Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача
Номер патенту: 44892
Опубліковано: 26.10.2009
Автори: Антонов Микола Леонідович, Волков Володимир Олександрович, Волков Олександр Васильович


Формула / Реферат
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, який полягає в тому, що контролюють фазні електрорушійні сили (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис й ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС та прогнозовані значення проекцій узагальненого вектора напруги, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, у вигляді різниці згаданих прогнозованих проекцій узагальненого вектора напруги й узагальненого вектора ЕРС обчислюють прогнозовані значення проекцій результуючого вектора напруги на відповідні осі даної ортогональної координатної системи при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі зазначеної ортогональної координатної системи узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення першого прогнозуючого функціонала, з розрахованих значень якого знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій узагальненого вектора струму для сталих режимів роботи перетворювача, порівнюють контрольовані відхилення проекцій узагальненого вектора струму із границями допустимої для них області відхилень, причому, якщо контрольовані відхилення проекцій узагальненого вектора струму перебувають усередині припустимої області, то підтримують незмінною комбінацію відкритих і закритих силових ключів перетворювача, а, якщо виходять за межі припустимої області, то задають нову комбінацію відкритих і закритих силових ключів перетворювача такою, яка відповідає знайденому екстремальному значенню першого прогнозуючого функціонала, який відрізняється тим, що при умові знаходжень контрольованих відхилень усередині припустимої області, на границях зазначеної припустимої області відхилень для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують значення другого прогнозуючого функціонала, з розрахованих значень яких знаходять екстремальне значення даного функціонала, при цьому усередині зазначеної припустимої області задають нову комбінацію силових ключів перетворювача такою, яка відповідає екстремальному значенню другого прогнозуючого функціонала.
2. Спосіб за п. 1, який відрізняється тим, що від джерела постійної напруги подають живлення до сторони постійного струму чотириквадрантного перетворювача, у якому сторону змінного струму навантажують на асинхронний короткозамкнений двигун, причому як ЕРС контролюють наведені до статора фазні ЕРС ротора зазначеного двигуна, які обчислюють у вигляді різниці між відповідною фазною напругою, контрольованою на стороні змінного струму перетворювача, й сумою двох доданків, перший з яких розраховують у вигляді добутку активного опору статора двигуна на значення струму, контрольованого на стороні змінного струму в даній фазі перетворювача, а другий доданок визначають у вигляді добутку похідної за часом від цього струму на значення сумарної індуктивності розсіювання статора й ротора двигуна, при цьому зазначену ортогональну координатну систему "х-у" орієнтують віссю абсцис "х" по узагальненому вектору потокозчеплення ротора двигуна, згадану припустиму область відхилень ![]() проекцій узагальненого вектора струму в сталих режимах задають наступними співвідношеннями:
проекцій узагальненого вектора струму в сталих режимах задають наступними співвідношеннями:
![]() (1)
(1)
формують гістерезисного типу релейні функції fx й fу, знаки яких змінюються при виході відхилень проекцій за межі припустимої області згідно з полярністю відповідного відхилення ![]() або
або ![]() проекції узагальненого вектора струму, задають перший прогнозуючий функціонал співвідношеннями:
проекції узагальненого вектора струму, задають перший прогнозуючий функціонал співвідношеннями:
![]() (2)
(2)
визначають екстремальне значення цього функціонала у вигляді його максимуму
![]() (3)
(3)
де ![]() - прогнозовані значення проекцій результуючого вектора напруги відповідно на осі абсцис й ординат ортогональної координатної системи;
- прогнозовані значення проекцій результуючого вектора напруги відповідно на осі абсцис й ординат ортогональної координатної системи;
![]() й
й ![]() - відповідно можлива й відповідна екстремальному значенню першого функціонала комбінація відкритих і закритих силових ключів перетворювача, причому задають другий функціонал наступними залежностями:
- відповідно можлива й відповідна екстремальному значенню першого функціонала комбінація відкритих і закритих силових ключів перетворювача, причому задають другий функціонал наступними залежностями:
 (4)
(4)
а його екстремальне значення знаходять у вигляді максимуму
![]() (5)
(5)
де ![]() або
або ![]() - контрольовані на границях припустимої області значення відхилень проекцій узагальненого вектора струму відповідно на осі абсцис й ординат ортогональної координатної системи;
- контрольовані на границях припустимої області значення відхилень проекцій узагальненого вектора струму відповідно на осі абсцис й ординат ортогональної координатної системи; ![]() - обчислені на границях припустимої області для m-ої комбінації відкритих і закритих силових ключів перетворювача значення проекцій результуючого вектора напруги відповідно на осі абсцис й ординат ортогональної координатної системи; m2 - відповідна екстремальному значенню другого функціонала комбінація відкритих та закритих силових ключів перетворювача.
- обчислені на границях припустимої області для m-ої комбінації відкритих і закритих силових ключів перетворювача значення проекцій результуючого вектора напруги відповідно на осі абсцис й ординат ортогональної координатної системи; m2 - відповідна екстремальному значенню другого функціонала комбінація відкритих та закритих силових ключів перетворювача.
3. Спосіб за п. 1, який відрізняється тим, що з боку змінного струму чотириквадрантного перетворювача подають живлення безпосередньо або через реактори від джерела трифазної напруги мережі, а як згадані фазні значення ЕРС контролюють фазні напруги зазначеного джерела трифазної напруги мережі, обчислюють у вигляді кореня квадратного із суми квадратів згаданих відхилень проекцій струму модуль узагальненого вектора відхилення струму, який порівнюють із установленою величиною, що задає собою границі припустимої області цих відхилень у сталих режимах, при цьому у вигляді відношень відхилень проекцій струму на осі абсцис й ординат ортогональної координатної системи до модуля узагальненого вектора відхилення струму визначають значення відповідно косинуса й синуса від аргумента цього вектора, для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують у вигляді кореня квадратного із суми квадратів його проекцій значення модуля результуючого вектора напруги, у вигляді відношень проекцій результуючого вектора напруги на осі абсцис й ординат ортогональної координатної системи до його модуля обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення відповідно косинуса й синуса від аргумента цього вектора, при цьому перший прогнозуючий функціонал розраховують у вигляді суми двох доданків, перший з яких являє собою добуток косинусів від аргументів результуючого вектора напруги й узагальненого вектора відхилення струму, а другий доданок - добуток синусів від аргументів тих же векторів, для яких відлік аргументів виконують від осі абсцис згаданої ортогональної координатної системи, що задають нерухомою з орієнтацією осі абсцис за геометричною віссю обмотки, що створює ЕРС у фазі А на стороні змінного струму перетворювача, причому задають другий прогнозуючий функціонал наступними залежностями:
![]() (6)
(6)
а його екстремальне значення знаходять у вигляді максимуму
![]() (7)
(7)
де ![]() або
або ![]() - значення відхилень проекцій узагальненого вектора струму відповідно на осі абсцис й ординат ортогональної координатної системи, контрольовані на границях припустимої області;
- значення відхилень проекцій узагальненого вектора струму відповідно на осі абсцис й ординат ортогональної координатної системи, контрольовані на границях припустимої області; ![]() - значення проекцій результуючого вектора напруги на осі абсцис й ординат ортогональної координатної системи, обчислені на границях припустимої області для m-ої комбінації відкритих і закритих силових ключів перетворювача; m2 - відповідна екстремальному значенню другого функціонала комбінація відкритих й закритих силових ключів перетворювача.
- значення проекцій результуючого вектора напруги на осі абсцис й ординат ортогональної координатної системи, обчислені на границях припустимої області для m-ої комбінації відкритих і закритих силових ключів перетворювача; m2 - відповідна екстремальному значенню другого функціонала комбінація відкритих й закритих силових ключів перетворювача.
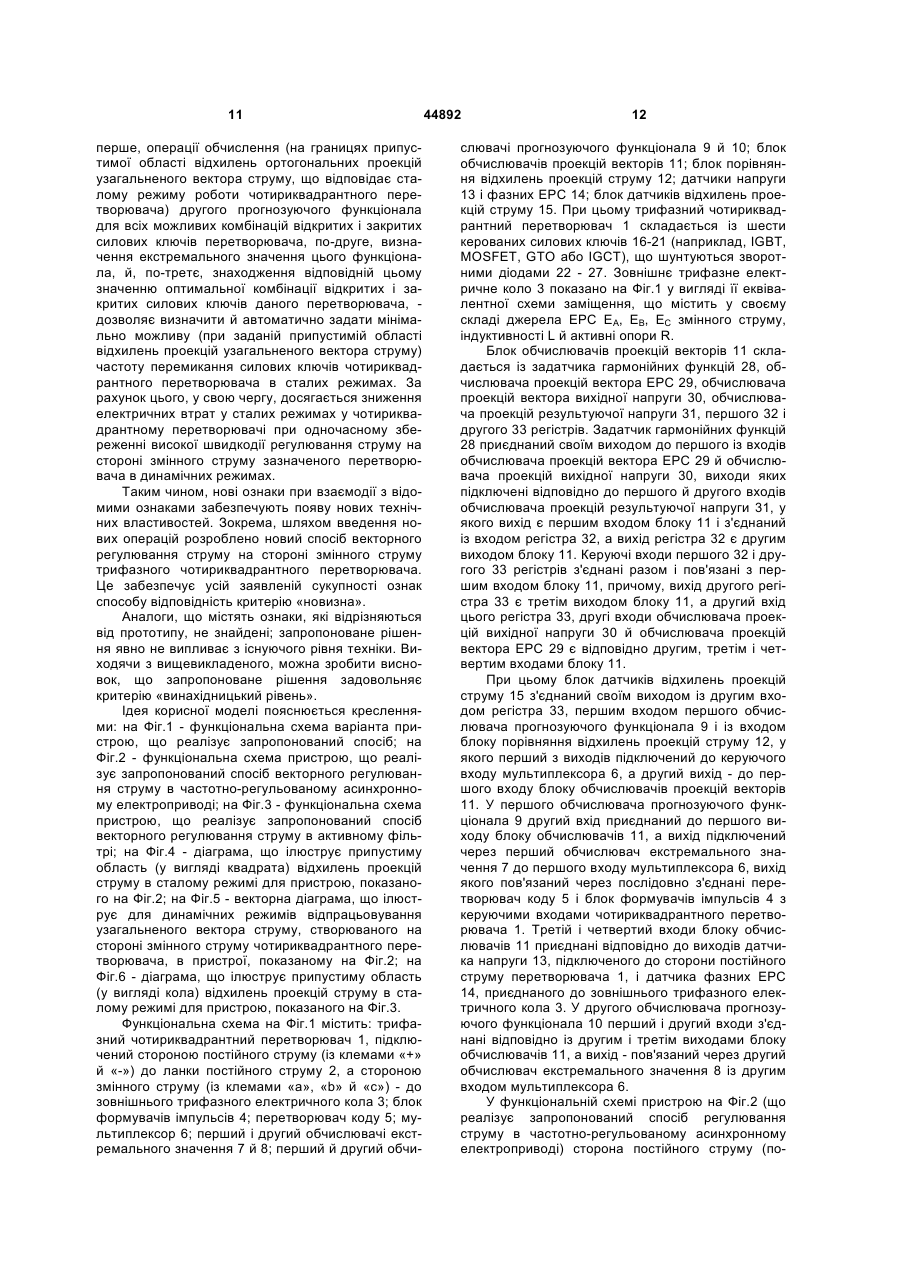
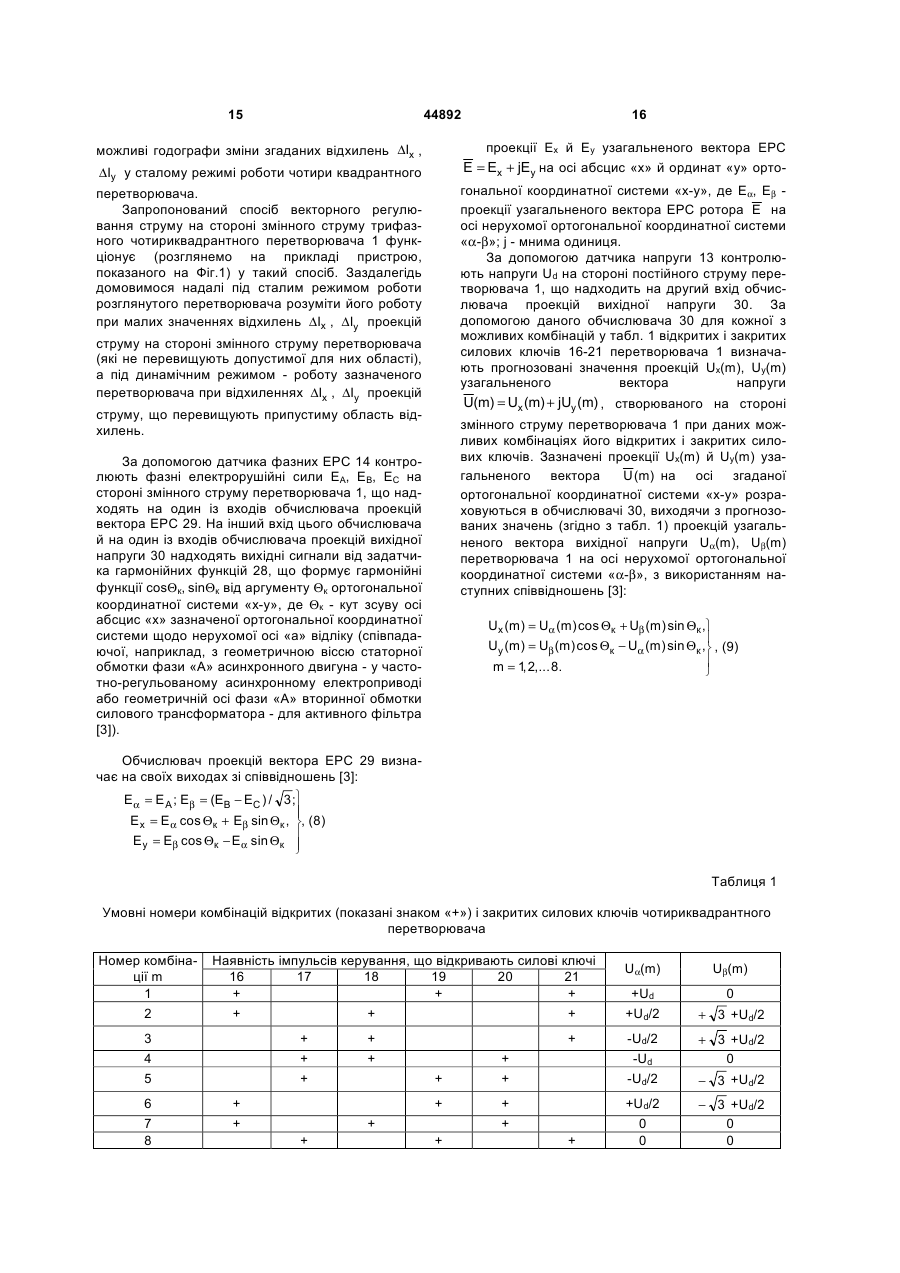
Текст
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, який полягає в тому, що контролюють фазні електрорушійні сили (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис й ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС та прогнозовані значення проекцій узагальненого вектора напруги, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, у вигляді різниці згаданих прогнозованих проекцій узагальненого вектора напруги й узагальненого вектора ЕРС обчислюють прогнозовані значення проекцій результуючого вектора напруги на відповідні осі даної ортогональної координатної системи при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі зазначеної ортогональної координатної системи узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення першого прогнозуючого функціонала, з розрахованих значень якого знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій узагальненого вектора струму для сталих режимів роботи перетворювача, порівнюють контрольовані відхилення проекцій узагальненого вектора струму із границями допустимої для них області відхилень, причому, якщо контрольовані відхилення проекцій узагальненого вектора струму перебувають усередині припустимої області, то підтриму 2 (19) 1 3 44892 fу, знаки яких змінюються при виході відхилень проекцій за межі припустимої області згідно з полярністю відповідного відхилення ∆Ix або ∆Iy проекції узагальненого вектора струму, задають перший прогнозуючий функціонал співвідношеннями: F1(m) = K1fy ∆Uy (m), ⎫ ⎬, (2) K1 = 1 + sin g[ fx ∆Ux (m)]⎭ визначають екстремальне значення цього функціонала у вигляді його максимуму 0 F1 = {F1(m)} при m = m1, (3) де ∆Ux (m), ∆Uy (m) - прогнозовані значення проекцій результуючого вектора напруги відповідно на осі абсцис й ординат ортогональної координатної системи; m й m1 - відповідно можлива й відповідна екстремальному значенню першого функціонала комбінація відкритих і закритих силових ключів перетворювача, причому задають другий функціонал наступними залежностями: ⎫ ⎪ F2 (m) = min F2 x (m), F2 y (m) , ⎪ ∆Ix 0 + sin g[ ∆Ux 0 (m)] h ⎪ ⎪ F2 x (m) = ,⎬, (4) ∆Ux 0 (m) ⎪ ∆Iy 0 + sin g[ ∆Uy 0 (m)] h ⎪ F2 y (m) = ⎪ ∆Uy 0 (m) ⎪ ⎭ а його екстремальне значення знаходять у вигляді максимуму { { { } } } 0 F2 = {F2 (m)} при m = m2, (5) де ∆Ix 0 або ∆Iy 0 - контрольовані на границях припустимої області значення відхилень проекцій узагальненого вектора струму відповідно на осі абсцис й ординат ортогональної координатної системи; ∆Ux 0 (m) i ∆Uy 0 (m) - обчислені на границях припустимої області для m-ої комбінації відкритих і закритих силових ключів перетворювача значення проекцій результуючого вектора напруги відповідно на осі абсцис й ординат ортогональної координатної системи; m2 - відповідна екстремальному значенню другого функціонала комбінація відкритих та закритих силових ключів перетворювача. 