Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача
Номер патенту: 30472
Опубліковано: 25.02.2008
Автори: Волков Олександр Васильович, Волков Володимир Олександрович
Формула / Реферат
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, що полягає в тому, що контролюють фазні електрорушійну силу (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис і ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС і прогнозовані значення проекцій узагальненого вектора напруги, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, обчислюють у вигляді різниці проекцій узагальненого вектора ЕРС і узагальненого вектора напруги на відповідні осі даної ортогональної координатної системи прогнозовані значення проекцій результуючого вектора напруги при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі зазначеної ортогональної координатної системи узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, вісь абсцис згаданої ортогональної координатної системи приймають за вісь відліку аргументів узагальнених векторів, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення прогнозуючого функціонала, при цьому з розрахованих значень прогнозуючого функціонала знаходять його екстремальне значення й визначають нову комбінацію відкритих і закритих силових ключів перетворювача, що відповідає зазначеному екстремальному значенню функціонала, обчислюють у вигляді кореня квадратного із суми квадратів згаданих відхилень проекцій струму модуль узагальненого вектора відхилення струму, що порівнюють із установленою величиною, причому, якщо обчислене значення зазначеного модуля узагальненого вектора відхилення струму не перевищує установленої величини, то зберігають колишню комбінацію відкритих і закритих силових ключів перетворювача, а якщо воно перевищує встановлену величину, то задають нову комбінацію відкритих і закритих силових ключів даного перетворювача, який відрізняється тим, що додатково у вигляді відношень відхилень проекцій струму на осі абсцис і ординат ортогональної координатної системи до модуля узагальненого вектора відхилення струму визначають значення відповідно косинуса й синуса від аргументу цього вектора, для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують в вигляді кореня квадратного із суми квадратів його проекцій значення модуля результуючого вектора напруги, у вигляді відношень проекцій результуючого вектора напруги на осі абсцис і ординат ортогональної координатної системи до його модуля обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення відповідно косинуса й синуса від аргументу цього вектора, при цьому прогнозуючий функціонал розраховують у вигляді двох доданків, перший з яких являє собою добуток косинусів від аргументів результуючого вектора напруги й узагальненого вектора відхилення струму, а другий доданок - добуток синусів від аргументів тих же векторів.
2. Спосіб за п. 1, який відрізняється тим, що додатково контролюють кутову частоту обертання ортогональної координатної системи й проекції на її осі узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, при цьому проекцію результуючого вектора напруги на вісь абсцис знаходять за додатковим відрахуванням різниці двох доданків, перший з яких являє собою добуток активного опору фази змінного струму перетворювача на значення проекції узагальненого вектора струму на вісь абсцис, а другий доданок - добуток індуктивності фази змінного струму перетворювача на кутову частоту обертання координатної системи й на проекцію узагальненого вектора струму на вісь ординат, проекцію результуючого вектора напруги на вісь ординат визначають за додатковим відрахуванням суми двох доданків, перший з яких являє собою добуток активного опору фази змінного струму перетворювача на значення проекції узагальненого вектора струму на вісь ординат, а другий доданок - добуток індуктивності фази змінного струму перетворювача на кутову частоту обертання координатної системи й на проекцію узагальненого вектора струму на вісь абсцис зазначеної ортогональної координатної системи.
3. Спосіб за п. 1, який відрізняється тим, що додатково до сторони змінного струму чотириквадрантного перетворювача подають живлення безпосередньо або через реактори від джерела трифазної напруги мережі, а як згадані фазні значення ЕРС контролюють фазні напруги зазначеного джерела трифазної напруги мережі.
4. Спосіб за п. 1, який відрізняється тим, що додатково від джерела постійної напруги подають живлення до сторони постійного струму чотириквадрантного перетворювача, у якому сторону змінного струму навантажують на асинхронний короткозамкнений двигун, при цьому як ЕРС контролюють наведені до статора фазні ЕРС ротора зазначеного двигуна, кожну з яких обчислюють у вигляді суми трьох доданків, перший з яких являє собою відповідну фазну напругу, контрольовану на стороні змінного струму перетворювача, другий доданок розраховують у вигляді добутку активного опору статора двигуна на значення струму, контрольованого на стороні змінного струму в даній фазі перетворювача, а третій доданок визначають у вигляді добутку похідної за часом від цього струму на значення сумарної індуктивності розсіювання статора й ротора двигуна.
5. Спосіб за п. 1, який відрізняється тим, що згадану ортогональну координатну систему задають нерухомою з орієнтацією осі абсцис по геометричній осі обмотки, що створює ЕРС у фазі "а" на стороні змінного струму перетворювача, контролюють ЕРС і струми у двох фазах "а" і "b" на стороні змінного струму чотириквадрантного перетворювача, визначають проекції узагальнених векторів ЕРС і струму на вісь абсцис нерухомої ортогональної координатної системи у вигляді значення відповідно ЕРС або струму у фазі "а", обчислюють проекції цих векторів на вісь ординат зазначеної координатної системи у вигляді поділеної на V3 суми двох доданків, перший з яких являє собою значення відповідно ЕРС або струму у фазі "а", а другий доданок - подвоєне значення відповідно ЕРС або струму у фазі "b", при цьому контрольовані відхилення між заданими й фактичними значеннями проекцій узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, розраховують у вигляді різниці заданих і обчислених значень проекцій цього узагальненого вектора на відповідні осі абсцис або ординат нерухомої ортогональної координатної системи.
Текст
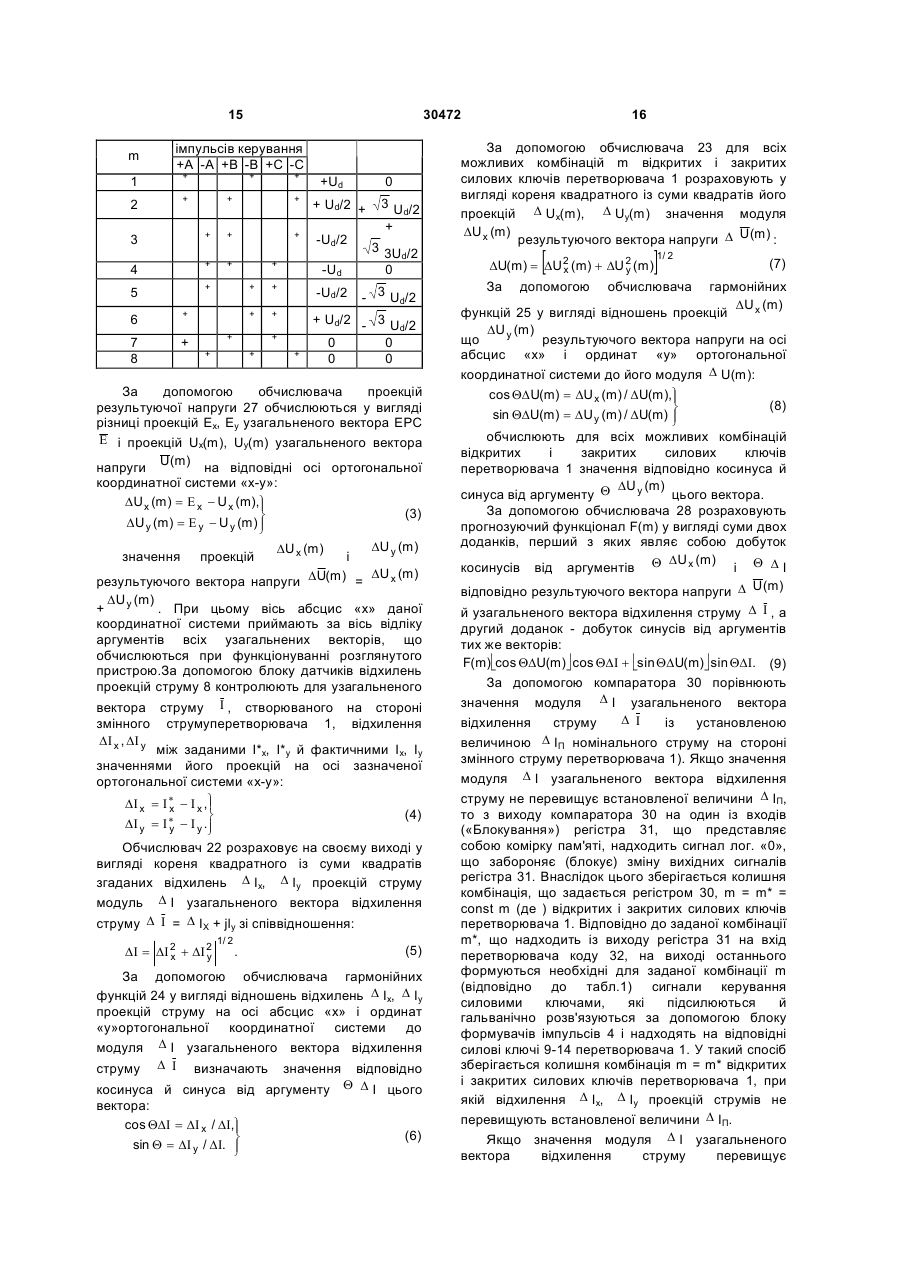
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, що полягає в тому, що контролюють фазні електрорушійну силу (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис і ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС і прогнозовані значення проекцій узагальненого вектора напруги, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, обчислюють у вигляді різниці проекцій узагальненого вектора ЕРС і узагальненого вектора напруги на відповідні осі даної ортогональної координатної системи прогнозовані значення проекцій результуючого вектора напруги при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі зазначеної ортогональної координатної системи узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, вісь абсцис згаданої ортогональної координатної системи приймають за вісь відліку аргументів узагальнених векторів, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення прогнозуючого функціонала, при цьому з розрахованих значень прогнозуючого функціонала знаходять його екстремальне значення й визначають нову комбінацію відкритих і закритих силових ключів перетворювача, що відповідає зазначеному екстремальному значенню функціонала, обчислюють у вигляді кореня квадратного із суми квадратів згаданих відхилень проекцій струму 2 (19) 1 3 30472 4 частоту обертання координатної системи й на проекцію узагальненого вектора струму на вісь ординат, проекцію результуючого вектора напруги на вісь ординат визначають за додатковим відрахуванням суми двох доданків, перший з яких являє собою добуток активного опору фази змінного струму перетворювача на значення проекції узагальненого вектора струму на вісь ординат, а другий доданок - добуток індуктивності фази змінного струму перетворювача на кутову частоту обертання координатної системи й на проекцію узагальненого вектора струму на вісь абсцис зазначеної ортогональної координатної системи. 3. Спосіб за п. 1, який відрізняється тим, що додатково до сторони змінного струму чотириквадрантного перетворювача подають живлення безпосередньо або через реактори від джерела трифазної напруги мережі, а як згадані фазні значення ЕРС контролюють фазні напруги зазначеного джерела трифазної напруги мережі. 4. Спосіб за п. 1, який відрізняється тим, що додатково від джерела постійної напруги подають живлення до сторони постійного струму чотириквадрантного перетворювача, у якому сторону змінного струму навантажують на асинхронний короткозамкнений двигун, при цьому як ЕРС контролюють наведені до статора фазні ЕРС ротора зазначеного двигуна, кожну з яких обчислюють у вигляді суми трьох доданків, перший з яких являє собою відповідну фазну напругу, контрольовану на стороні змінного струму перетворювача, другий доданок розраховують у вигляді добутку активного опору статора двигуна на значення струму, контрольованого на стороні змінного струму в даній фазі перетворювача, а третій доданок визначають у вигляді добутку похідної за часом від цього струму на значення сумарної індуктивності розсіювання статора й ротора двигуна. 