Пристрій для вимірювання відстані за допомогою ультразвуку (варіанти)
Формула / Реферат
1. Устройство для измерения расстояния с помощью ультразвука, содержащее передатчик, который подает сформированный в виде импульсов сигнал, и приемник, который принимает отраженный сигнал находящегося на подлежащем измерению расстоянии отражателя и преобразует его в электрический сигнал, причем по временному интервалу между излученным сигналом и отраженным сигналом посредством устройства обработки сигналов определяется расстояние, отличающееся тем, что отраженный сигнал подается на пороговый переключатель с изменяемым порогом переключения (S) и измерение времени осуществляется между началом сформированного в виде импульсов сигнала возбуждения (S1) и моментом времени первого превышения порога переключения (S).
2. Устройство для измерения расстояния с помощью ультразвука, содержащее передатчик, который подает сформированный в виде импульсов сигнал, и приемник, который принимает отраженный сигнал находящегося на подлежащем измерению расстояния отражателя и преобразует в электрический сигнал, причем по временному интервалу между сигналом и отраженным сигналом посредством устройства обработки сигналов определяется расстояние, отличающееся тем, что отраженный сигнал подан на усилитель с изменяемым коэффициентом усиления (К), выходной сигнал которого подается на пороговый переключатель с жестким порогом переключения (S) и измерение времени осуществляется между началом сформированного в виде импульсов сигнала возбуждения (S1) и моментом времени первого превышения порога переключения (S).
3. Устройство для измерения расстояния с помощью ультразвука, содержащее передатчик, который подает сформированный в виде импульсов сигнал, и приемник, который принимает отраженный сигнал находящегося на подлежащем измерению расстояния отражателя и преобразует его в электрический сигнал, причем по временному интервалу между сигналом и отраженным сигналом посредством устройства обработки сигналов определяется расстояние, отличающееся тем, что отраженный сигнал (S3) подается на пороговый переключатель с жестким порогом переключения (S), а излученный передатчиком сигнал может изменяться по своей силе, а измерение времени осуществляется между началом сформированного в виде импульсов сигнала возбуждения (S1) и моментом времени первого превышения порога
переключения (S).
4. Устройство по п. 1 или 2 или 3, отличающееся тем, что передатчик и приемник выполнены в виде единого ультразвукового преобразователя.
5. Устройство по одному из предыдущих пунктов 1-4, отличающееся тем, что порог переключения (S) порогового переключателя, коэффициент усиления (К) усилителя или интенсивность сигнала передатчика изменяются в зависимости от отраженного сигнала.
6. Устройство по п. 5, отличающееся тем, что изменение порога переключения (S) или коэффициента усиления (К) осуществляется в зависимости от разностного промежутка времени (Тd).
7. Устройство по п. 6, отличающееся тем, что установление разностного промежутка времени (Td) осуществляется в зависимости от превышения порога переключения (S) отраженным сигналом (S3).
8. Устройство по п. 5, отличающееся тем, что изменение интенсивности передачи осуществляется путем выбора длительности, по меньшей мере, одного строб-импульса, который воздействует на ультразвуковой чувствительный элемент.
9. Устройство по п. 8, отличающееся тем, что подаются два строб-импульса, причем интервал между этими импульсами выбирается таким образом, что уменьшается интенсивность передачи ультразвукового чувствительного элемента.
10. Устройство по п. 8 или 9, отличающееся тем, что интервал между строб-импульсами определяется вычислительным устройством в зависимости от ранее принятых отраженных сигналов.
11. Устройство по п. 10, отличающееся тем, что интервал между двумя строб-
импульсами определяется путем моделирования, причем ультразвуковой чувствительный элемент рассматривается как независимая от времени линейная система.
12. Устройство по п. 10, отличающееся тем, что выходной сигнал ультразвукового чувствительного элемента образуется путем свертки входного сигнала с функцией Грина, независимой от времени линейной системы.
Текст
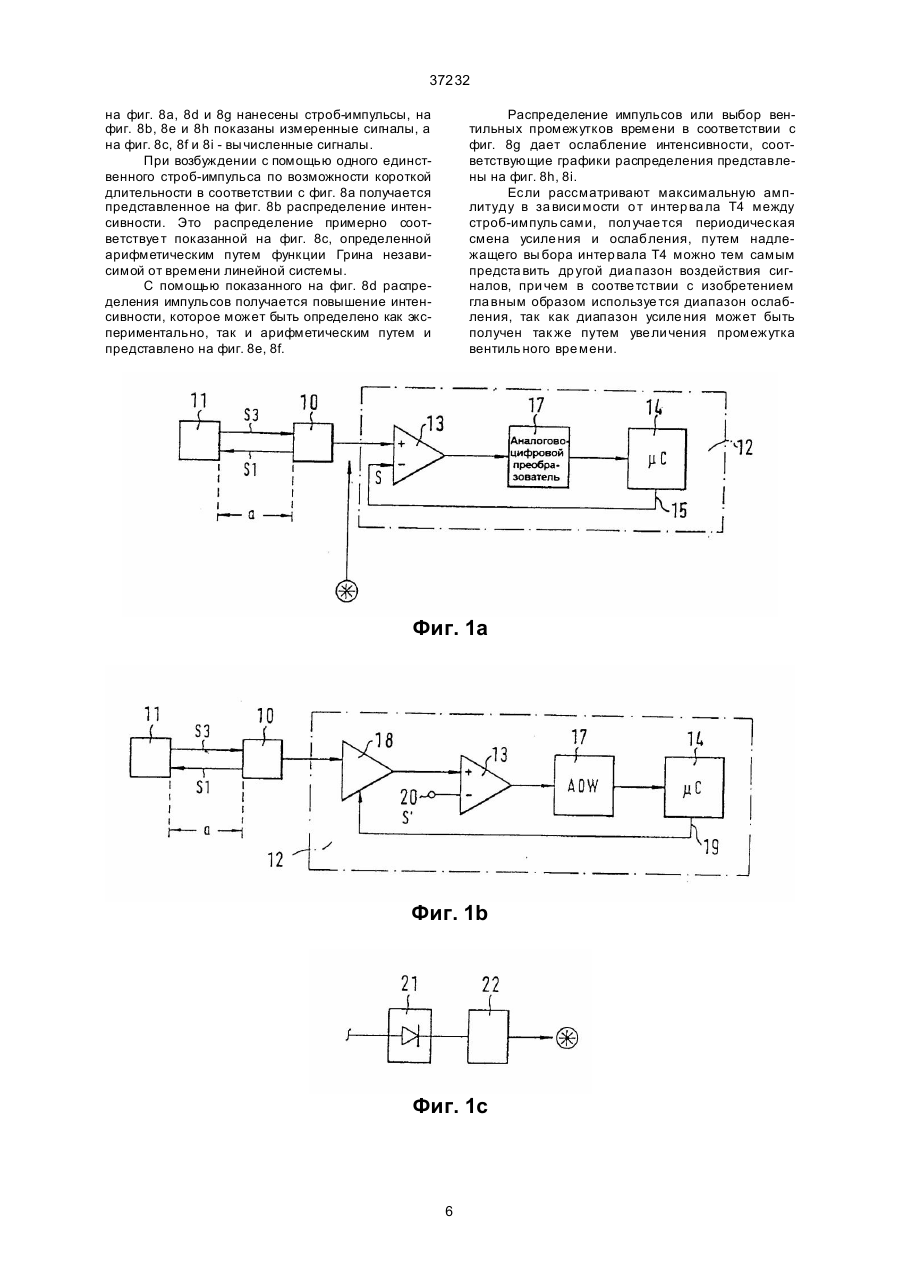
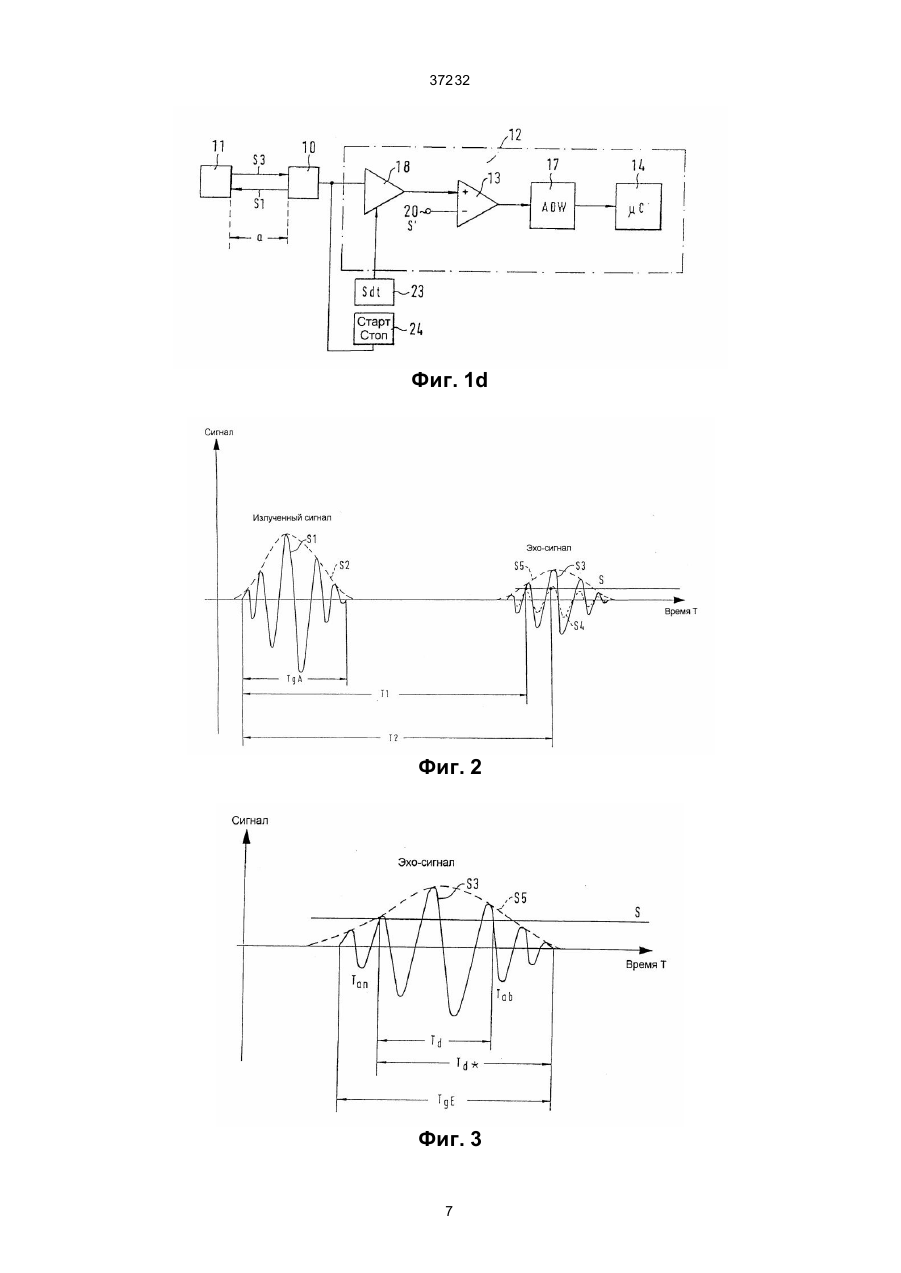
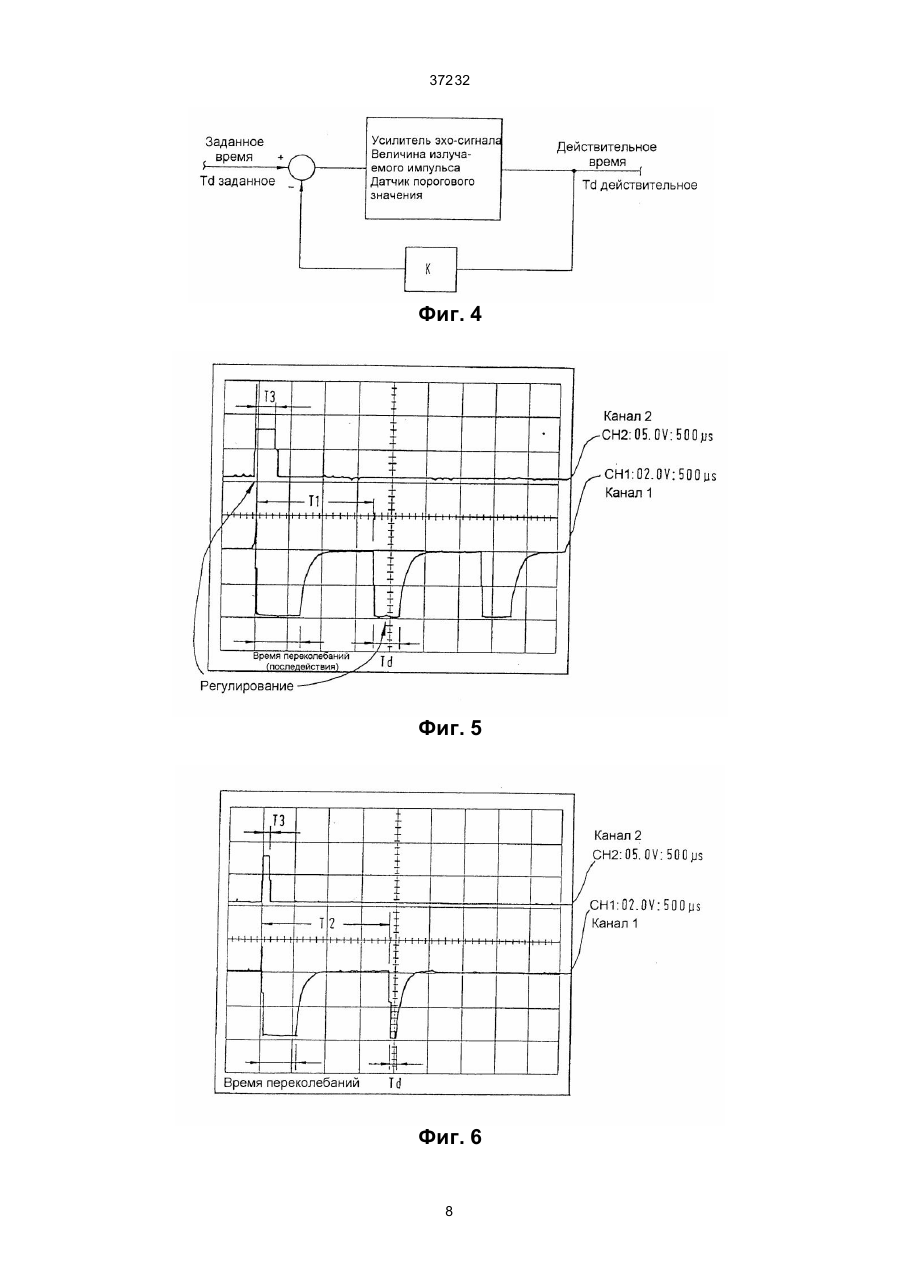
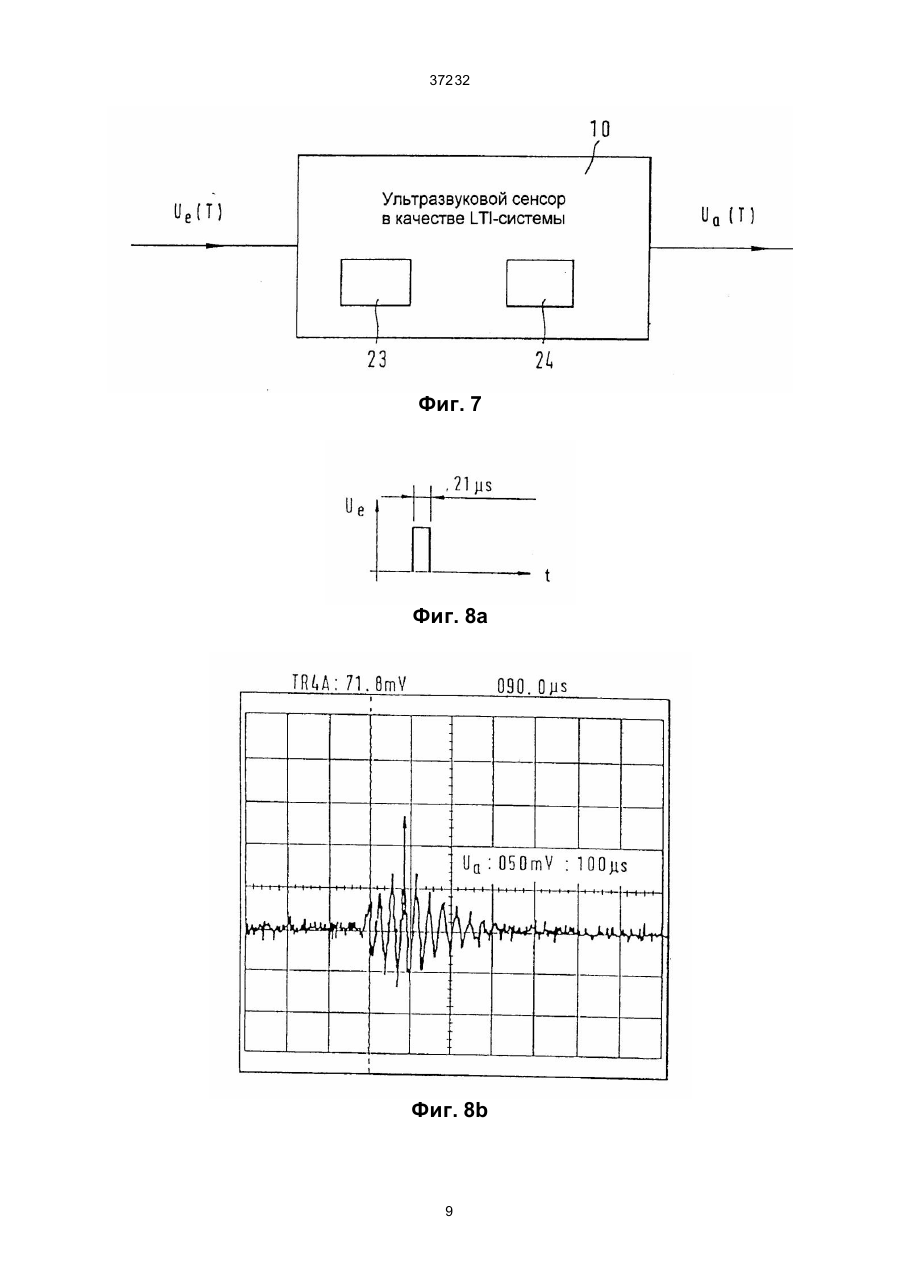
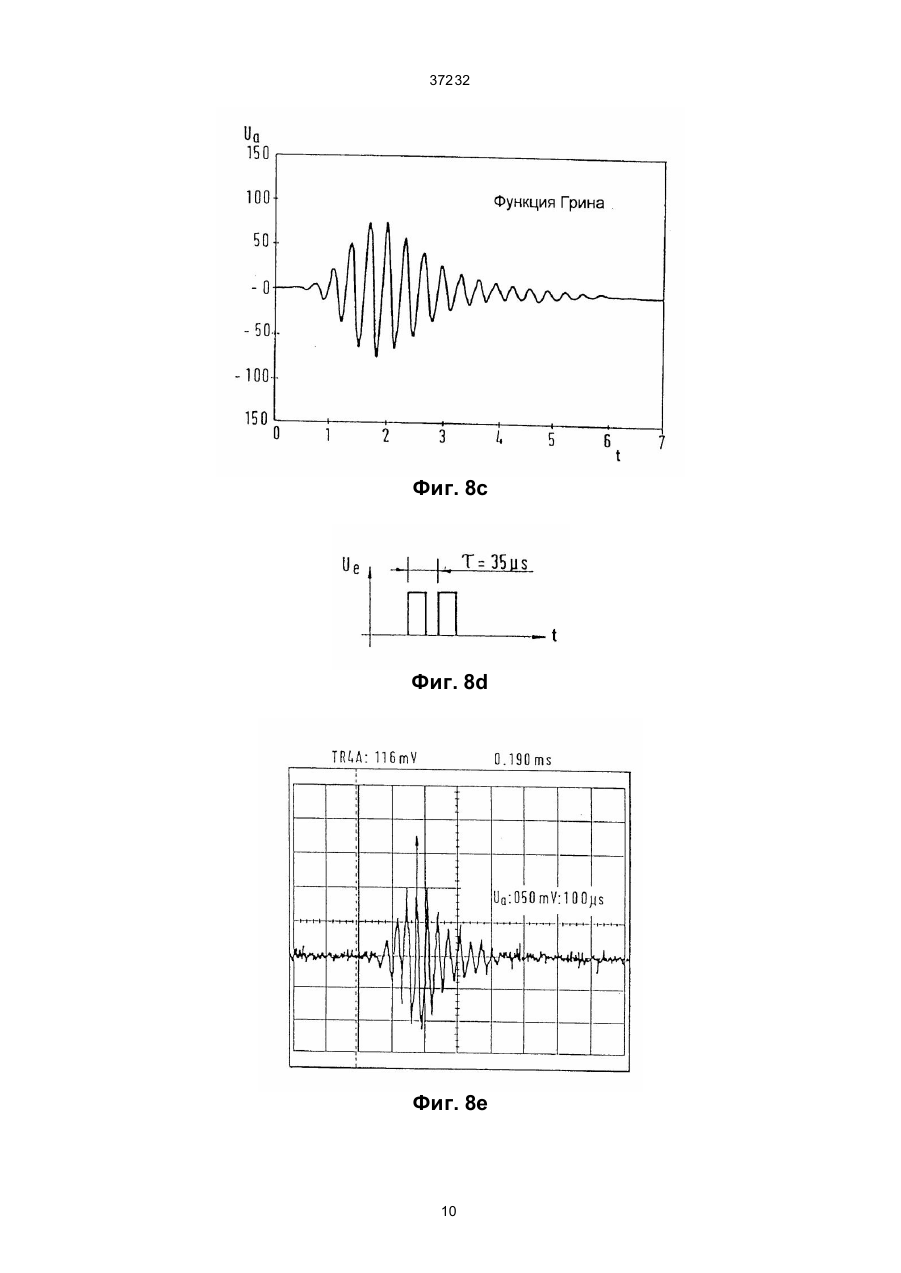
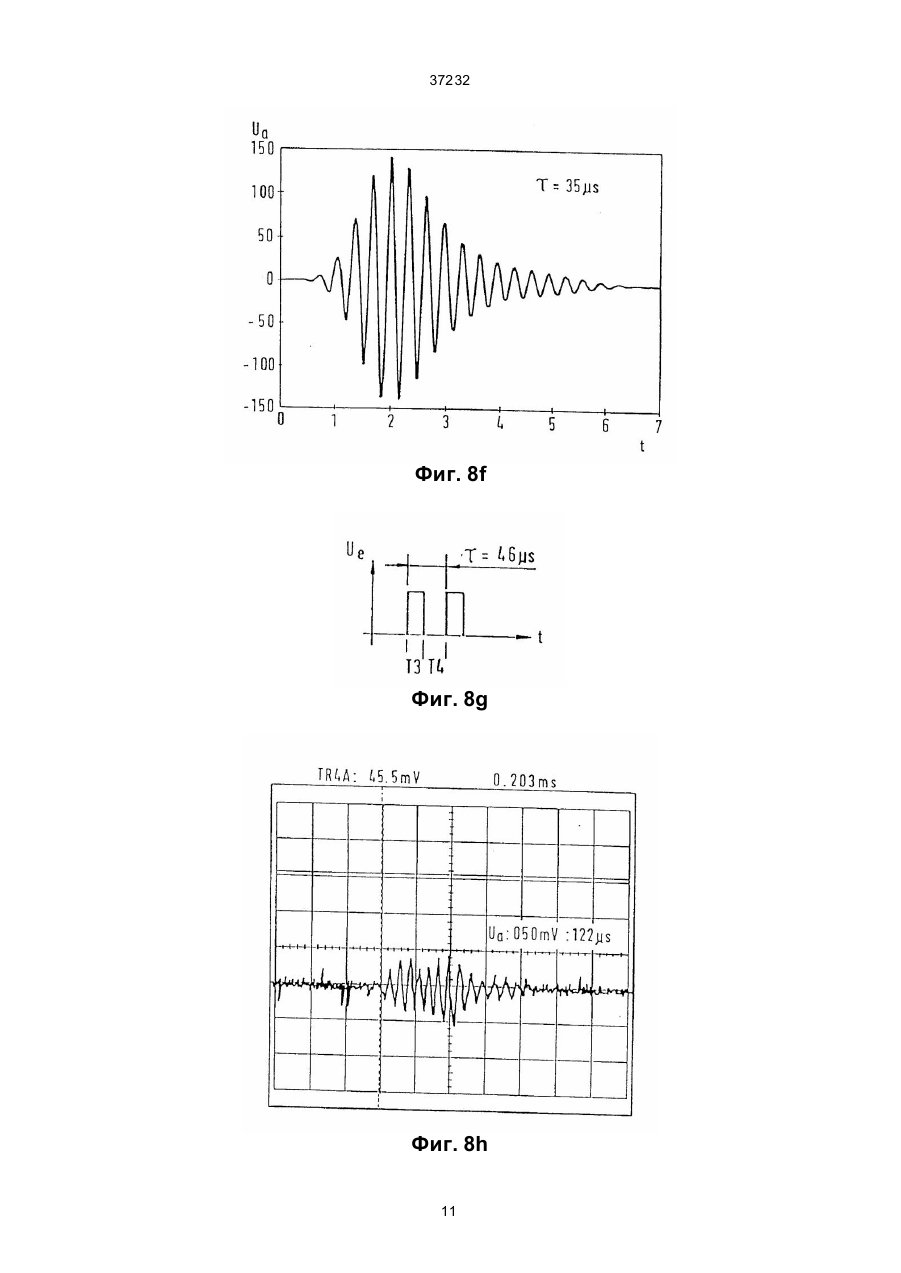
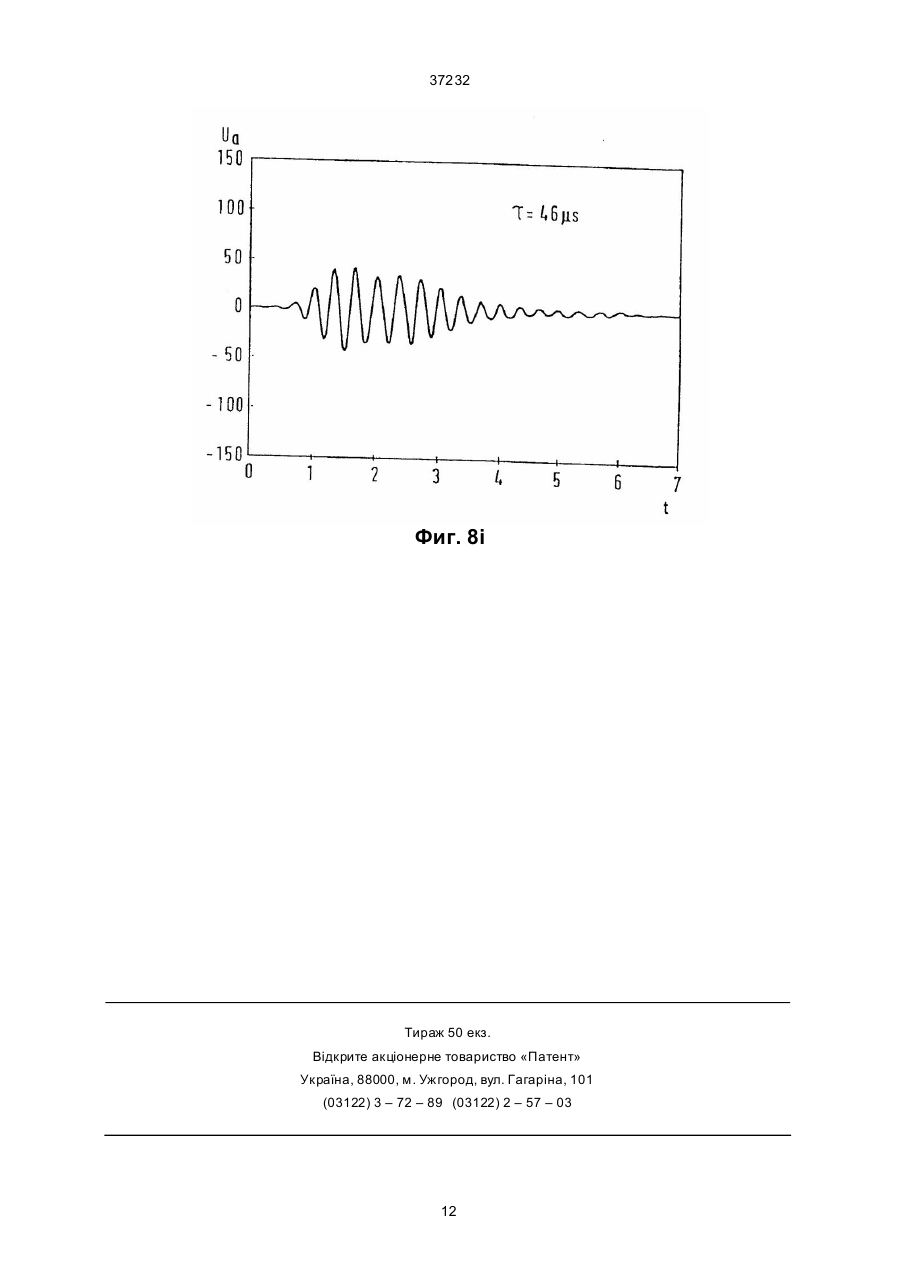
