Виявлювач-вимірювач доплерівських сигналів
Номер патенту: 74652
Опубліковано: 12.11.2012
Автори: Рачков Дмитро Сергійович, Атаманський Дмитро Володимирович, Леховицький Давід Ісаакович, Семеняка Андрій Вікторович
Формула / Реферат
Виявлювач-вимірювач доплерівських сигналів, який містить перший та другий ключі, об'єднані входи яких є входом пристрою, перший елемент НІ, вхід якого підключений до виходу блока керування і є керуючим входом другого ключа, а вихід є керуючим входом першого ключа, вихід другого ключа є входом першого блока затримки, вихід якого об'єднаний з виходом першого ключа і є входом другого блока затримки і другим входом перемножувача комплексних чисел, першим входом якого є вихід другого блока затримки, причому перший квадратурний канал з виходу другого блока затримки підключений до входу перемножувача комплексних чисел безпосередньо, а другий - через перший інвертор, вихід перемножувача комплексних чисел є входом блока усереднення, вихід якого підключений до входу блока обчислення фази, а також до входу блока об'єднання; вихід блока обчислення фази підключений до другого входу блока віднімання, до першого входу якого підключений вихід елемента затримки, вхід якого є також виходом блока обчислення фази, вихід блока віднімання підключений до об'єднаних входів третього і четвертого ключів, керуючі входи яких підключені до виходу блока керування: третього ключа - через другий елемент НІ, а четвертого ключа - безпосередньо, вихід четвертого ключа є входом другого інвертора, вихід якого підключений до входу п'ятого ключа, до якого також підключений вихід третього ключа, керуючим входом п'ятого ключа є вихід порогового пристрою, який є першим виходом виявлювача-вимірювача доплерівських сигналів, першим входом порогового пристрою є вихід блока об'єднання, а другим входом - вихід першого елемента пам'яті, вихід п'ятого ключа є першим входом перемножувача, другим входом якого є вихід другого елемента пам'яті, який відрізняється тим, що після перемножувача введені перший та другий блоки корекції оцінки радіальної швидкості і блок суматора-усереднювача, першими входами першого та другого блоків корекції оцінки радіальної швидкості є вихід блока оцінки фази і вихід блока затримки відповідно, а другими входами - вихід перемножувача, вихід першого та другого блока корекції оцінки радіальної швидкості є першим та другим входами блока суматора-усереднювача, а вихід цього блока - другим виходом виявлювача-вимірювача доплерівських сигналів.
Текст
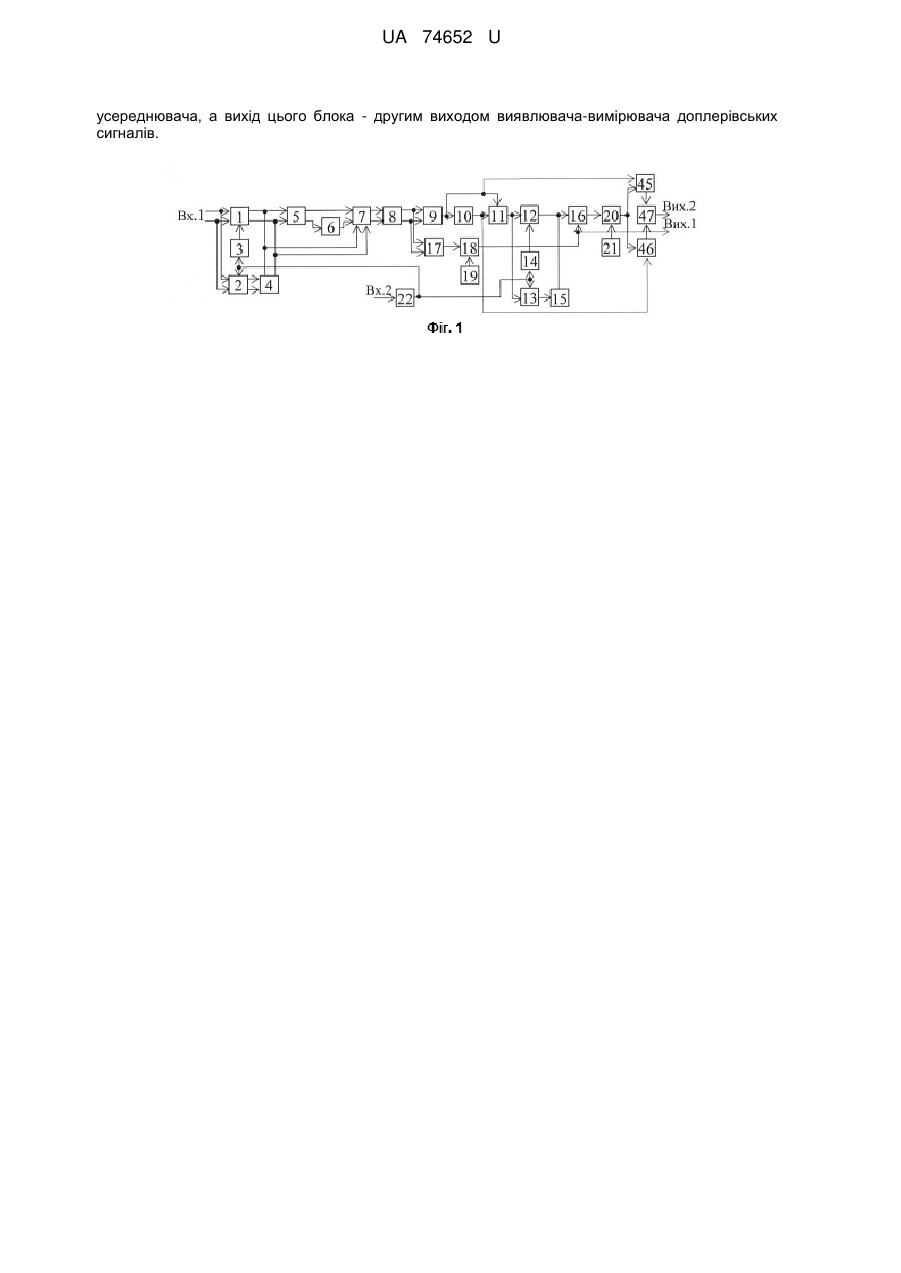
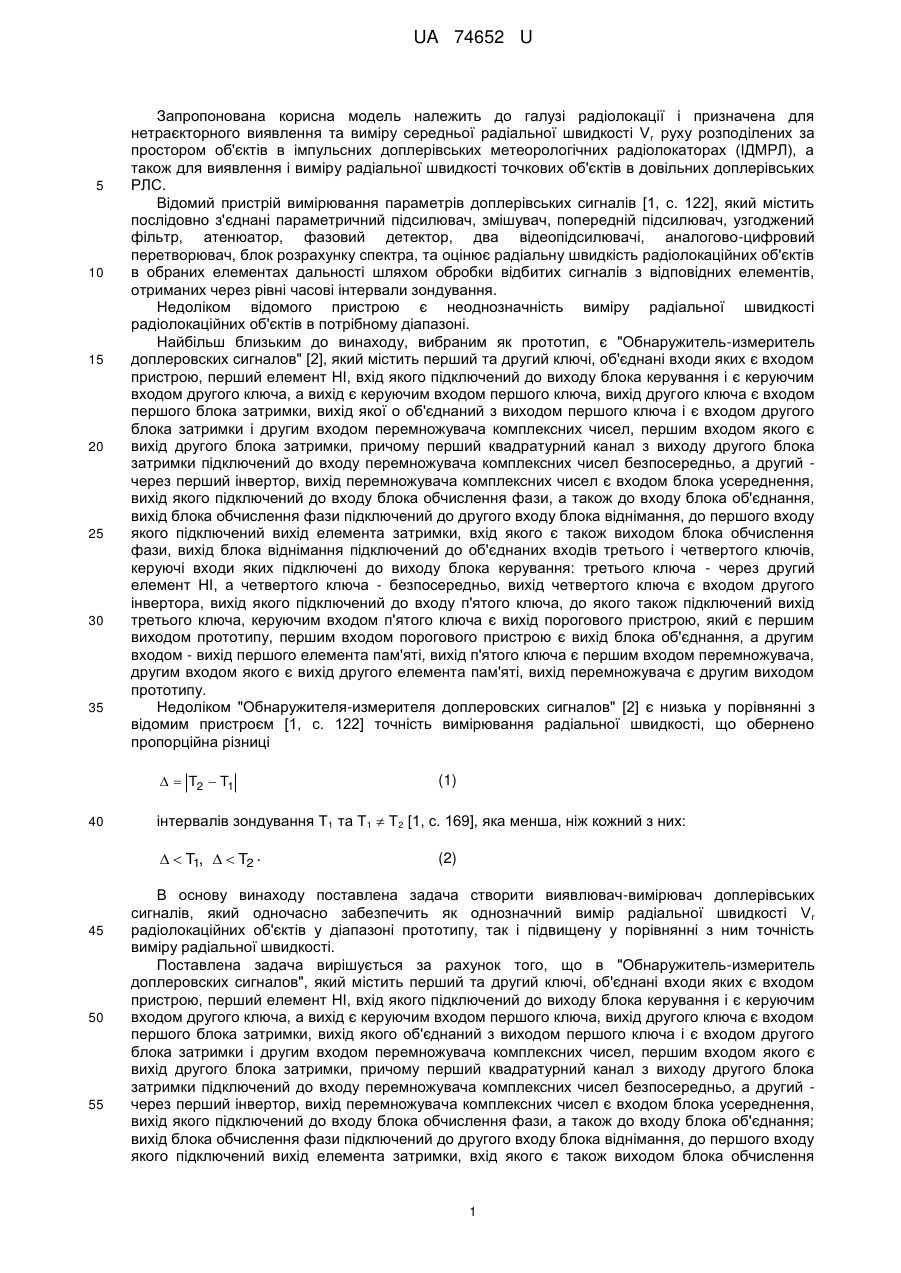
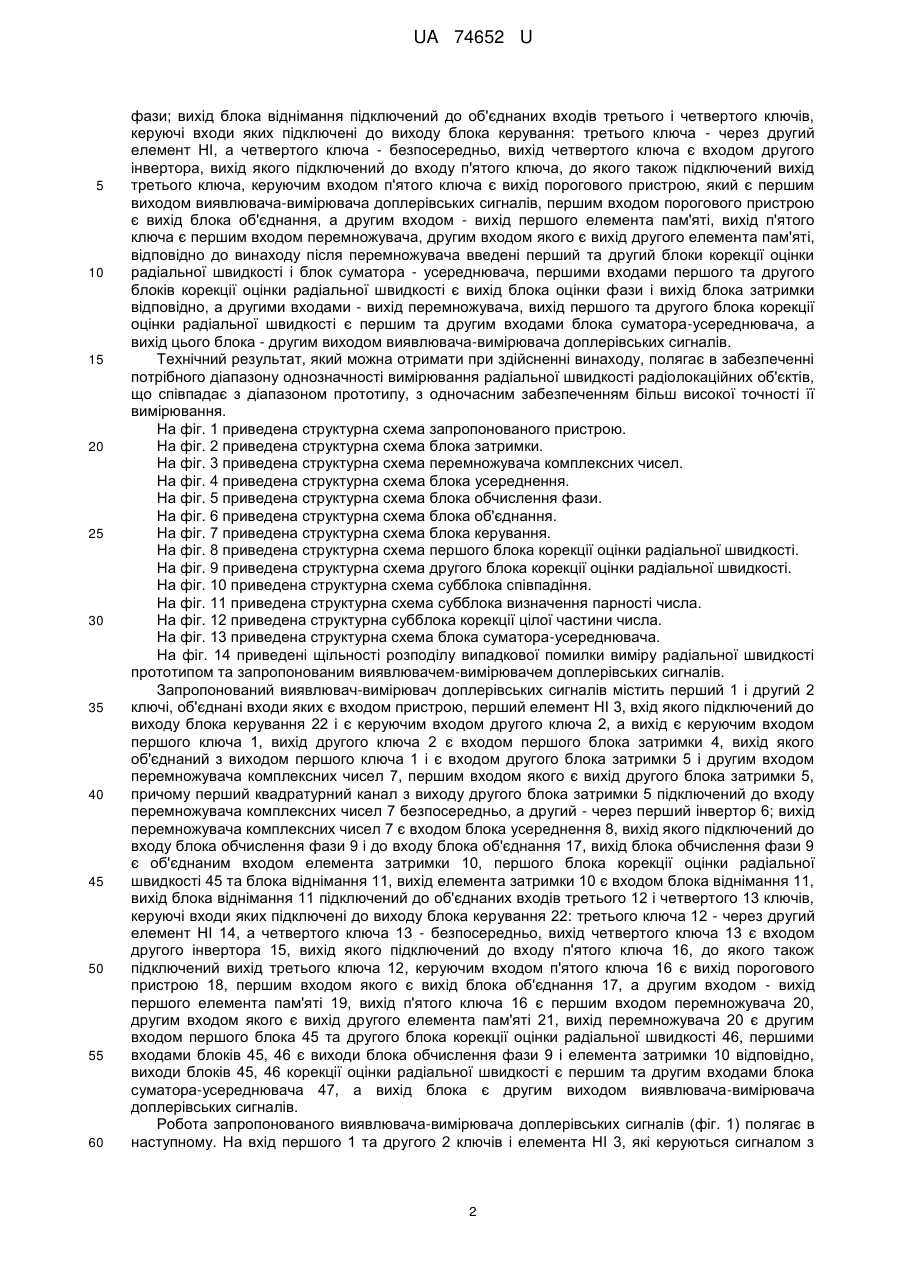
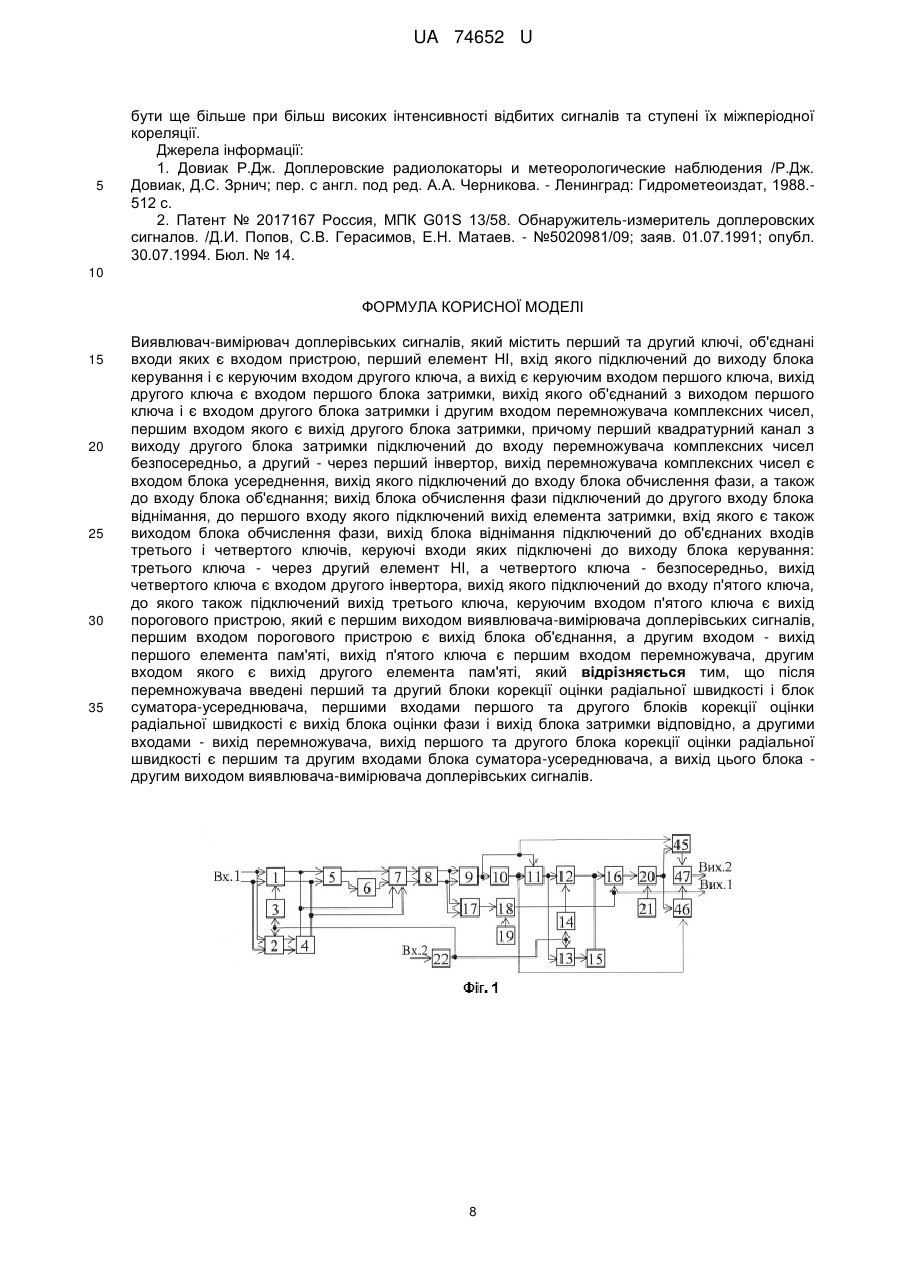
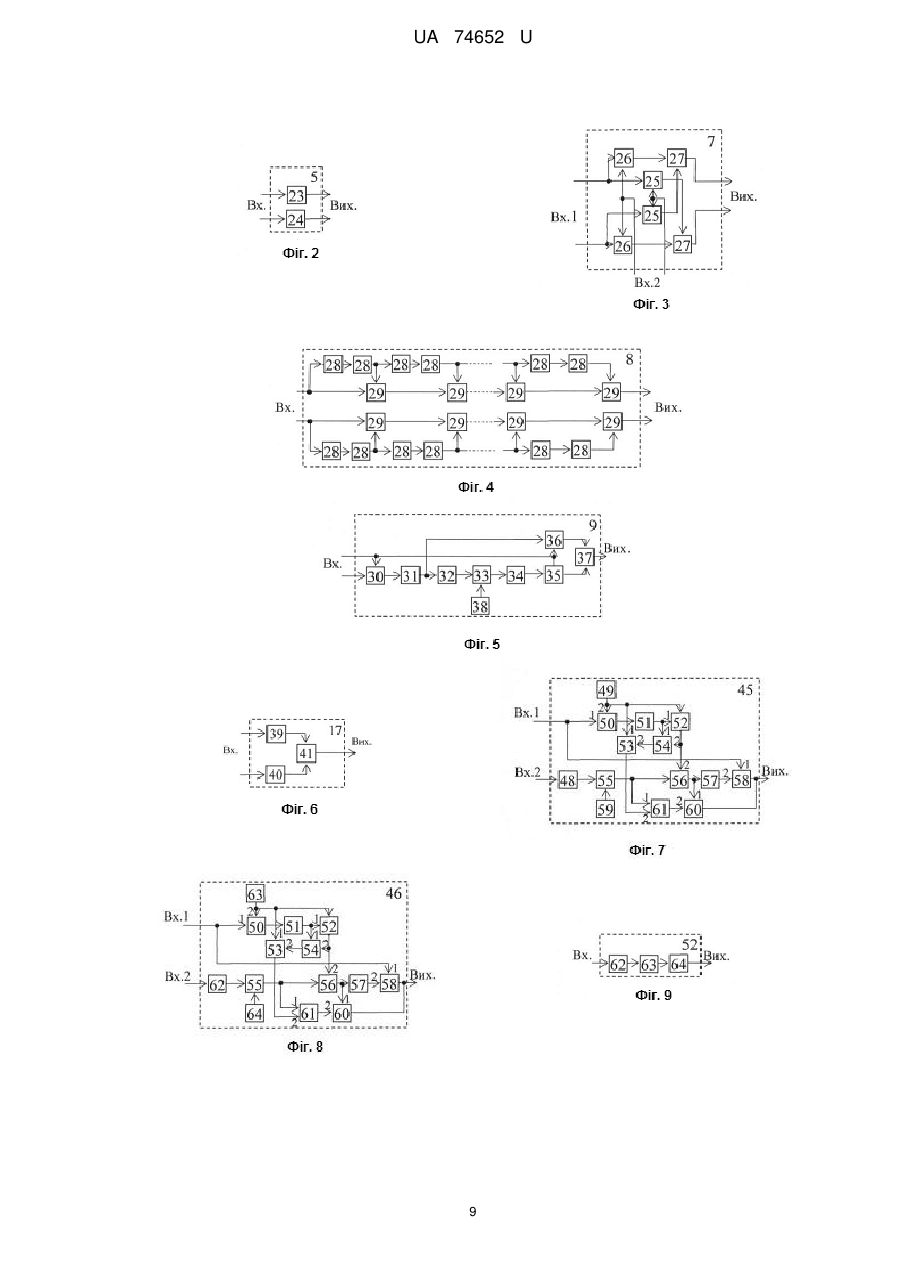
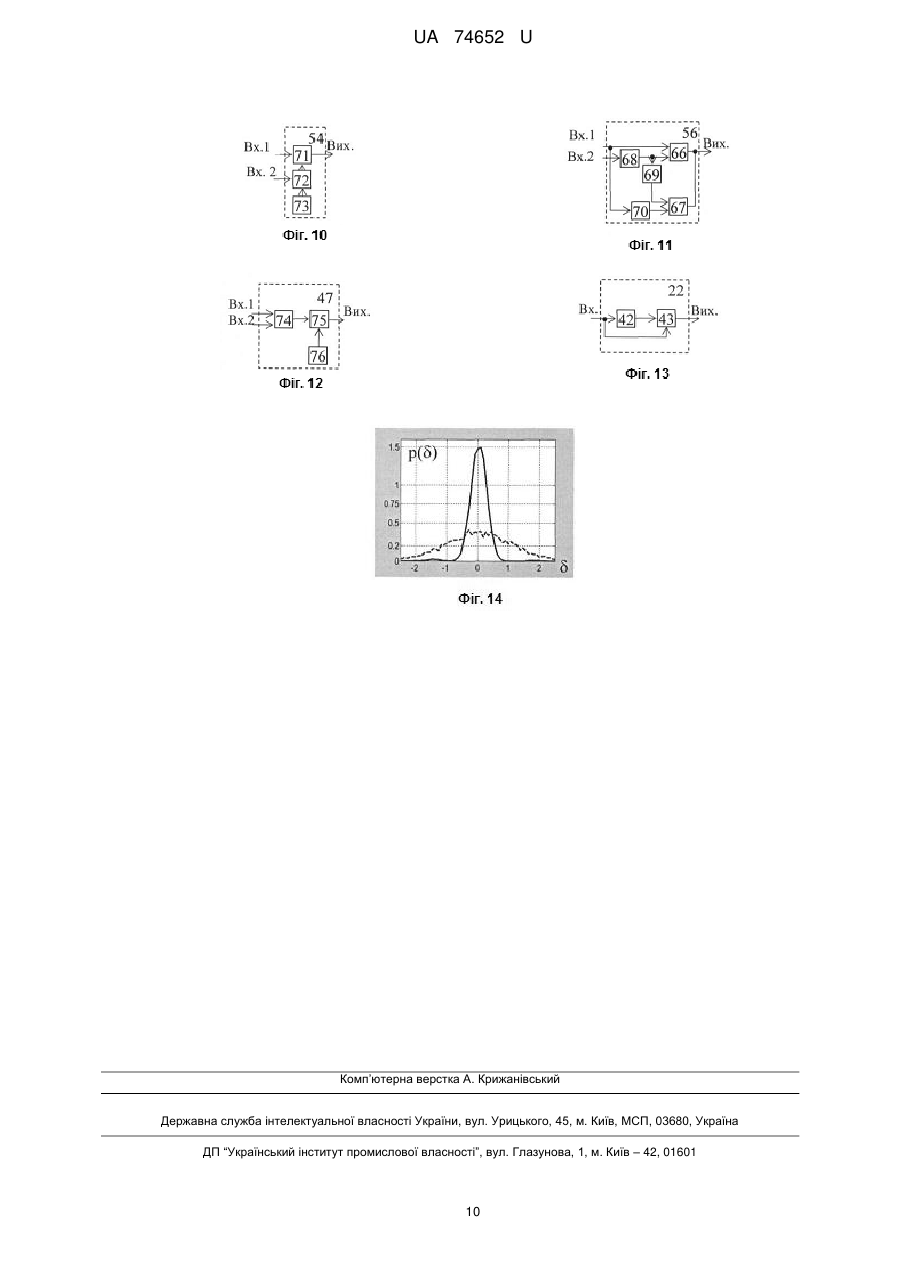
Реферат: Виявлювач-вимірювач доплерівських сигналів, який містить перший та другий ключі, об'єднані входи яких є входом пристрою, перший елемент НІ, вхід якого підключений до виходу блока керування і є керуючим входом другого ключа, а вихід є керуючим входом першого ключа, вихід другого ключа є входом першого блока затримки, вихід якого об'єднаний з виходом першого ключа і є входом другого блока затримки і другим входом перемножувача комплексних чисел, першим входом якого є вихід другого блока затримки, причому перший квадратурний канал з виходу другого блока затримки підключений до входу перемножувача комплексних чисел безпосередньо, а другий - через перший інвертор, вихід перемножувача комплексних чисел є входом блока усереднення, вихід якого підключений до входу блока обчислення фази, а також до входу блока об'єднання; вихід блока обчислення фази підключений до другого входу блока віднімання, до першого входу якого підключений вихід елемента затримки, вхід якого є також виходом блока обчислення фази, вихід блока віднімання підключений до об'єднаних входів третього і четвертого ключів, керуючі входи яких підключені до виходу блока керування: третього ключа - через другий елемент НІ, а четвертого ключа - безпосередньо, вихід четвертого ключа є входом другого інвертора, вихід якого підключений до входу п'ятого ключа, до якого також підключений вихід третього ключа, керуючим входом п'ятого ключа є вихід порогового пристрою, який є першим виходом виявлювача-вимірювача доплерівських сигналів, першим входом порогового пристрою є вихід блока об'єднання, а другим входом - вихід першого елемента пам'яті, вихід п'ятого ключа є першим входом