Спосіб стабілізації реактивної потужності синхронного генератора шляхом слідкуючого корегування його напруги збудження
Номер патенту: 56989
Опубліковано: 10.02.2011
Автори: Білоконь Олександра Леонідівна, Рябенький Володимир Михайлович, Ушкаренко Олександр Олегович

Формула / Реферат
Спосіб стабілізації реактивної потужності синхронного генератора шляхом слідкуючого корегування його струму збудження, в якому перетворюють вихідну напругу генератора Uвих в аналоговий сигнал ![]() Uвих за допомогою функціональної структури Uвих,
Uвих за допомогою функціональної структури Uвих, ![]() Uвих для подальшого порівняння його з опорною напругою Ucosφ і формують керуючий сигнал, який після підсилення подають на кільцевий розподільник імпульсів, котрим формують послідовні керуючі імпульси Uφ1.n, Uφ2.n і Uφ3.n, де n - неперервна послідовність конкретних значень аналогових сигналів керуючих імпульсів у функціональній структурі демодулятора f(Demux), які подають на силові тиристори для формування синхронізованої напруги та струму збудження синхронного генератора, який відрізняється тим, що перетворений аналоговий сигнал вихідної напруги
Uвих для подальшого порівняння його з опорною напругою Ucosφ і формують керуючий сигнал, який після підсилення подають на кільцевий розподільник імпульсів, котрим формують послідовні керуючі імпульси Uφ1.n, Uφ2.n і Uφ3.n, де n - неперервна послідовність конкретних значень аналогових сигналів керуючих імпульсів у функціональній структурі демодулятора f(Demux), які подають на силові тиристори для формування синхронізованої напруги та струму збудження синхронного генератора, який відрізняється тим, що перетворений аналоговий сигнал вихідної напруги ![]() Uвих та струму
Uвих та струму ![]() Івих перетворюють в структуру аналогових логічних сигналів вихідної напруги [Uj]вих та вихідного струму [Ij]вих шляхом порівняння їх з структурою еталонних напруг [Uj] за допомогою функціональних структур f1(АЦП) та f2(AЦП) аналого-цифрового перетворювача, де j - число інформаційних логічних аналогових сигналів, які одночасно аналізуються функціональною структурою
Івих перетворюють в структуру аналогових логічних сигналів вихідної напруги [Uj]вих та вихідного струму [Ij]вих шляхом порівняння їх з структурою еталонних напруг [Uj] за допомогою функціональних структур f1(АЦП) та f2(AЦП) аналого-цифрового перетворювача, де j - число інформаційних логічних аналогових сигналів, які одночасно аналізуються функціональною структурою ![]() , що виконує процедуру логічного обчислення інформаційного коефіцієнта потужності, і функціональною структурою f1(Sign) формування логічного аналогового сигналу позитивного значення +UL1, який відповідає індуктивній реактивній потужності генератора, чи логічного аналогового сигналу від'ємного значення –UC1, який відповідає ємнісній реактивній потужності генератора, при цьому в результаті аналізу у функціональній структурі коефіцієнта потужності
, що виконує процедуру логічного обчислення інформаційного коефіцієнта потужності, і функціональною структурою f1(Sign) формування логічного аналогового сигналу позитивного значення +UL1, який відповідає індуктивній реактивній потужності генератора, чи логічного аналогового сигналу від'ємного значення –UC1, який відповідає ємнісній реактивній потужності генератора, при цьому в результаті аналізу у функціональній структурі коефіцієнта потужності ![]() формують логічну структуру аналогових сигналів
формують логічну структуру аналогових сигналів ![]() тривалістю
тривалістю ![]() t, що відповідає часу між моментами переходу аналогового сигналу вихідної напруги Uвих та струму Івих генератора через нульовий рівень f(U,Iвих
t, що відповідає часу між моментами переходу аналогового сигналу вихідної напруги Uвих та струму Івих генератора через нульовий рівень f(U,Iвих![]() 0), при цьому порівняння його з опорною напругою Ucosφ, який відповідає наперед заданому cosφ, зі структурою еталонних напруг [Uj] та перетворюють його у структуру логічних аналогових сигналів [Uj]cosφ за допомогою функціональної структури f3(АЦП) аналого-цифрового перетворювача, які потім логічно підсумовують за допомогою функціональної структури суматора
0), при цьому порівняння його з опорною напругою Ucosφ, який відповідає наперед заданому cosφ, зі структурою еталонних напруг [Uj] та перетворюють його у структуру логічних аналогових сигналів [Uj]cosφ за допомогою функціональної структури f3(АЦП) аналого-цифрового перетворювача, які потім логічно підсумовують за допомогою функціональної структури суматора ![]() зі структурою логічних аналогових сигналів
