачі, коли водій бажає збільшити гальмівзнизитися, і/або крутний момент, який має бути ну дію двигуна, наприклад, при русі по схилу або переданий, може зрости до такої точки, коли відколи він бажає збільшити крутний момент двигуна центрові тягарці 29 перестають забезпечувати у на вихідному валу 26 Якщо крутний момент є зчепленні 18 зусилля затискання, достатнє для обертальним моментом, гальмо 43 при зімкненні передачі крутного моменту У цьому разі зчепленкрутінням муфти вільного ходу 16 здійснює зайву ня 18 починає зсуватися Швидкість сонячної шесроботу, але це не завдає шкоди тірні 9 знижується, доки не десяте нульового знаПодачу та зливання масла з камери 46 визначення Муфта вільного ходу 16 спиняє сонячну чають за станом електроклапана 69 Коли вона шестірню, і знову виникає осьовий тиск зуба РАС перебуває у ВИХІДНІЙ позиції, електроклапан 69 для роз'єднання зчеплення, і передаточний меха(Фігури 1 та 3) з'єднує камеру 46 зі спускним кананізм у такому разі діє як знижувальна передача лом 151, який є гідравлічне стійким Коли електТаким чином, щоразу, коли відбувається зміна роклапан 69 є під'єднаним до джерела електричзнижувальної передачі на пряму передачу або ного живлення (Фігура 2), він ізолює камеру 46 від навпаки, осьове зусилля РАС ЗМІНЮЄТЬСЯ ДЛЯ стаспускного каналу 151 і з'єднує її з виходом насоса білізації нового передаточного числа Це є дуже 57, що приводиться у дію двигуном 5 Незалежно вигідним, з одного боку, для запобігання надмірно від стану електроклапана 69, насос 57 також може частим змінам передаточного числа у певних крислужити для живлення мастильної схеми (не покатичних робочих точках, а з іншого боку - для того, зано) передаточного механізму щоб положення, у якому зчеплення 18 ковзається, Електроклапан 69 регулюють через засоби було лише тимчасовим управління 452, які включають блок управління 152, з'єднаний з детектором 153 швидкості Vs виЯк показано на Фігурі 1, передбачено додаткохідного валу 26, детектор 158 швидкості VE ВХІДНОві засоби для вибіркового функціонування передаГО валу 2а, селектор ручного-автоматичного реточного механізму як знижувальної передачі в жимів 154, які є у розпорядженні водія, детектор умовах, ВІДМІННИХ від тих, що визначаються осьопозиції педалі акселератора 156 та селектор норвими зусиллями тарілчастої пружини 34, відцентмального - спортивного режимів 157, що дозволяє рових тягарців 29 та зубів веденої шестірні голоВОДІЄВІ вибирати між двома різними автоматичнивної передачі 8 ми режимами роботи передаточного механізму Для цього передаточний механізм включає гальмо 43, яке дозволяє спиняти сонячну шестірню 9 Блок управління 152 контролює співвідношенпо відношенню до кожуха 4 незалежно від муфти ня між вхідною швидкістю VE та вихідною швидкісвільного ходу 16 Іншими словами, гальмо 43 фунтю Vs Якщо пристрій працює як знижувальна пекціонально є закріпленим паралельно муфті вільредача (положення, показане на Фігурі 2), це ного ходу 16 між сонячною шестірнею 9 та кожуспіввідношення становить приблизно 1,4 Якщо хом 4 Поршень 44 пдроприводу 43 є закріпленим вхідна швидкість VE знижується по відношенню до з можливістю подовжнього ковзання для вибірковихідної швидкості Vs, то причина цього полягає вого зімкнення та розімкнення гальма 43 Гальмо утому, що відцентрові тягарці 29 почали змикати зчеплення 18, а отже, передаточний механізм спо43 та поршень 44 мають кільцеву форму і за вісь нтанно переключився на пряму передачу У цьому мають вісь 12 передаточного механізму Поршень разі для забезпечення поступового просування 44 прилягає до гідравлічної камери 46, у яку може цього процесу, точніше, для забезпечення певної бути вибірково подане стиснуте масло з метою тривалості ковзання дисків 19 та 22 зчеплення, приведення у рух поршня у напрямку зімкнення засоби управління 452, якими було виявлено знигальма 43 ження VE ПО відношенню до Vs, регулює живлення Крім того, поршень 44 є жорстко з'єднаним зі камери 46 таким чином, що поршень 44 штовхає штоком штовхача 47, який може притискатися до корпус 20 у напрямку роз'єднання