5. Спосіб за п. 1, який відрізняється тим, що згадану ортогональну координатну систему задають нерухомою з орієнтацією осі абсцис по геометричній осі обмотки, що створює ЕРС у фазі "а" на стороні змінного струму перетворювача, контролюють ЕРС і струми у двох фазах "а" і "b" на стороні змінного струму чотириквадрантного перетворювача, визначають проекції узагальнених векторів ЕРС і струму на вісь абсцис нерухомої ортогональної координатної системи у вигляді значення відповідно ЕРС або струму у фазі "а", обчислюють проекції цих векторів на вісь ординат зазначеної координатної системи у вигляді поділеної на V3 суми двох доданків, перший з яких являє собою значення відповідно ЕРС або струму у фазі "а", а другий доданок - подвоєне значення відповідно ЕРС або струму у фазі "b", при цьому контрольовані відхилення між заданими й фактичними значеннями проекцій узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, розраховують у вигляді різниці заданих і обчислених значень проекцій цього узагальненого вектора на відповідні осі абсцис або ординат нерухомої ортогональної координатної системи. Корисна модель відноситься до області електротехніки, конкретно - до активних фільтрів і частотно-регульованих асинхронних електроприводів, у яких відповідно як активний випрямляч або автономний інвертор напруги використовується трифазний чотириквадрантний перетворювач із широтно-імпульсною модуляцією. Векторне регулювання змінного струму чотириквадрантного перетворювача призначено для формування фазних струмів на стороні змінного струму зазначеного перетворювача як по амплітуді, так і по частоті й фазі, і полягає у відпрацьовуванні заданих значень проекцій (на осі нерухомої або обертової ортогональної координатної системи) узагальненого вектора струму, створюваного на стороні змінного струму даного перетворювача. Векторне регулювання струму на стороні змінного струму чотириквадратного перетворювача служить: в активних фільтрах - для стабілізації на заданому рівні напруги на стороні постійного струму й формування бажаного значення коефіцієнта потужності на стороні змінного струму зазначеного перетворювача, а в частотно-регульованих електроприводах - для стабілізації в динамічних і сталих режимах заданих значень потокозчеплення електромагнітного моменту асинхронного двигуна, що одержує живлення від сторони змінного струму трифазного чотириквадрантного перетворювача. Відомий з [1] спосіб оптимального по швидкодії векторного регулювання статорного струму асинхронного двигуна, що живиться від автономного інвертора напруги, виконаного у вигляді трифазного чотириквадрантного перетворювача, що полягає в тому, що контролюють напругу на стороні постійного струму й фазні струми на стороні змінного струму зазначеного перетворювача, через які розраховують на осі абсцис і ординат нерухливої ортогональної координатної системи проекції узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, і обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів чотириквадрантного перетворювача прогнозовані значення проекцій на зазначені осі координатної системи узагальненого вектора напруги, створюваного на стороні змінного струму перетворювача, за допомогою моделі асинхронного двигуна через обчислені значення проекцій узагальнених векторів напруг і струму на стороні змінного струму перетворювача визначають на осі нерухомої ортогональної координатної системи проекції наведених до статора узагальнених векторів ЕРС ротора й 5 потокозчеплення ротора двигуна, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача прогнозовані значення проекцій результуючого вектора напруги на осі нерухомої ортогональної координатної системи у вигляді різниці відповідних проекцій на осі абсцис і ординат цієї координатної системи узагальненого вектора напруги, створюваного на стороні змінного струму перетворювача, і узагальненого вектора ЕРС ротора двигуна, знаходять у вигляді кореня квадратного із суми квадратів його проекцій значення модуля узагальненого вектора потокозчеплення ротора двигуна, обчислюють у вигляді відносин проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи до його модуля значення відповідно косинуса і синуса від аргументу узагальненого вектора потокозчеплення ротора двигуна, за допомогою останніх значень розраховують проекції узагальненого вектора струму й результуючого вектора напруги на осі обертової ортогональної координатної системи, зв'язаної віссю абсцис із узагальненим вектором потокозчеплення ротора двигуна, визначають відхилення між модулем, проекціями на осі обертової ортогональної координатної системи і їх відповідними заданими значеннями, причому, якщо указані відхилення для модуля й проекцій узагальненого вектора струму не перевищують установленої величини, то зберігають колишню комбінацію відкритих і закритих силових ключів перетворювача, а якщо перевищують установлену величину, то - задають нову комбінацію відкритих і закритих силових ключів даного перетворювача, що задовольняє таким умовам: по-перше, збігаються знаки відхилень проекцій узагальненого вектора струму зі знаками проекцій на відповідні осі обертової координатної системи узагальненого вектора результуючої напруги, і по-друге, при зазначеній новій комбінації відкритих і закритих силових ключів перетворювача дорівнює екстремальному значенню проекція результуючого вектора напруги на вісь ординат обертової ортогональної координатної системи. Поряд з високою швидкодією, що досягається, векторного відпрацьовування струму, недоліком відомого способу є підвищена частота перемикання (до 5-10кГц і вище) силових ключів чотириквадрантного перетворювача (у тому числі у стаціонарних режимах роботи електропривода), що викликає на практиці збільшення динамічних втрат у силових ключах даного перетворювача. Це, у свою чергу, економічно невиправдано для більшості частотно-регульованих асинхронних електроприводів середньої (понад 100 кВт) і великої (понад 1000 кВт) потужності, до яких звичайно не пред'являються підвищені вимоги по швидкодії відпрацьовування струму, але дуже важливі й актуальні питання енергозбереження. Найбільш близьким по технічній сутності до запропонованого способу обраний спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача з [2], що полягає в тому, що контролюють фазні ЕРС (сіткові напруги) на 30472 6 стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис і ординат нерухомої ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС і прогнозовані значення проекцій узагальненого вектора напруги (проти-ЕРС), створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, обчислюють у вигляді різниці проекцій узагальненого вектора ЕРС і узагальненого вектора напруги на відповідні осі нерухливої ортогональної координатної системи прогнозовані значення проекцій результуючого вектора напруги при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють фазні струми на стороні змінного струму перетворювача, через які визначають на осі абсцис і ординат нерухомої ортогональної координатної системи проекції узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, через обчислені проекції узагальненого вектора ЕРС на осі нерухомої ортогональної координатної системи розраховують тригонометричні функції косинуса й синуса від аргументу узагальненого вектора ЕРС, за допомогою зазначених тригонометричних функцій через проекції узагальненого вектора струму на осі нерухомої ортогональної координатної системи обчислюють із прямих координатних співвідношень проекції узагальненого вектора струму на осі абсцис і ординат обертової ортогональної координатної системи, орієнтованою віссю абсцис по узагальненому векторі ЕРС, контролюють відхилення між заданими й обчисленими значеннями проекцій узагальненого вектора струму на осі абсцис і ординат зазначеної обертової ортогональної координатної системи, за допомогою певних тригонометричних функцій косинуса й синуса від аргументу узагальненого вектора струму на осі обертової ортогональної системи обчислюють зі зворотних координатних співвідношень значення даних відхилень проекцій узагальненого вектора струму на осі абсцис і ординат нерухомої ортогональної координатної системи, через проекції результуючого вектора напруги на осі нерухомої ортогональної координатної системи розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача у вигляді кореня квадратного із суми квадратів даних проекцій значення модуля зазначеного вектора й обчислюють прогнозовані значення його аргументу, через згадані відхилення проекцій узагальненого вектора струму на осі нерухомої ортогональної координатної системи розраховують у вигляді кореня квадратного із суми квадратів цих відхилень проекцій значення модуля узагальненого вектора відхилення струму й обчислюють його аргумент, при цьому вісь абсцис нерухомої ортогональної координатної системи приймають за вісь відліку аргументів узагальнених векторів, для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача 7 розраховують у вигляді різниці значень аргументу прогнозованого результуючого вектора напруги й аргументу узагальненого вектора відхилення струму значення прогнозуючого функціонала, з даних розрахованих значень прогнозуючого функціонала знаходять його оптимальне значення й визначають нову комбінацію відкритих і закритих силових ключів перетворювача, що відповідає зазначеному оптимальному значенню функціонала, порівнюють обчислене значення модуля узагальненого вектора відхилення струму із установленою