1. Устройство для измерения расстояния с помощью ультразвука, содержащее передатчик, который подает сформированный в ви де импульсов сигнал, и приемник, который принимает отраженный сигнал находящего ся на подлежащем измерению расстоянии отражателя и преобразует его в электрический сигнал, причем по временному интервалу между излученным сигналом и отраженным сигналом посредством устройства обработки сигналов определяется расстояние, отличающееся тем, что отраженный сигнал (3) подается на пороговый переключатель (13) с изменяемым порогом переключения (S) и измерение времени осуществляется между началом сформированного в ви де импульсов сигнала возбуждения (S1) и моментом времени первого превыше ния порога переключения (S). 2. Устройство для измерения расстояния с помощью ультразвука, содержащее передатчик, который подает сформированный в виде импульсов сигнал, и приемник, который принимает отраженный сигнал находящего ся на подлежащем измерению расстояния отражателя и преобразует в электрический сигнал, причем по временному интервалу между сигналом и отраженным сигналом посредством устройства обработки сигналов определяется расстояние, отличающееся тем, что отраженный сигнал подан на усилитель (18) с изменяемым коэффи циентом усиления (К), выходной сигнал которого подается на пороговый переключатель (13) с жестким порогом переключения (S) и измерение времени осуществляется между началом сформированного в виде импульсов сигна C2 (54) ПРИСТРIЙ ДЛЯ ВИМIРЮВАННЯ ВIДСТАНI З А ДОПОМОГОЮ УЛЬТРАЗВУКУ (ВАРIАНТИ) 37232 11. Устройство по п. 10, отличающееся тем, что интервал между двумя строб-импульсами определяется путем моделирования, причем ультразвуковой чувствительный элемент рассматривается как независимая от времени линейная система. 12. Устройство по п. 10, отличающееся тем, что выходной сигнал ультразвукового чувствительного элемента образуется путем свертки входного сигнала с функцией Грина, независимой от времени линейной системы. ______________________________ Изобретение касается устройства для бесконтактного измерения расстояния с помощью ультразвука в соответствии с ограничительной частью пункта 1 формулы изобретения. Известно проведение бесконтактных измерений с помощью измерения времени прохождения ультразвука. При этом, в частности, в сочетании с устройствами для предупреждения столкновения у транспортных средств, которые известны из еще не опубликованной заявки на патент № Р 4120697, описывается, каким образом преобразователем звука излучается короткий ультразвуковой сигнал и при наличии препятствия отражается от него и вновь принимается преобразователем звука. По времени прохождения рассчитывается расстояние между преобразователем звука и отражающим сигнал препятствием. Так как уровень отраженного сигнала зависит не только от уровня отраженного сигнала, но и от качества отражателя, при оценке отраженного сигнала (эхосигнала) возникают проблемы. Возможность использования отраженного сигнала (эхосигнала) для формирования метки времени заключается в сравнении отраженного сигнала в переключателе порогового значения с порогом переключения, так что на выходе переключателя порогового значения сигнал появляется в том случае, если отраженный сигнал превышает пороговое значение. Установление уровня порога переключения должно осуществляться таким образом, чтобы он, с одной стороны, был достаточно высок, чтобы ослаблять нежелательный посторонний отраженный сигнал, а с другой стороны, даже при сильно поглощающем отраженный сигнал отражателе он должен превышать порог переключения, так как в противном случае невозможна никакая индикация. Преимущества изобретения. Устройство согласно изобретению с отличительными признаками основного пункта формулы изобретения имеет по сравнению с известными устройствами преимущество, заключающееся в том, что или вообще не используется жесткий порог переключения, или используется порог переключения, уровень которого может изменяться в зависимости от обрабатываемых отраженных сигналов или от предшествующи х отраженных сигналов, или что усиление отраженного сигнала может изменяться в зависимости от предшествующи х отраженных сигналов. В другом предпочтительном примере выполнения изобретения уровень отраженного сигнала поддерживается примерно постоянным путем изменения интенсивности излученного сигнала в зависимости от ранее полученных отраженных сигналов и тем самым может сравниваться с жестким пороговым значением. Воздействие