зі структурою логічних аналогових сигналів ![]() та формують як структуру логічних аналогових сигналів [Uj] похибки ε та структуру аналогових сигналів [Uj]d
та формують як структуру логічних аналогових сигналів [Uj] похибки ε та структуру аналогових сигналів [Uj]d![]() швидкості зміни похибки ε, так і аналізують структуру логічних аналогових сигналів [Uj]
швидкості зміни похибки ε, так і аналізують структуру логічних аналогових сигналів [Uj]![]() похибки ε за допомогою функціональної структури знака реактивної потужності f2(Sign) і формують другий логічний аналоговий сигнал позитивного значення +UL2, який відповідає індуктивній реактивній потужності генератора, чи другий логічний аналоговий сигнал від'ємного значення -UC2, який відповідає ємнісній реактивній потужності генератора, при цьому перетворюють логічні структури аналогових сигналів похибки [Uj]
похибки ε за допомогою функціональної структури знака реактивної потужності f2(Sign) і формують другий логічний аналоговий сигнал позитивного значення +UL2, який відповідає індуктивній реактивній потужності генератора, чи другий логічний аналоговий сигнал від'ємного значення -UC2, який відповідає ємнісній реактивній потужності генератора, при цьому перетворюють логічні структури аналогових сигналів похибки [Uj]![]() та швидкості зміни похибки [Uj]d
та швидкості зміни похибки [Uj]d![]() з урахуванням перших логічних аналогових сигналів +UL1 та –UC1 за допомогою функціональної структури з нечіткою логікою f(Fuzzy) у послідовність імпульсних аналогових сигналів U(
з урахуванням перших логічних аналогових сигналів +UL1 та –UC1 за допомогою функціональної структури з нечіткою логікою f(Fuzzy) у послідовність імпульсних аналогових сигналів U(![]() t,T) тривалістю
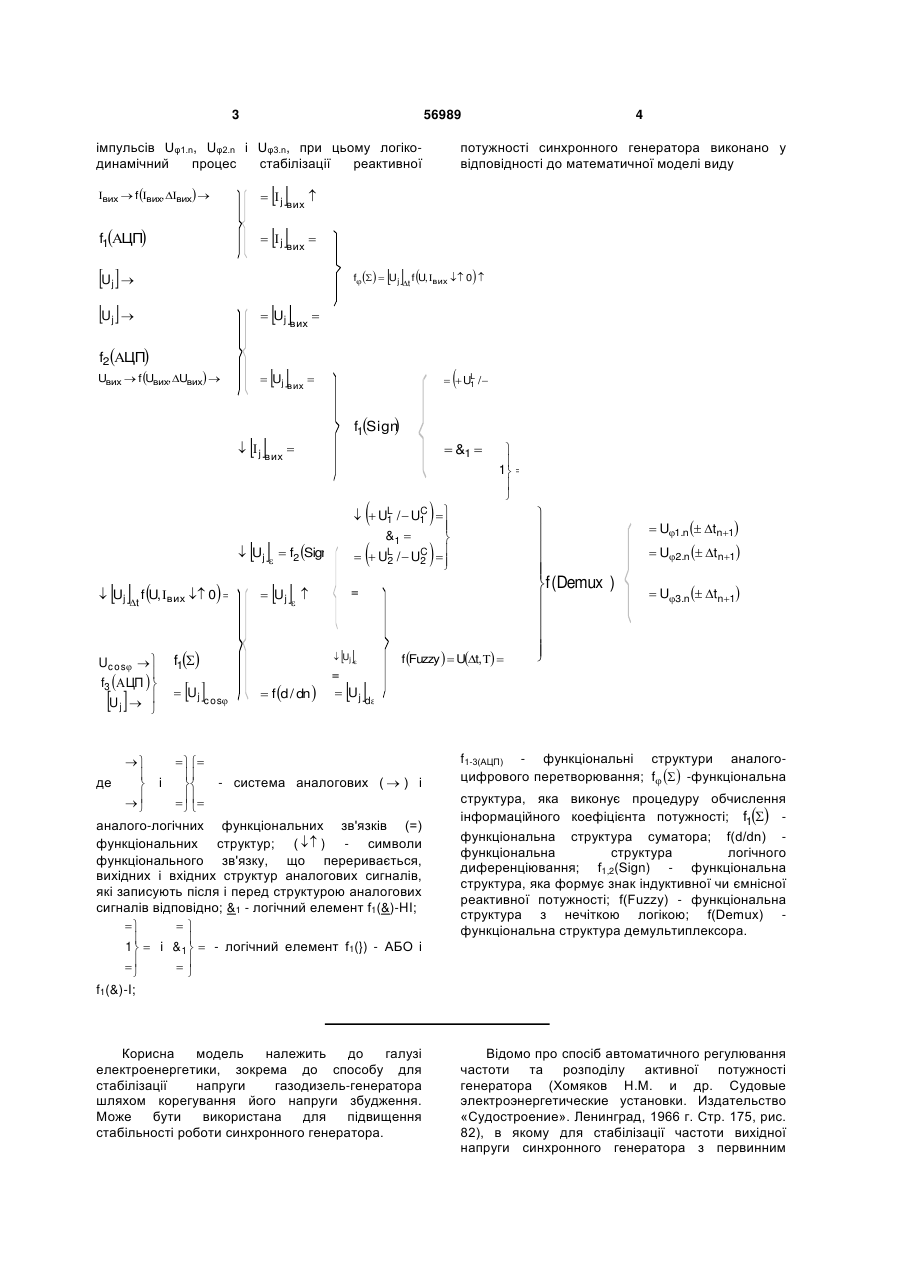
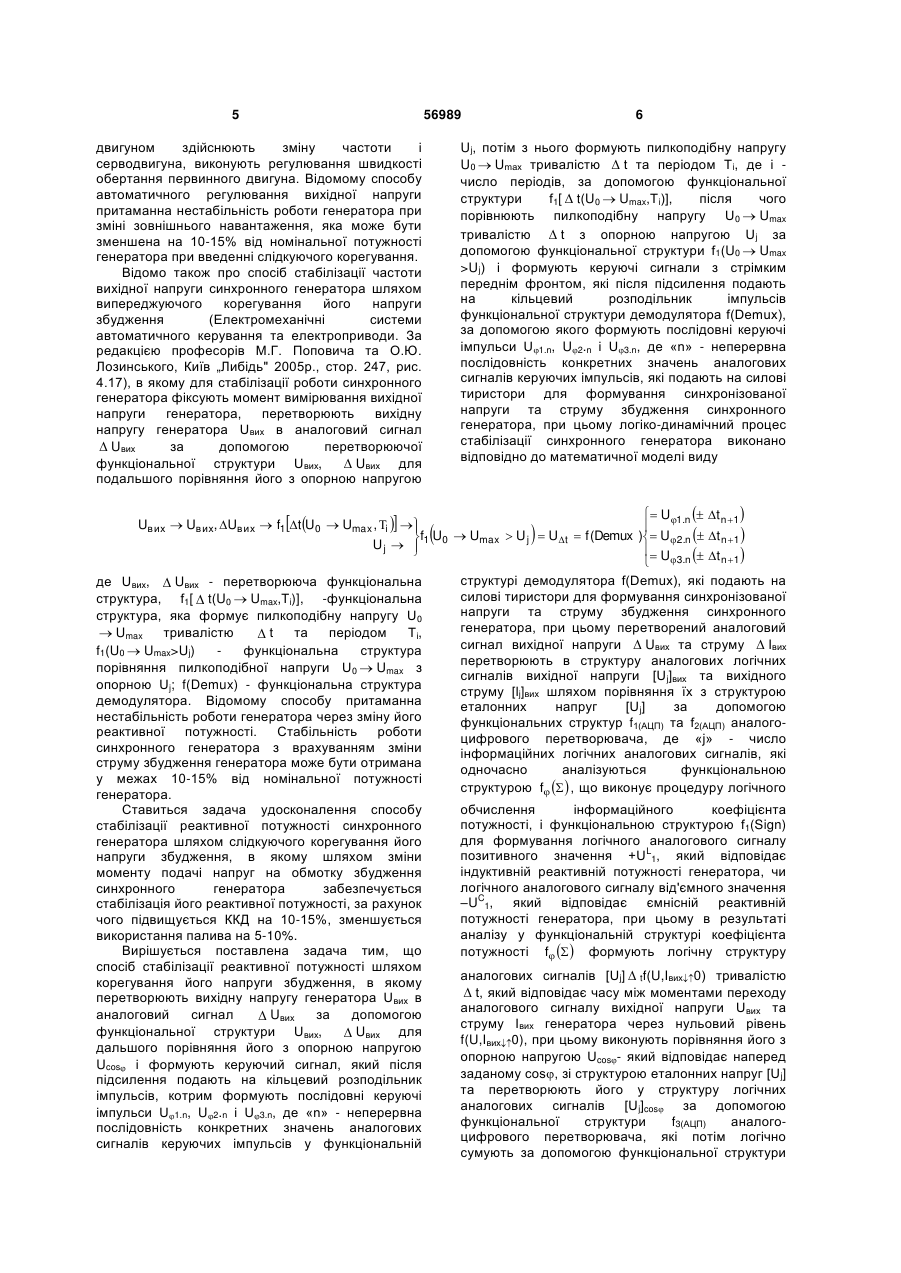
t,T) тривалістю ![]() t та періодом Т, одночасно з цим виконується порівняльний аналіз перших та других аналогових сигналів +UL1, -UC1 та +UL2, -UC2 за допомогою функціональної логічної структури з логічними елементами f1(&)-TA, f1(&)-Hi і f1(})-АБО та корегують початок формування послідовних керуючих імпульсів Uφ1.n+1, Uφ2.n+1, Uφ3.n+1 в функціональній структурі демодулятора f(Demux) з випередженням чи відставанням відносно початку формування попередньої послідовності керуючих імпульсів Uφ1.n, Uφ2.n і Uφ3.n, при цьому логіко-динамічний процес стабілізації реактивної потужності синхронного генератора виконано у відповідності до математичної моделі виду
t та періодом Т, одночасно з цим виконується порівняльний аналіз перших та других аналогових сигналів +UL1, -UC1 та +UL2, -UC2 за допомогою функціональної логічної структури з логічними елементами f1(&)-TA, f1(&)-Hi і f1(})-АБО та корегують початок формування послідовних керуючих імпульсів Uφ1.n+1, Uφ2.n+1, Uφ3.n+1 в функціональній структурі демодулятора f(Demux) з випередженням чи відставанням відносно початку формування попередньої послідовності керуючих імпульсів Uφ1.n, Uφ2.n і Uφ3.n, при цьому логіко-динамічний процес стабілізації реактивної потужності синхронного генератора виконано у відповідності до математичної моделі виду
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
=
![]()
![]()

![]()
![]() =
=
![]()
![]()
![]()
![]()
де ![]() і
і ![]() - система аналогових (
- система аналогових (![]() ) і аналого-логічних функціональних зв'язків (=) функціональних структур; (
) і аналого-логічних функціональних зв'язків (=) функціональних структур; (![]() ) - символи функціонального зв'язку, що переривається, вихідних і вхідних структур аналогових сигналів, які записують після і перед структурою аналогових сигналів відповідно; &1 - логічний елемент f1(&)-HI;
) - символи функціонального зв'язку, що переривається, вихідних і вхідних структур аналогових сигналів, які записують після і перед структурою аналогових сигналів відповідно; &1 - логічний елемент f1(&)-HI;
![]() і
і ![]() - логічний елемент f1(}) - або і f1(&)-i;
- логічний елемент f1(}) - або і f1(&)-i;
f1-3(АЦП) - функціональні структури аналого-цифрового перетворювання; ![]() -функціональна структура, яка виконує процедуру обчислення інформаційного коефіцієнта потужності;
-функціональна структура, яка виконує процедуру обчислення інформаційного коефіцієнта потужності; ![]() - функціональна структура суматора; f(d/dn) - функціональна структура логічного диференціювання; f1,2(Sign) - функціональна структура, яка формує знак індуктивної чи ємнісної реактивної потужності; f(Fuzzy) - функціональна структура з нечіткою логікою; f(Demux) - функціональна структура демультиплексора.