перемножувача, другим входом якого є вихід другого елемента пам'яті. Після перемножувача введені перший та другий блоки корекції оцінки радіальної швидкості і блок суматора-усереднювача, першими входами першого та другого блоків корекції оцінки радіальної швидкості є вихід блока оцінки фази і вихід блока затримки відповідно, а другими входами - вихід перемножувача, вихід першого та другого блока корекції оцінки радіальної швидкості є першим та другим входами блока суматора UA 74652 U (12) UA 74652 U усереднювача, а вихід цього блока - другим виходом виявлювача-вимірювача доплерівських сигналів. UA 74652 U 5 10 15 20 25 30 35 Запропонована корисна модель належить до галузі радіолокації і призначена для нетраєкторного виявлення та виміру середньої радіальної швидкості V r руху розподілених за простором об'єктів в імпульсних доплерівських метеорологічних радіолокаторах (ІДМРЛ), а також для виявлення і виміру радіальної швидкості точкових об'єктів в довільних доплерівських РЛС. Відомий пристрій вимірювання параметрів доплерівських сигналів [1, с. 122], який містить послідовно з'єднані параметричний підсилювач, змішувач, попередній підсилювач, узгоджений фільтр, атенюатор, фазовий детектор, два відеопідсилювачі, аналогово-цифровий перетворювач, блок розрахунку спектра, та оцінює радіальну швидкість радіолокаційних об'єктів в обраних елементах дальності шляхом обробки відбитих сигналів з відповідних елементів, отриманих через рівні часові інтервали зондування. Недоліком відомого пристрою є неоднозначність виміру радіальної швидкості радіолокаційних об'єктів в потрібному діапазоні. Найбільш близьким до винаходу, вибраним як прототип, є "Обнаружитель-измеритель доплеровских сигналов" [2], який містить перший та другий ключі, об'єднані входи яких є входом пристрою, перший елемент НІ, вхід якого підключений до виходу блока керування і є керуючим входом другого ключа, а вихід є керуючим входом першого ключа, вихід другого ключа є входом першого блока затримки, вихід якої о об'єднаний з виходом першого ключа і є входом другого блока затримки і другим входом перемножувача комплексних чисел, першим входом якого є вихід другого блока затримки, причому перший квадратурний канал з виходу другого блока затримки підключений до входу перемножувача комплексних чисел безпосередньо, а другий через перший інвертор, вихід перемножувача комплексних чисел є входом блока усереднення, вихід якого підключений до входу блока обчислення фази, а також до входу блока об'єднання, вихід блока обчислення фази підключений до другого входу блока віднімання, до першого входу якого підключений вихід елемента затримки, вхід якого є також виходом блока обчислення фази, вихід блока віднімання підключений до об'єднаних входів третього і четвертого ключів, керуючі входи яких підключені довиходу блока керування: третього ключа - через другий елемент НІ, а четвертого ключа - безпосередньо, вихід четвертого ключа є входом другого інвертора, вихід якого підключений до входу п'ятого ключа, до якого також підключений вихід третього ключа, керуючим входом п'ятого ключа є вихід порогового пристрою, який є першим виходом прототипу, першим входом порогового пристрою є вихід блока об'єднання, а другим входом - вихід першого елемента пам'яті, вихід п'ятого ключа є першим входом перемножувача, другим входом якого є вихід другого елемента пам'яті, вихід перемножувача є другим виходом прототипу. Недоліком "Обнаружителя-измерителя доплеровских сигналов" [2] є низька у порівнянні з відомим пристроєм [1, с. 122] точність вимірювання радіальної швидкості, що обернено пропорційна різниці T2 T1 40 інтервалів зондування Т1 та T1 Т2 [1, с. 169], яка менша, ніж кожний з них: T1, T2 . 45 50 55 (1) (2) В основу винаходу поставлена задача створити виявлювач-вимірювач доплерівських сигналів, який одночасно забезпечить як однозначний вимір радіальної швидкості V r радіолокаційних об'єктів у діапазоні прототипу, так і підвищену у порівнянні з ним точність виміру радіальної швидкості. Поставлена задача вирішується за рахунок того, що в "Обнаружитель-измеритель доплеровских сигналов", який містить перший та другий ключі, об'єднані входи яких є входом пристрою, перший елемент НІ, вхід якого підключений до виходу блока керування і є керуючим входом другого ключа, а вихід є керуючим входом першого ключа, вихід другого ключа є входом першого блока затримки, вихід якого об'єднаний з виходом