Спосіб керування дією або послідовністю дій сільськогосподарської машини


Формула / Реферат
1. Спосіб керування дією або послідовністю дій сільськогосподарської машини (1), оснащеної електронним блоком (10) і з'єднаної з трактором (2), при цьому вказаний трактор (2) містить щонайменше один засіб (5) керування, який відрізняється тим, що дія або послідовність дій, яка здійснюється вказаною машиною (1) запускається автоматично через контроль електронного блока (10) шляхом виявлення зміни стану одного із засобів (5) керування вказаним трактором (2) за допомогою системи (11) контролю, яка направляє інформацію до вказаного електронного блока (10).
2. Спосіб за п. 1, який відрізняється тим, що вказаним засобом (5) керування є привід, зв'язаний з сільськогосподарською машиною (1).
3. Спосіб за будь-яким з пп. 1 або 2, який відрізняється тим, що засіб (5) керування, зв'язаний з сільськогосподарською машиною (1), є валом (16) відбору потужності, сполученим з трансмісією (26) вказаної машини (1), а система (11) контролю містить датчик (32) вимірювання швидкості обертання.
4. Спосіб за будь-яким з пп. 1 або 2, який відрізняється тим, що засіб (5) керування, зв'язаний з сільськогосподарською машиною (1), є гідравлічним розподільником (17), а система (11) контролю містить щонайменше один датчик тиску або витрати.
5. Спосіб за п. 1, який відрізняється тим, що систему 11 контролю встановлюють на вказаній машині (1) та/або на вказаному тракторі (2).
6. Спосіб за п. 5, який відрізняється тим, що коли система (11) контролю встановлена на тракторі (2), електронний блок (10) має доступ до інформації через мережу зв'язку або через прямий вихід даних в кабіні (4) керування за допомогою роз'єму.
7. Спосіб за п. 1, який відрізняється тим, що електронний блок (10) містить мікропроцесор, який взаємодіє з програмою та керує різними механізмами (9) сільськогосподарської машини (1) за допомогою принаймні однієї послідовності дій.
8. Спосіб за п. 1, який відрізняється тим, що електронний блок (10) містить декілька підблоків, кожен з яких включає мікропроцесор та програму і які з'єднані між собою за допомогою засобу зв'язку, причому вказаний електронний блок (10) керує різними механізмами (9) сільськогосподарської машини (1) за допомогою щонайменше однієї послідовності дій.
Текст
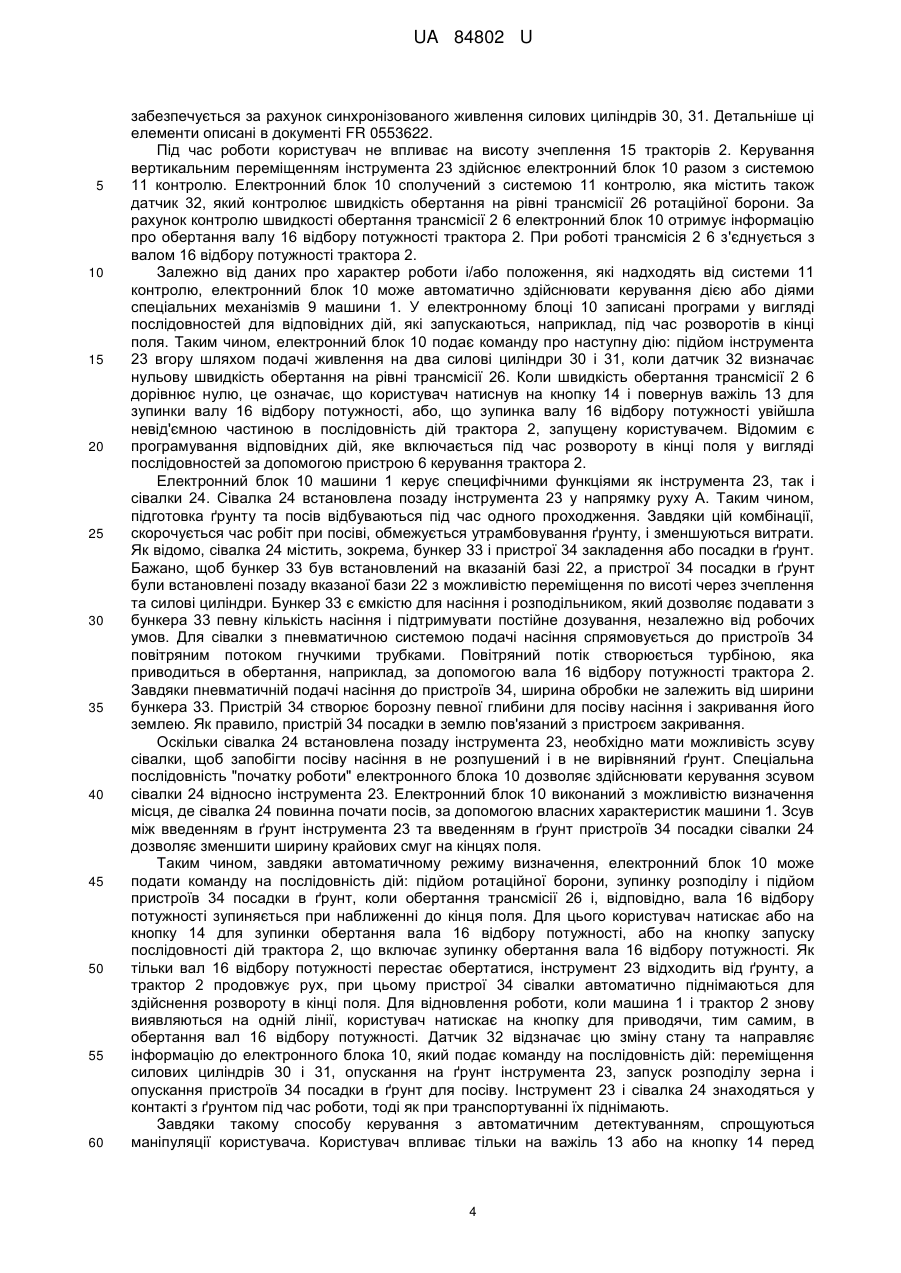
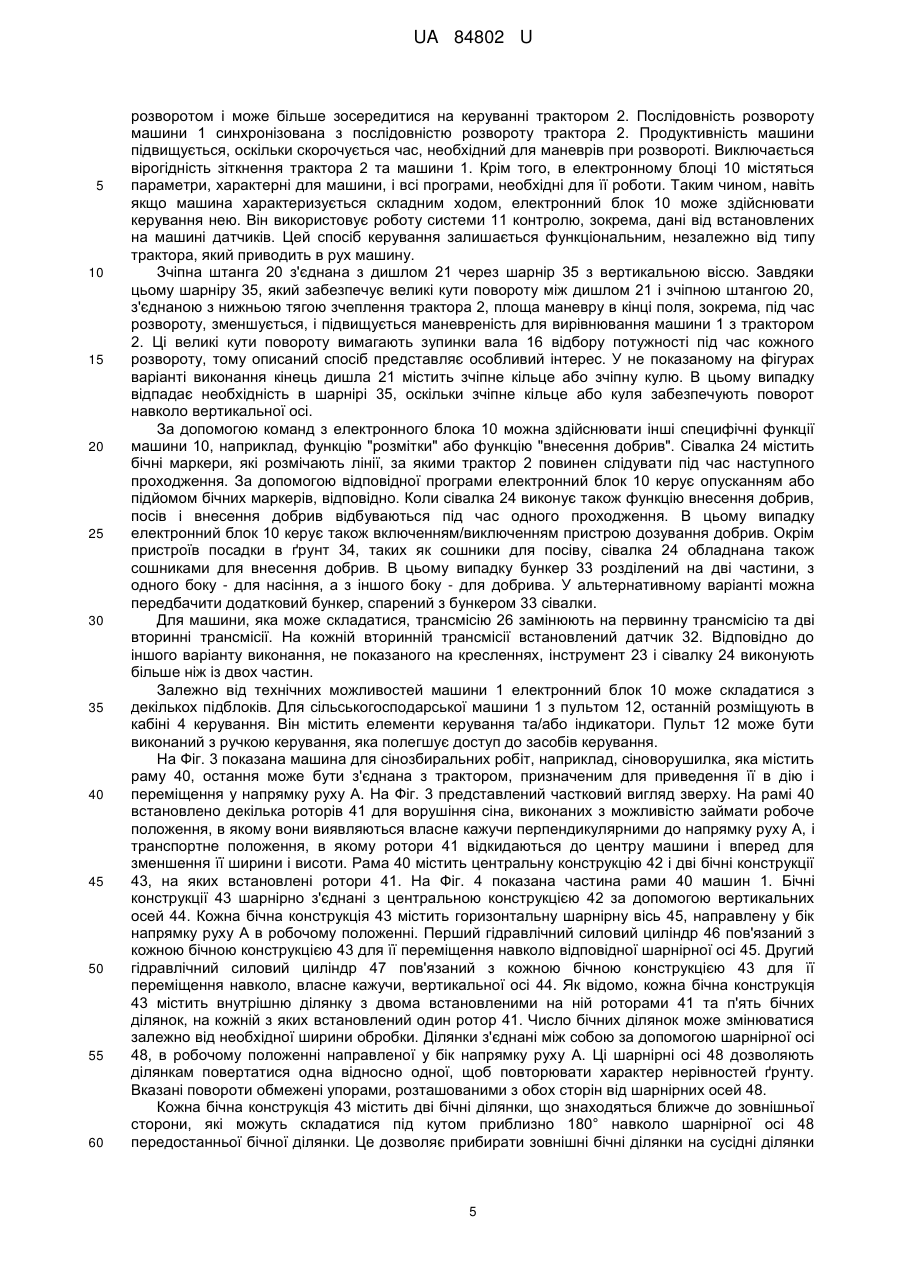
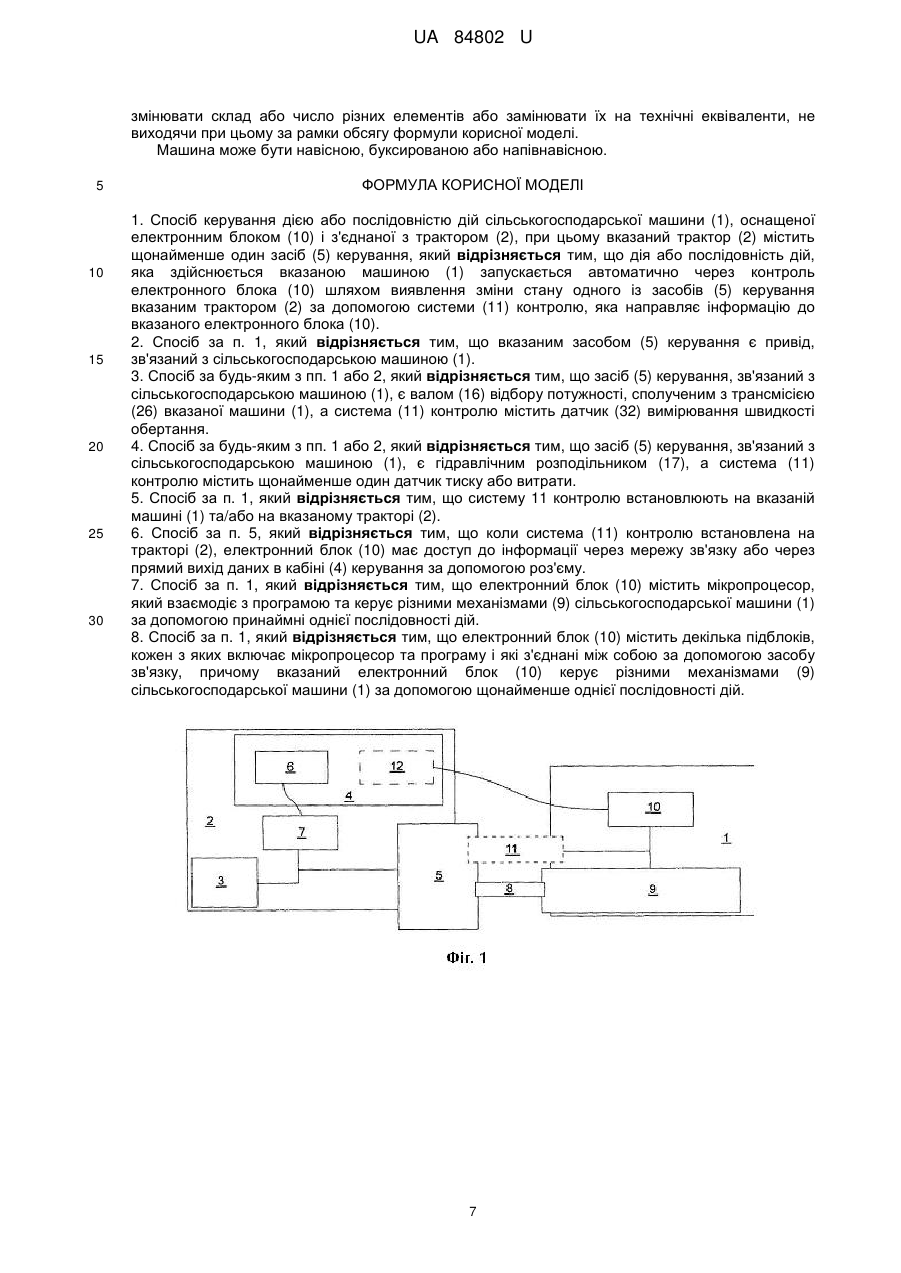
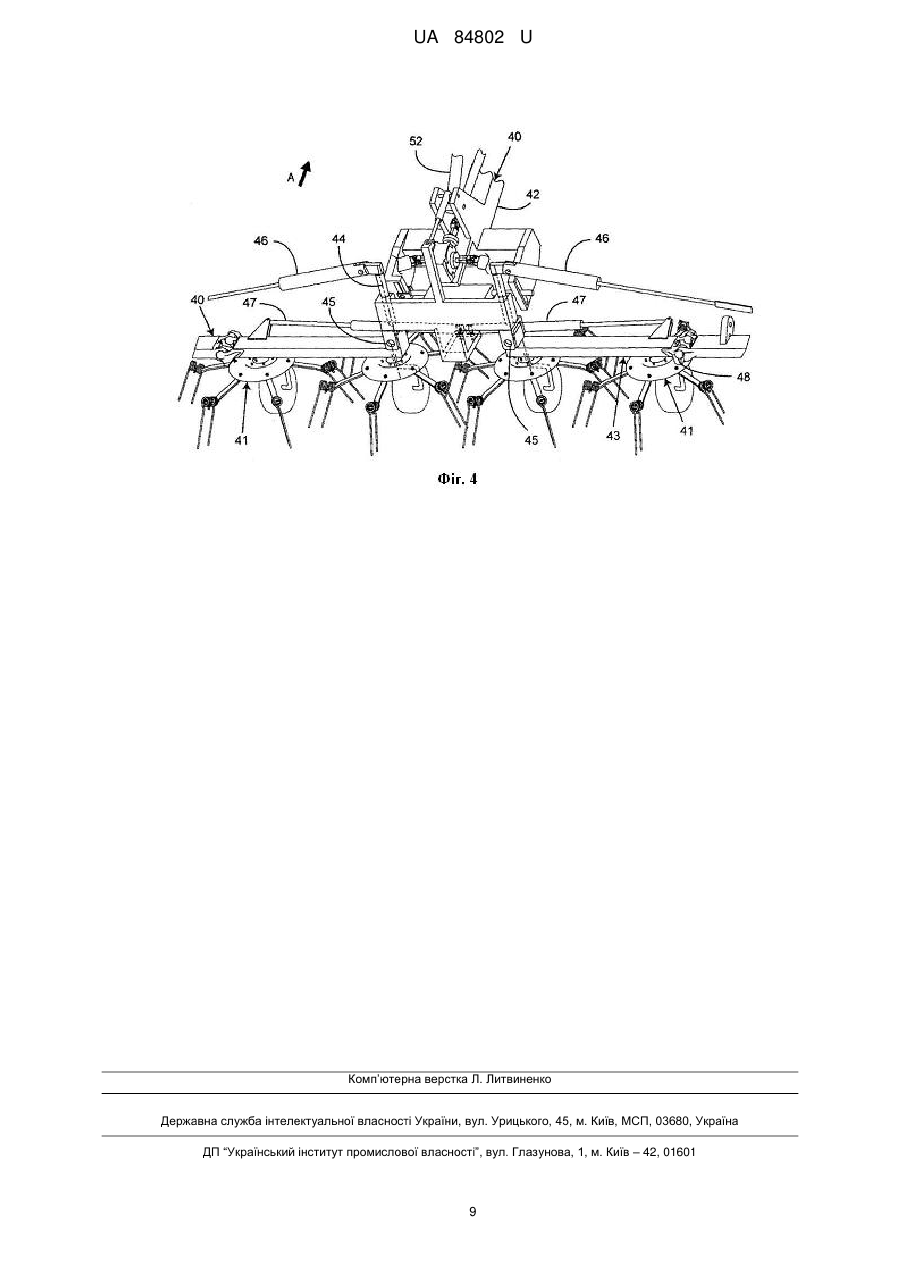
Реферат: Спосіб керування дією або послідовністю дій сільськогосподарської машини, що включає дію або послідовність дій, яка здійснюється вказаною машиною, оснащеною електронним блоком і з'єднаною з трактором. Трактор містить щонайменше один засіб керування. Дія або послідовність дій, яка здійснюється вказаною машиною, запускається автоматично через контроль електронного блока шляхом виявлення зміни стану одного із засобів керування вказаним трактором за допомогою системи контролю, яка направляє інформацію до вказаного електронного блока. UA 84802 U (12) UA 84802 U UA 84802 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до способів керування дією або послідовністю дій сільськогосподарської машини, оснащеної електронним блоком і зчепленої з трактором, який містить щонайменше один засіб керування. Корисна модель може бути використана в галузі сільськогосподарського машинобудування. У цій галузі проводяться численні інноваційні розробки, в основному пов'язані з впровадженням електроніки. Ці розробки покликані удосконалити існуючі експлуатаційні характеристики як трактора, так і сільськогосподарської машини. Для виконання різних польових робіт і/або збирання кормових культур зазвичай використовують сільськогосподарські машини, які приводяться в рух тракторами. Трактор містить, зокрема, двигун, кабіну, засоби керування, які приводяться в дію відповідним пристроєм керування, і обчислювальний пристрій. Пристрій керування містить важелі і/або кнопки для керування різними засобами керування, такими як задній і передній підйомники, задній і передній вали відбору потужності, гідравлічні розподільники. Обчислювальний пристрій містить запам'ятовуючий пристрій, і щонайменше одну програму. Зокрема, обчислювальний пристрій з'єднаний з обчислювальним блоком керування підйомником і з обчислювальним блоком керування двигуном і трансмісією. Керування трактором вимагає від користувача здійснення дій, які неодноразово повторюються, зокрема, при виконанні робіт у полі (оранка, підготовка ґрунту, посів), де на кожному кінці поля необхідно робити розворот. Користувач повинен протягом дуже короткого часу і в певному порядку вмикати та/або вимикати декілька засобів керування за допомогою пристрою керування. Щоб понизити трудомісткість та запобігти помилкам в маніпулюванні важелями і кнопками, черговість дій під час розвороту можна записати в програму обчислювального пристрою у вигляді послідовності. Послідовністю називається сукупність дій, які здійснюються в логічному і хронологічному порядку і протягом заданого часу. Програма містить серію послідовностей. Таким чином, записана