Відмовостійка система орієнтування датчиків повітряних параметрів
Номер патенту: 78838
Опубліковано: 10.04.2013
Автори: Гордін Олександр Григорович, Зекіна Вікторія Олегівна
Формула / Реферат
1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата за допомогою двовісних карданових підвісів з додатковими скобами корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені два - перший і другий - одновісних гіроскопічних стабілізатори, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зовнішню раму та по одному датчику кутів на осях підвісу рам, а на внутрішній рамі першого двовісного карданова підвісу закріплений корпус приймача повітряного тиску, на внутрішній рамі другого двовісного карданова підвісу закріплений корпус датчика температури загальмованого потоку повітря, дві індукційні сельсинні системи - перша в каналі кута атаки, друга в каналі кута ковзання, кожна з яких включає по три - перший, другий та третій, четвертий, п'ятий та шостий відповідно - сельсини з електрично зв'язаними обмотками роторів, чотири ідентичні слідкуючі системи - перша та друга в каналі кута атаки, третя та четверта в каналі кута ковзання - кожна з яких вміщує підсилювач-перетворювач, електродвигун, механічний редуктор, також введені обчислювальний пристрій формування істинних значень кутів атаки і ковзання, перший та другий фільтри нижніх частот, перший та другий перетворювачі інформації, перший та другий компаратори, обчислювальний пристрій каналу кута атаки та перший підсилювач-перетворювач, третій та четвертий фільтри нижніх частот, третій та четвертий перетворювачі інформації, третій та четвертий компаратори, обчислювальний пристрій каналу кута ковзання та другий підсилювач-перетворювач, причому вісь підвісу платформи першого одновісного гіроскопічного стабілізатора механічно зв'язана з ротором першого сельсина першої індукційної сельсинної системи, вісь підвісу внутрішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором другого сельсина першої індукційної сельсинної системи, вісь підвісу внутрішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором третього сельсина першої індукційної сельсинної системи, вісь підвісу платформи другого одновісного гіроскопічного стабілізатора механічно зв'язана з ротором четвертого сельсина другої індукційної сельсинної системи, вісь підвісу зовнішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором п'ятого сельсина другої індукційної сельсинної системи, вісь підвісу зовнішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором шостого сельсина другої індукційної сельсинної системи, відповідні вихідні точки обмоток роторів першого, другого, третього сельсинів першої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, відповідні вихідні точки обмоток роторів четвертого, п'ятого, шостого сельсинів другої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, на обмотки статорів першого сельсина першої індукційної сельсинної системи та четвертого сельсина другої індукційної сельсинної системи подана напруга з джерела живлення, обмотка статора другого сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача - перетворювача першої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора першої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу внутрішньої рами першого двовісного карданова підвісу, обмотка статора третього сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача другої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора другої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу внутрішньої рами другого двовісного карданова підвісу, обмотка статора п'ятого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача третьої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора третьої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу зовнішньої рами першого двовісного карданова підвісу, обмотка статора шостого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача четвертої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора четвертої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу зовнішньої рами другого двовісного карданова підвісу, перший вихід обчислювального пристрою формування істинних значень кутів атаки та ковзання з'єднаний з першим входом першого компаратора, другий вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з першим входом другого компаратора, третій вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з першим входом четвертого компаратора, четвертий вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з другим входом третього компаратора, вихід датчика кута на осі підвісу внутрішньої рами першого двовісного карданова підвісу поданий на вхід першого фільтра нижніх частот, вихід якого з'єднаний з входом першого перетворювача інформації, а його вихід сполучений з другим входом першого компаратора, вихід його поданий на перший вхід обчислювального пристрою каналу кута атаки, вихід датчика кута на осі підвісу внутрішньої рами другого двовісного карданова підвісу поданий на вхід другого фільтра нижніх частот, вихід якого з'єднаний з входом другого перетворювача інформації, а його вихід сполучений з другим входом другого компаратора, вихід другого компаратора поданий на другий вхід обчислювального пристрою каналу кута атаки, а його вихід з'єднаний з входом першого підсилювача-перетворювача, вихід якого сполучений з входом датчика моменту системи орієнтації платформи першого одновісного гіроскопічного стабілізатора, вихід датчика кута на осі підвісу зовнішньої рами першого двовісного карданова підвісу поданий на вхід третього фільтра нижніх частот, вихід якого з'єднаний з входом третього перетворювача інформації, а його вихід сполучений з другим входом четвертого компаратора, вихід датчика кута на осі підвісу зовнішньої рами другого карданова підвісу поданий на вхід четвертого фільтра нижніх частот, вихід якого з'єднаний з входом четвертого перетворювача інформації, а його вихід сполучений з першим входом третього компаратора, вихід третього компаратора з'єднаний з другим входом обчислювального пристрою каналу кута ковзання, вихід четвертого компаратора сполучений з першим входом обчислювального пристрою каналу кута ковзання, а його вихід поданий на вхід другого підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту системи орієнтації платформи другого одновісного гіроскопічного стабілізатора.