интенсивности излученного сигнала дости гается благодаря тому, что преобразователь ультразвука с целью оценки импульсов возбуждается в течение изменяемого времени, причем это время, которое называется вентильным временем, определяется на основании следующи х соображений: Так как излученные ультразвуковые сигналы в общем случае являются короткими пакетами сигналов, примерно с четырьмя - шестью максимумами и с таким же количеством минимумов, и так модуляционная огибающая отраженного сигнала имеет в общем такую же форму модуляционной огибающей, что и излученный сигнал, можно путем оценки формы модуляционной огибающей получить критерий необходимого изменения порога переключения или усиления. При этом предпочтительным образом необходимое изменение определяется путем измерения зависящего от интенсивности определенного времени, которое проходит между первым превышением порога переключения отраженным сигналом и последним превышением. Это время зависит от уровня отраженного сигнала и поэтому особенно предпочтительна может использоваться для изменения порогового значения. Так как вентильное время не может быть сделано сколь угодно коротким, выходной сигнал преобразователя ультразвука, т. е. излученный сигнал, не может ослабляться сколь угодно. Путем установления двух коротких промежутков вентильного времени, расстояние между которыми выбирается надлежащим образом, можно получить особенно сильное ослабление выходного сигнала, если осуществленное во втором вентильном промежутке времени возбуждение, по меньшей мере, частично компенсирует осуществленное в течение первого вентильного промежутка времени, тем самым предпочти тельным образом можно добиться расши рение диапазона в направлении уменьшения излученного сигнала. Примеры выполнения изобретения представлены на чертеже с помощью нескольких фигур и более детально поясняются в нижеследующем описании. При этом, в частности, показывают: фиг. 1а: первую схематическую компоновку измерительной аппаратуры; фиг. 1b: вто рую схе матическую компоновку измерительной аппаратуры; фиг. 1с: до полнение к фиг. 1а; фиг. 1d: другой пример выполнения измерительной системы; фиг. 2: временная характе ристика излученного сигнала, а также принятого отраженного сигнала, включая порог переключения; фиг. 3 : характеристика отраженного сигнала по времени Т с важными для оценки отрезками времени; 2 37232 ния; фиг. 4: воз можное устройство регули рова На основании этого временного промежутка между излученным сигналом и отраженным сигналом можно определить расстояние между ультразвуковым преобразователем 10 и отражателем 11 при знании скорости распространения ультразвука, однако необхо димо, это расстояние определить однозначно, с учетом очень различных уровней отраженных сигналов. Для установления времени Т1 между излученным сигналом S1 и отраженным сигналом отраженный сигнал подается в пороговый переключатель 13, который имеет порог переключения S и всегда тогда, когда отраженный сигнал превышает порог переключения, выдает выходной сигнал, который в аналого-цифровом преобразователе 17 преобразуется в цифровые величины и оценивается в микрокомпьютере. Промежуток времени между началом излученного сигнала S1 и первым превыше нием порога переключения отраженным сигналом S3 измеряется в микрокомпьютере и затем используется для определения расстояния между ультразвуковым преобразователем 10 и отражателем 11, причем из фиг. 2 можно видеть, что это время при высоком уровне отраженного сигнала и в том же пороге переключения S3 равно Т1, а при более низком уровне отраженного сигнала и том же пороге переключения S равно Т2, так как в этом случае даже вторая положительная полуволна отраженного сигнала еще не может превысить порог переключения S, а только третья положительная волна превышает порог переключения S. Чтобы эти различные промежутки времени Т1 и Т2 не привели к ошибочному измерению, в примере выполнения в соответствии с фиг. 1 порог переключения изменяется в зависимости от предшествующего отраженного сигнала. Возможность, как изменения могут быть реализованы, поясняет фиг. 3. На фиг. 3 представлена диаграмма отраженного сигнала в зависимости от времени Т, кроме того показан порог переключения S. Первое превышение порога переключения S сигналом Sз обозначено символом Tan, последнее превышение - символом Таb. Разность между Т аb и Tan обозначена символом Тd и разность между исчезновением сигнала S3 и временем Tan обозначена как промежуток времени Тd*. Общее