послідовність розвороту може бути просто відтворена автоматично на кожному кінці поля за допомогою всього одного втручання на рівні пристрою керування трактором. Сільськогосподарські машини містять набір спеціальних механізмів призначених для виконання певної роботи. Цей набір механізмів ускладнює використання машини. Як відомо, сільськогосподарською машиною керують за допомогою електронного блока. Електронний блок містить мікропроцесор з відповідними однією або декількома програмами, який керує різними спеціальними механізмами через послідовності. Програма адаптована для машини і, зокрема, для виконання машиною різних функцій. Мікропроцесор приймає і обробляє дані від системи контролю і команди, які надходять з пульта керування. Так само, як і для трактора, програма машини може містити ряд призначених для виконання дій. Таким чином, під час розвороту одна єдина команда користувача з пульта керування сільськогосподарської машини автоматично запускає відповідну послідовність. Різні дії на рівні машини виконуються відповідно до заздалегідь визначеної послідовності, та, у разі потреби, з урахуванням сигналів, які видаються системою контролю. Електроніка керування трактором не залежить від електроніки керування зчепленою з трактором машиною. Так, при наближенні до кінця поля користувач запускає послідовність розвороту трактора через пристрій керування, потім запускає послідовність розвороту машини з пульта керування. Під час цього маневру користувач повинен контролювати напрямок та швидкість трактора і, у разі потреби, повинен змінювати дану швидкість. Він повинен також контролювати керування залежно від характеристик того трактора, який використовується, максимального кута повороту, блокування диференціала і адаптувати маневр залежно від того, чи працює він з вузькою або широкою машиною, короткою або довгою. Таким чином, маневрування при розвороті вимагає наявності досвіду і концентрації уваги. У документі FR 2764401 описано спосіб автоматизації виконання водієм трактора робіт, що повторюються, коли до трактора причеплена сільськогосподарська машина. Цей спосіб передбачає етап введення в пам'ять дій, які запускаються водієм через класичні засоби керування трактором, і етап відтворення цих дій після отримання команди від водія. Записані в пам'ять дії є діями, які здійснюються водієм під час ручного виконання послідовності операцій, що повторюються, наприклад, під час операцій розвороту. У обчислювальний пристрій трактора повинні бути заздалегідь введені параметри машини з метою їх урахування. Проте, таке рішення має свої обмеження, якщо потрібно здійснювати керування складнішою машиною, яка має свої власні засоби керування і приводи. В цьому випадку обчислювальний пристрій трактора не може знати і контролювати дії, властиві машині, унаслідок відсутності достатньо розробленої мережі зв'язку. 1 UA 84802 U 5 10 15 20 25 30 35 40 45 50 55 60 У разі, коли машина обладнана електронним блоком зі своєю робочою програмою, користувач повинен вводити до електронного блока параметри, пов'язані з трактором. У разі зміни трактора ці параметри необхідно переналаштовувати. У документі DE 19943561 описаний трактор з обчислювальним пристроєм, який містить програми регулювання і/або роботи для різних машин. Вибір відповідної програми обчислювальним пристроєм для здійснення керування машиною припускає наявність достатньо розробленої мережі зв'язку, щоб трактор міг сприймати і контролювати дії машини. На сьогоднішній день немає такої стандартної мережі, яка б забезпечувала зв'язок між машинами та різними тракторами, які присутні на ринку. У документі DE 10335112 описана сільськогосподарська машина, яка містить електронний блок і декілька датчиків, які створюють власну систему контролю машини. Ці датчики направляють дані до електронного блока за допомогою безпровідного зв'язку для установки робочих параметрів машини, тому ці датчики не можуть виявити зміну стану засобу керування, такого як вал відбору потужності трактора. Задачею корисної моделі є усунення вищезазначених недоліків. Для вирішення поставленої задачі запропонований спосіб керування, який дозволяє спростити маніпуляції користувача сільськогосподарської машини. Важливою особливою рисою відмінності корисної моделі є те, що здійснювана дія або послідовність дій сільськогосподарської машини запускається автоматично через контроль вказаного електронного блока шляхом виявлення зміни стану одного із засобів керування трактора за допомогою системи контролю, яка направляє інформацію до цього електронного блока. Таким чином, керування однією або декількома діями не залежить від досвіду або від технічних знань користувача. Спосіб керування відповідно до даної корисної моделі дозволяє звільнити користувача машини від керування механізмами машини. Координація керування між трактором і машиною є оптимізованою. Крім того, такий спосіб керування можна застосовувати на будь-якому тракторі, з яким з'єднана машина. Інші особливості і переваги корисної моделі визначені у формулі корисної моделі і будуть більш зрозумілими з наведеного нижче