Спосіб і пристрій для передачі даних в системі зв’язку


Формула / Реферат
1. Спосіб передачі даних, який містить етапи, на яких передають первинний пілот-канал, що взаємодіє з каналом даних, при цьому рівень потужності первинного пілот-каналу підтримують незалежним від щонайменше одного з швидкості передачі даних і розміру корисного навантаження для даних, які передаються, на каналі даних, передають вторинний пілот-канал, що взаємодіє з каналом даних, при цьому рівень потужності вторинного пілот-каналу регулюють на основі щонайменше одного зі швидкості передачі даних і розміру корисного навантаження каналу даних, і передають дані по вказаному каналу даних.
2. Спосіб за п. 1, який також містить етапи, на яких приймають первинний, вторинний пілот-канали і канали даних, декодують дані на прийнятому каналі даних на основі інформації каналу, визначеної з прийнятих первинного і вторинного пілот-каналів.
3. Спосіб за п. 1, який також містить етапи, на яких визначають щонайменше одне зі швидкості передачі даних для даних, які передаються, і розміру корисного навантаження для даних, які передаються, на каналі даних, визначають відношення рівнів потужності передачі первинного і вторинного пілот-каналів на основі щонайменше одного з визначених швидкості передачі даних і розміру корисного навантаження.
4. Пристрій для передачі даних, який містить передавач, сконфігурований для передачі первинного пілот-каналу, що взаємодіє з каналом даних, вторинного пілот-каналу, що взаємодіє з вказаним каналом даних, і дані на каналі даних, і процесор керування потужністю, сконфігурований для підтримки рівня потужності первинного пілот-каналу незалежним від щонайменше одного зі швидкості передачі даних і розміру корисного навантаження для даних, які передаються, на вказаному каналі даних, і для регулювання рівня потужності вторинного пілот-каналу на основі щонайменше одного з визначених швидкості передачі даних і розміру корисного навантаження даних, які передаються, на каналі даних.
5. Пристрій за п. 4, який також містить контролер для визначення щонайменше одного з визначеної швидкості передачі даних і визначеного розміру корисного навантаження для даних, які передаються, на каналі даних і для визначення відношення рівнів потужності передачі первинного і вторинного пілот-каналів на основі щонайменше одного з визначених швидкості передачі даних і розміру корисного навантаження.
6. Спосіб для системи зв'язку, який містить етапи, на яких визначають щонайменше одне зі швидкості передачі даних і розміру корисного навантаження каналу даних при передачі по зворотній лінії зв'язку, порівнюють щонайменше одне з визначених швидкості передачі даних і розміру корисного навантаження із заздалегідь визначеним значенням, і визначають, чи необхідно передавати обидва первинний пілот-канал і вторинний пілот-канал, на основі вказаного порівняння.
7. Спосіб за п. 6, який також містить етап, на якому визначають відношення рівнів потужності первинного і вторинного пілот-каналів на основі щонайменше одного з визначених швидкості передачі даних і розміру корисного навантаження.
8. Спосіб за п. 6, який також містить етап, на якому підтримують рівень потужності первинного пілот-каналу незалежним від щонайменше одного зі швидкості передачі даних і розміру корисного навантаження каналу даних.
9. Пристрій для системи зв'язку, який містить контролер, сконфігурований з можливістю визначати щонайменше одне зі швидкості передачі даних і розміру корисного навантаження каналу даних при передачі по зворотній лінії зв'язку; порівнювати щонайменше одне з визначених швидкості передачі даних і розміру корисного навантаження із заздалегідь визначеним значенням, і визначати, чи необхідно передавати обидва первинний пілот-канал і вторинний пілот-канал, на основі вказаного порівняння.
10. Пристрій за п. 9, в якому контролер також виконаний з можливістю визначати відношення рівнів потужності первинного і вторинного пілот-каналів на основі щонайменше одного з визначених швидкості передачі даних і розміру корисного навантаження.
11. Пристрій за п. 9, в якому контролер також виконаний з можливістю підтримувати рівень потужності первинного пілот-каналу незалежним від щонайменше одного зі швидкості передачі даних і розміру корисного навантаження каналу даних.
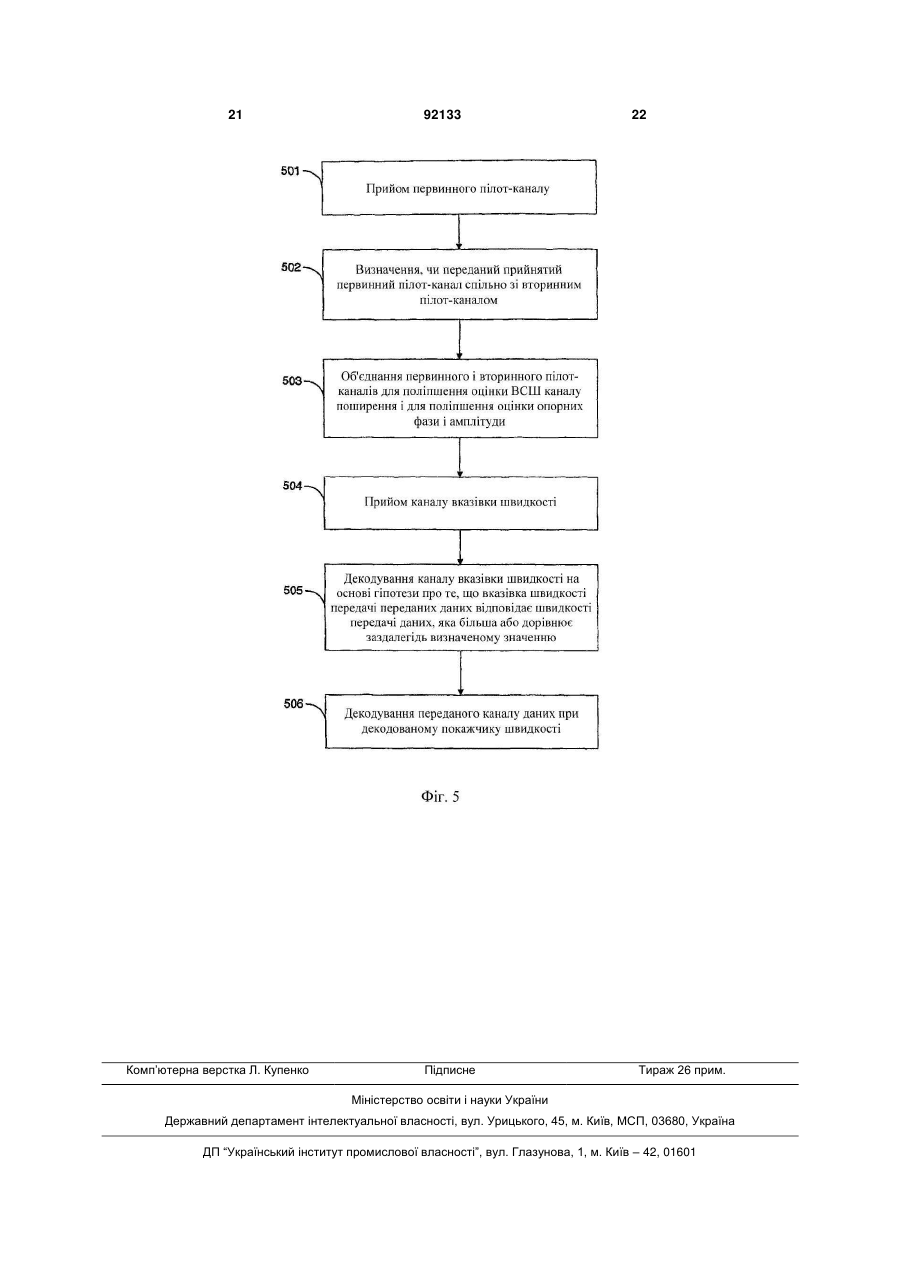
12. Спосіб для системи зв'язку, який містить етапи, на яких приймають первинний пілот-канал, вторинний пілот-канал і канал даних, причому первинний і вторинний пілот-канали взаємодіють з каналом даних, рівень потужності первинного пілот-каналу є незалежним від щонайменше одного зі швидкості передачі даних і розміру корисного навантаження для даних, які передаються, на вказаному каналі даних, і рівень потужності вторинного пілот-каналу оснований щонайменше на одному зі швидкості передачі даних і розміру корисного навантаження каналу даних, і декодують прийнятий канал даних на основі інформації каналу, визначеної з вказаних прийнятих первинного і вторинного пілот-каналів.
13. Спосіб за п. 12, який також містить етап, на якому використовують відношення прийнятого сигналу до шуму на вторинному пілот-каналі для процесу керування потужністю між приймальним кінцем і передавальним кінцем, що відповідно приймає і передає первинний пілот-канал, вторинний пілот-канал і канал даних.
14. Спосіб за п. 12, який також містить етап, на якому декодують канал вказівки швидкості, який вказує щонайменше одне з розміру корисного навантаження і швидкості передачі даних каналу даних, прийнятий від передавального кінця, що передає первинний пілот-канал, вторинний пілот-канал і канал даних, на основі щонайменше одного з прийнятого рівня потужності вторинного пілот-каналу і відношення прийнятих рівнів потужності первинного і вторинного пілот-каналів.