2. Відмовостійка система орієнтування датчиків повітряних параметрів відповідно за п. 1, яка відрізняється тим, що входи обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднані з виходами інерціальної навігаційної системи.
Текст
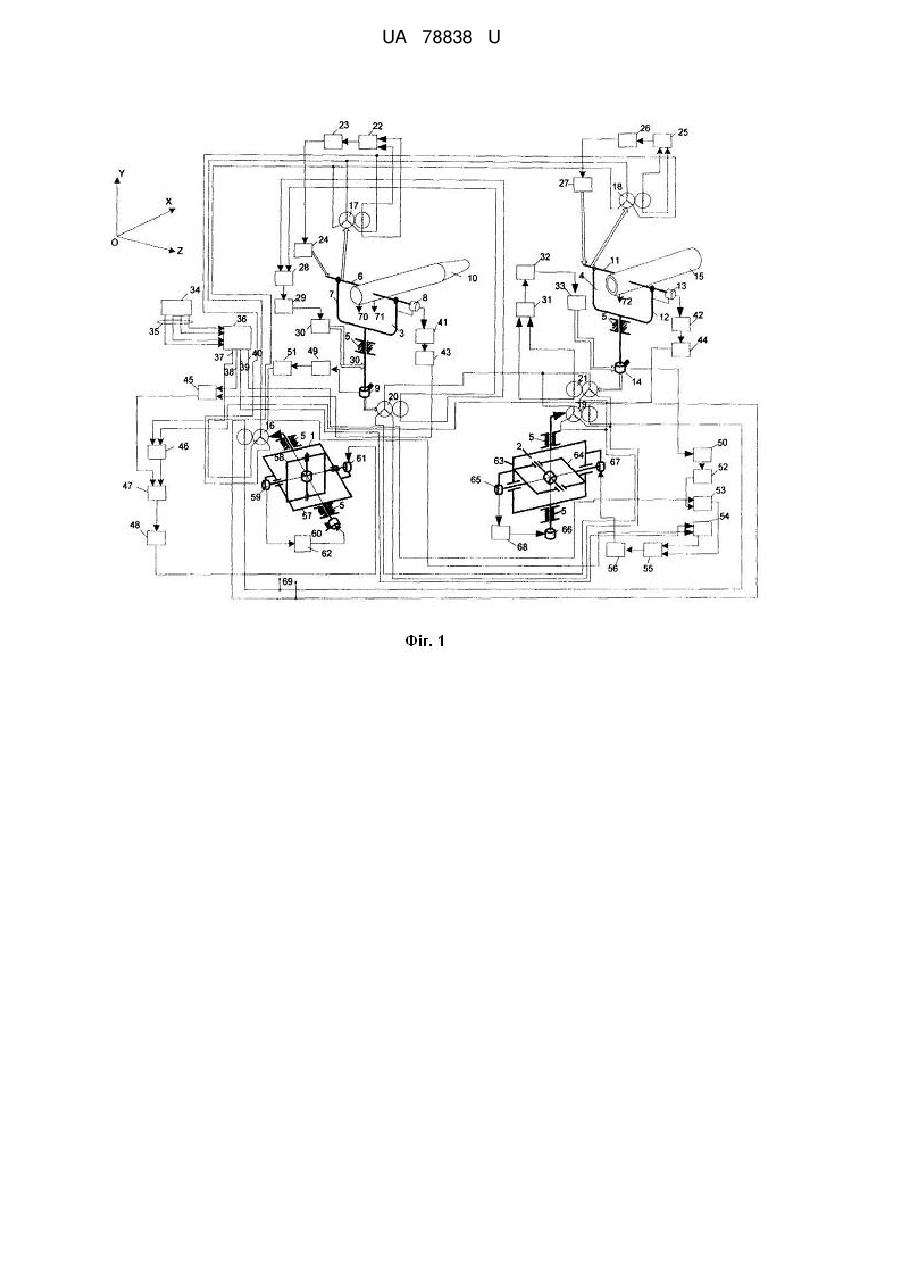
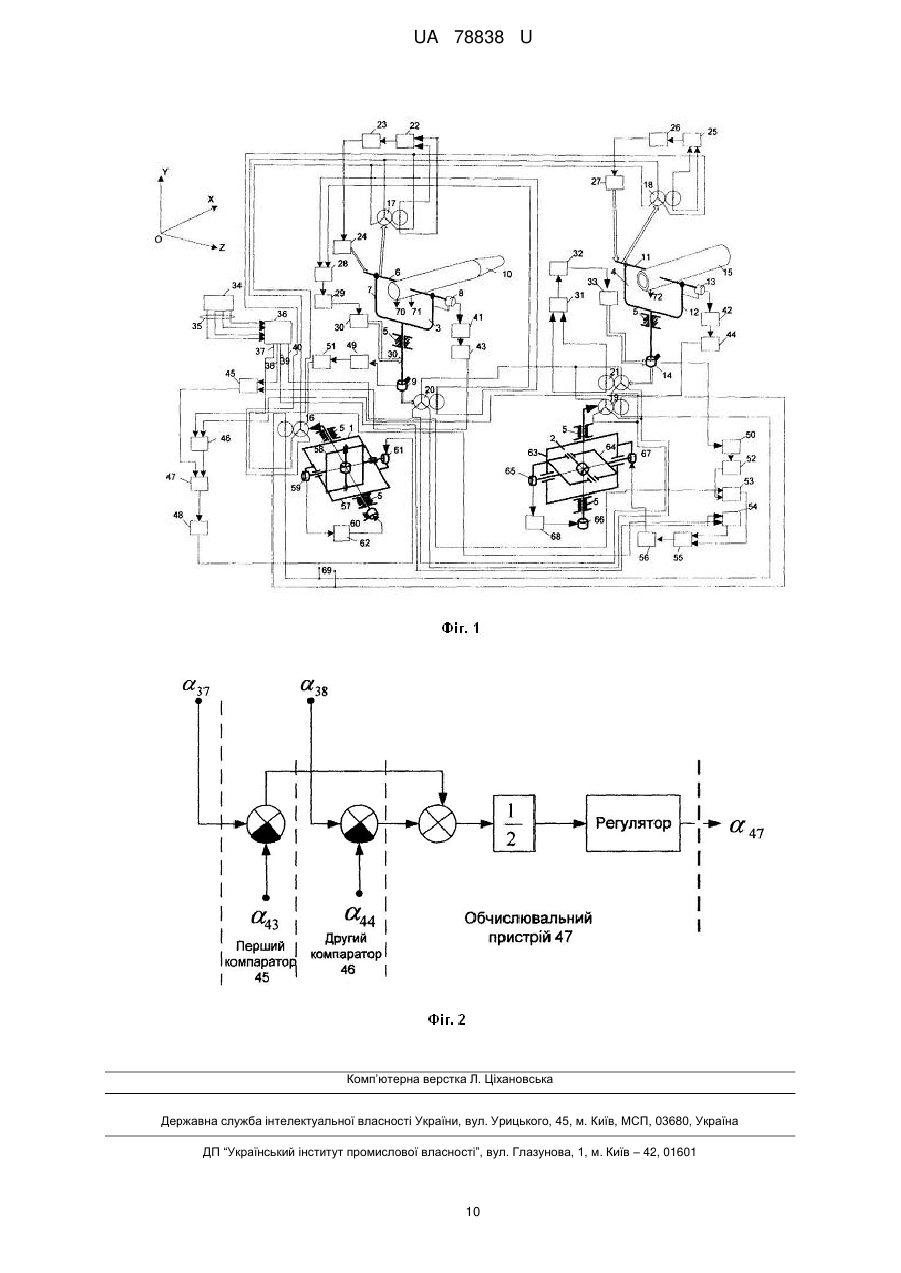
Реферат: UA 78838 U UA 78838 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки і може бути використана в аерометричних системах та системах повітряних сигналів високоманеврених пілотованих та безпілотних літальних апаратів. Як аналог вибрана система орієнтування приймача повітряного тиску, яка вміщує приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, та датчик температури загальмованого потоку повітря, який має електричний вихід [Боднер В.А. Авиационные приборы. - М.: Машиностроение, 1969. - С. 210-216, 326-330. Браславский Д.А., Логунов С.С., Пельпор Д.С. Авиационные приборы и автоматы. - М.: Машиностроение, 1978. - С. 180-182, 217-222. Браславский Д.А., Логунов С.С., Пельпор Д.С. Авиационные приборы. - М.: Машиностроение, 1964. - С. 186-187. Браславский Д.А. Приборы и датчики летательных аппаратов. - М.: Машиностроение, 1964. - С. 293, 306, 307, 318-322]. Недоліками цієї системи є значні похибки вимірювання температури загальмованого потоку повітря та статичного і повного повітряного тиску при польоті з великими кутами атаки і ковзання, адже кути атаки і ковзання високоманевреного рухомого об'єкта можуть змінюватися в межах ±80°. Відома найбільш близька та вибрана як прототип система [Заявка № u201109314 України. МПК G01P 5/14, G01P 13/00, рішення про видачу патенту від 16.11.2011], що містить закріплені на поверхні літального апарату корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по цьому датчику кутів на осях підвісу скоби внутрішньої та зовнішньої рами, а на внутрішній рамі першого двовісного карданова підвісу закріплений корпус приймача повітряного тиску, а на внутрішній рамі другого карданова підвісу закріплений корпус датчика температури загальмованого потоку повітря, дві індукційні сельсинні системи, кожна з яких включає по три сельсини з електрично зв'язаними обмотками роторів, чотири ідентичні слідкуючі системи, кожна з яких вміщує підсилювач-перетворювач, електродвигун, два механічні редуктори та пристрій формування вихідного сигналу, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні сигнали на осях підвісу флюгерних датчиків, перший, другий та третій фільтри нижніх частот, перший та другий компаратори, обчислювальний пристрій каналу кута атаки та перший підсилювач-перетворювач, четвертий, п'ятий та шостий фільтри нижніх частот, третій та четвертий компаратори, обчислювальний пристрій каналу кута ковзання та другий підсилювачперетворювач, блок формування електричних сигналів для кутів атаки та ковзання. Недоліками цієї системи є використання жорстких тяг, також значні похибки вимірювання температури загальмованого потоку повітря та статичного і повного повітряного тиску при польоті з великими кутами атаки і ковзання, адже кути атаки і ковзання високоманевреного рухомого об'єкта можуть змінюватися в межах ±80°. Задачею корисної моделі є підвищення точності вимірювання повного та статичного тиску та температури загальмованого