3. Спосіб за п. 1, який відрізняється тим, що з боку змінного струму чотириквадрантного перетворювача подають живлення безпосередньо або через реактори від джерела трифазної напруги мережі, а як згадані фазні значення ЕРС контролюють фазні напруги зазначеного джерела трифазної напруги мережі, обчислюють у вигляді кореня Корисна модель відноситься до області електротехніки, конкретно - до частотно-регульованих асинхронних електроприводів й активних фільтрів, у яких відповідно в якості автономного інвертора напруги або активного випрямляча використову 4 квадратного із суми квадратів згаданих відхилень проекцій струму модуль узагальненого вектора відхилення струму, який порівнюють із установленою величиною, що задає собою границі припустимої області цих відхилень у сталих режимах, при цьому у вигляді відношень відхилень проекцій струму на осі абсцис й ординат ортогональної координатної системи до модуля узагальненого вектора відхилення струму визначають значення відповідно косинуса й синуса від аргумента цього вектора, для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують у вигляді кореня квадратного із суми квадратів його проекцій значення модуля результуючого вектора напруги, у вигляді відношень проекцій результуючого вектора напруги на осі абсцис й ординат ортогональної координатної системи до його модуля обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення відповідно косинуса й синуса від аргумента цього вектора, при цьому перший прогнозуючий функціонал розраховують у вигляді суми двох доданків, перший з яких являє собою добуток косинусів від аргументів результуючого вектора напруги й узагальненого вектора відхилення струму, а другий доданок - добуток синусів від аргументів тих же векторів, для яких відлік аргументів виконують від осі абсцис згаданої ортогональної координатної системи, що задають нерухомою з орієнтацією осі абсцис за геометричною віссю обмотки, що створює ЕРС у фазі А на стороні змінного струму перетворювача, причому задають другий прогнозуючий функціонал наступними залежностями: ∆Ix 0 ∆Ux 0 (m) + ∆Iy 0 ∆Uy 0 (m) F2 (m) = , (6) ∆U2 0 (m) + ∆U2 0 (m) x y а його екстремальне значення знаходять у вигляді максимуму 0 F2 = {F2 (m)} при m = m2, (7) де ∆Ix 0 або ∆Iy 0 - значення відхилень проекцій узагальненого вектора струму відповідно на осі абсцис й ординат ортогональної координатної системи, контрольовані на границях припустимої області; ∆Ux 0 (m) i ∆Uy 0 (m) - значення проекцій результуючого вектора напруги на осі абсцис й ординат ортогональної координатної системи, обчислені на границях припустимої області для m-ої комбінації відкритих і закритих силових ключів перетворювача; m2 - відповідна екстремальному значенню другого функціонала комбінація відкритих й закритих силових ключів перетворювача. ється трифазний чотириквадрантний перетворювач із широтно-імпульсною модуляцією. Векторне регулювання змінного струму чотириквадрантного перетворювача призначено для формування фазних струмів на стороні змінного 5 струму зазначеного перетворювача як по амплітуді, так і по частоті й фазі, і полягає у відпрацьовуванні заданих значень проекцій (на осі нерухомої або обертової ортогональної координатної системи) узагальненого вектора струму, створюваного на стороні змінного струму даного перетворювача. Векторне регулювання струму на стороні змінного струму чотириквадрантного перетворювача служить: в активних фільтрах - для стабілізації на заданому рівні напруги на стороні постійного струму й формування необхідного значення коефіцієнта потужності на стороні змінного струму зазначеного перетворювача, а в частотно-регульованих електроприводах - для стабілізації в динамічних і сталих режимах заданих значень потокозчеплення й електромагнітного моменту асинхронного двигуна. Відомий з [1] спосіб оптимального по швидкодії векторного регулювання статорного струму асинхронного двигуна, що живиться від автономного інвертора напруги, виконаного у вигляді трифазного чотириквадрантного перетворювача, що полягає в тому, що контролюють напругу на стороні постійного струму й фазні струми на стороні змінного струму зазначеного перетворювача, через які розраховують на осі абсцис й ординат нерухомої ортогональної координатної системи проекції узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, і обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів чотириквадрантного перетворювача прогнозовані значення проекцій на зазначені осі координатної системи узагальненого вектора напруги, створюваного на стороні змінного струму перетворювача, за допомогою моделі асинхронного двигуна через обчислені значення проекцій узагальнених векторів напруг і струму на стороні змінного струму перетворювача визначають на осі нерухомої ортогональної координатної системи проекції зведених до статора узагальнених векторів ЕРС ротора й потокозчеплення ротора двигуна, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача прогнозовані значення проекцій результуючого вектора напруги на осі нерухомої ортогональної координатної системи у вигляді різниці відповідних проекцій на осі абсцис й ординат цієї координатної системи узагальненого вектора напруги, створюваного на стороні змінного струму перетворювача, і узагальненого вектора ЕРС ротора двигуна, знаходять у вигляді кореня квадратного із суми квадратів його проекцій значення модуля узагальненого вектора потокозчеплення ротора двигуна, обчислюють у вигляді відношень проекцій цього вектора на осі абсцис й ординат нерухомої ортогональної координатної системи до його модуля значення відповідно косинуса і синуса від аргументу узагальненого вектора потокозчеплення ротора двигуна, за допомогою останніх значень розраховують проекції узагальненого вектора струму й результуючого вектора напруги на осі обертової ортогональної координатної системи, зв'язаною віссю абсцис із узагальненим вектором потокозчеплення ротора двигуна, визначають відхилення між модулем, проекціями 44892 6 на осі обертової ортогональної координатної системи і їх відповідними заданими значеннями, причому, якщо вказані відхилення для модуля й проекцій узагальненого вектора струму не перевищують встановленої величини, то зберігають колишню комбінацію відкритих і закритих силових ключів перетворювача, а якщо перевищують встановлену величину, то - задають нову комбінацію відкритих і закритих силових ключів даного перетворювача, що задовольняє таким умовам: по-перше, збігаються знаки відхилень проекцій узагальненого вектора струму зі знаками проекцій на відповідні осі обертової координатної системи узагальненого вектора результуючої напруги, і по-друге, при зазначеній новій комбінації відкритих і закритих силових ключів перетворювача дорівнює екстремальному значенню проекція результуючого вектора напруги на вісь ординат обертової ортогональної координатної системи. Поряд з досяжною високою швидкодією векторного регулювання струму, недоліком відомого способу є підвищена частота перемикання (до 510кГц й вище) силових ключів чотириквадрантного перетворювача (у тому числі, у стаціонарних режимах роботи електропривода), що викликає на практиці збільшення динамічних втрат у силових ключах даного перетворювача. Це, у свою чергу, економічно невиправдано для більшості частотнорегульованих асинхронних електроприводів середньої (понад 100кВт) і великої (понад 1000кВт) потужності, до яких звичайно не пред'являються підвищені вимоги за швидкодією регулювання струму, але дуже важливі й актуальні питання енергозбереження. Найбільш близьким по технічній сутності до запропонованого способу обрано спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, що полягає в тому, що контролюють фазну електрорушійну силу (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис й ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС і прогнозовані значення проекцій узагальненого вектора напруги, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, обчислюють у вигляді різниці проекцій узагальненого вектора ЕРС й узагальненого вектора напруги на відповідні осі даної ортогональної координатної системи прогнозовані значення проекцій результуючого вектора напруги при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі зазначеної ортогональної координатної системи узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, вісь абсцис згаданої ортогональної координатної системи приймають за вісь відліку аргументів узагальнених векторів, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення прогнозуючого функціонала, при цьому з розрахованих значень прогно 7 зуючого функціонала знаходять його екстремальне значення й визначають нову комбінацію відкритих і закритих силових ключів перетворювача, що відповідає зазначеному екстремальному значенню функціонала, обчислюють у вигляді кореня квадратного із суми квадратів згаданих відхилень проекцій струму модуль узагальненого вектора відхилення струму, що порівнюють із встановленою величиною, причому, якщо обчислене значення зазначеного модуля узагальненого вектора відхилення струму не перевищує встановленої величини, то зберігають колишню комбінацію відкритих і закритих силових ключів перетворювача, а якщо воно перевищує встановлену величину, то задають нову комбінацію відкритих і закритих силових ключів даного перетворювача, причому, у вигляді відношень відхилень проекцій струму на осі абсцис й ординат ортогональної координатної системи до модуля узагальненого вектора відхилення струму визначають значення відповідно косинуса й синуса від аргументу цього вектора, для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують у вигляді кореня квадратного із суми квадратів його проекцій значення модуля результуючого вектора напруги, у вигляді відношень проекцій результуючого вектора напруги на осі абсцис й ординат ортогональної координатної системи до його модуля обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення відповідно косинуса й синуса від аргументу цього вектора, при цьому прогнозуючого функціонала розраховують у вигляді двох доданків, перше з яких являє собою добуток косинусів від аргументів результуючого вектора напруги й узагальненого вектора відхилення струму, а другий доданок добуток синусів від аргументів тих же векторів. Перевагою даного відомого способу (у порівнянні зі способом векторного регулювання струму з [1]) є зменшена частота переключення силових ключів перетворювача в сталих режимах. Однак, останньому відомому пристрою при цьому властивий такий недолік, як збільшене значення частоти перемикання силових ключів чотириквадрантного перетворювача в сталих режимах, що, у свою чергу, приводить до завищених електричних втрат у даному перетворювачі в зазначених режимах. В основі корисної моделі поставлене завдання розробки способу векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, що забезпечує зниження до мінімально можливого значення частоти перемикання силових ключів чотириквадрантного перетворювача в сталих режимах роботи при заданій амплітуді високочастотних пульсацій струму на стороні змінного струму перетворювача. За рахунок цього, у свою чергу, досягається зменшення електричних втрат у чотириквадрантному перетворювачі (а, отже, і в частотнорегульованому електроприводі або активному фільтрі, побудованих на його основі) у сталих режимах при одночасному збереженні відносно високої швидкодії регулювання струму на стороні змінного струму зазначеного перетворювача в динамічних режимах. 