першого ключа і є входом другого блока затримки і другим входом перемножувача комплексних чисел, першим входом якого є вихід другого блока затримки, причому перший квадратурний канал з виходу другого блока затримки підключений до входу перемножувача комплексних чисел безпосередньо, а другий через перший інвертор, вихід перемножувача комплексних чисел є входом блока усереднення, вихід якого підключений до входу блока обчислення фази, а також до входу блока об'єднання; вихід блока обчислення фази підключений до другого входу блока віднімання, до першого входу якого підключений вихід елемента затримки, вхід якого є також виходом блока обчислення 1 UA 74652 U 5 10 15 20 25 30 35 40 45 50 55 60 фази; вихід блока віднімання підключений до об'єднаних входів третього і четвертого ключів, керуючі входи яких підключені до виходу блока керування: третього ключа - через другий елемент НІ, а четвертого ключа - безпосередньо, вихід четвертого ключа є входом другого інвертора, вихід якого підключений до входу п'ятого ключа, до якого також підключений вихід третього ключа, керуючим входом п'ятого ключа є вихід порогового пристрою, який є першим виходом виявлювача-вимірювача доплерівських сигналів, першим входом порогового пристрою є вихід блока об'єднання, а другим входом - вихід першого елемента пам'яті, вихід п'ятого ключа є першим входом перемножувача, другим входом якого є вихід другого елемента пам'яті, відповідно до винаходу після перемножувача введені перший та другий блоки корекції оцінки радіальної швидкості і блок суматора - усереднювача, першими входами першого та другого блоків корекції оцінки радіальної швидкості є вихід блока оцінки фази і вихід блока затримки відповідно, а другими входами - вихід перемножувача, вихід першого та другого блока корекції оцінки радіальної швидкості є першим та другим входами блока суматора-усереднювача, а вихід цього блока - другим виходом виявлювача-вимірювача доплерівських сигналів. Технічний результат, який можна отримати при здійсненні винаходу, полягає в забезпеченні потрібного діапазону однозначності вимірювання радіальної швидкості радіолокаційних об'єктів, що співпадає з діапазоном прототипу, з одночасним забезпеченням більш високої точності її вимірювання. На фіг. 1 приведена структурна схема запропонованого пристрою. На фіг. 2 приведена структурна схема блока затримки. На фіг. 3 приведена структурна схема перемножувача комплексних чисел. На фіг. 4 приведена структурна схема блока усереднення. На фіг. 5 приведена структурна схема блока обчислення фази. На фіг. 6 приведена структурна схема блока об'єднання. На фіг. 7 приведена структурна схема блока керування. На фіг. 8 приведена структурна схема першого блока корекції оцінки радіальної швидкості. На фіг. 9 приведена структурна схема другого блока корекції оцінки радіальної швидкості. На фіг. 10 приведена структурна схема субблока співпадіння. На фіг. 11 приведена структурна схема субблока визначення парності числа. На фіг. 12 приведена структурна субблока корекції цілої частини числа. На фіг. 13 приведена структурна схема блока суматора-усереднювача. На фіг. 14 приведені щільності розподілу випадкової помилки виміру радіальної швидкості прототипом та запропонованим виявлювачем-вимірювачем доплерівських сигналів. Запропонований виявлювач-вимірювач доплерівських сигналів містить перший 1 і другий 2 ключі, об'єднані входи яких є входом пристрою, перший елемент НІ 3, вхід якого підключений до виходу блока керування 22 і є керуючим входом другого ключа 2, а вихід є керуючим входом першого ключа 1, вихід другого ключа 2 є входом першого блока затримки 4, вихід якого об'єднаний з виходом першого ключа 1 і є входом другого блока затримки 5 і другим входом перемножувача комплексних чисел 7, першим входом якого є вихід другого блока затримки 5, причому перший квадратурний канал з виходу другого блока затримки 5 підключений до входу перемножувача комплексних чисел 7 безпосередньо, а другий - через перший інвертор 6; вихід перемножувача комплексних чисел 7 є входом блока усереднення 8, вихід якого підключений до входу блока обчислення фази 9 і до входу блока об'єднання 17, вихід блока обчислення фази 9 є об'єднаним входом елемента затримки 10, першого блока корекції оцінки радіальної швидкості 45 та блока віднімання 11, вихід елемента затримки 10 є входом блока віднімання 11, вихід блока віднімання 11 підключений до об'єднаних входів третього 