величиною, причому, якщо значення модуля узагальненого вектора відхилення струму не перевищує встановленої величини, то зберігають колишню комбінацію відкритих і закритих силових ключів перетворювача, а якщо перевищує встановлену величину, то задають нову комбінацію відкритих і закритих силових ключів перетворювача. Недоліком відомого способу є істотна технічна складність його практичної реалізації. Вона обумовлена, головним чином, складністю здійснення операцій обчислення аргументів узагальнених векторів (результуючої напруги й відхилення струму), що вимагають: по-перше, реалізації в обчислювачі складних нелінійних математичних операцій типу «arctg» або «arcsin» [3]; по-друге, знаходження аргументів узагальнених векторів у всіх чотирьох квадрантах на площині; і, по-третє, вживання спеціальних заходів по виключенню неоднозначності при визначенні зазначених аргументів (пов'язаної з періодичністю їхньої зміни, рівної 2 p ) і при знаходженні оптимального співвідношення (різниці) між аргументами двох згаданих векторів (що служить у відомому способі прогнозуючим функціоналом). В основі корисної моделі поставлене завдання розробки більш простого в технічній реалізації способу векторного регулювання струму трифазного чотириквадрантного перетворювача, за допомогою якого забезпечується здешевлення активних фільтрів і частотно-регульованих асинхронних електроприводів при збереженні високої якості регулювання струму в зазначених пристроях. Рішення даного завдання досягається тим, що в способі векторного регулювання струму на стороні змінного струму трифазного чотири квадрантного перетворювача, що полягає в тому, що контролюють фазні електрорушійна сила (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис і ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС і прогнозовані значення проекцій узагальненого вектора напруги, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, обчислюють у вигляді різниці проекцій узагальненого вектора ЕРС і узагальненого вектора напруги на відповідні осі даної ортогональної координатної системи прогнозовані значення проекцій результуючого вектора напруги 30472 8 при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі зазначеної ортогональної координатної системи узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, вісь абсцис згаданої ортогональної координатної системи приймають за вісь відліку аргументів узагальнених векторів, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення прогнозуючого функціонала, при цьому з розрахованих значень прогнозуючого функціонала знаходять його екстремальне значення й визначають нову комбінацію відкритих і закритих силових ключів перетворювача, що відповідає зазначеному екстремальному значенню функціонала, обчислюють у вигляді кореня квадратного із суми квадратів згаданих відхилень проекцій струму модуль узагальненого вектора відхилення струму, що порівнюють із установленою величиною, якщо обчислене значення зазначеного модуля узагальненого вектора відхилення струму не перевищує установленої величини, то зберігають колишню комбінацію відкритих і закритих силових ключів перетворювача, а якщо воно перевищує встановлену величину, то задають нову комбінацію відкритих і закритих силових ключів даного перетворювача, яка відрізняється тим, що додатково у вигляді відносин відхилень проекцій струму на осі абсцис і ординат ортогональної координатної системи до модуля узагальненого вектора відхилення струму визначають значення відповідно косинуса і синуса від аргументу цього вектора, для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують в виді кореня квадратного із суми квадратів його проекцій значення модуля результуючого вектора напруги, у вигляді відносин проекцій результуючого вектора напруги на осі абсцис і ординат ортогональної координатної системи до його модуля обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення відповідно косинусай синуса від аргументу цього вектора, при цьому прогнозуючий функціонал розраховують у вигляді двох доданків, перший з яких являє собою добуток косинусів від аргументів результуючого вектора напруги й узагальненого вектора відхилення струму, а другий доданок добуток синусів від аргументів тих же векторів. Для підвищення точності векторного регулювання струму в способі по п.1 додатково контролюють кутову частоту обертання ортогональної координатної системи й проекції на її осі узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, при цьому проекцію результуючого вектора напруги на вісь абсцис знаходять за додатковим відрахуванням різниці двох доданків, перший з яких являє собою добуток активного опору фази змінного струму перетворювача на значення проекції узагальненого вектора струму на вісь абсцис, а другий доданок - добуток індуктивності 9 фази змінного струму перетворювача на кутову частоту обертання координатної системи й на проекцію узагальненого вектора струму на вісь ординат, проекцію результуючого вектора напруги на вісь ординат визначають за додатковим відрахуванням суми двох доданків, перший з яких являє собою добуток активного опору фази змінного струму перетворювача на значення проекції узагальненого вектора струму на вісь ординат, а другий доданок - добуток індуктивності фази змінного струму перетворювача на кутову частоту обертання координатної системи й на проекцію узагальненого вектора струму на вісь абсцис зазначеної ортогональної координатної системи. Для застосування запропонованого способу векторного регулювання струму в активних фільтрах у способі по п.1 додатково до сторони змінного струму чотириквадрантного перетворювача подають живлення безпосередньо або через реактори від джерела трифазної напруги мережі, а в якості згаданих фазних значень ЕРС контролюють фазні напруги зазначеного джерела трифазної напруги мережі. Для використання запропонованого способу векторного регулювання струму в частотнорегульованих асинхронних електроприводах у способі по п.1 додатково від джерела постійної напруги подають живлення до сторони постійного струму чотириквадрантного перетворювача, у якому сторону змінного струму навантажують на асинхронний короткозамкнений двигун, при цьому в якості ЕРС контролюють наведені до статора фазні ЕРС ротора зазначеного двигуна, кожну з яких обчислюють у вигляді суми трьох доданків, перший з яких являє собою відповідну фазну напругу, контрольовану на стороні змінного струму перетворювача, другий доданок розраховують у вигляді добутку активного опору статора двигуна на значення струму, контрольованого на стороні змінного струму в даній фазі перетворювача, а третій доданок визначають у вигляді добутку похідної за часом від цього струму на значення сумарної індуктивності розсіювання статора й ротора двигуна. Для зменшення загальної кількості контрольованих параметрів і операцій обчислення в способі по п.1 згадану ортогональну координатну систему задають нерухомою з орієнтацією осі абсцис по геометричній осі обмотки, що створює ЕРС у фазі «а» на стороні змінного струму перетворювача, контролюють ЕРС і струми у двох фазах «а» і «b» на стороні змінного струму чотириквадрантного перетворювача, визначають проекції узагальнених векторів ЕРС і струму на вісь абсцис нерухомої ортогональної координатної системи у вигляді значення відповідно ЕРС або струму у фазі «а», обчислюють проекції цих векторів на вісь ординат зазначеної координатної 3 суми двох системи у вигляді діленої на доданків, перший з яких являє собою значення відповідно ЕРС або струму у фазі «а», а другий доданок - подвоєне значення відповідно ЕРС або струму у фазі «b», при цьому контрольовані 30472 10 відхилення між заданими й фактичними значеннями проекцій узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, розраховують у вигляді різності заданих і обчислених значень проекцій цього узагальненого вектора на відповідні осі абсцис або ординат нерухомої ортогональної координатної системи. Здійснювані в запропонованому способі більш прості обчислення тригонометричних функцій синуса й косинуса від аргументів узагальнених векторів результуючої напруги й відхилення струму (замість обчислення безпосередньо аргументів цих векторів і різниці між зазначеними аргументами у відомому способі) і розрахунок на основі цих тригонометричних функцій нового виду прогнозованого функціонала (екстремальне значення якого задає нову комбінацію відкритих і закритих силових ключів трифазного чотириквадрантного перетворювача) зменшує вимоги до потужності використаного обчислювача. Це, в свою чергу, спрощує технічну реалізацію запропонованого способу й робить дешевше створення з використанням запропонованого способу пристрою векторного регулювання струму для активних фільтрів і частотно-регульованих асинхронних електроприводів. Таким чином, нові ознаки при взаємодії з відомими ознаками забезпечують появу нових технічних властивостей. Зокрема, шляхом введення нових операцій розроблено спосіб векторного регулювання струму на стороні змінного струму, трифазного чотириквадрантного перетворювача. Це забезпечує всій заявленій сукупності ознак способу відповідності критерію «новизна». Аналоги, що містять ознаки, які відрізняються від прототипу, не знайдені; рішення наявно не випливає з рівня техніки. Виходячи з вищевикладеного, можна зробити висновок, що запропоноване рішення задовольняє критерію «винахідницький рівень». Ідея корисної моделі пояснюється кресленнями: на Фіг.1 - функціональна