44892 8 Розв'язання даного завдання досягається тим, що в способі векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, який полягає в тому, що контролюють фазні електрорушійні сили (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис й ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС та прогнозовані значення проекцій узагальненого вектора напруги, створюваного на стороні змінного струму зазначеного перетворювача при всіх можливих комбінаціях його відкритих і закритих силових ключів, в виді різниці згаданих прогнозованих проекцій узагальненого вектора напруги й узагальненого вектора ЕРС обчислюють прогнозовані значення проекцій результуючого вектора напруги на відповідні осі даної ортогональної координатної системи при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача, контролюють відхилення між заданими й фактичними значеннями проекцій на осі зазначеної ортогональної координатної системи узагальненого вектора струму, створюваного на стороні змінного струму перетворювача, розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетвопрогнозуючого рювача значення першого функціонала, з розрахованих значень якого знаходять екстремальне значення даного функціонала, задають припустиму область відхилень проекцій узагальненого вектора струму для сталих режимів роботи перетворювача, порівнюють контрольовані відхилення проекцій узагальненого вектора струму із границями припустимої для них області відхилень, причому, якщо контрольовані відхилення проекцій узагальненого вектора струму перебувають усередині припустимої області, то - підтримують незмінною комбінацію відкритих і закритих силових ключів перетворювача, а, якщо виходять за межі припустимої області, то - задають нову комбінацію відкритих і закритих силових ключів перетворювача такою, яка відповідає знайденому екстремальному значенню першого прогнозуючого функціонала, додатково, якщо контрольовані відхилення перебувають усередині припустимої області, то на границях зазначеної припустимої області відхилень для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують значення другого прогнозуючого функціонала, з розрахованих значень яких знаходять екстремальне значення даного функціонала, при цьому усередині зазначеної припустимої області задають нову комбінацію силових ключів перетворювача такою, яка відповідає екстремальному значенню другого прогнозуючого функціонала. Для використання запропонованого способу векторного регулювання струму в частотнорегульованих асинхронних електроприводах у способі по п. 1 додатково від джерела постійної напруги подають живлення до сторони постійного струму чотириквадрантного перетворювача, у якому сторону змінного струму навантажують на асинхронний короткозамкнений двигун, причому, у 9 44892 } значенню другого функціоналу комбінація відкритих та закритих силових ключів перетворювача. Для використання запропонованого способу векторного регулювання струму в активних фільтрах у способі по п.1 додатково з боку змінного струму чотириквадрантного перетворювача подають живлення безпосередньо або через реактори від джерела трифазної напруги мережі, а в якості згаданих фазних значень ЕРС контролюють фазні напруги зазначеного джерела трифазної напруги мережі, обчислюють у вигляді кореня квадратного із суми квадратів згаданих відхилень проекцій струму модуль узагальненого вектора відхилення струму, який порівнюють із установленою величиною, що задає собою границі припустимої області цих відхилень у сталих режимах, при цьому у вигляді відношень відхилень проекцій струму на осі абсцис й ординат ортогональної координатної системи до модуля узагальненого вектора відхилення струму визначають значення відповідно косинуса й синуса від аргументу цього вектора, для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача розраховують у вигляді кореня квадратного із суми квадратів його проекцій значення модуля результуючого вектора напруги, у вигляді відношень проекцій результуючого вектора напруги на осі абсцис й ординат ортогональної координатної системи до його модуля обчислюють для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення відповідно косинуса й синуса від аргументу цього вектора, при цьому перший прогнозуючий функціонал розраховують у вигляді суми двох доданків, перший з яких являє собою добуток косинусів від аргументів результуючого вектора напруги й узагальненого вектора відхилення струму, а другий доданок - добуток синусів від аргументів тих же векторів, для яких відлік аргументів роблять від осі абсцис згаданої ортогональної координатної системи, що задають нерухомою з орієнтацією осі абсцис за геометричною віссю обмотки, що створює ЕРС у фазі А на стороні змінного струму перетворювача, причому, задають другий прогнозуючий функціонал наступними залежностями: ∆Ix 0 ∆Ux 0 (m) + ∆Iy 0 ∆Uy 0 (m) F2 (m) = , (6) ∆U2 0 (m) + ∆U2 0 (m) x y } а його екстремальне значення знаходять у вигляді максимуму якості ЕРС контролюють наведені до статора фазні ЕРС ротора зазначеного двигуна, які обчислюють у вигляді різниці між відповідною фазною напругою, контрольованою на стороні змінного струму перетворювача, й сумою двох доданків, перший з яких розраховують у вигляді добутку активного опору статора двигуна на значення струму, контрольованого на стороні змінного струму в даній фазі перетворювача, а другий доданок визначають у вигляді добутку похідної за часом від цього струму на значення сумарної індуктивності розсіювання статора й ротора двигуна, при цьому зазначену ортогональну координатну систему «ху» орієнтують віссю абсцис «х» по узагальненому вектору потокозчеплення ротора двигуна, згадану припустиму область відхилень ∆Ix , ∆Iy проекцій узагальненого вектора струму в сталих режимах задають наступними співвідношеннями: − h ≤ ∆Ix ≤ + h i − h ≤ ∆Iy ≤ + h, (1) формують гістерезисного типу релейні функції fx й fу, знаки яких змінюються при виході відхилень проекцій за межі припустимої області згідно з полярністю відповідного відхилення ∆Ix або ∆Iy проекції узагальненого вектора струму, задають перший прогнозуючий функціонал співвідношеннями: F1(m) = K1fy ∆Uy (m), ⎫ ⎬, (2) K1 = 1 + sign[ fx ∆Ux (m)]⎭ визначають екстремальне значення цього функціонала у вигляді його максимуму 0 F1 = {F1(m)} при m = m1, (3) де ∆Ux (m ), ∆Uy (m ) - прогнозовані значення проекцій результуючого вектора напруги відповідно на осі абсцис й ординат ортогональної координатної системи; m й m1 - відповідно можлива й відповідна екстремальному значенню першого функціонала комбінація відкритих і закритих силових ключів перетворювача, причому, задають другий функціонал наступними залежностями: ⎫ ⎪ F2 (m) = min F2 x (m), F2 y (m) , ⎪ ∆Ix 0 + sign[ ∆Ux 0(m)] h ⎪ ⎪ F2 x (m) = ,⎬, (4) ∆Ux 0 (m) ⎪ ∆Iy 0 + sign[ ∆Uy 0 (m)] h ⎪ F2 y (m) = ⎪ ∆Uy 0 (m) ⎪ ⎭ а його екстремальне значення знаходять у вигляді максимуму { { { } 10 0 F2 = {F2 (m)} при m = m2, (5) де ∆Ix 0 або ∆Iy 0 - контрольовані на границях припустимої області значення відхилень проекцій узагальненого вектора струму відповідно на осі абсцис й ординат ортогональної координатної системи; ∆Ux 0 (m) i ∆Uy 0 (m) - обчислені на границях припустимої області для m-ої комбінації відкритих і закритих силових ключів перетворювача значення проекцій результуючого вектора напруги відповідно на осі абсцис й ординат ортогональної координатної системи; m2 - відповідна екстремальному 0 F2 = {F2 (m)} при m = m2, (7) де ∆Ix 0 або ∆Iy 0 - значення відхилень проекцій узагальненого вектора струму відповідно на осі абсцис й ординат ортогональної координатної системи, контрольовані на границях припустимої області; ∆Ux 0 (m) i ∆Uy 0 (m) - значення проекцій результуючого вектора напруги на осі абсцис й ординат ортогональної координатної системи, обчислені на границях припустимої області для m-ої комбінації відкритих і закритих силових ключів перетворювача; m2 – відповідна екстремальному значенню другого функціоналу комбінація відкритих й закритих силових ключів перетворювача. Здійснення в запропонованому способі: по 11 перше, операції обчислення (на границях припустимої області відхилень ортогональних проекцій узагальненого вектора струму, що відповідає сталому режиму роботи чотириквадрантного перетворювача) другого прогнозуючого функціонала для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача, по-друге, визначення екстремального значення цього функціонала, й, по-третє, знаходження відповідній цьому значенню оптимальної комбінації відкритих і закритих силових ключів даного перетворювача, дозволяє визначити й автоматично задати мінімально можливу (при заданій припустимій області відхилень проекцій узагальненого вектора струму) частоту перемикання силових ключів чотириквадрантного перетворювача в сталих режимах. За рахунок цього, у свою чергу, досягається зниження електричних втрат у сталих режимах у чотириквадрантному перетворювачі при одночасному збереженні високої швидкодії регулювання струму на стороні змінного струму зазначеного перетворювача в динамічних режимах. Таким чином, нові ознаки при взаємодії з відомими ознаками забезпечують появу нових технічних властивостей. Зокрема, шляхом введення нових операцій розроблено новий спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача. Це забезпечує усій заявленій сукупності ознак способу відповідність критерію «новизна». Аналоги, що містять ознаки, які відрізняються від прототипу, не знайдені; запропоноване рішення явно не випливає з існуючого рівня техніки. Виходячи з вищевикладеного, можна зробити висновок, що запропоноване рішення задовольняє критерію «винахідницький рівень». Ідея корисної моделі пояснюється кресленнями: на Фіг.1 - функціональна схема варіанта пристрою, що реалізує запропонований спосіб; на Фіг.2 - функціональна схема пристрою, що реалізує запропонований спосіб векторного регулювання струму в частотно-регульованому асинхронному електроприводі; на Фіг.3 - функціональна схема пристрою, що реалізує запропонований спосіб векторного регулювання струму в активному фільтрі; на Фіг.4 - діаграма, що ілюструє припустиму область (у вигляді квадрата) відхилень проекцій струму в сталому режимі для пристрою, показаного на Фіг.2; на Фіг.5 - векторна діаграма, що ілюструє для динамічних режимів відпрацьовування узагальненого вектора струму, створюваного на стороні змінного струму чотириквадрантного перетворювача, в пристрої, показаному на Фіг.2; на Фіг.6 - діаграма, що ілюструє припустиму область (у вигляді кола) відхилень проекцій струму в сталому режимі для пристрою, показаного на Фіг.3. Функціональна схема на Фіг.1 містить: трифазний чотириквадрантний перетворювач 1, підключений стороною постійного струму (із клемами «+» й «-») до ланки постійного струму 2, а стороною змінного струму (із клемами «а», «b» й «с») - до зовнішнього трифазного електричного кола 3; блок формувачів імпульсів 4; перетворювач коду 5; мультиплексор 