опису необмежуючих прикладів з посиланнями на приведені креслення. На Фіг. 1 схематично показана зчеплена з трактором сільськогосподарська машина відповідно до даної корисної моделі; на Фіг. 2 показаний перший приклад виконання машини, зчепленої з трактором, вигляд збоку; на Фіг. 3 показаний другий приклад виконання машини відповідно до даної корисної моделі, вигляд зверху; на Фіг. 4 детально показана частина машини, зображеної на Фіг. 3, вигляд ззаду. Схематично показана на Фіг. 1 сільськогосподарська машина 1 зчеплена з трактором 2. Сільськогосподарська машина 1 призначена для виконання таких робочих функцій, як підготовка ґрунту, посів, сінозбиральні роботи, тощо). Як відомо, трактор містить трансмісію, яка приводиться в дію двигуном 3, кабіну 4 керування, щонайменше один засіб 5 керування, який керується пристроєм 6 керування і обчислювальним пристроєм 7. Обчислювальний пристрій 7 містить декілька обчислювальних підблоків і виконує обчислювальні функції, будучи електронним блоком контролю трактора 2. Обчислювальний пристрій 7 дозволяє контролювати робочі параметри трактора 2 і виявляти можливі проблеми, для чого до нього приєднано набір датчиків та зондів, які видають інформацію про стан двигуна 3 і засобів 5 керування. Сільськогосподарська машина 1 містить зчіпний пристрій 8, набір спеціальних механізмів 9, призначених для виконання певних робіт, і електронний блок 10. Електронний блок 10 містить мікропроцесор і декілька програм і керує різними спеціальними механізмами за допомогою послідовностей дій. Залежно від варіанту виконання, машина може містити пульт 12 керування. Машина 1 зчеплена з трактором 2 за допомогою зчіпного пристрою 8. Трактор 2 приводить в рух машину 1, переміщаючи її в напрямку А і у разі потреби приводить в дію її спеціальні механізми 9. Приведення в дію щонайменше одного із засобів 5 керування трактора 2 і/або одного або декількох спеціальних механізмів 9 машин 1 відстежується системою 11 контролю. Ця система 11 контролю дозволяє отримувати дані про робочі характеристики трактора 2 та/або машини 1. Система 11 контролю містить датчики та/або зонди. Відповідні датчики або зонди вибирають залежно від типу контрольованого засобу 5 керування або спеціального механізму машини. Дані, які знімаються цими датчиками або зондами, спрямовують до електронного блока 10, який виконаний з можливістю їх обробки. Існують датчики для вимірювання тиску, витрат або швидкості обертів. Можна також використовувати будь-який інший вид датчиків, які видають 2 UA 84802 U 5 10 15 20 25 30 35 40 45 50 55 60 дані, що дозволяють визначати робочі характеристики засобу 5 керування або спеціального механізму. Відповідно до важливої особливості корисної моделі, дія або послідовність дій для здійснення на рівні вказаної машини 1 запускається автоматично через контроль електронного блока 10 при виявленні зміни стану одного із засобів 5 керування вказаного трактора 2 за допомогою системи 11 контролю, яка направляє інформацію до вказаного електронного блока 10. Таким чином, зміна стану одного із засобів 5 керування, пов'язаного з машиною 1, виявляється за допомогою вказаної системи 11 контролю. Система 11 контролю направляє інформацію до електронного блока 10. При виявленні зміни стану одного із засобів 5 керування через електронний блок 11 подається команда на дію або послідовність дій для вказаної машини 1. Послідовністю називається дія або сукупність дій, призначених для виконання їх в логічному і хронологічному порядку і в заданий час. Трактор 2 приводить в рух машину 1, яка містить деталі, що обертаються, та/або силові циліндри, через щонайменше один засіб 5 керування. Команда на дію подається виключно через електронний блок 10 машин 1 в автоматичному режимі. Завдяки такому виявленню зміни стану, узгодженість дій між трактором 2 і машиною 1 оптимізується. Таким чином, керування щонайменше одним спеціальним механізмом машини 1 не залежить ні від досвіду, ні від технічних знань користувача. Автоматичний режим є режимом виявлення команд щонайменше одного засобу 5 керування трактором 2. У цьому режимі виявлення зміни стану засобу 5 керування приводить до подачі команди на одну або декілька дій на рівні машини 1. За рахунок цього виявлення електронний блок 10 машин 1 отримує інформацію про дію або намір користувача, зокрема, щодо його маніпуляції пристроєм б керування трактора 2. Зміна стану одного із засобів 5 керування може також входити до послідовності трактора 2, заздалегідь запущену користувачем. Відповідно до кращого варіанту виконання, система 11 контролю заснована тільки на датчику(ах), пов'язаному(их) із машиною 1. Вона контролює датчики, встановлені на машині 1, і подає інформацію до електронного блока 10 машин 1. У іншому варіанті виконання датчики можуть бути встановлені як на машині 1, так і на тракторі 2. У іншому випадку датчики встановлені тільки на тракторі 2, і електронний блок 10 має доступ до інформації через мережу зв'язку або через прямий вхід в кабіні 4 керування за допомогою роз'єму. Пристрій 6 керування трактором 2 знаходиться в кабіні 4 керування. Він