зчеплення 18 корпусу 20 за допомогою натискного підшипника для уповільнення процесу зчеплення, що веде до зчеплення В4 Зібраний агрегат є таким, що коли положення, показаного на Фігурі 3 На практиці тиск, який існує всередині камери 46, штовхає побажано, щоб засоби управління 452 якомога швиршень 44 у позицію зімкнення гальма 43, корпус 20 дше викликали початок дії поршня 44 Якщо зваще до зімкнення гальма 43 проштовхується назад жити на затримку виявлення та неминучу інерційна відстань, достатню для роз'єднання зчеплення ність, ця дія розпочинається, коли відношення VE/ 18 Vs стає нижчим, ніж приблизно 1,3 Таким чином, коли поршень 44 перебуває у позиції зімкнення гальма (Фігура 2), сонячна шесУ показаному прикладі засоби управління 452 тірня 9 є нерухомою, навіть якщо тримач сателітів включають, крім блоку управління 152, засіб по13 намагається обертатися швидше за ведену ступового просування 453, який також приймає шестірню головної передачі 8, як при гальмуванні сигнали VE та Vs, постійно розраховує передаточдвигуна, а отже, модуль діє як знижувальна перене число, виявляє зміни у відношенні VE / Vs в редача, яку можна здійснювати завдяки роз'єднанню зультаті початку зімкнення зчеплення 18 і вибіркозчеплення 18 во створює на виході 454 сигнал управління, який створює модульоване збудження електроклапана Зібраний агрегат 43, 44, 46, 47, який щойно 69 таким чином, щоб було подано живлення на був описаний, являє собою приводний засіб, який пускач 45, як щойно було описано може бути у розпорядженні водія транспортного засобу для забезпечення переходу модуля на фуСпосіб згідно з винаходом точніше описується нкціонування як знижувальної передачі або для з посиланням на Фігуру 4 збереження функціонування у режимі знижувальНа цій Фігурі верхній графік показує розраху 13 45498 нок передаточного числа R = VE/ VS, (вертикальна вісь) В залежності від часу Т (горизонтальна вісь) Нижній графік показує, у тому ж самому масштабі часу Т, рівень збудження (подвійна ЛІНІЯ на фігурі) обмотки електроклапана 69 та рівень тиску PV (одиночна ЛІНІЯ) у камері 46 Згідно З оптимальною характеристикою, застосованою у цьому прикладі, інтенсивність врівноважуючого ефекту, який забезпечується пускачем 45, регулюють засобом поступового просування блоку 453 шляхом зміни тривалості PW електричних імпульсів, прикладених до електроклапана 69 Для цього сигнал на виході 454 подають на генератор імпульсів 456, вихід якого 457 подає імпульси на електроклапан 69 Тривалість PW імпульсів може становити від 0% (повна відсутність імпульсів) до 100%, що відповідає безперервній роботі Нижній графік на Фігурі 4 показує розрахунок тривалості імпульсів в залежності від часу, виражений у % Детальний розгляд показує, що високий відсоток відповідає великій тривалості імпульсу, а низький відсоток відповідає малій тривалості імпульсу Частота повторення імпульсів є постійною і може, наприклад, становити 50Гц Амплітуда імпульсів за межами періодів ВІДСІЧКИ Є також постійною, наприклад, 12В У показаному прикладі передаточне число спочатку дорівнює 1,4 До часу Ті функціонування як знижувальної передачі забезпечується пускачем 45, оскільки тривалість імпульсів, надісланих на електроклапан 69, становить 100% У цьому разі вони являють собою безперервний сигнал, який подається блоком управління 152 Пускач 45 сконструйовано таким чином, що він здатен подолати відцентрову силу, створену відцентровими тягарцями 29, навіть за відсутності протидіючого зусилля зубів Рдс ДЛЯ усіх швидкостей, які можуть бути застосовані на практиці Наприклад, якщо вважають, що максимальна швидкість Vs, для якої у певних випадках може бути необхідним функціонування як знижувальної передачі, становить 3000об/хв, сила пускача 45, коли тривалість імпульсу є безперервною 100%, принаймні дорівнює силі, створеній відцентровим ефектом на носових частинах 32 відцентрових тягарців, коли корпус 20 обертається зі швидкістю 3000об/хв Функціонування як знижувальної передачі триває протягом певного часу, до часу Тг, при якому передаточне число раптово