- функціональна структура суматора; f(d/dn) - функціональна структура логічного диференціювання; f1,2(Sign) - функціональна структура, яка формує знак індуктивної чи ємнісної реактивної потужності; f(Fuzzy) - функціональна структура з нечіткою логікою; f(Demux) - функціональна структура демультиплексора.
Текст
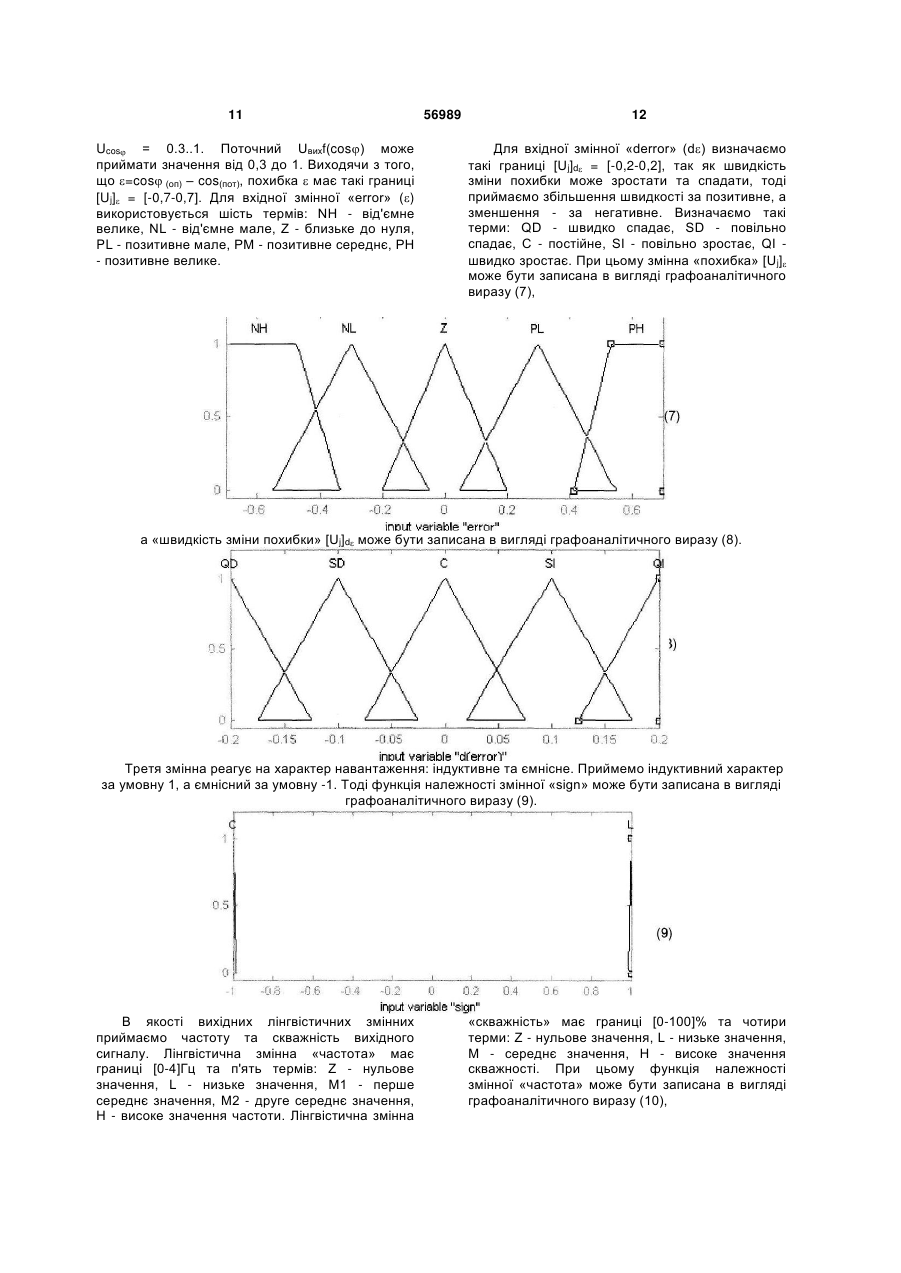
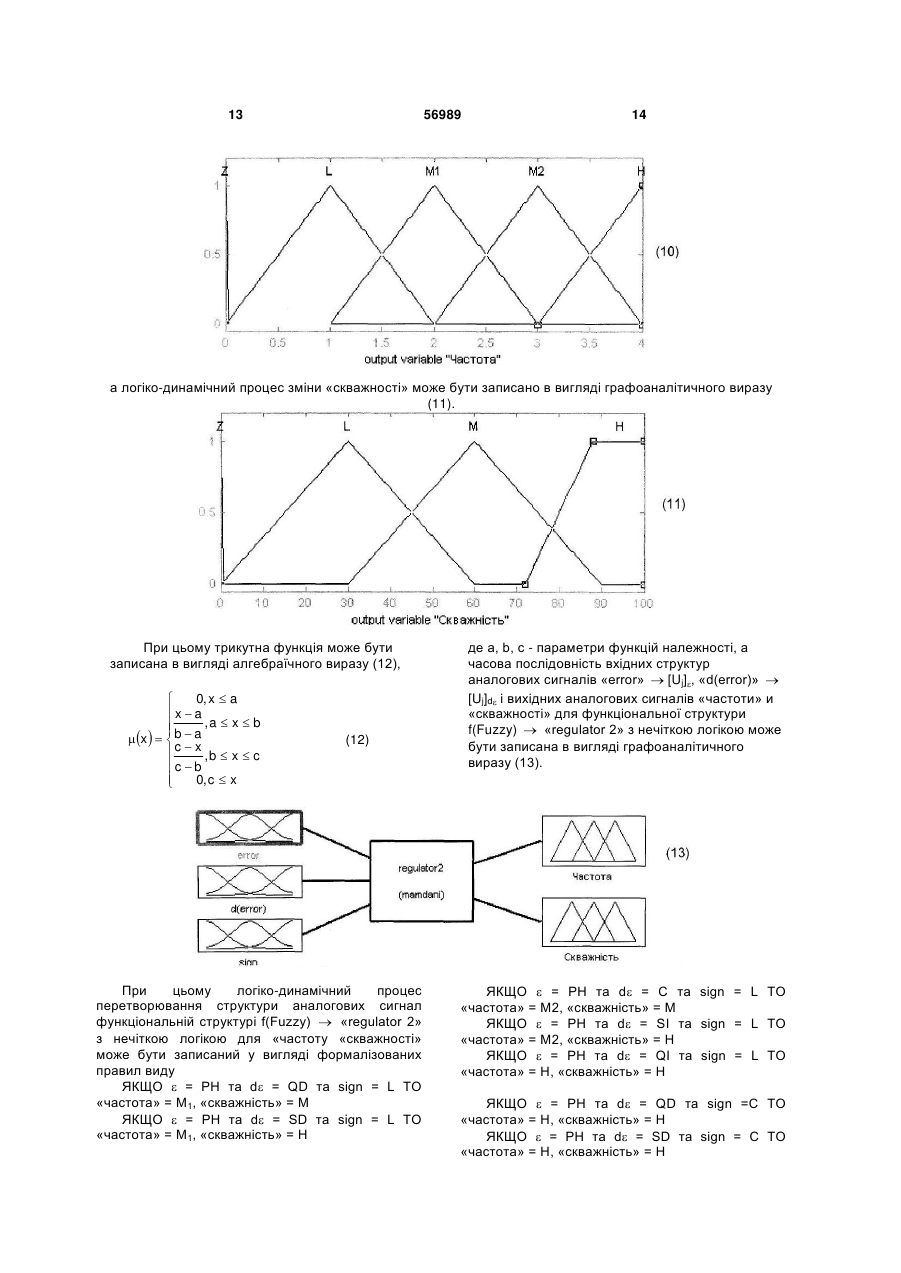
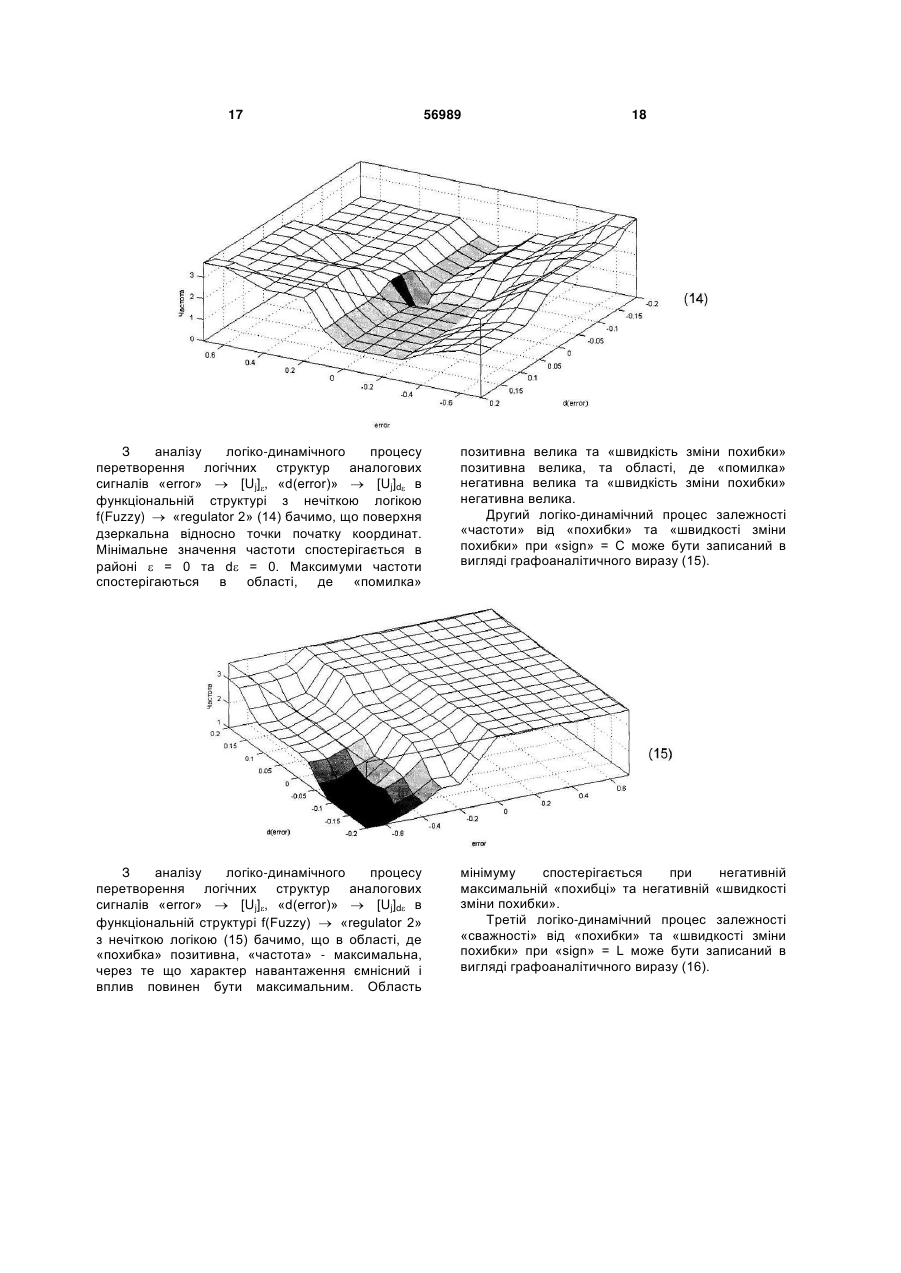
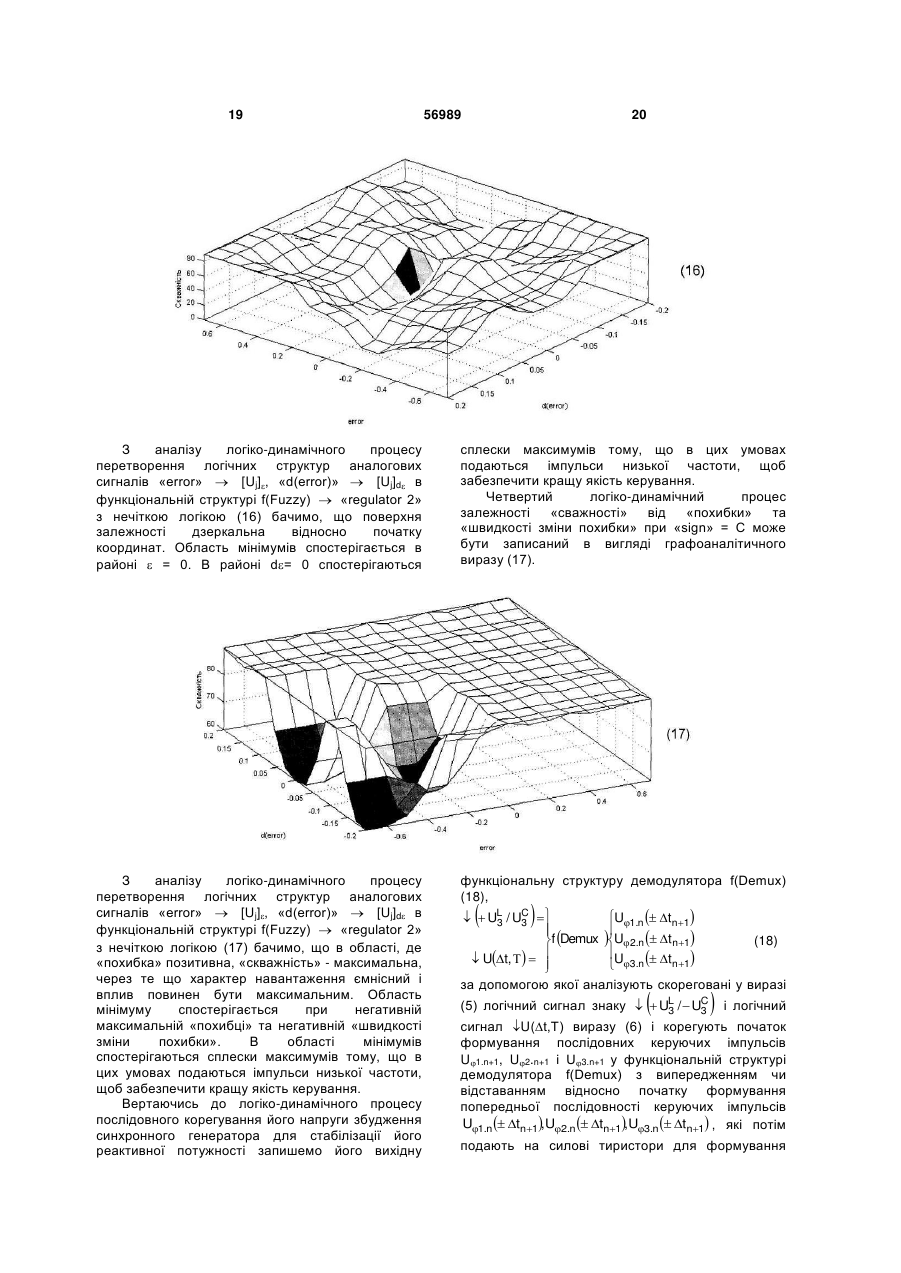
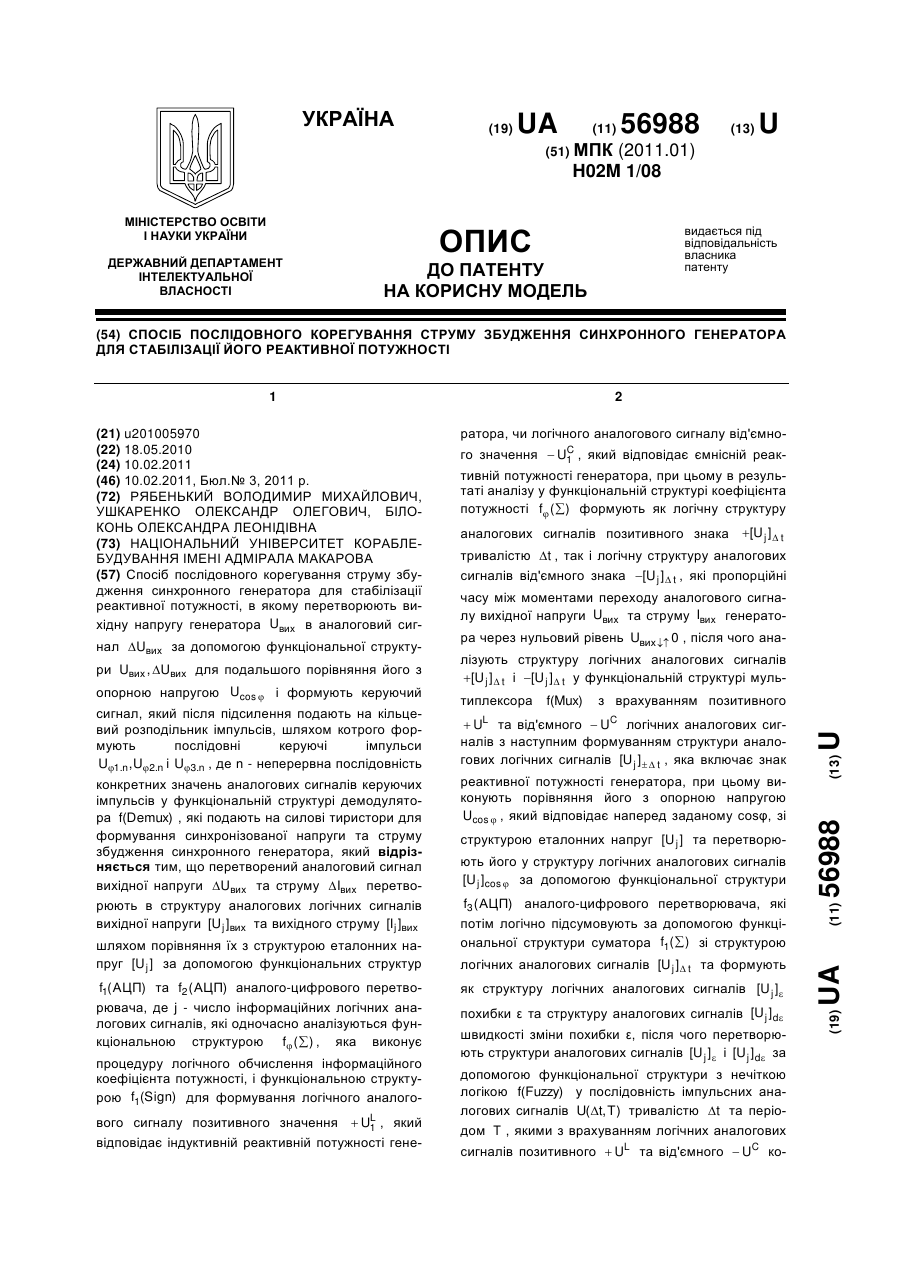
Спосіб стабілізації реактивної потужності синхронного генератора шляхом слідкуючого корегування його струму збудження, в якому перетворюють вихідну напругу генератора Uвих в аналоговий сигнал за допомогою Uвих функціональної структури Uвих, Uвих для подальшого порівняння його з опорною напругою Ucosφ і формують керуючий сигнал, який після підсилення подають на кільцевий розподільник імпульсів, котрим формують послідовні керуючі імпульси Uφ1.n, Uφ2.n і Uφ3.n, де n - неперервна послідовність конкретних значень аналогових сигналів керуючих імпульсів у функціональній структурі демодулятора f(Demux), які подають на силові тиристори для формування синхронізованої напруги та струму збудження синхронного генератора, який відрізняється тим, що перетворений аналоговий сигнал вихідної напруги Uвих та струму Івих перетворюють в структуру аналогових логічних сигналів вихідної напруги [Uj]вих та вихідного струму [Ij]вих шляхом порівняння їх з структурою еталонних напруг [Uj] за допомогою функціональних структур f1(АЦП) та f2(AЦП) аналого-цифрового перетворювача, де j число інформаційних логічних аналогових сигналів, які одночасно аналізуються функціональною структурою f , що виконує 2 3 56989 імпульсів Uφ1.n, Uφ2.n і Uφ3.n, при цьому логікодинамічний процес стабілізації реактивної 4 потужності синхронного генератора виконано у відповідності до математичної моделі виду вих вих f вих, вих j f1ЦП j вих Uj t f U, вих 0 f Uj вих Uj Uj f2 ЦП вих Uвих f Uвих, Uвих Uj f1Sign вих j &1 f2 Sign t f U, вих 0 Uc os f3 ЦП Uj де Uj Uj c os Uj і = f1 f d / dn 1 L C U1 / U1 &1 L C U2 / U2 Uj Uj L C U1 / U1 f Fuzzy Ut, f (Demux ) U1.n tn1 U2.n tn1 U3.n tn1 = Uj d - система аналогових ( ) і аналого-логічних функціональних зв'язків (=) функціональних структур; ( ) - символи функціонального зв'язку, що переривається, вихідних і вхідних структур аналогових сигналів, які записують після і перед структурою аналогових сигналів відповідно; &1 - логічний елемент f1(&)-HI; 1 і & 1 - логічний елемент f1(}) - АБО і f1-3(АЦП) - функціональні структури аналогоцифрового перетворювання; f -функціональна структура, яка виконує процедуру обчислення інформаційного коефіцієнта потужності; f1 функціональна структура суматора; f(d/dn) функціональна структура логічного диференціювання; f1,2(Sign) - функціональна структура, яка формує знак індуктивної чи ємнісної реактивної потужності; f(Fuzzy) - функціональна структура з нечіткою логікою; f(Demux) функціональна структура демультиплексора. f1(&)-I; Корисна модель належить до галузі електроенергетики, зокрема до способу для стабілізації напруги газодизель-генератора шляхом корегування його напруги збудження. Може бути використана для підвищення стабільності роботи синхронного генератора. Відомо про спосіб автоматичного регулювання частоти та розподілу активної потужності генератора (Хомяков Н.М. и др. Судовые электроэнергетические установки. Издательство «Судостроение». Ленинград, 1966 г. Стр. 175, рис. 82), в якому для стабілізації частоти вихідної напруги синхронного генератора з первинним 5 56989 двигуном здійснюють зміну частоти і серводвигуна, виконують регулювання швидкості обертання первинного двигуна. Відомому способу автоматичного регулювання вихідної напруги притаманна нестабільність роботи генератора при зміні зовнішнього навантаження, яка може бути зменшена на 10-15% від номінальної потужності генератора при введенні слідкуючого корегування. Відомо також про спосіб стабілізації частоти вихідної напруги синхронного генератора шляхом випереджуючого корегування його напруги збудження (Електромеханічні системи автоматичного керування та електроприводи. За редакцією професорів М.Г. Поповича та О.Ю. Лозинського, Київ „Либідь" 2005р., стор. 247, рис. 4.17), в якому для стабілізації роботи синхронного генератора фіксують момент вимірювання вихідної напруги генератора, перетворюють вихідну напругу генератора Uвих в аналоговий сигнал за допомогою перетворюючої Uвих функціональної структури Uвих, Uвих для подальшого порівняння його з опорною напругою 6 Uj, потім з нього формують пилкоподібну напругу U0 Umах тривалістю t та періодом Тi, де і число періодів, за допомогою функціональної структури f1[ t(U0 Umax,Тi)], після чого порівнюють пилкоподібну напругу U0 Umax тривалістю t з опорною напругою Uj за допомогою функціональної структури f1(U0 Umax >Uj) і формують керуючі сигнали з стрімким переднім фронтом, які після підсилення подають на кільцевий розподільник імпульсів функціональної