має інтерфейс керування і/або дисплей для виведення користувачеві тих даних, які надходять від обчислювального пристрою 7. Інтерфейс керування дозволяє маніпулювати засобами 5 керування за допомогою класичних засобів, таких як важелі 13 і/або кнопки 14. Засобами 5 керування трактора 2 для приведення в дію машини 1 бажано є приводи, такі як зчеплення 15 або вал 16 відбору потужності. Засобом 5 керування може бути також розподільник потужності, такий як гідравлічний розподільник 17 або електричний розподільник потужності. Як правило, і як показано на Фіг. 2, до стандартного устаткування трактора 2 входять зчеплення 15 і вал 16 відбору потужності, які знаходяться ззаду, а також гідравлічні розподільники17. Сучасніші трактори містять також зчеплення та вал відбору потужності спереду. На Фіг. 2 показана сільськогосподарська машина 1 типу комбінованої сівалки, зчеплена з трактором 2. Трактор 2 містить заднє зчеплення 15 та задній вал 16 відбору потужності. Бажано зчеплення 15 виконане триточковим. Ця машина є напівнавісною і з'єднана з двома нижніми тягами триточкового зчеплення трактора 2 за допомогою зчіпної штанги 20. Комбінована сівалка містить дишло 21 та опирається на землю через базу 22, обладнану колесами. Вона містить інструмент 23 для обробки ґрунту і сівалку 24. Інструмент 23 для обробки ґрунту готує насінне ложе. У даному прикладі представлена ротаційна борона, яка має ротори, з'єднані з кесоном, при цьому кожен з роторів обладнаний двома ножами 25. Ротори приводяться в обертання навколо відповідної вертикальної осі за допомогою вала 16 відбору потужності трактора 2. Вал 16 відбору потужності обертає ротори через центральну коробку за допомогою трансмісії 26 у вигляді телескопічного вала з універсальними шарнірами. Подрібнення землі залежить від швидкості обертання роторів, від швидкості руху машини і від щільності ґрунту. У задній частині ротаційна борона містить обмежувальний каток 27, призначений також для контролю глибини обробки ґрунту. Інструмент 23 розташовано, горизонтально і перпендикулярно до напрямку руху А. Він знаходиться між дишлом 21 і базою 22. З одного боку його з'єднано з дишлом 21 через перший паралелограм 28, аз іншого боку - з базою 22 через другий паралелограм 29. Кожен паралелограм 28, 29 може деформуватися за допомогою відповідного силового циліндра 30, 31. Паралелограми 28, 29 забезпечують, вертикальний підйом інструмента 23 та його переміщення у площині, паралельній до ґрунту. Переміщення у площині, паралельній до ґрунту, 3 UA 84802 U 5 10 15 20 25 30 35 40 45 50 55 60 забезпечується за рахунок синхронізованого живлення силових циліндрів 30, 31. Детальніше ці елементи описані в документі FR 0553622. Під час роботи користувач не впливає на висоту зчеплення 15 тракторів 2. Керування вертикальним переміщенням інструмента 23 здійснює електронний блок 10 разом з системою 11 контролю. Електронний блок 10 сполучений з системою 11 контролю, яка містить також датчик 32, який контролює швидкість обертання на рівні трансмісії 26 ротаційної борони. За рахунок контролю швидкості обертання трансмісії 2 6 електронний блок 10 отримує інформацію про обертання валу 16 відбору потужності трактора 2. При роботі трансмісія 2 6 з'єднується з валом 16 відбору потужності трактора 2. Залежно від даних про характер роботи і/або положення, які надходять від системи 11 контролю, електронний блок 10 може автоматично здійснювати керування дією або діями спеціальних механізмів 9 машини 1. У електронному блоці 10 записані програми у вигляді послідовностей для відповідних дій, які запускаються, наприклад, під час розворотів в кінці поля. Таким чином, електронний блок 10 подає команду про наступну дію: підйом інструмента 23 вгору шляхом подачі живлення на два силові циліндри 30 і 31, коли датчик 32 визначає нульову швидкість обертання на рівні трансмісії 26. Коли швидкість обертання трансмісії 2 6 дорівнює нулю, це означає, що користувач натиснув на кнопку 14 і повернув важіль 13 для зупинки валу 16 відбору потужності, або, що зупинка валу 16 відбору потужності увійшла невід'ємною частиною в послідовність дій трактора 2, запущену користувачем. Відомим є програмування відповідних дій, яке включається під час розвороту в кінці поля у вигляді послідовностей за допомогою пристрою 6 керування трактора 2. Електронний блок 10 машини 1 керує специфічними функціями як інструмента 23, так і сівалки 24. Сівалка 24 встановлена позаду інструмента 23 у напрямку руху А. Таким чином, підготовка ґрунту та посів відбуваються під час одного проходження. Завдяки цій комбінації, скорочується час робіт при посіві, обмежується утрамбовування ґрунту, і зменшуються витрати. Як відомо, сівалка 24 містить, зокрема, бункер 33 і пристрої 34 закладення або посадки в ґрунт. Бажано, щоб бункер 33 був встановлений на вказаній базі 22, а пристрої 34 посадки в ґрунт були встановлені позаду вказаної бази 22 з можливістю переміщення по висоті через зчеплення та силові циліндри. Бункер 33 є ємкістю для насіння і розподільником, який дозволяє подавати з бункера 33 певну кількість насіння і