починає знижуватися Тривалість Т1-Т2 може бути дуже короткою, якщо з моменту припинення живлення пускача 45 осьове зусилля, створене відцентровими тягарцями 29, є більшим за протидіюче зусилля РАС Тривалість Т1-Т2 може бути довшою у протилежному разі, і внаслідок цього необхідно очікувати дисбалансу між силою, створеною відцентровими тягарцями 29, та протидіючим зусиллям зубів РАС ДЛЯ ТОГО, щоб розпочати зміну напрямку У будь-якому разі, засіб поступового просування 453, який постійно розраховує відношення R = VE / Vs, дещо пізніше часу І2 виявляє, що зміна знижувальної передачі на пряму передачу розпочалася Засіб 453, таким чином, викликає з часу Тз до часу Ts задане збудження пускача 45 з метою уповільнення процесу зміни до прямої передачі шляхом врівноваження, з 14 можливістю вимірювання, сили створеної відцентровими тягарцями 29 Оскільки пускач 45 здатен утримувати зчеплення 18 роз'єднаним проти дії відцентрових тягарців 29 навіть за відсутності будь-якого протидіючого зусилля зубів РАС, тривале збудження пускача 45 при PW = 100% має ефект не уповільнення зміни на пряму передачу, а, у більшості випадків, повного її запобігання та викликання повернення до функціонування як знижувальної передачі У показаному прикладі врегулювання врівноважувального ефекту полягає у надсиланні на електроклапан 69, як показано внизу на Фігурі 4, імпульсу з тривалістю, яка ЛІНІЙНО ЗМІНЮЄТЬСЯ ЗІ 100% до 0%, між моментом Тз та моментом Ts Інтервал часу Т3-Т5 узгоджується з тривалістю, необхідною для нормальної поступової зміни відношень Якщо точніше, ефект імпульсів полягає у викликанні підвищення тиску PV у камері 46 пускача 45 до рівня, який, однак, є значно нижчим за створений тривалістю імпульсу, зафіксованою у значенні 100% (див графік у нижній частині Фігури 4) Під ДІЄЮ імпульсів електроклапан 69 коливається між відкритим станом та закритим станом Коли він з'єднує камеру 46 з насосом 57, у камеру 46 надсилається хвиля стискання Коли електроклапан 69 з'єднує камеру 46 зі спускним каналом 151, гідравлічне стійкий характер цього каналу запобігає негайному розвантаженню камери 46 В результаті це дає врівноважуючу силу, що діє на поршень 44, і ця сила значною мірою модулюється згідно з графіком тривалості імпульсу PW у часі Т, але з певною затримкою Внаслідок цього результуюча сила, що прикладається до зчеплення у напрямі його зімкнення, зростає з дуже низької величини у момент І2 до величини, що дорівнює силі, створеній відцентровими тягарцями, коли через певний час після припинення імпульсів у момент Тб, тиск у камері 46 ліквідується Таким чином, передаточне число, замість раптового падіння уздовж пунктирної лінії 401, показаної на Фігурі 4, знижується поступово від моменту І4 (дещо пізніше моменту Тз), до моменту Тб, після моменту Тб припинення імпульсів Графіки зниження відношення у різних випадках можуть бути дуже різними, залежно, наприклад, від того, чи є зміна передаточного числа зумовленою збільшенням, обов'язково поступовим, швидкості обертання Vs, чи зникненням, яке може бути раптовим, крутного моменту, який має бути переданий У типовому варіанті, як показано на Фігурі 4, графік зниження є схожим на графік зниження тривалості імпульсу PW Поліпшене поступове просування також може бути забезпечене, коли засоби управління 452, залежно від сигналів, які вони приймають на вході, повинні регулювати переключення з прямої передачі на знижувальну передачу за допомогою пускача 45 Для цього замість раптової зміни тривалості імпульсів PW, надісланих на електроклапан 69, з 0% на 100%, електроклапан піддають поступовому підвищенню тривалості PW імпульсів, які на нього надсилають Однак краще було б почати з кількох імпульсів великої тривалості для швидкого запов 15 45498 16 нення камер 46 та швидкого усунення різних зазорегулюється електроклапанами V1 та V2 ВІДПОВІДрів та можливої деформації системи Після цього НО, ЯКІ самі регулюються засобами управління 452 тривалість імпульсів знижують до меншої, а потім Крім того, у разі зчеплення 218, натискний підшипзнову збільшують до рівня 