схема варіанта пристрою, що реалізує запропонований спосіб; на Фіг.2 - функціональна схема варіанта реалізації уточненого обчислювача проекцій результуючої напруги (яка забезпечує підвищення точності запропонованого способу векторного регулювання струму); на Фіг.3 - функціональна схема пристрою, що реалізує запропонований спосіб векторного регулювання струму в активному фільтрі; на Фіг.4 - функціональна схема пристрою, що реалізує запропонований спосіб векторного регулювання струму в частотнорегульованому асинхронному електроприводі; на Фіг.5 - функціональна схема пристрою, що реалізує спрощений спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача. Функціональна схема пристрою на Фіг.1 містить: трифазний чотириквадрантний перетворювач 1, підключений стороною змінного струму (із клемами «а», «b» і «с») до зовнішнього трифазного електричного кола 2, а стороною 11 постійного струму (із клемами «+» і «-») - до ланцюга постійного струму 3; блок формувача імпульсів 4; блок керування 5; датчик проекцій ЕРС 6 і датчик напруги 7; блок датчиків відхилень проекцій струму 8. При цьому трифазний чотириквадрантний перетворювач 1 складається із шести керованих силових ключів 9-14 (наприклад, типу IGBT, MOSFET, GTO або IGCT), шунтованих зворотними діодами 15-20, і конденсатора 21. Зовнішнє трифазне електричне коло 2 показане на Фіг.1 у вигляді його еквівалентної схеми заміщення, що містить у своєму складі джерела ЕРС ЕA, ЕB, ЕC змінного струму, індуктивності L і активні опори R. Блок керування 5 складається з обчислювачів модуля вектора 22 і 23, обчислювачів гармонійних функцій 24 і 25, обчислювача проекцій вектора напруги 26 і обчислювача проекцій результуючої напруги 27, обчислювача прогнозуючого функціонала 28 і обчислювача екстремального значення 29, компаратора 30, регістра 31 і перетворювача коду 32. Перший і другий виходи блоку датчиків відхилень проекцій струму 8 зв'язані відповідно з першим і другим входами обчислювачів 22 і 24, вихід обчислювача 22 з'єднаний із третім виходом обчислювача 24 і зв'язаний через компаратор 30 з одним із входів регістра 31. Вхід обчислювача проекцій вектора напруги 26 з'єднаний з виходом датчика 7, підключеного до сторони постійного струму перетворювача 1, а перший і другий виходи обчислювача 26 з'єднані з першим і другим входами обчислювача проекцій результуючої напруги 27, третій і четвертий входи якого приєднані до виходів датчика проекцій ЕРС 6, підключеного до джерел фазних ЕРС ЕA, ЕB, ЕC у складі зовнішнього трифазного електричного кола 2. Два виходи обчислювача проекцій результуючої напруги 27 зв'язані із входами обчислювача 23 і приєднані до першого й другого входів обчислювача гармонійних функцій 25, третій вхід у якого з'єднаний з виходом обчислювача 23, а два виходи підключені до першого й другого входів обчислювача прогнозуючого функціонала 28. Останній з'єднаний своїм третім і четвертим входами з виходами обчислювача гармонійних функцій 24 і зв'язаний виходом через обчислювач екстремального значення 29 із другим входом регістра 31, з'єднаного виходом із входом перетворювача коду 32, виходи якого є виходом блоку керування 5 і підключені до входів блоку формувачів імпульсів 4. Виходи (позначені на Фіг.1 у вигляді: +А, -А, +В, -В, +С, -С) блоку формувачів імпульсів 4 приєднані до керуючих входів відповідно силових ключів 9-14 перетворювача 1. При цьому перший і другий виходи датчика відхилень проекцій струму 8, третій і четвертий входи обчислювача проекцій результуючої напруги 27 і вхід обчислювача проекцій вектора напруги 26 є відповідно першим, другим, третім, четвертим і п'ятим входами блоку керування 5. Функціональна схема варіанта реалізації уточненого обчислювача проекцій результуючої напруги 27, представлена на фіг.2, містить першій й другий основні суматори 33 і 34, додаткові 30472 12 суматори 35-38, множні блоки 39-42, датчик частоти 43, блок датчиків проекцій струму 44 і задатчик параметрів 45. При цьому перший з виходів задатчика параметрів 45 приєднаний до перших виходів множних блоків 40 і 41, другі входи множних блоків 39 і 40 приєднані до першого виходу блоку датчиків проекцій струму 44, другий вихід якого приєднаний до других входів множних блоків 41 і 42, треті входи множних блоків 40 і 41 підключені до виходу датчиків частоти 43. Виходи множних блоків 39 і 41 приєднані відповідно до першого й другого входів суматора 35, підключеного виходом до першого входу суматора 36, другий вхід якого з'єднаний з виходом основного суматора 33, перший і другий входи суматора 33 є відповідно першим і третім входами обчислювача проекцій результуючої напруги 27. Виходи множних блоків 40 і 42 приєднані відповідно до першого й другого входів суматора 38, підключеного виходом до першого входу суматора 37, другий вхід якого з'єднаний з виходом основного суматора 34, перший і другий входи суматора 34 є відповідно другим і четвертим входами обчислювача проекцій результуючої напруги 27, а виходи суматорів 36 і 37 є відповідно першим і другим виходами зазначеного обчислювача проекцій результуючої напруги 27. У функціональній схемі пристрою на Фіг.3 (реалізуючого запропонований спосіб векторного регулювання струму стосовно до активного фільтра) сторона змінного струму (позначена клемами «а», «b» і «с») чотириквадрантного перетворювача 1 підключена безпосередньо або через реактори 46 до джерела трифазної напруги мережі 47 (показаного на фіг.3 виконаним як можливий варіант у вигляді трифазного силового трансформатора Т, у якого виходи вторинних обмоток є виходами зазначеного джерела 47). При цьому входи датчика проекцій ЕРС 6 приєднані до виходів джерела трифазної напруги мережі 47, а два його виходи - до третього й четвертого входів блоку керування 5. Вхід датчика напруги 6 підключений до сторони постійного струму (позначеної на Фіг.3 клемами «+» і «-») перетворювача 1, з'єднаної з навантаженням 48, а вихід датчика 6 з'єднаний з п'ятим входом блоку керування 5, підключеного своїми першими й другими входами відповідно до першого й другого виходів блоку датчиків відхилень проекцій струму 8 і зв'язаного своїми виходами через блок формувачів імпульсів 4 з керуючими входами перетворювача 1. У функціональній схемі пристрою на Фіг.4 (реалізуючого запропонований спосіб векторного регулювання струму стосовно до частотнорегульованого асинхронного електропривода) сторона постійного струму (позначена клемами «+» і «-») чотириквадрантного перетворювача 1 підключена до джерела постійної напруги 49, а сторона змінного струму (показана клемами «а», «b» і «с») - до асинхронного короткозамкненого двигуна 50 (показаному на Фіг.4 у вигляді його еквівалентної схеми заміщення, що містить послідовно з'єднані між собою активний опір статора RS, сумарну індуктивність розсіювання 13 L s - статора й ротора двигуна й наведену до статора фазну ЕРС ЕА (ЕB або ЕC) ротора двигуна [3]). При цьому вхід датчика напруги 7 з'єднаний зі стороною постійного струму перетворювача 1, а його вихід - з п'ятим входом блоку керування 5, у якого перший і другий входи підключені відповідно до першого й другого виходів блоку датчиків відхилень проекцій струму 8, а виходи зв'язані через блок формувачів імпульсів 4 з керуючими входами перетворювача 1. При цьому датчик проекцій ЕРС 6 виконаний у вигляді трифазних блоків датчиків напруги 51 і струму 52, підключених своїми входами до сторони змінного струму перетворювача 1, а виходами - до першого і другого трифазних входів обчислювача ЕРС ротора 53, з'єднаного своїм трифазним виходом із трифазним входом перетворювача фаз 54. Перший і другий виходи останнього підключені до першого й другого входів прямого координатного перетворювача 55, у якого третій і четвертий входи підключені до першого й другого виходів датчика гармонійних функцій 56, а перший і другий виходи є відповідно першим і другим виходами датчика проекцій ЕРС 7 і приєднані відповідно до третього й четвертого входів блоку керування 5. Функціональна схема пристрою на Фіг.5 (реалізуючого спрощений спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача) містить чотириквадрантний перетворювач 1, підключений стороною змінного струму (позначеною клемами «а», «b» і «с») до зовнішнього трифазного електричного кола 2, а стороною постійного струму (показаною клемами «+» і «-») до навантаження 48, блок формувачів імпульсів 4 і блок керування 5, датчик проекцій ЕРС 6 і датчик напруги 7, блок датчиків відхилень проекцій струму 8. При цьому блок керування 5 приєднаний своїми першим і другим входами відповідно до першого й другого виходів блоку датчиків відхилень проекцій струму 8, третім і четвертим входами - до першого й другого виходів датчика проекцій ЕРС 6, а п'ятим входом - до виходу датчика напруги 7, підключеного до сторони постійного струму перетворювача 1, виходи блоку керування 5 зв'язані через блок формувачів імпульсів 4 з керуючими входами перетворювача 1. Блок датчиків відхилень проекцій струму 8 виконаний у вигляді двох суматорів 57 і 58, перетворювача фаз 59 і задатчика проекцій струму 60, датчиків струму 61 і 62. При цьому перші входи суматорів 57 і 58 підключені відповідно до першого й другого виходів задатчика проекцій струму 60, а другі входи - відповідно до першого й другого виходів перетворювача фаз 59, з'єднаного своїми входами з виходами датчиків струму 61 і 62, установлених у фазах «а» і «b» на стороні змінного струму перетворювача 1, виходи суматорів 