15. Пристрій для системи зв'язку, який містить приймач для прийому первинного пілот-каналу, вторинного пілот-каналу і каналу даних, при цьому первинний і вторинний пілот-канали взаємодіють з вказаним каналом даних, рівень потужності первинного пілот-каналу є незалежним від щонайменше одного зі швидкості передачі даних і розміру корисного навантаження для даних, які передаються, на вказаному каналі даних, і рівень потужності вторинного пілот-каналу оснований щонайменше на одному зі швидкості передачі даних і розміру корисного навантаження каналу даних, і декодер для декодування вказаних даних на вказаному прийнятому каналі даних на основі інформації каналу, визначеної з прийнятих первинного і вторинного пілот-каналів.
16. Пристрій за п. 15, який також містить процесор керування потужністю, виконаний з можливістю використовувати відношення прийнятого сигналу до шуму на вторинному пілот-каналі для процесу керування потужністю між приймальним кінцем і передавальним кінцем, що відповідно приймає і передає первинний пілот-канал, вторинний пілот-канал і канал даних.
17. Пристрій за п. 15, в якому декодер також виконаний з можливістю декодувати канал вказівки швидкості, який вказує щонайменше одне з розміру корисного навантаження і швидкості передачі даних каналу даних, прийнятий від передавального кінця, що передає первинний пілот-канал, вторинний пілот-канал і канал даних, на основі щонайменше одного з прийнятого рівня потужності вторинного пілот-каналу і відношення прийнятих рівнів потужності первинного і вторинного пілот-каналів.
Текст
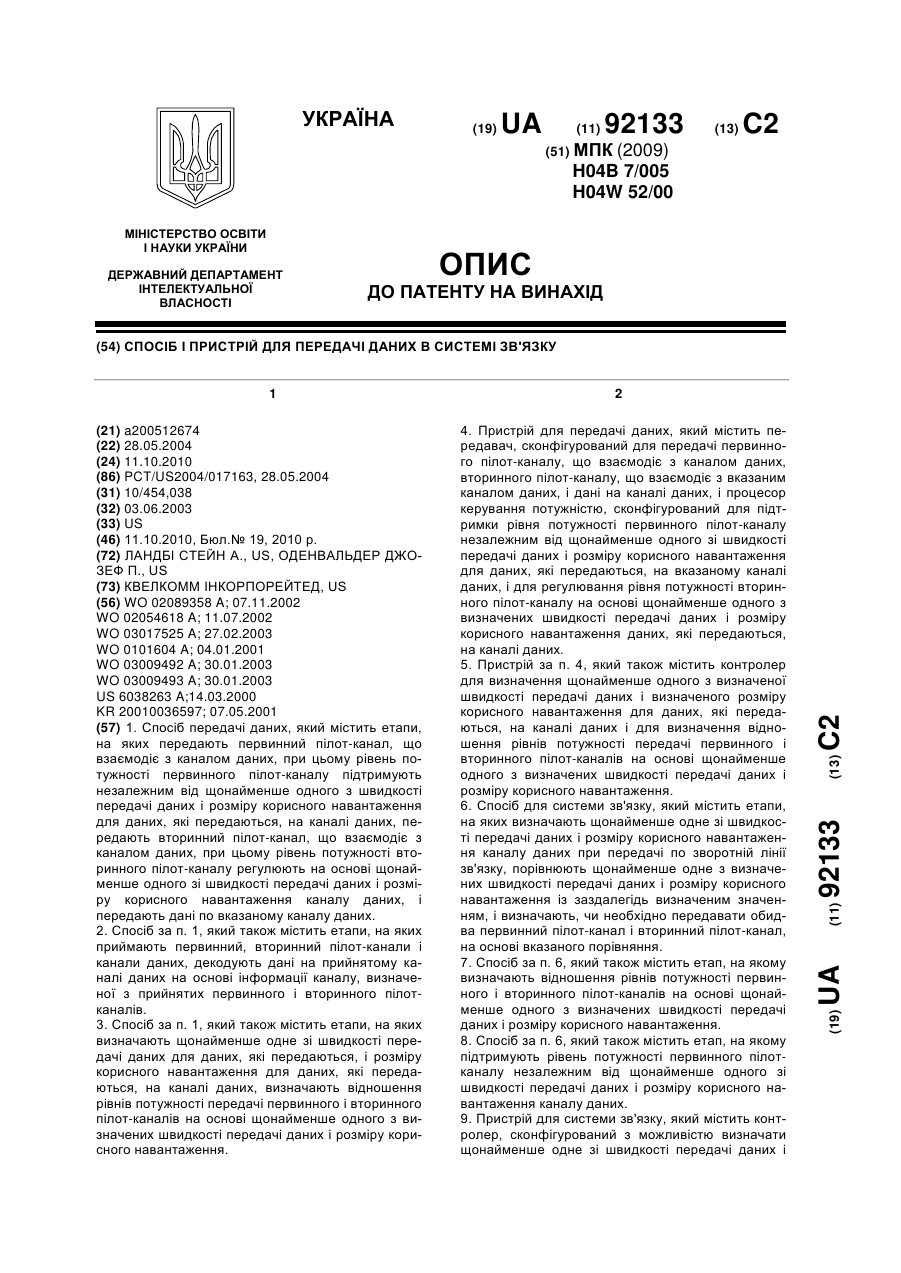
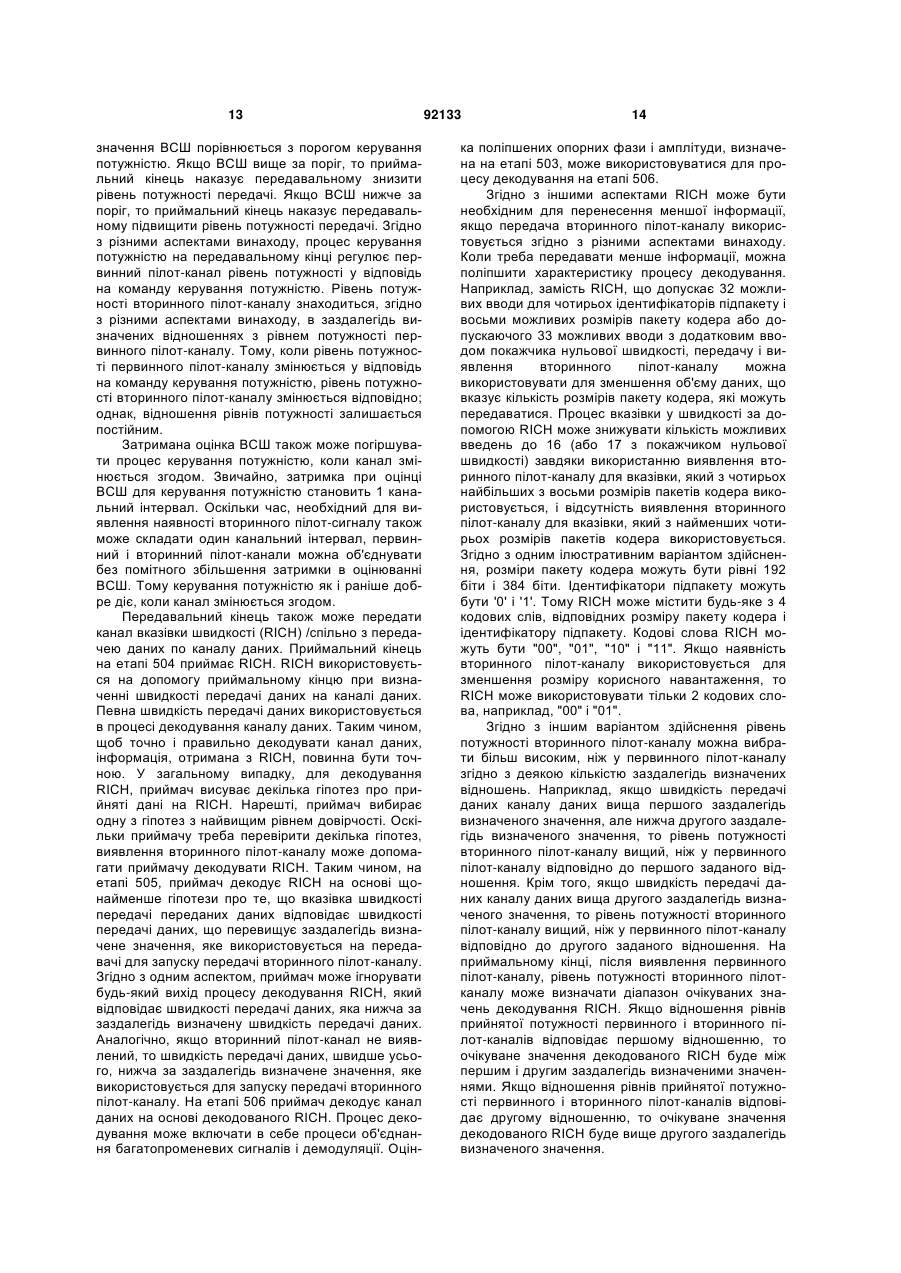
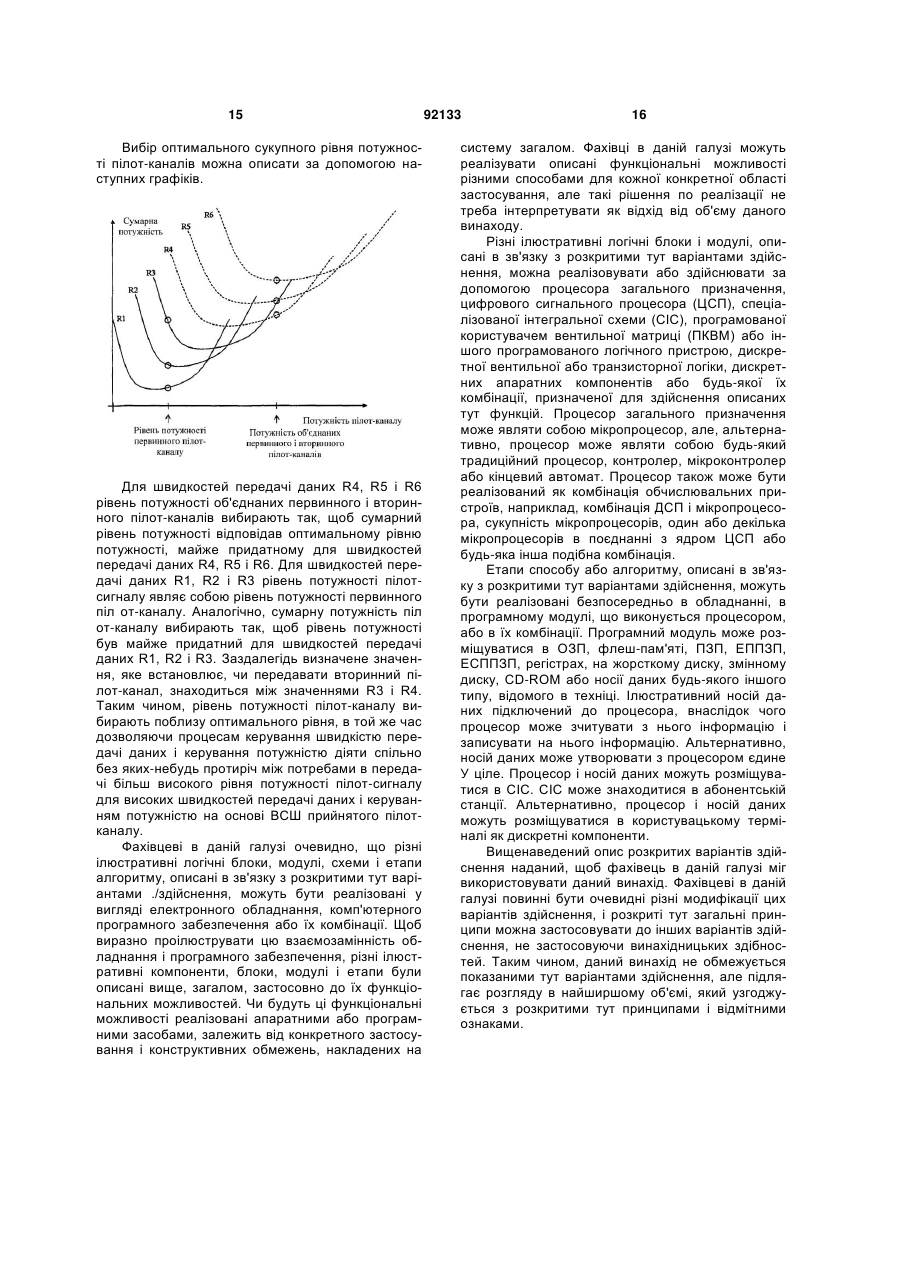
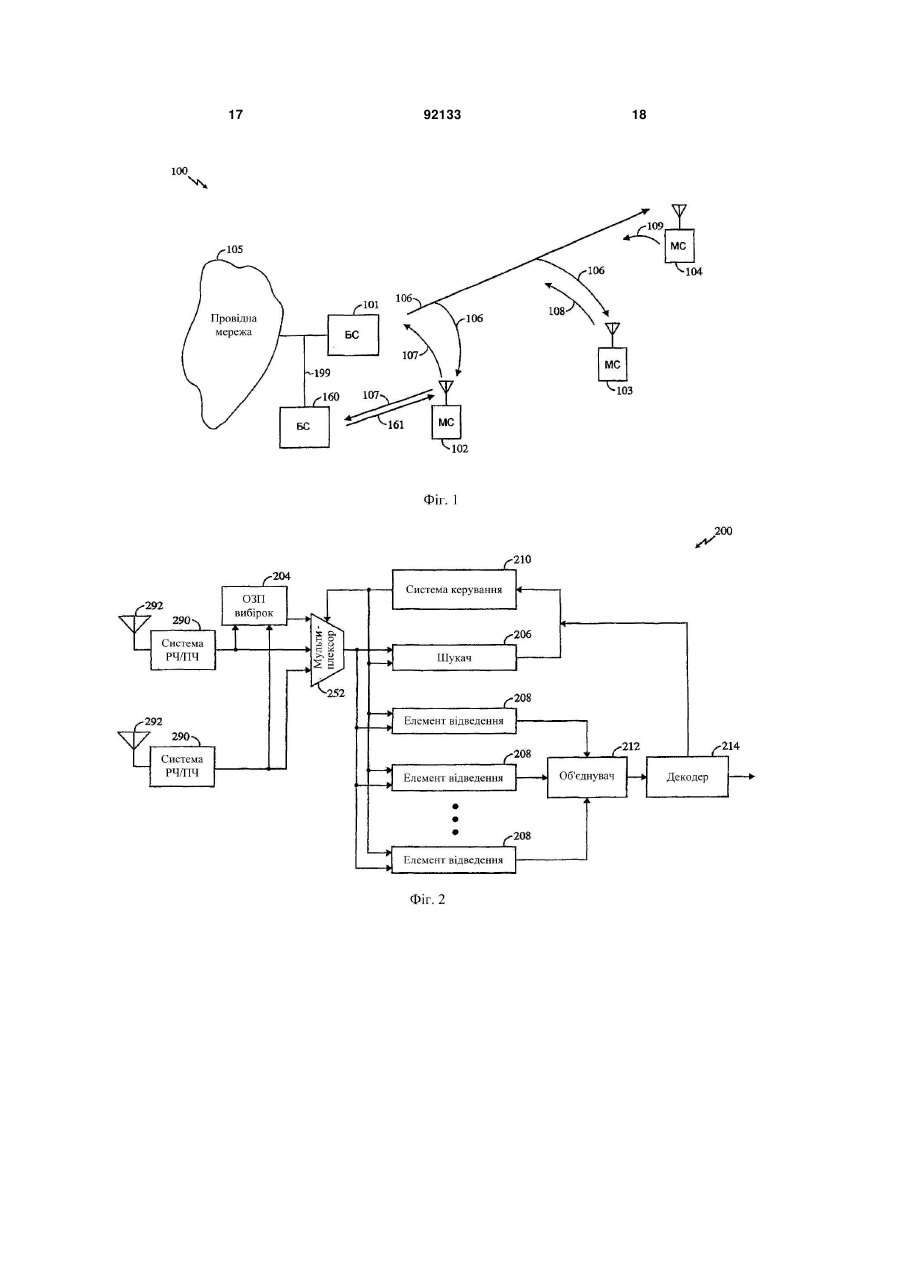
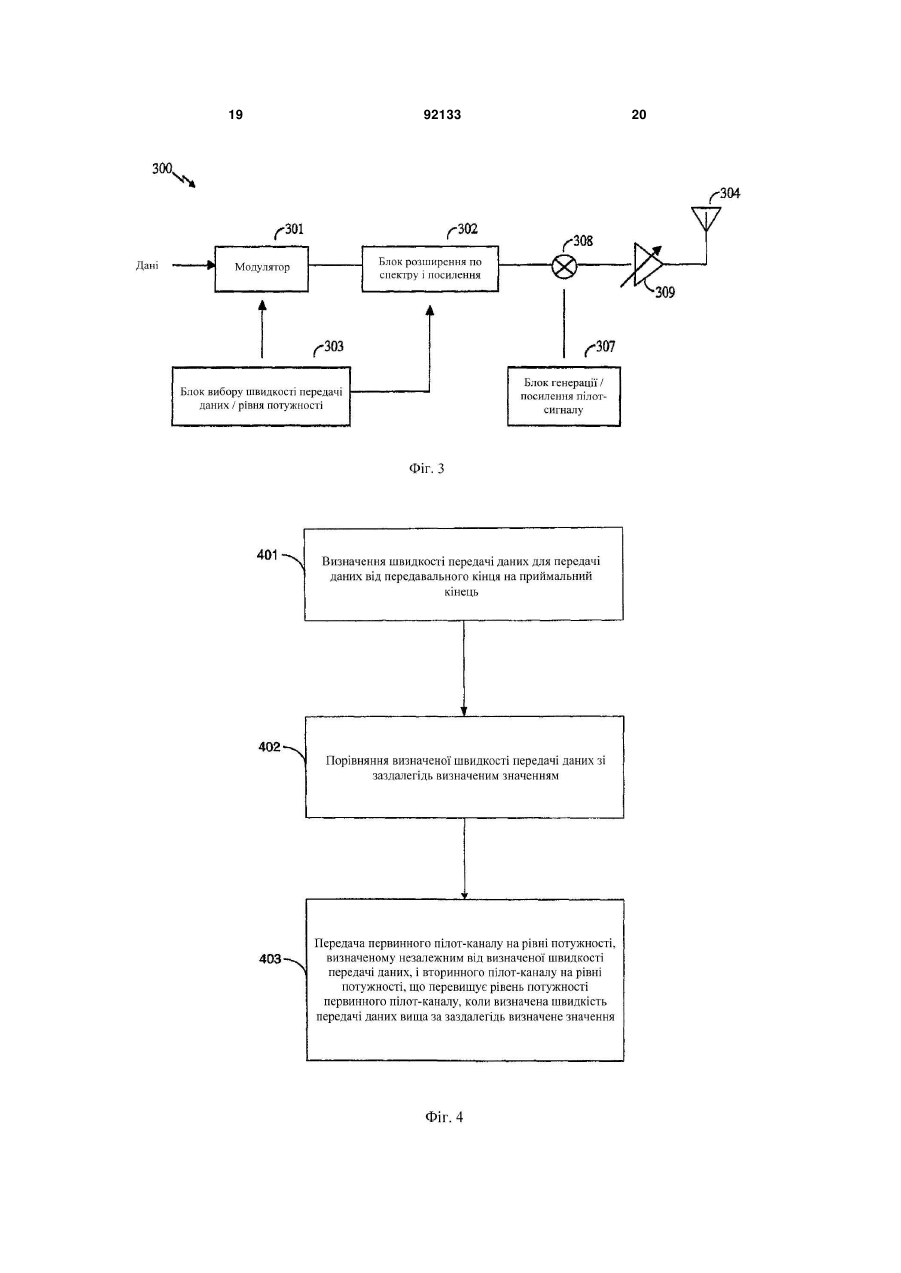
1. Спосіб передачі даних, який містить етапи, на яких передають первинний пілот-канал, що взаємодіє з каналом даних, при цьому рівень потужності первинного пілот-каналу підтримують незалежним від щонайменше одного з швидкості передачі даних і розміру корисного навантаження для даних, які передаються, на каналі даних, передають вторинний пілот-канал, що взаємодіє з каналом даних, при цьому рівень потужності вторинного пілот-каналу регулюють на основі щонайменше одного зі швидкості передачі даних і розміру корисного навантаження каналу даних, і передають дані по вказаному каналу даних. 2. Спосіб за п. 1, який також містить етапи, на яких приймають первинний, вторинний пілот-канали і канали даних, декодують дані на прийнятому каналі даних на основі інформації каналу, визначеної з прийнятих первинного і вторинного пілотканалів. 3. Спосіб за п. 1, який також містить етапи, на яких визначають щонайменше одне зі швидкості передачі даних для даних, які передаються, і розміру корисного навантаження для даних, які передаються, на каналі даних, визначають відношення рівнів потужності передачі первинного і вторинного пілот-каналів на основі щонайменше одного з визначених швидкості передачі даних і розміру корисного навантаження. 2 (19) 1 3 92133 4 розміру корисного навантаження каналу даних при передачі по зворотній лінії зв'язку; порівнювати щонайменше одне з визначених швидкості передачі даних і розміру корисного навантаження із заздалегідь визначеним значенням, і визначати, чи необхідно передавати обидва первинний пілотканал і вторинний пілот-канал, на основі вказаного порівняння. 10. Пристрій за п. 9, в якому контролер також виконаний з можливістю визначати відношення рівнів потужності первинного і вторинного пілотканалів на основі щонайменше одного з визначених швидкості передачі даних і розміру корисного навантаження. 11. Пристрій за п. 9, в якому контролер також виконаний з можливістю підтримувати рівень потужності первинного пілот-каналу незалежним від щонайменше одного зі швидкості передачі даних і розміру корисного навантаження каналу даних. 12. Спосіб для системи зв'язку, який містить етапи, на яких приймають первинний пілот-канал, вторинний пілот-канал і канал даних, причому первинний і вторинний пілот-канали взаємодіють з каналом даних, рівень потужності первинного пілот-каналу є незалежним від щонайменше одного зі швидкості передачі даних і розміру корисного навантаження для даних, які передаються, на вказаному каналі даних, і рівень потужності вторинного пілот-каналу оснований щонайменше на одному зі швидкості передачі даних і розміру корисного навантаження каналу даних, і декодують прийнятий канал даних на основі інформації каналу, визначеної з вказаних прийнятих первинного і вторинного пілот-каналів. 13. Спосіб за п. 12, який також містить етап, на якому використовують відношення прийнятого сигналу до шуму на вторинному пілот-каналі для процесу керування потужністю між приймальним кінцем і передавальним кінцем, що відповідно приймає і передає первинний пілот-канал, вторинний пілот-канал і канал даних. 14. Спосіб за п. 12, який також містить етап, на якому декодують канал вказівки швидкості, який вказує щонайменше одне з розміру корисного навантаження і швидкості передачі даних каналу даних, прийнятий від передавального кінця, що передає первинний пілот-канал, вторинний пілотканал і канал даних, на основі щонайменше одного з прийнятого рівня потужності вторинного пілотканалу і відношення прийнятих рівнів потужності первинного і вторинного пілот-каналів. 15. Пристрій для системи зв'язку, який містить приймач для прийому первинного пілот-каналу, вторинного пілот-каналу і каналу даних, при цьому первинний і вторинний пілот-канали взаємодіють з вказаним каналом даних, рівень потужності первинного пілот-каналу є незалежним від щонайменше одного зі швидкості передачі даних і розміру корисного навантаження для даних, які передаються, на вказаному каналі даних, і рівень потужності вторинного пілот-каналу оснований щонайменше на одному зі швидкості передачі даних і розміру корисного навантаження каналу даних, і декодер для декодування вказаних даних на вказаному прийнятому каналі даних на основі інформації каналу, визначеної з прийнятих первинного і вторинного пілот-каналів. 16. Пристрій за п. 15, який також містить процесор керування потужністю, виконаний з можливістю використовувати відношення прийнятого сигналу до шуму на вторинному пілот-каналі для процесу керування потужністю між приймальним кінцем і передавальним кінцем, що відповідно приймає і передає первинний пілот-канал, вторинний пілотканал і канал даних. 