Спосіб кадрової синхронізації та стабілізації системи з використанням ортогонального частотного ущільнення
Формула / Реферат
1. Спосіб кадрової синхронізації каналів з використанням ортогонального частотного ущільнення (ОЧУ), який відрізняється тим, що місце розташування вихідної точки кадрової синхронізації визначають у сигналі потоку вибірок даних, що надходить і має повторювані вибірки даних на заздалегідь визначених інтервалах, причому зазначений спосіб містить у собі операції, згідно з якими
а) віднімають вибірки даних з двох точок різних кадрів зазначеного сигналу потоку вибірок даних, відокремлюваних заздалегідь визначеним числом вибірок даних, визначених вирізаючою функцією віднімання;
б) здійснюють прирощування зазначеної вирізаючої функції на деяке значення прирощення, що відповідає щонайменше одній вибірці;
в) повторюють зазначені операції а) і б) доти, поки не буде виявлений мінімум їхнього результату віднімання, причому зазначений мінімум відповідає ідентичним вибіркам даних із зазначених двох точок; і
г) отримують зазначену вихідну точку кадрової синхронізації з результату виконання операції в).
2. Спосіб за п. 1, який відрізняється тим, що зазначений сигнал потоку вибірок даних містить поперемінні послідовності опорних кадрів і інформаційних кадрів.
3. Спосіб за п. 2, який відрізняється тим, що кожна з зазначених послідовностей опорних кадрів містить три послідовних опорних кадри, причому кожний зазначений опорний кадр містить ідентичні дані.
4. Спосіб за п. 3, який відрізняється тим, що кожний з зазначених опорних кадрів і зазначених інформаційних кадрів містить окремий циклічний префікс, що складається з першого і другого ідентичних сегментів даних, і тим, що зазначений перший сегмент даних є частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних.
5. Спосіб за п. 4, який відрізняється тим, що пошук опорного кадру виконують для оцінки місця розташування вихідної точки кадрової синхронізації, причому
зазначена операція а) містить перше віднімання в зазначених вибірках даних із зазначених двох точок, відокремлених деяким цілим числом кадрів, обумовлених зазначеною вирізуючою функцією віднімання;
зазначена операція в) містить у собі операцію виявлення зрізу зазначеного мінімуму результату виконання зазначеного першого віднімання в ряді вибірок даних, починаючи з початку першого опорного кадру зазначеної послідовності опорних кадрів і закінчуючи щонайменше другим опорним кадром зазначеної послідовності, причому зазначений мінімум починається зазначеним зрізом і закінчується фронтом;
зазначена операція г) містить операцію оцінки місця розташування зазначеної вихідної точки кадрової синхронізації в місці розташування зазначеного зрізу.
6. Спосіб за п. 5, який відрізняється тим, що також містить операції, згідно з якими
д) виконують друге віднімання у вибірках даних із двох точок кадру, відокремлюваних довжиною зазначеного значимого блоку даних, обумовленою ще однією вирізуючою функцією віднімання;
е) здійснюють прирощення зазначеної ще однієї вирізуючої функції віднімання, на деяке значення прирощення, що відповідає щонайменше одній вибірці; і
ж) повторюють зазначені операції д) і е) доти, поки не буде виявлений мінімум їхнього результату віднімання, причому зазначений мінімум відповідає ідентичним вибіркам даних із зазначених двох точок; і
з) отримують точне місце розташування зазначеного мінімуму, що виявляється в зазначеній операції ж), як точну вихідну точку кадрової синхронізації.
7. Спосіб за п. 1, який відрізняється тим, що кадрову синхронізацію виконують для оцінки місця розташування зазначеної вихідної точки кадрової синхронізації в зазначеному сигналі потоку вибірок, що надходить, причому зазначений сигнал містить кадри ОЧУ, при цьому
зазначена операція а) містить у собі виконання першого віднімання в зазначених вибірках даних із зазначених двох точок, відокремлених деяким цілим числом кадрів, обумовлених зазначеною вирізуючою функцією віднімання;
зазначена операція в) містить у собі виявлення зрізу зазначеного мінімуму результату виконання зазначеного першого віднімання в ряді вибірок даних, починаючи з початку першого кадру і закінчуючи щонайменше другим кадром, при цьому зазначений мінімум починається зазначеним зрізом і закінчується фронтом;
зазначена операція г) містить у собі оцінку місця розташування зазначеної вихідної точки кадрової синхронізації в місці розташування зазначеного зрізу.
8. Спосіб за п. 7, який відрізняється тим, що зазначений сигнал потоку вибірок даних містить ОЧУ-кадри, при цьому кожний із зазначених кадрів містить окремий циклічний префікс, що складається з першого і другого ідентичних сегментів даних, тим, що зазначений перший сегмент даних є кінцевою частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних з метою формування зазначеного другого сегмента даних, при цьому зазначений спосіб також включає у себе операції, згідно яким
д) виконують друге віднімання у вибірках даних із двох точок кадру, відокремлених довжиною зазначеного значимого блоку даних, обумовленою ще однією вирізуючою функцією віднімання;
е) здійснюють прирощення зазначеної ще однієї вирізуючої функції на деяке значення прирощення, що відповідає щонайменше одній вибірці; і
ж) повторюють зазначені операції д) і е) доти, поки не буде виявлений мінімум їхнього результату віднімання, причому зазначений мінімум відповідає ідентичним вибіркам даних із зазначених двох точок; і
з) отримують точне місце розташування зазначеного мінімуму, виявленого в зазначеній операції ж), як точну вихідну точку кадрової синхронізації.
9. Спосіб за п. 8, який відрізняється тим, що також містить у собі наступні операції, що виконують до операції а):
і) на стороні передавача: забезпечують серед зазначених послідовностей переданих інформаційних кадрів також послідовності опорних кадрів на заздалегідь визначених правильних інтервалах, причому кожна з зазначених послідовностей опорних кадрів містить щонайменше один опорний кадр даних, відомих приймачу, причому кожен зазначений щонайменше один опорний кадр містить ідентичні дані, відомі приймачу;
к) на зазначеній стороні передавача: формують зазначений окремий циклічний префікс для кожного переданого кадру, при цьому кожний циклічний префікс складається з двох ідентичних сегментів даних, або кінцевий блок кожного зазначеного кадру копіюють і додають до початку зазначеного кожного кадру, або початковий блок кожного кадру копіюють і додають до кінця зазначеного кожного кадру.
10. Спосіб корекції каналу з використанням ортогонального частотного ущільнення (ОЧУ), каналу передачі від одного пункту на багато пунктів, виконаного на стороні приймача ОЧУ-каналу, що містить в собі операції, згідно з якими
а) приймають сигнал потоку вибірок даних, що надходить і містить поперемінні послідовності опорних і інформаційних кадрів, при цьому кожний із зазначених опорних кадрів містить відомі приймачу дані;
б) виявляють зазначені опорні кадри в зазначеному сигналі потоку вибірок даних ОЧУ-кадрів, що надходить;
в) перетворюють зазначений потік ОЧУ-кадрів, що надходить, з часової області в частотну область;
г) формують вектор корекції за допомогою зазначеної послідовності опорних кадрів і даних, відомих приймачу, для корекції помилок мовлення, що виникають через спотворення, викликані зазначеним ОЧУ-каналом;
д) коригують кожний інформаційний кадр з числа зазначених послідовностей інформаційних кадрів, прийнятих у зазначеному приймачі, за допомогою зазначеного вектора корекції для усунення впливу спотворення зазначених кадрів, обумовленого зазначеним ОЧУ-каналом.
11. Спосіб за п. 10, який відрізняється тим, що операція в) містить у собі операцію кореляції часової області для кожної пари опорних кадрів, що надходить, з метою отримання коефіцієнта ![]() причому зазначена операція г) містить корекцію впливу зсуву частоти зазначеного ОЧУ-канала, за допомогою зазначеного коефіцієнта
причому зазначена операція г) містить корекцію впливу зсуву частоти зазначеного ОЧУ-канала, за допомогою зазначеного коефіцієнта ![]()
12. Спосіб за п. 10, який відрізняється тим, що зазначені послідовності опорних і інформаційних кадрів є поперемінними і мають заздалегідь визначене число кадрів, і операцію б) виконують за рахунок спостереження за вихідною точкою кадрової синхронізації, місце розташування якої було до цього визначено.
13. Спосіб за п. 12, який відрізняється тим, що операцію кадрової синхронізації виконують до операції б) для визначення місця розташування вихідної точки кадрової синхронізації в зазначеному потоці ОЧУ-кадрів, що надходить, причому зазначена кадрова синхронізація містить операції, згідно з якими
е) віднімають дані, взяті з двох точок зазначеного сигналу потоку вибірок даних, що надходить, при цьому зазначені точки відділені заздалегідь визначеним числом вибірок даних, визначених вирізуючою функцією віднімання;
ж) здійснюють прирощення зазначеної вирізуючої функції на деяке значення прирощення, що відповідає щонайменше одній вибірці;
з) повторюють зазначені операції е) і ж) доти, поки не буде виявлений мінімум результату їхнього віднімання, причому зазначений мінімум відповідає ідентичним вибіркам даних із зазначених двох точок; і
и) отримують зазначену вихідну точку кадрової синхронізації з результату операції з).
14. Спосіб за п. 13, який відрізняється тим, що кожна з зазначених послідовностей опорних кадрів містить три послідовних опорних кадри, при цьому кожний опорний кадр містить ідентичні дані.
15. Спосіб за п. 14, який відрізняється тим, що кожний із зазначених опорних кадрів і зазначених інформаційних кадрів містить окремий циклічний префікс, що складається з першого і другого ідентичних сегментів даних, причому зазначений перший сегмент даних є частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних.
