Спосіб керування збиральною машиною, спосіб визначення шляху керованої збиральної машини для збирання врожаю сільськогосподарської культури на лану та спосіб розділення зібраного продукту для збиральної машини

Формула / Реферат
1. Спосіб керування збиральною машиною для збирання врожаю сільськогосподарської культури на лану, який включає наступні стадії:
а) стадію, на якій одержують специфічну для ділянки інформацію, яка включає інформацію про відмітку висоти лану та багатоспектральне зображення лану, причому інформація відноситься до однієї або кількох властивостей сільськогосподарської культури;
б) стадію, на якій специфічну для ділянки інформацію вводять у процесор;
в) стадію, на якій формують карту розрахункового рівня властивостей сільськогосподарської культури принаймні для однієї властивості сільськогосподарської культури, використовуючи специфічну для ділянки інформацію та проби, взяті у точках відбору проб, які виключають точки відбору проб у перехідних зонах між різними зонами рівнів властивостей сільськогосподарської культури, причому розрахунковий рівень властивостей сільськогосподарської культури включає вміст білка, крохмалю, олії, цукру або рівень вологи сільськогосподарської культури; й
г) стадію, на якій під час збирання врожаю карту властивостей використовують для направлення збиральної машини і для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури на основі інформації про відмітку висоти лану та багатоспектрального зображення лану.
2. Спосіб за п. 1, який далі включає стадію, на якій, виходячи з карти властивостей, формують переважний шлях направлення, а стадія, на якій збиральною машиною керують, включає стадію, на якій збиральну машину направляють відповідно до переважного шляху направлення.
3. Спосіб за п. 1, який відрізняється тим, що до специфічної для ділянки інформації включають одне або кілька з наступного: попередній врожай сільськогосподарської культури, розрахунковий врожай сільськогосподарської культури й умови навколишнього середовища.
4. Спосіб за п. 1, який відрізняється тим, що стадія, на якій збиральною машиною керують, включає стадію, на якій зібрану сільськогосподарську культуру направляють до вибраної зони зберігання, і тим, що зону зберігання вибирають залежно від розрахункового рівня властивості сільськогосподарської культури.
5. Спосіб за п. 1, який відрізняється тим, що стадія, на якій формують карту властивостей, включає стадію, на якій визначають зони схожих специфічних для ділянки характеристик властивостей сільськогосподарської культури і формують точки відбору проб у межах взагалі однорідних площ цих зон.
6. Спосіб за п. 5, який відрізняється тим, що стадія, на якій формують карту властивостей, далі включає стадію, на якій аналізують проби із точок відбору проб, де перехідні зони визначають шляхом розрахунку похилу, який розраховують на основі відношення зміни кількості зон до відстані між зонами.
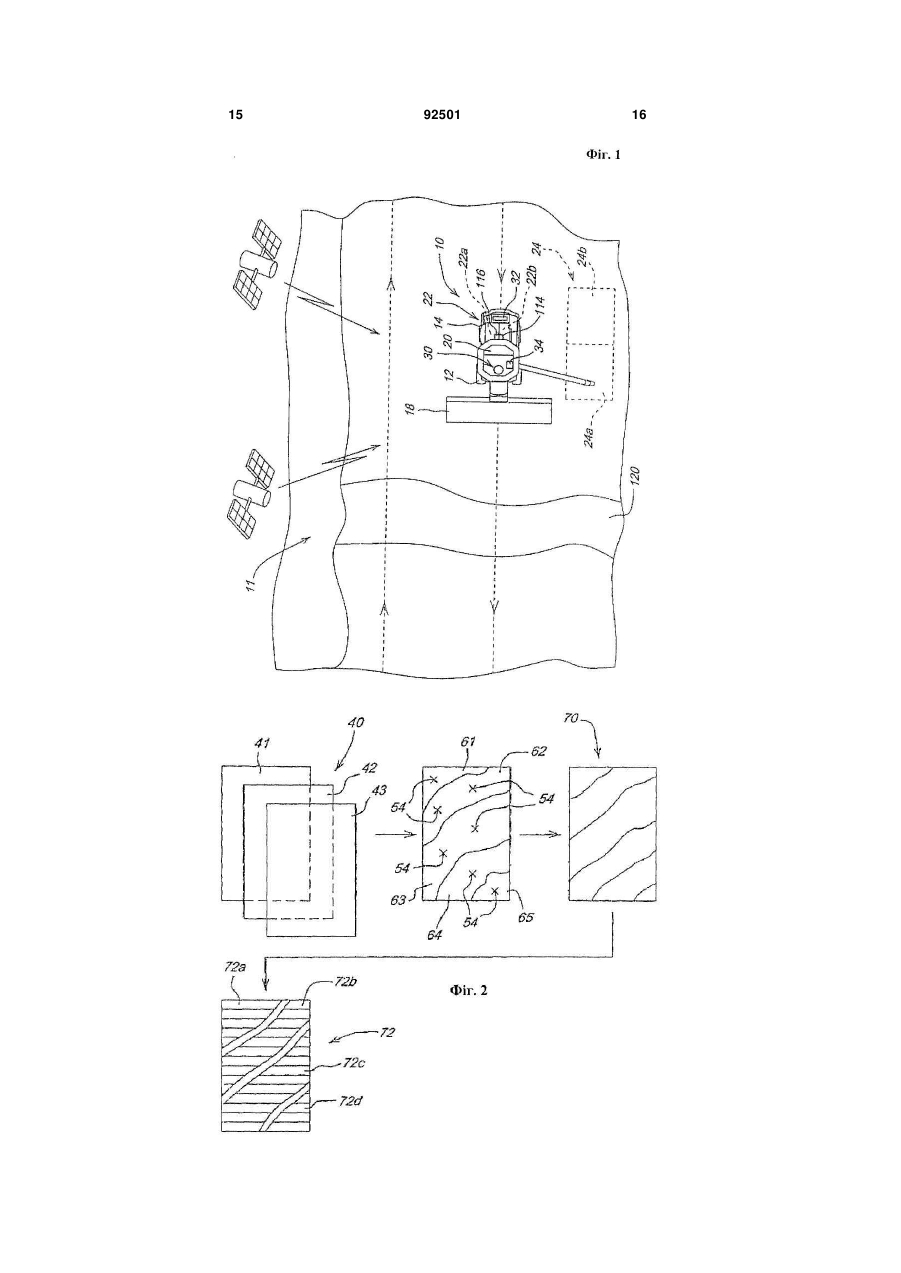
7. Спосіб за п. 6, який далі включає стадію, на якій визначають переважний шлях збирання врожаю для мінімізації змінності властивостей при збиранні.
8. Спосіб за п. 7, який відрізняється тим, що стадія, на якій визначають переважний шлях збирання врожаю, включає стадію, на якій час збирання врожаю мінімізують з одночасним підтримуванням мінімізованої змінності властивостей.