17. Пристрій за п. 15, в якому декодер також виконаний з можливістю декодувати канал вказівки швидкості, який вказує щонайменше одне з розміру корисного навантаження і швидкості передачі даних каналу даних, прийнятий від передавального кінця, що передає первинний пілот-канал, вторинний пілот-канал і канал даних, на основі щонайменше одного з прийнятого рівня потужності вторинного пілот-каналу і відношення прийнятих рівнів потужності первинного і вторинного пілотканалів. Даний винахід стосується, загалом галузі зв'язку і, зокрема, передач по зворотній лінії зв'язку в системі зв'язку. Для здійснення передачі по зворотній лінії зв'язку може бути потрібна передача пілот-сигналу від мобільних станцій, щоб приймач на базовій станції міг когерентно здійснювати об'єднання і демодуляцію багатопроменевих сигналів. У загальному випадку, для знаходження оптимального рівня потужності для сумарного рівня потужності передачі пілот-каналу і каналів даних, рівень потужності для пілот-каналу мінімізують, намагаючись в той же час досягти характеристики частоти помилки декодування. Наприклад, в системі, загальновідомій як cdma2000 1х, для формату 9600 біт/с при частоті кадрової помилки (FER) 1%, експериментально виявлено, що оптимальний рівень потужності пілот-каналу приблизно на 3,75 дБ нижчий за рівень потужності каналів даних. Якщо рівень потужності пілот-каналу стає значно вищий заданого рівня, то загальна характеристика декодування не отримує значного поліпшення, незважаючи на збільшення сумарної потужності передачі пілот-каналу і каналів даних. Якщо ж рівень потужності пілот-каналу стає значно нижчий заданого рівня, то рівень потужності каналів даних необхідно збільшити, щоб досягти тієї ж самої характеристики частоти помилки декодування. У цьому випадку, сумарний рівень потужності пілот-каналу і каналів даних також підвищується. Тому, є оптимальний рівень потужності пілот-каналу по відношенню до рівня потужності каналу даних для швидкості передачі даних при здійсненні зв'язку на рівні характеристики частоти помилки декодування. Наступний графік ілюструє оптимальний рівень потужності пілот-каналу, що використовується для передачі пілот-каналу і каналів даних. 5 Оптимальний рівень потужності пілот-сигналу може бути різним для різних швидкостей передачі даних. Передачі на більш високих швидкостях передачі даних мають оптимальний рівень пілотсигналу, який може бути значно вищим, ніж рівень пілот-сигналу, необхідний для низьких швидкостей передачі даних. Різниця між оптимальними рівнями пілот-сигналу для низької і високої швидкостей передачі даних може складати близько 13 дБ. Рівень потужності пілот-каналу також вимірюється приймачем в процесі керування потужністю для керування рівнем потужності передачі. Звичайно приймач вимірює відношення сигнал/шум (ВСШ) пілот-каналу. Виміряне ВСШ порівнюється з порогом. Якщо виміряне ВСШ вище за поріг, то приймач, за допомогою свого допоміжного передавача наказує джерелу передачі знизити потужність пілот-каналу. Рівень потужності каналу даних також знижується для підтримки відношення рівнів потужності пілот-каналу і каналу даних. Якщо виміряне ВСШ нижче за поріг, то приймач за допомогою свого допоміжного передавача наказує джерелу передачі підвищити потужність пілот-каналу. Рівень потужності каналу даних також підвищується для підтримки відношення рівнів потужності пілот-каналу і каналу даних. Таким чином, приймальний кінець за допомогою процесу керування потужністю намагається підтримувати ВСШ пілотсигналу на приймачі для правильного процесу декодування з мінімальною частотою помилок. Система зв'язку також має процес керування швидкістю передачі даних, який намагається максимізувати швидкість передачі даних при передачі для оптимізації пропускної здатності. На основі виміряних характеристик каналу швидкість передачі даних можна підвищувати або знижувати. Згідно з іншим аспектом, швидкість передачі даних може змінюватися на вимогу, при умові, що характеристики каналу допускають правильні передачі на запитуваній швидкості передачі даних. У такій системі зв'язку керування потужністю пілот-каналу і керування швидкістю передачі даних можуть здійснюватися незалежно. Таким чином, коли швидкість передачі даних змінюється, рівень потужності пілот-каналу також може змінюватися, без участі процесу керування потужністю, для підтримки оптимального рівня потужності пілот-каналу. Оскільки процес керування потужністю не має інформації про зміну швидкості передачі даних і відповідну зміну потужності пілот-каналу, 92133 6 процес керування потужністю може прийняти зміну потужності пілот-каналу за зміну умов поширення на каналі. Таке визначення звичайно ініціює процес зміни потужності пілот-каналу за допомогою процесу керування потужністю. Тому, якщо зміна рівня потужності пілот-каналу відповідно до передачі на іншій швидкості передачі даних здійснюється без попереднього сповіщення приймального кінця, то процес керування потужністю може помилково наказати пілоту-каналу відрегулювати його потужність передачі. Тому необхідно, щоб процес керування потужністю і процес керування швидкістю передачі даних здійснювалися одночасно в системі зв'язку без яких-небудь несприятливих наслідків. Ознаки, задачі і переваги даного винаходу виявляються з нижченаведеного докладного опису, приведеного спільно з кресленнями, забезпеченими крізною системою позначень, в яких: Фіг.1 - система зв'язку для передачі і прийому даних згідно з різними аспектами винаходу; Фіг.2 - система приймача для прийому даних згідно з різними аспектами винаходу; Фіг.3 - система передавача для передачі даних згідно з різними аспектами винаходу; Фіг.4 - логічна блок-схема одного або декількох етапів на передавальному кінці згідно з різними аспектами винаходу; Фіг.5 - логічна блок-схема одного або декількох етапів на приймальному кінці згідно з різними аспектами винаходу. Спосіб і пристрій забезпечують ефективні процеси керування швидкістю передачі даних і керування потужністю за рахунок передачі первинного і вторинного пілот-каналів, зв'язаних з каналом даних. Первинний і вторинний пілотканали використовуються для декодування даних. Відношення рівнів потужності первинного і вторинного пілот-каналів залежить від щонайменше одного з швидкості передачі даних і розміру корисного навантаження каналу даних. Рівень потужності первинного пілот-каналу підтримується незалежним від щонайменше одного з швидкості передачі даних і розміру корисного навантаження каналу даних. Рівень потужності вторинного пілот-каналу можна регулювати на основі щонайменше одного з швидкості передачі даних і розміру корисного навантаження каналу даних. Один або декілька ілюстративних варіантів здійснення описані тут застосовно до системи цифрового безпровідного зв'язку. Хоч використання в цьому контексті є переважним, інші варіанти здійснення винаходу можуть застосовуватися до інших середовищ або конфігурацій. У загальному випадку, описані тут різні системи можуть бути сформовані з використанням процесорів з програмним керуванням, інтегральних схем або дискретної логіки. Дані, інструкції, команди, інформація, сигнали, біти, символи і елементи даних, згадані в заявці, представлені напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками або будь-якою їх комбінацією. Крім того, блоки, показані в кожній блок-схемі, можуть представляти обладнання або етапи способу. 