57 і 58 є відповідно першим і другим виходами блоку відхилень проекцій струму 8. Датчик проекцій ЕРС 6 виконаний у вигляді блоку датчика напруги 63, з'єднаного своїми першим і другим входами з виходами джерел ЕРС ЕА і ЕB у фазах «а» і «b» на 30472 14 стороні змінного струму перетворювача 1, а першим і другим виходами - з першим і другим входами перетворювача фаз 64, підключеного своїми першим і другим виходами відповідно до третього й четвертого входів блоку керування 5. Запропонований спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача 1 функціонує (розглянемо на прикладі пристрою, показаного на Фіг.1) у такий спосіб. Контролюючи на своїх входах фазні ЕРС ЕA, ЕB, ЕC на стороні змінного струму перетворювача 1, датчик проекцій ЕРС 6 визначає на своїх двох виходах зі співвідношень [3]: Ea = E A ; E b = (E B - E C ) / 3 ;ü ï E X = E a cos Q k + E b sin Q k , ý (1) E y = E b cos Q k - E a sin Q k ï þ проекції ЕX й Еу узагальненого вектора ЕРС E = ЕX + jEy на осі абсцис «х» і ординат «у» ортогональної координатної системи «х-у». У cos Q k sinQk даних співвідношеннях: i Qk гармонійні функції від аргументу координатної системи «х-у», яка обертається з довільною Q кутовою частотою (причому, аргумент k являє собою кут між віссю абсцис «х» зазначеної ортогональної координатної системи й геометричною віссю обмотки, що створює ЕРС ЕA у фазі «а» на стороні змінного струму перетворювача 1); j – мнима одиниця.За допомогою датчика напруги 7 контролюють напругу Ud на стороні постійного струму перетворювача 1, за допомогою якого для кожного можливого номера комбінації m відкритих і закритих силових ключів перетворювача 1 в обчислювачі проекцій вектора напруги 26 визначають прогнозовані значення проекцій Ux(m) і Uy(m) узагальненого вектора = U x (m) + jU y (m), U(m) напруги створюваного на стороні змінного струму перетворювача 1 при даних всіх можливих комбінаціях його відкритих і закритих силових ключів. Зазначені проекції Ux(m) й U (m) узагальнений вектор U(m) на осі згаданої y ортогональної координатної системи х-у розраховуються в обчислювачі 26 з даних табл. 1 і з наступних співвідношень [3]: U x (m) = Ua (m) cos Q k + Ub (m) sin Q k ,ü ï U y (m) = Ub (m) cos Q k + Ua (m) sin Q k ý ï m = 12...8, , þ (2) Табл.1. Умовні номери комбінацій відкритих (показані знаком «+») закритих силових ключів чотириквадрантного перетворювача Номер комбінації Наявність відмикаючих Ua (m) U b ( m) 15 m 30472 імпульсів керування +А -А +В -В +C -C 1 + 2 + + + + + + 3 + + 4 + + 5 + 6 7 8 0 + Ud/2 + -Ud/2 + -Ud + + -Ud/2 + + + +Ud + + + + + + 3 U /2 d + 3 3U /2 d 0 - 3 Ud/2 + Ud/2 - 3 Ud/2 0 0 0 0 За допомогою обчислювача проекцій результуючої напруги 27 обчислюються у вигляді різниці проекцій Ех, Еу узагальненого вектора ЕРС E і проекцій Ux(m), Uy(m) узагальненого вектора напруги U(m) на відповідні осі ортогональної координатної системи «х-у»: DU x (m) = E x - U x (m),ü ï ý DU y (m) = E y - U y (m) ï þ значення проекцій DU x (m) (3) і DU y (m) DU x (m) результуючого вектора напруги DU(m) = DU y (m) + . При цьому вісь абсцис «х» даної координатної системи приймають за вісь відліку аргументів всіх узагальнених векторів, що обчислюються при функціонуванні розглянутого пристрою.За допомогою блоку датчиків відхилень проекцій струму 8 контролюють для узагальненого вектора струму I , створюваного на стороні змінного струмуперетворювача 1, відхилення DI x , DI y між заданими І*х, І*у й фактичними Іх, Іу значеннями його проекцій на осі зазначеної ортогональної системи «х-у»: ü DI x = I * - I x ,ï x (4) ý * DI y = I y - I y .ï þ Обчислювач 22 розраховує на своєму виході у вигляді кореня квадратного із суми квадратів згаданих відхилень D Іх, D Іу проекцій струму модуль D І узагальненого вектора відхилення струму D I = D ІХ + jly зі співвідношення: DI = DI 2 + DI 2 x y 1/ 2 . (5) За допомогою обчислювача гармонійних функцій 24 у вигляді відношень відхилень D Іх, D Іу проекцій струму на осі абсцис «х» і ординат «у»ортогональної координатної системи до модуля D І узагальненого вектора відхилення струму D I визначають значення відповідно косинуса й синуса від аргументу Q D І цього вектора: cos QDI = DI x / DI,ü ï (6) ý sin Q = DI y / DI. ï þ 16 За допомогою обчислювача 23 для всіх можливих комбінацій m відкритих і закритих силових ключів перетворювача 1 розраховують у вигляді кореня квадратного із суми квадратів його проекцій D Ux(m), D Uy(m) значення модуля DU x (m) результуючого вектора напруги D U(m) : [ ] DU(m) = DU 2 (m) + DU 2 (m) x y За допомогою 1/ 2 (7) обчислювача гармонійних DU x (m) функцій 25 у вигляді відношень проекцій DU y (m) що результуючого вектора напруги на осі абсцис «х» і ординат «у» ортогональної координатної системи до його модуля D U(m): cos QD U(m) = DU x (m) / DU(m),ï ü (8) ý sin QDU(m) = DU y (m) / DU(m) ï þ обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача 1 значення відповідно косинуса й DU y (m) синуса від аргументу Q цього вектора. За допомогою обчислювача 28 розраховують прогнозуючий функціонал F(m) у вигляді суми двох доданків, перший з яких являє собою добуток DU x (m) косинусів від аргументів Q і Q DІ відповідно результуючого вектора напруги D U(m) й узагальненого вектора відхилення струму D I , а другий доданок - добуток синусів від аргументів тих же векторів: F(m)ëcos QDU(m)û cos QDI + ësin QDU(m)û sin QDI. (9) За допомогою компаратора 30 порівнюють значення модуля D І узагальненого вектора D I відхилення струму із установленою величиною D ІП номінального струму на стороні змінного струму перетворювача 1). Якщо значення модуля D І узагальненого вектора відхилення струму не перевищує встановленої величини D ІП, то з виходу компаратора 30 на один із входів («Блокування») регістра 31, що представляє собою комірку пам'яті, надходить сигнал лог. «0», що забороняє (блокує) зміну вихідних сигналів регістра 31. Внаслідок цього зберігається колишня комбінація, що задається регістром 30, m = m* = const m (де ) відкритих і закритих силових ключів перетворювача 1. Відповідно до заданої комбінації m*, що надходить із виходу регістра 31 на вхід перетворювача коду 32, на виході останнього формуються необхідні для заданої комбінації m (відповідно до табл.1) сигнали керування силовими ключами, які підсилюються й гальванічно розв'язуються за допомогою блоку формувачів імпульсів 4 і надходять на відповідні силові ключі 9-14 перетворювача 1. У такий спосіб зберігається колишня комбінація m = m* відкритих і закритих силових ключів перетворювача 1, при якій відхилення D Іх, D Іу проекцій струмів не перевищують встановленої величини D ІП. Якщо значення модуля D І узагальненого вектора відхилення струму перевищує 17 30472 встановлену величину D ІП (що буває, мабуть, при більших значеннях відхилень D Іх, D Іу проекцій струму на виходах блоку датчиків відхилень проекцій струму 8, які, наприклад, перевищують установлену величину D ІП), вихідний сигнал компаратора 30 змінюється на балку «1». Внаслідок цього припиняється блокування (заборона зміни) вихідних сигналів регістра 32. При цьому за допомогою обчислювача екстремального значення 29 із всіх розрахованих (для всіх можливих з табл. 1 комбінацій відкритих і закритих силових ключів перетворювача 1) значень прогнозуючого функціонала F(m) знаходять його екстремальне значення F(m**) й визначають відповідному цьому екстремальному значенню функціонала комбінацію m** силових ключів перетворювача. Зазначена (певним обчислювачем 29 у якості нової) комбінація m** відкритих і закритих силових ключів надходить на установочний вхід регістра 31. Оскільки сигнал на виході компаратора 30, як відзначено, у цей час дорівнює лог. «1», то на виході регістра 31 змінюється стан його сигналів на новий: m = m*, що задається від обчислення 29. Внаслідок цього через перетворювач коду 32 і блок формувачів імпульсів 4 задається нова комбінація (з табл. 1 для m = m**) відкритих і закритих силових ключів перетворювача 1, що відповідає зазначеному екстремальному значенню F(m**) прогнозуючого функціонала. Причому, знову стала комбінація m** відкритих і закритих силових ключів перетворювача 1 викликає зменшення значень відхилень проекцій струму D ІХ й D Іу на виходах блоку датчиків відхилень проекцій струму 8. Пояснимо це в такий спосіб, використовуючи наступні співвідношення [3] для зовнішнього трифазного електричного кола 2 трифазні струми чотириквадрантного перетворювача 1 у пристрої на Фіг.1: dI E = RI + L + jwk LI + U(m), (10) dt записане в обертовій (з довільною кутовою wk частотою ) полярній координатній системі через узагальнені вектори відповідно ЕРС E , напруги U(m) й токи I на стороні змінного струму чотириквадрантного перетворювача. Дані узагальнені вектори розраховуються з відповідних фазних значень зазначених величин у вигляді [3]: 2 ü E = E A + aE B + a 2E C , ï 3 ï 2 ï U(m) = U A + aUB + a 2UC ,ý, (11) 3 ï 2 ï I = I A + aI B + a 2 I C ï 3 þ ( ( ( ) ) ) j2 p / 3 де a = e - поворотний множник. З (10) знайдемо похідну узагальненого вектора струму (на стороні змінного струму перетворювача 1): dI 1 = E - U(m) - RI - jwk LI . (12) dt L [ ] 18 Перейшовши від диференціалів d I і dt до їхніх збільшень D I і D t, визначимо з (12) збільшення зазначеного узагальненого вектора струму (для mої комбінації його відкритих і закритих силових ключів): DI = Dt E - U(m) - RI - jwk LI / L. (13) Беручи до уваги на практиці малі значення jwk LI (у порівнянні з іншими доданків R I і доданками у квадратних дужках останнього вираження), одержимо з (13) наближене співвідношення для визначення збільшення узагальненого вектора струму: DI » Dt E - U(m) / L. (14) З (13) і (14) випливає, що приріст узагальненого вектора D I при m-ої комбінації відкритих і закритих силових ключів перетворювача 1 колінеарне результуючому вектору напруги D U(m) , що розраховується в [ [ ] ] уточненому виді із залежності: DU(m) = E - U(m) - RI - jwk L I, (15) або приблизно зі співвідношення: DU(m) » E - U(m). (16) Саме для розрахованого з наближеного співвідношення (16) результуючого вектора напруги D U(m) в обчислювачі 27 пристрою на Фіг.1 були раніше знайдені проекції D Ux(m) й D Uy(m) цей вектор на осі ортогональної координатної системи «х-у».