6; перший і другий обчислювачі екстремального значення 7 й 8; перший й другий обчи 44892 12 слювачі прогнозуючого функціонала 9 й 10; блок обчислювачів проекцій векторів 11; блок порівняння відхилень проекцій струму 12; датчики напруги 13 і фазних ЕРС 14; блок датчиків відхилень проекцій струму 15. При цьому трифазний чотириквадрантний перетворювач 1 складається із шести керованих силових ключів 16-21 (наприклад, IGBT, MOSFET, GTO або IGCT), що шунтуються зворотними діодами 22 - 27. Зовнішнє трифазне електричне коло 3 показано на Фіг.1 у вигляді її еквівалентної схеми заміщення, що містить у своєму складі джерела ЕРС ЕA, ЕB, EC змінного струму, індуктивності L й активні опори R. Блок обчислювачів проекцій векторів 11 складається із задатчика гармонійних функцій 28, обчислювача проекцій вектора ЕРС 29, обчислювача проекцій вектора вихідної напруги 30, обчислювача проекцій результуючої напруги 31, першого 32 і другого 33 регістрів. Задатчик гармонійних функцій 28 приєднаний своїм виходом до першого із входів обчислювача проекцій вектора ЕРС 29 й обчислювача проекцій вихідної напруги 30, виходи яких підключені відповідно до першого й другого входів обчислювача проекцій результуючої напруги 31, у якого вихід є першим входом блоку 11 і з'єднаний із входом регістра 32, а вихід регістра 32 є другим виходом блоку 11. Керуючі входи першого 32 і другого 33 регістрів з'єднані разом і пов'язані з першим входом блоку 11, причому, вихід другого регістра 33 є третім виходом блоку 11, а другий вхід цього регістра 33, другі входи обчислювача проекцій вихідної напруги 30 й обчислювача проекцій вектора ЕРС 29 є відповідно другим, третім і четвертим входами блоку 11. При цьому блок датчиків відхилень проекцій струму 15 з'єднаний своїм виходом із другим входом регістра 33, першим входом першого обчислювача прогнозуючого функціонала 9 і із входом блоку порівняння відхилень проекцій струму 12, у якого перший з виходів підключений до керуючого входу мультиплексора 6, а другий вихід - до першого входу блоку обчислювачів проекцій векторів 11. У першого обчислювача прогнозуючого функціонала 9 другий вхід приєднаний до першого виходу блоку обчислювачів 11, а вихід підключений через перший обчислювач екстремального значення 7 до першого входу мультиплексора 6, вихід якого пов'язаний через послідовно з'єднані перетворювач коду 5 і блок формувачів імпульсів 4 з керуючими входами чотириквадрантного перетворювача 1. Третій і четвертий входи блоку обчислювачів 11 приєднані відповідно до виходів датчика напруги 13, підключеного до сторони постійного струму перетворювача 1, і датчика фазних ЕРС 14, приєднаного до зовнішнього трифазного електричного кола 3. У другого обчислювача прогнозуючого функціонала 10 перший і другий входи з'єднані відповідно із другим і третім виходами блоку обчислювачів 11, а вихід - пов'язаний через другий обчислювач екстремального значення 8 із другим входом мультиплексора 6. У функціональній схемі пристрою на Фіг.2 (що реалізує запропонований спосіб регулювання струму в частотно-регульованому асинхронному електроприводі) сторона постійного струму (по 13 значена клемами «+» й «-») чотириквадрантного перетворювача 1 підключена до джерела постійної напруги 34, а сторона змінного струму (позначена клемами «а», «b» й «с») - до асинхронного короткозамкненого двигуна 35 (показаному на Фіг.2 у вигляді його еквівалентної схеми заміщення, що містить послідовно з'єднані між собою: активний опір статора Rs, сумарну індуктивність розсіювання Lσ статора й ротора двигуна й зведену до статора фазну ЕРС ротора ЕA (EB або ЕC) двигуна). При цьому всі інші елементи і їхні зв'язки в пристрої на Фіг.2 повністю ідентичні раніше показаними в схемі пристрою на Фіг.1. Причому, у схемі пристрою на Фіг.2 перший обчислювач прогнозуючого функціонала 9 виконаний у вигляді першого й другого релейних елементів 36 й 37, першого й другого множних блоків 38 й 39, першого й другого множних блоків 38 й 39, першого обчислювального пристрою 40, вихід якого є виходом першого обчислювача прогнозуючого функціонала 9, а перший й другий входи обчислювального пристрою 40 приєднані до виходів відповідно першого й другого множних блоків 38 й 39, входи релейних елементів 36 й 37 пов'язані з першим входом обчислювача прогнозуючого функціонала 9, а виходи вказаних релейних елементів 38 й 39, другі входи яких зв'язані із другим входом першого обчислювача прогнозуючого функціонала 9. Блок порівняння відхилень проекцій струму 12 виконаний у вигляді першого й другого обчислювачів модулів 41 й 42, першого й другого релейних елементів 43 й 44, першого 45 й другого 46 компараторів, першого 47 й другого 48 логічних елементів «АБО», формувача імпульсів 49, при цьому в першого 41 й другого 42 обчислювачів модуля входи є входами блоку 12, а виходи обчислювачів модуля 41 й 42 зв'язані через релейні елементи 43 й 44 з входами першого логічного елемента «АБО» 47 і зв'язані через компаратори 45 й 46 із входами другого логічного елемента «АБО» 48, причому, вихід першого логічного елемента «АБО» 47 є першим виходом блоку порівняння відхилень проекцій струму 12, а вихід другого логічного елемента «АБО» 48 підключений до входу формувача імпульсів 49, вихід якого є другим виходом блоку порівняння відхилень проекцій струму 12. Датчик фазних ЕРС 14 виконаний у вигляді блоків датчиків напруги 50 й струму 51, обчислювача фазних ЕРС ротора 52, причому, входи блоків датчиків напруги 50 й струму 51 підключені до сторони змінного струму перетворювача 1, а виходи цих блоків приєднані до входів обчислювача фазних ЕРС ротора 52, у якого вихід є виходом датчика фазних ЕРС 14. У функціональній схемі пристрою на Фіг.3 (що реалізує запропонований спосіб векторного регулювання струму стосовно до активного фільтра) сторона змінного струму (позначена клемами «а», «b» й «с») чотириквадрантного перетворювача 1 підключена безпосередньо або через реактори 53 до джерела трифазної напруги мережі 54 (який показаний на Фіг.3, що виконано, як можливий варіант, у вигляді трифазного силового трансформатора Т, у якого виходи вторинних обмоток є виходами зазначеного джерела 54). При цьому сторона 44892 14 постійного струму (показана клемами «+» й «-» на Фіг.3) підключена до з'єднаних між собою паралельно конденсатора 55 і навантаження постійного струму 56, перший обчислювач прогнозуючого функціонала 9 додатково має третій вхід, а всі інші елементи та їхні зв'язки в пристрої на Фіг.3 повністю ідентичні показаними раніше в схемі на Фіг.1. Причому, у схемі пристрою на Фіг.3 перший обчислювач прогнозуючого функціонала 9 виконаний у вигляді квадратора 57, першого й другого ділильних блоків 58 й 59, другого обчислювального пристрою 60, вихід якого є виходом обчислювача прогнозуючого функціонала 9, перший вхід ділильного блоку 59 є першим входом обчислювача прогнозуючого функціонала 9, вхід квадратора 57 є другим входом обчислювача прогнозуючого функціонала 9 та з'єднаний з першим входом першого ділильного блоку 58, у якого другий вхід підключений до виходу квадратора 57, а вихід - до першого входу обчислювального пристрою 60, з'єднаного своїм другим входом з виходом другого ділильного блоку 59, у якого другий вхід є третім входом обчислювача прогнозуючого функціонала 9. Блок порівняння відхилень проекцій струму 12 виконаний у вигляді другого квадратора 61, компаратора 62, релейного елемента 63 і формувача імпульсів 64, при цьому вхід квадратора 61 є входом блоку порівняння відхилень проекцій струму 12, а вихід квадратора 61 з'єднаний із входами компаратора 62, релейного елемента 63 й є додатковим третім виходом блоку порівняння 12, з'єднаним із третім входом першого прогнозуючого функціонала 9, причому, виходи релейного елемента 63 і формувача імпульсів 64 є відповідно першим і другим виходами блоку порівняння 12, а вхід формувача імпульсів 64 приєднаний до виходу компаратора 62. Наведена на Фіг.4 діаграма ілюструє припустиму область (у вигляді квадрата ABCD) відхилень ∆Ix , ∆Iy проекцій статорного струму в сталому режимі для пристрою, показаного на Фіг.2, де значення: + h й - h - являють собою границі зазначеної припустимої області. Показана на Фіг.5 векторна діаграма, що ілюструє для динамічних режимів відпрацьовування в пристрої на Фіг.2 узагальненого вектора струму (або вектора статорного струму двигуна) на стороні змінного струму чотири квадрантного перетворювача 1, містить наступні позначення: І*y - задане значення активної проекції (на вісь ординат «у» ортогональної координатної системи «х-у») згаданого вектора статорного струму двигуна; ∆Ix і ∆Iy - відхилення проекцій даного узагальненого вектора статорного струму на осі ортогональної координатної системи «х-у» (зв'язаною дійсною віссю «х» з узагальненим вектором потокозчеплення ротора двигуна 35). Представлена на Фіг.6 діаграма ілюструє припустиму область (у вигляді кола із центром 0 й радіусом, рівним h) відхилень ∆Ix , ∆Iy проекцій статорного струму в сталому режимі для пристрою, показаного на Фіг.3. Причому, показані пунктиром на Фіг.4 й Фіг.6 відрізки MN являють собою 15 44892 16 проекції Ех й Еy узагальненого вектора ЕРС E = Ex + jEy на осі абсцис «х» й ординат «у» орто можливі годографи зміни згаданих відхилень ∆Ix , ∆Iy у сталому режимі роботи чотири квадрантного гональної координатної системи «х-у», де Еα, Еβ проекції узагальненого вектора ЕРС ротора E на осі нерухомої ортогональної координатної системи «α-β»; j - мнима одиниця. За допомогою датчика напруги 13 контролюють напруги Ud на стороні постійного струму перетворювача 1, що надходить на другий вхід обчислювача проекцій вихідної напруги 30. За допомогою даного обчислювача 30 для кожної з можливих комбінацій у табл. 1 відкритих і закритих силових ключів 16-21 перетворювача 1 визначають прогнозовані значення проекцій Ux(m), Uy(m) узагальненого вектора напруги U(m) = Ux (m) + jUy (m) , створюваного на стороні перетворювача. Запропонований спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача 1 функціонує (розглянемо на прикладі пристрою, показаного на Фіг.1) у такий спосіб. Заздалегідь домовимося надалі під сталим режимом роботи розглянутого перетворювача розуміти його роботу при малих значеннях відхилень ∆Ix , ∆Iy проекцій струму на стороні змінного струму перетворювача (які не перевищують допустимої для них області), а під динамічним режимом - роботу зазначеного перетворювача при відхиленнях ∆Ix , ∆Iy проекцій струму, що перевищують припустиму область відхилень. змінного струму перетворювача 1 при даних можливих комбінаціях його відкритих і закритих силових ключів. Зазначені проекції Ux(m) й Uy(m) узагальненого вектора U (m) на осі згаданої ортогональної координатної системи «х-у» розраховуються в обчислювачі 30, виходячи з прогнозованих значень (згідно з табл. 1) проекцій узагальненого вектора вихідної напруги Uα(m), Uβ(m) перетворювача 1 на осі нерухомої ортогональної координатної системи «α-β», з використанням наступних співвідношень [3]: За допомогою датчика фазних ЕРС 14 контролюють фазні електрорушійні сили ЕA, ЕB, ЕC на стороні змінного струму перетворювача 1, що надходять на один із входів обчислювача проекцій вектора ЕРС 29. На інший вхід цього обчислювача й на один із входів обчислювача проекцій вихідної напруги 30 надходять вихідні сигнали від задатчика гармонійних функцій 28, що формує гармонійні функції cosΘк, sinΘк від аргументу Θк ортогональної координатної системи «х-у», де Θк - кут зсуву осі абсцис «х» зазначеної ортогональної координатної системи щодо нерухомої осі «а» відліку (співпадаючої, наприклад, з геометричною віссю статорної обмотки фази «А» асинхронного двигуна - у частотно-регульованому асинхронному електроприводі або геометричній осі фази «А» вторинної обмотки силового трансформатора - для активного фільтра [3]). Ux (m) = Uα (m) cos Θк + Uβ (m) sin Θк ,⎫ ⎪ Uy (m) = Uβ (m) cos Θк − Uα (m) sin Θк ,⎬ , (9) ⎪ m = 1, 2,... 