100% ник зчеплення В2 передає осьове зусилля зубів РАС ВІД веденої шестірні головної передачі 208 на Нарешті, згідно з варіантом, показаним пунккорпус 220 у напрямі роз'єднання зчеплення 218 тирною ЛІНІЄЮ на нижньому графіку на Фігурі 4, можна для передачі імпульсів, надісланих на елеБлок 452 приймає на входах сигнали VE та Vs, ктроклапан 69, з метою уповільнення зміни на які надходять з детекторів 158 та 153 ВІДПОВІДНО, а пряму передачу почати з величини PW, нижчої за також сигнал від детектора 156, що вказує на по100%, і вплив на тиск у камері 46 ВІДПОВІДНО знизицію педалі акселератора транспортного засобу, жується що відповідає параметрові навантаження С двигуна транспортного засобу, який може бути виражеУ варіанті втілення, схематично показаному на ний, наприклад, як відсоток від максимального Фігурі 5, передаточний механізм охоплює дві планавантаження нетарні передачі 107, 207, змонтовані послідовно Планетарна передача 107 є подібною до передачі, Передаточний механізм, який щойно було описаної з посиланням на Фігури 1-3 її ведена описано, здатен забезпечити чотири різні передашестірня головної передачі 108 є з'єднаною з вхіточні числа Перше передаточне число, або найдним валом 2а, и сонячна шестірня 109 є з'єднаповільніше, встановлюють, коли два зчеплення ною з кожухом 104 за допомогою муфти вільного 118, 218 є роз'єднаними, а отже, дві планетарні ходу 116, а її тримач сателітів 114, що підтримує передачі 107, 207 функціонують як знижувальні сателіти 111, що зачеплюються з веденою шестірпередачі Передача, таким чином, забезпечує пенею головної передачі 108 та сонячною шестірнею редаточне число, що дорівнює 1,4x3 = 4,2 109, є з'єднаним з вихідним валом 2аб механізму Для функціонування при другому числі зчеп107, який також є вхідним валом механізму 207 лення 118 змикають, а зчеплення 218 роз'єднують Зчеплення 118 дозволяє вибірково сполучати ветаким чином, щоб планетарна передача 107 функдену шестірню головної передачі 108 з тримачем ціонувала як пряма передача, а планетарна пересателітів 114, тобто вхідний вал 2а з проміжним дача 207 - як знижувальна передача, що дає загавалом 2аб з метою досягнення прямої передачі у льне передаточне число у передаточному планетарній передачі 107 Коли зчеплення 118 є механізмі, яке дорівнює З роз'єднаним, планетарна передача 107 функціоДля функціонування при третьому числі застонує як знижувальна передача, сонячна шестірня у совують протилежний порядок, зчеплення 118 такому разі спиняється муфтою вільного ходу 116 роз'єднують, а зчеплення 218 змикають таким чиПередаточне число, що забезпечується такою ном, щоб лише перша планетарна передача 107 планетарною передачею, тобто планетарною пефункціонувала як знижувальна передача Це заредачею з входом на веденій шестірні головної безпечує загальне передаточне число, що дорівпередачі і виходом на тримачі сателітів, становить нює 1,4 приблизно 1,4 Для функціонування при четвертому числі, або найшвидшому, дві передачі 107, 207 функціонують Друга планетарна передача 207 відрізняється як прямі передачі, і загальне передаточне число тим, що и вхідний вал, який складається з проміждорівнює 1 ного валу 2аб, є з'єднаним не з веденою шестірнею головної передачі 208, а з сонячною шестірУ проілюстрованому простому прикладі зміни нею 209, ведена шестірня головної передачі 208 є передаточного числа у першій передачі регулюз'єднаною з кожухом 104 за допомогою муфти віються лише блоком 452 згідно з функціональними льного ходу 216, яка запобігає обертанню веденої параметрами Vs (вихідною швидкістю) та С (навашестірні головної передачі 208 у зворотному нантаження), але можливі й ускладнені варіанти, прямку Вихідний вал 26 є з'єднаним з тримачем коли перша передача, наприклад, є подібною до сателітів 214, що підтримує сателіти 211, кожен з показаної на Фігурах з 1 по З яких зачіплюється з веденою шестірнею головної У цьому передаточному механізмі зміну другопередачі 208 та сонячною шестірнею 209 Зчепго на третє передаточне число важко регулювати, лення 218 дозволяє міцно з'єднувати проміжний