структури демодулятора f(Demux), за допомогою якого формують послідовні керуючі імпульси U1.n, U2.n і U3.n, де «n» - неперервна послідовність конкретних значень аналогових сигналів керуючих імпульсів, які подають на силові тиристори для формування синхронізованої напруги та струму збудження синхронного генератора, при цьому логіко-динамічний процес стабілізації синхронного генератора виконано відповідно до математичної моделі виду U1.n t n 1 Uвих Uвих, Uвих f1t U0 Umax , i f U Umax U j Ut f (Demux ) U2.n t n 1 Uj 1 0 U 3.n t n 1 структурі демодулятора f(Demux), які подають на де Uвих, Uвих - перетворююча функціональна силові тиристори для формування синхронізованої структура, f1[ t(U0 Umax,Тi)], -функціональна напруги та струму збудження синхронного структура, яка формує пилкоподібну напругу U0 генератора, при цьому перетворений аналоговий тривалістю Umax t та періодом Ті, сигнал вихідної напруги Uвих та струму Iвих f1(U0 Umax>Uj) функціональна структура перетворюють в структуру аналогових логічних порівняння пилкоподібної напруги U0 Umax з сигналів вихідної напруги [Uj]вих та вихідного опорною Uj; f(Demux) - функціональна структура струму [lj]вих шляхом порівняння їх з структурою демодулятора. Відомому способу притаманна еталонних напруг [Uj] за допомогою нестабільність роботи генератора через зміну його функціональних структур f1(АЦП) та f2(AЦП) аналогореактивної потужності. Стабільність роботи цифрового перетворювача, де «j» - число синхронного генератора з врахуванням зміни інформаційних логічних аналогових сигналів, які струму збудження генератора може бути отримана одночасно аналізуються функціональною у межах 10-15% від номінальної потужності структурою f , що виконує процедуру логічного генератора. обчислення інформаційного коефіцієнта Ставиться задача удосконалення способу потужності, і функціональною структурою f1(Sign) стабілізації реактивної потужності синхронного для формування логічного аналогового сигналу генератора шляхом слідкуючого корегування його позитивного значення +UL1, який відповідає напруги збудження, в якому шляхом зміни індуктивній реактивній потужності генератора, чи моменту подачі напруг на обмотку збудження логічного аналогового сигналу від'ємного значення синхронного генератора забезпечується –UC1, який відповідає ємнісній реактивній стабілізація його реактивної потужності, за рахунок потужності генератора, при цьому в результаті чого підвищується ККД на 10-15%, зменшується аналізу у функціональній структурі коефіцієнта використання палива на 5-10%. Вирішується поставлена задача тим, що потужності f формують логічну структуру спосіб стабілізації реактивної потужності шляхом аналогових сигналів [Uj] tf(U,Iвих0) тривалістю корегування його напруги збудження, в якому t, який відповідає часу між моментами переходу перетворюють вихідну напругу генератора Uвих в аналогового сигналу вихідної напруги Uвих та аналоговий сигнал за допомогою Uвих струму Івих генератора через нульовий рівень функціональної структури Uвих, Uвих для f(U,Iвих0), при цьому виконують порівняння його з дальшого порівняння його з опорною напругою опорною напругою Ucos- який відповідає наперед Ucos і формують керуючий сигнал, який після заданому cos, зі структурою еталонних напруг [Uj] підсилення подають на кільцевий розподільник та перетворюють його у структуру логічних імпульсів, котрим формують послідовні керуючі аналогових сигналів [Uj]cos за допомогою імпульси U1.n, U2.n і U3.n, де «n» - неперервна функціональної структури f3(АЦП) аналогопослідовність конкретних значень аналогових цифрового перетворювача, які потім логічно сигналів керуючих імпульсів у функціональній сумують за допомогою функціональної структури 7 суматора f1 зі структурою логічних аналогових сигналів [Uj] t f(U,Iвих0) та формують як структуру логічних аналогових сигналів [Uj] похибки та структуру аналогових сигналів [Uj]d швидкості зміни похибки , так і аналізують структуру логічних аналогових сигналів [Uj] похибки за допомогою функціональної структури знака реактивної потужності f2(Sign) і формують другий логічний аналоговий сигнал позитивного значення +UL2, який відповідає індуктивній реактивній потужності генератора, чи другий логічний аналоговий сигнал від'ємного значення UC2, який відповідає ємнісній реактивній потужності генератора, при цьому перетворюють логічні структури аналогових сигналів похибки [Uj] та швидкості зміни похибки [Uj]d з урахуванням перших логічних аналогових сигналів +UL1 та –UC1 функціональних зв'язків (=) функціональних структур; () - символи функціонального зв'язку, що переривається, вихідних і вхідних структур аналогових сигналів, які записують після і перед структурою аналогових сигналів відповідно; &1 логічний елемент f1(&)-HI; f1-3(АЦП) цифрового функціональні структури аналогоf перетворювання; функціональна структура, яка виконує процедуру обчислення інформаційного коефіцієнта потужності; f1 - функціональна структура 56989 8 за допомогою функціональної структури з нечіткою логікою