потоку повітря за рахунок введення системи орієнтування приймача повітряного тиску та датчика температури загальмованого потоку повітря, а також забезпечення відмовостійкості шляхом реалізації схеми двоканальної системи управління положення датчиків повітряних параметрів з використанням інформації інерціальної навігаційної системи. Поставлена задача вирішується тим, що в систему орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата за допомогою двовісних карданових підвісів з додатковими скобами корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, згідно з корисною моделлю введені два перший і другий - одновісних гіроскопічних стабілізатори, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зовнішню раму та по одному датчику кутів на осях підвісу рам, а на внутрішній рамі першого двовісного карданова підвісу закріплений корпус приймача повітряного тиску, на внутрішній рамі другого двовісного карданова підвісу закріплений корпус датчика температури загальмованого потоку повітря, дві індукційні сельсинні системи - перша в каналі кута атаки, друга в каналі кута ковзання, кожна з яких включає по три - перший, другий та третій, четвертий, п'ятий та шостий відповідно сельсини з електрично зв'язаними обмотками роторів, чотири ідентичні слідкуючі системи перша та друга в каналі кута атаки, третя та четверта в каналі кута ковзання - кожна з яких вміщує підсилювач-перетворювач, електродвигун, механічний редуктор, також введені обчислювальний пристрій формування істинних значень кутів атаки і ковзання, перший та другий фільтри нижніх частот, перший та другий перетворювачі інформації, перший та другий 1 UA 78838 U 5 10 15 20 25 30 35 40 45 50 55 60 компаратори, обчислювальний пристрій каналу кута атаки та перший підсилювачперетворювач, третій та четвертий фільтри нижніх частот, третій та четвертий перетворювачі інформації, третій та четвертий компаратори, обчислювальний пристрій каналу кута ковзання та другий підсилювач-перетворювач, причому вісь підвісу платформи першого одновісного гіроскопічного стабілізатора механічно зв'язана з ротором першого сельсина першої індукційної сельсинної системи, вісь підвісу внутрішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором другого сельсина першої індукційної сельсинної системи, вісь підвісу внутрішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором третього сельсина першої індукційної сельсинної системи, вісь підвісу платформи другого одновісного гіроскопічного стабілізатора механічно зв'язана з ротором четвертого сельсина другої індукційної сельсинної системи, вісь підвісу зовнішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором п'ятого сельсина другої індукційної сельсинної системи, вісь підвісу зовнішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором шостого сельсина другої індукційної сельсинної системи, відповідні вихідні точки обмоток роторів першого, другого, третього сельсинів першої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, відповідні вихідні точки обмоток роторів четвертого, п'ятого, шостого сельсинів другої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, на обмотки статорів першого сельсина першої індукційної сельсинної системи та четвертого сельсина другої індукційної