16. Спосіб за п. 15, який відрізняється тим, що пошук опорного кадру виконують для оцінки місця розташування вихідної точки кадрової синхронізації, при цьому
зазначена операція е) містить у собі виконання першого віднімання в зазначених вибірках даних із зазначених двох точок, відокремлених деяким цілим числом кадрів, обумовлених зазначеною вирізуючою функцією віднімання;
зазначена операція з) містить у собі виконання виявлення зрізу мінімуму результату виконання зазначеного першого віднімання в ряді вибірок даних, починаючи з початку першого кадру і закінчуючи щонайменше другим кадром, причому зазначений мінімум починається зазначеним зрізом і закінчується фронтом;
зазначена операція і) містить у собі оцінку місця розташування зазначеної вихідної точки кадрової синхронізації в місці розташування зазначеного зрізу.
17. Спосіб за п. 16, який відрізняється тим, що зазначений сигнал потоку вибірок даних містить ОЧУ-кадри, при цьому кожний із зазначених кадрів містить окремий циклічний префікс, що складається з першого і другого ідентичних сегментів даних, тим, що зазначений перший сегмент даних є кінцевою частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних, при цьому зазначений спосіб також містить у собі операції, згідно з якими
к) виконують друге віднімання у вибірках даних із двох точок кадру, відокремлених довжиною зазначеного значимого блоку даних, обумовленого ще однією вирізуючою функцією віднімання;
л) здійснюють збільшення зазначеної ще однієї вирізуючої функції, на деяке значення збільшення, що відповідає щонайменше одній вибірці;
м) повторюють зазначені операції к) і л) доти, поки не буде виявлений мінімум результату їхнього віднімання, причому зазначений мінімум відповідає ідентичним вибіркам даних із зазначених двох точок; і
н) отримують точне місце розташування зазначеного мінімуму, що виявляється в зазначеній операції м), як точну вихідну точку кадрової синхронізації.
18. Спосіб за п. 10, який відрізняється тим, що зазначена послідовність опорних кадрів містить щонайменше один опорний кадр, і тим, що операція г) містить у собі виконання, щонайменше для одного опорного кадру зазначеної послідовності опорних кадрів, ділення першого опорного кадру з числа зазначеної послідовності на зазначені дані, відомі зазначеному приймачу і запам'ятовані в зазначеному приймачі, і отримання щонайменше одного коефіцієнта, що представляє щонайменше один вектор корекції, що представляє зворотну величину амплітудно-частотної характеристики зазначеного ОЧУ-каналу.
19. Спосіб за п. 18, який відрізняється тим, що при отриманні вектора корекції числом більше одного середнє значення всіх векторів корекції обчислюють для отримання усередненого вектора корекції.
20. Спосіб за п. 19, який відрізняється тим, що кожний із зазначених опорних і інформаційних кадрів містить циклічний префікс, що складається з першого і другого ідентичних сегментів даних, при цьому зазначений перший сегмент даних є кінцевою частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних;
зазначена операція в) використовує вихідну точку кадрової синхронізації в зазначеному циклічному префіксі для перетворення зазначеного потоку кадрів ОЧУ, що надходить, з часової області в частотну область.
21. Спосіб за п. 20, який відрізняється тим, що також містить операцію, відповідно до якої
перевіряють точність зазначеного середнього значення всіх векторів корекції за допомогою наступних операцій, згідно з якими
виконують множення зазначеного усередненого вектора корекції на останній опорний кадр із числа зазначеної послідовності опорних кадрів, при цьому зазначений останній опорний кадр не використовують до обчислення зазначених векторів корекції, при цьому зазначений результат представляє відкоригований зазначений останній опорний кадр, у результаті чого відкоригований опорний кадр повинен дорівнювати зазначеним даним, відомим зазначеному приймачу;
порівнюють зазначений результат з зазначеними даними, відомими зазначеному приймачу, для обчислення точності зазначеного усередненого вектора корекції;
переміщують зазначену вихідну точку кадрової синхронізації в зазначеному циклічному префіксі і використовують нові дані, зчитані з нового місця розташування, для формування нового усередненого вектора корекції, за допомогою попередніх операцій.
22. Спосіб за п. 12, який відрізняється тим, що зазначена послідовність опорних кадрів містить три опорних кадри, і кожний із зазначених опорних і інформаційних кадрів містить циклічний префікс, що складається з першого і другого ідентичних сегментів даних, при цьому зазначений перший сегмент даних є частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних, причому зазначена операція в) використовує вихідну точку кадрової синхронізації в зазначеному циклічному префіксі для перетворення зазначеного потоку ОЧУ-кадрів, що надходить, з часової області в частотну область.
23. Спосіб за п. 22, який відрізняється тим, що операція г) містить у собі операції, згідно яким
поділяють перший опорний кадр з числа зазначеної послідовності опорних кадрів на зазначені дані, відомі зазначеному приймачу і запам'ятовані в зазначеному приймачі, і отримують перший коефіцієнт, що представляє першу зворотну величину амплітудно-частотної характеристики зазначеного ОЧУ-каналу, що є першим вектором корекції для зазначеного ОЧУ-каналу;
поділяють другий опорний кадр із числа зазначеної послідовності опорних кадрів на зазначені дані, відомі зазначеному приймачу і запам'ятовані в зазначеному приймачі, і отримують другий коефіцієнт, що представляє другу зворотну величину амплітудно-частотної характеристики зазначеного ОЧУ-каналу, що є другим вектором корекції для зазначеного ОЧУ-каналу;
обчислюють середнє значення зазначених першого коефіцієнта і другого коефіцієнта, причому зазначене середнє значення представляє вектор корекції зазначеного ОЧУ-каналу;
перевіряють точність зазначеного вектора корекції шляхом порівняння результату множення зазначеного вектора на третій опорний кадр із числа зазначеної послідовності опорних кадрів з зазначеними даними, відомими зазначеному приймачу, причому зазначений результат представляє відкоригований опорний кадр, у результаті чого зазначений відкоригований опорний кадр повинен дорівнювати зазначеним даним, відомим зазначеному приймачу;
переміщують зазначену вихідну точку кадрової синхронізації в зазначеному циклічному префіксі і використовують нові дані, зчитані з нового місця розташування, для формування нового усередненого вектора корекції, за допомогою попередніх операцій.
Текст
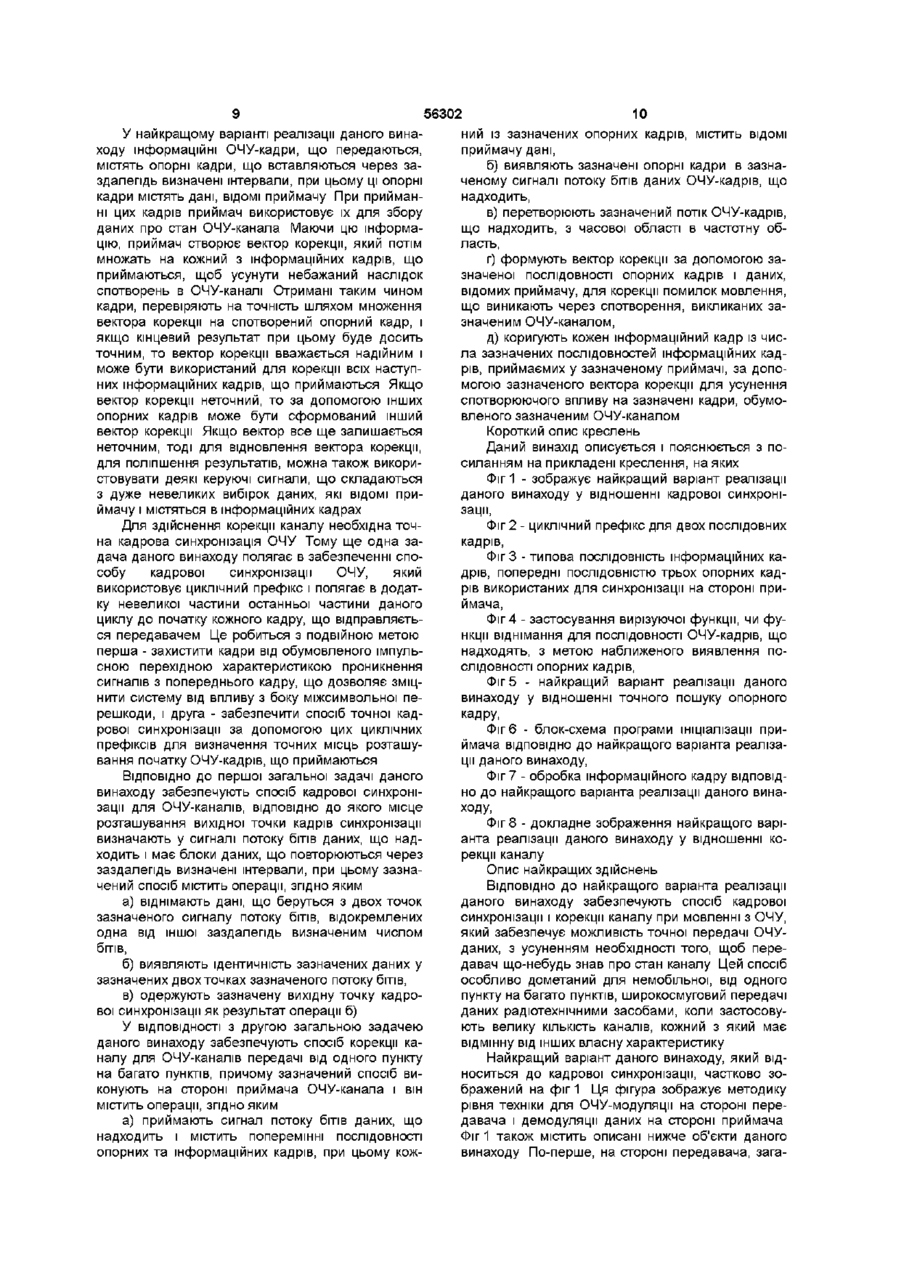
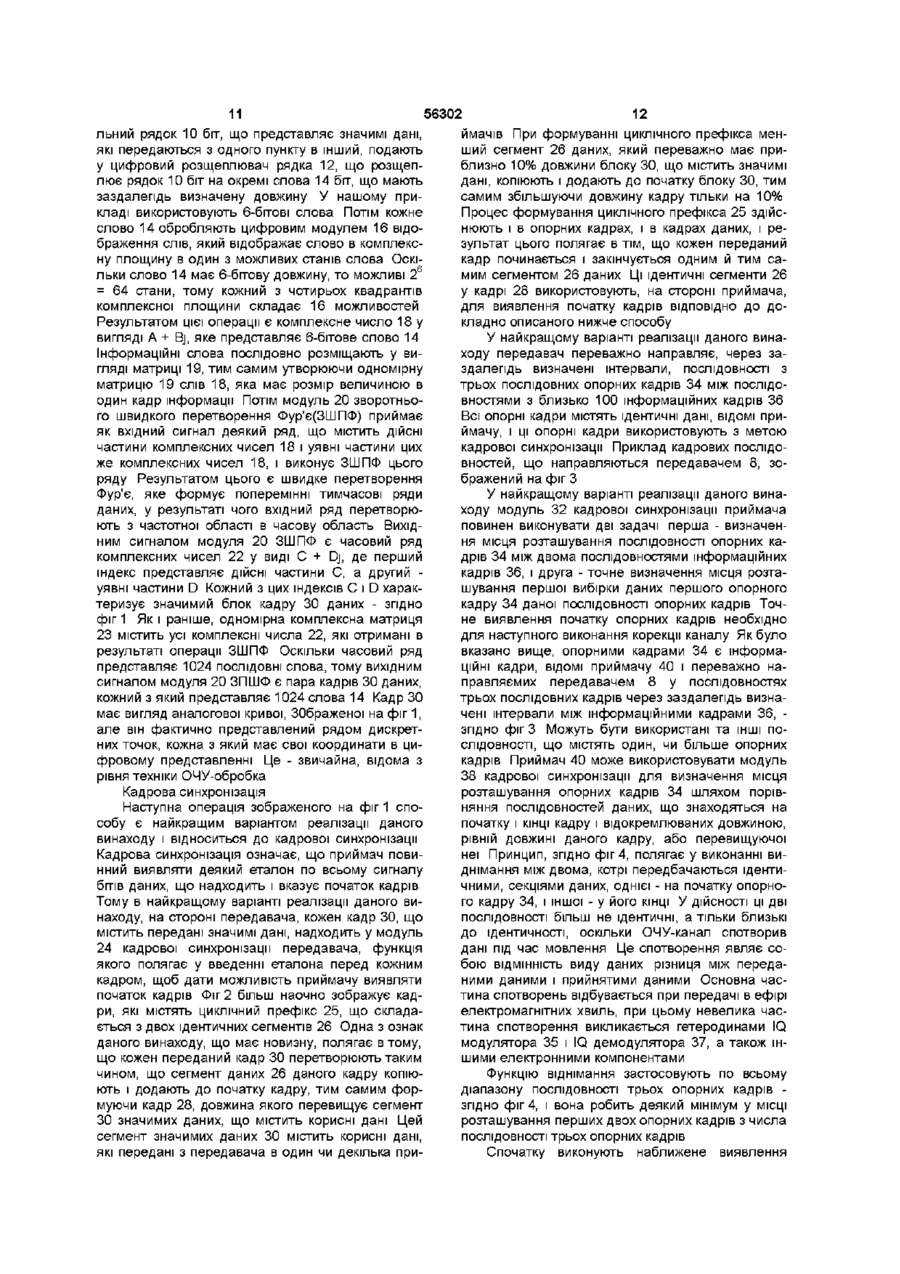
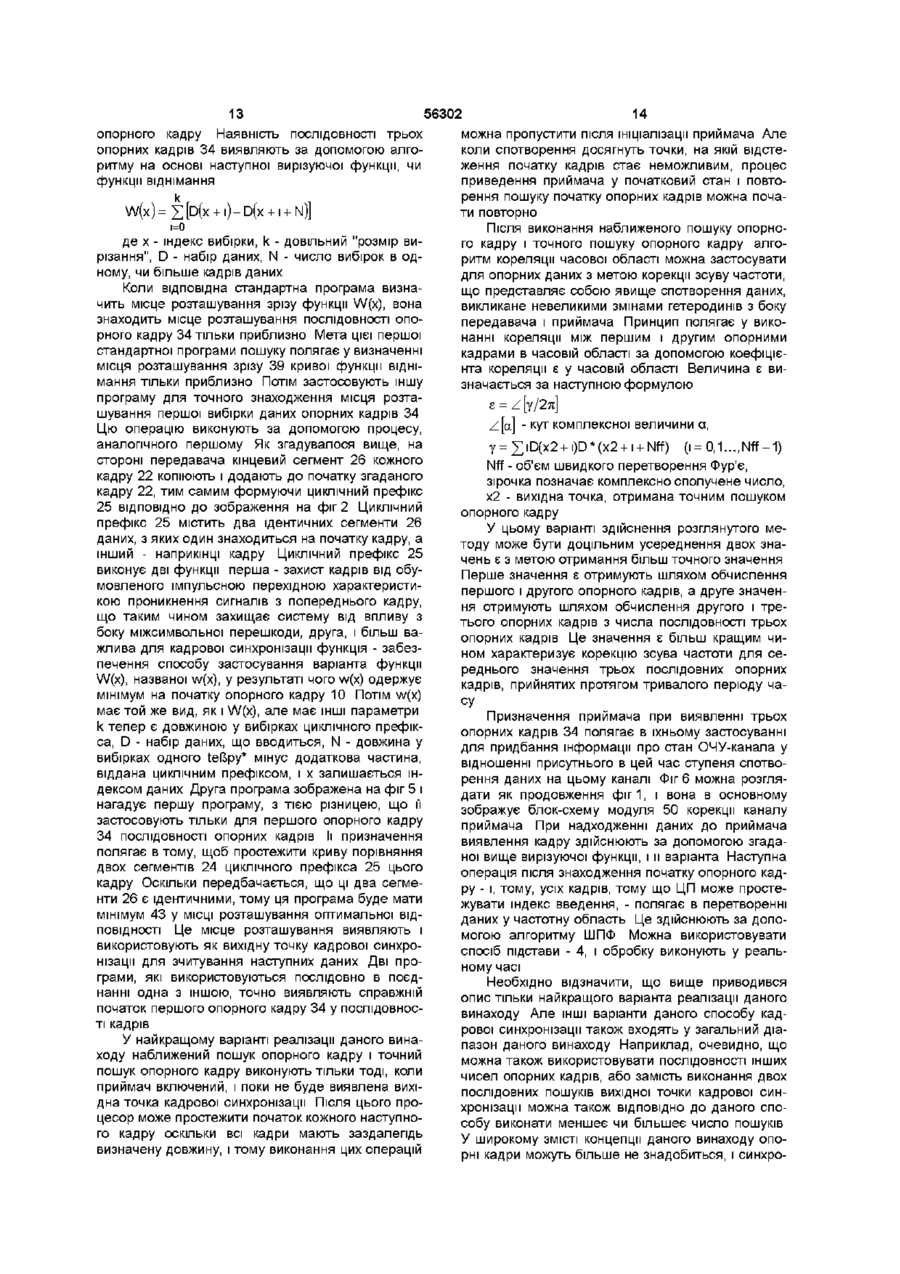
1 Спосіб кадрової синхронізації каналів з використанням ортогонального частотного ущільнення (ОЧУ), який відрізняється тим, що місце розташування вихідної точки кадрової синхронізації визначають у сигналі потоку вибірок даних, що надходить і має повторювані вибірки даних на заздалегідь визначених інтервалах, причому зазначений спосіб містить у собі операції, згідно з якими а) віднімають вибірки даних з двох точок різних кадрів зазначеного сигналу потоку вибірок даних, відокремлюваних заздалегідь визначеним числом вибірок даних, визначених вирізаючою функцією віднімання, б) здійснюють прирощування зазначеної вирізаючої функції на деяке значення прирощення, що відповідає щонайменше одній вибірці, в) повторюють зазначені операції а) і б) доти, поки не буде виявлений мінімум їхнього результату віднімання, причому зазначений мінімум відповідає ідентичним вибіркам даних із зазначених двох точок, і г) отримують зазначену вихідну точку кадрової синхронізації з результату виконання операції в) 2 Спосіб за п 1, який відрізняється тим, що зазначений сигнал потоку вибірок даних містить поперемінні ПОСЛІДОВНОСТІ опорних кадрів і інформаційних кадрів 3 Спосіб за п 2, який відрізняється тим, що кож СИСТЕМИ З ВИКОРИСТАННЯМ ОРТОГО на з зазначених послідовностей опорних кадрів містить три послідовних опорних кадри, причому кожний зазначений опорний кадр містить ідентичні дані 4 Спосіб за п 3, який