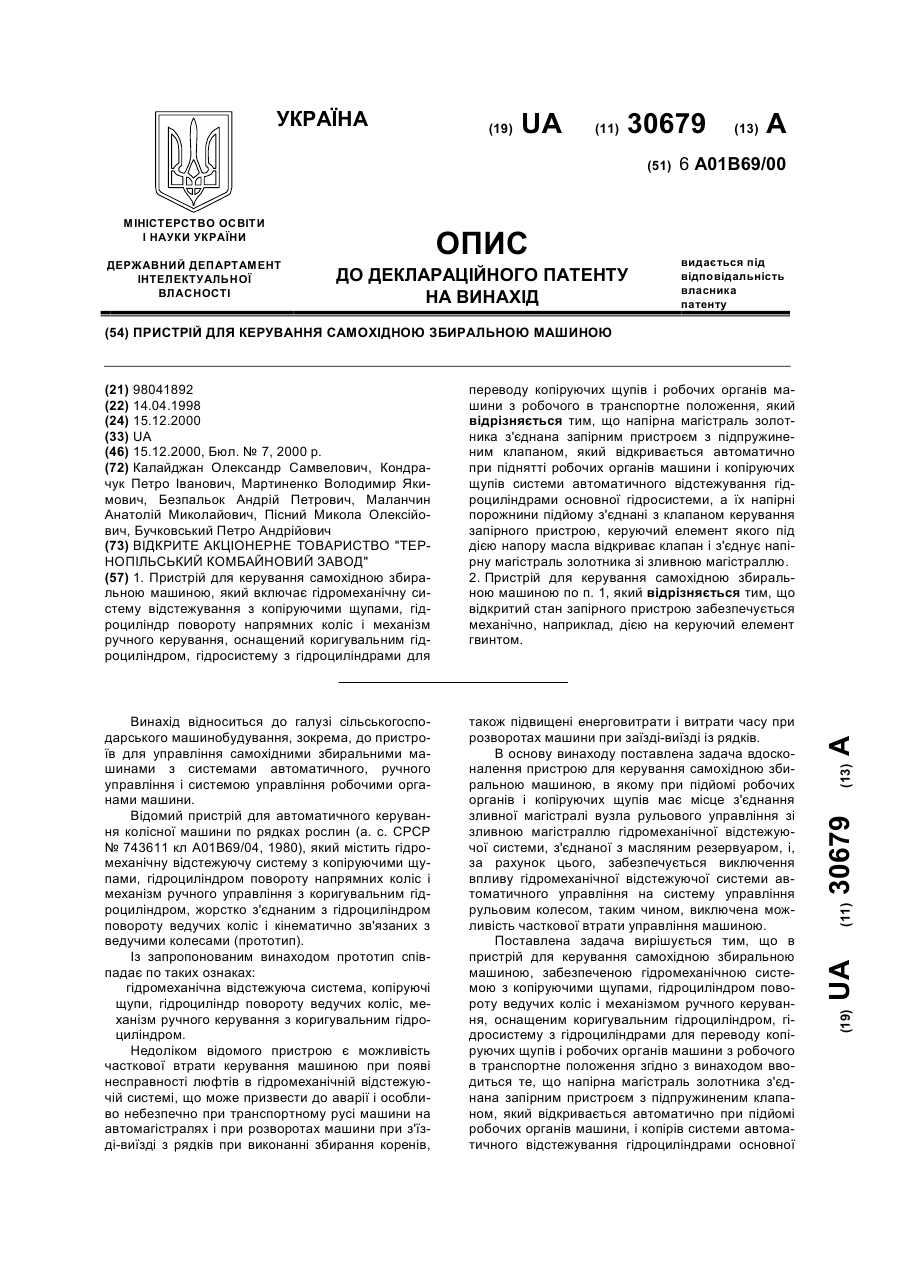
9. Спосіб визначення шляху керованої збиральної машини для збирання врожаю сільськогосподарської культури на лану, який включає наступні стадії:
а) стадію, на якій одержують специфічну для ділянки інформацію, яка включає інформацію про відмітку висоти лану та багатоспектральне зображення лану;
б) стадію, на якій специфічну для ділянки інформацію вводять у процесор;
в) стадію, на якій формують карту розрахункового рівня властивостей сільськогосподарської культури принаймні для однієї властивості сільськогосподарської культури, використовуючи специфічну для ділянки інформацію та проби, взяті у точках відбору проб, які виключають точки відбору проб у перехідних зонах між різними зонами рівнів властивостей сільськогосподарської культури, причому розрахунковий рівень властивостей сільськогосподарської культури включає вміст білка, крохмалю, олії, цукру або рівень вологи сільськогосподарської культури; й
г) стадію, на якій під час збирання врожаю збиральну машину направляють, використовуючи карту властивостей, для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури на основі інформації про відмітку висоти лану та багатоспектрального зображення лану.
10. Спосіб за п. 9, який відрізняється тим, що стадія, на якій одержують карту властивостей, включає стадію, яка забезпечує дистанційне зображення лану, і стадію, на якій зображення перетворюють у зони зі схожими характеристиками.
11. Спосіб за п. 9, який відрізняється тим, що стадія, на якій одержують специфічну для ділянки інформацію, включає стадію, на якій формують точки відбору проб у межах площі лану, і стадію, на якій аналізують проби із сформованих точок відбору проб, і тим, що результати відбору проб з проаналізованих проб використовують для формування карти властивостей.
12. Спосіб за п. 11, який відрізняється тим, що стадія, на якій формують точки відбору проб, включає стадію, на якій формують точки відбору проб із взагалі однорідної площі лану.
13. Спосіб за п. 10, який відрізняється тим, що включає стадію, на якій в межах площ зон формують точки відбору проб, і стадію, на якій аналізують проби із точок відбору проб, де перехідні зони визначають шляхом розрахунку похилу, який розраховують на основі відношення зміни кількості зон до відстані між зонами.
14. Спосіб за п. 13, який відрізняється тим, що включає стадію, на якій точкам відбору проб надають інформацію про місцезнаходження, одержану за допомогою GPS.
15. Спосіб за п. 9, який відрізняється тим, що включає стадію, на якій, виходячи з карти властивостей, формують переважний шлях збирання врожаю, причому стадія, на якій збиральну машину направляють, включає стадію, на якій збиральну машину направляють вздовж переважного шляху.
16. Спосіб за п. 15, який відрізняється тим, що стадія, на якій збиральною машиною керують, включає стадію, на якій збиральну машину направляють автоматично відповідно до переважного шляху.
17. Спосіб за п. 15, який відрізняється тим, що стадія, на якій формують переважний шлях, включає стадію, на якій шлях формують таким чином, щоб мінімізувати як змінність властивостей зібраної сільськогосподарської культури, так й час збирання сільськогосподарської культури.
18. Спосіб за п. 9, який відрізняється тим, що до специфічної для ділянки інформації включають одне або кілька з наступного: попередній врожай сільськогосподарської культури, розрахунковий врожай сільськогосподарської культури й умови навколишнього середовища.
19. Спосіб за п. 9, який відрізняється тим, що як керовану збиральну машину використовують одне або кілька з наступного: комбайн, шпиндельну бавовнозбиральну машину, сінний прес, плодозбиральну машину й фуражну техніку для збирання сільськогосподарських культур.