время междуабсолютным началом отраженного сигнала S3 и его абсолютным концом определяется промежутком времени Тg . Разность Td обоих промежутков времени Таb и Tan может служить критерием относительного положения порога переключения к мгновенной величине отраженного сигнала. При более низком уровне отраженного сигнала только средний и тем самым наибольший максимум превысили бы порог переключения, в этом случае передний фронт максимума определял бы Tan и задний фронт Таb. Следствием этого был бы значительно более короткий промежуток времени Тd, чем в примере в соответствии с фиг. 3. При еще более низком уровне отраженного сигнала порог переключения вообще больше не достигается или не превышается, в этом случае временная разность Тd больше не может быть определена. фиг. 5 и 6: две осциллограммы для оценки с помощью колебательной мембраны; фиг. 7: в грубой схематической форме ультразвуковой преобразователь; фиг. 8a-8i: примеры излученных сигналов, которые посылаются преобразователем ультразвука при различных импульсных возбуждениях, при этом отображении как измеренные, так и рассчитанные сигналы. Описание примера выполнения. На фиг 1а - 1d позицией 10 обозначен ультразвуковой преобразователь, в котором формируется излучаемые сигналы S1, в которые подают на рефлектор II и оттуда отражаются и вновь попадают в ультразвуковой преобразователь в ви де отраженного сигнала (эхосигнала) S3. В ультразвуковом преобразователе 10 отраженные сигналы преобразуются в электрические сигналы, которые в последующем устройстве 12 обработки сигналов оцениваются с целью определения расстояния «а» между ультразвуковым преобразователем 10 и отражателем 11. В зависимости от принципа оценки конструкция устройства 12 обработки сигналов может быть различной, в представленном на фиг. 1а примере выполнения в качестве существенного конструктивного элемента предусмотрен пороговый переключатель 13, к не инвертируе мому входу (+) которого подается отраженный сигнал, в то вре мя как на его инвертируемый вход (-) подается изменяемая пороговая величина и образует переменный порог переключения. Выход порогового переключателя 13 через аналого-цифровой преобразователь 17 соединен с микрокомпьютером 14, который по линии 15 может воздействовать на пороговую ве личину S, поданную на инверти руемый вход порогового переключателя 13. На фиг. 2 представлены графики излученного сигнала S1 и отраженного сигнала (эхосигнала) в зависимости от времени Т, при этом можно видеть, что излученный сигнал состоит из пакета импульсов с несколькими максимумами и минимумами, причем распределение импульсов имеет колоколобразную модуляционную огибающую. Сам излученный сигнал обозначен символом S1, модуля ционная огибающая обозначена символом S2. Если ультразвуковой преобразователь 10 излучает сигнал S1, то этот сигнал по истечении времени Т1 отражается от отражателя 11, который находится на некотором расстоянии «а», и превращается в отраженный сигнал S3, форма и модуляционная кривая которого в значительной степени соответствует фор ме или модуля ционной огибающей сигнала S1, однако ослаблены по уровню. В зависимости от ви да (типа) отражателя 11, а также расстояния между ультразвуковым преобразователем и отражателем принятый отраженный сигнал S3 имеет большую амплитуду или при плохом отражении меньшую амплитуду, на фиг. 2 отраженный сигнал с меньшей амплитудой обозначен символом S4, и как уже было упомянуто, вновь имеет колоколобразную форму. 3 37232 При увеличенном уровне отраженного сигнала промежуток времени Td возрастает почти до общей длительности Тg отраженного сигнала, так как в этом случае уже первый и еще последний максимумы могут превышать порог переключения. Тем самым очевидно, разностный промежуток времени Td представляет собой критерий, который позволяет надлежащим образом приводить в соответствие порог переключения с регистрируемым отраженным сигналом, причем для случая, когда Td не может быть определен, необхо димо принимать отдельную меру. Преобразование разностного промежутка вре мени Td в при годный для обработки сигнал, например, постоян ное напряжение, осуще ствляется, как будет описа но ниже, с помощью микрокомпьютера 14 и позволяет особен но простому смещению по рога переключения S, причем регули рова ние или смещение порога предусмотрено та ким образом, что вследствие смещения порога промежуток времени Тd остается примерно постоянным. Тем самым и метка времени Tan так же становится независимой от величи ны