7 Зокрема, різні варіанти здійснення винаходу можуть застосовуватися в системі безпровідного зв'язку, яка діє згідно з методом множинного доступу з кодовим розділенням (МДКР), який розкритий і описаний в різних стандартах, опублікованих Асоціацією виробників засобів зв'язку (ТІА) і іншими органами стандартизації. Такі стандарти включають в себе стандарт ТІА/ЕІА-95, стандарт TIA/EIA-IS-2000, стандарт ІМТ-2000, стандарт UMTS і WCDMA, які всі включені сюди за допомогою посилання. Система для передачі даних також детально описана в "TIA/EIA/IS-856 cdma2000 High Rate Packet Data Air Interface Specification", включеному сюди за допомогою посилання. Копію стандартів можна отримати, звернувшись до веб-сайту за адресою: http://www.3gpp2.org, або написавши за адресою: ТІА, Standards and Technology Department, 2500 Wilson Boulevard, Arlington, VA 22201, United States of America. Стандарт, який звичайно називається стандартом UMTS, включений сюди за допомогою посилання, можна отримати, написавши за адресою: 3GPP Support Office, 650 Route des LuciolesSophia Antipolis, Valbonne-France. На Фіг.1 показана узагальнена блок-схема системи 100 зв'язку, яка здатна працювати згідно з одним з стандартів системи зв'язку множинного доступу з кодовим розділенням (МДКР), із застосуванням різних варіантів здійснення винаходу. Система 100 зв'язку дозволяє передавати мову, дані або і те, і інше. У загальному випадку, система 100 зв'язку включає в себе базову станцію 101, яка забезпечує лінії зв'язку між декількома мобільними станціями, наприклад, мобільними станціями 102-104, і між мобільними станціями 102-104 і мережею 105 телефонії і передачі даних загального користування. Мобільні станції, показані на Фіг.1, можуть називатися терміналами доступу для передачі даних (ТД), а базова станція - мережею доступу для передачі даних (МД) без відхилення від основного об'єму і різних переваг винаходу. Базова станція 101 може включати в себе ряд компонентів, наприклад, контролер базової станції і базову приймально-передавальну систему. Для простоти, ці компоненти не показані. Базова станція 101 може здійснювати зв'язок з іншими базовими станціями, наприклад, базовою станцією 160. Центр комутації мобільного зв'язку (не показаний) може керувати різними аспектами роботи системи 100 зв'язку і відносно ретрансляційної лінії 199 між мережею 105 і базовими станціями 101 і 160. Базова станція 101 здійснює зв'язок з кожною мобільною станцією, яка знаходиться в її зоні покриття, за допомогою сигналу прямої лінії зв'язку, що передається з базової станції 101. Сигнали прямої лінії зв'язку, адресовані мобільним станціям 102-104, можуть підсумовуватися для формування сигналу 106 прямої лінії зв'язку. Пряма лінія зв'язку може переносити декілька різних каналів прямої лінії зв'язку. Кожна з мобільних станцій 102104, які приймають сигнал 106 прямої лінії зв'язку, декодує сигнал 106 прямої лінії зв'язку для витягання інформації, адресованої її користувачеві. Базова станція 160 також може здійснювати зв'язок з мобільними станціями, які знаходяться в її 92133 8 зоні покриття, за допомогою сигналу прямої лінії зв'язку, що передається з базової станції 160. Мобільні станції 102-104 також можуть здійснювати зв'язок з базовими станціями 101 і 160 по відповідних зворотних лініях зв'язку. Кожна зворотна лінія зв'язку підтримується сигналом зворотної лінії зв'язку, наприклад, сигналами 107-109 зворотної лінії зв'язку для відповідних мобільних станцій 102104. Сигнали 107-109 зворотної лінії зв'язку, хоч можуть бути адресовані одній базовій станції, можуть прийматися на інших базових станціях. Базові станції 101 і 160 можуть одночасно здійснювати зв'язок із спільною мобільною станцією. Наприклад, мобільна станція 102 може знаходитися в безпосередній близькості до базових станцій 101 і 160, що дозволяє їй підтримувати зв'язок з обома базовими станціями 101 і 160. На прямій лінії зв'язку базова станція 101 передає сигнал 106 прямій лінії зв'язку, базова станція 160 -сигнал 161 прямій лінії зв'язку. На зворотній лінії зв'язку мобільна станція 102 передає сигнал 107 зворотній лінії зв'язку, що приймається обома базовими станціями 101 і 160. Для передачі пакету даних на мобільну станцію 102, може бути вибрана одна з базових станцій 101 і 160 для передачі пакету даних на мобільну станцію 102. На зворотній лінії зв'язку, обидві базові станції 101 і 160 можуть намагатися декодувати передачу даних трафіка з мобільної станції 102. Швидкість передачі даних і рівень потужності зворотної і прямої ліній зв'язку може підтримуватися відповідно до стану каналу між базовою станцією і мобільною станцією згідно з різними аспектами винаходу. На Фіг.2 показана блок-схема приймача 200, що використовується для обробки і демодуляції прийнятого сигналу МДКР, діючого згідно з різними аспектами винаходу. Приймач 200 можна використовувати для декодування інформації в сигналах зворотної і прямої ліній зв'язку. Приймач 200 можна використовувати для демодуляції пілот-каналу і декодування інформації на таких каналах даних, як основний канал, канал керування і допоміжні канали. Вибірки прийнятого сигналу (Rx) можуть зберігатися в ОЗП 204. Вибірки прийнятого сигналу генеруються системою 290 радіочастоти/проміжної частоти (РЧ/ПЧ) і антенною системою 292. Система 290 РЧ/ПЧ і антенна система 292 можуть включати в себе один або декілька компонентів для прийому множинних сигналів і РЧ/ПЧобробки прийнятих сигналів для діставання вигоди з посилення за рахунок рознесеного прийому. Множинні прийняті сигнали, що розповсюдилися по різних шляхах поширення, можуть виходити із спільного джерела. Антенна система 292 приймає РЧ сигнали і направляє РЧ сигнали в систему 290 РЧ/ПЧ. Система 290 РЧ/ПЧ може являти собою будь-який традиційний приймач РЧ/ПЧ. Прийняті РЧ сигнали фільтруються, перетворюються з пониженням частоти і цифруються для формування вибірок прийнятого сигналу на частотах модулюючого сигналу. Вибірки надходять на мультиплексор 252. Вихідний сигнал мультиплексора 252 надходить на пошуковий блок 206 і елементи 208 відведення. До них підключена система 210 керування. Об'єднувач 212 зв'язує елементи 208 відведення з 9 декодером 214. Система 210 керування може являти собою мікропроцесор з програмним керуванням і може розміщуватися в тій же інтегральній схемі або в окремій інтегральній схемі. Функція декодування в декодері 214 може відповідати турбо-декодеру або будь-яким іншим відповідним алгоритмам декодування. Сигнал, переданий від джерела, може бути закодований декількома шарами кодів. Таким чином, декодер 214 декодує прийняті вибірки відповідно до таких кодів. У ході роботи вибірки прийнятого сигналу надходять на мультиплексор 252. Мультиплексор 252 видає вибірки на пошуковий блок 206 