оскільки зчеплення 118 має бути роз'єднаним у вал 2аб з вихідним валом 26 з метою досягнення момент, коли має бути зімкнуте зчеплення 218 прямої передачі у другому диференціальному меЯкщо синхронізація цих двох операцій є неповною, ханізмі 207 існує ризик або одночасного роз'єднання двох зчеплень, тобто короткочасного повернення у перше Коли зчеплення 218 є роз'єднаним, механізм передаточне число, можливо, з ризиком надмірної 207 функціонує як знижувальна передача з ведешвидкості двигуна, або одночасного зімкнення ною шестірнею головної передачі 208, зупиненою двох зчеплень, тобто короткочасного положення муфтою вільного ходу 216 Зважаючи на той факт, прямої передачі у всій системі з ризиком несумісщо вхід забезпечується сонячною шестірнею 209, ної швидкості двигуна В обох випадках пасажири а вихід - тримачем сателітів 214, передаточне чивідчувають поштовхи, а води відчувають поштовхи сло, таким чином, як правило, дорівнює З і зазнають надмірного навантаження Крім того, ці Зчеплення 118 та 218 вибірково змикаються за функціональні відхилення, якщо їх допустити, допомогою пружини R1 та, ВІДПОВІДНО, відцентровпливатимуть на функціональні параметри, які вих тягарців 229, що приводяться в обертання сприймаються блоком 452, а це викличе ще більші тримачем сателітів 213, і роз'єднуються проти дії труднощі у процесі переключення пружини R1 та, ВІДПОВІДНО, відцентрових тягарців 229, пускачами А1 та А2 ВІДПОВІДНО, кожен з яких На Фігурі 6 можна бачити, що виявлення бло 17 45498 18 ком 452 загального передаточного числа механізчується пускачем 245, впливає на загальне перему R = VE / Vs дозволяє блокові управління визнадаточне число передачі Внаслідок цього, як чати, яке передаточне число виникає у будь-який показано кривою 404 вгорі Фігури 7, якщо спрамомент, а отже, за змінами у цьому числі, визнацьовування пускача 145 є раптовим, регулювання, чати, як передаточне число змінюється у даний що здійснюється пускачем, 245 викликає відповідчас не раптове зниження передаточного числа у передачі 207 таким чином, що загальне передаточне Отже, якщо почати з другого передаточного число продовжує майже повністю відповідати ідечисла, що відповідає R = 3, відцентрові тягарці 229 альному графіку 402 другої планетарної передачі 207 починають змикати зчеплення 218, блок 452 виявляє зміну другого На Фігурі 6 показано, що коли блок 452 виявпередаточного числа на третє, зміну, для якої неляє зміну першого на друге передаточне число обхідно синхронізувати дію двох зчеплень або третього на четверте передаточне число, для кожного з яких існує зімкнення зчеплення 118 без Фігура 7 показує процес, який застосовують зміни стану зчеплення 218, пускач 145 може регудля уникнення вищезгаданих недоліків, тобто залюватися, як описано з посиланням на Фігури з 1 безпечення практично ідеального переходу від по 4, або ускладненим чином, так, що відношення другого до третього передаточного числа передач або його похідна за часом відповідали У прикладі з Фігури 7 також визначають мозаданій формулі або команді Імпульси, також намент Т1, починаючи з якого блок управління 452 діслані на зчеплення 218, впливу на останнє не дозволяє зімкнення другого зчеплення 218, момають, оскільки виникаючий в результаті тиск у мент Т2, починаючи з якого це зчеплення починає пускачі 245 є недостатнім діяти, та момент ТЗ, починаючи з якого блок управління 452, у даному прикладі з'єднаний з У правій частині Фігури 6 також показано позасобом поступового просування, збуджує пускач ложення, у яких передаточний механізм викликає 245 з можливістю вимірювання для запобігання зміну на більш повільне передаточне число У надто швидкому зімкненню цього зчеплення До цьому разі пускачі можуть регулюватися, як опипускача 145 також застосовують передачу імпульсано у заявці WO-97/08 478, на зміст якої у даній сів, перевага якої полягає утому, що вона започазаявці робиться посилання тковує роз'єднання зчеплення 118 Що стосується зміни третього на друге відношення (права частина Фігури 6), та останнє забезУ цьому прикладі, вдосконаленому