сельсинної системи подана напруга з джерела живлення, обмотка статора другого сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача першої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора першої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу внутрішньої рами першого двовісного карданова підвісу, обмотка статора третього сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача другої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора другої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу внутрішньої рами другого двовісного карданова підвісу, обмотка статора п'ятого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювачаперетворювача третьої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора третьої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу зовнішньої рами першого двовісного карданова підвісу, обмотка статора шостого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача четвертої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора четвертої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу зовнішньої рами другого двовісного карданова підвісу, перший вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з першим входом першого компаратора, другий вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з першим входом другого компаратора, третій вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з першим входом четвертого компаратора, четвертий вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з другим входом третього компаратора, вихіддатчика кута на осі підвісу внутрішньої рами першого двовісного карданова підвісу поданий на вхід першого фільтра нижніх частот, вихід якого з'єднаний з входом першого перетворювача інформації, а його вихід сполучений з другим входом першого компаратора, вихід його поданий на перший вхід обчислювального пристрою каналу кута атаки, вихід датчика кута на осі підвісу внутрішньої рами другого двовісного карданова підвісу поданий на вхід другого фільтра нижніх частот, вихід якого з'єднаний з входом другого перетворювача інформації, а його вихід сполучений з другим входом другого компаратора, вихід другого компаратора поданий на другий вхід обчислювального пристрою каналу кута атаки, а його вихід з'єднаний з входом першого підсилювача-перетворювача, вихід якого сполучений з входом датчика моменту системи орієнтації платформи першого одновісного гіроскопічного стабілізатора, вихід датчика кута на осі підвісу зовнішньої рами першого двовісного карданова підвісу поданий на вхід третього фільтра нижніх частот, вихід якого з'єднаний з входом третього перетворювача інформації, а його вихід сполучений з другим входом четвертого компаратора, вихід датчика кута на осі підвісу зовнішньої рами другого карданова підвісу поданий на вхід четвертого фільтра нижніх частот, вихід якого з'єднаний з входом четвертого перетворювача інформації, а його вихід сполучений з першим входом третього компаратора, вихід третього компаратора з'єднаний з другим входом обчислювального пристрою каналу кута ковзання, вихід четвертого компаратора 2 UA 78838 U 5 10 15 20 25 30 35 40 45 50 55 60 сполучений з першим входом обчислювального пристрою каналу кута ковзання, а його вихід поданий на вхід другого підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту системи орієнтації платформи другого одновісного гіроскопічного стабілізатора. Поставлена задача вирішується також тим, що входи обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднані з виходами інерціальної навігаційної системи. На фіг. 1 наведена електро-кінематична схема відмовостійкої системи орієнтування датчиків повітряних параметрів, на фіг. 2 - блок-схема алгоритму формування управляючого сигналу. Відмовостійка система орієнтування датчиків повітряних параметрів містить перший 1 і другий 2 одновісні гіроскопічні стабілізатори, перший 3 і другий 4 двовісні карданові підвіси, елементи яких за допомогою опор закріплені на корпусі 5. Перший двовісний карданів підвіс 3 містить внутрішню раму 6, зовнішню раму 7, датчик кута 8 на осі підвісу внутрішньої рами 6 та датчик кута 9 на осі підвісу зовнішньої рами 7. На внутрішній рамі 6 першого двовісного карданова підвісу 3 закріплений корпус приймача повітряного тиску 10. Другий двовісний карданів підвіс 4 містить внутрішню раму 11, зовнішню раму 12, датчик кута 13 на осі підвісу внутрішньої рами 11 та датчик кута 14 на осі підвісу зовнішньої рами 12. На внутрішній рамі 11 другого двовісного карданова підвісу 4 закріплений корпус датчика температури 15 загальмованого потоку повітря. Електричний зв'язок між функціональними вузлами відмовостійкої системи орієнтування датчиків повітряних параметрів здійснюється за допомогою індукційних сельсинних систем. Перша індукційна сельсинна система включає перший сельсин 16, другий сельсин 17, третій сельсин 18 в каналі кута атаки. Друга індукційна сельсинна система включає четвертий сельсин 19, п'ятий сельсин 20, шостий сельсин 21 в каналі кута ковзання. Кожна пара сельсинів 16-17, 16-18, 19-20, 19-21 працює в трансформаторному режимі. Ротор являє собою трифазну обмотку типа "зірка". Статор містить однофазну обмотку - збудження чи сигнальну. В склад відмовостійкої системи орієнтування датчиків повітряних параметрів входять чотири ідентичні слідкуючі системи, кожна з яких вмішує: підсилювач-перетворювач 22, електродвигун 23, механічний редуктор 24 - перша, підсилювач-перетворювач 25, електродвигун 26, механічний редуктор 27 - друга, підсилювач-перетворювач 28, електродвигун 29, механічний редуктор 30 - третя, підсилювач-перетворювач 31, електродвигун 32, механічний редуктор 33 четверта. Для отримання інформації про аеродинамічні кути атаки і ковзання використовується інерціальна навігаційна система (ІНС) 34, яка є підсистемою бортового навігаційного комплексу рухомого об'єкта. Вихідні сигнали 35 ІНС 34 містять інформацію про функції sinα, cosα, sinβ, cosβ кутів атаки α і ковзання β. Обчислювальний пристрій 36 використовується для отримання істинних значень кутів α атаки і β ковзання. Перший 37 і другий 38 виходи обчислювального пристрою 36 містять інформацію про істинне значення кута атаки, а третій 39 і четвертий 40 виходи обчислювального пристрою 36 містять інформацію про істинне значення кута ковзання. Канал кута атаки містить перший 41 та другий 42 фільтри нижніх частот, перший 43 та другий 44 перетворювачі інформації, перший 45 та другий 46 компаратори, обчислювальний пристрій 47 каналу кута атаки, перший підсилювач-перетворювач 48 та