8. ⎭ Обчислювач проекцій вектора ЕРС 29 визначає на своїх виходах зі співвідношень [3]: Eα = E A ; Eβ = (EB − EC ) / 3 ;⎫ ⎪ ⎪ E x = Eα cos Θк + Eβ sin Θк , ⎬, (8) E y = Eβ cos Θк − Eα sin Θк ⎪ ⎪ ⎭ Таблиця 1 Умовні номери комбінацій відкритих (показані знаком «+») і закритих силових ключів чотириквадрантного перетворювача Номер комбінації m 1 2 Наявність імпульсів керування, що відкривають силові ключі 16 17 18 19 20 21 + + + + + + 3 + + 4 5 + + + 6 7 8 + + + + + + + + Uα(m) Uβ(m) +Ud +Ud/2 + 3 +Ud/2 -Ud/2 0 + 3 +Ud/2 0 + + -Ud -Ud/2 − 3 +Ud/2 + + +Ud/2 0 0 − 3 +Ud/2 0 0 + За допомогою обчислювача проекцій результуючої напруги 31 розраховують у вигляді різниці згаданих прогнозованих проекцій Ux(m), Uy(m) узагальненого вектора напруги U (m) й проекцій Еx, Еу узагальненого вектора ЕРС Е прогнозовані значення проекцій ∆Ux(m), ∆Uy(m) результуючого вектора напруги ∆ U (m) при всіх можливих комбінаціях відкритих і закритих силових ключів перетворювача 1: ∆Ux (m) = Ux (m) − E x ,⎪ ⎫ ⎬, (10 ) ∆Uy (m) = Uy (m) − E y .⎪ ⎭ За допомогою блоку датчиків відхилень проекцій струму 15 контролюють відхилення ∆Іх, ∆Іу між заданими I*x, I*y й фактичними Іх, Іу значеннями проекцій (на осі зазначеної ортогональної координатної системи «х-у») узагальненого вектора струму I , створюваного на стороні змінного струму перетворювача 1: ∆Ix = I* − Ix ,⎫ ⎪ x ⎬, (11) ∆Iy = I* − Iy .⎪ y ⎭ За допомогою першого обчислювача прогнозуючого функціонала 9 через обчислені проекції ∆Ux(m), ∆Uy(m) прогнозуючого вектора результуючої напруги й через контрольовані відхилення ∆Іх, ∆Іy проекцій струму розраховують для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача значення F1 (m) першого прогнозуючого функціонала. За допомогою першого обчислювача екстремального значення 7 з розрахованих значень F1 (m) першого прогнозуючого функціонала знаходять екстремальне значення F10 даного функціонала, яке відповідає швидкодіючому регулюванню струму на стороні змінного струму перетворювача 1 у динамічних режимах його роботи. У блоці порівняння відхилень проекцій блоку 12 задають припустиму (яка характеризується границею h) область відхилень проекцій узагальненого вектора струму на стороні змінного струму перетворювача 1, що відповідає сталим режимам роботи цього перетворювача, з якої порівнюють контрольовані відхилення ∆Іх, ∆Іy проекцій узагальненого вектора струму І. Причому, якщо контрольовані відхилення ∆Іх, ∆Іy проекцій узагальненого вектора струму виходять за межі припустимої області, то на першому виході блоку порівняння 12 формують сигнал лог. «0», що надходить на керуючий вхід мультиплексора 6 і задає стан останнього таким, котре показано на Фіг.1. При даному стані мультиплексора 6 задають із виходу першого обчислювача екстремального значення 7 (через мультиплексор 6, перетворювач коду 5 і блок формувачів імпульсів 4) нове значення m* = m1 комбінації відкритих і закритих силових ключів 16-21 перетворювача 1 таке, яке відповідає знайденому екстремальному значенню F10 першого прогнозуючого функціонала й забезпечує, очевидно, швидкодіюче регулювання струму на стороні змінного струму перетворювача 1 у динамічних режимах його роботи. Якщо по закінченні динамічного режиму регулювання струму на стороні змінного струму перетворювача 1 хоча б одне з контрольованих відхи лень ∆Іх, ∆Іy проекцій струму досягає границі припустимої області відхилень, то на другому виході блоку порівняння 12 формується вузький (тривалістю кілька мікросекунд) сигнал лог. «1». По цьому сигналу, що надходить на керуючі входи першого 32 й другого 33 регістрів, дозволяється зміна вихідних сигналів цих регістрів на значення, що є присутні у цей момент часу на входах цих регістрів. У результаті цього на виході першого регістра 32 установлюються значення ∆Ux0 (m), ∆Uy0 (m), що відповідають значенням проекцій ∆Ux(m), ∆Uy(m) прогнозованих результуючих векторів напруги на границі припустимої області відхилень, а на виході другого регістра 33 - установлюються значення ∆Іх0, ∆Іy0 відхилень ∆Іх, ∆Іy проекцій струму, які також відповідають (належать) границям припустимої області відхилень. По закінченні вузького одиничного імпульсу на другому виході блоку порівняння 12 забороняється зміна вихідних сигналів регістрів 32 й 33, внаслідок чого на їхніх виходах зберігаються сигнали, рівні відповідно ∆Ux0 (m), ∆Uy0 (m) і ∆Іх0, ∆Іy0. Через дані сигнали, що надходять на перший й другий входи другого обчислювача прогнозуючого функціонала 10, у цьому обчислювачі розраховують для всіх можливих комбінацій (m = 1, 2,... 8) відкритих і закритих силових ключів перетворювача 1 значення F2 (m) другого прогнозуючого функціонала, з яких за допомогою другого обчислювача екстремального значення 8 знаходять екстремальне значення F02 даного функціонала, що відповідає мінімально можливій частоті перемикань силових ключів перетворювача 1 для сталих режимів його роботи й досягає при комбінації m2 відкритих і закритих силових ключів перетворювача 1. Після входження відхилень ∆Іх, ∆Іy проекцій струму усередину припустимої області відхилень (яка відповідає сталому режиму роботи перетворювача 1) у блоці порівняння 12 на першому виході формують сигнал лог. «1», що надходить на керуючий вхід регістра 6, а на другому виході сигнал лог. «0», що надходить на керуючі входи першого 32 й другого 33 регістрів. Зазначені вихідні сигнали блоку порівняння відхилень проекцій струму 12 відповідно: по-перше, змінюють на протилежне (показаному на Фіг.1) стан мультиплексора 6 й, по-друге, забороняють зміну вихідних сигналів регістрів 32 й 33. У результаті цього задають (через перетворювач коду 5 і блок формувачів імпульсів 4) комбінацію m* відкритих і закритих силових ключів 16-21 перетворювача 1 рівної згаданому значенню m2, яка відповідає екстремальному значенню F02 другого прогнозуючого функціонала й забезпечує мінімально можливу частоту перемикання силових ключів цього перетворювача в сталих режимах його роботи. Причому, беручи до уваги відзначену заборону на зміну вихідних сигналів регістрів 32 й 33, коли контрольовані відхилення ∆Іх, ∆Іy перебувають усередині припустимої для них області відхилень, примусово підтримують незмінною зазначену комбінацію m* = m2 = const відкритих і закритих силових ключів перетворювача 1. Пристрій на Фіг.2, у якому реалізується запропонований спосіб векторного регулювання струму в частотно-регульованому асинхронному електро 19 приводі, функціонує в такий спосіб. Від джерела постійної напруги 34 подають живлення до сторони постійного струму (показаної клемами «+» й «») чотириквадрантного перетворювача 1, у якого сторону змінного струму (позначену клемами «а», «b» й «с») навантажують на асинхронний короткозамкнений двигун 35. Зазначене взаємне з'єднання джерела постійної напруги 34, трифазного чо1 й тириквадрантного перетворювача асинхронного двигуна 35 відповідає, як відомо, частотно-регульованим асинхронним електроприводам, створюваним на основі автономного інвертора напруги (виконаного на Фіг.2 у вигляді перетворювача 1) із широтно-імпульсною модуляцією [3]. У пристрої на Фіг.2 за допомогою блоку датчиків напруги 50 і блоку датчиків струму 51 контролюють відповідно фазні напруги UA, UB й фазні струми ІA, ІB на короні змінного струму чотириквадрантного перетворювача 1 (виконуючого, як було зазначено вище, роль трифазного автономного інвертора напруги). Через згадані фазні напруги UA, UB й струми ІA, ІB, які надходять на входи обчислювача фазних ЕРС ротора 52, в останньому розраховують зведені до статора фазні ЕРС ротора ЕA, ЕB, ЕC асинхронного двигуна 35 зі співвідношень [3]: dI ⎤ ⎫ ⎡ E A = UA − ⎢RsIA + L σ A ⎥,⎪ dt ⎦ ⎪ ⎣ dIB ⎤ ⎪ ⎡ EB = UB − ⎢RsIB + L σ , ⎬ (12) dt ⎥ ⎪ ⎣ ⎦ EC = −(E A + EB ). ⎪ ⎪ ⎭ У даних співвідношеннях фазні ЕРС ротора ЕA, ЕB двигуна 35 обчислюють у вигляді різниці між відповідною фазною напругою UA (або UB), контрольованою на стороні змінного струму перетворювача 1, і сумою двох доданків, перший з яких розраховують у вигляді добутку активного опору Rs статора двигуна на значення струму ІA (або IB), контрольованого на стороні змінного струму в даній фазі перетворювача 1, а другий доданок визначають у вигляді добутку похідної за часом від цього струму на значення сумарної індуктивності розсіювання Lσ статора і ротора двигуна. Беручи до уваги, що в асинхронному короткозамкненому двигуні сума фазних ЕРС ротора в будь-який момент часу дорівнює нулю: (ЕA + EB + ЕC = 0), третю фазну ЕРС ротора ЕC двигуна знаходять із більше простого третього співвідношення в (12) - у вигляді суми двох інших фазних ЕРС ротора (ЕA і EB), узятих зі зворотним знаком. Через те, що в схемі на Фіг.2 від задатчика гармонійних функцій 28 (який входить до складу блоку обчислювачів проекцій векторів 11) задають гармонійні функції cosΘк, sinΘк (від аргументу Θк осі абсцис «х» координатної системи «х-у») рівними відповідно гармонійним функціям cosΘψ, sinΘψ від аргументу Θψ узагальненого вектора потокозчеплення ротора Ψr асинхронного двигуна 35, зазначену ортогональну координатну систему «ху» орієнтують віссю абсцис «х» по узагальненому 44892 20 вектору потокозчеплення ротора Ψr двигуна 35. При цьому припустиму область відхилень ∆Іх, ∆Іy проекцій узагальненого вектора струму І, створюваного на стороні змінного струму перетворювача 1, задають у сталих режимах співвідношенням (1). Зазначеному співвідношенню відповідає на діаграмі Фіг.4 припустима область ABCD, що має вид квадрата й характеризується границями, рівними: +h й -h. З виходу блоку датчиків відхилень проекцій струму 15 на входи релейних елементів 36 й 37 (які входять до складу першого обчислювача прогнозуючого функціонала 9) надходять відхилення ∆Іх, ∆Іy проекцій узагальненого вектора статорного струму I , створюваного на стороні змінного струму перетворювача 1. За допомогою релейних елементів 36 й 37 формують гістерезисного типу релейні функції fx й fy (форма яких показана усередині цих елементів на Фіг.2), знаки яких змінюються при виході відхилень ∆Іх, ∆Іy проекцій струму за межі припустимої області (заданої квадратом ABCD на Фіг.4) згідно з полярністю відповідного відхилення ∆Іх або ∆Іy проекції узагальненого вектора струму І. За допомогою зазначених релейних елементів 36, 37, множних блоків 38 й 39 та першого обчислювального пристрою 40 розраховують із співвідношень (2) перший прогнозуючий функціонал F1 (m) та задають його розраховане значення з виходу обчислювача 9 (який є виходом обчислювального пристрою 40) на вхід першого обчислювача екстремального значення 7. Причому в співвідношеннях (2) наявність позитивної полярності співмножника: [fx.∆Ux(m)] - відповідає однаковим між собою знакам функцій fx та проекції ∆Ux(m), що забезпечує гарантоване відпрацьовування відхилення ∆Іх проекції струму, що намагнічує [34]. А наявність позитивної полярності співмножника: [fx.