відрізняється тим, що кожний з зазначених опорних кадрів і зазначених інформаційних кадрів містить окремий циклічний префікс, що складається з першого і другого ідентичних сегментів даних, і тим, що зазначений перший сегмент даних є частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних 5 Спосіб за п 4, який відрізняється тим, що пошук опорного кадру виконують для оцінки місця розташування вихідної точки кадрової синхронізації, причому зазначена операція а) містить перше віднімання в зазначених вибірках даних із зазначених двох точок, відокремлених деяким цілим числом кадрів, обумовлених зазначеною вирізуючою функцією віднімання, зазначена операція в) містить у собі операцію виявлення зрізу зазначеного мінімуму результату виконання зазначеного першого віднімання в ряді вибірок даних, починаючи з початку першого опорного кадру зазначеної ПОСЛІДОВНОСТІ опорних кадрів і закінчуючи щонайменше другим опорним кадром зазначеної ПОСЛІДОВНОСТІ, причому зазначений мінімум починається зазначеним зрізом і закінчується фронтом, зазначена операція г) містить операцію оцінки місця розташування зазначеної вихідної точки кадрової синхронізації в МІСЦІ розташування зазначеного зрізу 6 Спосіб за п 5, який відрізняється тим, що також містить операції, згідно з якими д) виконують друге віднімання у вибірках даних із двох точок кадру, відокремлюваних довжиною зазначеного значимого блоку даних, обумовленою ще однією вирізуючою функцією віднімання, є) здійснюють прирощення зазначеної ще однієї вирізуючої функції віднімання, на деяке значення прирощення, що відповідає щонайменше одній вибірці, і ж) повторюють зазначені операції д) і є) доти, поки не буде виявлений мінімум їхнього результату О о со (О ю 56302 віднімання, причому зазначений мінімум відповізначений щонайменше один опорний кадр містить дає ідентичним вибіркам даних із зазначених двох ідентичні дані, ВІДОМІ приймачу, точок, і к) на зазначеній стороні передавача формують з) отримують точне місце розташування зазначезазначений окремий циклічний префікс для кожноного мінімуму, що виявляється в зазначеній опего переданого кадру, при цьому кожний циклічний рації ж), як точну вихідну точку кадрової синхроніпрефікс складається з двох ідентичних сегментів зації даних, або кінцевий блок кожного зазначеного 7 Спосіб за п 1, який відрізняється тим, що кадкадру копіюють і додають до початку зазначеного рову синхронізацію виконують для оцінки місця кожного кадру, або початковий блок кожного кадру розташування зазначеної вихідної точки кадрової копіюють і додають до кінця зазначеного кожного синхронізації в зазначеному сигналі потоку вибікадру рок, що надходить, причому зазначений сигнал 10 Спосіб корекції каналу з використанням ортомістить кадри ОЧУ, при цьому гонального частотного ущільнення (ОЧУ), каналу передачі від одного пункту на багато пунктів, викозазначена операція а) містить у собі виконання наного на стороні приймача ОЧУ-каналу, що першого віднімання в зазначених вибірках даних із містить в собі операції, згідно з якими зазначених двох точок, відокремлених деяким цілим числом кадрів, обумовлених зазначеною виріа) приймають сигнал потоку вибірок даних, що зуючою функцією віднімання, надходить і містить поперемінні ПОСЛІДОВНОСТІ зазначена операція в) містить у собі виявлення опорних і інформаційних кадрів, при цьому кожний зрізу зазначеного мінімуму результату виконання із зазначених опорних кадрів містить ВІДОМІ призазначеного першого віднімання в ряді вибірок ймачу дані, даних, починаючи з початку першого кадру і закінб) виявляють зазначені опорні кадри в зазначеночуючи щонайменше другим кадром, при цьому му сигналі потоку вибірок даних ОЧУ-кадрів, що зазначений мінімум починається зазначеним зрінадходить, зом і закінчується фронтом, в) перетворюють зазначений потік ОЧУ-кадрів, що надходить, з часової області в частотну область, зазначена операція г) містить у собі оцінку місця розташування зазначеної вихідної точки кадрової г) формують вектор корекції за допомогою зазнасинхронізації в МІСЦІ розташування зазначеного ченої ПОСЛІДОВНОСТІ опорних кадрів і даних, зрізу відомих приймачу, для корекції помилок мовлення, що виникають через спотворення, викликані за8 Спосіб за п 7, який відрізняється тим, що зазначеним ОЧУ-каналом, значений сигнал потоку вибірок даних містить ОЧУ-кадри, при цьому кожний із зазначених кадрів д) коригують кожний інформаційний кадр з числа містить окремий циклічний префікс, що складаєтьзазначених послідовностей інформаційних кадрів, ся з першого і другого ідентичних сегментів даних, прийнятих у зазначеному приймачі, за допомогою тим, що зазначений перший сегмент даних є кінзазначеного вектора корекції для усунення впливу цевою частиною значимого блоку даних зазначеспотворення зазначених кадрів, обумовленого ного кадру, і його копіюють і додають до зазначезазначеним ОЧУ-каналом ного значимого блоку даних з метою формування 11 Спосіб за п 10, який відрізняється тим, що зазначеного другого сегмента даних, при цьому операція в) містить у собі операцію кореляції чазазначений спосіб також включає у себе операції, сової області для кожної пари опорних кадрів, що згідно яким надходить, з метою отримання коефіцієнта є, д) виконують друге віднімання у вибірках даних із причому зазначена операція г) містить корекцію двох точок кадру, відокремлених довжиною зазнавпливу зсуву частоти зазначеного ОЧУ-канала, за ченого значимого блоку даних, обумовленою ще допомогою зазначеного коефіцієнта Є. однією вирізуючою функцією віднімання, 12 Спосіб за п 10, який відрізняється тим, що є) здійснюють прирощення зазначеної ще однієї зазначені ПОСЛІДОВНОСТІ опорних і інформаційних вирізуючої функції на деяке значення прирощення, кадрів є поперемінними і мають заздалегідь вищо відповідає щонайменше одній вибірці, і значене число кадрів, і операцію б) виконують за ж) повторюють зазначені операції д) і є) доти, поки рахунок спостереження за вихідною точкою кадроне буде виявлений мінімум їхнього результату вої синхронізації, місце розташування якої було до віднімання, причому зазначений мінімум відповіцього визначено дає ідентичним вибіркам даних із зазначених двох 13 Спосіб за п 12, який відрізняється тим, що точок, і операцію кадрової синхронізації виконують до з) отримують точне місце розташування зазначеоперації б) для визначення місця розташування ного мінімуму, виявленого в зазначеній операції вихідної точки кадрової синхронізації в зазначенож), як точну вихідну точку кадрової синхронізації му потоці ОЧУ-кадрів, що надходить, причому за9 Спосіб за п 8, який відрізняється тим, що також значена кадрова синхронізація містить операції, містить у собі наступні операції, що виконують до згідно з якими операції а) є) віднімають дані, взяті з двох точок зазначеного і) на стороні передавача забезпечують серед засигналу потоку вибірок даних, що надходить, при значених послідовностей переданих інформаційцьому зазначені точки відділені заздалегідь визнаних кадрів також ПОСЛІДОВНОСТІ опорних кадрів на ченим числом вибірок даних, визначених вирізуюзаздалегідь визначених правильних інтервалах, чою функцією віднімання, причому кожна з зазначених послідовностей опорж) здійснюють прирощення зазначеної вирізуючої них кадрів містить щонайменше один опорний функції на деяке значення прирощення, що відпокадр даних, відомих приймачу, причому кожен завідає щонайменше одній вибірці, 56302 з) повторюють зазначені операції є) і ж) доти, поки не буде виявлений мінімум результату їхнього віднімання, причому зазначений мінімум відповідає ідентичним вибіркам даних із зазначених двох точок, і и) отримують зазначену вихідну точку кадрової синхронізації з результату операції з) 14 Спосіб за п 13, який відрізняється тим, що кожна з зазначених послідовностей опорних кадрів містить три послідовних опорних кадри, при цьому кожний опорний кадр містить ідентичні дані 15 Спосіб за п 14, який відрізняється тим, що кожний із зазначених опорних кадрів і зазначених інформаційних кадрів містить окремий циклічний префікс, що складається з першого і другого ідентичних сегментів