і елементи 208 відведення. Блок 210 керування настроює елементи 208 відведення для здійснення демодуляції і зняття розширення по спектру прийнятого сигналу з різними зсувами за часом на основі результатів пошуку від пошукового блока 206. Результати демодуляції об'єднуються і направляються на декодер 214. Декодер 214 декодує дані і виводить декодовані дані. Зняття розширення по спектру каналів здійснюється шляхом множення вибірок прийнятого сигналу на комплекснозв'язану ПШ послідовність і призначену функцію Уолша з єдиною гіпотезою хронування, і, потім, цифрової фільтрації результуючих вибірок, нерідко, за допомогою накопичувальної схеми інтегрування і скидання (не показана). Такий метод добре відомий в техніці. Приймач 200 можна використовувати в приймальній частині базових станцій 101 і 160 для обробки сигналів зворотної лінії зв'язку, прийнятих від мобільних станцій, і в приймальній частині будь-якій з мобільних станцій для обробки прийнятих сигналів прямої лінії зв'язку. Декодер 214 може накопичувати об'єднану енергію для детектування символу даних. Кожний пакет даних може нести поле циклічного контролю надмірності (CRC). Декодер 214 може, спільно з системою 210 керування і/або іншими системами керування, перевіряти прийнятий пакет даних на предмет помилок. Якщо дані CRC не проходять, значить, прийнятий пакет даних прийнятий з помилкою. Система 210 керування і/або інші системи керування можуть посилати повідомлення негативного квітирування на передавач з метою повторної передачі пакету даних. На Фіг.3 показана блок-схема передавача 300 для передачі сигналів зворотної і прямої ліній зв'язку. Канальні дані для передачі надходять на модулятор 301 для модуляції. Модуляція може здійснюватися згідно з будь-якою із загальновідомих схем модуляцією, наприклад, КАМ, ФМн або ДФМн. До модуляції канальні дані для передачі можуть проходити через один або декілька шарів кодування. Канальні дані для передачі створюються для модулятора 301. Канальні дані для передачі приймаються модулятором 301. Швидкість передачі даних модуляції може бути вибрана блоком 303 вибору швидкості передачі даних і рівня потужності. Вибір швидкості передачі даних може проводитися на основі інформації зворотного зв'язку, отриманої від адресата. Швидкість передачі даних дуже часто залежить від стану каналу, крім інших чинників, що враховуються. Стан каналу може час від часу змінюватися. Вибір 92133 10 швидкості передачі даних також може час від часу змінюватися. Блок 303 вибору швидкості передачі даних і рівня потужності відповідно вибирає швидкість передачі даних на модуляторі 301. Вихідний сигнал модулятора 301 зазнає операції розширення по спектру і посилюється на блоці 302 для передачі з антени 304. Блок 303 вибору швидкості передачі даних і рівня потужності також вибирає рівень потужності для рівня посилення сигналу, що передається. Поєднання вибраних швидкості передачі даних і рівня потужності дозволяє правильно декодувати передані дані на місці прийому. На блоці 307 також генерується пілот-сигнал. Пілотсигнал посилюється до потрібного рівня на блоці 307. Рівень потужності пілот-сигналу може відповідати стану каналу в місці прийому. Пілот-сигнал може об'єднуватися з канальним сигналом на об'єднувачі 308. Об'єднаний сигнал може посилюватися на підсилювачі 309 і передаватися з антени 304. Антена 304 може являти собою будь-яку комбінацію антен, включаючи антенні решітки і конфігурації з декількома входами і декількома виходами. Згідно з Фіг.4, логічна блок-схема 400 зображає один або декілька етапів на передавальному кінці згідно з різними аспектами винаходу. Передавальним кінцем, у разі зворотної лінії зв'язку в системі 100 зв'язку, можуть бути мобільні станції, і передавачем може бути передавач 300. Згідно з різними аспектами винаходу, проблема суперечності між процесами керування швидкістю передачі даних і потужністю дозволяється за рахунок передачі і використання множинних (більше за один) пілот-каналів. Мобільні станції передають більше за один пілот-канал, зв'язані із зворотною лінією зв'язку. Згідно з одним варіантом здійснення мобільні станції передають два пілот-канали, зв'язані з передачею каналу даних. На етапі 401 мобільна станція визначає швидкість передачі даних каналу даних для передачі на приймальний кінець, наприклад, базову станцію 101 або 160. Швидкість передачі даних може визначатися на основі загальновідомих процесів. Такі процеси включають в себе визначення швидкості передачі даних на основі характеристик поширення каналу або запитуваної швидкості передачі даних. Швидкості передачі даних для передачі можуть коливатися від низького значення до високого значення. Стандарт, який задає експлуатаційні вимоги системи 100 зв'язку, може задавати діапазон. На етапі 402, визначена швидкість передачі даних порівнюється із заздалегідь визначеним значенням. Наприклад, заздалегідь визначене значення може бути таким, що дорівнює швидкості передачі даних від 38,400 біт/с до 115,200 біт/с. На етапі 403, якщо визначена швидкість передачі даних вища за заздалегідь визначене значення, то мобільна станція передає первинний пілот-канал і вторинний пілот-канал згідно з різними аспектами винаходу. Рівень потужності первинного пілот-каналу визначається незалежно від визначеної швидкості передачі даних. Рівень потужності первинного пілот-каналу, в загальному випадку, визначається відповідно до процесу керування потужністю; однак, згідно з ва 11 ріантом здійснення, рівень потужності не змінюється по відношенню до визначеної швидкості передачі даних. Вторинний пілот-канал передається на рівні потужності більш високому, ніж рівень потужності первинного пілот-каналу, згідно з різними аспектами винаходу. Рівень потужності вторинного пілот-каналу може в 19 разів перевищувати рівень потужності первинного пілот-каналу. У загальному випадку, система може допускати передачі даних на декількох різних швидкостях передачі даних. Кількість швидкостей передачі даних нижча за заздалегідь визначене значення може бути більша однієї. Згідно з ілюстративним варіантом здійснення, швидкості вищі за заздалегідь визначене значення рівні 115,200 біт/с, 230,400 біт/с і 307,200 біт/с, а швидкості нижчі за заздалегідь визначене значення дорівнюють 9,600 біт/с, 19,200 біт/с і 38,400 біт/с. Значення швидкості передачі даних можна замінити значеннями розміру корисного навантаження або будь-яким іншим параметром, значення якого вказує співвідношення в щонайменше одному аспекті, з швидкістю передачі даних передачі даних. Тому, заздалегідь визначене значення пов'язане з такими значеннями таких параметрів. Згідно з одним ілюстративним варіантом здійснення система може використовувати змішану автоматичну вторинну передачу (HARQ). У цьому випадку, швидкості передачі даних можуть не бути суворо задані, оскільки швидкість передачі даних залежить