Пристрій векторного керування для електродвигуна змінного струму для забезпечення режимів руху та регенеративного гальмування
Номер патенту: 92933
Опубліковано: 10.09.2014
Автори: Бондаренко Юлія Олегівна, Миколаєнко Юлія Олександрівна, Бялобржеський Олексій Володимирович

Формула / Реферат
Пристрій векторного керування для електродвигуна змінного струму для забезпечення режимів руху та регенеративного гальмування, що містить ланцюг LC-фільтра, що включає в себе індуктивність і ємність у ланці постійного струму, накопичувальний конденсатор, автономний інвертор, що перетворює напругу на конденсаторі у змінну напругу з певною частотою, асинхронний електродвигун змінного струму, з'єднаний з датчиком швидкості, систему керування автономним інвертором, яка складається з задавачів струму по осі d (осі q), які виходами з'єднані з першими входами сьомого і дев'ятого суматора відповідно, до других входів яких з'єднані другий і перший вихід першого координатного перетворювача, входи якого з'єднані з входом низькочастотного фільтра, виходи якого з'єднані з виходом другого, третього та четвертого датчика струму, які з'єднані з фазами статора асинхронного електродвигуна змінного струму, виходи сьомого і дев'ятого суматорів з'єднані з регуляторами струму по осі d (осі q) відповідно, виходи цих регуляторів з'єднані з першим і другим входом другого координатного перетворювача через другий і четвертий обмежувач, вихід першого координатного перетворювача з'єднаний з входом другого широтно-імпульсного модулятора, вихід якого з'єднаний з керуючим входом автономного інвертора, виходи задавачів струму по осі d (осі q) з'єднані відповідно до другого та першого входу блока визначення кутової частоти поля статора, вихід якого з'єднаний з першим входом десятого суматора, другий вхід якого з'єднаний з датчиком швидкості через масштабуючий блок, вихід десятого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний з четвертим входом першого координатного перетворювача і третім входом другого координатного перетворювача, який відрізняється тим, що задавач струму по осі q, представлений задавачем швидкості, вихід якого з'єднаний з першим входом восьмого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід восьмого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний з першим входом дев'ятого суматора через третій обмежувач, LC-фільтр з'єднаний з виходом 4qs-перетворювача, та другим датчиком напруги, вихід якого з'єднаний з другим входом першого суматора, на перший вхід якого надходить задане значення напруги ланки постійного струму, вихід першого суматора з'єднаний з входом регулятора напруги ланки постійного струму, вихід якого з'єднаний з першим входом блока множення, другий вхід якого з'єднаний з блоком формування синусоїдального сигналу контуру корекції фази, вхід якого з'єднаний з виходом четвертого суматора, на другий вхід якого надходить задане значення фази, перший вхід четвертого суматора з'єднаний з виходом регулятора фази, вхід якого з'єднаний з виходом третього суматора, на другий вхід якого надходить задане значення фазового зрушення, перший вхід третього суматора з'єднано з виходом другого суматора, перший вхід якого з'єднаний з виходом датчика фази напруги, вхід якого з'єднаний з першим датчиком напруги на вході 4qs-перетворювача, другий вхід суматора з'єднаний з виходом датчика фази струму, вхід якого з'єднаний з першим датчиком струму на вході 4qs-перетворювача, який з'єднано з другим входом п'ятого суматора, перший вхід якого з'єднаний з виходом блока множення, вихід п'ятого суматора з'єднаний з входом регулятора струму мережі, вихід якого з'єднаний з першим входом шостого суматора, другий вхід якого з'єднаний з першим датчиком напруги, вихід шостого суматора з'єднаний з першим входом блока ділення, другий вхід якого з'єднаний з другим датчиком напруги, вихід блока ділення з'єднаний з першим широтно-імпульсним модулятором через перший блок обмеження, перший широтно-імпульсний модулятор з'єднаний з керуючим входом 4qs-перетворювача, силовий вхід якого з'єднаний через датчик струму з мережею, з якою з'єднаний перший датчик напруги.
Текст
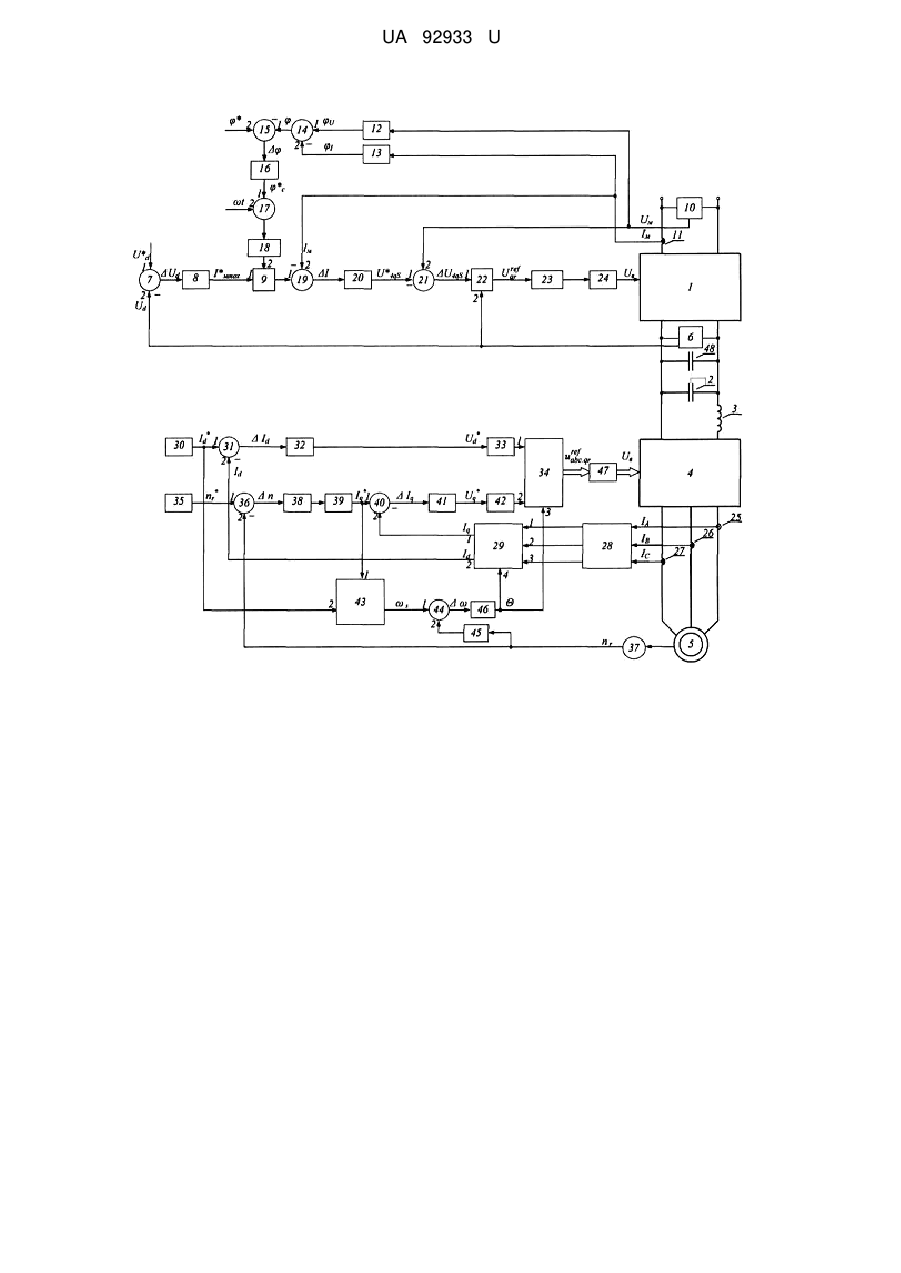
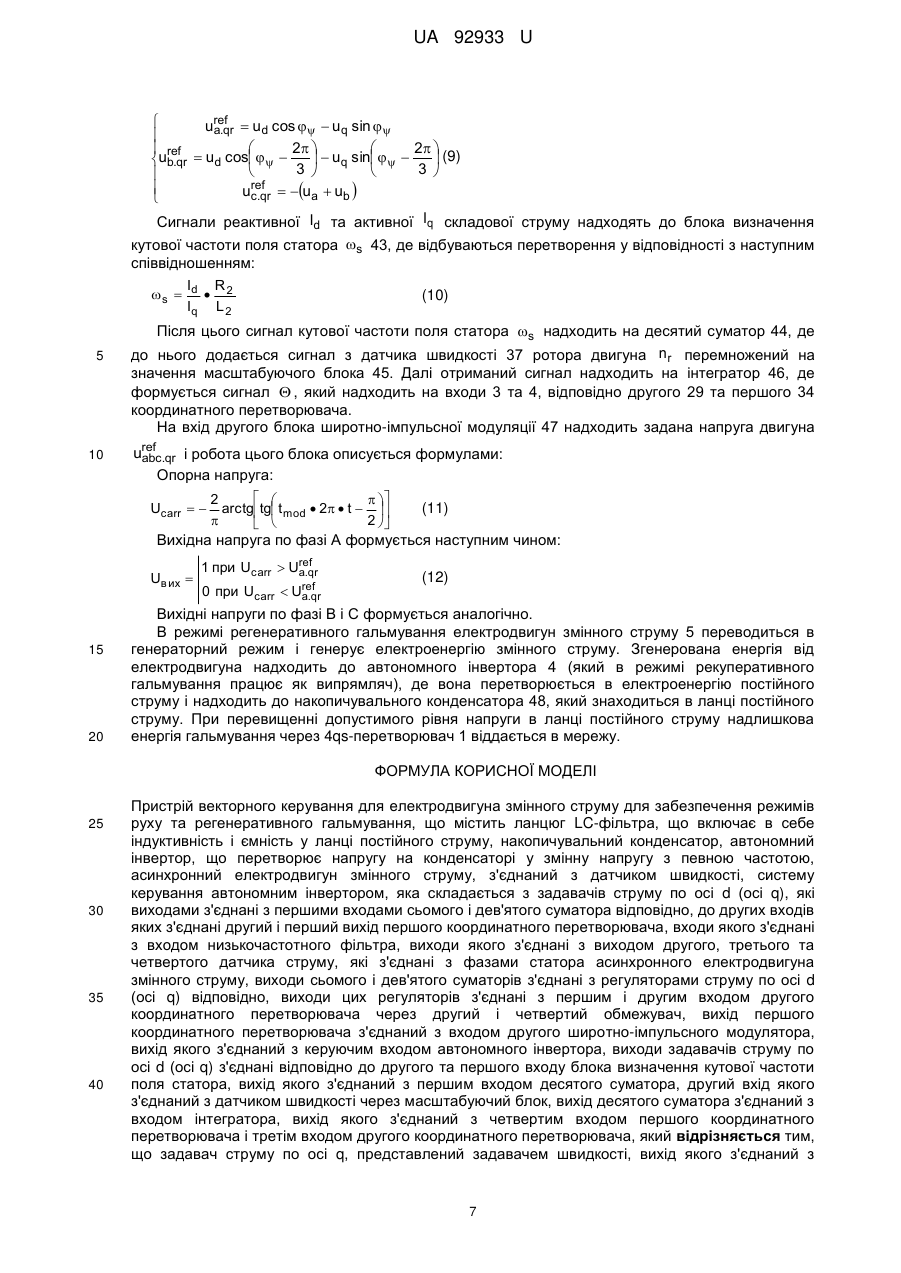
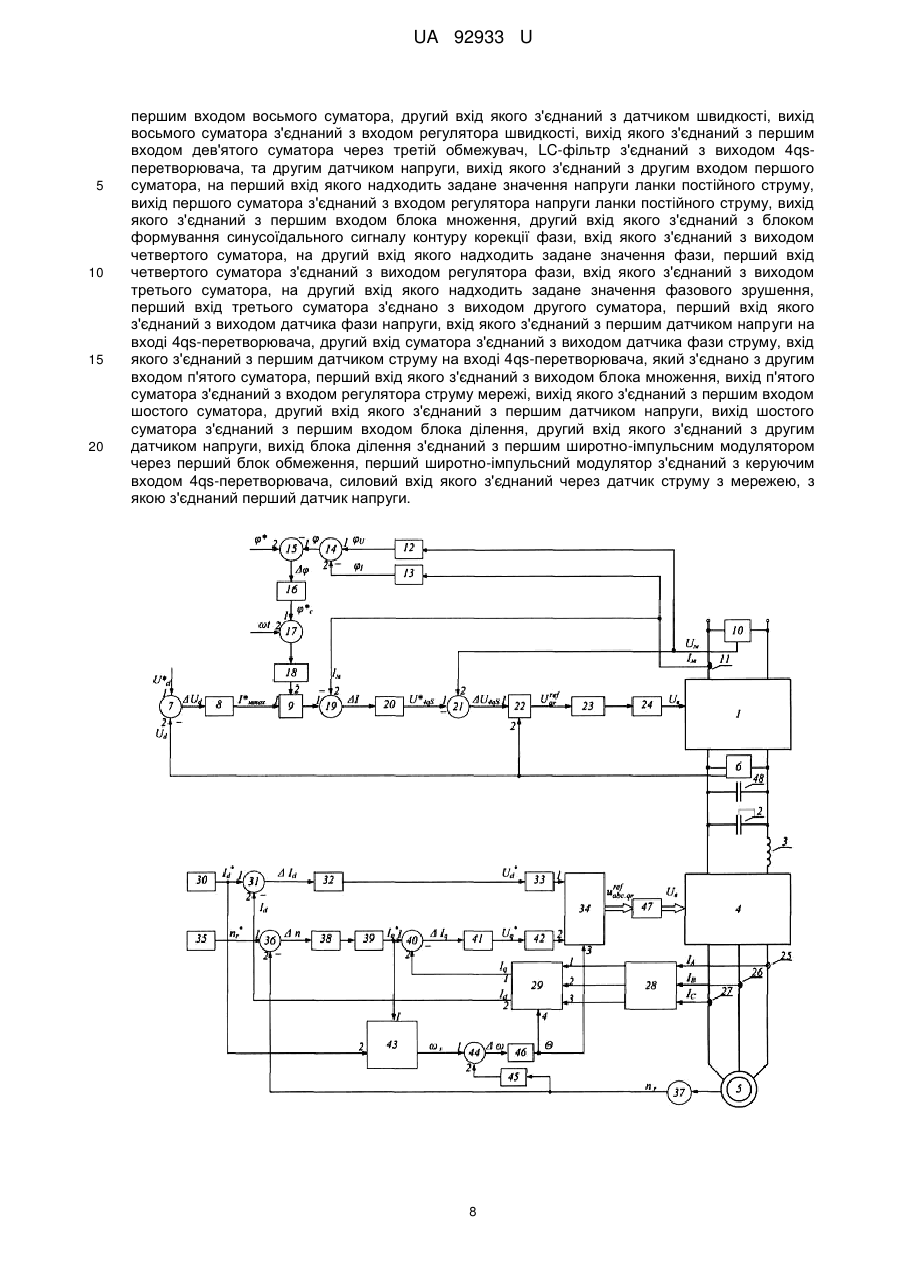
Реферат: Пристрій векторного керування для електродвигуна змінного струму для забезпечення режимів руху та регенеративного гальмування містить ланцюг LC-фільтра, що включає в себе індуктивність і ємність у ланці постійного струму, накопичувальний конденсатор, автономний інвертор, асинхронний електродвигун змінного струму, з'єднаний з датчиком швидкості, систему керування автономним інвертором. Задавач струму по осі q, представлений задавачем швидкості, вихід якого з'єднаний з першим входом восьмого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід восьмого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний з першим входом дев'ятого суматора через третій обмежувач, LC-фільтр з'єднаний з виходом 4qs-перетворювача, та другим датчиком напруги, вихід якого з'єднаний з другим входом першого суматора, на перший вхід якого надходить задане значення напруги ланки постійного струму. Вихід першого суматора з'єднаний з входом регулятора напруги ланки постійного струму, вихід якого з'єднаний з першим входом блока множення, другий вхід якого з'єднаний з блоком формування синусоїдального сигналу контуру корекції фази, вхід якого з'єднаний з виходом четвертого суматора, на другий вхід якого надходить задане значення фази, перший вхід четвертого суматора з'єднаний з виходом регулятора фази, вхід якого з'єднаний з виходом третього суматора, на другий вхід якого надходить задане значення фазового зрушення, перший вхід третього суматора з'єднано з виходом другого суматора, перший вхід якого з'єднаний з виходом датчика фази напруги, вхід якого з'єднаний з першим датчиком