даних, причому зазначений перший сегмент даних є частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних 16 Спосіб за п 15, який відрізняється тим, що пошук опорного кадру виконують для оцінки місця розташування вихідної точки кадрової синхронізації, при цьому зазначена операція є) містить у собі виконання першого віднімання в зазначених вибірках даних із зазначених двох точок, відокремлених деяким цілим числом кадрів, обумовлених зазначеною вирізуючою функцією віднімання, зазначена операція з) містить у собі виконання виявлення зрізу мінімуму результату виконання зазначеного першого віднімання в ряді вибірок даних, починаючи з початку першого кадру і закінчуючи щонайменше другим кадром, причому зазначений мінімум починається зазначеним зрізом і закінчується фронтом, зазначена операція і) містить у собі оцінку місця розташування зазначеної вихідної точки кадрової синхронізації в МІСЦІ розташування зазначеного зрізу 17 Спосіб за п 16, який відрізняється тим, що зазначений сигнал потоку вибірок даних містить ОЧУ-кадри, при цьому кожний із зазначених кадрів містить окремий циклічний префікс, що складається з першого і другого ідентичних сегментів даних, тим, що зазначений перший сегмент даних є кінцевою частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних, при цьому зазначений спосіб також містить у собі операції, згідно з якими к) виконують друге віднімання у вибірках даних із двох точок кадру, відокремлених довжиною зазначеного значимого блоку даних, обумовленого ще однією вирізуючою функцією віднімання, л) здійснюють збільшення зазначеної ще однієї вирізуючої функції, на деяке значення збільшення, що відповідає щонайменше одній вибірці, м) повторюють зазначені операції к) і л) доти, поки не буде виявлений мінімум результату їхнього віднімання, причому зазначений мінімум відповідає ідентичним вибіркам даних із зазначених двох точок, і н) отримують точне місце розташування зазначеного мінімуму, що виявляється в зазначеній опе рації м), як точну вихідну точку кадрової синхронізації 18 Спосіб за п 10, який відрізняється тим, що зазначена ПОСЛІДОВНІСТЬ опорних кадрів містить щонайменше один опорний кадр, і тим, що операція г) містить у собі виконання, щонайменше для одного опорного кадру зазначеної ПОСЛІДОВНОСТІ опорних кадрів, ділення першого опорного кадру з числа зазначеної ПОСЛІДОВНОСТІ на зазначені дані, ВІДОМІ зазначеному приймачу і запам'ятовані в зазначеному приймачі, і отримання щонайменше одного коефіцієнта, що представляє щонайменше один вектор корекції, що представляє зворотну величину амплітудно-частотної характеристики зазначеного ОЧУ-каналу 19 Спосіб за п 18, який відрізняється тим, що при отриманні вектора корекції числом більше одного середнє значення всіх векторів корекції обчислюють для отримання усередненого вектора корекції 20 Спосіб за п 19, який відрізняється тим, що кожний із зазначених опорних і інформаційних кадрів містить циклічний префікс, що складається з першого і другого ідентичних сегментів даних, при цьому зазначений перший сегмент даних є кінцевою частиною значимого блоку даних зазначеного кадру, і його копіюють і додають до зазначеного значимого блоку даних для формування зазначеного другого сегмента даних, зазначена операція в) використовує вихідну точку кадрової синхронізації в зазначеному циклічному префіксі для перетворення зазначеного потоку кадрів ОЧУ, що надходить, з часової області в частотну область 21 Спосіб за п 20, який відрізняється тим, що також містить операцію, ВІДПОВІДНО ДО якої перевіряють точність зазначеного середнього значення всіх векторів корекції за допомогою наступнихоперацій, згідно з якими виконують множення зазначеного усередненого вектора корекції на останній опорний кадр із числа зазначеної ПОСЛІДОВНОСТІ опорних кадрів, при цьому зазначений останній опорний кадр не використовують до обчислення зазначених векторів корекції, при цьому зазначений результат представляє відкоригований зазначений останній опорний кадр, у результаті чого відкоригований опорний кадр повинен дорівнювати зазначеним даним, відомим зазначеному приймачу, порівнюють зазначений результат з зазначеними даними, відомими зазначеному приймачу, для обчислення точності зазначеного усередненого вектора корекції, переміщують зазначену вихідну точку кадрової синхронізації в зазначеному циклічному префіксі і використовують нові дані, зчитані з нового місця розташування, для формування нового усередненого вектора корекції, за допомогою попередніх операцій 22 Спосіб за п 12, який відрізняється тим, що зазначена ПОСЛІДОВНІСТЬ опорних кадрів містить три опорних кадри, і кожний із зазначених опорних і інформаційних кадрів містить циклічний префікс, що складається з першого і другого ідентичних сегментів даних, при цьому зазначений перший сегмент даних є частиною значимого блоку даних 56302 8 зазначеного кадру, і його копіюють і додають до амплітудно-частотної характеристики зазначеного зазначеного значимого блоку даних для формуОЧУ-каналу, що є другим вектором корекції для вання зазначеного другого сегмента даних, призазначеного ОЧУ-каналу, чому зазначена операція в) використовує вихідну обчислюють середнє значення зазначених першоточку кадрової синхронізації в зазначеному цикліго коефіцієнта і другого коефіцієнта, причому зачному префіксі для перетворення зазначеного значене середнє значення представляє вектор потоку ОЧУ-кадрів, що надходить, з часової облакорекції зазначеного ОЧУ-каналу, сті в частотну область перевіряють точність зазначеного вектора корекції шляхом порівняння результату множення зазна23 Спосіб за п 22, який відрізняється тим, що ченого вектора на третій опорний кадр із числа операція г) містить у собі операції, згідно яким зазначеної ПОСЛІДОВНОСТІ опорних кадрів з зазнаподіляють перший опорний кадр з числа зазначеченими даними, відомими зазначеному приймачу, ної ПОСЛІДОВНОСТІ опорних кадрів на зазначені дані, причому зазначений результат представляє ВІДОМІ зазначеному приймачу і запам'ятовані в відкоригований опорний кадр, у результаті чого зазначеному приймачі, і отримують перший коефізазначений відкоригований опорний кадр повинен цієнт, що представляє першу зворотну величину дорівнювати зазначеним даним, відомим зазначеамплітудно-частотної характеристики зазначеного ному приймачу, ОЧУ-каналу, що є першим вектором корекції для зазначеного ОЧУ-каналу, переміщують зазначену вихідну точку кадрової синхронізації в зазначеному циклічному префіксі і поділяють другий опорний кадр із числа зазначевикористовують нові дані, зчитані з нового місця ної ПОСЛІДОВНОСТІ опорних кадрів на зазначені дані, розташування, для формування нового усереднеВІДОМІ зазначеному приймачу і запам'ятовані в ного вектора корекції, за допомогою попередніх зазначеному приймачі, і отримують другий кооперацій ефіцієнт, що представляє другу зворотну величину Даний винахід відноситься до корекції каналу і кадрової синхронізації для мовлення даних з використанням ортогонального частотного ущільнення(ОЧУ) для немобільних передавачів і приймачів В останні роки техніка електрозв'язку стала галуззю, що переживає небувалий розвиток Це викликано зростаючою потребою умовні усе більшої КІЛЬКОСТІ даних, для яких потрібно більш висока смуга частот каналу електрозв'язку Один з видів пропонованої радютехнолопі, що забезпечує таку широку смугу частот, полягає в методиці модуляції, названої Ортогональним Частотним Ущільненням(ОЧУ) і недавно запропонованої для застосування для немобільного мовлення цифрового відеосигналу ОЧУ являє собою ефективний засіб забезпечення ефективної по потужності передачі сигналу великому числу користувачів одного і того ж каналу Основна концепція ОЧУ полягає в паралельній передачі блоків даних за допомогою великого числа ортогональних піднесучих Незважаючи на те, що в порівнянні з іншими методами мовлення ОЧУ-передача є точним методом модуляції, маються дві зв'язані з нею труднощі одна - кадрова синхронізація, і інша - корекція каналу ОЧУ-далі розбивають на окремо модульовані секції, називані кадрами Ці кадри складають у безперервну ПОСЛІДОВНІСТЬ І передають