20. Спосіб розділення зібраного продукту для збиральної машини, який включає наступні стадії:
а) стадію, на якій одержують специфічну для ділянки інформацію, яка відноситься до властивостей сільськогосподарської культури, специфічна для ділянки інформація включає інформацію про відмітку висоти лану та багатоспектральне зображення лану;
б) стадію, на якій формують карту розрахункового рівня властивостей сільськогосподарської культури принаймні для однієї властивості сільськогосподарської культури, використовуючи специфічну для ділянки інформацію та проби, взяті у точках відбору проб, які виключають точки відбору проб у перехідних зонах між різними зонами рівнів властивостей сільськогосподарської культури, причому розрахунковий рівень властивостей сільськогосподарської культури включає вміст білка, крохмалю, олії, цукру або рівень вологи сільськогосподарської культури; й
в) стадію, на якій під час збирання врожаю збиральною машиною керують, використовуючи карту властивостей, для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури, причому стадія, на якій керують, включає стадію, на якій збиральну машину направляють залежно від властивостей сільськогосподарської культури на основі інформації про відмітку висоти лану та багатоспектрального зображення лану.
21. Спосіб за п. 20, який відрізняється тим, що стадія, на якій збиральною машиною керують, включає також стадію, на якій зібраний продукт направляють до вибраної зони зберігання, і тим, що зону зберігання вибирають залежно від розрахункового рівня властивостей сільськогосподарської культури.
22. Спосіб за п. 21, який відрізняється тим, що стадія, на якій зібраний продукт направляють до вибраної зони зберігання, включає стадію, на якій продукт направляють до одного або кількох з наступного: одне з кількох місць зберігання на збиральній машині; вантажний транспортний засіб, який використовують для перевезення сільськогосподарської культури з лану; одна з двох або більше пресувальних камер; контейнери для продукції на збиральній машині; контейнери для продукції поруч зі збиральною машиною; і пристрій для перевезення вивантаженої сільськогосподарської культури, у який сільськогосподарську культуру відразу вивантажують зі збиральної машини при русі збиральної машини по лану.
23. Спосіб за п. 20, який відрізняється тим, що стадія, на якій збиральною машиною керують, включає стадію, на якій, використовуючи карту властивостей, збиральну машину направляють таким чином, щоб мінімізувати змінність властивостей зібраної сільськогосподарської культури.
24. Спосіб за п. 23, який відрізняється тим, що стадія, на якій збиральну машину направляють, включає стадію, на якій, використовуючи карту властивостей, визначають переважний шлях збиральної машини, і стадію, на якій збиральну машину автоматично направляють вздовж переважного шляху.
25. Спосіб розділення зібраного продукту для збиральної машини, який включає наступні стадії:
а) стадію, на якій одержують специфічну для ділянки інформацію, яка відноситься до властивостей сільськогосподарської культури, специфічна для ділянки інформація включає інформацію про відмітку висоти лану та багатоспектральне зображення лану;
б) стадію, на якій за специфічною для ділянки інформацією визначають зони властивостей сільськогосподарської культури;
в) стадію, на якій у зонах схожих характеристик ідентифікують місця відбору проб;
г) стадію, на якій у ідентифікованих місцях відбору проб здійснюють відбір проб властивостей, які виключають місця відбору проб у перехідних зонах між різними зонами рівнів властивостей сільськогосподарської культури;
ґ) стадію, на якій формують карту розрахункового рівня властивостей сільськогосподарської культури принаймні для однієї властивості сільськогосподарської культури, використовуючи специфічну для ділянки інформацію й проби властивостей, причому розрахунковий рівень властивостей сільськогосподарської культури включає вміст білка, крохмалю, олії, цукру або рівень вологи сільськогосподарської культури; та
д) стадію, на якій збиральною машиною керують, використовуючи карту властивостей, для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури на основі інформації про відмітку висоти лану та багатоспектрального зображення лану.
26. Спосіб за п. 25, який відрізняється тим, що додатково включає стадії, на яких визначають перехідні площі для властивості сільськогосподарської культури й відбирають проби сільськогосподарської культури зовні перехідних площ, щоб мінімізувати різкі зміни властивості сільськогосподарської культури.
27. Спосіб за п. 26, який відрізняється тим, що стадія, на якій визначають перехідні площі, включає стадію, на якій відділяють пікселі у межах перехідної площі і виключають пікселі з точок відбору проб сільськогосподарської культури.
28. Спосіб за п. 27, який відрізняється тим, що стадія, на якій відділяють пікселі, включає стадію, на якій визначають швидкість зміни зон властивостей у міру руху.
29. Спосіб за п. 26, який включає стадію, на якій ідентифікують пікселі у межах однорідних груп схожих зон.
30. Спосіб за п. 25, який включає стадію, на якій для властивостей розділеної зібраної сільськогосподарської культури визначають середнє значення та (або) дисперсію.
31. Спосіб за п. 25, який відрізняється тим, що стадія, на якій для властивостей розділеної зібраної сільськогосподарської культури визначають середнє значення та (або) дисперсію, включає стадію, на якій використовують пробовідбірник, який розміщують на збиральній машині.
Текст
1. Спосіб керування збиральною машиною для збирання врожаю сільськогосподарської культури на лану, який включає наступні стадії: а) стадію, на якій одержують специфічну для ділянки інформацію, яка включає інформацію про відмітку висоти лану та багатоспектральне зображення лану, причому інформація відноситься до однієї або кількох властивостей сільськогосподарської культури; б) стадію, на якій специфічну для ділянки інформацію вводять у процесор; в) стадію, на якій формують карту розрахункового рівня властивостей сільськогосподарської культури принаймні для однієї властивості сільськогосподарської культури, використовуючи специфічну для ділянки інформацію та проби, взяті у точках відбору проб, які виключають точки відбору проб у перехідних зонах між різними зонами рівнів властивостей сільськогосподарської культури, причому розрахунковий рівень властивостей сільськогосподарської культури включає вміст білка, крохмалю, олії, цукру або рівень вологи сільськогосподарської культури; й г) стадію, на якій під час збирання врожаю карту властивостей використовують для направлення збиральної машини і для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури на основі інформації про відмітку висоти лану та багатоспектрального зображення лану. 2 (19) 1 3 сподарської культури на лану, який включає наступні стадії: а) стадію, на якій одержують специфічну для ділянки інформацію, яка включає інформацію про відмітку висоти лану та багатоспектральне зображення лану; б) стадію, на якій специфічну для ділянки інформацію вводять у процесор; в) стадію, на якій формують карту розрахункового рівня властивостей сільськогосподарської культури принаймні для однієї властивості сільськогосподарської культури, використовуючи специфічну для ділянки інформацію та проби, взяті у точках відбору проб, які виключають точки відбору проб у перехідних зонах між різними зонами рівнів властивостей сільськогосподарської культури, причому розрахунковий рівень властивостей сільськогосподарської культури включає вміст білка, крохмалю, олії, цукру або рівень вологи сільськогосподарської культури; й г) стадію, на якій під час збирання врожаю збиральну машину направляють, використовуючи карту властивостей, для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури на основі інформації про відмітку висоти лану та багатоспектрального зображення лану. 10. Спосіб за п. 9, який відрізняється тим, що стадія, на якій одержують карту властивостей, включає стадію, яка забезпечує дистанційне зображення лану, і стадію, на якій зображення перетворюють у зони зі схожими характеристиками. 