від того, скільки разів необхідно буде передати кадр для пакету даних, щоб завершити передачу з передавального кінця і правильно прийняти його на приймальному кінці. У такій системі заздалегідь визначене значення може являти собою розмір корисного навантаження кадру або канального інтервалу. Розмір корисного навантаження може включати в себе 192, 384, 768, 1536, 3072, 4608 і 6144 бітів. Розміри корисного навантаження 192, 384, 768 і 1536 бітів можуть бути нижчими за заздалегідь визначене значення. Тому, будь-яка передача даних при таких розмірах корисного навантаження передається без вторинного пілот-каналу. Розміри корисного навантаження 3072, 4608 і 6144 бітів можуть бути вищими за заздалегідь визначене значення. Тому, будь-яка передача даних при таких розмірах корисного навантаження передається з вторинним пілот-каналом. Згідно з різними аспектами винаходу рівень потужності первинного пілот-каналу не змінюється з швидкістю передачі даних. Відповідно, хоча швидкості передачі даних нижчі за заздалегідь визначене значення за відсутності передачі вторинного пілот-каналу, рівень потужності первинного пілот-каналу не залежить від швидкості передачі даних при здійсненні зв'язку. Згідно з різними аспектами винаходу, рівні потужності первинного і вторинного пілот-каналів для швидкостей передачі даних вищі за заздалегідь визначене значення залишаються незалежними від швидкостей передачі даних. Рівні потужності первинного і вторинного пілот-каналів, згідно з одним варіантом здійснення, залишаються в одному і тому ж відношенні для всіх швидкостей передачі даних вищі за заздалегідь визначене значення. 92133 12 На Фіг.5 представлена послідовність операцій 500 по прийому і декодуванню каналу даних, згідно з різними аспектами винаходу. На етапі 501 приймач може приймати первинний пілот-канал. Приймачем може бути базова станція в системі 100 зв'язку. Приймачем може бути приймач 200, показаний на Фіг.2. На етапі 502 приймач визначає, чи переданий прийнятий первинний пілотканал з вторинним піл от-канал ом. Таке визначення може здійснюватися шляхом пошуку рівня енергії вторинного пілот-каналу, що перевищує енергетичний поріг або рівень енергії первинного пілот-каналу. Оскільки вторинний пілот-канал передається на значно більш високому рівні, виявлення такого рівня енергії може легко здійснюватися приймачем 200 дуже швидко, наприклад, за один канальний інтервал, що дорівнює 1,25мс. Якщо вторинний пілот-канал виявлений, то на етапі 503 приймач 200 може об'єднувати первинний і вторинний пілот-канали для поліпшення фазової і амплітудної оцінки для об'єднання багатопроменевих сигналів інших каналів, наприклад, каналів даних в структурі приймача 200. Фахівцям в даній галузі очевидно, що поліпшені опорні фаза і амплітуда також корисні для інших типів приймачів, наприклад коректорів. Фахівцям в даній галузі також очевидно, що можливість швидко виявляти наявність вторинного пілот-каналу і його рівень відносно первинного пілот-каналу дає велику перевагу в реалізації, оскільки безпосередньо зменшує об'єм пам'яті, необхідний приймачу для буферизації сигналу до об'єднання багатопроменевих сигналів. На приймачі 200 така додаткова вимога до пам'яті привела б до збільшення розміру ОЗП 204 вибірок або до додання елементів на вході кожного елемента 208 відведення, що збільшило б їх складність. Коли первинний пілот-канал передається без вторинного пілот-каналу, оцінка ВСШ для керування потужністю може базуватися на прийнятому сигналі первинного пілот-каналу. Коли первинний пілот-канал передається з вторинним пілотканалом, оцінка ВСШ може базуватися на прийнятому сигналі вторинного пілот-каналу, оскільки вторинний пілот-канал може передаватися на більш високому рівні сигналу, ніж первинний канал. Об'єднання первинного і вторинного пілотканалів, визначених на етапі 503, також можна використовувати для генерації більш точної оцінки ВСШ каналу поширення для керування потужністю. Значення ВСШ первинного і вторинного пілотканалів можна об'єднувати відповідно до процесу зваженого об'єднання. Наприклад, значенню ВСШ вторинного пілот-каналу привласнюється більш високий ваговий коефіцієнт, ніж для первинного пілот-каналу, оскільки вторинний пілот-канал може передаватися на більш високому рівні сигналу, ніж первинний канал. Характеристика процесу керування потужністю також поліпшується на основі поліпшеного ВСШ, визначеного на етапі 503. Неточність оцінки ВСШ погіршує характеристику процесу керування потужністю, що приводить до неточності в регулюванні потужності приймача до потрібного значення. Для процесу керування потужністю, поліпшена оцінка 13 значення ВСШ порівнюється з порогом керування потужністю. Якщо ВСШ вище за поріг, то приймальний кінець наказує передавальному знизити рівень потужності передачі. Якщо ВСШ нижче за поріг, то приймальний кінець наказує передавальному підвищити рівень потужності передачі. Згідно з різними аспектами винаходу, процес керування потужністю на передавальному кінці регулює первинний пілот-канал рівень потужності у відповідь на команду керування потужністю. Рівень потужності вторинного пілот-каналу знаходиться, згідно з різними аспектами винаходу, в заздалегідь визначених відношеннях з рівнем потужності первинного пілот-каналу. Тому, коли рівень потужності первинного пілот-каналу змінюється у відповідь на команду керування потужністю, рівень потужності вторинного пілот-каналу змінюється відповідно; однак, відношення рівнів потужності залишається постійним. Затримана оцінка ВСШ також може погіршувати процес керування потужністю, коли канал змінюється згодом. Звичайно, затримка при оцінці ВСШ для керування потужністю становить 1 канальний інтервал. Оскільки час, необхідний для виявлення наявності вторинного пілот-сигналу також може складати один канальний інтервал, первинний і вторинний пілот-канали можна об'єднувати без помітного збільшення затримки в оцінюванні ВСШ. Тому керування потужністю як і раніше добре діє, коли канал змінюється згодом. Передавальний кінець також може передати канал вказівки швидкості (RICH) /спільно з передачею даних по каналу даних. Приймальний кінець на етапі 504 приймає RICH. RICH використовується на допомогу приймальному кінцю при визначенні швидкості передачі даних на каналі даних. Певна швидкість передачі даних використовується в процесі декодування каналу даних. Таким чином, щоб точно і правильно декодувати канал даних, інформація, отримана з RICH, повинна бути точною. У загальному випадку, для декодування RICH, приймач висуває декілька гіпотез про прийняті дані на RICH. Нарешті, приймач вибирає одну з гіпотез з найвищим рівнем довірчості. Оскільки приймачу треба перевірити декілька гіпотез, виявлення вторинного пілот-каналу може допомагати приймачу декодувати RICH. Таким чином, на етапі 505, приймач декодує RICH на основі щонайменше гіпотези про