одновісний гіроскопічний стабілізатор 1. Канал кута ковзання містить третій 49 та четвертий 50 фільтри нижніх частот, третій 51 та четвертій 52 перетворювачі інформації, третій 53 та четвертий 54 компаратори, обчислювальний пристрій 55 каналу кута ковзання, другий підсилювач-перетворювач 56 та одновісний гіроскопічний стабілізатор 2. Одновісні гіроскопічні стабілізатори 1 і 2 аналогічні по конструкції і кожний з них містить: платформу 57, яка стабілізована відносно осі її підвісу, гіроблок 58, який являє собою двостепеневий гіроскоп, датчик кута 59 системи стабілізації, датчик моменту 60 системи стабілізації, датчик моменту 61 системи орієнтації платформи 57 та підсилювач-перетворювач 62 системи стабілізації платформи 57 - перший; платформу 63, гіроблок 64, датчик кута 65 системи стабілізації, датчик моменту 66 системи стабілізації, датчик моменту 67 системи орієнтації платформи 63 та підсилювач-перетворювач 68 системи стабілізації платформи 63 другий. На обмотки статорів першого сельсина 16 першої індукційної сельсинної системи та четвертого сельсина 19 другої індукційної сельсинної системи подана напруга 69 з джерела живлення. Приймач повітряного тиску 10 має пневматичні виходи 70 повного тиску та 71 статичного тиску відповідно, датчик температури 15 загальмованого потоку повітря має електричний вихід 72. 3 UA 78838 U 5 10 15 20 25 30 35 40 45 50 55 60 Вісь підвісу платформи 57 першого одновісного гіроскопічного стабілізатора 1 механічно зв'язана з ротором першого сельсина 16 першої індукційної сельсинної системи. Вісь підвісу внутрішньої рами 6 першого двовісного карданова підвісу 3 механічно зв'язана з ротором другого сельсина 17 першої індукційної сельсинної системи. Вісь підвісу внутрішньої рами 11 другого двовісного карданова підвісу 4 механічно зв'язана з ротором третього сельсина 18 першої індукційної сельсинної системи. Вісь підвісу платформи 63 другого одновісного гіроскопічного стабілізатора 2 механічно зв'язана з ротором четвертого сельсина 19 другої індукційної сельсинної системи. Вісь підвісу зовнішньої рами 7 першого двовісного карданова підвісу 3 механічно зв'язана з ротором п'ятого сельсина 20 другої індукційної сельсинної системи. Вісь підвісу зовнішньої рами 12 другого двовісного карданова підвісу 4 механічно зв'язана з ротором шостого сельсина 21 другої індукційної сельсинної системи. Відповідні вихідні точки обмоток роторів першого 16, другого 17, третього 18 сельсинів першої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною. Відповідні вихідні точки обмоток роторів четвертого 19, п'ятого 20, шостого 21 сельсинів другої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною. Обмотка статора другого сельсина 17 першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача 22 першої слідкуючої системи, вихід якого поданий на вхід електродвигуна 23, вихідний вал якого сполучений з входом механічного редуктора 24 першої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу внутрішньої рами 6 першого двовісного карданова підвісу 3. Обмотка статора третього сельсина 18 першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача 25 другої слідкуючої системи, вихід якого поданий на вхід електродвигуна 26, вихідний вал якого сполучений з входом механічного