∆Ux(m)] - відповідає однаковим між собою знакам функції fy та проекції ∆Uy(m), що забезпечує, в свою чергу, гарантоване відпрацьовування відхилення ∆Іy активної проекції струму згідно [3]. За допомогою першого обчислювача екстремального значення 7 визначають екстремальне значення F01 першого прогнозуючого функціонала F1 (m) у вигляді його максимуму відповідно до співвідношення (3), а також відповідне йому оптимальне значення m1 комбінацій відкритих і закритих силових ключів перетворювача 1 для динамічних режимів його роботи. Дане значення m1 комбінації силових ключів перетворювача 1 досягається, згідно (2), при одночасному виконанні двох умов: по-перше, - при максимальному (і позитивному) значенні добутку: [fx.∆Uy(m)]. І, по-друге, при позитивному значенні добутку [fx.∆Ux(m)], оскільки тільки при такому значенні даного добутку коефіцієнт К1 у прогнозуючому функціоналі F1 (m) не дорівнює нулю (і позитивний). Причому, символ «sign» в співвідношенні (2) й при наступному його використанні позначає математичну функцію визначення алгебраїчного знаку числа (й дорівнює для додаткового й від'ємного числа відповідно +1 або -1). При відхиленнях ∆Іх, ∆Іy проекцій статорного струму, що виходять за межі їхньої припустимої 21 області (заданої квадратом ABCD на Фіг.4), вихідні сигнали ∆Ix , ∆Iy першого 41 та другого 42 обчи слювачів модуля перевищують уставку h, внаслідок чого на виходах релейних елементів 43, 44 та компараторів 45, 46 присутні сигнали лог. «1». При цьому вихідні сигнали логічних елементів «АБО» 47 та 48 дорівнюють лог. «1», при яких на першому (вихід логічного елемента 47) та другому (вихід формувача імпульсів 49) виходах блока 12 присутні сигнали, які дорівнюють відповідно лог. «1» та лог. «0». Це забезпечує в пристрої на Фіг.2 (аналогічно розглянутому при описі функціонування пристрою на Фіг.1) стан мультиплексора 6 відповідає показаному на цьому малюнку. При даному стані мультиплексора 6 від першого обчислювача екстремального значення 7 задають (через мультиплексор 6, перетворювач коду 5 і блок формувачів імпульсів 4) нову комбінацію m* = m1 відкритих і закритих силових ключів 16-21 перетворювача 1 відповідному екстремальному значенню F01 першого прогнозуючого функціонала F1 (m). У свою чергу, завдання такої комбінації m1 силових ключів перетворювача 1 забезпечує в динамічних режимах граничне (оптимальне) за швидкодією регулювання відхилення ∆Іy активної проекції статорного струму й стійкий процес регулювання відхилення ∆Іx проекції, що намагнічує, статорного струму в заданому «коридорі» для двигуна 35 відповідно до діаграми на Фіг.5 [1]. На цьому рисунку показаний (годографом Q1Q2Q3Q4M) процес регулювання відхилень ∆Іx, ∆Іy проекцій статорного струму двигуна 35, що відповідає динамічному режиму відпрацьовування в пристрої на Фіг.2 східчасте задані значення І*y активної проекції статорного струму двигуна при законі частотного керування двигуном зі сталістю складової, що намагнічує, статорного струму (або, те ж саме, - зі сталістю модуля потокозчеплення ротора двигуна ) [3]. По закінченні відзначеного вище процесу відпрацьовування активної проекції І*y статорного струму двигуна значення ∆Іx, ∆Іy відхилень намагнічуючої й активної проекцій досягають границь припустимої області (нехай, наприклад, це відбулося в крапці М на діаграмі припустимої області ABCD на Фіг.4). При цьому в блоці порівняння 12 в цей момент часу на виході компараторів 45 та 46 встановлюються сигнали, рівні лог. «0», внаслідок чого на виході логічного елемента «АБО» 48 виконується зміна сигналу з лог. «1» в лог. «0». При зазначеній зміні фронту вихідного сигналу логічного елементу 48, який надходить на вхід формувача імпульсів 49, на виході останнього формується вузький (довжиною декілька мікросекунд) імпульс, рівний лог. «1». Коли контрольовані відхилення ∆Іx, ∆Іy перебувають в області припустимих відхилень, заданої співвідношенням (1), вихідні сигнали релейних елементів 43, 44 і логічного елемента «АБО» 47 стають рівними лог. «0». При даних вихідних сигналах блоку порівняння 12 (на першому його виході сигнал дорівнює лог. «0», а на другому - короткочасно лог. «1»). Як було докладно розглянуто при описі пристрою на Фіг.1, при цьому за допомогою блоку обчислювачів проекцій векторів 44892 22 11 визначають відповідні цьому моменту часу: прогнозовані значення ∆Ux0 (m), ∆Uy0 (m) проекцій результуючого вектора напруги й значення відхилень ∆Іx0, ∆Іy0 проекцій статорного струму, - які надходять на входи другого обчислювача прогнозуючого функціонала 10. За допомогою даного обчислювача 10 задають другий функціонал F2 (m) залежностями з (4). Пояснимо фізичний зміст функціонала F2 (m) на прикладі траєкторії MN зміни відхилень ∆Іx, ∆Іy проекцій статорного струму в сталому режимі усередині припустимої області ABCD на Фіг.4, що відповідає m-ої комбінації силових ключів перетворювача 1. Згідно [3] для довільної m-ої комбінації відкритих і закритих силових ключів перетворювача 1 траєкторії MN являє собою відрізок прямої, а похідні в часі від проекцій статорного струму приблизно рівні [3]: dIx ∆Ux (m) ⎫ ,⎪ ≈ dt Lσ ⎪ , (13 ) dIy ∆Uy (m) ⎬ .⎪ ≈ ⎪ dt Lσ ⎭ Виходячи із цього, поточні значення відхилень ∆Іx, ∆Іy проекцій струму на стороні змінного струму чотириквадрантного перетворювача, що відповідають m-ої комбінації його силових ключів й характерним рухом по згаданому відрізку прямої MN (або його продовженню) на Фіг.4, описуються наступними співвідношеннями: ∆ Ux 0 ( m ) ⎫ ∆Ix = ∆Ix 0 − t,⎪ Lσ ⎪ , (14 ) ∆ Uy 0 ( m ) ⎬ ∆Iy = ∆Iy 0 − t.⎪ ⎪ Lσ ⎭ де t - час, що відраховується від моменту часу, що відповідає знаходженню відхилень ∆Іx, ∆Іy проекцій статорного струму в початковій точці М на границі припустимої області. За допомогою останніх співвідношень запишемо умови перетинання годографом відхилень ∆Іx, ∆Іy проекцій статорного струму вертикальних і горизонтальних прямих, що характеризуються значеннями, рівними: ±h по осях абсцис й ординат відповідно (тобто - такими ж значеннями, як у границь припустимої області відхилень ABCD на Фіг.4): ∆Ux 0 (m) ⎫ ± h = ∆Ix 0 − t x (m),⎪ Lσ ⎪ ⎬, (15 ) ∆Uy 0 (m) ± h = ∆Iy 0 − t y (m ) ⎪ ⎪ Lσ ⎭ де tx(m) й ty(m) - часи досягнення зазначеними відхиленнями ∆Іx, ∆Іy проекцій статорного струму згаданих значень абсцис й ординат, рівних: ± h. Беручи до уваги, що при позитивних значеннях проекцій ∆Ux0 (m), ∆Uy0 (m) результуючого вектора напруги відбувається зменшення значень відхилень ∆Іx, ∆Іy проекцій статорного струму (що приводить до наступного досягнення ними негативних значень по осі абсцис й ординат, рівних: - h), а при від'ємних значеннях проекцій ∆Ux0 (m), ∆Uy0 (m) зазначеного вектора - навпаки, відбувається збільшення відхилень ∆Іx, ∆Іy проекцій статорного 23 44892 струму (що приводить до досягнення ними позитивних значень по осі абсцис й ординат, рівних: + h), перетворимо умови (15) до наступного виду: ∆Ux 0 (m) ⎫ − h sign[∆Ux 0 (m)] = ∆Ix 0 − t x (m),⎪ Lσ ⎪ ⎬, (16 ) ∆Uy 0 (m) − h sign ∆Uy 0 (m) = ∆Iy0 − t y (m).⎪ ⎪ Lσ ⎭ Зі співвідношень (16) визначимо часи tx(m) й ty(m) досягнення відхиленнями ∆Іx, ∆Іy проекцій статорного струму згаданих значень абсцис й ординат, рівних: ± h, які перебувають у вигляді: Lσ {∆Ix0 + h[sign(∆Ux0 (m))]},⎫ t x (m ) = ⎪ ∆Ux0 (m) ⎪ ⎬, (17 ) Lσ t y (m ) = ∆Iy 0 + h sign ∆Uy 0 (m) . ⎪ ∆Uy0 (m) ⎪ ⎭ [ ] { [ ( )]} 3 (17) визначимо для m-ої комбінації силових ключів перетворювача 1 час t(m) присутності відхилень проекцій струму ∆Іx, ∆Іy в межах припустимої області ABCD на Фіг.4, що, очевидно, дорівнює мінімальному значенню з розрахованих часів tx (m) й ty (m): t(m)=min{tx(m), ty(m)}, (18) Беручи до уваги співвідношення (18), значення з (4) другого прогнозуючого функціонала F2(m) є прямо пропорційним прогнозованому часу t(m) присутності відхилень ∆Іx, ∆Іy проекцій статорного струму усередині припустимої області відхилень у сталому режимі роботи для m-ої комбінації силових ключів перетворювача 1. За допомогою другого обчислювача екстремального значення 8 знаходять екстремальне значення F02 другого прогнозуючого функціонала F2 (m) у вигляді його максимуму зі співвідношення (5) і відповідне йому оптимальне значення m2 комбінації силових ключів перетворювача 1. З урахуванням вищевикладеного, екстремальне значення F02 другого прогнозуючого функціонала F2 (m) прямо пропорційно найбільшому можливому значенню тривалості часу t(m1) знаходження відхилень ∆Іx, ∆Іy проекцій статорного струму усередині припустимої області відхилень у сталому режимі роботи, а, отже, - відповідає мінімально можливій частоті перемикання силових ключів перетворювача 1 у сталому режимі роботи (яка досягається при завданні m1-ой комбінації його силових ключів). У блоці порівняння відхилення проекцій струму 12 з виходів обчислювачів модуля 41 й 42 на входи релейних елементів 43, 44 і компараторів 45, 46 надходять сигнали абсолютних значень ∆Ix i ∆Iy відхилень проекцій статорного струму двигуна. На виході зазначених релейних елементів 43 й 44 формуються гістерезисного типу релейні функції (з формою, показаною усередині цих елементів Фіг.2), що характеризуються можливими значеннями, рівними лог. «0» або лог. «1» й свої значення, що змінюються, при вхідних сигналах, рівних: h або (h+∆h), де ∆h=(0,1-1)h. При цьому на виході логічного елемента «АБО» 47 формується сигнал лог. «0», якщо вихідні сигнали релейних елементів 43 й 44 одночасно рівні лог. «0» (відповідає сталому режиму роботи), або - сигнал лог. «1», якщо хоча б один з вихідних сигналів релей 24 них елементів 43 й 44 дорівнює лог. «1» (відповідає динамічному режиму роботи). Розглянемо роботу пристрою на Фіг.2 у сталому режимі роботи, коли відхилення ∆Іx, ∆Іy проекцій струму перебували в попередній інтервал часу усередині припустимої області (ABCD на Фіг.4) і в наступний момент часу досягли границі (точка N на Фіг.4) цієї області. При цьому на границі припустимої області вихідний сигнал хоча б в одного з компараторів 45 або 46 змінюється з лог. «0» на лог. «1», внаслідок цього, аналогічно змінюється з лог. «0» на лог. «1» вихідний сигнал логічного елемента «АБО» 48, що надходить на вхід формувача імпульсів 49. Останній при зміні фронту (з лог. «0» у лог. «1») вхідного сигналу формує на своєму вході вузький (тривалістю кілька мікросекунд) сигнал лог. «1». При впливі цього сигналу на керуючі входи регістрів 32 й 33 (що містяться в складі блоку 11, показаного на Фіг.1) на виходах цих регістрів установлюються значення ∆U’x0 (m), ∆U’y0 (m), що відповідають значенням проекцій ∆Ux0 (m), ∆Uy0 (m) прогнозованих результуючих векторів напруги ∆ U(m) в точці N на границі припустимої області відхилень на Фіг.4, а також значення ∆І’x0, ∆І’y0 відхилень ∆Іx, ∆Іy проекцій струму, які теж відповідають (належать) границям припустимої області відхилень у крапці N на Фіг.4. По закінченні вузького одиничного імпульсу на виході формувача імпульсів 49 (що є другим виходом блоку порівняння 12) забороняється зміна вихідних сигналів ∆U’x0 (m), ∆U’y0 (m) і ∆І’x0, ∆І’y0 згаданих регістрів 32 й 33. Через дані сигнали, що надходять на перший і другий входи другого обчислювача прогнозуючого функціонала 10, розраховують у цьому обчислювачі для всіх можливих комбінацій (m = 1,2,... 