по ОЧУ-каналу При цьому для приймача насамперед важливо точно знати, де починаються і закінчуються кадри, щоб забезпечити собі значимі дані Перебування цих початків і закінчень кадрів добре відомо як кадрова синхронізація Існують різні методи виконання кадрової синхронізації, але вони звичайно припускають уведення прапорів даних, щоб відзначати початок і кінець кадрів Це робиться за рахунок уведення блоків даних, що сповільнюють швидкість передачі значимих даних Оскільки ОЧУ-канали ІНОДІ спотворюють передані ними дані настільки, що їх ледь можна розпізнати, тому необхідно забезпечити технічне рішення для корекції спотворення, що відбувається в каналі Така методика корекції є, але ВІДПОВІДНО до неї часто потрібно, щоб корекція даних виконувалася на стороні передавача, і тому необхідно, щоб передавач знав стан даного каналу Також ця методика не застосовна для ОЧУ-передачі від одного пункту на багато пунктів, оскільки при цьому бере участь безліч каналів, кожний з яких має свою власну характеристику Необхідно відзначити, що в даній заявці термін ОЧУ-канал використовується для позначення ефірного каналу електромагнітних хвиль, що представляють ОЧУ-кадри, передані з передавальної системи в прийомну систему У випадку, коли в даному каналі діє безліч приймачів, що захоплюють той самий переданий сигнал, дана заявка відноситься до каналу передачі від одного пункту на багато пунктів Короткий опис суті винаходу Задача даного винаходу полягає в забезпеченні способу і пристрою для здійснення точної кадрової синхронізації ОЧУ-мовлення за рахунок додатка невеликого блоку кожного переданого ОЧУ-кадри до його власного початку, таким чином створюючи циклічний префікс для кожного кадру Цей циклічний префікс потім використовують на стороні приймача для знаходження початку приймаємих ОЧУ-кадрів Ще один об'єкт даного винаходу полягає в забезпеченні ефективного способу точної корекції ОЧУ-кадрів, що приймаються по ОЧУ-каналу Для цього способу не потрібно, щоб передавач знав що-небудь про стан ОЧУ-канала, і тому його можна використовувати для ОЧУ-мовлення даних від одного пункту на багато пунктів 56302 У найкращому варіанті реалізації даного винаходу інформаційні ОЧУ-кадри, що передаються, містять опорні кадри, що вставляються через заздалегідь визначені інтервали, при цьому ці опорні кадри містять дані, ВІДОМІ приймачу При прийманні цих кадрів приймач використовує їх для збору даних про стан ОЧУ-канала Маючи цю інформацію, приймач створює вектор корекції, який потім множать на кожний з інформаційних кадрів, що приймаються, щоб усунути небажаний наслідок спотворень в ОЧУ-каналі Отримані таким чином кадри, перевіряють на точність шляхом множення вектора корекції на спотворений опорний кадр, і якщо кінцевий результат при цьому буде досить точним, то вектор корекції вважається надійним і може бути використаний для корекції всіх наступних інформаційних кадрів, що приймаються Якщо вектор корекції неточний, то за допомогою інших опорних кадрів може бути сформований інший вектор корекції Якщо вектор все ще залишається неточним, тоді для відновлення вектора корекції, для поліпшення результатів, можна також використовувати деякі керуючі сигнали, що складаються з дуже невеликих вибірок даних, які ВІДОМІ приймачу і містяться в інформаційних кадрах Для здійснення корекції каналу необхідна точна кадрова синхронізація ОЧУ Тому ще одна задача даного винаходу полягає в забезпеченні способу кадрової синхронізації ОЧУ, який використовує циклічний префікс і полягає в додатку невеликої частини останньої частини даного циклу до початку кожного кадру, що відправляється передавачем Це робиться з подвійною метою перша - захистити кадри від обумовленого імпульсною перехідною характеристикою проникнення сигналів з попереднього кадру, що дозволяє зміцнити систему від впливу з боку міжсимвольної перешкоди, і друга - забезпечити спосіб точної кадрової синхронізації за допомогою цих циклічних префіксів для визначення точних місць розташування початку ОЧУ-кадрів, що приймаються ВІДПОВІДНО ДО першої загальної задачі даного винаходу забезпечують спосіб кадрової синхронізації для ОЧУ-каналів, ВІДПОВІДНО ДО ЯКОГО місце розташування вихідної точки кадрів синхронізації визначають у сигналі потоку бітів даних, що надходить і має блоки даних, що повторюються через заздалегідь визначені інтервали, при цьому зазначений спосіб містить операції, згідно яким а) віднімають дані, що беруться з двох точок зазначеного сигналу потоку бітів, відокремлених одна від іншої заздалегідь визначеним числом бітів, б) виявляють ідентичність зазначених даних у зазначених двох точках зазначеного потоку бітів, в) одержують зазначену вихідну точку кадрової синхронізації як результат операції б) У ВІДПОВІДНОСТІ з другою загальною задачею даного винаходу забезпечують спосіб корекції каналу для ОЧУ-каналів передачі від одного пункту на багато пунктів, причому зазначений спосіб виконують на стороні приймача ОЧУ-канала і він містить операції, згідно яким а) приймають сигнал потоку бітів даних, що надходить і містить поперемінні ПОСЛІДОВНОСТІ опорних та інформаційних кадрів, при цьому кож 10 ний із зазначених опорних кадрів, містить ВІДОМІ приймачу дані, б) виявляють зазначені опорні кадри в зазначеному сигналі потоку бітів даних ОЧУ-кадрів, що надходить, в) перетворюють зазначений потік ОЧУ-кадрів, що надходить, з часової області в частотну область, г) формують вектор корекції за допомогою зазначеної ПОСЛІДОВНОСТІ опорних кадрів і даних, відомих приймачу, для корекції помилок мовлення, що виникають через спотворення, викликаних зазначеним ОЧУ-каналом, д) коригують кожен інформаційний кадр із числа зазначених послідовностей інформаційних кадрів, приймаємих у зазначеному приймачі, за допомогою зазначеного вектора корекції для усунення спотворюючого впливу на зазначені кадри, обумовленого зазначеним ОЧУ-каналом Короткий опис креслень Даний винахід описується і пояснюється з посиланням на прикладені креслення, на яких Фіг 1 - зображує найкращий варіант реалізації даного винаходу у відношенні кадрової синхронізації, Фіг 2 - циклічний префікс для двох послідовних кадрів, Фіг 3 -типова ПОСЛІДОВНІСТЬ інформаційних кадрів, попередні ПОСЛІДОВНІСТЮ трьох опорних кадрів використаних для синхронізації на стороні приймача, Фіг 4 - застосування вирізуючої функції, чи функції віднімання для ПОСЛІДОВНОСТІ ОЧУ-кадрів, що надходять, з метою наближеного виявлення ПОСЛІДОВНОСТІ опорних кадрів, Фіг 5 - найкращий варіант реалізації даного винаходу у відношенні точного пошуку опорного кадру, Фіг 6 - блок-схема програми ініціалізації приймача ВІДПОВІДНО до найкращого варіанта реалізації даного винаходу, Фіг 7 - обробка інформаційного кадру ВІДПОВІДНО до найкращого варіанта реалізації даного винаходу, Фіг 8 - докладне зображення найкращого варіанта реалізації даного винаходу у відношенні корекції каналу Опис найкращих здійснень ВІДПОВІДНО ДО найкращого варіанта реалізації даного винаходу забезпечують спосіб кадрової синхронізації і корекції каналу при мовленні з ОЧУ, який забезпечує можливість точної передачі ОЧУданих, з усуненням необхідності того, щоб передавач що-небудь знав про стан каналу Цей спосіб особливо дометаний для немобільної, від одного пункту на багато пунктів, широкосмуговий передачі даних радіотехнічними засобами, коли застосовують велику КІЛЬКІСТЬ каналів, кожний з який має відмінну від інших власну характеристику Найкращий варіант даного винаходу, який відноситься до кадрової синхронізації, частково зображений на фіг 1 Ця фігура зображує методику рівня техніки для ОЧУ-модуляцм на стороні передавача і демодуляції даних на стороні приймача Фіг 1 також містить описані нижче об'єкти даного винаходу По-перше, на стороні передавача, зага 11 льний рядок 10 біт, що представляє значимі дані, які передаються з одного пункту в інший, подають у цифровий розщеплювач рядка 12, що розщеплює рядок 10 біт на окремі слова 14 біт, що мають заздалегідь визначену довжину У нашому прикладі використовують 6-бітові слова Потім кожне слово 14 обробляють цифровим модулем 16 відображення слів, який