порівняно з печується спонтанно шляхом ковзання зчеплення показаним на Фігурі 4, блок управління 152 постій218 або через втручання блоку 452, який викликає но розраховує відношення R і пристосовує збуце ковзання через відповідне збудження пускача дження (тривалість імпульсів) пускача 245 таким 245 3 моменту Т8, що відповідає проходженню чином, що R змінюється згідно з формулою, випорога, який може бути порогом rs, як показано, значеною по відношенню до моменту, який було або дещо іншим порогом, блок 452 починає зменпопередньо введено у блок пам'яті 452 На Фігурі 7 шувати тиск у пускачі 145 У цьому разі також моцю задану формулу показано кривою, виконаною же бути застосований спосіб згідно з винаходом штрих-пунктирною ЛІНІЄЮ 402 Може існувати кільшляхом підтримання, за допомогою імпульсів мока типів серворегулювання Наприклад, можна у дульованої тривалості, вимірюваного опору дії будь-який момент розрахувати похибку між велипружини R1 у пускачі 145 чиною R та величиною сигналу управління на цей момент Також можна у будь-який момент розраВинахід, звичайно не обмежується наведенихувати похідну за часом R і виправити збудження ми варіантами втілення, які було описано й покапускача 245 з намаганням привести цю похідну зано знову до заданого сигналу управління Застосування винаходу не обов'язково є пов'язаним з іншими контрольними функціями переУ момент Т7 блок 452 виявляє, що значення R дачі пройшло через поріг Rs, наприклад Rs = 2 У цей момент блок 452 віддає команду на безперервне Винахід є сумісним і з іншими передачами, а збудження пускача 145 при PW = 100% з метою не лише з тими, що приводяться у дію відцентророз'єднання зчеплення 118 першої передачі 107 вою силою та/або протидіючим зусиллям зубів Гідравлічний тиск у пускачі 145 показано на графіУ варіанті втілення, у якому необхідно одночаку внизу Фігури 7 Внаслідок цього передача 107 сно змінити стан двох зчеплень, таких як 118 та поступово змінюється з прямої передачі на знижу218 на Фігурі 5, винахід можна застосовувати лише вальну передачу, як показано на діаграмі 403 вгорі до зчеплення, на яке діє джерело сили, наприклад, Фігури 7, її передаточне число, таким чином, змітаке як описано з посиланням на Фігурах з 1 по 4, і нюється з 1,0 на 1,4 Навіть якщо спрацьовування поступова зміна стану іншого зчеплення може репускача 145 є відносно раптовим, це не створює гулюватися іншим чином, зокрема, з застосуванніякого поштовху на вхідному валу 2а або на вихіням описів WO-A-96/23 144 та WO-A-97/08 478 дному валу 26, оскільки регулювання, що забезпе 19 45498 20 ФІГ. 4 ФІГ. 45498 21 R=VE/V5 R5 ФГГ.7 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 22
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 61/06, F16H 61/02
Мітки: перемикання, механізму, плавного, встановлення, спосіб, відношення, має, передач, пристрій, цього, трансмісійний, зачеплення
Код посилання
<a href="https://ua.patents.su/11-45498-sposib-vstanovlennya-plavnogo-zacheplennya-mekhanizmu-peremikannya-peredach-ta-transmisijjnijj-pristrijj-yakijj-maeh-vidnoshennya-do-cogo.html" target="_blank" rel="follow" title="База патентів України">Спосіб встановлення плавного зачеплення механізму перемикання передач та трансмісійний пристрій, який має відношення до цього</a>
Пристрій для попередження несанкціонованого користування транспортним засобом та замок для важеля перемикання передач
Номер патенту: 32405
Опубліковано: 15.12.2000
Автор: Ейзен Ноах
МПК: B60R 25/00, B60R 25/06
Мітки: важеля, транспортним, користування, передач, попередження, засобом, пристрій, перемикання, замок, несанкціонованого
Формула / Реферат:
1. Устройство для предотвращения несанкционированного пользования транспортным средством, содержащее замок, укрепленный на пластине в непосредственной близости от механизма переключения передач и вспомогательное противоугонное устройство, установленное с возможностью коммутации при запирании и отпирании замка, отличающееся тем, что вспомогательное противоугонное устройство или, по крайней мере, часть вспомогательного противоугонного...