11. Спосіб за п. 9, який відрізняється тим, що стадія, на якій одержують специфічну для ділянки інформацію, включає стадію, на якій формують точки відбору проб у межах площі лану, і стадію, на якій аналізують проби із сформованих точок відбору проб, і тим, що результати відбору проб з проаналізованих проб використовують для формування карти властивостей. 12. Спосіб за п. 11, який відрізняється тим, що стадія, на якій формують точки відбору проб, включає стадію, на якій формують точки відбору проб із взагалі однорідної площі лану. 13. Спосіб за п. 10, який відрізняється тим, що включає стадію, на якій в межах площ зон формують точки відбору проб, і стадію, на якій аналізують проби із точок відбору проб, де перехідні зони визначають шляхом розрахунку похилу, який розраховують на основі відношення зміни кількості зон до відстані між зонами. 14. Спосіб за п. 13, який відрізняється тим, що включає стадію, на якій точкам відбору проб надають інформацію про місцезнаходження, одержану за допомогою GPS. 15. Спосіб за п. 9, який відрізняється тим, що включає стадію, на якій, виходячи з карти властивостей, формують переважний шлях збирання врожаю, причому стадія, на якій збиральну машину направляють, включає стадію, на якій збиральну машину направляють вздовж переважного шляху. 92501 4 16. Спосіб за п. 15, який відрізняється тим, що стадія, на якій збиральною машиною керують, включає стадію, на якій збиральну машину направляють автоматично відповідно до переважного шляху. 17. Спосіб за п. 15, який відрізняється тим, що стадія, на якій формують переважний шлях, включає стадію, на якій шлях формують таким чином, щоб мінімізувати як змінність властивостей зібраної сільськогосподарської культури, так й час збирання сільськогосподарської культури. 18. Спосіб за п. 9, який відрізняється тим, що до специфічної для ділянки інформації включають одне або кілька з наступного: попередній врожай сільськогосподарської культури, розрахунковий врожай сільськогосподарської культури й умови навколишнього середовища. 19. Спосіб за п. 9, який відрізняється тим, що як керовану збиральну машину використовують одне або кілька з наступного: комбайн, шпиндельну бавовнозбиральну машину, сінний прес, плодозбиральну машину й фуражну техніку для збирання сільськогосподарських культур. 20. Спосіб розділення зібраного продукту для збиральної машини, який включає наступні стадії: а) стадію, на якій одержують специфічну для ділянки інформацію, яка відноситься до властивостей сільськогосподарської культури, специфічна для ділянки інформація включає інформацію про відмітку висоти лану та багатоспектральне зображення лану; б) стадію, на якій формують карту розрахункового рівня властивостей сільськогосподарської культури принаймні для однієї властивості сільськогосподарської культури, використовуючи специфічну для ділянки інформацію та проби, взяті у точках відбору проб, які виключають точки відбору проб у перехідних зонах між різними зонами рівнів властивостей сільськогосподарської культури, причому розрахунковий рівень властивостей сільськогосподарської культури включає вміст білка, крохмалю, олії, цукру або рівень вологи сільськогосподарської культури; й в) стадію, на якій під час збирання врожаю збиральною машиною керують, використовуючи карту властивостей, для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури, причому стадія, на якій керують, включає стадію, на якій збиральну машину направляють залежно від властивостей сільськогосподарської культури на основі інформації про відмітку висоти лану та багатоспектрального зображення лану. 21. Спосіб за п. 20, який відрізняється тим, що стадія, на якій збиральною машиною керують, включає також стадію, на якій зібраний продукт направляють до вибраної зони зберігання, і тим, що зону зберігання вибирають залежно від розрахункового рівня властивостей сільськогосподарської культури. 22. Спосіб за п. 21, який відрізняється тим, що стадія, на якій зібраний продукт направ 5 92501 6 ляють до вибраної зони зберігання, включає стадію, на якій продукт направляють до одного або кількох з наступного: одне з кількох місць зберігання на збиральній машині; вантажний транспортний засіб, який використовують для перевезення сільськогосподарської культури з лану; одна з двох або більше пресувальних камер; контейнери для продукції на збиральній машині; контейнери для продукції поруч зі збиральною машиною; і пристрій для перевезення вивантаженої сільськогосподарської культури, у який сільськогосподарську культуру відразу вивантажують зі збиральної машини при русі збиральної машини по лану. 23. Спосіб за п. 20, який відрізняється тим, що стадія, на якій збиральною машиною керують, включає стадію, на якій, використовуючи карту властивостей, збиральну машину направляють таким чином, щоб мінімізувати змінність властивостей зібраної сільськогосподарської культури. 24. Спосіб за п. 23, який відрізняється тим, що стадія, на якій збиральну машину направляють, включає стадію, на якій, використовуючи карту властивостей, визначають переважний шлях збиральної машини, і стадію, на якій збиральну машину автоматично направляють вздовж переважного шляху. 25. Спосіб розділення зібраного продукту для збиральної машини, який включає наступні стадії: а) стадію, на якій одержують специфічну для ділянки інформацію, яка відноситься до властивостей сільськогосподарської культури, специфічна для ділянки інформація включає інформацію про відмітку висоти лану та багатоспектральне зображення лану; б) стадію, на якій за специфічною для ділянки інформацією визначають зони властивостей сільськогосподарської культури; в) стадію, на якій у зонах схожих характеристик ідентифікують місця відбору проб; г) стадію, на якій у ідентифікованих місцях відбору проб здійснюють відбір проб властивостей, які виключають місця відбору проб у перехідних зонах між різними зонами рівнів властивостей сільськогосподарської культури; ґ) стадію, на якій формують карту розрахункового рівня властивостей сільськогосподарської культури принаймні для однієї властивості сільськогосподарської культури, використовуючи специфічну для ділянки інформацію й проби властивостей, причому розрахунковий рівень властивостей сільськогосподарської культури включає вміст білка, крохмалю, олії, цукру або рівень вологи сільськогосподарської культури; та д) стадію, на якій збиральною машиною керують, використовуючи карту властивостей, для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури на основі інформації про відмітку висоти лану та багатоспектрального зображення лану. 26. Спосіб за п. 25, який відрізняється тим, що додатково включає стадії, на яких визначають перехідні площі для властивості сільськогосподарської культури й відбирають проби сільськогосподарської культури зовні перехідних площ, щоб мінімізувати різкі зміни властивості сільськогосподарської культури. 27. Спосіб за п. 26, який відрізняється тим, що стадія, на якій визначають перехідні площі, включає стадію, на якій відділяють пікселі у межах перехідної площі і виключають пікселі з точок відбору проб сільськогосподарської культури. 