напруги на вході 4qs-перетворювача, другий вхід суматора з'єднаний з виходом датчика фази струму, вхід якого з'єднаний з першим датчиком струму на вході 4qsперетворювача, який з'єднано з другим входом п'ятого суматора, перший вхід якого з'єднаний з виходом блока множення, вихід п'ятого суматора з'єднаний з входом регулятора струму мережі, вихід якого з'єднаний з першим входом шостого суматора, другий вхід якого з'єднаний з першим датчиком напруги, вихід шостого суматора з'єднаний з першим входом блока ділення, другий вхід якого з'єднаний з другим датчиком напруги, вихід блока ділення з'єднаний з першим широтно-імпульсним модулятором через перший блок обмеження, перший широтно-імпульсний модулятор з'єднаний з керуючим входом 4qs-перетворювача, силовий вхід якого з'єднаний через датчик струму з мережею, з якою з'єднаний перший датчик напруги. UA 92933 U (12) UA 92933 U UA 92933 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки і може бути використана в промисловості та на електрифікованих залізницях для векторного керування електродвигуном змінного струму з автономним інвертором для забезпечення динамічних режимів руху та регенеративного гальмування з можливістю повернення надлишкової енергії гальмування в мережу. Відомий спосіб (Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, Патент України 30471. МПК Н02Р 7/00, Н02Р 21/00. Опубл. 25.02.2008 Бюл. № 4 Волков О.В., Косенко І.О.), в якому регульоване джерело постійного струму виконане у вигляді трифазної мостової схеми нереверсивного тиристорного керованого випрямляча, підключеного входом до трифазної мережі змінного струму, з'єднаного виходом через згладжуючий реактор з входом автономного інвертора струму і зв'язаного керуючим входом через систему імпульсно-фазового керування з виходом регулятора струму, перший з входів якого є задаючим входом і з'єднаний з виходом обчислювача завдання регульованому джерелу, а другий вхід регулятора струму є входом від'ємного зворотного зв'язку і з'єднаний з виходом датчика струму, підключеного своїм входом до входу автономного інвертора струму. Блок керування виконаний у вигляді обчислювача модуля і перетворювача фаз, першого і другого обчислювачів гармонійних функцій, обчислювача фазних струмів інвертора, обчислювача прогнозуючого функціонала і обчислювача екстремального значення. При цьому перші входи обчислювача модуля і обчислювача гармонійних функцій з'єднані разом і є першим входом блока керування, а другі входи обчислювача модуля і обчислювача гармонійних функцій також з'єднані разом і є другим входом блока керування. Вхід обчислювача фазних струмів інвертора з'єднаний з одним з входів обчислювача гармонійних функцій і виходом датчика струму і є третім входом блока керування, а вихід обчислювача фазних струмів інвертора пов'язаний через перетворювач фаз з іншим входом обчислювача гармонійних функцій. Обчислювач прогнозуючого функціонала з'єднаний своїми першим і другим входами відповідно з виходами першого і другого обчислювачів гармонійних функцій, а виходом - з входом обчислювача екстремального значення, вихід якого є виходом блока керування і пов'язаний через систему керування інвертором з керуючими входами інвертора. Обчислювач відхилень проекцій струму виконаний у вигляді координатного перетворювача, датчика гармонійних функцій потокозчеплення і блока суматорів, причому, перший вхід координатного перетворювача з'єднаний з першим входом обчислювача завдання регульованому джерелу і виходом задавача намагнічувальної проекції струму і є першим входом обчислювача відхилень проекцій струму, а другий вхід координатного перетворювача підключений до другого входу обчислювача завдання регульованому джерелу і до виходу задавача активної проекції струму і є другим входом обчислювача відхилень проекцій струму. Третій і четвертий входи координатного перетворювача сполучені з першим і другим входами датчика гармонійних функцій потокозчеплення, а перший і другий виходи координатного перетворювача підключені до першого і другого входів блока суматорів, третій і четвертий входи якого сполучені з першим і другим виходами датчика проекцій статорного струму і є третім і четвертим входами обчислювача відхилень проекцій струму, а перший і другий виходи блока суматорів є першим і другим виходами обчислювача відхилень проекцій струму і приєднані до першого і другого входів блока керування. Датчик проекцій статорного струму виконаний у вигляді блока датчиків струму, підключеного своїми двома входами до двох фазних статорних обмоток двигуна, а двома виходами - до першого і другого входів обчислювача проекцій статорного струму, виходи якого є першим і другим виходами датчика проекцій статорного струму. Спільними ознаками аналога і корисної моделі, що заявляється, є: регульоване джерело постійного струму, виконане у вигляді трифазної мостової схеми керованого випрямляча, яке з'єднане виходом через згладжуючий реактор з входом автономного інвертора. Блок керування виконаний у вигляді обчислювача модуля і перетворювача фаз, обчислювача фазних струмів інвертора. Обчислювач відхилень проекцій струму, виконаний у вигляді координатного перетворювача, блок суматорів, причому, перший вхід координатного перетворювача з'єднаний з виходом задавача намагнічувальної проекції струму і є входом обчислювача відхилень проекцій струму, а другий вхід координатного перетворювача підключений до виходу задавача активної проекції струму і є входом обчислювача відхилень проекцій струму. Виходи координатного перетворювача підключені до входів блока суматорів, входи якого сполучені з виходами датчика проекцій статорного струму і є входами обчислювача відхилень проекцій струму, а виходи блока суматорів є виходами обчислювача відхилень проекцій струму і приєднані до першого і другого входів блока керування. Датчик проекцій статорного струму виконаний у вигляді блока датчиків струму, підключеного своїми входами до фазних статорних 1 UA 92933 U 5 10 15 20 25 30 35 40 45 50 55 60 обмоток двигуна, а виходами - до першого і другого входів обчислювача проекцій статорного струму, виходи якого є першим і другим виходами датчика проекцій статорного струму. Причини, що перешкоджають одержанню очікуваного технічного результату: пристрій не має накопичувачів енергії, що робить неможливим режим регенеративного гальмування; блок керування виконаний спільним, як для випрямляча, так і для інвертора, що значно ускладнює керування при поверненні надлишкової енергії гальмування в мережу. Відомий пристрій (Частотно-регульований асинхронний електропривод, Патент РФ №2401502. МПК Н02Р 21/00, Н02Р 21/12, Н02Р 21/13, Н02Р 27/08. Опубл. 