Спосіб коректування всередині визначеного діапазону коректування коефіцієнта трансформації, пристрій перемикання для його здійснення та трансформатор з таким пристроєм перемикання
Номер патенту: 41458
Опубліковано: 17.09.2001
Автори: ван де Ватер Корнеліс Йосефус, Бауер Павол, Пап Герардус Хрістоффел, де Хан Сюрд Валтер Херо, Асселман Паулус Герардус Йоханнес Марія, Гріффіун Ян Хендрік
МПК: G05F 1/20
Мітки: трансформатор, коефіцієнта, перемикання, здійснення, діапазону, спосіб, трансформації, коректування, пристроєм, пристрій, таким, визначеного
Формула / Реферат:
1. Спосіб коректування всередині визначеного діапазону коректування трансформації між первинною та вторинною обмотками силового трансформатора, який містить, принаймні, одну обмотку регулювання з відводами, при якому застосовують пристрій перемикання, який відрізняється тим, що перший відвід обмотки регулювання трансформатора підключають на час першої частини періоду змінної напруги трансформатора, а другий відвід підключають на час другої...
Трансмісійний пристрій, зокрема для транспортного засобу, та спосіб керування трансмісійним пристроєм (варіанти)
Номер патенту: 44239
Опубліковано: 15.02.2002
Автор: Антонов Руман
МПК: F16D 43/00, F16H 3/44, F16H 61/26, F16H 61/02, F16H 61/00
Мітки: засобу, керування, варіанти, транспортного, спосіб, трансмісійним, трансмісійний, зокрема, пристроєм, пристрій
Формула / Реферат:
1. Трансмиссионное устройство, содержащее комбинацию вращающихся элементов, несущих зубчатые колеса (7), находящиеся во взаимном зацеплении, средства (18а, 18b) селективного сцепления, находящиеся под действием противодействующих друг другу средств (29, 34) механического воздействия, развивающих усилия, по меньшей мере одно из которых (,
Рама механізму для встановлення колоди у деревообробний верстат
Номер патенту: 28227
Опубліковано: 16.10.2000
Автор: Марічев Юрій Володимирович
МПК: B27B 25/00
Мітки: деревообробний, верстат, механізму, колоди, встановлення, рама
Формула / Реферат:
Рама механизма, для установки бревна в деревообрабатывающий станок, содержащая жесткую прямоугольную конструкцию в которой закреплены поперечные опорные стержни, отличающаяся тем, что в поперечных опорных стержнях выполнены пазы, в которых закреплены сменные закладные опорные элементы, изготовленные из легко обрабатываемого материала, например, из дерева, предназначенные для сопряжения с ними обрабатываемого бревна.
Спосіб встановлення медичної капсули та пристрій для її встановлення
Номер патенту: 35595
Опубліковано: 16.04.2001
Автори: Ніємінен Пекка, Хартзелл Рольф, Хєллє Тімо, Ланкінен Пекка
Мітки: встановлення, медичної, капсули, спосіб, пристрій
Формула / Реферат:
1. Способ установки медицинской капсулы, имеющей сквозное отверстие, на стержнеобразной опоре, который заключается в том, что отверстие, проходящее через капсулу, расширяют путем оказания на него давления непосредственно со стороны опоры, вставляемой в отверстие, и после этого закрепляют капсулу на опоре путем снятия расширяющего давления.2. Устройство для установки медицинской капсулы, имеющей сквозное отверстие, на стержнеобразной...
Попередній патент: Спосіб отримання відбитка пальця та пристрій для його здійснення
Наступний патент: Вузол введення розчину інгібітора коксовідкладення в трубчастих печах піролізу вуглеводневої сировини
Випадковий патент: Спосіб визначення опору сталей корозійно-механічному руйнуванню