f(Fuzzy) у послідовність імпульсних аналогових сигналів U( t,T) тривалістю t та періодом Т. Одночасно з цим виконується порівняльний аналіз перших та других аналогових сигналів +UL1, -UC1 і +UL2, -UC2 за допомогою функціональної логічної структури з логічними елементами f1(&)-TA, f1(&)-HI і f1(})-AБO та корегують початок формування послідовних керуючих імпульсів U1.n+1, U2.n+1 і U3.n+1 в функціональній структурі демодулятора f(Demux) з випередженням чи відставанням відносно початку формування попередньої послідовності керуючих імпульсів U1.n, U2.n і U3.n при цьому логікодинамічний процес стабілізації реактивної потужності синхронного генератора виконано у відповідності до математичної моделі виду суматора; f(d/dn) - функціональна структура логічного диференціювання; f1;2(Sign) функціональна структура, яка формує знак індуктивної чи ємнісної реактивної потужності; f(Fuzzy) -функціональна структура з нечіткою логікою; f(Demux) - функціональна структура демультиплексора. Реалізується запропонований спосіб стабілізації реактивної потужності синхронного генератора за допомогою слідкуючого корегування його напруги збудження наступним чином. Спочатку відповідно до аналітичного виразу (1) 9 вихідна напруга Uвих та струм Івих синхронного генератора перетворюють за допомогою функціональної структури f(Uвих, Uвих) та f(Івих, Івих) в аналогові сигнали Uвих і Івих, максимальне значення яких не перевищує динамічного діапазону структури еталонних напруг [Uj] функціональних структур f1(АЦП) і f2(АЦП) аналого-цифрового перетворювача, де «j» число інформаційних логічних аналогових сигналів. Після чого перетворений аналоговий сигнал вихідної напруги Uвих та струму Івих перетворюють у структуру аналогових логічних сигналів вихідної напруги [Uj]вих та вихідного струму [lj] вих шляхом порівняння їх зі структурою еталонних напруг [Uj] за допомогою функціональних структур f1(АЦП) і f2(АЦП) аналогоцифрового перетворювача, які аналізують за допомогою функціональної структури f , яка виконує процедуру логічного обчислення інформаційного коефіцієнта потужності. При цьому у результаті аналізу у функціональній структурі коефіцієнта потужності f формують логічну структуру аналогових сигналів [Uj]t f(U,Iвих0) тривалістю t переходу аналогового сигналу вихідної напруги U вих та струму Івих генератора через нульовий рівень Uвих0. Одночасно з цією процедурою відповідно до функціональної структури (2) Uj вих f Sign UL / UC (2) j 1 вих за допомогою функціональної структури f1(Sign) аналізують структуру аналогових логічних сигналів вихідної напруги [Uj]вих та вихідного струму [Іj]вих та формують логічний аналоговий сигнал позитивного значення +UL, який відповідає індуктивній реактивній потужності генератора, чи логічний аналоговий сигнал від'ємного значення Uc, який відповідає ємнісній реактивній потужності генератора. Одночасно з перетворенням вихідної напруги Uвих та Івих струму синхронного генератора відповідно до аналітичного виразу (3) виконують порівняння опорної напруги Ucos, яка відповідає наперед заданому cos зі структурою еталонних напруг [Uj], та перетворюють її у 56989 10 структуру логічних аналогових сигналів Uj]cos за допомогою функціональної структури f3(АЦП). Після цього структуру логічних аналогових сигналів [Uj]cos логічно сумують за допомогою функціональної структури суматора f1 зі структурою аналогових логічних сигналів Uj f U,Iвих 0 виразу (1) та формують як t логічну структуру аналогових сигналів [Uj] похибки , так і логічну структуру аналогових сигналів [Uj]d швидкості зміни похибки . Потім при аналізі логічної структури аналогових сигналів [Uj] похибки у аналітичному виразі (4) U j f2 Sign UL / UC (4) 2 2 за допомогою функціональної структури знаку реактивної потужності f2(Sign) та формують другий логічний аналоговий сигнал позитивного значення +UL2, який відповідає індуктивній реактивній потужності генератора, чи другий логічний аналоговий сигнал від'ємного значення UC2, який відповідає ємнісній реактивній потужності генератора. Після чого у відповідності зі структурою логічних елементів f1(&)-ТА, f1(&)-HI і f1(})-AБO аналітичного виразу (5) виконують порівняльний аналіз перших та других аналогових сигналів +UL1, -UС1 та +UL2, UC2 і формують скореговані логічні аналогові сигнали +UL3/-UC3. Одночасно з аналізом логічної структури аналогових сигналів [Uj] похибки за допомогою аналітичного виразу (4) виконується аналіз за допомогою функціональної структури з нечіткою логікою (6) і формування послідовності імпульсних аналогових сигналів U(t,T) тривалістю t та періодом Т. При цьому слід відзначити, що для кожної змінної задані лінгвістичні терми, відповідні деяким діапазонам чітких значень. Щоб визначити граничні значення [Uj] похибки розглянемо ймовірні значення опорного cos та поточного Uвихf(cos). Опорний Ucos задається, тому оптимальне значення, яке можна задати, 11 Ucos = 0.3..1. Поточний Uвихf(cos) може приймати значення від 0,3 до 1. Виходячи з того, що =cos (оп) – cos(пот), похибка має такі границі [Uj] = [-0,7-0,7]. Для вхідної змінної «error» () використовується шість термів: NH - від'ємне велике, NL - від'ємне мале, Z - близьке до нуля, PL - позитивне мале, РМ - позитивне середнє, РН - позитивне велике. 