відображає слово в комплексну площину в один з можливих станів слова Оскільки слово 14 має 6-бітову довжину, то можливі 2 6 = 64 стани, тому кожний з чотирьох квадрантів комплексної площини складає 16 можливостей Результатом цієї операції є комплексне число 18 у вигляді А + Bj, яке представляє 6-бітове слово 14 Інформаційні слова послідовно розміщають у вигляді матриці 19, тим самим утворюючи одномірну матрицю 19 слів 18, яка має розмір величиною в один кадр інформації Потім модуль 20 зворотнього швидкого перетворення Фур'є(ЗШПФ) приймає як вхідний сигнал деякий ряд, що містить ДІЙСНІ частини комплексних чисел 18 і уявні частини цих же комплексних чисел 18, і виконує ЗШПФ цього ряду Результатом цього є швидке перетворення Фур'є, яке формує поперемінні тимчасові ряди даних, у результаті чого вхідний ряд перетворюють з частотної області в часову область Вихідним сигналом модуля 20 ЗШПФ є часовий ряд комплексних чисел 22 у виді С + Dj, де перший індекс представляє ДІЙСНІ частини С, а другий уявні частини D Кожний з цих індексів С і D характеризує значимий блок кадру ЗО даних - згідно фіг 1 Як і раніше, одномірна комплексна матриця 23 містить усі комплексні числа 22, які отримані в результаті операції ЗШПФ Оскільки часовий ряд представляє 1024 ПОСЛІДОВНІ слова, тому вихідним сигналом модуля 20 ЗПШФ є пара кадрів ЗО даних, кожний з який представляє 1024 слова 14 Кадр ЗО має вигляд аналогової кривої, Зображеної на фіг 1, але він фактично представлений рядом дискретних точок, кожна з який має свої координати в цифровому представленні Це - звичайна, відома з рівня техніки ОЧУ-обробка Кадрова синхронізація Наступна операція зображеного на фіг 1 способу є найкращим варіантом реалізації даного винаходу і відноситься до кадрової синхронізації Кадрова синхронізація означає, що приймач повинний виявляти деякий еталон по всьому сигналу бітів даних, що надходить і вказує початок кадрів Тому в найкращому варіанті реалізації даного винаходу, на стороні передавача, кожен кадр ЗО, що містить передані значимі дані, надходить у модуль 24 кадрової синхронізації передавача, функція якого полягає у введенні еталона перед кожним кадром, щоб дати можливість приймачу виявляти початок кадрів Фіг 2 більш наочно зображує кадри, які містять циклічний префікс 25, що складається з двох ідентичних сегментів 26 Одна з ознак даного винаходу, що має новизну, полягає втому, що кожен переданий кадр ЗО перетворюють таким чином, що сегмент даних 26 даного кадру копіюють і додають до початку кадру, тим самим формуючи кадр 28, довжина якого перевищує сегмент ЗО значимих даних, що містить корисні дані Цей сегмент значимих даних ЗО містить корисні дані, які передані з передавача в один чи декілька при 56302 12 ймачів При формуванні циклічного префікса менший сегмент 26 даних, який переважно має приблизно 10% довжини блоку ЗО, що містить значимі дані, копіюють і додають до початку блоку ЗО, тим самим збільшуючи довжину кадру тільки на 10% Процес формування циклічного префікса 25 здійснюють і в опорних кадрах, і в кадрах даних, і результат цього полягає в тім, що кожен переданий кадр починається і закінчується одним й тим самим сегментом 26 даних Ці ідентичні сегменти 26 у кадрі 28 використовують, на стороні приймача, для виявлення початку кадрів ВІДПОВІДНО ДО докладно описаного нижче способу У найкращому варіанті реалізації даного винаходу передавач переважно направляє, через заздалегідь визначені інтервали, ПОСЛІДОВНОСТІ З трьох послідовних опорних кадрів 34 між послідовностями з близько 100 інформаційних кадрів 36 Всі опорні кадри містять ідентичні дані, ВІДОМІ приймачу, і ці опорні кадри використовують з метою кадрової синхронізації Приклад кадрових послідовностей, що направляються передавачем 8, зображений на фіг З У найкращому варіанті реалізації даного винаходу модуль 32 кадрової синхронізації приймача повинен виконувати дві задачі перша - визначення місця розташування ПОСЛІДОВНОСТІ опорних кадрів 34 між двома послідовностями інформаційних кадрів 36, і друга - точне визначення місця розташування першої вибірки даних першого опорного кадру 34 даної ПОСЛІДОВНОСТІ опорних кадрів Точне виявлення початку опорних кадрів необхідно для наступного виконання корекції каналу Як було вказано вище, опорними кадрами 34 є інформаційні кадри, ВІДОМІ приймачу 40 і переважно направляємих передавачем 8 у послідовностях трьох послідовних кадрів через заздалегідь визначені інтервали між інформаційними кадрами 36, згідно фіг 3 Можуть бути використані та ІНШІ ПОСЛІДОВНОСТІ, що містять один, чи більше опорних кадрів Приймач 40 може використовувати модуль 38 кадрової синхронізації для визначення місця розташування опорних кадрів 34 шляхом порівняння послідовностей даних, що знаходяться на початку і КІНЦІ кадру і відокремлюваних довжиною, рівній довжині даного кадру, або перевищуючої неї Принцип, згідно фіг 4, полягає у виконанні виднімання між двома, котрі передбачаються ідентичними, секціями даних, однієї - на початку опорного кадру 34, і іншої - у його КІНЦІ У ДІЙСНОСТІ ЦІ ДВІ ПОСЛІДОВНОСТІ більш не ідентичні, а тільки близькі до ідентичності, оскільки ОЧУ-канал спотворив дані під час мовлення Це спотворення являє собою ВІДМІННІСТЬ виду даних різниця між переданими даними і прийнятими даними Основна частина спотворень відбувається при передачі в ефірі електромагнітних хвиль, при цьому невелика частина спотворення викликається гетеродинами IQ модулятора 35 і IQ демодулятора 37, а також іншими електронними компонентами Функцію віднімання застосовують по всьому діапазону ПОСЛІДОВНОСТІ трьох опорних кадрів згідно фіг 4, і вона робить деякий мінімум у МІСЦІ розташування перших двох опорних кадрів з числа ПОСЛІДОВНОСТІ трьох опорних кадрів Спочатку виконують наближене виявлення 14 13 56302 опорного кадру Наявність ПОСЛІДОВНОСТІ трьох можна пропустити після ініціалізації приймача Але опорних кадрів 34 виявляють за допомогою алгоколи спотворення досягнуть точки, на якій відстеритму на основі наступної вирізуючої функції, чи ження початку кадрів стає неможливим, процес функції віднімання приведення приймача у початковий стан і повторення пошуку початку опорних кадрів можна почати повторно Після виконання наближеного пошуку опорноде х - індекс вибірки, k - довільний "розмір виго кадру і точного пошуку опорного кадру алгорізання", D - набір даних, N - число вибірок в одритм кореляції часової області можна застосувати ному, чи більше кадрів даних для опорних даних з метою корекції зсуву частоти, Коли відповідна стандартна програма визнащо представляє собою явище спотворення даних, чить місце розташування зрізу функції W(x), вона викликане невеликими змінами гетеродинів з боку знаходить місце розташування ПОСЛІДОВНОСТІ опопередавача і приймача Принцип полягає у викорного кадру 34 тільки приблизно Мета цієї першої нанні кореляції між першим і другим опорними стандартної програми пошуку полягає у визначенні кадрами в часовій області за допомогою коефіціємісця розташування зрізу 39 кривої функції віднінта кореляції є у часовій області Величина є вимання тільки приблизно Потім застосовують іншу значається за наступною формулою програму для точного знаходження місця розташування першої вибірки даних опорних кадрів 34 [a] - кут комплексної величини а, Цю операцію виконують за допомогою процесу, аналогічного першому Як згадувалося вище, на стороні передавача кінцевий сегмент 26 кожного Nff - об'єм швидкого перетворення Фур'є, кадру 22 копіюють і додають до початку згаданого зірочка позначає комплексно сполучене число, кадру 22, тим самим формуючи циклічний префікс х2 - вихідна точка, отримана точним пошуком 25 ВІДПОВІДНО до зображення на фіг 2 Циклічний опорного кадру префікс 25 містить два ідентичних сегменти 26 У цьому варіанті здійснення розглянутого меданих, з яких один знаходиться на початку кадру, а тоду може бути доцільним усереднення двох знаінший - наприкінці кадру Циклічний префікс 25 чень є з метою отримання більш точного значення виконує дві функції перша - захист кадрів від обуПерше значення є отримують шляхом обчислення мовленого імпульсною