28. Спосіб за п. 27, який відрізняється тим, що стадія, на якій відділяють пікселі, включає стадію, на якій визначають швидкість зміни зон властивостей у міру руху. 29. Спосіб за п. 26, який включає стадію, на якій ідентифікують пікселі у межах однорідних груп схожих зон. 30. Спосіб за п. 25, який включає стадію, на якій для властивостей розділеної зібраної сільськогосподарської культури визначають середнє значення та (або) дисперсію. 31. Спосіб за п. 25, який відрізняється тим, що стадія, на якій для властивостей розділеної зібраної сільськогосподарської культури визначають середнє значення та (або) дисперсію, включає стадію, на якій використовують пробовідбірник, який розміщують на збиральній машині. Галузь винаходу [0001] Винахід відноситься, взагалі, до інтелектуального збирання сільськогосподарських культур і, зокрема, до допомоги у наведенні збиральної машини або схожої сільськогосподарської машини на основі однієї або кількох властивостей сільськогосподарської культури. Передумови винаходу [0002] Більшість нинішніх способів збирання сільськогосподарських культур включає прості стадії проходу за проходом без можливості ефективно розділяти сільськогосподарську культуру відповідно до рівня її властивостей з метою оптимізації потенціальної ринкової ціни й прибутковості. Хоча стають наявними бортові монітори для відбору проб зібраного зерна із разових зразків зерна й оцінки загальних рівнів властивостей зібраної сільськогосподарської культури, більшість з них надають інформацію про розмах або дисперсію по партіях зібраної сільськогосподарської культури у зоні зберігання без розділення сільськогосподарської культури за властивостями. Крім того, системам автоматичного відбору проб зазвичай бракує ефективного способу визначення площ, на яких необхідно відбирати проби. [0003] Здійснені різні спроби розділення сільськогосподарської культури за рівнями властивостей, включаючи використання топології ланів, наприклад, похил, відмітка висоти й контур, для поділу ланів сільськогосподарських культур на 7 зони. Запропоновано поділ ланів сої на площі залежно від вмісту білку. Наприклад, соя, яка росте на буграх, часто дозріває на кілька тижнів раніше за цю культуру на решті лану, тому фермери виходитимуть на лани й вибірково збиратимуть дозрілі соєві боби. Більшість способів розділення сільськогосподарських культур ґрунтуються на візуальному сприйнятті умов лану і сільськогосподарських культур комбайнером або трактористом збиральної машини і суб'єктивній оцінці потенціальної вартості. [0004] Минула оцінка рівня властивості, необхідного при попередньому збиранні врожаю, часто неефективна для визначення зон властивостей нинішньої культури, оскільки є численні змінні, які справляють вплив на властивості сільськогосподарської культури. Досі не існує цілком задовільного способу визначення меж площ з необхідними властивостями й надання інформації ефективним і зручним для користувача шляхом, щоб допомогти комбайнеру або трактористу при збиранні врожаю й розділенні сільськогосподарської культури, або забезпечити вхідні дані до автоматизованої системи наведення збиральної машини з цією метою. [0005] Запропоновані різні способи наведення транспортного засобу, включаючи вибір робочого шляху, виходячи з географічних факторів площі, з якої збирається врожай, з метою зменшити витрати енергії. Такий спосіб відомий, наприклад, із патенту США № 6 728 607. Інші способи планування робочого шляху для таких функцій, як оптимізація маршрутів пересування, мінімізація робочого часу, оптимізація операцій з вивантаження збиральних машин тощо розкриті у патенті США № 6 128 574. Втім ще й досі існує потреба у надійному та зручному для користувача способі формування плану завдання, щоб допомогти у розділенні сільськогосподарських культур за властивістю. [0006] Спосіб розділення сільськогосподарських культур на місці збирання врожаю, який включає стадію, на якій на основі місцезнаходження машини й карти команд щодо збирання врожаю використовують дивертер (відхильник), описаний у патенті США 5 957 304. Такі способи з використанням дивертера зазвичай обмежують відділені партії кількістю зон або бункерів для зберігання, передбачених на збиральній машині. Розділення сільськогосподарської культури за властивостями на кількість партій, яка перевищує кількість зон для зберігання, представляє труднощі. Розділення сільськогосподарських культур на кілька партій або вантажів і забезпечення зручного і надійного показника середнього значення й дисперсії властивостей партії або вантажу зібраної сільськогосподарської культури також продовжують залишатися джерелами труднощів. Найближчими документами рівня техніки є заявка US 2003/0187560, яка розкриває спосіб та пристрій для точних сільськогосподарських операцій з використанням точної кінематичної системи глобального позиціонування (GPS) в реальному масштабі часу; заявка US 2003/0208319, яка розкриває систему та спосіб для створення карт демонстраційного застосування для сільського господарства з використанням специфічної для 92501 8 ділянки інформації; патент US 6529615, який розкриває спосіб визначення та покращення здоров'я сільськогосподарської культури. Однак, в зазначених документах нічого не вказано про використання комбінації інформації про відмітку висоти ґрунту лану та багатоспектрального зображення лану для контролю збиральної машини щодо розділення сільськогосподарських культур - задачі, які успішно вирішує заявлений винахід. Стислий опис винаходу [0007] Отже, метою цього винаходу є створення удосконаленого способу розділення зібраної сільськогосподарської культури за її властивостями. Ще однією метою є створення такого способу, який вирішує більшість або усі з вищезазначених проблем. [0008] Це однією метою винаходу є створення удосконаленого способу встановлення карт властивостей сільськогосподарської культури й використання цих карт для розділення зібраної сільськогосподарської культури за її властивостями. Ще однією метою є створення удосконаленого способу встановлення абсолютних величин для середнього значення й дисперсії для вантажу сільськогосподарської культури, достатньо точного, щоб відповідати принаймні більшості вимог ринку й кінцевих користувачів. [0009] Відповідно до аспектів цього винаходу, для того щоб створити карту розрахункового рівня властивостей сільськогосподарської культури, використовують специфічну для даної ділянки інформацію щодо однієї або кількох властивостей сільськогосподарської культури. Після цього збиральною машиною керують, використовуючи карту властивостей, для розділення зібраної сільськогосподарської культури відповідно до розрахункового рівня властивостей сільськогосподарської культури. В одному варіанті здійснення, виходячи з карти властивостей, створюють переважний шлях керування, і збиральну машину направляють, вручну або автоматично, відповідно до переважного шляху керування. Використання такого підходу з планом завдання сприяє розділенню сільськогосподарської культури на кілька партій або вантажів за її властивістю. У ще одному варіанті здійснення сільськогосподарську культуру можна направляти до однієї з двох або більше зон зберігання, пов'язаних зі збиральною машиною, причому зону зберігання вибирають залежно від розрахункового рівня властивості сільськогосподарської культури. Шляхом використання відхилення у сполученні з планом завдання сільськогосподарську культуру можна поділяти за властивістю на кількість партій або вантажів із кількістю, яка не обмежується