10.10.2010 Бюл. № 28 Александров Є.В., Александров Н.Є., Лагун В.В., Клімов Г.Г.), в якому силовий блок із вхідними в нього послідовно з'єднаними випрямлячем напруги мережі, згладжуючим фільтром з датчиком напруги, інвертором напруги, керуючі входи якого з'єднані з виходами блока векторної широтноімпульсної модуляції, асинхронним електродвигуном, обмотки якого підключені через блок датчиків фазних струмів до виходу інвертора напруги, а вихідний вал до датчика швидкості обертання його ротора й до передавального механізму, задавач поточної кутової швидкості електродвигуна, задавач потокозчеплення електродвигуна, послідовно з'єднані регулятор частоти обертання, до другого входу якого підключений вихід датчика швидкості обертання ротора, і перший блок розподілу, регулятори активного й реактивного струму, координатний перетворювач напруг, виходи якого підключені до входів блока векторної широтно-імпульсної модуляції, координатний перетворювач струмів, з'єднаний входами до виходів блока датчиків фазних струмів, а виходами із другим входом регулятора реактивного струму й з першим входом регулятора активного струму, блоком спостереження стану електропривода, з першим і другим масштабними підсилювачами, аперіодичною ланкою, дільником, першим інтегратором і першим суматором, при цьому вихід першого масштабного підсилювача підключений до першого входу дільника, вихід якого через перший інтегратор підключений до першого входу першого суматора, до другого входу якого підключений вихід другого масштабного підсилювача, вихід першого суматора підключений до одного із входів блока векторної широтно-імпульсної модуляції, до входу координатного перетворювача струмів і до входу координатного перетворювача напруг, вихід аперіодичної ланки з'єднаний із другим входом дільника й другим входом першого блока розподілу, а датчик швидкості обертання ротора електродвигуна виконаний у вигляді імпульсного датчика із двома виходами, перший з яких є виходом кутового положення ротора електродвигуна, а другий - виходом швидкості обертання ротора електродвигуна, при цьому перший вихід імпульсного датчика з'єднаний із входом другого масштабного підсилювача, уведені послідовно з'єднані перший функціональний перетворювач, перший і другий вхід якого з'єднані відповідно з виходом задавача потокозчеплення й другим виходом імпульсного датчика, перший множник, регулятор потокозчеплення, другий вхід якого з'єднаний з виходом аперіодичної ланки, і перший блок обмеження, вихід якого підключений до першого входу регулятора реактивного струму й входу аперіодичної ланки, другий функціональний перетворювач, вихід якого підключений до другого входу першого множника, послідовно з'єднані другий блок обмеження, до входу якого підключений регулятор реактивного струму і другий суматор, послідовно з'єднані третій блок обмеження, до входу якого підключений регулятор активного струму і третій суматор, блок обмеження напруги, до першого й другого входу якого підключені відповідно другий і третій суматори, а виходи блока обмеження напруги підключені до входів координатного перетворювача напруг, блок корекції, перший, другий, третій і четвертий входи якого підключені відповідно до першого й другого виходу координатного перетворювача струмів, до другого виходу імпульсного датчика й виходу аперіодичної ланки, а перший і другий виходи відповідно до других входів другого й третього суматорів, послідовно з'єднані перший релейний елемент, вхід якого підключений до виходу задавача потокозчеплення, і логічний суматор, другий релейний елемент, вхід якого підключений до виходу аперіодичної ланки, а вихід - до другого входу логічного суматора, послідовно з'єднані комутатор і задавача інтенсивності, вихід якого підключений до першого входу регулятора частоти обертання електродвигуна, а також четвертий блок обмеження, вхід якого підключений до виходу першого блока розподілу, а вихід - до другого входу регулятора активного струму й входу першого масштабного підсилювача, при цьому керуючий вхід комутатора з'єднаний з виходом логічного суматора. Спільними ознаками аналога і корисної моделі, що заявляється, є: силовий блок, складовими якого є послідовно з'єднані випрямляч напруги мережі, згладжуючий фільтр з датчиком напруги, інвертор напруги, керуючі входи якого з'єднані з виходами блока векторної широтно-імпульсної модуляції, асинхронний електродвигун, обмотки якого підключені через блок датчиків фазних струмів до виходу інвертора напруги, а вихідний вал до датчика швидкості обертання його ротора, послідовно з'єднані регулятор частоти обертання, до другого входу 2 UA 92933 U 5 10 15 20 25 30 35 40 45 50 55 60 якого підключений вихід датчика швидкості обертання ротора, і перший блок розподілу, регулятори активного й реактивного струму, координатний перетворювач напруг, виходи якого підключені до входів блока векторної широтно-імпульсної модуляції, координатний перетворювач струмів, з'єднаний входами до виходів блока датчиків фазних струмів, а виходами із другим входом регулятора реактивного струму й з першим входом регулятора