56989 12 Для вхідної змінної «derror» (d) визначаємо такі границі [Uj]d = [-0,2-0,2], так як швидкість зміни похибки може зростати та спадати, тоді приймаємо збільшення швидкості за позитивне, а зменшення - за негативне. Визначаємо такі терми: QD - швидко спадає, SD - повільно спадає, С - постійне, SI - повільно зростає, QI швидко зростає. При цьому змінна «похибка» [Uj] може бути записана в вигляді графоаналітичного виразу (7), а «швидкість зміни похибки» [Uj]d може бути записана в вигляді графоаналітичного виразу (8). Третя змінна реагує на характер навантаження: індуктивне та ємнісне. Приймемо індуктивний характер за умовну 1, а ємнісний за умовну -1. Тоді функція належності змінної «sign» може бути записана в вигляді графоаналітичного виразу (9). В якості вихідних лінгвістичних змінних приймаємо частоту та скважність вихідного сигналу. Лінгвістична змінна «частота» має границі [0-4]Гц та п'ять термів: Z - нульове значення, L - низьке значення, М1 - перше середнє значення, М2 - друге середнє значення, Н - високе значення частоти. Лінгвістична змінна «скважність» має границі [0-100]% та чотири терми: Z - нульове значення, L - низьке значення, М - середнє значення, Н - високе значення скважності. При цьому функція належності змінної «частота» може бути записана в вигляді графоаналітичного виразу (10), 13 56989 14 а логіко-динамічний процес зміни «скважності» може бути записано в вигляді графоаналітичного виразу (11). При цьому трикутна функція може бути записана в вигляді алгебраїчного виразу (12), 0, x a x a ,a x b x b a cx ,b x c c b 0, c x (12) При цьому логіко-динамічний процес перетворювання структури аналогових сигнал функціональній структурі f(Fuzzy) «regulator 2» з нечіткою логікою для «частоту «скважності» може бути записаний у вигляді формалізованих правил виду ЯКЩО = РН та d = QD та sign = L ТО «частота» = М1, «скважність» = М ЯКЩО = РН та d = SD та sign = L ТО «частота» = М1, «скважність» = Н де a, b, с - параметри функцій належності, а часова послідовність вхідних структур аналогових сигналів «error» [Uj], «d(error)» [Uj]d і вихідних аналогових сигналів «частоти» и «скважності» для функціональної структури f(Fuzzy) «regulator 2» з нечіткою логікою може бути записана в вигляді графоаналітичного виразу (13). ЯКЩО = РН та d = С та sign = L ТО «частота» = М2, «скважність» = М ЯКЩО = РН та d = SI та sign = L ТО «частота» = М2, «скважність» = Н ЯКЩО = РН та d = QI та sign = L ТО «частота» = Н, «скважність» = Н ЯКЩО = РН та d = QD та sign =С ТО «частота» = Н, «скважність» = Н ЯКЩО = РН та d = SD та sign = С ТО «частота» = Н, «скважність» = Н 15 56989 ЯКЩО = РН та d = С та sign = С ТО «частота» = Н, «скважність» = Н ЯКЩО = РН та d = SI та sign = С ТО «частота» = Н, «скважність» = Н ЯКЩО = РН та d = QI та sign = С ТО «частота» = Н, «скважність» = Н ЯКЩО = PL та d = QD та sign = L ТО «частота» = М1, «скважність» = L ЯКЩО = PL та d = SD та sign = L ТО «частота» = М1, «скважність» = М ЯКЩО = PL та d= С та sign = L ТО «частота» = М1, «скважність» = Н ЯКЩО = PL та d = SI та sign =L ТО «частота» = М2, «скважність» = М ЯКЩО = PL та d = QI та sign =L ТО «частота» = М2, «скважність» = Н ЯКЩО = PL та d = QD та sign =С «частота» = Н, «скважність» = Н ЯКЩО = PL та d = SD та sign = С «частота» = Н, «скважність» = Н ЯКЩО = PL та d = С та sign = С «частота» = Н, «скважність» = Н ЯКЩО = PL та d = SI та sign = С «частота» = Н, «скважність» = Н ЯКЩО = PL та d = QI та sign = С «частота» = H, «скважність» = Н ТО ТО ТО ТО ТО ЯКЩО = Z та d = QD та sign = L ТО «частота» = L, «скважність» = M ЯКЩО = Z та d = SD та sign =L ТО «частота» =L, «скважність» = L ЯКЩО = Z та d = С та sign = L ТО «частота» = Z, «скважність» = Z ЯКЩО = Z та d = SI та sign = L ТО «частота» = L, «скважність» = L ЯКЩО = Z та d = QI та sign = L ТО «частота» = L, «скважність» = M ЯКЩО = Z та d = QD та sign = С ТО «частота» = H, «скважність» = H ЯКЩО = Z та d = SD та sign =C ТО «частота» = Н, «скважність» = H ЯКЩО = Z та d = С та sign = С ТО «частота» = H, «скважність» = Н ЯКЩО = Z та d = SI та sign =С ТО «частота» = Н, «скважність» = Н ЯКЩО = Z та d = QI та sign =С ТО «частота» =Н, «скважність» = Н ЯКЩО = NL та d = QD та sign =L ТО «частота» = М1, «скважність» = Н 16 ЯКЩО = NL та d = SD та «частота» = М1, «скважність» = М ЯКЩО = NL та d = С та «частота» = L, «скважність» = Н ЯКЩО = NL та d = SI та «частота» = L, «скважність» = М ЯКЩО = NL та d = QI та «частота» = L, «скважність» = L sign = L ТО sign = L ТО sign = L ТО sign = L ТО ЯКЩО = NL та d = QD та sign =С «частота» = М1, «скважність» = Н ЯКЩО = NL та d = SD та sign = С «частота» = М2, «скважність» = М ЯКЩО = NL та d = С та sign = С «частота» = М2, «скважність» = Н ЯКЩО = NL та d = SI та sign = С «частота» = Н, «скважність» = Н ЯКЩО = NL та d = QI та sign = С «частота» = Н, «скважність» = Н ЯКЩО = NH та d = QD та «частота» = H, «скважність» = H ЯКЩО = NH та d = SD та «частота» = M2, «скважність» = H ЯКЩО = NH та d = С та «частота» = М2, «скважність» = М ЯКЩО = NH та d = SI та «частота» = М1, «скважність» = Н ЯКЩО = NH та d = QI та «частота» = М1, «скважність» = М ТО ТО ТО ТО ТО sign = L ТО sign = L ТО sign = L ТО sign = L ТО sign = L ТО ЯКЩО = NH та d = QD та sign = С ТО «частота» = L, «скважність» = М ЯКЩО = NH та d = SD та sign =С ТО «частота» = L, «скважність» = Н ЯКЩО = NH та d = С та sign = С ТО «частота» = М1, «скважність» = М ЯКЩО = NH та d = SI та sign = С ТО «частота» = М1, «скважність» = Н ЯКЩО = NH та d = QI та sign = С ТО «частота» = М2, «скважість» = Н В результаті реалізації запропонованих правил за допомогою Matlab-модель АЕЕС були отримані чотири залежності логіко-динамічного процесу «частоти» та «скважності» від «похибки» [Uj], «швидкості зміни похибки» [Uj]d та «sign». Перший логіко-динамічний процес залежності «частоти» від «похибки»,«швидкості зміни похибки» та при «sign» = L може бути записаний в вигляді графоаналітичного виразу (14). 17 56989 18 З аналізу логіко-динамічного процесу перетворення логічних структур аналогових сигналів «error» [Uj], «d(error)» [Uj]d в функціональній структурі з нечіткою логікою f(Fuzzy) «regulator 2» (14) бачимо, що поверхня дзеркальна відносно точки початку координат. Мінімальне значення частоти спостерігається в районі = 0 та d = 0. Максимуми частоти спостерігаються в області, де «помилка» позитивна велика та «швидкість зміни похибки» позитивна велика, та області, де «помилка» негативна велика та «швидкість зміни похибки» негативна велика. Другий логіко-динамічний процес залежності «частоти» від «похибки» та «швидкості зміни похибки» при «sign» = С може бути записаний в вигляді графоаналітичного виразу (15). З аналізу логіко-динамічного процесу перетворення логічних структур аналогових сигналів «error» [Uj], «d(error)» [Uj]d в функціональній структурі f(Fuzzy) «regulator 2» з нечіткою логікою (15) бачимо, що в області, де «похибка» позитивна, «частота» - максимальна, через те що характер навантаження ємнісний і вплив повинен бути максимальним. Область мінімуму спостерігається при негативній максимальній «похибці» та негативній «швидкості зміни похибки». Третій логіко-динамічний процес залежності «сважності» від «похибки» та «швидкості зміни похибки» при «sign» = L може бути записаний в вигляді графоаналітичного виразу (16). 19 56989 20 З аналізу логіко-динамічного процесу перетворення логічних структур аналогових сигналів «error» [Uj], «d(error)» [Uj]d в функціональній структурі f(Fuzzy) «regulator 2» з нечіткою логікою (16) бачимо, що поверхня залежності дзеркальна відносно початку координат. Область мінімумів спостерігається в районі = 0. В районі d= 0 спостерігаються сплески максимумів тому, що в цих умовах подаються імпульси низької частоти, щоб забезпечити кращу якість керування. Четвертий логіко-динамічний процес залежності «сважності» від «похибки» та «швидкості зміни похибки» при «sign» = С може бути записаний в вигляді графоаналітичного виразу (17). З аналізу логіко-динамічного процесу перетворення логічних структур аналогових сигналів «error» [Uj], «d(error)» [Uj]d в функціональній структурі f(Fuzzy) «regulator 2» з нечіткою логікою (17) бачимо, що в області, де «похибка» позитивна, «скважність» - максимальна, через те що характер навантаження ємнісний і вплив повинен бути максимальним. Область мінімуму спостерігається при негативній максимальній «похибці» та негативній «швидкості зміни похибки». В області мінімумів спостерігаються сплески максимумів тому, що в цих умовах подаються імпульси низької частоти, щоб забезпечити кращу якість керування. Вертаючись до логіко-динамічного процесу послідовного корегування його напруги збудження синхронного генератора для стабілізації його реактивної потужності запишемо його вихідну функціональну структуру демодулятора f(Demux) (18), U1.n tn1 UL / UC 3 3 f Demux U2.n tn1 (18) U Ut, 3.n tn1 за допомогою якої аналізують скореговані у виразі (5) логічний сигнал знаку UL / UC 3 3 і логічний сигнал U(t,T) виразу (6) і корегують початок формування послідовних керуючих імпульсів U1.n+1, U2.n+1 і U3.n+1 у функціональній структурі демодулятора f(Demux) з випередженням чи відставанням відносно початку формування попередньої послідовності керуючих імпульсів U1.n tn1, U2.n tn1, U3.n tn1 , які потім подають на силові тиристори для формування 21 56989 22 синхронізованої напруги та струму збудження синхронного генератора. Для формування математичної моделі функціонально закінченого логіко-динамічного процесу послідовності корегування його напруги збудження синхронного генератора для стабілізації його реактивної потужності виконаємо об'єднання функціональних структур (1) - (6) та (18), запишемо результуючий аналітичний вираз Використання запропонованого технологічного рішення стабілізації реактивної потужності синхронного генератора за допомогою слідкуючого корегування його напруги збудження дозволить збільшити стабільність та економічність пристрою на 10-15%. Комп’ютерна верстка В. Мацело Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for stabilization of synchronous generator reactive power by set of excitation voltage thereof