Виходячи з відзначеної колінеарності узагальненого вектора збільшення струму D I й вектора результуючої напруги D U(m) , рівні між собою аргументи цих векторів відповідно: QDI = QD U(m ). (17) Перетворивши прогнозуючий функціонал F(m) з (9) до еквівалентного виду: F(m) = ëcos QDU(m) - QDI û. (18) знайдемо його екстремальне (найбільше значення): F(m * *)= ëcos QDU(m * *) - QDI û= max, (19) яке досягається для m** -ой комбінації відкритих і закритих силових ключів перетворювача 1 при виконанні умови: QD U(m * *) - QDI = 0, (20) де Q D U(m** ) - аргумент результуючого вектора напруги D U(m) при m = m**. Оскільки при m = m** співвідношення (20) рівноцінно (17), то при новій комбінації m**, що задається, відкритих і закритих силових ключів перетворювача 1 фактично створюється таке збільшення узагальненого вектора D I струму, що усуває (зводить до нуля) виникаючі відхилення D ІХ, D Іу проекцій для узагальненого вектора струму (контрольовані на виходах блоку датчиків 8). Це рівноцінно з урахуванням співвідношень (4) відпрацьовуванню заданих значень проекцій 19 узагальненого вектора струму I змінного струму перетворювача 1): I x » I* ü xï ý I y » I* ï yþ 30472 (на стороні (21) Як тільки відхилення D ІХ, D Іу проекцій струму зменшаться до значень, при яких модуль D І узагальненого вектора відхилення струму (який розраховується обчислювачем 22) стане менш установленої величини АІП, компаратор 30 змінить вихідний сигнал на лог. «0». Після цього забороняється (по входу «Блокування») зміна вихідних сигналів регістра 31, внаслідок чого зберігається незмінним (відповідної комбінації m**) стан відкритих і закритих силових ключів перетворювача 1.У такий спосіб у пристрої Фіг.1 здійснюється векторне (по амплітуді, частоті й фазі) регулювання фазних струмів ІA, IВ, IС на стороні змінного струму чотириквадрантного перетворювача 1, які пов'язані з регульованими проекціями Іх, Іу узагальненого вектора струму ї наступними співвідношеннями [3]: I A = Ia, ü ï I B = 0,5I a + 3 I b / 2, ï ï I C = -0,5I a - 3 I b / 2, ý, (22) I a = I x cos Q k - I y sin Q k ,ï ï I b = I x sin Q k + I y cos Q k ï þ Ib Ia де й - проекції узагальненого вектора I Ia + j b на осі нерухливої струму I = ортогональної координатної системи « a - b » (орієнтованою віссю абсцис « a » по геометричній осі обмотки, що створює ЕРС ЕА у фазі «а» на стороні змінного струму чотириквадрантного перетворювача 1).При цьому запропонований спосіб векторного регулювання струму є істотно простіше в технічній реалізації, чим відомий спосіб - прототип [2]. Це обумовлено використанням у відомому способі при знаходженні прогнозуючого функціонала більше простих обчислювальних операцій (а саме - обчислень тригонометричних функцій косинуса й синуса, їхніх добутків і суми) замість істотно більше складних (знаходження аргументів узагальнених векторів і їхньої різниці) у відомому способі. У свою чергу, спрощення технічної реалізації пристроїв при застосуванні запропонованого способу векторного регулювання струму забезпечує їхнє здешевлення (за рахунок використання менш потужного обчислювача) при одночасному збереженні необхідної якості (швидкодії й точності) регулювання струму на стороні змінного струму чотириквадрантного перетворювача. Варіант реалізації обчислювача проекцій результуючої напруги 27, показаний на схемі на Фіг.2, функціонує в такий спосіб. На перші із входів основних суматорів 33 і 34 з виходів датчика проекцій ЕРС 6 надходять сигнали Ех, Еу проекцій узагальненого вектора ЕРС E на осі ортогональної координатної системи «х-у», а на другі входи зазначених основних суматорів 33 і 34 надходять вихідні сигнали Ux(m), Uy(m), від 20 обчислювача проекцій вектора напруги 26; при цьому на виходах суматорів 33 і 34 формуються DU y (m) DU x (m) сигнали й , описувані співвідношеннями з (3). З виходів блоку датчика проекцій струму 44 на одні із входів множних блоків 39-42 надходять сигнали фактичних значень проекцій Іх, Іу узагальненого вектора струму I (створюваного на стороні змінного струму перетворювача 1) на осі ортогональної координатної системи «х-у», а на другі із входів тих же множних блоків 39 - 42 з виходів задатчика параметрів 45 надходять значення еквівалентних активного опору R і індуктивності L для зовнішнього трифазного електричного кола перетворювача 1 (показаною позицією 2 на Фіг.1). На треті із входів множних блоків 40 і 41 надходить із виходу датчика частоти 43 сигнал кутової wk частоти обертання ортогональної координатної системи «х-у». При цьому на виході множних блоків 39 і 41 формуються сигнали, рівні w відповідно RIX й k LIy, які віднімаються між собою на суматорі 35, а отримана різниця цих сигналів віднімається на суматорі 36 з вихідного сигналу основного суматора 33. На виході множних блоків 40 і 42 формуються сигнали, рівні відповідно wk LIX й RIy, які підсумовуються між собою на суматорі 38, а отримана сума цих сигналів обчислюється на суматорі 37 з вихідного сигналу основного суматора 34.У результаті цього на виході суматора 36 формується сигнал D U'x(m), отриманий з вихідного сигналу [Ex -Ux(m)] основного суматора 33 за додатковим відрахуванням різниці двох доданків, перший з яких являє собою добуток активного опору R фази змінного струму перетворювача на значення проекції Іх узагальненого вектора струму на вісь абсцис «х», а другий доданок -добуток індуктивності L фази змінного струму перетворювача на кутову частоту обертання С0к координатної системи й на проекцію узагальненого вектора струму Іу на вісь ординат «у»: DU' x (m) = [E x - U x (m)] + w k LI y - RI x . (23) На виході суматора 37 формується сигнал D U'y(m), отриманий з вихідного сигналу [Ey-Uy(m) ] основного суматора 34 за додатковим відрахуванням суми двох доданків, перший з яких являє собою добуток активного опору R фази змінного струму перетворювача на значення проекції Іу узагальненого вектора струму на вісь ординат «у», а другий доданок - добуток індуктивності L фази змінного струму w перетворювача на кутову частоту обертання k координатної системи й на проекцію Іх узагальненого вектора на вісь абсцис «х» зазначеної ортогональної координатної системи «х-у»: DU' y (m) = ëE y - U y (m)û - wk LI x - RI y . (24) Беручи до уваги, що співвідношення (23) і (24) на виході обчислювача 27 (виконаного, нагадаємо, 21 згідно Фіг.2) являють собою проекції (відповідно на осі «х» і «у» розглянутої ортогональної системи) D U(m) , результуючого вектора напруги розрахованого з уточненого співвідношення (15), то зазначене виконання обчислювача проекцій результуючої напруги 27 дозволяє на практиці здійснити більш швидкодіюче й точне відпрацьовування заданих проекцій І*х і І*у узагальненого вектора струму в запропонованому способі векторного регулювання струму на стороні змінного струму чотириквадрантного перетворювача 1.Пристрій на Фіг.3, у якому реалізується запропонований спосіб векторного регулювання струму стосовно до активного фільтра, функціонує в такий спосіб. Від джерела трифазної напруги мережі 47 (наприклад, виконаного у вигляді трифазного силового трансформатора Т) подають живлення безпосередньо або через реактори (струмообмежувальні або фільтрові з індуктивністю Lp) 46 до сторони змінного струму (клеми «а», «b», «с») чотириквадрантного перетворювача 1, що живить від своєї сторони постійного струму (клеми «+» і «-»), наприклад, навантаження 48. Таке взаємне з'єднання джерела трифазної напруги мережі 47, реакторів 46, трифазного чотириквадрантного перетворювача 1 і навантаження 48 відповідає, як відомо, активним фільтрам [3].