кількістю зон зберігання на збиральній машині. [0010] Специфічна для даної ділянки інформація може включати такі відомості, як відмітка висоти, багатоспектральне зображення лану, попередній або розрахунковий врожай сільськогосподарської культури й умови навколишнього середовища. Зони схожих специфічних для ділянки характеристик можна визначати для визначення точок відбору проб у межах взагалі однорідних площ цих зон. Точки відбору проб помічають від 9 повідно до місцезнаходження за даними глобальної системи визначення місцезнаходження (GPS) і використовують як допоміжний матеріал при створенні карт розрахункових властивостей сільськогосподарської культури. Потім ці карти властивостей використовують при плануванні завдання, щоб визначити переважний шлях збирання врожаю, який мінімізує змінність властивостей при збиранні з одночасною мінімізацією часу збирання для необхідного розмаху змінності властивостей сільськогосподарської культури. Для того щоб відповідати потребам ринку й кінцевих користувачів, встановлюють точне середнє значення та (або) дисперсію для розділеної зібраної сільськогосподарської культури. В одному варіанті здійснення для одержання абсолютних значень властивості сільськогосподарської культури і змінності властивості у вантажі зібраної сільськогосподарської культури використовують пробовідбірник, який знаходиться на збиральній машині або у зоні зберігання. [0011] Ці й інші цілі, відмітні ознаки й переваги цього винаходу стануть очевидними з наведеного нижче опису, який ведеться з посиланнями на графічний матеріал. Стислий опис графічного матеріалу [0012] Фіг.1 - це схематичне представлення збиральної машини, оснащеної для збирання сільськогосподарської культури на лані і розділення цієї сільськогосподарської культури за однією або кількома властивостями сільськогосподарської культури. [0013] Фіг.2 представляє собою схематичну ілюстрацію способу формування плану завдання за специфічною для даної ділянки інформації про лан. [0014] Фіг.3 представляє собою карту елементів зображення (пікселів), яка ілюструє перехідні зони між більшими однорідними зонами, які мають схожі зональні характеристики. [0015] Фіг.4 представляє собою блок-схему способу керування збиральною машиною з використанням властивостей сільськогосподарської культури. [0016] Фіг.5 представляє собою схему системи формування плану завдання для збиральної машини з використанням специфічної для даної ділянки інформації для оцінки властивостей сільськогосподарської культури. Докладний опис винаходу [0017] На Фіг.1 показана збиральна машина 10, яка для руху по лану 11 спирається на передні ведучі колеса 12 і задні ведені колеса 14. Розташована спереду конструкція 18 для зрізання сільськогосподарської культури направляє сільськогосподарську культуру до обробного пристрою 20, а потім зібрана сільськогосподарська культура направляється до зони зберігання 22, пов'язаної зі збиральною машиною, такої, як один або кілька бункерів на збиральній машині, та (або) до пристрою або приймача 24 для перевезення сільськогосподарської культури, наприклад, до вантажного автомобіля або причіпного візка, які пересуваються разом зі збиральною машиною або встановлюються поруч із нею. Збиральна машина 10 містить 92501 10 елемент 30 звичайної глобальної системи визначення місцезнаходження (GPS) або іншої звичайної системи визначення місцезнаходження для надання інформації про місцезнаходження збиральної машини. Крім того, як показано, збиральна машина 10 містить систему автоматичного керування 32, яка управляється процесором 34, розташованим у кабіні збиральної машини, у відповідь на різні вхідні сигнали, включаючи сигнали GPS або інші сигнали системи визначення місцезнаходження, сигнали лінії межі сільськогосподарської культури, меж площі тощо. Альтернативно, карта може відображатися у кабіні, й комбайнер або тракторист може вручну керувати збиральною машиною 10 за допомогою цієї карти. Збиральна машина 10 показана - лише для ілюстративних цілей - як комбайн із хедером для збирання зернової культури, такої, як соя, кукурудза або пшениця, але слід розуміти, що цей винахід можна використовувати з багатьма іншими типами збиральних машин, включаючи серед інших бавовнозбиральні, плодозбиральні машини, бавовняні й сінні преси з однією або кількома пресувальними камерами і фуражну техніку для збирання сільськогосподарських культур, які мають змінні властивості. [0018] Лан, з якого необхідно зібрати врожай, ділять на зони зі схожими властивостями сільськогосподарської культури (Фіг.2 й 3). Потім формують карту властивостей, використовуючи один або сполучення звичайних інструментів, таких, як формування багатоспектрального або іншого зображення за допомогою дистанційних датчиків, шари карти відміток висоти, раніше накопичена інформація про ґрунт і сільськогосподарську культуру, одержана за допомогою датчиків ґрунту і сільськогосподарської культури, розрахунковий врожай сільськогосподарської культури та (або) шар карти, одержаний за допомогою наземного транспортного засобу, оснащеного датчиками. [0019] Як показано для прикладу на Фіг.2 й 5, кілька шарів або одержаних за допомогою датчиків зображень, які позначені позицією 40 і включають шари 41, 42 й 43, - це вхідні дані до системи обробки даних 50 (Фіг.5) для формування карти або локатора орієнтованих точок відбору проб 54 у межах відносно великих й взагалі однорідних площ 61, 62, 63 , 64 й 65. Проби з точок 54 аналізують і формують карту 70 розрахункових властивостей сільськогосподарської культури. Потім карту 70 властивостей сільськогосподарської культури використовують для формування плану завдання 72 для розділення зібраної сільськогосподарської культури за її однією або кількома властивостями. Властивістю сільськогосподарської культури може бути, наприклад, вміст білку, крохмалю, олії, цукру, вологість, вміст засвоюваної поживної речовини або будь-яка інша властивість сільськогосподарської культури, що представляє інтерес. Як показано на Фіг.2, план завдання включає збирання окремих вантажів сільськогосподарської культури з окремих площ 72А, 72В, 72С і 72D. Для збирання сільськогосподарської культури рядками план завдання направляє збиральну машину 10 паралельно рядкам на кожній площі. Для збирання сільськогосподарської культури не 11 рядками, наприклад, для збирання пшениці, щоб підвищити ефективність витрати палива, зменшити відстані руху й зменшити кількість розвертань на зональних межах для забезпечення оптимальної продуктивності, можуть формуватися непаралельні шляхи. [0020] На стадії 81 на Фіг.4 одержують шар з високим розділенням, який описує лан. Наприклад, шаром 41 може багатоспектральне зображення, одержане за допомогою дистанційних датчиків, але можна було б використовувати й інші види дистанційних зображень. Альтернативно, цей шар можна було б сформувати за даними, одержаними наземним транспортним засобом, оснащеним датчиками. Зображення багатоспектральної реалізації містить чотири відрізні зображення, кожне з яких представляє різну смугу тієї самої площі. Ці смуги включають зелену, червону, синю й ближню інфрачервону (БІЧ) області спектра. Альтернативно або на додаток, можна використовувати іншу інформацію шару, таку, як відмітка висоти або електропровідність. Після одержання зображення ідентифікують зони, які мають схожі характеристики, у кожному з шарів за допомогою існуючого пакета програм. Для розділення шару 41 на кілька зон програмне забезпечення часто використовує алгоритм кластеризації, відомий як Кзасіб. Альтернативно, окремі смуги зображення можна було