отраженного сигнала S3, детекти руются даже слабые отраженные сигналы и метка времени всегда появляется в том же са мом месте серии во лн си гнала S3. Для воздействия порога переключения вместо разностного промежутка времени Тd может использоваться также разностный промежуток времени Тd*, так как этот промежуток времени (продолжительность) также является критерием относительного положения порога переключения относительно мгновенной в данный момент времени величины отраженного сигнала. Наряду с воздействием порога переключения с помощью образованного из разностного промежутка времени Тd или разностного промежутка времени Тd* постоянного напряжения можно также изменять усиление отраженного сигнала, в этом случае предусмотрено обрабатывающее устройство 12 в соответствии с фиг. 1b. В обрабатывающем устройстве 12 в соответствии с фиг. 1b между ультразвуковым преобразователем 10 и пороговым переключателем 13 дополнительно расположен регулируе мый усилитель 18, коэффи циент усиления которого может изменяться микропроцессором 14 по линии 19, причем изменение коэффи циента усиления осуществляется в зависимости от ранее определенного разностного промежутка времени Тd или Тd* уп равление изменением осуществляется микрокомпьютером 14. В этом примере выполнения пороговый переключатель 13 имеет постоянный порог переключения S', который приложен и подается к его инвертируемому вхо ду 20. Так как к пороговому переключателю 13 подается регули руемое входное напряжение усилителя 18, порог переключения S' может оставаться постоянным и несмотря на это остается метка времени Таn независимой от зарегистрированного до усиления отраженного сигнала. Тем самым время Т1 также не зависит от уровня отраженного сигнала. Другая возможность использования разностного промежутка времени Тd или Тd* для воздейст вия порога переключения S или коэффициента усиления К поясняется с помощью представленной на фиг. 5 и 6 диаграммы для ультразвукового преобразователя 10, построение которого представлено в виде грубого эскиза на фиг. 7. При этом существенным является то, что ультразвуковой преобразователь 10 имеет способную со вершать колебания мембрану 23, которая с помощью осциллятора 24, совершает колебания с ультразвуковой частотой, совершает эти колебания в течение заранее заданных промежутков времени, например, в течение времени ТЗ, и при этом выдает ультразвуковые импульсы, которые в конечном итоге соответствуют из лученным сигналам. Пока амплитуда колебательной мембраны превышает заранее заданную пороговую ве личину, измерительный сигнал сдвигается. График измерительного сигнала в виде сигнала СН1 в зависимости от вре мени Т представлен на фиг. 5. Так как мембрана совершает переходные колебания, то во время этих колебаний отраженный сигнал приниматься не может. Сам отраженный сигнал смещает измерительный сигнал в соответствии с промежутком времени Т1. Мембрана, работающая те перь как приемник, колеблется до тех пор, пока остается перейденной заданная пороговая величина, а измерительный сигнал остается смещен ным. Временем, в течение которого измерительный сигнал остается смещен ным, является время Тd. Ре гули рование, т. е. поддержание постоянства, времени Тd происходит теперь благодаря воздействию интенсивности передачи. На фиг. 4 еще раз наглядно показаны три возможных мероприятия с помощью которых метка времени Tan делается независимой от уровня отраженного сигнала. При этом задается заданное время Tdsoll, измеряется фактическое время Tdist и сравнивается с заданным временем Tdsoll. В зависимости от результата сравнения увеличивается или уменьшается коэффициент усиления К усилителя 18, изменяется пороговая величина порогового переключателя 13 или уровень передаваемого импульса. Для определения разностного промежутка времени Тd могут быть использованы следующие возможности. 