12 і четвертого 13 ключів, керуючі входи яких підключені до виходу блока керування 22: третього ключа 12 - через другий елемент НІ 14, а четвертого ключа 13 - безпосередньо, вихід четвертого ключа 13 є входом другого інвертора 15, вихід якого підключений до входу п'ятого ключа 16, до якого також підключений вихід третього ключа 12, керуючим входом п'ятого ключа 16 є вихід порогового пристрою 18, першим входом якого є вихід блока об'єднання 17, а другим входом - вихід першого елемента пам'яті 19, вихід п'ятого ключа 16 є першим входом перемножувача 20, другим входом якого є вихід другого елемента пам'яті 21, вихід перемножувача 20 є другим входом першого блока 45 та другого блока корекції оцінки радіальної швидкості 46, першими входами блоків 45, 46 є виходи блока обчислення фази 9 і елемента затримки 10 відповідно, виходи блоків 45, 46 корекції оцінки радіальної швидкості є першим та другим входами блока суматора-усереднювача 47, а вихід блока є другим виходом виявлювача-вимірювача доплерівських сигналів. Робота запропонованого виявлювача-вимірювача доплерівських сигналів (фіг. 1) полягає в наступному. На вхід першого 1 та другого 2 ключів і елемента НІ 3, які керуються сигналом з 2 UA 74652 U блока управління 22, надходить послідовність квадратурних складових, що слідують із різними часовими інтервалами (Т1, T2) і відповідають послідовності комплексних відліків u(i) адитивної m суміші прийнятого сигналу і внутрішнього шуму приймача в і-му елементі розділення по дальності m-го інтервалу зондування (m-го азимутального напрямку) 5 m u(i) x (i) j y(i) , i1 N, m 1 M, , , m m (3) де j 1 - уявна одиниця; 10 15 20 x im , yim - дійсна та уявна складові комплексного числа; N - кількість елементів розділення m -го азимутального напрямку; М - розмір азимутальної пачки. При нульовому керуючому сигналі відкритий перший ключ 1, і сигнал безпосередньо проходить на входи другого блока затримки 5 (фіг. 2), який, як і блок затримки 4, містить перший 23 і другий елементи затримки 24 відповідно для сигналів першого і другого квадратурних каналів. При одиничному сигналі відкритий другий ключ 2, і сигнал затримується першим блоком затримки 4 на час T = (Т2 – Т1)/2. У такий спосіб нееквідістантна за часом послідовність m квадратурних складових u(i) сигналу перетворюється в еквідістантну з періодом Т ср = (Т1 + Т2)/2. Ця послідовність надходить на другий блок затримки 5 на час Т ср, після чого складова, що відповідає уявній частині комплексного числа (синусній складовій квадратурних каналів), додатково надходить на перший інвертор 6 для здійснення комплексного спряження. В перемножувачі комплексних чисел 7 (фіг. 3), що містить два канали І, II, кожний з яких включає перший перемножувач 25 та послідовно включені другий перемножувач 26 і суматор 27, відліки обробляються за алгоритмом: * rв ихm u(i)1 u(i)1 ( x m 1 j ym 1) ( x m j ym ) m m x m 1x m ym 1ym ( x m 1ym ym 1x m ) am j bm . 25 30 З двох виходів перемножувача комплексних чисел 7 відліки am xm1xm ym1ym та bm (xm1ym ym ym1xm ) надходять на відповідні входи блока усереднення 8, кожний з двох . . каналів якого містить к М елементів затримки 28 на час Т ср і k M/2 (M - парне число) суматорів 29. Тут здійснюється ковзне уздовж азимуту підсумовування відповідно парних і непарних відліків rв их з k суміжних елементів розділення по дальності (k=1 для точкових об'єктів і k1 m для розподілених по простору об'єктів, зокрема метеоутворень). На виході блока усереднення 8, по мірі надходження відліків, відповідно до описаного принципу роботи, по черзі формуються суми непарних та парних кореляційних моментів: ( rpT1 ) ( rpT2 ) p rв их 2m1 m 1 p rв их m 1 2m ( a(T1 ) j br T1 ) , p 1 kM / 2, , p (5) ( a(T2 ) j br T2 ) , p 1, kM / 2 , p (6) 35 де a(T1 ) (a(T2 ) ) й b(T2 ) (b(T1 ) ) - дійсна та уявна складові комплексного числа rpT1 ) (rpT2 ) ). ( ( p p p p Величини a(T1 ),b(T1 ), i a(T2 ) й b(T2 ) надходять на відповідні входи блока обчислення фази 9 p p p p (фіг. 5), у якому за допомогою дільника 30 і функціонального перетворювача 31 розраховуються величини: 40 (T ) bp 1 (T1 ) arctg , p a(T1 ) p (7) 3 UA 74652 U (T ) bp 2 ( T2 ) arctg , p a( T2 ) p (8) які мають інтервал однозначності [-/2, /2] і відповідають усередненим (Т) доплерівським набігам фаз по періодах Т 1 та Т2. Якщо при цьому a(Ti ) 0 , то відкривається другий ключ 36 і p (Ti ) через суматор 37 безпосередньо надходить на вихід блока