підтримувати постійне дозування, незалежно від робочих умов. Для сівалки з пневматичною системою подачі насіння спрямовується до пристроїв 34 повітряним потоком гнучкими трубками. Повітряний потік створюється турбіною, яка приводиться в обертання, наприклад, за допомогою вала 16 відбору потужності трактора 2. Завдяки пневматичній подачі насіння до пристроїв 34, ширина обробки не залежить від ширини бункера 33. Пристрій 34 створює борозну певної глибини для посіву насіння і закривання його землею. Як правило, пристрій 34 посадки в землю пов'язаний з пристроєм закривання. Оскільки сівалка 24 встановлена позаду інструмента 23, необхідно мати можливість зсуву сівалки, щоб запобігти посіву насіння в не розпушений і в не вирівняний ґрунт. Спеціальна послідовність "початку роботи" електронного блока 10 дозволяє здійснювати керування зсувом сівалки 24 відносно інструмента 23. Електронний блок 10 виконаний з можливістю визначення місця, де сівалка 24 повинна почати посів, за допомогою власних характеристик машини 1. Зсув між введенням в ґрунт інструмента 23 та введенням в ґрунт пристроїв 34 посадки сівалки 24 дозволяє зменшити ширину крайових смуг на кінцях поля. Таким чином, завдяки автоматичному режиму визначення, електронний блок 10 може подати команду на послідовність дій: підйом ротаційної борони, зупинку розподілу і підйом пристроїв 34 посадки в ґрунт, коли обертання трансмісії 26 і, відповідно, вала 16 відбору потужності зупиняється при наближенні до кінця поля. Для цього користувач натискає або на кнопку 14 для зупинки обертання вала 16 відбору потужності, або на кнопку запуску послідовності дій трактора 2, що включає зупинку обертання вала 16 відбору потужності. Як тільки вал 16 відбору потужності перестає обертатися, інструмент 23 відходить від ґрунту, а трактор 2 продовжує рух, при цьому пристрої 34 сівалки автоматично піднімаються для здійснення розвороту в кінці поля. Для відновлення роботи, коли машина 1 і трактор 2 знову виявляються на одній лінії, користувач натискає на кнопку для приводячи, тим самим, в обертання вал 16 відбору потужності. Датчик 32 відзначає цю зміну стану та направляє інформацію до електронного блока 10, який подає команду на послідовність дій: переміщення силових циліндрів 30 і 31, опускання на ґрунт інструмента 23, запуск розподілу зерна і опускання пристроїв 34 посадки в ґрунт для посіву. Інструмент 23 і сівалка 24 знаходяться у контакті з ґрунтом під час роботи, тоді як при транспортуванні їх піднімають. Завдяки такому способу керування з автоматичним детектуванням, спрощуються маніпуляції користувача. Користувач впливає тільки на важіль 13 або на кнопку 14 перед 4 UA 84802 U 5 10 15 20 25 30 35 40 45 50 55 60 розворотом і може більше зосередитися на керуванні трактором 2. Послідовність розвороту машини 1 синхронізована з послідовністю розвороту трактора 2. Продуктивність машини підвищується, оскільки скорочується час, необхідний для маневрів при розвороті. Виключається вірогідність зіткнення трактора 2 та машини 1. Крім того, в електронному блоці 10 містяться параметри, характерні для машини, і всі програми, необхідні для її роботи. Таким чином, навіть якщо машина характеризується складним ходом, електронний блок 10 може здійснювати керування нею. Він використовує роботу системи 11 контролю, зокрема, дані від встановлених на машині датчиків. Цей спосіб керування залишається функціональним, незалежно від типу трактора, який приводить в рух машину. Зчіпна штанга 20 з'єднана з дишлом 21 через шарнір 35 з вертикальною віссю. Завдяки цьому шарніру 35, який забезпечує великі кути повороту між дишлом 21 і зчіпною штангою 20, з'єднаною з нижньою тягою зчеплення трактора 2, площа маневру в кінці поля, зокрема, під час розвороту, зменшується, і підвищується маневреність для вирівнювання машини 1 з трактором 2. Ці великі кути повороту вимагають зупинки вала 16 відбору потужності під час кожного розвороту, тому описаний спосіб представляє особливий інтерес. У не показаному на фігурах варіанті виконання кінець дишла 21 містить зчіпне кільце або зчіпну кулю. В цьому випадку відпадає необхідність в шарнірі 35, оскільки зчіпне кільце або куля забезпечують поворот навколо вертикальної осі. За допомогою команд з електронного блока 10 можна здійснювати інші специфічні функції машини 10, наприклад, функцію "розмітки" або функцію "внесення добрив". Сівалка 24 містить бічні маркери, які розмічають лінії, за якими трактор 2 повинен слідувати під час наступного проходження. За допомогою відповідної програми електронний блок 10 керує опусканням або підйомом бічних маркерів, відповідно. Коли сівалка 24 виконує також функцію внесення добрив, посів і внесення добрив відбуваються під час одного проходження. В цьому випадку електронний блок 10 керує також включенням/виключенням пристрою дозування добрив. Окрім пристроїв посадки в ґрунт 34, таких як сошники для посіву, сівалка 24 обладнана також сошниками для внесення добрив. В цьому випадку бункер 33 розділений на дві частини, з одного боку - для насіння, а з іншого боку - для добрива. У альтернативному варіанті