перехідною характеристипершого і другого опорного кадрів, а друге значенкою проникнення сигналів з попереднього кадру, ня отримують шляхом обчислення другого і трещо таким чином захищає систему від впливу з тього опорних кадрів з числа ПОСЛІДОВНОСТІ трьох боку міжсимвольної перешкоди, друга, і більш ваопорних кадрів Це значення є більш кращим чижлива для кадрової синхронізації функція - забезном характеризує корекцію зсува частоти для сепечення способу застосування варіанта функції реднього значення трьох послідовних опорних W(x), названої w(x), у результаті чого w(x) одержує кадрів, прийнятих протягом тривалого періоду чамінімум на початку опорного кадру 10 Потім w(x) су має той же вид, як і W(x), але має ІНШІ параметри k тепер є довжиною у вибірках циклічного префікПризначення приймача при виявленні трьох са, D - набір даних, що вводиться, N - довжина у опорних кадрів 34 полягає в їхньому застосуванні вибірках одного telipy* мінус додаткова частина, для придбання інформації про стан ОЧУ-канала у віддана циклічним префіксом, і х залишається інвідношенні присутнього в цей час ступеня спотводексом даних Друга програма зображена на фіг 5 і рення даних на цьому каналі Фіг 6 можна розглянагадує першу програму, з тією різницею, що її дати як продовження фіг1, і вона в основному застосовують тільки для першого опорного кадру зображує блок-схему модуля 50 корекції каналу 34 ПОСЛІДОВНОСТІ опорних кадрів її призначення приймача При надходженні даних до приймача полягає в тому, щоб простежити криву порівняння виявлення кадру здійснюють за допомогою згададвох сегментів 24 циклічного префікса 25 цього ної вище вирізуючої функції, і и варіанта Наступна кадру Оскільки передбачається, що ці два сегмеоперація після знаходження початку опорного каднти 26 є ідентичними, тому ця програма буде мати ру - і, тому, усіх кадрів, тому що ЦП може простемінімум 43 у МІСЦІ розташування оптимальної ВІДжувати індекс введення, - полягає в перетворенні ПОВІДНОСТІ Це місце розташування виявляють і даних у частотну область Це здійснюють за доповикористовують як вихідну точку кадрової синхромогою алгоритму ШПФ Можна використовувати нізації для зчитування наступних даних Дві проспосіб підстави - 4, і обробку виконують у реальграми, які використовуються послідовно в поєдному часі нанні одна з іншою, точно виявляють справжній Необхідно відзначити, що вище приводився початок першого опорного кадру 34 у ПОСЛІДОВНОСопис тільки найкращого варіанта реалізації даного ТІ кадрів винаходу Але ІНШІ варіанти даного способу кадрової синхронізації також входять у загальний діаУ найкращому варіанті реалізації даного винапазон даного винаходу Наприклад, очевидно, що ходу наближений пошук опорного кадру і точний можна також використовувати ПОСЛІДОВНОСТІ ІНШИХ пошук опорного кадру виконують тільки тоді, коли чисел опорних кадрів, або замість виконання двох приймач включений, і поки не буде виявлена вихіпослідовних пошуків вихідної точки кадрової синдна точка кадрової синхронізації Після цього прохронізації можна також ВІДПОВІДНО ДО даного споцесор може простежити початок кожного наступнособу виконати меншеє чи більшеє число пошуків го кадру оскільки всі кадри мають заздалегідь У широкому ЗМІСТІ концепції даного винаходу оповизначену довжину, і тому виконання цих операцій рні кадри можуть більше не знадобиться, і синхроW ( x ) = 2 І = 0 [ D ( x + І ) D ( x + І + N ) ] 16 15 56302 нізацію кадрів можна виконувати за допомогою конати більше одного разу, і якщо при кожному того ж способу віднімання, застосованого тільки у виконанні цієї операції результат не буде досить відношенні сегментів 26 циклічного префікса Тоді точним, то вихідну точку ШПФ третього опорного будуть визначати місце розташування деякого кадру в даній ПОСЛІДОВНОСТІ можна змістити на мінімуму, що забезпечить вихідну точку кадрової одну вибірку даних назад При знаходженні місця синхронізації Для поліпшення результату кадрову розташування, що дає точний вектор корекції, і синхронізацію можна удосконалити, якщо кадри після формування вектора корекції цю вихідну будуть приймати шляхом застосування функції точку з мінімальною похибкою використовують для віднімання по кожному циклічному префіксу, що всієї наступної обробки і зчитування даних Обчинадходить, протягом деякого періоду часу слюють остаточний вектор корекції, і кожен наступний інформаційний кадр 36 множать на один й Корекція каналу той самий вектор корекції у ВІДПОВІДНОСТІ З наступНайкращий варіант даного винаходу являє соним алгоритмом бою стандартну програму корекції для ОЧУканалов, що обробляє дані частотної області ВекІ в = 1 * V e q *ЕХР(і2яє) тор корекції, застосований для вирівнювання сигналу бітів даних, що надходить, можна обновити у l eq - скоригований кадр даних, І - спотворений кожному випадку появи трьох опорних кадрів, що кадр даних, Veq - вектор корекції, є - коефіцієнт виникають приблизно кожні 100 кадрів Вище згакореляції дувалося, що сигнал бітів даних, що надходить, Ця операція призначається для того, щоб скомістить опорні кадри 34, що є даними, відомими ригувати спотворення, викликане ОЧУ-каналом, у приймачу, а вибірка 45 даних опорного кадру вбукадрах даних(шляхом множення на вектор корекції дована на стороні приймача в запам'ятовуючому Veq), і також скоригувати зсув частоти для кадрів пристрої 52, такому як ЕСППЗП, у власних схемах даних(шляхом множення на ЕХР(і2ттє)) приймача Фіг 8 зображує докладну блок-схему Фіг 6 зображує загальну блок-схему функціюкорекції каналу приймача Після визначення місця вання програми ініціалізації приймача, що виконурозташування опорних кадрів 34 за допомогою ється кожний раз при включенні приймача Пристандартних програм виявлення кадрів перша значення цієї програми полягає у визначенні місця операція буде полягати у введенні їх у частотну розташування оптимальної точки в часі для початобласть за допомогою модуля 54 ШПФ Потім коку зчитування даних, що надходять, і, з цієї точки, жен кадр із числа двох перших опорних кадрів 34, у продовженні спостереження за вихідними точкаприйнятих по ОЧУ-каналу, поділяють на точну вими кожного кадру даних, що надходить ВІДПОВІДНО бірку 45 опорного кадру, що міститься в запам'ятодо фіг 6 після виконання двох операцій пошуку вуючому пристрої 52, і отримані таким чином два опорного кадру і знаходження в ПОСЛІДОВНОСТІ результати є зворотніми величинами амплітудноопорних кадрів вихідної точки першої вибірки опочастотної характеристики ОЧУ-канала Ці резульрних кадрів опорні кадри корелюють у часову обтати усереднюють, що дає більш точний вектор ласть для корекції впливу зсуву частоти Потім В корекції, що характеризує середнє спотворення, опорних кадрах, виконують ШПФ і формують перобумовлене ОЧУ-каналом у двох послідовних кадший вектор корекції ВІДПОВІДНО до способу, зобрарах женому на фіг 8 Цей вектор проходить кількараУ найкращому варіанті реалізації даного виназову перевірку, що передбачає порівняння ходу замість виконання звичайного усереднення результату з точним опорним кадром 45, до тих двох векторів у математичній операції також запір, поки не буде знайдена оптимальна вихідна стосовують коефіцієнт кореляції з метою виклюточка для наступного зчитування даних, що надчення проблеми зсуву частоти, що докладно опиходять сано вище в даній заявці Застосовувана при Фіг 7 зображує обробку інформаційного кадру цьому формула після формування точного вектора корекції Всі інформаційні кадри, що надходять, піддають проЕХР(2ліє)] v e q = - i v , eq1 цесу, ВІДПОВІДНО до якого усувають циклічний преде Veq - усереднений вектор корекції, V eq i - пефікс 25 і потім їх корелюють у часовій області для усунення впливу зсуву частоти Потім ВСІ ВОНИ підрший ВеКТОр КОреКЦІІ, Veq2 - ДРУГИЙ ВЄКТОр КОреКЦІІ, даються обробці оператором ШПФ, і далі їх поі - уявна єдність, є - коефіцієнт кореляції множують на вектор корекції в порядку, що виклаУ результаті цієї операції отримують більш тодений вище - для усунення спотворення, чний вектор корекції, що представляє зворотню викликаного в них ОЧУ-каналом Нарешті, кадри величину амплітудно-частотної характеристики