1. В микропроцессоре 14 подсчитывается количество превышений порога переключения отраженным сигналом S3, в зависимости от этого количества микропроцессор надлежащим образом воздействует на триггерный порог или изменяет усиление усилителя 18. При этом при большем числе превышений порога переключения, которое свидетельствует о вы соком уровне отраженного сигнала, или повышается порог переключения S или уменьшается коэффи циент усиления К усилителя 18. Обе меры способствуют то му, что появляется надлежащее число превышений, например, три, независимо от фактического уровня отраженного сигнала S3. Другая возможность определения времени Тd или получения независимо от времени Тd сигнала заключается в том, что отраженный сигнал выпрямляется и фильтруется так, что получается модуляционная огибающая отраженного сигнала. С этой целью отраженный сигнал направляется 4 37232 через выпрямитель 21 и фильтр 22, например, полосовой фильтр, от ультразвукового преобразователя 10 к пороговому каскаду 13 или к регули руемому усили телю 18. В этом случае компоновка схе мы в соответствии с фиг. 1а до полняется компоновкой в соответствии с фиг. 1с. Если кроме того с помощью порога переключения через стартстопный электронный блок 24 запускается интегратор 23, который при превышении этого порога переключения вновь останавливается, в качестве интегрированного сигнала получается постоянное напряжение, которое пропорционально времени, в течение которого был включен интегратор 23. Это постоянное напряжение может использоваться для воздействия усиле ния усилителя 18. Компоновка схемы, которая относится к этому определению времени Тd, приведена на фиг. 1d. При показанном на фиг. 5 распределении сигнала время передачи выбирается настолько большим, что принимаются даже вторичные отраженные сигналы. На фиг. 6 представлен пример, в котором время передачи было сокращено путем изменения заданной величины, в этом случае устанавливается более короткое время Тd, так что вто рой отраженный сигнал больше не превышает этот порог. Измеренное при этом время прохождения импульса Т2 в соответствии с фиг. 6 больше, чем время прохождения импульса Т1 с пороговой величиной в соответствии с фиг. 5. В другом примере выполнения изобретения, который относится к возможности изменения излученного сигнала S1 в зависимости от предшествующего отраженного сигнала S3, в ультразвуковом преобразователе 10 сигнал осциллятора передается дальше только для определенных промежутков времени. При этом осциллятор постоянно колеблется, дальнейшая передача сигнала осциллятора возможна с помощью строб-импульса, причем дальнейшая передача осуществляется только в течение длительности строб-импульса. Длительность этого строб-импульса Тт является решающей для длительности Тgа излученного сигнала S1, однако она является решающей также для амплитуды излученного сигнала S1. При этом с увеличением длительности строб-импульса возрастает амплитуда, выше определенной длительности строб-импульса амплитуда однако остается постоянной, следовательно, путем увеличения вентильного времени она больше повышаться не может. Ми нимальная амплитуда получается благодаря тому, что строб-импульс выбирается очень коротким, так что от осциллятора к мембране подается только очень короткий импульс. Так как строб-импульс не может быть сделан сколько угодно коротким, излученный ультразвуковым преобразователем сигнал не может изменяться сколько угодно в направлении минимальной интенсивности, так что в целом излученный сигнал может изменяться только в пределах определенного диапазона. Увеличение этого переменного диапазона в направлении еще более малых интенсивностей излучаемого сигнала в этом примере выполнения изобретения реализуется благодаря тому, что управление ультразвуковым преобразователем осуществляется с помощью двух о тдельных строб-импульсов, причем промежуток между этими строб-импульсами выбирается таким образом, что вто рой импульс действует ослабляюще в отношении первого импульса. Если оцен ка отра женного си гнала показывает, что необхо дим излучен ный сигнал, амплитуда которо го п утем укоро чения стробимпуль са не может больше умень ша ть ся, то даль нейше го умень ше ния амплитуды можно доби ться п утем по дачи вто рого ко роткого строб-им пуль са. Оцен ка отраженных си гналов и определе ние импульсо в осуществляется в микрокомпьютере 1 4. Для пояснения взаимосвязей следовало бы отметить следующее: если ультразвуковой чувствительный элемент рассматривается как независимая от времени линейная система (LT1-система), то ее временная характеристика может быть охарактеризована следующими высказываниями: с помощью управляющего импульса Uе(t) в качестве входной функции и отраженного сигнала Ua(t), который соответствует сигналу S3, в качестве выходной функции появляющийся отраженный сигнал получается путем свертки входной функции с функцией Грина G(T) независимо от времени линейной системы. Это может быть представлено следующей функцией: Ua(T)=Ue(T-t) x G(t)d. Если короткие строб-импульсы в приближенном виде понимаются как d-функция, то это известным образом становится ответом системы