обчислення фази 9. величина p 5 Якщо a( Ti ) 0 , то відкривається перший ключ 35 і закривається другий ключ 36. При цьому в m модульному блоці 32 утворюється модуль (Ti ) , що віднімається у від'ємнику 33 з величини , p яка надходить із елемента 38 пам'яті. Отриманій різниці в блоці 34 надається знак величини (T ) b( Ti ) . Таким чином, в блоці 9 формується скоректована оцінка фази k i , яка дорівнює p p (Ti ) , p при а(Ti ) 0 (Ti ) p k , i 1 2. , p sign(b(Ti ) ) (Ti ) , при а(Ti ) 0 p p p (9) 10 15 Величини ( Ti ) скоректованої оцінки фази, діапазон однозначного виміру яких розширений kp до [-, ], записуються в елементи поточного збереження даних 48 й 62 блоків 45 й 46 для використання при корекції оцінки радіальної швидкості. Вихід блока обчислення фази 9 підключено до першого входу блока віднімання 11 безпосередньо та до його другого входу - через елемент затримки 10. За рахунок цього на його виході з інтервалом Тср формуються різниці 1 (T1) (T2 ) k k p (10) p та 20 2 (T2 ) (T1) k k p (11) p з однаковими модулями та різними знаками: 1 2 . 25 30 (12) З виходу блока 11 значення різниць i (12) надходять до комутатору, який складається із третього 12 і четвертого 13 ключів та другого елемента 14 НІ. При нульовому вихідному сигналі блока керування 22 третій ключ 12 відкритий і величина 1 проходить на вхід п'ятого ключа 16 безпосередньо, при цьому четвертий ключ 13 закритий. При одиничному сигналі блока керування 22 третій ключ 12 закритий, а четвертий ключ 13 відкритий. В цьому випадку на п'ятий ключ 16 надходить величина 2 , інвертована другим інвертором 15. Стан п'ятого ключа 16 залежить від значення вихідного сигналу порогового пристрою 18. Його значення дорівнює нулю, якщо значення квадрату модуля ui (a(Ti ) )2 (b(Ti ) )2 p p (13) 35 величин (5), (6) на виході блока об'єднання 17 (фіг. 6), який містить два квадратори 39, 40 і суматор 41, менше порогового значення, записаного в елементі пам'яті 19. В протилежному випадку значення вихідного сигналу порогового пристрою 18 більше нуля. П'ятий ключ 16 відкрито, якщо вихідний сигнал порогового пристрою 18 відрізняється від нуля, і закрито, якщо 4 UA 74652 U його вихідний сигнал дорівнює нулю. Вихідна величина (12) п'ятого ключа 16 в перемножувачі 20 помножується на записану в елементі пам'яті 21 величину: L 5 1 c Vr(0 ), Vr(0 ) , T2 T1, 2 2 f (14) де с - швидкість світла; f - несуча частота випромінювання; Vr(0 ) - значення інтервалу однозначного вимірювання радіальної швидкості. На виході перемножувача 20 формується величина Vr L, 10 15 (15) яка і використовується як попередня оцінка Vr радіальної швидкості радіолокаційних об'єктів, інтервал однозначного вимірювання якої дорівнює значенню Vr(0 ) (14) [1, С. 169]. Ця оцінка надходить в блоки 45 та 46 корекції оцінки радіальної швидкості. В блоці корекції оцінки радіальної швидкості 45 (фіг. 7) вона надходить на перші входи дільника 50 та ключа 58. На другий вхід дільника 50 з першого елементу пам'яті 49 надходить записана в ньому величина Vr(01 ) c /( 4 f T1). 20 (16) В блоці корекції оцінки радіальної швидкості 46 (фіг. 8) вона надходить на перші входи таких же дільника 50 та ключа 58. На другий вхід цього дільника 50 з першого елементу пам'яті 63 надходить записана в ньому величина Vr(0 2 ) c /( 4 f T2 ). 25 (17) На виході дільників 50 блоків корекції оцінки радіальної швидкості (45) та (46) формуються відношення Vrc 1 Vr Vr(01 ) та Vrc 2 Vr Vr(0 2 ) вхідних величин, з яких в визначниках 51 цілої частини числа цих блоків виділяються цілі частини цих відношень: K1 floor Vr Vr(01 ) K 2 floor Vr Vr(0 2 ) , 30 35 (18) (19) де floor{x} - функція округлення до меншого цілого. Величини K1 блока корекції оцінки радіальної швидкості 45 та K 2 блока корекції оцінки радіальної швидкості 46 надходять на перший вхід субблока корекції 54 цілої частини числа (фіг. 10) та на вхід субблока 52 визначення парності числа (фіг. 9). В субблоці 52, який містить послідовно з'єднані дільник 62 вхідних величин на 2, визначник залишку ділення 63 та формувач вихідного сигналу 64, формується сигнал управління ключем 72 субблока корекції цілої частини числа 54. Ключ 72 субблока 54 відкривається у випадку, коли значення K 1 і K2 є непарними. В цьому випадку на вхід суматора 71 субблока 54 надходить одиниця, яка зберігається в елементі пам'яті 73 цього субблока. На виході субблока 54 відповідних блоків формуються величини: K1 1, K3 K1, K1 непарне ; K1 парне; (20) 40 та 5 UA 74652 U K 2 1, K4 K 2, K 2 непарне ; K 2 парне; (21) З виходу субблока 54 величина K3 блока корекції оцінки радіальної швидкості 45 та K4 блока корекції оцінки радіальної швидкості 46 надходить на перший перемножувач 53 відповідних блоків, на виході якого у блоці 45 формується добуток K 3 Vr(01 ) , а у блоці 46 - добуток 5 10 K 4 Vr(0 2 ) . Ці добутки надходять на другий вхід суматора 61 блоків корекції оцінки радіальної швидкості 45 і 46. На перший вхід суматорів 61 блоків 45 і 46 надходять величини з виходу перемножувача 55 відповідних блоків. На виході другого перемножувача 55 блока корекції оцінки радіальної швидкості 45 формується результат Vr(T1 ) L1 (T1 ), k (22) перемноження вхідної величини L1 c , що зберігається в другому елементі пам'яті 4 f T1 p 15 59, та величини ( T1 ) (7), що зберігається в елементі 48 збереження поточних даних. kp На виході перемножувача 55 блока корекції оцінки радіальної швидкості 46 формується результат Vr(T2 ) L 2 (T2 ) , k (23) перемноження вхідної величини L2 c , що зберігається в другому елементі пам'яті 4 f T2 p 20 64, та величини ( T2 ) , (7), що зберігається в елементі 62 збереження поточних даних. kp На виході суматора 61 блоків корекції оцінки радіальної швидкості 45 і 46 формуються величини Vr(ck1 ) K 3 Vr(01 ) Vr( T1 ) , Vr(ck2 ) K 4 Vr(0 2 ) Vr(T2 ) , 25 30 35 (24) (25) що відповідають скорегованим оцінкам радіальної швидкості. Величини Vr( ck1 ) (24) та Vr( ck 2 ) (25) надходять на вхід ключа 60 блоків корекції оцінки радіальної швидкості 45 і 46. Ключ 60 керується вихідним сигналом субблока співпадіння 56 (фіг. 11), який містить два елементи »І" 66, 67, два інвертори 69, 70, визначник знаку числа 68. Коли значення Vr(T1 ) 0 та K1 - парне число, або значення Vr( T1 ) 0 та K1 - непарне число, відкривається ключ 60 блока корекції оцінки радіальної швидкості 45 і на його вихід проходить величина Vr( ck1 ) . Коли значення Vr( T2 ) 0 та K2 – парне число, або значення Vr(T2 ) 0 та K2 непарне число, відкривається ключ 60 блока корекції оцінки радіальної швидкості 46 і на його вихід проходить величина Vr( ck 2 ) . В інших випадках ключ 60 закрито, а ключ 58 відкрито, і на вихід блоків корекції оцінки радіальної швидкості 45 та 46 проходить величина Vr . Таким чином на виходах блоків корекції оцінки радіальної швидкості 45 та 46 формуються величини Vr( ck1 ) та Vr( ck 2 ) , що дорівнюють: 6 UA 74652 U K V (01 ) V (T1 ) , 1 r r Vr( T1 ) 0, Vr , Vr(ck1 ) (T ) (0 ) (K1 1) Vr 1 Vr 1 , Vr( T1 ) 0, Vr , K V (0 2 ) V ( T2 ) , r 2 r Vr( T2 ) 0, Vr , Vr(ck 2 ) (T ) (0 ) (K 2 1) Vr 2 Vr 2 , Vr( T2 ) 0, Vr , 5 K1 парне число, K1 непарне число, (26) K1 непарне число, K1 парне число. K 2 парне число, K 2 непарне число, (27) K 2 непарне число, K 2 парне число. Значення Vr( ck1 ) та Vr( ck 2 ) надходять на перший та другий входи суматора 74 блока суматора-усереднювача 47 (фіг. 12). Результат підсумовування подається на перший вхід дільника 75. На його другий вхід подається величина 1/2, що зберігається в елементі пам'яті 76. На виході дільника формується остаточна оцінка радіальної швидкості 1 Vr(в) Vr(ck1 ) Vr(ck 2 ) . 2 (28) . 20 На вхід блока керування 22 (фіг. 13) з часовими інтервалами 2 Тср надходять імпульси синхронізатора передавача, які встановлюють тригер 43 цього блока у нульовий стан. Ці ж сигнали синхронізатора передавача, затримані в елементі затримки 42 на час Т ср, встановлюють тригера 43 в одиничний стан. Відповідні сигнали тригера 43 управляють роботою першого 1, другого 2, третього 12 і четвертого 13 ключів. Запропонований винахід відрізняється від прототипу новими елементами - першим та другим блоками корекції оцінки радіальної швидкості 45, 46 відповідно та блоком суматораусереднювача 47, та новими зв'язками між ними та між ними та блоками прототипу. Саме за рахунок цих нових елементів та зв'язків забезпечуються як однозначний вимір радіальної швидкості Vr радіолокаційних об'єктів у діапазоні прототипу, так і підвищена у порівнянні з ним точність виміру радіальної швидкості, тобто досягається рішення поставленої задачі. Дійсно, інтервал однозначності виміру радіальної швидкості в запропонованому пристрої визначається інтервалом однозначності перших складових в (24), (25), для яких справедливі 25 нерівності K 3 Vr(01 ) Vr , K 4 Vr(0 2 ) Vr . Тому цей інтервал однозначності повністю співпадає з відповідним інтервалом значень Vr (15) прототипу. В