можна передбачити додатковий бункер, спарений з бункером 33 сівалки. Для машини, яка може складатися, трансмісію 26 замінюють на первинну трансмісію та дві вторинні трансмісії. На кожній вторинній трансмісії встановлений датчик 32. Відповідно до іншого варіанту виконання, не показаного на кресленнях, інструмент 23 і сівалку 24 виконують більше ніж із двох частин. Залежно від технічних можливостей машини 1 електронний блок 10 може складатися з декількох підблоків. Для сільськогосподарської машини 1 з пультом 12, останній розміщують в кабіні 4 керування. Він містить елементи керування та/або індикатори. Пульт 12 може бути виконаний з ручкою керування, яка полегшує доступ до засобів керування. На Фіг. 3 показана машина для сінозбиральних робіт, наприклад, сіноворушилка, яка містить раму 40, остання може бути з'єднана з трактором, призначеним для приведення її в дію і переміщення у напрямку руху А. На Фіг. 3 представлений частковий вигляд зверху. На рамі 40 встановлено декілька роторів 41 для ворушіння сіна, виконаних з можливістю займати робоче положення, в якому вони виявляються власне кажучи перпендикулярними до напрямку руху А, і транспортне положення, в якому ротори 41 відкидаються до центру машини і вперед для зменшення її ширини і висоти. Рама 40 містить центральну конструкцію 42 і дві бічні конструкції 43, на яких встановлені ротори 41. На Фіг. 4 показана частина рами 40 машин 1. Бічні конструкції 43 шарнірно з'єднані з центральною конструкцією 42 за допомогою вертикальних осей 44. Кожна бічна конструкція 43 містить горизонтальну шарнірну вісь 45, направлену у бік напрямку руху А в робочому положенні. Перший гідравлічний силовий циліндр 46 пов'язаний з кожною бічною конструкцією 43 для її переміщення навколо відповідної шарнірної осі 45. Другий гідравлічний силовий циліндр 47 пов'язаний з кожною бічною конструкцією 43 для її переміщення навколо, власне кажучи, вертикальної осі 44. Як відомо, кожна бічна конструкція 43 містить внутрішню ділянку з двома встановленими на ній роторами 41 та п'ять бічних ділянок, на кожній з яких встановлений один ротор 41. Число бічних ділянок може змінюватися залежно від необхідної ширини обробки. Ділянки з'єднані між собою за допомогою шарнірної осі 48, в робочому положенні направленої у бік напрямку руху А. Ці шарнірні осі 48 дозволяють ділянкам повертатися одна відносно одної, щоб повторювати характер нерівностей ґрунту. Вказані повороти обмежені упорами, розташованими з обох сторін від шарнірних осей 48. Кожна бічна конструкція 43 містить дві бічні ділянки, що знаходяться ближче до зовнішньої сторони, які можуть складатися під кутом приблизно 180° навколо шарнірної осі 48 передостанньої бічної ділянки. Це дозволяє прибирати зовнішні бічні ділянки на сусідні ділянки 5 UA 84802 U 5 10 15 20 25 30 35 40 45 50 55 60 з метою зменшення ширини бічних конструкцій 43, зокрема, для транспортування. Вказане складання забезпечується з кожного боку за допомогою відповідного третього гідравлічного силового циліндра 49. Передня частина центральної конструкції 42 містить опорні колеса 50, які котяться по землі під час роботи і під час транспортування. У робочому положенні вони підтримують передню частину з метою розвантаження коліс роторів 41. У транспортному положенні вони підтримують також задню частину і бічні конструкції 43. Вказані колеса 50 встановлені на стояках, що переміщаються у висоту навколо осі 51. Четвертий гідравлічний силовий циліндр 52 дозволяє піднімати або опускати опорні колеса 50 навколо осі 51. Детальніше ця сіноворушилка описана в документі FR 2890526. Трактор 2, спеціальні механізми 9, зокрема силові циліндри 46, 47, 49, 52 машини 1 і система 11 контролю схематично показані на Фіг. 3. Силові циліндри з'єднані гідравлічним контуром з гідравлічним джерелом, яке включає резервуар, насос і, принаймні один розподільник 17. Таке гідравлічне джерело, як правило, встановлене на тракторі 2, який буксирує машину 1. Воно може також частково або повністю входити до складу вказаної машини 1. Розподільник 17 може знаходитися в трьох положеннях. Важіль 13 дозволяє вибрати одне з цих положень. Система 11 контролю, яка містить два датчики 53 та 54, дозволяє визначати напрямок потоку мастила в контурі. Датчики вимірюють тиск та/або витрати мастила на виході з гідравлічного джерела. Для вищеописаної сіноворушилки електронний блок 10 містить програму, з щонайменше двома послідовностями дій, зокрема, з однією послідовністю дій, пов'язаною з рухами складання, і з іншою послідовністю дій, пов'язаною з рухами розкладання. Коли один з датчиків 53 або 54 визначає тиск в одному з трубопроводів контуру, відповідна інформація надходить до електронного блока 10, який подає команду на відповідну послідовність дій. На схемі, показаній на Фіг. 3, користувач діє на важіль 13 подаючи, тим самим, команду про розкладання сіноворушилки. Датчик 53 визначає високий тиск в першому трубопроводі живлення. Це запускає серію дій з переміщення елементів сіноворушилки з метою переходу в робоче положення. Спочатку подається живлення на другі силові циліндри 47, щоб