те, що вказівка швидкості передачі переданих даних відповідає швидкості передачі даних, що перевищує заздалегідь визначене значення, яке використовується на передавачі для запуску передачі вторинного пілот-каналу. Згідно з одним аспектом, приймач може ігнорувати будь-який вихід процесу декодування RICH, який відповідає швидкості передачі даних, яка нижча за заздалегідь визначену швидкість передачі даних. Аналогічно, якщо вторинний пілот-канал не виявлений, то швидкість передачі даних, швидше усього, нижча за заздалегідь визначене значення, яке використовується для запуску передачі вторинного пілот-каналу. На етапі 506 приймач декодує канал даних на основі декодованого RICH. Процес декодування може включати в себе процеси об'єднання багатопроменевих сигналів і демодуляції. Оцін 92133 14 ка поліпшених опорних фази і амплітуди, визначена на етапі 503, може використовуватися для процесу декодування на етапі 506. Згідно з іншими аспектами RICH може бути необхідним для перенесення меншої інформації, якщо передача вторинного пілот-каналу використовується згідно з різними аспектами винаходу. Коли треба передавати менше інформації, можна поліпшити характеристику процесу декодування. Наприклад, замість RICH, що допускає 32 можливих вводи для чотирьох ідентифікаторів підпакету і восьми можливих розмірів пакету кодера або допускаючого 33 можливих вводи з додатковим вводом покажчика нульової швидкості, передачу і виявлення вторинного пілот-каналу можна використовувати для зменшення об'єму даних, що вказує кількість розмірів пакету кодера, які можуть передаватися. Процес вказівки у швидкості за допомогою RICH може знижувати кількість можливих введень до 16 (або 17 з покажчиком нульової швидкості) завдяки використанню виявлення вторинного пілот-каналу для вказівки, який з чотирьох найбільших з восьми розмірів пакетів кодера використовується, і відсутність виявлення вторинного пілот-каналу для вказівки, який з найменших чотирьох розмірів пакетів кодера використовується. Згідно з одним ілюстративним варіантом здійснення, розміри пакету кодера можуть бути рівні 192 біти і 384 біти. Ідентифікатори підпакету можуть бути '0' і '1'. Тому RICH може містити будь-яке з 4 кодових слів, відповідних розміру пакету кодера і ідентифікатору підпакету. Кодові слова RICH можуть бути "00", "01", "10" і "11". Якщо наявність вторинного пілот-каналу використовується для зменшення розміру корисного навантаження, то RICH може використовувати тільки 2 кодових слова, наприклад, "00" і "01". Згідно з іншим варіантом здійснення рівень потужності вторинного пілот-каналу можна вибрати більш високим, ніж у первинного пілот-каналу згідно з деякою кількістю заздалегідь визначених відношень. Наприклад, якщо швидкість передачі даних каналу даних вища першого заздалегідь визначеного значення, але нижча другого заздалегідь визначеного значення, то рівень потужності вторинного пілот-каналу вищий, ніж у первинного пілот-каналу відповідно до першого заданого відношення. Крім того, якщо швидкість передачі даних каналу даних вища другого заздалегідь визначеного значення, то рівень потужності вторинного пілот-каналу вищий, ніж у первинного пілот-каналу відповідно до другого заданого відношення. На приймальному кінці, після виявлення первинного пілот-каналу, рівень потужності вторинного пілотканалу може визначати діапазон очікуваних значень декодування RICH. Якщо відношення рівнів прийнятої потужності первинного і вторинного пілот-каналів відповідає першому відношенню, то очікуване значення декодованого RICH буде між першим і другим заздалегідь визначеними значеннями. Якщо відношення рівнів прийнятої потужності первинного і вторинного пілот-каналів відповідає другому відношенню, то очікуване значення декодованого RICH буде вище другого заздалегідь визначеного значення. 15 Вибір оптимального сукупного рівня потужності пілот-каналів можна описати за допомогою наступних графіків. Для швидкостей передачі даних R4, R5 і R6 рівень потужності об'єднаних первинного і вторинного пілот-каналів вибирають так, щоб сумарний рівень потужності відповідав оптимальному рівню потужності, майже придатному для швидкостей передачі даних R4, R5 і R6. Для швидкостей передачі даних R1, R2 і R3 рівень потужності пілотсигналу являє собою рівень потужності первинного піл от-каналу. Аналогічно, сумарну потужність піл от-каналу вибирають так, щоб рівень потужності був майже придатний для швидкостей передачі даних R1, R2 і R3. Заздалегідь визначене значення, яке встановлює, чи передавати вторинний пілот-канал, знаходиться між значеннями R3 і R4. Таким чином, рівень потужності пілот-каналу вибирають поблизу оптимального рівня, в той же час дозволяючи процесам керування швидкістю передачі даних і керування потужністю діяти спільно без яких-небудь протиріч між потребами в передачі більш високого рівня потужності пілот-сигналу для високих швидкостей передачі даних і керуванням потужністю на основі ВСШ прийнятого пілотканалу. Фахівцеві в даній галузі очевидно, що різні ілюстративні логічні блоки, модулі, схеми і етапи алгоритму, описані в зв'язку з розкритими тут варіантами ./здійснення, можуть бути реалізовані у вигляді електронного обладнання, комп'ютерного програмного забезпечення або їх комбінації. Щоб виразно проілюструвати цю взаємозамінність обладнання і програмного забезпечення, різні ілюстративні компоненти, блоки, модулі і етапи були описані вище, загалом, застосовно до їх функціональних можливостей. Чи будуть ці функціональні можливості реалізовані апаратними або програмними засобами, залежить від конкретного застосування і конструктивних обмежень, накладених на 92133 16 систему загалом. Фахівці в даній галузі можуть реалізувати описані функціональні можливості різними способами для кожної конкретної області застосування, але такі рішення по реалізації не треба інтерпретувати як відхід від об'єму даного винаходу. Різні ілюстративні логічні блоки і модулі, описані в зв'язку з розкритими тут варіантами здійснення, можна реалізовувати або здійснювати за допомогою процесора загального призначення, цифрового сигнального процесора (ЦСП), спеціалізованої інтегральної схеми (СІС), програмованої користувачем вентильної матриці (ПКВМ) або іншого програмованого логічного пристрою, дискретної вентильної або транзисторної логіки, дискретних апаратних компонентів або будь-якої їх комбінації, призначеної для здійснення описаних тут функцій. Процесор загального призначення може являти собою мікропроцесор, але, альтернативно, процесор може являти собою будь-який традиційний процесор, контролер, мікроконтролер або кінцевий автомат. Процесор також може бути реалізований як комбінація обчислювальних пристроїв, наприклад, комбінація ДСП і мікропроцесора, сукупність мікропроцесорів, один або декілька мікропроцесорів в поєднанні з ядром ЦСП або будь-яка інша подібна