8) відкритих і закритих силових ключах перетворювача 1 значення F2 (m) другого прогнозуючого функціонала, з яких за допомогою другого обчислювача екстремального значення 8 знаходять екстремальне значення F02 даного функціонала й відповідне йому нове значення m’2 оптимальної комбінації силових ключів перетворювача 1. Якщо за час обчислення зазначеної нової комбінації m’2 силових ключів перетворювача 1 абсолютні ∆Ix , ∆Iy відхилень проекцій струму не перевищили уставки (h+∆h), то на виходах релейних елементів 43, 44 і логічного елемента «АБО» 47 присутні сигнали, рівні лог. «0», які забезпечують стан мультиплексора 6, який протилежний показаному на Фіг.2. При цьому зазначена обчислена комбінація m’2 задає (від другого обчислювача екстремального значення 8 через мультиплексор 6, перетворювач коду 5 і блок формувачів імпульсів 4) відповідну їй (з табл. 1) комбінацію відкритих і закритих силових ключів 16-21 перетворювача 1. Дана комбінація m’2 силових ключів 16-21 перетворювача 1 забезпечує повернення (по траєкторії NS на Фіг.4) відхилень ∆Іx, ∆Іy проекцій струму в межі припустимої для них області й задає мінімально можливе значення частоти перемикання силових ключів перетворювача 1 у сталих режимах. Далі для пристрою на Фіг.2 робота повторюється й відповідає розглянутому сталому 25 режиму. Розглянемо роботу пристрою на Фіг.2, коли при виході відхилень ∆Іx, ∆Іy проекцій струму із припустимої області хоча б одне з їхніх абсолютних значень ∆Ix , ∆Iy перевищує уставку, рівну (h + ∆h). У цьому випадку на виході хоча б одного з релейних елементів 43 або 44 відповідно встановлюється сигнал лог. «1», внаслідок чого змінюється на лог. «1» вихідний сигнал логічного елемента «АБО» 47, що приводить до зміни стану (на відповідно показаному на Фіг.2) мультиплексора 6. При цьому з виходу першого обчислювача екстремального значення 7 задають (через мультиплексор 6, перетворювач коду 5 і блок формувачів імпульсів 4) комбінацію m1 відкритих і закритих силових ключів 16-21 перетворювача 1 такою, яка забезпечує оптимальне за швидкодією регулювання статорного струму двигуна 35 у динамічних режимах роботи. Далі робота пристрою на Фіг.2 повторюється й відповідає раніше розглянутій роботі цього пристрою для динамічних режимів роботи. Пристрій на Фіг.3 (у якому реалізується запропонований спосіб векторного регулювання струму в активному фільтрі) функціонує в такий спосіб. Від джерела трифазної напруги мережі 54 подають живлення безпосередньо або через реактори 53 до сторони змінного струму (позначеної клемами «а», «b» й «с») трифазного чотириквадрантного перетворювача 1. За допомогою датчика фазних ЕРС 14 контролюють у якості цих ЕРС фазні напруги ЕA, EB, ЕC зазначеного джерела трифазної напруги мережі 54 (зокрема, фазні напруги на вторинних обмотках трансформатора Т цього джерела). За допомогою квадратора 61 (що міститься в блоці порівняння відхилень проекцій струму 12) обчислюють у вигляді кореня квадратного із суми квадратів згаданих відхилень ∆Іx, ∆Іy проекцій струму модуль ∆І узагальненого вектора відхилення струму ∆ I : ∆I = ∆I2 + ∆I2 . (19) x y Отримане значення модуля ∆І порівнюють із установленою величиною h, що задає на Фіг.6 припустиму область (у вигляді кола із центром у точці 0) відхилень проекцій струму в сталому режимі роботи. Причому, це порівняння відбувається на входах компаратора 62 і релейного елемента 63, що входять до складу блоку порівняння відхилень проекцій струму 12 у пристрої на Фіг.3. При цьому релейний елемент 63 характеризується релейною передаточною функцією гістерезисного типу й формує на своєму виході сигнал, рівний лог. «0», при ∆І h або при ∆I>h + ∆h (відповідно до наведеного позначення елемента 63 на Фіг.3) На виході компаратора 62 на границі припустимої області відхилень (при ∆І = h на Фіг.6) відбувається зміна вихідного сигналу даного компаратора: з лог. «0» у лог. «1» або з лог. «1» у лог. «0» (залежно від того, контрольовані відхилення ∆Іx, ∆Іy проекцій струму виходять за межі або входять усередину припустимої для них області відхилень відповідно). При зазначеній зміні фронтів вихідного сигналу компа 44892 26 ратора 62 за допомогою формувача імпульсів 64 на виході останнього формується вузький (тривалістю кілька мікросекунд) імпульс, рівний лог. «1», що дозволяє зміну вихідних сигналів регістрів 32 й 33, що містяться в блоці обчислювачів проекцій векторів 11 (показаному на Фіг.1). За допомогою задатчика гармонійних функцій 28 (що входить згідно Фіг.1 до складу блоку обчислювачів проекцій векторів 11) задають ортогональну координатну систему «х-у» нерухомою з орієнтацією осі абсцис «х» по геометричній осі обмотки трансформатора Т, що створює ЕРС ЕA у фазі А на стороні змінного струму перетворювача 1. Це досягається в згаданому задатчику 28 шляхом завдання аргументу Θк осі абсцис «х» цієї координатної системи рівним нулю: Θк = 0. З урахуванням останнього, функціонування блоку обчислювачів проекцій векторів 11 у пристрої на Фіг.3 відбувається ідентично раніше розглянутому функціонуванню цього блоку в пристрої на Фіг.1 тільки лише з тією відмінністю, що обчислюють блоком 11 проекції всіх векторів: ∆Ux0 (m), ∆Uy0 (m) і ∆Іx0, ∆Іy0 - у пристрої на Фіг.3 знаходять на осі згаданої нерухомої ортогональної координатної системи (для якої, очевидно, властиві незмінні значення гармонійних функцій: cosΘк = 1 і sinΘк = 1). За допомогою ділильного блоку 59 (що міститься в першому обчислювачі прогнозуючого функціонала 9) у вигляді відносин відхилень ∆Іx, ∆Іy проекцій струму на осі абсцис й ординат ортогональної координатної системи до модуля ∆І узагальненого вектора відхилення ∆ I визначають значення відповідно косинуса й синуса від аргументу Θ∆І цього вектора: cos Θ ∆I = ∆Ix / I,⎪ ⎫ ⎬. ( 20 ) sin Θ ∆I = ∆Iy / I ⎪ ⎭ За допомогою квадратора 57 для всіх можливих комбінацій (m = 1, 2,... 6) відкритих і закритих силових ключів перетворювача 1 (з табл. 1) розраховують у вигляді кореня квадратного із суми квадратів його проекцій значення модуля ∆U(m) результуючого вектора напруги ∆ U (m): ∆U(m) = ∆U2 (m) + ∆U2 (m). (21) x y За допомогою ділильного блоку 58 у вигляді відношень проекцій результуючого вектора напруги на осі абсцис «х» й ординат «у» ортогональної координатної системи «х» до його модуля ∆U(m) для всіх можливих комбінацій відкритих і закритих силових ключів перетворювача 1 обчислюють значення відповідно косинуса й синуса від аргументу Θ∆U(m) цього вектора: cos Θ ∆U (m) = ∆Ux (m) / U(m),⎫ ⎪ ⎬. ( 22) sin Θ ∆U (m) = ∆Uy (m) / U(m) ⎪ ⎭ При цьому за допомогою обчислювального пристрою 60 розраховують перший прогнозуючий функціонал F1 (m) у вигляді суми двох доданків, перший з яких являє собою добуток косинусів від аргументів Θ∆U і Θ∆I результуючого вектора напруги ∆ U й узагальненого вектора відхилення струму 27 ∆ I , а другий доданок - добуток синусів від аргументів Θ∆U і Θ∆I цих векторів: F1 (m) = cosΘ∆U (m) ⋅ cosΘ∆I (m) + sin Θ∆U (m) ⋅ sin Θ∆I (m). (23) За допомогою другого обчислювача прогнозуючого функціонала 10 задають другий прогнозуючий функціонал F2 (m) залежностями з (6). Пояснимо фізичний зміст даного прогнозуючого функціонала F2(m), виходячи з аналізу зміни, що відбувається, відхилень ∆Іx, ∆Іy проекцій струму усередині припустимої області відхилень (у вигляді кола на Фіг.6) у сталому режимі роботи для довільної m-ої комбінації силових ключів перетворювача 1. Як відомо з [3], зміна відхилень ∆Іx, ∆Іy проекцій струму на стороні змінного струму чотириквадрантного перетворювача характеризується: по-перше, траєкторією руху MN у вигляді відрізка прямої на Фіг.6, і, по-друге, похідними за часом від проекцій Іx, Iу узагальненого вектора струму (створюваного на стороні змінного струму перетворювача 1), що розраховують зі співвідношень (13). З урахуванням цього й беручи до уваги зміну, що відбувається, з (14) відхилень ∆Іx, ∆Іy, проекцій струму в чотириквадрантному перетворювачі 1, тривалість часу t(m) знаходження зазначених відхилень ∆Іx, ∆Іy (при прямуванні від точки М до точки N) усередині припустимої для них області відхилень, заданої у вигляді кола (з радіусом h) на Фіг.6, визначається з рішення системи рівнянь: ∆Ux (m) ⎫ ∆IxN(m) = ∆Ix 0 − ⋅ t(m),⎪ Lσ ⎪ ∆Uy (m) ⎪ ∆IyN(m) = ∆Iy 0 − ⋅ t(m),⎪ Lσ ⎬, (24) ⎪ ∆I2 N (m) + ∆I2 N (m) = h2, ⎪ x y ⎪ 2 2 2 ⎪ ∆Ix 0 + ∆Iy 0 = h . ⎭ де ∆Іx0 й ∆Іy0 - контрольовані в точці М на границі припустимої області значення відхилень проекцій узагальненого вектора струму I (створюваного на стороні змінного струму перетворювача 1); ∆Іx N і ∆Іy N - значення відхилень проекцій узагальненого вектора струму I , що відповідають у точці N на Фіг.6 границі припустимої області; ∆Іx0 (m), ∆Іy0 (m) - значення проекцій прогнозованого результуючого вектора напруги ∆ U(m) відповідно на осі абсцис й ординат ортогональної координатної системи «х», обчислені на границях припустимої області (у точці М на Фіг.6) для m-ої комбінації відкритих і закритих силових ключів перетворювача 1; Lσ - сумарна індуктивність фази ланцюга змінного струму чотириквадрантного перетворювача 1 у пристрої на Фіг.3 (що являє собою для однієї з фаз на стороні змінного струму цього перетворювача суму: індуктивності короткого замикання силового трансформатора Т, індуктивності реактора 53 й індуктивності кабелів, що підводять). Рішенням системи рівнянь (21) щодо часу t (m) є вираз: 44892 28 ⎡ ∆Ix 0 ∆Ux 0 (m) + ∆Iy 0 ∆Uy 0 (m) ⎤ ⎥. (25) t(m) = 2L σ = ⎢ ⎢ ⎥ ∆U2 0 (m) + ∆U2 0 (m) x y ⎣ ⎦ З урахуванням вищевикладеного, значення другого прогнозуючого функціонала F2 (m), що розраховується з (6), прямо пропорційні часу t (m) знаходження відхилень ∆Іx, ∆Іy проекцій струму в припустимій для них області, заданої навкруги (із центром у точці 0 и радіусом, рівним h) на Фіг.6, при m-ої комбінації силових ключів перетворювача 1. Розглянемо роботу пристрою на Фіг.3 у динамічному режимі роботи (коли відхилення ∆Іx, ∆Іy проекцій струму перебувають за межами припустимої області, показаної колом на Фіг.6). У цьому випадку на виході релейного елемента 63 присутній сигнал лог. «1», якому відповідає стан мультиплексора 6, показаний в схемі на Фіг.3. При цьому за допомогою першого обчислювача екстремального значення 7 знаходять екстремальне (найбільше) значення F01 першого прогнозуючого функціонала F1 (m) й відповідне йому оптимальне значення m1 комбінації відкритих і закритих силових ключів перетворювача 1. Зазначене значення m1 комбінації задають (від обчислювача 7 через мультиплексор 6, перетворювач коду 5 і блок формувачів імпульсів 4) силовим ключам 16-21 перетворювача 1, внаслідок чого в пристрої на Фіг.3 забезпечується швидкодіюче векторне регулювання струму на стороні змінного струму зазначеного перетворювача в динамічних режимах [2]. Розглянемо роботу пристрою на Фіг.3 у сталому режимі роботи, коли по закінченні динамічного режиму відхилення ∆Іx, ∆Іy проекцій струму досягли (у точці М на Фіг.6) границі припустимої області відхилень. При цьому на виході формувача імпульсів 64 формується вузький (тривалістю кілька мікросекунд) імпульс, рівний лог. «1», що надходить на один із входів блоку обчислювачів проекцій струму 11 і забезпечує (аналогічно розглянутому при описі пристрою на Фіг.1) обчислення на виході цього блоку: прогнозованих проекцій ∆Ux 0 (m ), ∆Uy 0 (m ) результуючого вектора напруги ∆ U(m) й відхилень ∆Іx 0, ∆Іy 0 проекцій струму, відповідній границі (у точці М на Фіг.6) припустимої області відхилень у розглянутому сталому режимі. Через зазначені проекції ∆Ux 0 (m ), ∆Uy 0 (m ) й ∆Іx 0, ∆Іy 0, що надходять на входи другого обчислювача