вони перемістили бічні конструкції 43 назад навколо вертикальних шарнірних осей 44. Потім за подачею живлення на перші силові циліндри 46 відбувається подача живлення на четверті силові циліндри 52 для підняття коліс 50, так щоб вони опустили бічні конструкції 43 навколо шарнірних осей 45 до положення, в якому колеса роторів 41 входять в контакт із землею, і для завершення подачі живлення на треті силові циліндри 49 з метою розкладання двох зовнішніх бічних ділянок. Різні силові циліндри обладнані датчиками кінця ходу, що дозволяє разом з електронним блоком 10 забезпечувати повне виконання кожної дії. На рівні шарнірної осі 44 передбачений також датчик положення. Коли користувач вирішує перейти в положення транспортування, він натискає на важіль 13 в іншому напрямку, і у цей момент інший датчик 54 визначає зміну тиску мастила, який залишається високим, і цей датчик 54 передає дані до електронного блока 10. Це визначення призводить під контролем електронного блока 10 до подачі команди на запуск послідовності дій для складання. В цьому випадку описані вище дії відбуваються в зворотному порядку. Електронний блок 10 керує складанням двох зовнішніх бічних ділянок через треті силові циліндри 49, потім підйомом бічних конструкцій 43 навколо горизонтальних шарнірних осей 45 до положення, в якому колеса роторів 41 більше не торкаються землі, через перші силові циліндри 46. Після цього збільшують кліренс, колеса 50 центральної конструкції 42 опускаються за допомогою четвертого гідравлічного силового циліндра 52 і, кінець кінцем, переміщають бічні конструкції 43 вперед навколо вертикальних шарнірних осей 44 за допомогою других силових циліндрів 47. У цьому положенні обидві бічні конструкції 43 є паралельними, при цьому загальна ширина машини є меншою від загальної ширини в робочому положенні двох роторів 41, які знаходяться всередині машини. Після цього вказані бічні конструкції 43 можуть спиратися на опори, виконані на центральній конструкції 42, та стопоритися на цих опорах. Завдяки системі 11 контролю і управлінню електронним блоком 10, різні рухи бічних конструкцій 43 координуються і відбуваються один за одним, незалежно від досвіду користувача. Зникає небезпека зіткнення між різними роторами 41, бічними конструкціями 43 і центральною конструкцією 41. Для забезпечення оптимальної безпеки способу керування різні положення зовнішніх бічних ділянок та бічних конструкцій 43 контролюються датчиками положення. Корисну модель можна застосовувати для будь-якої машини, в якій використовується описаний вище спосіб керування. Зрозуміло, корисна модель не обмежується описаними вище і представленими на приведених кресленнях варіантами виконання. До нього можна вносити зміни, зокрема, 6 UA 84802 U змінювати склад або число різних елементів або замінювати їх на технічні еквіваленти, не виходячи при цьому за рамки обсягу формули корисної моделі. Машина може бути навісною, буксированою або напівнавісною. 5 10 15 20 25 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Спосіб керування дією або послідовністю дій сільськогосподарської машини (1), оснащеної електронним блоком (10) і з'єднаної з трактором (2), при цьому вказаний трактор (2) містить щонайменше один засіб (5) керування, який відрізняється тим, що дія або послідовність дій, яка здійснюється вказаною машиною (1) запускається автоматично через контроль електронного блока (10) шляхом виявлення зміни стану одного із засобів (5) керування вказаним трактором (2) за допомогою системи (11) контролю, яка направляє інформацію до вказаного електронного блока (10). 2. Спосіб за п. 1, який відрізняється тим, що вказаним засобом (5) керування є привід, зв'язаний з сільськогосподарською машиною (1). 3. Спосіб за будь-яким з пп. 1 або 2, який відрізняється тим, що засіб (5) керування, зв'язанийз сільськогосподарською машиною (1), є валом (16) відбору потужності, сполученим з трансмісією (26) вказаної машини (1), а система (11) контролю містить датчик (32) вимірювання швидкості обертання. 4. Спосіб за будь-яким з пп. 1 або 2, який відрізняється тим, що засіб (5) керування, зв'язаний з сільськогосподарською машиною (1), є гідравлічним розподільником (17), а система (11) контролю містить щонайменше один датчик тиску або витрати. 5. Спосіб за п. 1, який відрізняється тим, що систему 11 контролю встановлюють на вказаній машині (1) та/або на вказаному тракторі (2). 6. Спосіб за п. 5, який відрізняється тим, що коли система (11) контролю встановлена на тракторі (2), електронний блок (10) має доступ до інформації через мережу зв'язку або через прямий вихід даних в кабіні (4) керування за допомогою роз'єму. 7. Спосіб за п. 1, який відрізняється тим, що електронний блок (10) містить мікропроцесор, який взаємодіє з програмою та керує різними механізмами (9) сільськогосподарської машини (1) за допомогою принаймні однієї послідовності дій. 8. Спосіб за п. 1, який відрізняється тим, що електронний блок (10) містить декілька підблоків, кожен з яких включає мікропроцесор та програму і які з'єднані між собою за допомогою засобу зв'язку, причому вказаний електронний блок (10) керує різними механізмами (9) сільськогосподарської машини (1) за допомогою щонайменше однієї послідовності дій. 7 UA 84802 U 8 UA 84802 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори англійськоюRenard Herve, Le Bars Jean-Michel, Kirch Michel