У пристрої на Фіг.3 на вході датчика проекцій ЕРС 6 контролюють у якості фазних ЕРС на стороні змінного струму перетворювача 1 вихідні фазні напруги джерела трифазної напруги мережі 47 (або, що теж саме, фазні напруги вторинних обмоток силового трансформатора Т). На перший і другий входи блоку керування 5 з виходу блоку датчиків 8 надходять сигнали відхилень проекцій D ІХ, D Іу узагальненого вектора струму I (створюваного на стороні змінного струму перетворювача 1), на треті й четверті входи - з виходу датчика проекцій ЕРС 6 сигнали проекцій Ех, Еу узагальненого вектора ЕРС (на осі ортогональної координатної системи «х-у»), а на п'ятий вхід блоку керування 5 -вихідний сигнал Ud датчика напруги 7 (контролюючого напругу на стороні постійного струму перетворювача 1). Функціонуючи в повній відповідності з раніше описаною (при розгляді пристрою на фіг. 1) своєю роботою, блок керування 5 задає через блок формувачів імпульсів 4 такі комбінації (m = 1, 2, ...6 з табл. 1) відкритих і закритих силових ключів перетворювача 1, які забезпечують відомість до нуля значення відхилень проекцій струму ( D Іх » 0, D Іу » 0) на виході блоку датчиків 8 і згідно (21) відпрацьовування заданих значень проекцій I*х, I*у узагальненого вектора струму, створюваного на стороні змінного струму зазначеного перетворювача. Беручи до уваги здійснюване живлення сторони змінного струму чотириквадрантного перетворювача 1 у пристрої на Фіг.3 від джерела трифазної напруги мережі 47, шляхом зміни заданих значень зазначених проекцій I*х, I*у узагальненого вектора струму, 30472 22 створюваного на стороні змінного струму даного перетворювача, досягається, мабуть, регулювання активної й реактивної потужності, споживаної від джерела 47 перетворювачем 1. У такий спосіб у пристрої на фіг.3 (створеному на основі запропонованого способу регулювання струму) здійснюється векторне регулювання мережного струму активного фільтра (роль якого в даному пристрої виконує перетворювач 1), що дозволяє, у свою чергу, регулювати споживану активним фільтром із трифазної мережі реактивну потужність. Зазначене регулювання реактивної потужності, як відомо, знижує втрати в мережах електропостачання електроспоживачів і зменшує оплату останніх енергопостачальним компаніям за реактивну електроенергію.Пристрій на фіг.4, у якому реалізується запропонований спосіб векторного регулювання струму стосовно до частотно-регульованого асинхронного електропривода, функціонує в такий спосіб. Від джерела постійної напруги 49 подають живлення до сторони постійного струму (показаної клемами «+» і «-») чотириквадрантного перетворювача 1, у якому сторону змінного струму (позначену клемами «а», «b», «с») навантажують на асинхронний короткозамкнений двигун 50. Зазначене взаємне з'єднання джерела постійної напруги 49, трифазного чотириквадрантного перетворювача 1 і асинхронного двигуна 50 відповідає, як відомо, частотно-регульованим асинхронним електроприводам, створюваним на основі трифазного автономного інвертора напруги (виконаного на Фіг.4 у вигляді перетворювача 1) із широтно-імпульсною модуляцією [3]. У пристрої на Фіг.4 за допомогою блоку датчика напруги 51 і блоку датчиків струму 52 контролюють відповідно фазні напруги UA, UB, UC й фазні струми ІA, IВ, ІС на стороні змінного струму чотириквадрантного перетворювача 1 (виконуючого, як відзначено вище, роль трифазної автономної напруги). Через зазначені фазні напруги UA, UB, UC й струми ІA, IВ, ІС щo надходять на входи обчислювача ЕРС ротора 53, в останньому розраховуються наведені до статора фазні ЕРС ротора ЕA, ЕB, ЕC асинхронного двигуна 50 зі співвідношень [3]: dI ü E A = U A + R S I A + Ls A ï dt ï dI B ï E B = U B + R S I B + Ls (25) ý dt ï IC ï d E C = U C + R S I C + Ls dt ï þ Дані співвідношення отримані з [3] з урахуванням прийнятих позитивних напрямків струмів ІA, IВ, ІС на стороні змінного струму перетворювача 1 у пристрої на Фіг.1 і Фіг.4, що відповідають протіканню цих струмів від фазних ЕРС ЕA, ЕB, ЕC до клем «a», «b», «с» зазначеного перетворювача. При розрахунках зі співвідношень (25) кожну з наведених до статора фазних ЕРС ротора (покажемо на прикладі фази «а») обчислюють у вигляді суми трьох доданків, перший з яких являє собою відповідна фазна напруга UA, контрольована на стороні змінного струму перетворювача 1, другий доданок 23 розраховують у вигляді добутку активного опору статора RS двигуна на значення струму ІA, контрольованого на стороні змінного струму в даній фазі перетворювача 1, а третій доданок dI A визначають у вигляді добутку похідної dt за часом від цього струму на значення сумарної індуктивності розсіювання Ls статора й ротора двигуна 50. Через вступників на його входи з обчислювача 53 сигнали фазних ЕРС ротора EA, EB, EC на виходах перетворювача фаз 54 розраховуються із двох перших співвідношень в E ,E (1) проекції a b (на осі нерухомої координатної системи « a - b », орієнтованою віссю абсцис « a » по геометричній осі обмотки статора фази «а» двигуна) наведеного до статора узагальненого E + jE b вектора ЕРС ротора E = a двигуна. На виходах датчика гармонійних функцій 56 розраховуються значення косинуса й синуса від поточного аргументу Q k осі абсцис «х» ортогональної координатної системи «х-у», які надходять на два із входів прямого координатного перетворювача 55. На два інших входи координатного перетворювача 55 з виходу перетворювача фаз 54 надходять розраховані E ,E значення проекцій a b наведеного до статора узагальненого вектора ЕРС. Через згадані його вихідні сигнали на двох виходах координатного перетворювача 55 обчислюються із третього й четвертого співвідношень в (1) значення проекцій Ех, Еу узагальненого вектора ЕРС E ротора двигуна на осі ортогональної координатної системи «х-у». При цьому зауважимо, що розглянута (при описі функціонування пристрою на Фіг.4) сукупність елементів ( що містить у своему складі блоки датчиків 51 і 52, обчислювач 53 і датчик 56, перетворювач фаз 54 і координатний перетворювач 55) являє собою можливий варіант реалізації датчика проекцій ЕРС у цьому пристрої. У пристрої на Фіг.4 у блоці керування 5 надходять на перший і другий входи з виходу блоку датчиків D Ix, D Uy відхилень проекцій 8 сигнали узагальненого вектора струму, створюваного на стороні змінного струму перетворювача 1, на третій і четвертий входи - згадані значення проекцій Ех, Еу узагальненого вектора ЕРС E на осі ортогональної координатної системи «х-у», на п'ятий вхід - вихідний сигнал Ud датчика 7, що контролює напругу на стороні постійного струму перетворювача 1. Аналогічно раніше розглянутим пристроям на Фіг.1 і Фіг.3 блок керування 5 задає своїми вихідними сигналами через блок формувачів імпульсів 4 такі комбінації (m = 1, 2...8 ... 8 з табл. 1) відкритих і закритих силових ключів перетворювача 1, які забезпечують зведення до нуля відхилень проекцій струму: D ІХ » 0, D Іу » 0 на виході блоку датчиків 8 і згідно (21) відпрацьовування заданих значень проекції І*х, I*у узагальненого вектора струму, створюваного на стороні змінного струму зазначеного 30472 24 перетворювача. При здійснюваному (за допомогою запропонованого способу) векторному регулюванні струму на стороні змінного струму перетворювача 1 у пристрої на Фіг.4 створюється можливість регулювання (шляхом зміни значень проекцій Іх, Іу узагальненого вектора струму I у двигуні) фазового зрушення між аргументами узагальнених векторів ЕРС E і струму I двигуна 50, а також - регулювання модуля останнього вектора. Це, у свою чергу, дозволяє змінювати електромагнітні параметри режиму асинхронного двигуна 50, оскільки, як відомо, проекція узагальненого вектора струму на вектор ЕРС ротора пропорційна електромагнітному моменту двигуна, а інша (їй ортогональна) проекція узагальненого вектора струму задає магнітний потік зазначеного двигуна [3]. За рахунок швидкодіючого й точного векторного регулювання струму на стороні змінного струму перетворювача 1 у пристрої на фіг.4 досягається, у свою чергу, висока швидкодія відпрацьовування й підвищена точність стабілізації електромагнітного моменту й потокозчеплення двигуна в частотнорегульованому асинхронному електроприводі. Пристрій на Фіг.5 (у якому реалізується спрощений спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача) функціонує в такий спосіб. За допомогою датчиків струму 61, 62 і блоку датчиків напруги 63 контролюють відповідно струми ІA, IВ, і ЕРС ЕA, EB у фазах «а» і «b» на стороні змінного струму чотириквадрантного перетворювача 1. На виході перетворювача фаз 64 по його вхідних сигналах ЕA і EB ( що надходять із блоку датчиків E a , Eb напруги 63) визначають проекції узагальненого вектора ЕРС E на осі нерухомої ортогональної координатної системи « a - b ». Причому, згадану нерухому ортогональну систему « a - b » задають орієнтованою віссю абсцис « a » по геометричній осі обмотки, що створює ЕРС ЕA у фазі «а» на стороні змінного струму Ea перетворювача 1. При цьому проекцію узагальненого вектора ЕРС E на вісь абсцис « a » нерухомої координатної системиобчислюють у вигляді значення ЕРС Ед у фазі «a», а проекцію Eb цього вектора на вісь ординат « b » тої ж нерухомої ортогональної координатної системи розраховують у вигляді діленої на 3 суми двох доданків, перший з яких являє собою значення ЕРС ЕA у фазі «а», а другий доданок - подвоєне значення ЕРС EB у фазі «b»: Ea = E A ü ï (25) ý E b = (E A + 2E B ) / 3 .ï þ Справедливість залежностей (25) належить із двох перших співвідношень із (1), беручи до уваги на практиці умову, що виконується, для розглянутих трифазних електричних кіл ЕA + ЕB + ЕC = 0.По його вхідних сигналах ІA і IB (що надходять із виходу датчиків струму 61 і 62) на 25 виході перетворювача фаз 59 розраховуються I I проекції a , b узагальненого вектора струму I (створюваного на стороні змінного струму перетворювача 1) на осі зазначеної нерухомої ортогональної координатної системи « a - b ». При I цьому проекцію a узагальненого вектора струму I на вісь абсцис « a » нерухомої координатної системи обчислюють у вигляді значення струму ІA I у фазі «a», а проекцію b цього вектора на вісь ординат « b » тої ж нерухомої ортогональної координатної системи розраховують у вигляді діленої на 3 суми двох доданків, перший з яких являє собою значення струму ІA у фазі «а», а другий доданок - подвоєне значення струму IB у фазі «b»: Ia = IA ü ï (26) ý I b = (I A + 2I B ) / 3 .