прогнозуючого функціонала 10, в останньому розраховують із залежностей (6) для всіх можливих комбінацій силових ключів перетворювача 1 значення F2 (m) другого прогнозуючого функціонала. За допомогою другого обчислювача екстремального значення 8 із зазначених значень F2 (m) другого прогнозуючого функціонала знаходять його екстремальне (найбільше) значення F02 й відповідне йому оптимальне значення m2 комбінації силових ключів перетворювача 1 (яке, у свою чергу, відповідає максимально можливому часу: 1(m)=1(m2)= max знаходження відхилень ∆Іx, ∆Іy проекцій струму в припустимій для сталих режимів області відхилень, заданої колом на Фіг.6). При 29 знаходженні відхилень ∆Іx, ∆Іy проекцій струму усередині припустимої області відхилень змінює на лог. «0» свій вихідний сигнал релейний елемент 63, внаслідок чого змінює на протилежний (показаному в схемі на Фіг.3) стан мультиплексора 6. При цьому задають (з виходу другого обчислювача екстремального значення 8 через мультиплексор 6, перетворювач коду 5 і блок формувачів імпульсів 4) зазначену комбінацію m2 для силових ключів 16-21 перетворювача 1, що забезпечує мінімально можливу частоту перемикання силових ключів даного перетворювача в сталих режимах роботи (а, отже, зменшує в ньому електричні втрати в цих режимах роботи). Розглянемо роботу пристрою на Фіг.3 у сталому режимі роботи, коли відхилення ∆Іx, ∆Іy проекцій струму знаходилися усередині припустимої області відхилень (у вигляді кола на Фіг.6) і досягли границі (у точці N на Фіг.6) цієї області. При цьому змінюється з лог. «0» на лог. «1» вихідний сигнал компаратора 62, що надходить на вхід формувача імпульсів 64, внаслідок чого (у момент зміни фронту вхідного сигналу з лог. «0» на лог. «1») на виході формувача 64 формується вузький імпульс (тривалістю кілька мікросекунд). При впливі цього сигналу на керуючі входи регістрів 32 й 33 (що містяться в складі блоку 11, показаного на Фіг.1) на виході цих регістрів установлюються: значення ∆U′x 0 (m ), ∆U′y 0 (m ) , що відповідають значенням проекцій ∆Ux (m ), ∆Uy (m ) прогнозоваv них результуючих векторів напруги ∆U(m) на границі (у точці N) їхньої припустимої області, і значення ∆І’x 0, ∆І’y 0 відхилень ∆Іx, ∆Іy проекцій струму, які також відповідають (у точці N) границям припустимої області відхилень на Фіг.6. По закінченні вузького одиничного імпульсу на виході формувача імпульсів 64 (що є другим виходом блоку порівняння 12) забороняється зміна вихідних сигналів ∆U′x 0 (m ), ∆U′y 0 (m ) й ∆І’x 0, ∆І’y 0 згаданих регістрів 32 й 33. Через дані сигнали, що надходять на перший і другий входи другого обчислювача прогнозуючого функціонала 10, розраховують у цьому обчислювачі для всіх можливих комбінацій (m = 1, 2,... 6) відкритих і закритих силових ключів перетворювача 1 значення F2 (m) другого прогнозуючого функціонала, з яких за допомогою другого обчислювача екстремального значення 8 знаходять екстремальне значення F02 даного функціонала й відповідне йому нове значення m’2 комбінації силових ключів перетворювача 1. Дана комбінація m’2 силових ключів 16-21 перетворювача 1 забезпечує повернення (по траєкторії NS на Фіг.6) відхилень ∆Іx, ∆Іy проекцій струму в межі припустимої для них області й задає мінімально можливе значення частоти перемикання силових ключів перетворювача 1 у сталих режимах роботи. Якщо за час обчислення зазначеної нової комбінації m’2 силових ключів перетворювача 1 модуль ∆І узагальненого вектора відхилень струму ∆ I (обчислює на виході квадратора 61) не перевищує уставки, рівної (h + ∆h), то на виході релейного елемента 63 є присутнім сигнал, рівний лог. «1», 44892 30 що забезпечує стан мультиплексора 6, протилежний показаному на Фіг.3. При цьому відповідно до зазначеної обчисленої комбінації m’2 задають (з виходу другого обчислювача екстремального значення 8 через мультиплексор 6, перетворювач коду 5 і блок формувачів імпульсів 4) з табл. 1 таку комбінацію відкритих і закритих силових ключів 1621 перетворювача 1, що забезпечує мінімально можливу частоту перемикання силових ключів перетворювача 1 у сталих режимах. Далі для пристрою на Фіг.3 робота повторюється й відповідає розглянутому сталому режиму. Розглянемо роботу пристрою на Фіг.3, коли при виході відхилень ∆Іx, ∆Іy проекцій струму із припустимої області модуль АІ узагальненого вектора відхилень струму перевищив уставку, рівну (h + ∆h). У цьому випадку на виході релейного елемента 63 установлюється сигнал лог. «1», що приводить до зміни стану (на відповідне показаному на Фіг.3) мультиплексора 6. При цьому з виходу першого обчислювача екстремального значення 7 задають (через мультиплексор 6, перетворювач коду 5 і блок формувачів імпульсів 4) комбінацію m1 відкритих і закритих силових ключів 16-21 перетворювача 1 такою, яка забезпечує швидкодіюче векторне регулювання струму на стороні змінного струму перетворювача 1 (що виконує в пристрої на Фіг.3 роль активного фільтра) у динамічних режимах роботи. Далі робота пристрою на Фіг.3 повторюється й відповідає раніше розглянутій роботі цього пристрою для динамічних режимів роботи. Таким чином, запропонованим способом векторного регулювання струму (реалізованим у пристроях, показаних на Фіг.1, Фіг.2 і Фіг.3) забезпечується: по-перше, швидкодіюче регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача 1 - у динамічних режимах роботи, і, по-друге, мінімально можлива (при заданих границях припустимої області відхилень проекцій струму) частота перемикання силових ключів даного перетворювача - у сталих режимах роботи. Останнє дозволяє зменшити електричні втрати в цьому перетворювачі в сталих режимах роботи, а, отже, - досягти додаткового енергозбереження в частотно-регульованих асинхронних електроприводах й активних фільтрах, створюваних на основі згаданого трифазного чотириквадрантного перетворювача. Джерела інформації: 1. Волков А.В. Оптимальное по быстродействию векторное регулирование статорного тока в частотно-управляемых асинхронных электроприводах с широтно-импульсной модуляцией // Электротехника. - 2003. - №12. - С.34-43. 2. Патент на корисну модель №UA 30472U. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача / О.В. Волков, В.О. Волков - МПК (2006) Н02Р 7/00, Н02Р 21/00. Бюл.№4, 25.02.2008 3. Пивняк Г.Г., Волков А.В. Современные частотно-регулируемые асинхронные электроприводы с широтно-импульсной модуляцией. - Дніпропетровськ: НГУ, 2006. - 470с. 33 44892 34 35 44892 36 37 Комп’ютерна верстка А. Крулевський 44892 Підписне 38 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for current vector control on the side of alternating current of three - phase four-quadrant converter
Автори англійськоюVolkov Oleksandr Vasyliovych, Volkov Volodymyr Oleksandrovych, Antonov Mykola Leonidovych
Назва патенту російськоюСпособ векторного регулирования тока на стороне переменного тока трехфазного четырехквадрантного преобразователя
Автори російськоюВолков Александр Васильевич, Волков Владимир Александрович, Антонов Николай Леонидович
МПК / Мітки
МПК: H02P 21/00, H02P 7/00
Мітки: спосіб, змінного, чотириквадрантного, регулювання, векторного, трифазного, стороні, струму, перетворювача
Код посилання
<a href="https://ua.patents.su/19-44892-sposib-vektornogo-regulyuvannya-strumu-na-storoni-zminnogo-strumu-trifaznogo-chotirikvadrantnogo-peretvoryuvacha.html" target="_blank" rel="follow" title="База патентів України">Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача</a>
Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача
Номер патенту: 30472
Опубліковано: 25.02.2008
Автори: Волков Володимир Олександрович, Волков Олександр Васильович
МПК: H02P 21/00, H02P 7/00
Мітки: регулювання, векторного, стороні, перетворювача, струму, трифазного, чотириквадрантного, змінного, спосіб
Формула / Реферат:
1. Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача, що полягає в тому, що контролюють фазні електрорушійну силу (ЕРС) на стороні змінного струму й напругу на стороні постійного струму цього перетворювача, через які визначають на осі абсцис і ординат ортогональної координатної системи відповідно проекції узагальненого вектора ЕРС і прогнозовані значення проекцій узагальненого вектора...
Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються
Номер патенту: 30471
Опубліковано: 25.02.2008
Автори: Волков Олександр Васильович, Косенко Ігор Олександрович
МПК: H02P 21/00, H02P 7/00
Мітки: інвертором, спосіб, струму, електроприводі, автономним, асинхронному, регулювання, замикаються, тиристорах, трифазним, векторного
Формула / Реферат:
1. Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, який полягає у тому, що задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора...
Спосіб регулювання напруги змінного струму
Номер патенту: 86101
Опубліковано: 25.03.2009
Автори: Богачев Олександр Миколайович, Костенко Костянтин Федорович, Мицкевич Олександр Сергійович, Калугін Віталій Володимирович
Мітки: змінного, струму, регулювання, спосіб, напруги
Формула / Реферат:
Спосіб регулювання величини напруги змінного струму, за яким здійснюють перетворення напруги у послідовність біполярних імпульсів значно більш високої частоти відноcно частоти вхідної напруги змінного струму, тривалість яких визначає величину напруги, що регулюється, а зазначене перетворення здійснюють шляхом протифазного замикання і розмикання двох ключів, який відрізняється тим, що напругу змінного струму подають на вхід 2 паралельного реле...
Спосіб регулювання величини напруги змінного струму
Номер патенту: 28297
Опубліковано: 10.12.2007
Автори: Богачев Олександр Миколайович, Костенко Костянтин Федорович, Мицкевич Олександр Сергійович, Калугін Віталій Володимирович
МПК: H02M 5/02
Мітки: спосіб, напруги, струму, регулювання, величини, змінного
Формула / Реферат:
Спосіб регулювання величини напруги змінного струму, за яким здійснюють перетворення напруги у послідовність біполярних імпульсів значно більш високої частоти відносно частоти вхідної напруги змінного струму, тривалість яких визначає величину напруги, що регулюється, а зазначене перетворення здійснюють шляхом протифазного замикання і розмикання двох ключів, який відрізняється тим, що напругу змінного струму подають на вхід 2 паралельного реле...
Спосіб обмеження вихідних струмів трифазного мостового інвертора напруги з широтно-імпульсним регулюванням вихідної напруги, який живить двигун змінного струму
Номер патенту: 20237
Опубліковано: 15.01.2007
Автори: Скалько Юрій Сергійович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: мостового, обмеження, широтно-імпульсним, живить, напруги, струму, інвертора, вихідної, трифазного, змінного, вихідних, регулюванням, струмів, спосіб, двигун
Формула / Реферат:
Спосіб обмеження вихідних струмів трифазного мостового інвертора з широтно-імпульсним регулюванням вихідної напруги, який живить двигун змінного струму, який полягає у тому, що контролюють вихідні фазні струми інвертора, порівнюють миттєві абсолютні значення кожного з контрольованих вихідних фазних струмів інвертора з припустимим для них граничним значенням, і якщо ці струми не перевищують граничного значення, задають відкриті і закриті стани...
Попередній патент: Полімерна композиція з нанокомпонентами
Наступний патент: Спосіб ударно-розвантажувальної дії на продуктивний гірничий масив
Випадковий патент: Спосіб діагностики ступеня тяжкості генералізованого пародонтиту