б перетворити на деякий показник, такий, як широко використовуваний нормалізований різницевий вегетаційний індекс (NDVI), який можна поділити на кілька зон, які визначають картини росту сільськогосподарської культури, що відрізняються. NDVI розраховують за формулою: NDVI = (БІЧ - червоний)/(БГЧ + червоний), де БІЧ - рівень БІЧ зі смуг зображення, а червоний - рівень червоного. Значення коливаються від -1 до 1, й поділ індексу на зони включає поділ розрахованих значень на області. Наприклад, площі між -1 і -0,9 могли б бути однією зоною, площі між -0,9 і -0,8 могли б бути іншою зоною, площі між -0,8 і -0,7 могли б бути третьою зоною й так далі. [0021] Зони, одержані на стадії 81, вказують, що для цих зон існує відрізнення властивості, яка представляє інтерес, але не надають рівню цієї властивості абсолютного значення. На наступній стадії 82 в межах ідентифікованих зон 61-65 вибирають кілька точок 54, які вказують, де необхідно брати орієнтовані проби сільськогосподарської культури. Як подальше підсилення цієї стадії, ці точки ідентифікують якомога ближче до краю лану, щоб запобігти надмірному пересуванню по лану. Ще одним підсиленням є вибір точок відбору проб 54 таким чином, щоб мінімізувати різкість переходу із зони до зони. Точки відбору проб вибирають таким чином, щоб мінімізувати різкість шляхом відділення пікселів (мінімальних елементів зображення), які знаходяться в межах перехідних зон, визначених шляхом розрахунку похилу зони: похил = зміна зон / зміна відстані, а потім виключають ці пікселі з розгляду як місць відбору проб. На наступній стадії ідентифікують пікселі, які знаходяться в межах однорідних груп 92501 12 схожих класів зон. Одночасно мінімізують відстань місць відбору проб до краю лану. [0022] У деяких випадках будуть два або три стрибки зон між пікселями у перехідних зонах (Фіг.3). Розрахунок похилу, як описано вище, вказує, чи мав місце стрибок великої зони на коротку відстань. Причиною мінімізації різкості переходів є необхідність вибрати зони, які є великими однорідними площами, і запобігти наявності зон шириною лише один або два пікселя. Якщо зона дуже вузька, існує можливість помилки GPS, достатньо великої, що проба відбиратиметься із сусідньої зони, а не з зони, яка представляє інтерес. На Фіг.3 показана площа, поділена на кілька зон 101, 102, 103, 104 й 105, включаючи вузькі перехідні площі 103t і 104t. Проби відбирають у місцях 54' з ширших однорідних площ зон, а не з перехідних площ 103t і 104t. [0023] На третій стадії 83 (Фіг.4) місця точок відбору проб і зафарбовані зони вводять до персонального цифрового асистента, шляхового, планшетного або іншого переносного комп'ютера 106 з функціональними можливостями GPS або здатністю зв'язуватися з приймачем GPS. Консультант 107 використовує цю інформацію для навігації до різних точок, таких, як точки 54, показані на Фіг.2, й у кожній точці одержує пробу сільськогосподарської культури. Консультант 107 ініціює формування номера проби за допомогою кишенькового калькулятора. Номер проби асоціюватиметься з координатами GPS у її поточному місцезнаходженні й пробою, яку взяли у цьому місці. [0024] На стадії 84 проби сільськогосподарської культури, які взяли на стадії 83, аналізують за допомогою звичайних аналітичних інструментів 108 для надання пробам абсолютних значень властивості, яка представляє інтерес. Проби можна відіслати до лабораторії на аналіз й одержання результату тестування, пов'язаного з місцем, з якого вона була взята. Альтернативно, необхідні дані можна одержати за допомогою кишенькового аналітичного пристрою або іншого пристрою, який може працювати на лану під час стадії 83. [0025] Хоча розрахункове середнє значення й дисперсію для вантажу з кожної з площ 72A-72D можна розрахувати по розподілу врожаю, який утворює цей вантаж, така оцінка може виявитися недостатньо точною, щоб задовольнити потреби ринку й вимоги кінцевих користувачів. В іншому варіанті здійснення збиральна машина 10 може містити автоматичний потоковий пробовідбірник зерна 114 у зоні зберігання 22. Зерно вибірково направляють до пристрою для відбору проб, і пробу направляють до контейнера або іншої конструкції 116 зі штрих-кодом для надання абсолютного значення властивості сільськогосподарської культури для цього вантажу та (або) точної оцінки змінності властивості сільськогосподарської культури. Крім того, схожими підходами можна було б користатися для одержання підпроби зерна, яке подають до зони зберігання або випускають із неї, щоб можна було оцінити якість зерна, що перевозиться вантажівками або схожими засобами. БІЧпристрій може забезпечити негайну оцінку, щоб допомогти комбайнерам або трактористам при 13 прийнятті рішень, який пристрій або відділення 24 для перевезення зерна необхідно використати, виходячи з передбачуваних співвідношень між спектральними характеристиками й необхідними властивостями сільськогосподарської культури. Наприклад, сільськогосподарська культура може розділятися за вмістом білку - високим, середнім або низьким. Місця відбору проб під час збирання врожаю можна вибирати вручну або автоматично, керуючись точками 54 на карті на Фіг.2. Крім того, місця відбору проб можуть ґрунтуватися й на показанні датчика БІЧ на збиральній машині 10. [0026] На стадії 85 аналітичні результати 109, одержані на стадії 84, й місця, з яких відповідні проби були взяті, вводять до системи обробки даних, у якій вже зберігають шари інформації для цього лану. Ці дані використовують для формування карти розрахункових властивостей 70 на стадії 85. Виміряні значення властивості асоціюють з основними значеннями пікселів у кожному з шарів. Результуючий графічний масив пікселів оцінюють за допомогою статистичної процедури, такої, як множинна лінійна регресія. Результуюче рівняння регресії потім застосовують до початкового шару або шарів зображення, і розраховують абсолютне значення для усіх пікселів з одержанням у результаті карти розрахункових властивостей з таким самим розділенням, як і початковий шар або шари даних. [0027] Під час стадії 86 карту властивостей, розроблену на стадії 85, використовують для розробки плану завдання, який вказує, як підрозділити лан на площі, відносно однорідні щодо властивості, яка представляє інтерес. Як розроблятиметься план завдання, залежить від сільськогосподарської культури й від того, як збиральна машина пересувається по лану. Якщо сільськогосподарською культурою є пшениця, слідувати необхідно майже будь-яким шляхом. Якщо сільськогосподарською культурою є просапна культура, така, як кукурудза, щоб запобігти втраті зерна, збиральна машина повинна пересуватися у напрямку, паралельному напрямку рядків. План завдання можна вводити в систему автоматичного керування 32, й транспортний засіб сам маневруватиме до різних площ лану. Альтернативно, план завдання може реалізовуватися шляхом відображення карти властивостей у кабіні комбайнера або тракториста і надання йому можливості приймати рішення, як пересуватися. [0028] Планування завдання, описане вище, можна використовувати також у тому випадку, як 92501 14 що зібрана сільськогосподарська культура відразу вивантажується зі збиральної машини. Приклади включають тюки сіна, бавовни або контейнерні системи, та збиральною машиною 10 керують за планом завдання таким чином, щоб мінімізувати змінність у кожному тюку або контейнері. Таке планування завдання для тюків і контейнерів є особливо корисним, якщо тюки або контейнери містять сільськогосподарську культуру з відносно великої площі. Інформацію про положення, де зібрано врожай, і властивості