активного струму, блок спостереження стану електропривода, який складається з дільника, першого інтегратора і першого суматора, підключений до одного із входів блока векторної широтно-імпульсної модуляції, до входу координатного перетворювача струмів і до входу координатного перетворювача напруг, а датчик швидкості обертання ротора електродвигуна вихід якого з'єднаний з регулятором швидкості, регулятори реактивного та активного струму послідовно з'єднані з блоком обмеження напруги, а вихід блока обмеження напруги з'єднані з входами координатного перетворювача напруги. Причини, що перешкоджають одержанню очікуваного технічного результату: пристрій не має накопичувачів енергії, що робить неможливим режим регенеративного гальмування; відсутній блок керування випрямлячем, що робить неможливим режим повернення надлишкової енергії під час гальмування в мережу. Найбільш близьким аналогом є пристрій (Пристрій векторного керування для електродвигуна змінного струму, Патент РФ №2395895. МПК Н02Р 21/10, Н02Р 21/14, Н02Р 27/06, B60L 11/02, B60L 15/20. Опубл. 27.07.2010 Китанака Хидетоси), в якому пристрій векторного регулювання для електродвигуна змінного струму, що містить коло LC-фільтра, що включає в себе дросель і конденсатор, на стороні джерела живлення постійного струму, зворотний перетворювач, що перетворює напругу на конденсаторі у змінну напругу з певною частотою. Векторний контролер для векторного керування електродвигуна змінного струму відповідно до команди струму або команди обертового моменту, який складається з: контролерів струму по осі q (осі d), координатного перетворювача напруг, виходи якого підключені до входів блока векторної широтно-імпульсної модуляції, координатного перетворювача струмів, з'єднаного входами до виходів блока датчиків фазних струмів, а виходами із другим входом контролерів струму по осі d й з першим входом контролера по осі q, генератора команди кутової частоти ковзання, інтегратора і суматора, підключеного до входу координатного перетворювача струмів і до входу координатного перетворювача напруг, датчика швидкості обертання ротора електродвигуна, вихід якого з'єднаний з генератором команди кутової частоти ковзання, контролера демпфірування, який призначений для розрахунків робочої величини демпфірування для придушення зміни напруги конденсатора, що оперує командою струму або командою обертового моменту векторного контролера на основі розрахованої робочої величини демпфірування й керуючий зворотним перетворювачем так, що струм, який протікає через зворотний перетворювач, змінюється таким чином, щоб пригнічувати зміну, пов'язану з напругою конденсатора, при цьому контролер демпфірування встановлює в режимі руху зі споживанням енергії електродвигуна змінного струму як робочої величини демпфірування значення сигналу, отриманого шляхом зведення у квадрат ступеня зміни напруги конденсатора, і встановлює при роботі в режимі регенерації електродвигуна змінного струму як робочої величини демпфірування значення сигналу, отриманого шляхом зведення у квадрат сигналу, який отриманий у результаті інверсії фази ступені зміни напруги конденсатора. Спільними ознаками аналога і корисної моделі, що заявляється, є: пристрій векторного регулювання для електродвигуна змінного струму, що містить коло LC-фільтра, що включає в себе дросель і конденсатор, на стороні джерела живлення постійного струму, зворотний перетворювач, що перетворює напругу на конденсаторі у змінну напругу з певною частотою, векторний контролер для векторного керування електродвигуна змінного струму команди струму, який складається з: контролерів струму по осі q (осі d), координатного перетворювача напруг, виходи якого підключені до входів блока векторної широтно-імпульсної модуляції, координатного перетворювача струмів, з'єднаного входами до виходів блока датчиків фазних струмів, а виходами із другим входом контролерів струму по осі d й з першим входом контролера по осі q, генератора команди кутової частоти ковзання, інтегратора і суматора, підключеного до входу координатного перетворювача струмів і до входу координатного перетворювача напруг, датчик швидкості обертання ротора електродвигуна, вихід якого з'єднаний з генератором команди кутової частоти ковзання. Причини, що перешкоджають одержанню очікуваного технічного результату: відсутній вхідний блок перетворювача (випрямляч), що робить неможливим живлення пристрою від мережі змінного струму. В основу корисної моделі поставлена задача мінімізації втрат електричної енергії, що забезпечується пристроєм векторного керування для забезпечення динамічних режимів руху та 3 UA 92933 U 5 10 15 20 25 30 35 40 45 50 55 60 регенеративного гальмування з можливістю повернення надлишкової енергії під час гальмування в мережу з мінімізацією значень спотворень струмів та реактивної потужності. Поставлена задача вирішується тим, що пристрій векторного керування для електродвигуна змінного струму для забезпечення режимів руху та регенеративного гальмування містить коло LC-фільтра, що включає в себе індуктивність і ємність, у ланці постійного струму, накопичувальний конденсатор, автономний інвертор, що перетворює напругу на конденсаторі у змінну напругу з певною частотою, асинхронний електродвигун змінного струму з'єднаний з датчиком швидкості, систему керування автономним інвертором, яка складається з задавачів струму по осі d (осі q), які виходами з'єднані з першими входами сьомого і дев'ятого суматора відповідно, до других входів яких з'єднані другий і перший вихід першого координатного перетворювача, входи якого з'єднані з входом низькочастотного фільтра, виходи якого з'єднані з виходом другого, третього та четвертого датчика струму, які з'єднані з фазами статора асинхронного електродвигуна змінного струму, виходи сьомого і дев'ятого суматорів з'єднані з регуляторами струму по осі d (осі