на короткий входной импульс для функции Грина. Для двух следующи х др уг за другом импульсов сигнал свертки прибавляетсяк сумме, в которой две функции Грина смещены по времени, которые относятся соответственно к d-импульсу. В за висимости от выбора интервала между строб-импульсами появляется усиление или ослабление импульса передачи. Поэтому с помощью надлежащего интервала с целью уменьшения интенсивности передачи достигается ослабление, надлежащие интервалы могут быть определены экспериментально или арифметическим путем, вычисления выполняются, например, в вычислительном устройстве 14. В лабораторных испытаниях были проведены как измерения, так и моделирование. При этом были получены хорошие соответствия между моделированием и измерением, тем самым было доказано, что система в хо рошем приближении может рассматриваться как независимая от времени линейная система (LT1-систе ма). На фиг. 7 в общем виде схе матически представлен ультразвуковой чувствительный элемент, к которому подается входной импульс Ue(t), длительность которого равна ТЗ и интервал которого, как можно позаимствовать из фиг. 3, соответствуе т Т4. При этом на выходе ультразвукового чувствительного элемента появляется выходное напряжение Ua(T). Ха рактеристика сигналов представлена на фиг. 8, при этом ха ракте ристика сигнала, который появляется после возбуждения с помощью стробимпульсов, показана для трех примеров, причем 5 37232 на фиг. 8а, 8d и 8g нанесены строб-импульсы, на фиг. 8b, 8е и 8h показаны измеренные сигналы, а на фиг. 8с, 8f и 8i - вы численные сигналы. При возбуждении с помощью одного единственного строб-импульса по возможности короткой длительности в соответствии с фиг. 8а получается представленное на фиг. 8b распределение интенсивности. Это распределение примерно соответствуе т показанной на фиг. 8с, определенной арифметическим путем функции Грина независимой от времени линейной системы. С помощью показанного на фиг. 8d распределения импульсов получается повышение интенсивности, которое может быть определено как экспериментально, так и арифметическим путем и представлено на фиг. 8е, 8f. Распределение импульсов или выбор вентильных промежутков времени в соответствии с фиг. 8g дает ослабление интенсивности, соответствующие графики распределения представлены на фиг. 8h, 8i. Если рассматривают максимальную амплитуду в за виси мости о т интер ва ла Т4 между строб-импуль сами, получае тся периодическая смена усиле ния и ослабления, путем надлежащего вы бора интер вала Т4 можно тем самым предста вить др угой диа пазон воздействия сигналов, при чем в соотве тствии с изобретением гла вным образом используе тся диапазон ослабления, так как диапазон усиле ния может быть получен так же путем уве ли чения промежутка вентиль ного вре мени. Фиг. 1a Фиг. 1b Фиг. 1c 6 37232 Фиг. 1d Фиг. 2 Фиг. 3 7 37232 Фиг. 4 Фиг. 5 Фиг. 6 8 37232 Фиг. 7 Фиг. 8a Фиг. 8b 9 37232 Фиг. 8c Фиг. 8d Фиг. 8e 10 37232 Фиг. 8f Фиг. 8g Фиг. 8h 11 37232 Фиг. 8i Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 12
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for distance measurement by means of ultrasound (versions)
Автори англійськоюRomes Roman, Dambakher Karl Haints
Назва патенту російськоюУстройство для измерения расстояния при помощи ультразвука (варианты)
Автори російськоюРомес Роман, Дамбахер Карл Хайнц
МПК / Мітки
МПК: G01S 15/00, G01S 7/523
Мітки: варіанти, ультразвуку, пристрій, відстані, вимірювання, допомогою
Код посилання
<a href="https://ua.patents.su/12-37232-pristrijj-dlya-vimiryuvannya-vidstani-za-dopomogoyu-ultrazvuku-varianti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання відстані за допомогою ультразвуку (варіанти)</a>
Пристрій для вимірювання швидкості поширення ультразвуку у біологічних тканинах
Номер патенту: 20886
Опубліковано: 07.10.1997
Автори: Логай Іван Михайлович, Красновід Тетяна Андрієвна, Ковальчук Олександр Георгійович
МПК: A61B 8/10
Мітки: поширення, тканинах, ультразвуку, вимірювання, біологічних, пристрій, швидкості
Формула / Реферат:
Устройство для измерения скорости распространения ультразвука в биологических тканях, содержащее нефокусирующий ультразвуковой преобразователь, генератор электрических импульсов, систему измерения времени прохождения ультразвукового сигнала в исследуемой биологический ткани, осциллограф, отличающееся тем, что оно содержит П-образную раздвижную скобу, снабженную прецизионным подающим устройством с микрометрической шкалой, на одной из бранш...