редуктора 27 другої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу внутрішньої рами 11 другого двовісного карданова підвісу 4. Обмотка статора п'ятого сельсина 20 другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача 28 третьої слідкуючої системи, вихід якого поданий на вхід електродвигуна 29, вихідний вал якого сполучений з входом механічного редуктора 30 третьої слідкуючої системи, вихід якого механічно зв'язний з віссю підвісу зовнішньої рами 7 першого двовісного карданова підвісу 3. Обмотка статора шостого сельсина 21 другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача 31 четвертої слідкуючої системи, вихід якого поданий на вхід електродвигуна 32, вихідний вал якого сполучений з входом механічного редуктора 33 четвертої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу зовнішньої рами 12 другого двовісного карданова підвісу 4. Виходи 35 ІНС 34 подані на входи обчислювального пристрою 36 формування істинних значень кутів атаки і ковзання. Перший вихід 37 обчислювального пристрою 36 з'єднаний з першим входом першого компаратора 45, другий вихід 38 пристрою 36 з'єднаний з першим входом другого компаратора 46. Третій вихід 39 обчислювального пристрою 36 з'єднаний з першим входом четвертого компаратора 54. Четвертий вихід 40 пристрою 36 сполучений з другим входом третього компаратора 53. Вихід датчика кута 8 на осі підвісу внутрішньої рами 6 першого двовісного карданова підвісу 3 поданий на вхід першого фільтра 41 нижніх частот, вихід якого з'єднаний з входом першого перетворювача інформації 43. Вихід першого перетворювача інформації 43 сполучений з другим входом першого компаратора 45, вихід якого поданий на перший вхід обчислювального пристрою 47 каналу кута атаки. Вихід датчика кута 13 на осі підвісу внутрішньої рами 11 двовісного карданова підвісу 4 поданий на вхід другого фільтра 42 нижніх частот. Вихід фільтра 42 з'єднаний з входом другого перетворювача інформації 44, а його вихід сполучений з другим входом другого компаратора 46. Вихід другого компаратора 46 поданий на другий вхід обчислювального пристрою 47 каналу кута атаки. Вихід обчислювального пристрою 47 з'єднаний з входом першого підсилювачаперетворювача 48, а його вихід сполучений з входом датчика моменту 61 системи орієнтації платформи 57 першого одновісного гіроскопічного стабілізатора 1. Вихід датчика кута 9 на осі підвісу зовнішньої рами 7 першого двовісного карданова підвісу 3 поданий на вхід третього фільтра 49 нижніх частот. Вихід фільтра 49 з'єднаний з входом третього перетворювача інформації 51, а його вихід сполучений з другим входом четвертого компаратора 54. Вихід датчика кута 14 на осі підвісу зовнішньої рами 12 другого карданова підвісу 4 поданий на вхід четвертого фільтра 50 нижніх частот, вихід якого з'єднаний з входом четвертого перетворювача інформації 52. Вихід перетворювача інформації 52 сполучений з першим входом третього компаратора 53, вихід якого з'єднаний з другим входом 4 UA 78838 U 5 10 15 20 25 30 35 40 45 50 55 обчислювального пристрою 55 каналу кута ковзання. Вихід четвертого компаратора 54 сполучений з першим входом обчислювального пристрою 55 каналу кута ковзання. Вихід обчислювального пристрою 55 поданий на вхід другого підсилювача-перетворювача 