ï þ Залежності з (26) отримані аналогічно (25) за умови: ІA + IB + IC = 0. З виходів задатчика проекцій струму 60 на перші входи суматорів 57 і 58 надходять задані I I значення проекцій a *, b * узагальненого вектора струму I * на осі згаданої нерухомої ортогональної координатної системи « a - b », а на другі входи цих суматорів 57 і 58 - з виходів перетворювача фаз 59 обчислені (фактичні) значення проекцій Ia Ib , узагальненого вектора I на осі тої ж нерухомої ортогональної координатної системи. I I I I Через свої вхідні сигнали a *, b * й a , b суматори 57 і 58 на своїх виходах контролюють I I I I відхилення D a , D b між заданими a *, b * й Ia Ib фактичними , значеннями проекцій узагальненого вектора струму I , створюваного на стороні змінного струму перетворювача 1. I I Причому, контрольовані відхилення D a , D b суматори 57 і 58 розраховують у вигляді різностей I I I I заданих a *, b * і обчислених a , b значень проекцій узагальненого вектора струму I на відповідні осі абсцис « a » або ординат « b » нерухомої ортогональної координатної системи « a - b »: ü DI a = I * - I a ,ï a (27) ý * DI b = I b - I b . ï þ У пристрої на Фіг.5 у блок керування 5 надходять на перший і другий входи з виходу I I суматорів 57 і 58 сигнали D a , D b відхилень проекцій узагальненого вектора струму, створюваного на стороні змінного струму перетворювача 1, на третій і четвертий входи - з виходів перетворювача фаз 64 значення 30472 26 E ,E проекцій a b узагальненого вектора ЕРС E на осі тої ж нерухомої ортогональної координатної системи « a - b », на п'ятий вхід - вихідний сигнал Ud датчика 7, щоконтролює напругу на стороні постійного струму перетворювача 1. Своїми вихідними сигналами блок керування 5 задає через блок формувачів імпульсів 4 такі комбінації відкритих і закритих силових ключів перетворювача 1, які забезпечують зведення до I I нуля відхилень проекцій струму: D a » 0, D b » 0 на виході суматорів 57 і 58 у блоці датчиків 8 і відповідно до (27) відпрацьовування заданих значень проекцій: I * » I a i I * » Ib a b (28) I I узагальненого вектора струму I = a * + j b *, створюваного на стороні змінного струму перетворювача. Зауважимо, що робота блоку керування 5 у пристрої на Фіг.5 ідентична роботі цього блоку, розглянутої в пристрої на Фіг.1. При цьому єдина відмінність у роботі блоку керування 5 у складі пристрою на Фіг.5 полягає в тому, що I I його вхідні сигнали (зокрема, проекції D a , D b E a , Eb D I й проекції вектора струму узагальненого вектора ЕРС E ) визначаються при цьому в нерухомій ортогональній координатній системі (яка, мабуть, є частковим випадком при wk = 0 раніше розглянутій у пристрої Фіг.1 довільної ортогональної координатної системи «ху», що обертається з кутовою частотою wk ).Запропонований спосіб, використаний у пристрої на Фіг.5, забезпечує додаткове спрощення технічної реалізації пристрою для здійснення векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача. Це досягається: по-перше, за рахунок зменшення кількості контрольованих у пристрої параметрів (тому що контролюються ЕРС і струми на стороні змінного струму у двох фазах замість трьох); подруге, за рахунок спрощення застосовуваних обчислювальних операцій (при визначенні проекцій узагальнених векторів ЕРС і відхилень проекцій струму стали використатися більш прості операції додавання й розподілу - замість множення, додавання й знаходження тригонометричних функцій синуса й косинуса від аргументу Q k осі абсцис координатної системи «ху»); по-третє, внаслідок спрощення технічної реалізації уточненого варіанта обчислювача проекцій результуючої напруги 27, показаного на Фіг.2 (оскільки при використанні нерухомої ортогональної координатної системи з кутовою w частотою k = 0 виключаються зі складу цього обчислювача в схемі на Фіг.2: датчик частоти 43 і блоки множення 40 і 41). Через зазначене технічне спрощення в пристрої на Фіг.5 скорочується загальна кількість датчиків і можливе застосування менш потужного обчислювача, що 27 приводить до додаткового здешевлення цього пристрою. Виходячи з вищевикладеного, можна зробити висновок, що рішення, яке заявляється, задовольняє критерію [«Промислове застосування».Джерела інформації:1. Волков А.В. Оптимальное по быстродействию векторное регулирование статорного тока частотноуправляемых асинхронных электроприводах с широтно-импульсной модуляцией // Электротехника, 2003, №12, С. 34-43.2. Волков А.В., Бондаренко В.И., Волков В.А. Релейное регулирование тока в активном фильтре напряжения // Вісник КДПУ, 2007, вип. 4 (45), 4.1, С. 70-74.3. Волков А.В., Пивняк Г.Г. Современные частотно-регулируемые асинхронные электроприводы с широтно-импульсной модуляцией. -Дніпропетровськ: НГУ, 2006.-470с.]. 30472 28
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for vector current control at the side of alternation current of a three-phase four quadrant converter
Автори англійськоюVolkov Oleksandr Vasyliovych, Volkov Volodymyr Oleksandrovych
Назва патенту російськоюСпособ векторного регулирования тока на стороне переменного тока трехфазного четырехквадрантного преобразователя
Автори російськоюВолков Александр Васильевич, Волков Владимир Александрович
МПК / Мітки
МПК: H02P 7/00, H02P 21/00
Мітки: спосіб, чотириквадрантного, стороні, перетворювача, векторного, змінного, трифазного, регулювання, струму
Код посилання
<a href="https://ua.patents.su/14-30472-sposib-vektornogo-regulyuvannya-strumu-na-storoni-zminnogo-strumu-trifaznogo-chotirikvadrantnogo-peretvoryuvacha.html" target="_blank" rel="follow" title="База патентів України">Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача</a>
Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються
Номер патенту: 30471
Опубліковано: 25.02.2008
Автори: Волков Олександр Васильович, Косенко Ігор Олександрович
МПК: H02P 7/00, H02P 21/00
Мітки: векторного, електроприводі, трифазним, асинхронному, замикаються, тиристорах, регулювання, автономним, інвертором, спосіб, струму
Формула / Реферат:
1. Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, який полягає у тому, що задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора...
Спосіб регулювання величини напруги змінного струму
Номер патенту: 28297
Опубліковано: 10.12.2007
Автори: Калугін Віталій Володимирович, Костенко Костянтин Федорович, Богачев Олександр Миколайович, Мицкевич Олександр Сергійович
МПК: H02M 5/02
Мітки: напруги, регулювання, величини, змінного, струму, спосіб
Формула / Реферат:
Спосіб регулювання величини напруги змінного струму, за яким здійснюють перетворення напруги у послідовність біполярних імпульсів значно більш високої частоти відносно частоти вхідної напруги змінного струму, тривалість яких визначає величину напруги, що регулюється, а зазначене перетворення здійснюють шляхом протифазного замикання і розмикання двох ключів, який відрізняється тим, що напругу змінного струму подають на вхід 2 паралельного реле...
Розподільна електрична мережа трифазного змінного струму напругою 950 вольт
Номер патенту: 69054
Опубліковано: 16.08.2004
Автор: Соломчак Олег Володимирович
МПК: H02J 3/00
Мітки: розподільна, струму, вольт, напругою, електрична, мережа, трифазного, змінного
Формула / Реферат:
1. Розподільна електрична мережа трифазного змінного струму, яка містить знижувальну трансформаторну підстанцію, лінію електропередач, адресні підстанції, яка відрізняється тим, що використано знижувальну трансформаторну підстанцію напругою 10(6)/1 кВ, до якої приєднано лінії трифазного змінного струму з ізольованим нулем напругою 950 В, до якої приєднані абонентські компактні трифазні підстанції із сухими трансформаторами напругою 0,95/0,4...
Спосіб обмеження вихідних струмів трифазного мостового інвертора напруги з широтно-імпульсним регулюванням вихідної напруги, який живить двигун змінного струму
Номер патенту: 20237
Опубліковано: 15.01.2007
Автори: Скалько Юрій Сергійович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: вихідної, змінного, мостового, обмеження, напруги, струмів, живить, двигун, струму, трифазного, вихідних, широтно-імпульсним, спосіб, регулюванням, інвертора
Формула / Реферат:
Спосіб обмеження вихідних струмів трифазного мостового інвертора з широтно-імпульсним регулюванням вихідної напруги, який живить двигун змінного струму, який полягає у тому, що контролюють вихідні фазні струми інвертора, порівнюють миттєві абсолютні значення кожного з контрольованих вихідних фазних струмів інвертора з припустимим для них граничним значенням, і якщо ці струми не перевищують граничного значення, задають відкриті і закриті стани...
Блочно – модульний пристрій регулювання напруги мережі змінного струму
Номер патенту: 37091
Опубліковано: 16.04.2001
Автори: Трунова Ірина Михайлівна, Савченко Петро Ілліч
МПК: G05F 1/22, H02M 5/02, H02J 3/12
Мітки: пристрій, регулювання, змінного, модульний, блочно, мережі, напруги, струму
Текст:
...шляхом паралельного з'єднання послідовних обмоток однофазних ВДТ і за допомогою комутуючих пристроїв 12, 15 між вхідним і вихідним кін цями пристрою, а також за допомогою комутуючих пристроїв 20-37 шляхом приєднання кінців обмоток збудження до вхідних кінців пристрою (на лінійну або на фазну напругу тієї ж фази, до якої приєднані відповідні послідовні обмотки, або на фазну напругу наступної за ходом годинника фази). Прохідна потужність в...
Попередній патент: Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються
Наступний патент: Сталь з демпфуючими властивостями
Випадковий патент: Диференціальний автомат, функціонально залежний від напруги живлення, комбінований