той же час помилка виміру радіальної швидкості запропонованого винаходу менше, ніж аналогічна помилка прототипу, оскільки за рахунок використання нових елементів та зв'язків у відповідності з (16), (17) вона обернено пропорційна не різниці T2 T1 (1) інтервалів 10 15 30 35 40 T (T1 T2 ) / 2 зондування, а їх середньому значенню cp . Оскільки у відповідності з (2) Т 1 > , Т2 > , то і Тср > , що і забезпечує меншу помилку вимірювання радіальної швидкості у запропонованому пристрої у порівнянні з прототипом. При заданих параметрах зондування виграш в точності вимірювання радіальної швидкості залежить від відносної (відносно власного шуму приймача) інтенсивності відбитих сигналів, форми та ширини їх спектру (коефіцієнту міжперіодної кореляції). Як приклад, на фіг. 14 наведені отримані шляхом математичного моделювання щільності розподілу р() помилок вимірювання радіальної швидкості прототипу (штрихова крива) та запропонованого пристрою (суцільна крива) в умовах, коли відносна інтенсивність відбитих сигналів дорівнює =20 дБ, їх спектр та кореляційна функція - гаусові, коефіцієнт міжперіодної кореляції (Тср) відліків, розділених часовим інтервалом Т ср = 2 мс, дорівнює 0.8, Т 1=2.109 мс, Т2=1.89мс, T2 T1 0.219 мс, (T1 , T2 ),k 2, c 5.32 см. f Видно, що на однаковому рівні 0,5 від відповідних максимумів ширина щільності розподілу р() помилок у запропонованому пристрої втричі менше, ніж у прототипі. За рахунок цього у наведеному прикладі помилки вимірювання радіальної швидкості у запропонованій корисній моделі втричі менше у порівнянні з відповідними помилками прототипу. Виграш в точності може 7 UA 74652 U 5 бути ще більше при більш високих інтенсивності відбитих сигналів та ступені їх міжперіодної кореляції. Джерела інформації: 1. Довиак Р.Дж. Доплеровские радиолокаторы и метеорологические наблюдения /Р.Дж. Довиак, Д.С. Зрнич; пер. с англ. под ред. А.А. Черникова. - Ленинград: Гидрометеоиздат, 1988.512 с. 2. Патент № 2017167 Россия, МПК G01S 13/58. Обнаружитель-измеритель доплеровских сигналов. /Д.И. Попов, С.В. Герасимов, Е.Н. Матаев. - №5020981/09; заяв. 01.07.1991; опубл. 30.07.1994. Бюл. № 14. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 Виявлювач-вимірювач доплерівських сигналів, який містить перший та другий ключі, об'єднані входи яких є входом пристрою, перший елемент НІ, вхід якого підключений до виходу блока керування і є керуючим входом другого ключа, а вихід є керуючим входом першого ключа, вихід другого ключа є входом першого блока затримки, вихід якого об'єднаний з виходом першого ключа і є входом другого блока затримки і другим входом перемножувача комплексних чисел, першим входом якого є вихід другого блока затримки, причому перший квадратурний канал з виходу другого блока затримки підключений до входу перемножувача комплексних чисел безпосередньо, а другий - через перший інвертор, вихід перемножувача комплексних чисел є входом блока усереднення, вихід якого підключений до входу блока обчислення фази, а також до входу блока об'єднання; вихід блока обчислення фази підключений до другого входу блока віднімання, до першого входу якого підключений вихід елемента затримки, вхід якого є також виходом блока обчислення фази, вихід блока віднімання підключений до об'єднаних входів третього і четвертого ключів, керуючі входи яких підключені до виходу блока керування: третього ключа - через другий елемент НІ, а четвертого ключа - безпосередньо, вихід четвертого ключа є входом другого інвертора, вихід якого підключений до входу п'ятого ключа, до якого також підключений вихід третього ключа, керуючим входом п'ятого ключа є вихід порогового пристрою, який є першим виходом виявлювача-вимірювача доплерівських сигналів, першим входом порогового пристрою є вихід блока об'єднання, а другим входом - вихід першого елемента пам'яті, вихід п'ятого ключа є першим входом перемножувача, другим входом якого є вихід другого елемента пам'яті, який відрізняється тим, що після перемножувача введені перший та другий блоки корекції оцінки радіальної швидкості і блок суматора-усереднювача, першими входами першого та другого блоків корекції оцінки радіальної швидкості є вихід блока оцінки фази і вихід блока затримки відповідно, а другими входами - вихід перемножувача, вихід першого та другого блока корекції оцінки радіальної швидкості є першим та другим входами блока суматора-усереднювача, а вихід цього блока другим виходом виявлювача-вимірювача доплерівських сигналів. 8 UA 74652 U 9 UA 74652 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for detection and measurement of doppler signals