Спосіб вимірювання відстані до межі розділу повітря-поверхня матеріалу
Номер патенту: 17105
Опубліковано: 18.03.1997
Автор: Задериголова Михайло Михайлович
МПК: G01F 23/28
Мітки: спосіб, відстані, межі, розділу, повітря-поверхня, вимірювання, матеріалу
Формула / Реферат:
Способ измерения расстояния до границы раздела воздух - поверхность материала, согласно которому радиоволны метрового диапазона излучают в сторону границы раздела воздух - материал, отличающийся тем, что измеряют амплитуду стоячих радиоволн метрового диапазона, возникающих в результате интерференции падающего и отраженного сигналов, для чего измеряют сеточный ток генератора, плавно изменяют частоту генератора и перемещают антенну в...
Спосіб вимірювання відстані
Номер патенту: 7985
Опубліковано: 26.12.1995
Автори: Пасько Ігор Матвійович, Гринюк Ігор Євгенович, Сичиков Олександр Олександрович
МПК: G01C 3/00
Мітки: вимірювання, відстані, спосіб
Формула / Реферат:
Способ измерения расстояния, включающий направление на дистанцию модулированного светового потока, преобразование принимаемого светового потока в модулированный электрический сигнал и измерение фазового сдвига колебания электрического сигнала относительно опорного сигнала, отличающийся тем, что периодически формируют пакеты модулированного светового потока с длиной пакета, большей двойной дистанции, через промежутки времени, равные...
Спосіб вимірювання відстані лазерним дальноміром та лазерний дальномір
Номер патенту: 21305
Опубліковано: 02.12.1997
Автор: Поспєлов Леонід Андрійович
МПК: G01C 3/08
Мітки: лазерним, відстані, спосіб, дальномір, лазерний, вимірювання, дальноміром
Формула / Реферат:
1. Способ измерения расстояний лазерным дальномером, заключающийся в направленной посылке синхронизированной последовательности лазерного излучения вдоль измерительной и опорной трасс, в фотоэлектронном преобразовании излучений, гетеродинировании их с выделением на промежуточной частоте сигналов, измерении разности фаз между ними и определении по ней длины измерительной трассы, отличающийся тем, что в гетеродинирующие сигналы вводят...
Спосіб вимірювання періоду (частоти) електричного сигналу (варіанти)
Номер патенту: 21972
Опубліковано: 30.04.1998
Автор: Деражне Олександр Рафаельович
МПК: G01R 23/00
Мітки: спосіб, вимірювання, частоти, сигналу, періоду, електричного, варіанти
Формула / Реферат:
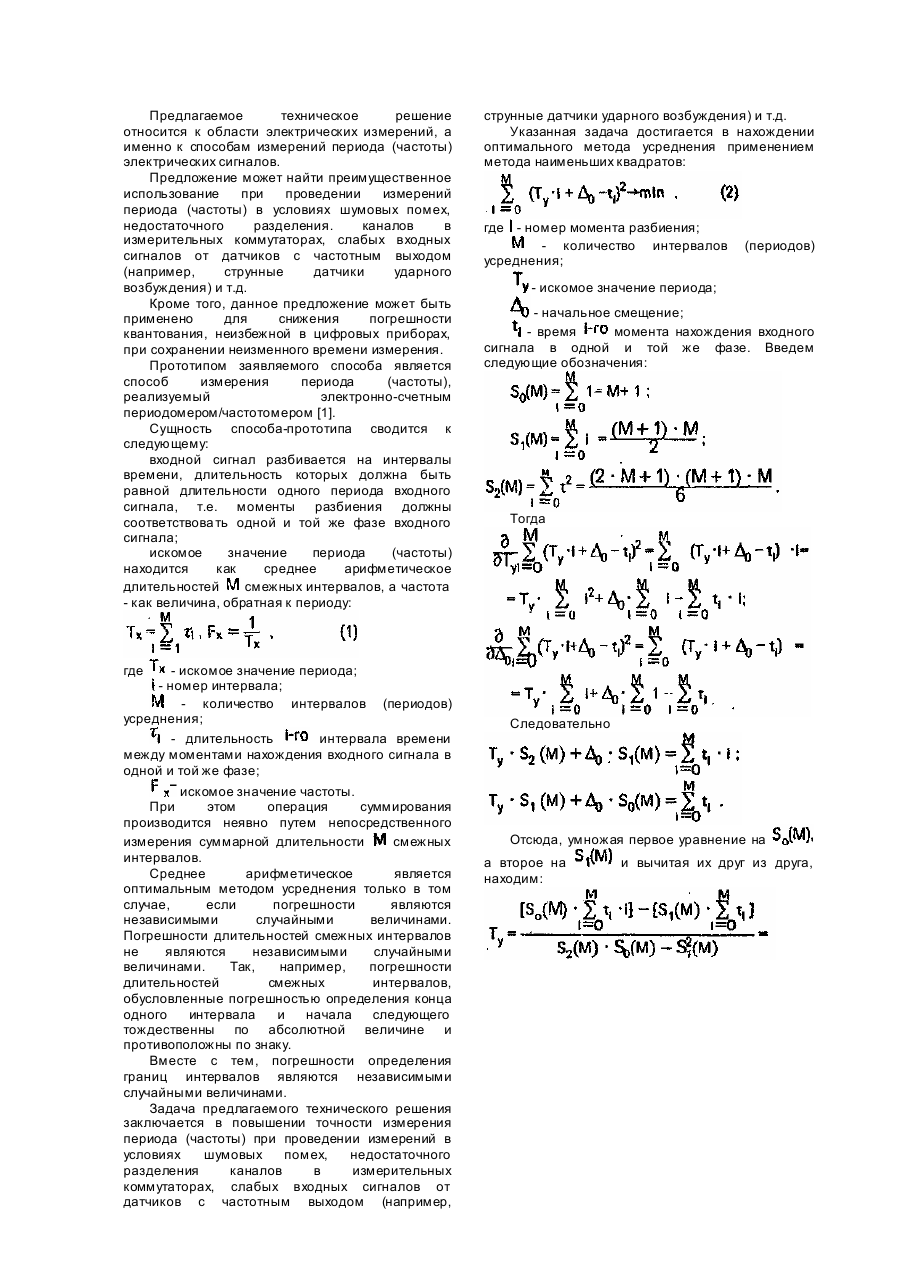
1. Способ измерения периода (частоты) электрического сигнала, включающий определение моментов нахождения входного сигнала в одной и той же фазе, отличающийся тем, что искомый период находят из выражениягде і - номер момента нахождения входного сигнала в одной и той же фазе;М - количество интервалов (периодов) усреднения;Ту - искомое значение...
Попередній патент: Пестицидна водяна емульсія
Наступний патент: Спосіб передачі даних із периферійного пристрою радіотелефону (варіанти) та пристрій для його здійснення (варіанти)
Випадковий патент: Спосіб лікування бронхітів, бронхіальної астми та простудних захворювань