піддають зверненому відображенню, і цифрові каналу зв'язку 3 метою відфільтрування помилкодані виводять у блок обробки даних приймача вих ПІКІВ та шуму у відношенні цього вектора можна застосувати ІНШІ алгоритми, що згладжують В іншому кращому варіанті реалізації даного Вектор корекції потім помножують, компонент за винаходу наступну перевірку даних можна виконакомпонентом, на вибірки, взяті з третього опорного ти на стороні приймача, щоб гарантувати відновкадру, прийнятого в ПОСЛІДОВНОСТІ трьох опорних лення даних у точному виді Перевірка стану відкадрів, тим самим коригують його та усувають новлених інформаційних кадрів може бути ефект спотворення каналу Цей від коригований виконана за допомогою дуже невеликих вибірок третій опорний кадр при цьому повинний дорівнюінформації, що містяться в кожному інформаційвати точному опорному кадру 45, що міститься в ному кадрі 36,що називаються керуючими сигназапам'ятовуючому пристрої 52 приймача Перед лами Ці керуючі сигнали являють собою дуже продовженням цієї програми перевірку можна ви 18 17 56302 дку появи опорних кадру, що виникають один раз невеликі послідовності даних, що містять інфорна кожні, приблизно, 100 кадрів даних; і кадри дамацію, відому приймачу, подібні до опорних кадних поновлюють за допомогою вектора корекції рів. Тому після корекції кожного інформаційного відповідно до викладеного вище. У деяких випадкадру за допомогою вектора корекції ці керуючі ках, коли спотворення ОЧУ-канала невелике і посигнали можна перевірити, і якщо вони починають стійне, поновлення вектора корекції можна викозміщуватися відносно своїх передбачених знанувати ще рідше, наприклад при кожній третій чень, то сигнал зворотного зв'язку можна направипояві послідовності опорних кадрів. Далі немає ти для відновлення вектора корекції за допомогою необхідності виконувати наближений пошук опорзначень зсуву керуючих сигналів. Як згадувалося ного кадру і точний пошук опорного кадру, оскільки вище в даній заявці, після знаходження точного відомо точне місце розташування опорних кадрів. місця розташування опорних кадрів за допомогою Цим заощаджується час і поліпшуються робочі модуля наближеного і точного пошуку опорного характеристики приймача. кадру(при першому включенні приймача) вектор корекції потім тільки поновлюють в кожному випа A'»B"j І АЩ І І У \ значний S5 26 txi значний 11 X IT! 3? 35. IQ модуляція 'IQ демодуляція антена , антена • I 1 ! передавач передавач № Фіг. 1 Фіг. З її 19 20 56302 ДАНІ - —™%8Ґ --m щ щ Результат віднімання Фіг 4 ДАНІ Результат віднімання ЧАС Фіг. 5 наближений пошук опорного» точний пошук опорного кореляція опорних по часовій області ШПФ опорних формування вектора корекції коригування 3-го опорного иЪу> повторне рахування ШПФ 3-го опорного починаючи на одну виборку раніше перевірка на наявність помилки 3-го опорного визначення оптимальної вихщно? точки Фіг 6 21 56302 22 введення Yjkh^b даних вилучення циклічного префіксу з pt)pv даних, множення на корекцію зсуву частоти ШПФ для кож ного wO fу даних корекція M l f'6 даних за допомогою вектора корекції обернене відображення і виведення ziQpb даних виведення вїдкоригованих tuft .даних Фіг. 7 Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of frame synchronization for orthogonal frequency division multiplex (ofdm) communication system
Назва патенту російськоюСпособ кадровой синхронизации в системе связи с ортогональным частотным уплотнением (ofdm)
МПК / Мітки
МПК: H04J 11/00
Мітки: кадрової, частотного, системі, ортогонального, спосіб, ущільнення, використанням, стабілізації, синхронізації
Код посилання
<a href="https://ua.patents.su/11-56302-sposib-kadrovo-sinkhronizaci-ta-stabilizaci-sistemi-z-vikoristannyam-ortogonalnogo-chastotnogo-ushhilnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб кадрової синхронізації та стабілізації системи з використанням ортогонального частотного ущільнення</a>
Спосіб частотного ущільнення вузькосмугових інформаційних каналів
Номер патенту: 47835
Опубліковано: 15.07.2002
Автори: Смоляр Віктор Григорович, Слюсар Вадим Іванович
Мітки: вузькосмугових, спосіб, частотного, ущільнення, інформаційних, каналів
Формула / Реферат:
1. Спосіб частотного ущільнення вузькосмугових інформаційних каналів, який полягає в тому, що в передавачі здійснюють багаточастотне кодування інформаційного сигналу з заданим фіксованим рознесенням несучих за підканалами, сформований багаточастотний сигнал далі каналізують на приймальний пристрій, де над прийнятим інформаційним сигналом здійснюють операцію аналого-цифрового перетворення, формування квадратурних складових та швидкого...
Спосіб частотного ущільнення вузькосмугових інформаційних каналів
Номер патенту: 47918
Опубліковано: 15.07.2002
Автори: Слюсар Вадим Іванович, Смоляр Віктор Григорович, Степанець Анатолій Михайлович, Слюсар Ігор Іванович
Мітки: ущільнення, каналів, вузькосмугових, частотного, інформаційних, спосіб
Формула / Реферат:
1. Спосіб частотного ущільнення вузькосмугових інформаційних каналів, який полягає в тому, що в передавачі здійснюють багаточастотне кодування інформаційного сигналу з заданим фіксованим рознесенням несучих за підканалами, сформований багаточастотний сигнал далі каналізують на приймальний пристрій, де над прийнятим інформаційним сигналом здійснюють операцію аналого-цифрового перетворення (АЦП), формування квадратурних складових та швидкого...
Пристрій відновлення синхронізації для синхронної цифрової ієрархічної системи передачі даних
Номер патенту: 45398
Опубліковано: 15.04.2002
Автор: Слатер Іаін Джеймс
Мітки: синхронної, даних, синхронізації, пристрій, передачі, ієрархічної, цифрової, системі, відновлення
Формула / Реферат:
1. Пристрій відновлення синхронізації для синхронної цифрової ієрархічної (SDH) системи передачі даних, за допомогою якого треті сторони можуть використовувати SDH канал, що містить вхід для прийому мультиплексованого сигналу модуля синхронної передачі (STM), схему (20) відновлення синхронізації для відновлення синхронізуючого сигналу з STM сигналу, демультиплексор (21) для демультиплексування STM сигналу на множину сигналів підпорядкованих...
Система запирання вала синхронізації пристрою реверсування тяги та синхрозамок для системи запирання вала синхронізації пристрою реверсування тяги реактивного двигуна
Номер патенту: 29480
Опубліковано: 15.11.2000
Автори: Гукер Марк Дж., Сміт Марк Х., Джексон Джон
Мітки: синхрозамок, реверсування, синхронізації, вала, система, двигуна, запирання, системі, пристрою, тяги, реактивного
Текст:
...с каждым приводом 5 через валы синхронизации 6, а линия 23 давления убирания соединена с каждым приводом 5 индивидуально. В предпочтительном варианте распределительный клапан 19 управляет перемещением поршня привода через два базовых положения. В первом положении распределительный клапан 19 соединяет нагнетательную линию 20 с линией 22 давления выдвижения, а возвратную линию 21 с линией 23 давления убирания. Поскольку линия давления...
Пристрій для синхронізації системи імпульсно-фазового керування тиристорним перетворювачем
Номер патенту: 21549
Опубліковано: 16.12.1997
Автори: Землянський Андрій Ігоревич, Чікалов Віталій Іванович, Чикалов Федір Віталійович, Корнієнко Анатолій Прокопович
МПК: H02M 1/08
Мітки: керування, перетворювачем, тиристорним, синхронізації, системі, пристрій, імпульсно-фазового
Формула / Реферат:
Устройство для синхронизации системы импульсно-фазового управления тиристорним преобразователем, содержащее три усилителя-ограничителя, входы которых подсоединены к клеммам для подключения фаз сети переменного тока, три логических элемента И-НЕ, первые входы которых подключены к выходам соответствующих усилителей-ограничителей, отличающееся тем, что в него введены три двухвходовых элемента ИЛИ и три RS триггера, а элементы И-НЕ выполнены...
Попередній патент: Спосіб ранньої діагностики раку щитовидної залози на фоні багатовузлового еутиреоїдного зоба
Наступний патент: Підземний тунель для сейсмічних районів
Випадковий патент: Спосіб диференційованої профілактики пізнього гестозу у вагітних з цукровим діабетом