Автори російськоюКирш Мишель
МПК / Мітки
МПК: A01B 69/00, A01B 63/02
Мітки: послідовністю, спосіб, машини, дій, керування, дією, сільськогосподарсько
Код посилання
<a href="https://ua.patents.su/11-84802-sposib-keruvannya-diehyu-abo-poslidovnistyu-dijj-silskogospodarsko-mashini.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування дією або послідовністю дій сільськогосподарської машини</a>
Спосіб визначення маси сільськогосподарської машини
Номер патенту: 83617
Опубліковано: 25.09.2013
Автори: Лебедєв Сергій Анатолійович, Кот Олександр Володимирович, Артьомов Микола Прокопович, Лебедєв Анатолій Тихонович
МПК: G01G 17/00
Мітки: сільськогосподарсько, спосіб, визначення, машини, маси
Формула / Реферат:
Спосіб визначення маси начіпної сільськогосподарської машини, що включає вимір поздовжнього прискорення руху тракторного агрегату, який відрізняється тим, що прискорення вимірюють на певному ґрунтовому фоні, наприклад на ґрунтовій дорозі, при вибігу (вимкнена муфта зчеплення) до повної зупинки трактора з сільськогосподарською машиною та без неї при однаковій швидкості початку вибігу.
Спосіб керування збиральною машиною, спосіб визначення шляху керованої збиральної машини для збирання врожаю сільськогосподарської культури на лану та спосіб розділення зібраного продукту для збиральної машини
Номер патенту: 92501
Опубліковано: 10.11.2010
Автори: Хендріксон Ларрі Лі, Пікетт Теренс Деніел
МПК: A01B 69/00
Мітки: керованої, збиральної, шляху, сільськогосподарсько, машини, лану, зібраного, керування, спосіб, визначення, збиральною, врожаю, продукту, збирання, культури, розділення, машиною
Формула / Реферат:
1. Спосіб керування збиральною машиною для збирання врожаю сільськогосподарської культури на лану, який включає наступні стадії:а) стадію, на якій одержують специфічну для ділянки інформацію, яка включає інформацію про відмітку висоти лану та багатоспектральне зображення лану, причому інформація відноситься до однієї або кількох властивостей сільськогосподарської культури;б) стадію, на якій специфічну для ділянки інформацію...
Пристрій керування робочими органами сільськогосподарської машини
Номер патенту: 2528
Опубліковано: 26.12.1994
Автори: Кучеренко Григорій Федорович, Синякевич Володимир Макарович
МПК: A01B 63/10
Мітки: робочими, керування, пристрій, органами, машини, сільськогосподарсько
Формула / Реферат:
Устройство управления рабочими органами сельскохозяйственной машины, включающее насос, секционный гидрораспределитель, гидроцилиндр подъема сменных рабочих органов и гидроцилиндр управления направителем растительной массы, рычаги подъема и уравновешивания, отличающееся тем, что оно снабжено управляемым запорным клапаном, соединенным прямым входом с бесштоковыми полостями обоих гидроцилиндров, а управляемым - со штоковой полостью гидроцилиндра...
Привод активного робочого органу сільськогосподарської машини
Номер патенту: 53653
Опубліковано: 11.10.2010
Автори: Попик Павло Сергійович, Топчій Сергій Іванович
МПК: A01B 35/00
Мітки: органу, робочого, сільськогосподарсько, активного, привод, машини
Формула / Реферат:
Привод активного робочого органу сільськогосподарської машини, в якому робочий орган закріплений на повідку, приєднаному до рами машини, який відрізняється тим, що робочий орган має у верхній частині з'єднаний з ним гідроциліндр, олива до якого надходить з гідросистеми трактора через розподільник з електромагнітним керуванням, сигнали до якого надходять з блока керування, а сам робочий орган шарнірно приєднують до повідка.
Послідовність днк, рекомбінантна молекула днк, експресійний вектор днк, клітина-хазяїн, стабільно трансформована послідовністю днк, рослина та її потомство, стабільно трасформовані послідовністю днк, та спосіб
Номер патенту: 86341
Опубліковано: 27.04.2009
Автори: де Хаан Петрус Теодорус, Хон Томас, Лігон Хоуп Томпсон, Ставолоне Лівія, Кононова Марія
МПК: C12N 15/09, C12N 15/82, C07K 14/01
Мітки: спосіб, молекула, днк, потомство, клітина-хазяїн, рослина, трасформовані, рекомбінантна, трансформована, вектор, стабільної, послідовність, послідовністю, експресійний
Формула / Реферат:
1. Послідовність ДНК, яка має здатність забезпечувати експресію зв'язаної з нею нуклеотидної послідовності, де послідовність ДНК включає нуклеотидну послідовність, представлену в SEQ ID NO:1.2. Послідовність ДНК за п. 1, де послідовність ДНК включає нуклеотидну послідовність, представлену в SEQ ID NO:2.3. Послідовність ДНК за п. 1, де послідовність ДНК включає нуклеотидну послідовність, представлену в SEQ ID NO:3.4....
Попередній патент: Спосіб превентивної діагностики діабетичної ангіопатії у хворих на цукровий діабет 2 типу
Наступний патент: Застосування продукту сповільненого напівкоксування важких нафтових залишків як добавки до вугільних шихт
Випадковий патент: Ґрунтообробний агрегат