сільськогосподарської культури для тюка або контейнера може надати система радіочастотної ідентифікації або схожа система маркування, але подальше використання плану завдання знижує змінність властивості сільськогосподарської культури для кожного тюку або контейнера. [0029] У ще одному варіанті здійснення сільськогосподарську культуру можуть направляти до одного з двох або більше відділень для зберігання, пов'язаних зі збиральною машиною, причому зону зберігання вибирають залежно від розрахункового рівня властивості сільськогосподарської культури. Наприклад, відділеннями для зберігання можуть бути два або більше бункерів або камер 22а й 22b у зоні зберігання 22 або два або більше приймальних пристроїв 24а й 24b пристрою 24 для перевезення сільськогосподарської культури. Шляхом використання відхилення у сполученні з планом завдання сільськогосподарську культуру можна поділяти за властивістю з меншою дисперсією на кількість партій або вантажів із кількістю, яка не обмежується кількістю зон зберігання на збиральній машині. [0030] Якщо трапляється відносно вузька зона сільськогосподарської культури із властивістю, що відрізняється, така, яка показана як позиція 120 на Фіг.1, дивертер може направляти зібрану сільськогосподарську культуру від цієї зони в один із бункерів 22а й 22b для підтримування необхідного рівня властивості партії в іншому бункері. Таке відхилення призводить до менших переривань шляху у плані завдання для збиральної машини 10 без збільшення варіацій властивостей сільськогосподарської культури у партії зібраної сільськогосподарської культури. [0031] Вище описаний переважний варіант здійснення, але зрозуміло, що можливі інші варіанти у межах обсягу цього винаходу, визначеного доданою формулою винаходу. 15 92501 16 17 92501 18 19 Комп’ютерна верстка Л.Литвиненко 92501 Підписне 20 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling harvester, method for determining way of steered harvester for harvesting crops in field and method for separating product harvested for harvester (variants)
Автори англійськоюHendrikson Larri Lee, Pickett Terence Daniel
Назва патенту російськоюСпособ управления уборочной машиной, способ определения пути управляемой уборочной машины для уборки урожая сельскохозяйственной культуры на поле и способ разделения убранного продукта для уборочной машины (варианты)
Автори російськоюХендриксон Ларри Ли, Пикетт Теренс Дэниэл
МПК / Мітки
МПК: A01B 69/00
Мітки: керування, зібраного, збиральною, керованої, спосіб, визначення, збирання, шляху, машиною, збиральної, культури, машини, врожаю, лану, продукту, розділення, сільськогосподарсько
Код посилання
<a href="https://ua.patents.su/10-92501-sposib-keruvannya-zbiralnoyu-mashinoyu-sposib-viznachennya-shlyakhu-kerovano-zbiralno-mashini-dlya-zbirannya-vrozhayu-silskogospodarsko-kulturi-na-lanu-ta-sposib-rozdilennya-zibran.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування збиральною машиною, спосіб визначення шляху керованої збиральної машини для збирання врожаю сільськогосподарської культури на лану та спосіб розділення зібраного продукту для збиральної машини</a>
Пристрій для керування самохідною збиральною машиною
Номер патенту: 30679
Опубліковано: 15.12.2000
Автори: Бучковський Петро Андрійович, Калайджан Олександр Самвелович, Кондрачук Петро Іванович, Безпальок Андрій Петрович, Мартиненко Володимир Якимович, Маланчин Анатолій Миколайович, Пісний Микола Олексійович
МПК: A01B 69/00
Мітки: машиною, самохідною, пристрій, збиральною, керування
Формула / Реферат:
1. Пристрій для керування самохідною збиральною машиною, який включає гідромеханічну систему відстежування з копіруючими щупами, гідроциліндр повороту напрямних коліс і механізм ручного керування, оснащений коригувальним гідроциліндром, гідросистему з гідроциліндрами для переводу копіруючих щупів і робочих органів машини з робочого в транспортне положення, який відрізняється тим, що напірна магістраль золотника з'єднана запірним пристроєм з...
Пристрій для вимірювання шляху мобільної сільськогосподарської машини
Номер патенту: 17381
Опубліковано: 15.04.1997
Автори: Кінкер Михайло Григорович, Татаров Анатолій Васильович, Носов Григорій Романович
МПК: G01C 22/00
Мітки: машини, мобільної, вимірювання, сільськогосподарсько, шляху, пристрій
Формула / Реферат:
1. Пристрій для вимірювання шляху мобільної сільськогосподарської машини, вміщуючий лічильний вузол та встановлене на вісі шляховимірювальне колесо з грунтозачіплювачами у вигляді замкненої пружини розтягнення, контактуючої з конечними поверхнями дисків, розі ще ними з можливістю переміщення одного із них відносно другого вздовж вісі обертання з фіксацією їх положення, який відрізняється тим, що лічильний вузол виконаний в вигляді...
Вивантажувальний трубопровід сільськогосподарської збиральної машини

Номер патенту: 5848
Опубліковано: 29.12.1994
Автор: Крячко Юрій Григорович
МПК: A01D 43/00, A01D 61/00
Мітки: машини, трубопровід, сільськогосподарсько, збиральної, вивантажувальний
Формула / Реферат:
1. Выгрузной трубопровод сельскохозяйственной уборочной машины, включающий шарнирно соединенные неподвижную и откидную секции, фиксатор в виде качающегося рычага, отличающийся тем, что, с целью повышения надежности фиксации, снижения требований к точности изготовления, зев фиксатора выполнен в виде клинового выреза, а отверстие для установки фиксатора на ось качания выполнено продолговатым. 2. Трубопровод по п.1, отличающийся тем,...
Апарат для розбризкування фуражних добавок на зібрані сільськогосподарські культури та спосіб обробки зібраної сільськогосподарської зернової культури фуражною добавкою
Номер патенту: 78995
Опубліковано: 10.05.2007
Автори: Лебеда Джозеф, Кляйнманс Якоб, Осппінг Джеймс, Оетжен Габі, Русер Барбара, Оетжен Ральф, Допп Зігфрід
МПК: B05B 17/04, B05B 7/24, A01D 43/00
Мітки: апарат, добавкою, зібрані, обробки, спосіб, сільськогосподарські, сільськогосподарсько, зібраної, фуражних, розбризкування, фуражною, добавок, культури, зернової
Формула / Реферат:
1. Апарат для розбризкування фуражних добавок на зібрані сільськогосподарські культури, який має у своєму складі:(a) контейнер концентрованої фуражної добавки, утвореної із поєднання водорозчинної фуражної добавки і води;(b) дозуючий добавку насос у рідинній комунікації із контейнером добавки;(c) сопло дрібнокрапельного розбризкування, розміщене у безпосередній близькості від зібраних зернових культур і у рідинній...
Пристрій для виявлення сторонніх тіл в матеріалі, що збирається сільськогосподарською збиральною машиною
Номер патенту: 39401
Опубліковано: 25.02.2009
Автори: Лозін Андрій Афонійович, Биков Олександр Болеславович
МПК: A01D 75/00
Мітки: сторонніх, пристрій, збиральною, виявлення, сільськогосподарською, машиною, матеріали, збирається, тіл
Формула / Реферат:
Пристрій для виявлення сторонніх тіл у матеріалі, що збирається сільськогосподарською збиральною машиною, який містить металодетектор, що включає датчик металевих предметів і блок збору та оброблення даних, датчик механічної реакції від матеріалу, що включає акселерометр, який з'єднаний з ущільнюючим елементом, що обертається, транспортуючого вузла сільськогосподарської збиральної машини, причому акселерометр установлений з можливістю...
Попередній патент: Ціанопіролсульфонамідні модулятори прогестеронового рецептора та їх застосування
Наступний патент: Спосіб діагностики ураження кишечнику при підпечінковій формі портальної гіпертензії у дітей
Випадковий патент: Спосіб прогнозування результатів лікування переломів довгих кісток у хворих на цукровий діабет