q) відповідно, виходи цих регуляторів з'єднані з першим і другим входом другого координатного перетворювача через другий і четвертий обмежувач, вихід першого координатного перетворювача з'єднаний з входом другого широтно-імпульсного модулятора, вихід якого з'єднаний з керуючим входом автономного інвертора, виходи задавачів струму по осі d (осі q) з'єднані відповідно до другого та першого входу блока визначення кутової частоти поля статора, вихід якого з'єднаний з першим входом десятого суматора, другий вхід якого з'єднаний з датчиком швидкості через масштабуючий блок, вихід десятого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний з четвертим входом першого координатного перетворювача і третім входом другого координатного перетворювача, згідно з корисною моделлю, задавач струму по осі q, представлений задавачем швидкості вихід якого з'єднаний з першим входом восьмого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід восьмого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний з першим входом дев'ятого суматору через третій обмежувач, LC-фільтр з'єднаний з виходом 4qs-перетворювача, та другим датчиком напруги, вихід якого з'єднаний з другим входом першого суматора, на перший вхід якого надходить задане значення напруги ланки постійного струму, вихід першого суматора з'єднаний з входом регулятора напруги ланки постійного струму, вихід якого з'єднаний з першим входом блока множення, другий вхід якого з'єднаний з блоком формування синусоїдального сигналу контуру корекції фази, вхід якого з'єднаний з виходом четвертого суматора, на другий вхід якого надходить задане значення фази, перший вхід четвертого суматора з'єднаний з виходом регулятора фази, вхід якого з'єднаний з виходом третього суматора, на другий вхід якого надходить задане значення фазового зрушення, перший вхід третього суматора з'єднано з виходом другого суматора, перший вхід якого з'єднаний з виходом датчика фази напруги, вхід якого з'єднаний з першим датчиком напруги на вході 4qs-перетворювача, другий вхід суматора з'єднаний з виходом датчика фази струму, вхід якого з'єднаний з першим датчиком струму на вході 4qsперетворювача, який з'єднано з другим входом п'ятого суматора, перший вхід якого з'єднаний з виходом блока множення, вихід п'ятого суматора з'єднаний з входом регулятора струму мережі, вихід якого з'єднаний з першим входом шостого суматора, другий вхід якого з'єднаний з першим датчиком напруги, вихід шостого суматора з'єднаний з першим входом блока ділення, другий вхід якого з'єднаний з другим датчиком напруги, вихід блока ділення з'єднаний з першим широтно-імпульсним модулятором через перший блок обмеження, перший широтно-імпульсний модулятор з'єднаний з керуючим входом 4qs-перетворювача, силовий вхід якого з'єднаний через датчик струму з мережею, з якою з'єднаний перший датчик напруги. Вказані додаткові елементи і зв'язки між ними, а також зміни в порівнянні з найближчим аналогом, дозволяють забезпечити: накопичення енергії, яка виробляється електродвигуном в процесі гальмування на накопичувальний пристрій в ланці постійного струму (регенеративне гальмування), акумулювання та використання для роботи електродвигуна та інвертування надлишкової енергії під час гальмування в мережу при перевищенні допустимого рівня напруги на накопичувальному пристрої. Суть корисної моделі пояснюється кресленням, на якому представлена схема пропонованого пристрою (креслення), яка містить: 1 - 4qs-перетворювач; 2 - ємність LCфільтра; 3 - індуктивність LC-фільтра; 4 - автономний інвертор; 5 - електродвигун змінного струму АД; 6 - другий датчик напруги; 7 - перший суматор; 8 - регулятор напруги ланки постійного струму; 9 - блок множення; 10 - перший датчик напруги; 11 - перший датчик струму; 12 - датчик фази напруги; 13 - датчик фази струму; 14 - другий суматор; 15 - третій суматор; 16 регулятор фази; 17 - четвертий суматор; 18 - блок формування синусоїдального сигналу; 19 п'ятий суматор; 20 - регулятор струму мережі; 21 - шостий суматор; 22 - блок ділення; 23 4 UA 92933 U 5 10 15 20 перший обмежувач; 24 - перший блок широтно-імпульсної модуляції; 25 - другий датчик струму; 26 - третій датчик струму; 27 - четвертий датчик струму; 28 - низькочастотний фільтр; 29 перший координатний перетворювач; 30 - задавач струму по осі d; 31 - сьомий суматор; 32 регулятор струму по осі d; 33 - другий обмежувач; 34 - другий координатний перетворювач; 35 задавач швидкості; 36 - восьмий суматор; 37 - датчик швидкості; 38 - регулятор швидкості; 39 третій обмежувач; 40 - дев'ятий суматор; 41 - регулятор струму по осі q; 42 - четвертий обмежувач; 43 - блок визначення кутової частоти поля статора; 44 - десятий суматор; 45 масштабуючий блок; 46 - інтегратор; 47 - другий блок широтно-імпульсної модуляції; 48 накопичувальний конденсатор. Пристрій працює наступним чином. В режимі руху електроенергія змінного струму від джерела живлення прикладається до вхідного 4qs-перетворювача 1, який перетворює змінну напругу в постійну, і через ланку постійного струму, де знаходиться LC-фільтр Lф 2, Сф 3, для зменшення впливу вищих гармонійних складових, енергія надходить в автономний інвертор 4. Електроенергія з інвертора живить тяговий електродвигун змінного струму АД 5. Пристрій містить систему керування тяговими перетворювачами, яку можна функціонально розділити на 2 частини: система керування 4qs-перетворювачем та система керування автономним інвертором. Система керування 4qs-перетворювачем виконана у вигляді триконтурної контурної системи автоматичного регулювання (CAP), підтримуючої задані значення регульованих величин. Основною величиною є напруга ланки постійного струму Ud . Регулювання напруги здійснює зовнішній контур, в який входить другий датчик напруги 6 Ud , сигнал з якого надходить на перший суматор 7, де від нього віднімається задане значення Ud . Отриманий сигнал надходить на регулятор напруги Ud 8, який видає сигнал Ic max амплітуди заданого струму. 