Автори англійськоюLekhovytskyi David Isaakovych, Atamanskyi Dmytro Volodymyrovych, Rachkov Dmytro Serhiiovych, Semeniaka Andrii Viktorovych
Назва патенту російськоюВыявитель-измеритель допплеровских сигналов
Автори російськоюЛеховицкий Давид Исаакович, Атаманский Дмитрий Владимирович, Рачков Дмитрий Сергеевич, Семеняка Андрей Викторович
МПК / Мітки
МПК: G01S 13/58
Мітки: доплерівських, сигналів, виявлювач-вимірювач
Код посилання
<a href="https://ua.patents.su/12-74652-viyavlyuvach-vimiryuvach-doplerivskikh-signaliv.html" target="_blank" rel="follow" title="База патентів України">Виявлювач-вимірювач доплерівських сигналів</a>
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти
Номер патенту: 48459
Опубліковано: 15.08.2002
Автори: Соченко Петро Степанович, Пазюк Олексій Вячеславович, Зеленков Олександр Аврамович
МПК: G01R 27/02, G01R 27/00
Мітки: потужності, індуктивності, реактивного, частоти, опору, активного, ємності, вимірювач, повного
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти, який містить послідовно з'єднані навантаження, еталонний резистор та перший блок вимірювань, в який входять перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки ділення, перший, другий, третій та четвертий блоки множення та перший реєстратор, причому перший вивід навантаження з'єднаний з...
Вимірювач потужності
Номер патенту: 32240
Опубліковано: 15.12.2000
Автори: Соченко Петро Степанович, Зеленков Олександр Аврамович
МПК: G01R 21/00
Мітки: потужності, вимірювач
Текст:
...з відповідники входами суматора, вихід якого підключений через перший перетворювач вимірювального сигналу до першого входу регістратора у відповідності з винаходом введені другий та третій перетворювачі, перший та другий блоки множення і блок ділення, причому перший та другий входи другого перетворювача з'єднані з першим і другим виводами еталонного резистора відповідно, а вихід підключений до першого входу першого блоку множення, другий та...
Пристрій поділу сигналів
Номер патенту: 49391
Опубліковано: 26.04.2010
Автори: Божко Олександр Євгенович, Тертишний Іван Сергійович, Мягкохліб Костянтин Борисович, Личкатий Євген Олександрович
МПК: G06G 7/16
Мітки: пристрій, сигналів, поділу
Формула / Реферат:
Пристрій поділу сигналів, який містить блок віднімання, перший вхід якого є першим входом пристрою, а вихід через підсилювач і перший блок множення з'єднаний з першим входом другого блока множення і є виходом пристрою, другий блок множення, вихід якого з'єднаний із другим входом блока віднімання, який відрізняється тим, що в нього додатково введені другий блок віднімання, перший вхід якого є другим входом пристрою, а другий вхід через...
Вимірювач потужності, повного, активного та реактивного опорів
Номер патенту: 36685
Опубліковано: 16.04.2001
Автори: Зеленков Олександр Аврамович, Соченко Петро Степанович, Пазюк Олексій Вячеславович
МПК: G01R 27/02, G01R 27/16
Мітки: повного, потужності, реактивного, вимірювач, опорів, активного
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опорів який містить послідовно з'єднані навантаження та еталонний резистор, перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки множення, перший блок ділення та реєстратор, причому перший вивід навантаження з'єднаний з шиною живлення і першим входом першого квадратора, другий вхід якого з'єднаний з першим входом третього квадратора...
Конвеєрний криптографічний обчислювач
Номер патенту: 55213
Опубліковано: 10.12.2010
Автори: Корченко Олександр Григорович, Гнатюк Сергій Олександрович, Кінзерявий Василь Миколайович, Паціра Євгенія Вікторівна, Панасюк Андрій Леонідович
МПК: H04L 9/06
Мітки: криптографічний, конвеєрний, обчислювач
Формула / Реферат:
1. Конвеєрний криптографічний обчислювач, що містить модуль початкової обробки, модулів шифрування та модуль формування результату, який відрізняється тим, що додатково введено синхронізуючу шину (СШ), 128-бітну вхідну шину даних, (64n)-бітну вхідну шину ключа та 128-бітну вихідну шину даних, причому вхідна шина ключа підключена до першого входу модуля початкової обробки,...
Попередній патент: Колона термоізольованих труб
Наступний патент: Механізм підвищення стійкості сідельного автопоїзда під час руху на поворотах дороги
Випадковий патент: Антибактеріальний засіб