Автори англійськоюRiabenkyi Volodymyr Mykhailovych, Ushkarenko Oleksandr Olehovych, Bilokon Oleksandra Leonidivna
Назва патенту російськоюСпособ стабилизации реактивной мощности синхронного генератора путем следящего корректирования его напряжения возбуждения
Автори російськоюРябенький Владимир Михайлович, Ушкаренко Александр Олегович, Билоконь Александра Леонидовна
МПК / Мітки
МПК: H02M 1/08
Мітки: корегування, збудження, спосіб, шляхом, стабілізації, синхронного, слідкуючого, потужності, реактивної, генератора, напруги
Код посилання
<a href="https://ua.patents.su/11-56989-sposib-stabilizaci-reaktivno-potuzhnosti-sinkhronnogo-generatora-shlyakhom-slidkuyuchogo-koreguvannya-jjogo-naprugi-zbudzhennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації реактивної потужності синхронного генератора шляхом слідкуючого корегування його напруги збудження</a>
Спосіб послідовного корегування струму збудження синхронного генератора для стабілізації його реактивної потужності
Номер патенту: 56988
Опубліковано: 10.02.2011
Автори: Ушкаренко Олександр Олегович, Рябенький Володимир Михайлович, Білоконь Олександра Леонідівна
МПК: H02M 1/08
Мітки: послідовного, синхронного, збудження, спосіб, корегування, стабілізації, реактивної, потужності, генератора, струму
Формула / Реферат:
Спосіб послідовного корегування струму збудження синхронного генератора для стабілізації реактивної потужності, в якому перетворюють вихідну напругу генератора в аналоговий сигнал за допомогою функціональної структури для подальшого...
Спосіб коригування струму збудження синхронного генератора при зміні частоти вихідної напруги
Номер патенту: 53710
Опубліковано: 11.10.2010
Автори: Білоконь Олександра Леонідівна, Дроган Ольга Ігорівна, Ушкаренко Олександр Олегович, Рябенький Володимир Михайлович
МПК: H02M 1/08
Мітки: спосіб, генератора, вихідної, синхронного, струму, збудження, зміни, напруги, коригування, частоти
Формула / Реферат:
Спосіб коригування струму збудження синхронного генератора при зміні частоти вихідної напруги, в якому перетворюють вихідну напругу генератора ±Uвих на аналоговый сигнал ±ΔUвиx за допомогою функціональної структури f(Uвиx, ΔUвиx) і формують керуючий сигнал, який після підсилення подають на кільцевий разподільник імпульсів, за допомогою якого формують послідовні керуючі імпульси Uφ1.n, Uφ2.n, та Uφ3.n, де "n"...
Спосіб стабілізації змінної напруги тиристорним регулятором з одночасним генеруванням реактивної потужності
Номер патенту: 56340
Опубліковано: 10.01.2011
Автори: Білько Олена Володимирівна, Шестеренко Володимир Євгеньович
МПК: H02J 3/12
Мітки: одночасним, регулятором, генеруванням, змінної, напруги, тиристорним, стабілізації, реактивної, потужності, спосіб
Формула / Реферат:
Спосіб стабілізації змінної напруги тиристорним регулятором з одночасним генеруванням реактивної потужності, що передбачає фазове регулювання змінної напруги, який відрізняється тим, що на вхід імпульсного напівпровідникового регулятора напруги подають напругу, на ступінь вищу від номінальної напруги електроприймачів, і регулювання напруги ведуть, зміщуючи задній фронт півсинусоїди напруги мережі.
Спосіб керування збудженням синхронного генератора при зміні частоти вихідної напруги
Номер патенту: 53711
Опубліковано: 11.10.2010
Автори: Нікішина Маргарита Володимирівна, Ушкаренко Олександр Олегович, Рябенький Володимир Михайлович, Білоконь Олександра Леонідівна
МПК: H02M 1/08
Мітки: вихідної, керування, зміни, частоти, спосіб, синхронного, збудженням, генератора, напруги
Формула / Реферат:
Спосіб керування збудженням синхронного генератора при зміні частоти вихідної напруги, в якому перетворюють вихідну напругу генератора в аналоговий сигнал за допомогою функціональної структури для подальшого перетворення і наступного...
Спосіб параметричної стабілізації напруги синхронного генератора
Номер патенту: 64442
Опубліковано: 16.02.2004
Автори: Шоцький Олександр Миколайович, Олєйников Олександр Михайлович
МПК: H03L 5/00
Мітки: генератора, спосіб, синхронного, напруги, стабілізації, параметричної
Формула / Реферат:
Спосіб параметричної стабілізації напруги синхронного генератора, що включає випрямлення трифазної напруги синхронного генератора, вимір тимчасових інтервалів кожного такту пульсацій миттєвої випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою і подачу імпульсів напруги на обмотку збудження шириною, обумовленою перетинанням кожного піка пульсацій з лінією опорної напруги, який відрізняється тим, що...
Попередній патент: Спосіб послідовного корегування струму збудження синхронного генератора для стабілізації його реактивної потужності
Наступний патент: Матеріал декоративного облицювального покриття
Випадковий патент: Пристрій для фізіотерапії