25 Далі Ic max надходить на блок множення 9, де множиться на синусоїдальний сигнал, що надходить з контуру корекції фази. Контур корекції фази формується з першого датчика напруги 10 та першого датчика струму 11, сигнали з яких потрапляють на датчики фази напруги Uм 12 і датчики фази струму Iм 13 відповідно, де формуються сигнали фазового зрушення I та U . Отриманий сигнал з датчика фази Uм надходить на другий суматор 14, де від нього 30 віднімається сигнал з датчика фази Iм . Отриманий сигнал надходить на третій суматор 15 з від'ємним знаком, де до нього додається задане значення фазового зрушення . На виході третього суматора 15 видається сигнал неузгодженості між і фактичним фазовим зрушенням , який надходить до регулятора фази 16, де відбувається перетворення в c . Hp k p 35 40 k i p c (1) Отриманий сигнал c надходить на четвертий суматор 17, де до нього додається заданий сигнал t . Сигнал на виході четвертого суматора 17 надходить в блок 18, що формує синусоїдальний сигнал. Сигнал Iм , який отримується з блока множення, надходить на п'ятий суматор 19, де від нього віднімається сигнал першого датчика струму 11. На виході п'ятого суматора 19 видається сигнал неузгодженості I між Iм і фактичним струмом Iм вимірюваним першим датчиком струму 11, який надходить до регулятора струму Iм 20, де відбувається перетворення I в U4qs . HpIc k Icp k Ici U4qS p I (2) Після цього отриманий сигнал U4qs надходить на шостий суматор 21 з від'ємним знаком, 45 де до нього додається напруга Uм отримана з першого датчика напруги 10, а на виході отримується похибка напруги 4qs-перетворювача U4qs . Далі U4qs надходить до блока ділення 5 UA 92933 U ref 22, де це значення ділиться на сигнал з другого датчика напруги 6, отриманий сигнал uqr надходить на перший обмежувач 23. Сигнал на виході першого обмежувача 23 перетворюється в модулюючу функцію і надходить у блок, що забезпечує керування ключами перетворювача першого широтно-імпульсного модулятора 24, за формулами: Опорна напруга: 2 (3) arctgtg t mod 2 t 2 Обмеження вихідної напруги формується наступним чином: Ucarr 5 Uв 10 1 при Ucarr Uref qr 0 при Ucarr Uref qr (4) Система керування автономним інвертором виконана у вигляді системи керування з непрямою орієнтацією за полем. Основними параметрами системи керування є фазні струми в статорній обмотці двигуна IA , IB , IC , які контролюються другим, третім та четвертим датчиками струму 25-27. Сигнали з цих датчиків надходять на низькочастотний фільтр другого порядку 28, який забезпечує фільтрацію пульсацій вищих гармонік струму статора. Після фільтрації сигнали струму подаються на блок першого координатного перетворювача 29, де перехід від трифазної нерухомої відносно статора системи координат abc до обертової разом з ротором dq відбувається за виразами: 2 Id 3 IA cos IB cos 120 IC cos 120 2 Iq IA sin IB sin 120 IC sin 120 (5) 3 1 I0 IA IB IC 3 15 20 Змінні Id , Iq , I0 прийнято називати реактивним, активним, і нульовим струмом статора для симетричних режимів, а при з'єднані обмоток в зірку з ізольованою нейтраллю і для не симетричних режимів, причому I0 0 . Формування широтно-імпульсної модуляції для автономного інвертора забезпечується двома контурами регулювання: реактивної складової статорного струму та швидкості обертання двигуна. Заданий сигнал реактивної складової струму Id з задавача струму Id 30 надходить на сьомий суматор 31, де від нього віднімається сигнал блока першого координатного перетворювача 31 Id . Після цього перетворення сигнал надходить на регулятор струму Id 32 Tsp 1 U k k p i d (6) 2Tкс k nчk c / R s p p Id та другий обмежувач 33, який обмежує амплітуду сигналу. Сформований сигнал після другого обмежувача 33 надходить на блок другого координатного перетворювача 34. Hpc В цей же час, заданий сигнал швидкості n r з задавача швидкості 35 надходить на восьмий 25 суматор 36, де від нього віднімається сигнал датчика швидкості 37 ротора двигуна n r . Після цього, отриманий сигнал надходить на регулятор швидкості 38 Hpш JL r k c 4Tкшp 1 I k q k wp wi 3 p n 12ZpLmk шTкшp (7) і третій обмежувач 39. Сформований сигнал активної складової струму Iq надходить на дев'ятий суматор 40, де від нього віднімається сигнал блока першого координатного перетворювача 29 Iq . Після цього перетворення сигнал надходить на регулятор струму Iq 41 Hpc 30 U Tsp 1 k q kp i 2Tксk nчk c / Rs p p Iq (8) та четвертий обмежувач 42, який обмежує амплітуду сигналу, і передає сигнал на блок другого координатного перетворювача 34, який виконує перетворення поточних напруг статора із обертової системи координат dq в трифазну нерухому відносно статора систему координат abc за системою рівнянь: 6 UA 92933 U uref u d cos u q sin a.qr 2 2 ref u q sin (9) ub.qr u d cos 3 3 uref ua ub c.qr Сигнали реактивної Id та активної Iq складової струму надходять до блока визначення кутової частоти поля статора s 43, де відбуваються перетворення у відповідності з наступним співвідношенням: I R s d 2 (10) Iq L 2 5 10 Після цього сигнал кутової частоти поля статора s надходить на десятий суматор 44, де до нього додається сигнал з датчика швидкості 37 ротора двигуна n r перемножений на значення масштабуючого блока 45. Далі отриманий сигнал надходить на інтегратор 46, де формується сигнал , який надходить на входи 3 та 4, відповідно другого 29 та першого 34 координатного перетворювача. На вхід другого блока широтно-імпульсної модуляції 47 надходить задана напруга двигуна uref .qr і робота цього блока описується формулами: abc Опорна напруга: 2 (11) arctgtg t mod 2 t 2 Вихідна напруга по фазі А формується наступним чином: Ucarr Uв их 15 20 1 при Ucarr Uref a.qr 0 при Ucarr Uref a.qr (12) Вихідні напруги по фазі В і С формується аналогічно. В режимі регенеративного гальмування електродвигун змінного