комбінація. Етапи способу або алгоритму, описані в зв'язку з розкритими тут варіантами здійснення, можуть бути реалізовані безпосередньо в обладнанні, в програмному модулі, що виконується процесором, або в їх комбінації. Програмний модуль може розміщуватися в ОЗП, флеш-пам'яті, ПЗП, ЕППЗП, ЕСППЗП, регістрах, на жорсткому диску, змінному диску, CD-ROM або носії даних будь-якого іншого типу, відомого в техніці. Ілюстративний носій даних підключений до процесора, внаслідок чого процесор може зчитувати з нього інформацію і записувати на нього інформацію. Альтернативно, носій даних може утворювати з процесором єдине У ціле. Процесор і носій даних можуть розміщуватися в СІС. СІС може знаходитися в абонентській станції. Альтернативно, процесор і носій даних можуть розміщуватися в користувацькому терміналі як дискретні компоненти. Вищенаведений опис розкритих варіантів здійснення наданий, щоб фахівець в даній галузі міг використовувати даний винахід. Фахівцеві в даній галузі повинні бути очевидні різні модифікації цих варіантів здійснення, і розкриті тут загальні принципи можна застосовувати до інших варіантів здійснення, не застосовуючи винахідницьких здібностей. Таким чином, даний винахід не обмежується показаними тут варіантами здійснення, але підлягає розгляду в найширшому об'ємі, який узгоджується з розкритими тут принципами і відмітними ознаками. 17 92133 18 19 92133 20 21 Комп’ютерна верстка Л. Купенко 92133 Підписне 22 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for data transmission over communication system
Автори англійськоюLandby Stan A., Odenwalder Joseph P.
Назва патенту російськоюСпособ и устройство для передачи данных в системе связи
Автори російськоюЛандби Стейн А., Оденвальдер Джозеф П.
МПК / Мітки
МПК: H04B 7/005, H04W 52/00
Мітки: спосіб, даних, передачі, системі, пристрій, зв'язку
Код посилання
<a href="https://ua.patents.su/11-92133-sposib-i-pristrijj-dlya-peredachi-danikh-v-sistemi-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для передачі даних в системі зв’язку</a>
Спосіб одночасної передачі сукупності типів даних та спосіб прийому передачі, мультиплексованої з розділенням часу у системі безпровідного звязку, а також передавальний та приймальний вузли такої системи
Номер патенту: 74396
Опубліковано: 15.12.2005
Автори: Ландбі Стайн А., Вілленеґґер Серж
МПК: H04L 27/00, H04J 4/00, H04B 7/26, H04J 13/00
Мітки: даних, одночасної, такої, мультиплексованої, сукупності, часу, передачі, також, розділенням, системі, зв'язку, типів, безпровідного, передавальний, спосіб, приймальний, вузлі, прийому
Формула / Реферат:
1. Спосіб одночасної передачі сукупності типів даних у системі безпровідного зв'язку, який включає:- прийом і обробку першого типу даних згідно з першою схемою обробки сигналу для генерування першого корисного навантаження,- прийом і обробку другого типу даних згідно з другою схемою обробки сигналу для генерування другого корисного навантаження,- визначення у інтервалі передачі першої частини, призначеної для передачі...
Пристрій безпровідної передачі даних (варіанти) та спосіб керування потоком даних у розподільній системі передачі даних (варіанти)
Номер патенту: 75914
Опубліковано: 15.06.2006
Автори: роб Метью С., Кімбалл Роберт Г., Бендер Пол І., Кармі Гаді
МПК: H04L 12/56, H04L 12/28
Мітки: розподільний, спосіб, безпровідної, передачі, пристрій, даних, керування, потоком, системі, варіанти
Формула / Реферат:
1. Пристрій безпровідної передачі даних, який включає:- сукупність пунктів доступу до мережі, причому кожний із зазначеної сукупності пунктів доступу до мережі має конфігурацію для: зв‘язку з щонайменше двома з сукупності маршрутизаторів і зв'язку з щонайменше одним віддаленим користувачем.2. Пристрій за п. 1, який відрізняється тим, що додатково має сукупність опорних точок, причому кожна із зазначеної сукупності...
Спосіб підтримки передачі пакетних даних і передачі даних з низькою затримкою через множину каналів у системі безпровідного зв’язку, а також пристрій прийому пакетних даних через щонайменше один канал першого н
Номер патенту: 75612
Опубліковано: 15.05.2006
Автори: Ландбі Стайн А., Бао Ґанґ, Разумов Леонід
МПК: H04L 12/56, H04Q 7/38
Мітки: даних, щонайменше, прийому, канал, низькою, підтримки, першого, передачі, системі, пакетних, затримкою, множину, каналів, пристрій, безпровідного, також, спосіб, зв'язку
Формула / Реферат:
1. Спосіб підтримки передачі пакетних даних і передачі даних з низькою затримкою через множину каналів передачі у системі безпровідного зв'язку, який включає:- передачу пакетних даних через набір каналів пакетних даних, - передачу керуючої інформації, пов'язаної з цими пакетними даними через канал сигналізації, причому канал сигналізації відокремлений від набору каналів передачі пакетних даних, і керуюча інформація ідентифікує...
Спосіб і пристрій (варіанти) для визначення швидкості передачі даних у системі безпровідного зв’язку з швидкісною передачею пакетів даних
Номер патенту: 74213
Опубліковано: 15.11.2005
Автори: Ландбі Стайн А., Бао Ґанґ, Вей Йонбін, Разумов Леонід
МПК: H04Q 7/00
Мітки: пакетів, пристрій, варіанти, передачею, системі, швидкісною, безпровідного, зв'язку, передачі, визначення, спосіб, швидкості, даних
Формула / Реферат:
1. Пристрій безпровідного зв'язку, який включає:- перший процесор, призначений оперативно приймати перший показник, що відповідає наявній потужності передачі пакетних даних; і- кореляційний вузол, призначений оперативно визначати показник швидкості передачі пакетних даних як функцію першого показника і сили прийнятого пілот-сигналу.2. Пристрій за п. 1, який відрізняється тим, що перший показник відповідає відношенню...
Спосіб і пристрій для оцінки максимальної швидкості передачі даних зворотної лінії зв’язку для оцінки потужності, яка потрібна для передачі даних у системі зв’язку
Номер патенту: 82993
Опубліковано: 10.06.2008
Автори: Блек Пітер Дж., Аттар Рашід А., Сіндхушаяна Нагабхушана
МПК: H04L 1/00, H04B 7/005
Мітки: яка, потужності, оцінки, системі, швидкості, лінії, передачі, зворотної, зв'язку, даних, спосіб, максимально, потрібна, пристрій
Формула / Реферат:
1. Спосіб розрахунку максимальної швидкості передачі даних по зворотній лінії зв'язку, що включає:визначення джерелом даних показника якості лінії зв'язку, по якій повинні передаватися дані, де вказаний показник якості зв'язаний з потужністю передачі пілот-сигналу;модифікування вказаного показника якості відповідно до запасу регулювання потужності передачі івизначення максимальної швидкості передачі даних відповідно до...
Попередній патент: Високоактивні рекомбінантні віруси грипу для вакцин і генотерапії
Наступний патент: Сполука, що має анти-вгс дію та фармацевтична композиція, що її містить
Випадковий патент: Робоча машина та конструкція підвіски для задніх самоустановлюваних коліс на робочій машині