струму 5 переводиться в генераторний режим і генерує електроенергію змінного струму. Згенерована енергія від електродвигуна надходить до автономного інвертора 4 (який в режимі рекуперативного гальмування працює як випрямляч), де вона перетворюється в електроенергію постійного струму і надходить до накопичувального конденсатора 48, який знаходиться в ланці постійного струму. При перевищенні допустимого рівня напруги в ланці постійного струму надлишкова енергія гальмування через 4qs-перетворювач 1 віддається в мережу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 Пристрій векторного керування для електродвигуна змінного струму для забезпечення режимів руху та регенеративного гальмування, що містить ланцюг LC-фільтра, що включає в себе індуктивність і ємність у ланці постійного струму, накопичувальний конденсатор, автономний інвертор, що перетворює напругу на конденсаторі у змінну напругу з певною частотою, асинхронний електродвигун змінного струму, з'єднаний з датчиком швидкості, систему керування автономним інвертором, яка складається з задавачів струму по осі d (осі q), які виходами з'єднані з першими входами сьомого і дев'ятого суматора відповідно, до других входів яких з'єднані другий і перший вихід першого координатного перетворювача, входи якого з'єднані з входом низькочастотного фільтра, виходи якого з'єднані з виходом другого, третього та четвертого датчика струму, які з'єднані з фазами статора асинхронного електродвигуна змінного струму, виходи сьомого і дев'ятого суматорів з'єднані з регуляторами струму по осі d (осі q) відповідно, виходи цих регуляторів з'єднані з першим і другим входом другого координатного перетворювача через другий і четвертий обмежувач, вихід першого координатного перетворювача з'єднаний з входом другого широтно-імпульсного модулятора, вихід якого з'єднаний з керуючим входом автономного інвертора, виходи задавачів струму по осі d (осі q) з'єднані відповідно до другого та першого входу блока визначення кутової частоти поля статора, вихід якого з'єднаний з першим входом десятого суматора, другий вхід якого з'єднаний з датчиком швидкості через масштабуючий блок, вихід десятого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний з четвертим входом першого координатного перетворювача і третім входом другого координатного перетворювача, який відрізняється тим, що задавач струму по осі q, представлений задавачем швидкості, вихід якого з'єднаний з 7 UA 92933 U 5 10 15 20 першим входом восьмого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід восьмого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний з першим входом дев'ятого суматора через третій обмежувач, LC-фільтр з'єднаний з виходом 4qsперетворювача, та другим датчиком напруги, вихід якого з'єднаний з другим входом першого суматора, на перший вхід якого надходить задане значення напруги ланки постійного струму, вихід першого суматора з'єднаний з входом регулятора напруги ланки постійного струму, вихід якого з'єднаний з першим входом блока множення, другий вхід якого з'єднаний з блоком формування синусоїдального сигналу контуру корекції фази, вхід якого з'єднаний з виходом четвертого суматора, на другий вхід якого надходить задане значення фази, перший вхід четвертого суматора з'єднаний з виходом регулятора фази, вхід якого з'єднаний з виходом третього суматора, на другий вхід якого надходить задане значення фазового зрушення, перший вхід третього суматора з'єднано з виходом другого суматора, перший вхід якого з'єднаний з виходом датчика фази напруги, вхід якого з'єднаний з першим датчиком напруги на вході 4qs-перетворювача, другий вхід суматора з'єднаний з виходом датчика фази струму, вхід якого з'єднаний з першим датчиком струму на вході 4qs-перетворювача, який з'єднано з другим входом п'ятого суматора, перший вхід якого з'єднаний з виходом блока множення, вихід п'ятого суматора з'єднаний з входом регулятора струму мережі, вихід якого з'єднаний з першим входом шостого суматора, другий вхід якого з'єднаний з першим датчиком напруги, вихід шостого суматора з'єднаний з першим входом блока ділення, другий вхід якого з'єднаний з другим датчиком напруги, вихід блока ділення з'єднаний з першим широтно-імпульсним модулятором через перший блок обмеження, перший широтно-імпульсний модулятор з'єднаний з керуючим входом 4qs-перетворювача, силовий вхід якого з'єднаний через датчик струму з мережею, з якою з'єднаний перший датчик напруги. 8 UA 92933 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори англійськоюBialobrezhskyi Oleksii Volodymyrovych
Автори російськоюБялобржеский Алексей Владимирович
МПК / Мітки
МПК: H02P 21/00, B60L 7/00
Мітки: режимів, керування, струму, гальмування, електродвигуна, забезпечення, пристрій, змінного, векторного, регенеративного, руху
Код посилання
<a href="https://ua.patents.su/11-92933-pristrijj-vektornogo-keruvannya-dlya-elektrodviguna-zminnogo-strumu-dlya-zabezpechennya-rezhimiv-rukhu-ta-regenerativnogo-galmuvannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій векторного керування для електродвигуна змінного струму для забезпечення режимів руху та регенеративного гальмування</a>
Пристрій електроживлення змінного струму
Номер патенту: 11829
Опубліковано: 16.01.2006
Автори: Зимовін Анатолій Якович, Резнікова Ольга Вікторівна, Резніков Олександр Володимирович
МПК: H02M 5/00
Мітки: струму, змінного, електроживлення, пристрій
Формула / Реферат:
Пристрій електроживлення змінного струму, що містить першу та другу вхідні клеми, перший та другий комутатори, блок керування та пристрій для введення живлення до магістралі, який відрізняється тим, що введено перший та другий датчики струму, перший та другий датчики напруги, перший та другий блоки порівняння, перший та другий трансформатори, третю та четверту вхідні клеми, третій та четвертий комутатори, другий блок керування, другий...
Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача
Номер патенту: 30472
Опубліковано: 25.02.2008
Автори: Волков Олександр Васильович, Волков Володимир Олександрович
МПК: H02P 7/00, H02P 21/00
Мітки: спосіб, трифазного, змінного, перетворювача, чотириквадрантного, векторного, стороні, струму, регулювання
Формула / Реферат:
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, що полягає в тому, що контролюють фазні електрорушійну силу (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис і ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС і прогнозовані значення проекцій узагальненого вектора...
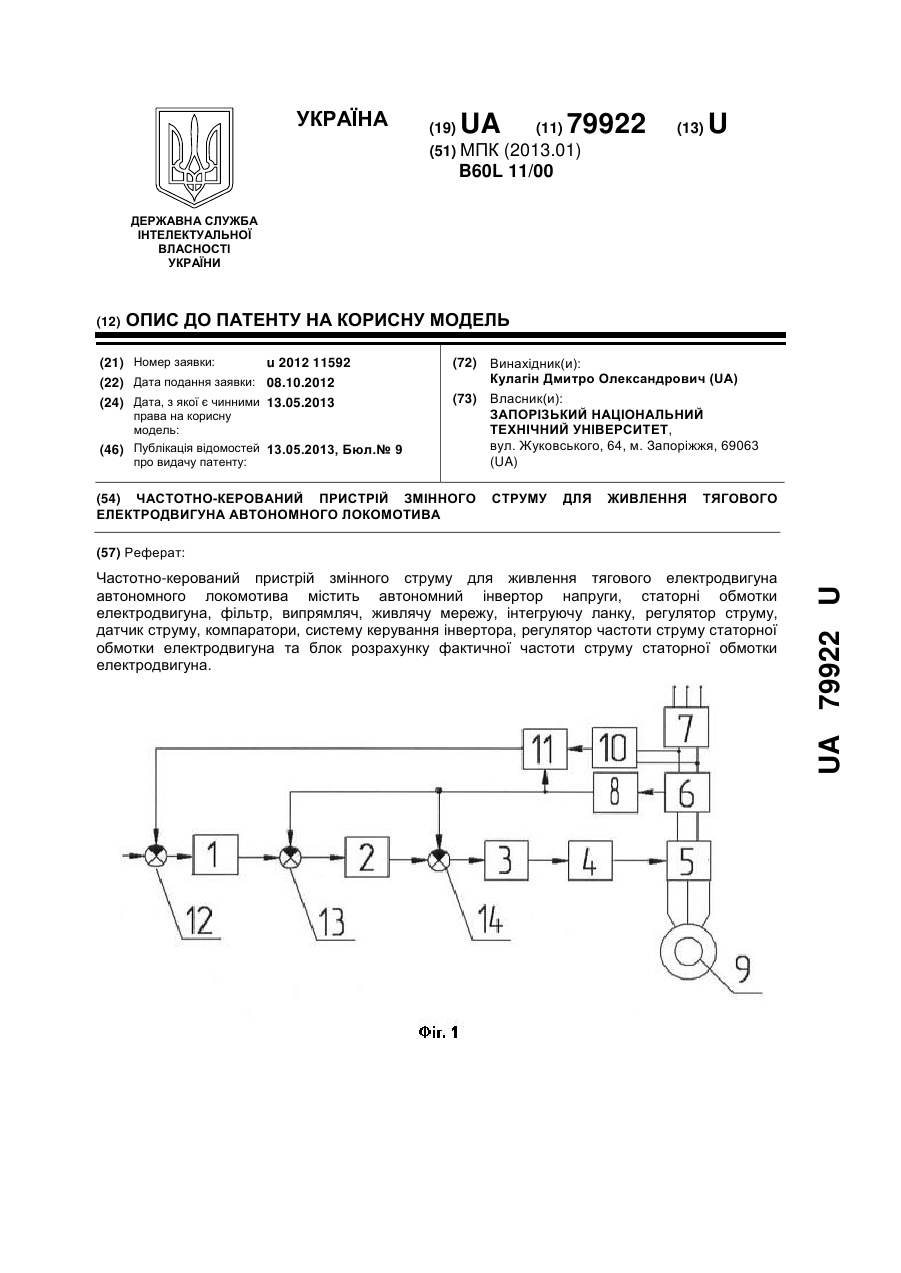
Частотно-керований пристрій змінного струму для живлення тягового електродвигуна автономного локомотива
Номер патенту: 79922
Опубліковано: 13.05.2013
Автор: Кулагін Дмитро Олександрович
МПК: B60L 11/00
Мітки: тягового, частотно-керований, автономного, живлення, локомотива, пристрій, електродвигуна, струму, змінного
Формула / Реферат:
Частотно-керований пристрій змінного струму для живлення тягового електродвигуна автономного локомотива, що містить автономний інвертор напруги, вихід якого підключено до статорних обмоток електродвигуна, а на вході якого встановлено фільтр, який підключено до виходу випрямляча, вхід якого підключено до живлячої мережі, інтегруючу ланку, вихід якої підключено до регулятора струму, вхід якого підключено до датчика струму, вихід якого...
Пристрій для регулювання швидкості електродвигуна змінного струму

Номер патенту: 55755
Опубліковано: 27.12.2010
Автори: Качур Олександр Сергійович, Кулагін Дмитро Олександрович, Андрієнко Петро Дмитрович
МПК: H02P 5/00
Мітки: швидкості, електродвигуна, змінного, струму, регулювання, пристрій
Формула / Реферат:
Пристрій для регулювання швидкості електродвигуна змінного струму, що містить автономний інвертор напруги, вихід якого підключено до статорних обмоток електродвигуна, а на вході якого встановлено фільтр, який підключено до виходу випрямляча, вхід якого підключено до живильної мережі, інтегруючу ланку, вхід якої підключено до вузла задання, а вихід якої підключено до регулятора струму, вхід якого підключено до датчика струму, який...
Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача
Номер патенту: 44892
Опубліковано: 26.10.2009
Автори: Волков Олександр Васильович, Волков Володимир Олександрович, Антонов Микола Леонідович
МПК: H02P 21/00, H02P 7/00
Мітки: змінного, регулювання, трифазного, стороні, струму, векторного, перетворювача, чотириквадрантного, спосіб
Формула / Реферат:
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, який полягає в тому, що контролюють фазні електрорушійні сили (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис й ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС та прогнозовані значення проекцій узагальненого...
Попередній патент: Пристрій адаптивного керування релейним регулятором струму трифазного силового активного фільтра
Наступний патент: Пристрій регулювання збудження синхронного двигуна в динамічних режимах
Випадковий патент: Процес визначення у хворих на цукровий діабет груп ризику щодо розвитку тяжких кінцевих наслідків хвороби