56, вихід якого з'єднаний з входом датчика моменту 67 системи орієнтації платформи 63 другого одновісного гіроскопічного стабілізатора 2. Відмовостійка система орієнтування датчиків повітряних параметрів працює наступним чином. Задача системи в цілому - орієнтування приймача повітряного тиску 10 та датчика температури 15 загальмованого потоку повітря в просторі таким чином, щоб їх повздовжні осі в процесі руху корпусу 5 співпадали з вектором швидкості набігаючого потоку повітря. Це можливо реалізувати при наявності інформації про істинні значення кутів атаки і ковзання, які характеризують стан корпусу 5 в просторі відносно вектора швидкості набігаючого потоку повітря. Призначення одновісних гіроскопічних стабілізаторів 1 і 2 дистанційно керувати положенням двовісних карданових підвісів 3 та 4, в яких розміщені корпуси приймача повітряного тиску 10 та датчика температури 15 загальмованого потоку повітря відповідно. Використання одновісних гіроскопічних стабілізаторів 1 і 2 дозволяє забезпечити необмежені кути повороту платформи 57 відносно осі її підвісу і платформи 63 відносно осі її підвісу в корпусі 5. При цьому вісь підвісу платформи 57 паралельна осі OZ, а платформи 63 - осі OY зв'язаної з корпусом об'єкта системи координат OXYZ. Осі підвісу зовнішніх рам 7 і 12 першого 3 та другого 4 двовісних карданових підвісів відповідно та платформи 63 другого одновісного гіроскопічного стабілізатора 2 паралельні одна одній та осі OY зв'язаної системи координат OXYZ. В початковий момент часу приймач повітряного тиску 10 в першому двовісному кардановому підвісу 3 та датчик температури 15 загальмованого потоку повітря в другому двовісному кардановому підвісі 4 займають певне довільне положення відносно корпусу 5 і відносно вектора швидкості набігаючого потоку повітря. За допомогою інерціальної навігаційної системи 34 та обчислювального пристрою 36 формування істинних значень кутів атаки та ковзання отримується інформація про істинні величина цих кутів. Вихідний сигнал 37 обчислювального пристрою 36, який містить інформацію про істинне значення кута атаки, поданий на перший вхід першого компаратора 45. На другий вхід першого компаратора 45 подається сигнал, сформований за допомогою датчика кута 8, першого фільтра 41 нижніх частот та першого перетворювача інформації 43. Різниця сигналів, поданих на перший і другий входи першого компаратора 45, є сигнали неузгодженості істинного значення кута атаки і положення приймача повітряного тиску 10 відносно осі підвісу внутрішньої рами 6 першого карданова підвісу 3. Цей сигнал неузгодженості є вихідним сигналом першого компаратора 45. Вихідний сигнал 38 обчислювального пристрою 36, який містить інформацію про істинне значення кута атаки, поданий на перший вхід другого компаратора 46. На другий вхід другого компаратора 46 подається сигнал, сформований за допомогою датчика кута 13, другого фільтра 42 нижніх частот та другого перетворювача інформації 44. Різниця сигналів, поданих на перший і другий входи другого компаратора 46, є сигналом неузгодженості істинного значення кута атаки і положення датчика температури 15 загальмованого потоку повітря відносно осі підвісу внутрішньої рами 11 другого карданова підвісу 4. Цей сигнал неузгодженості є вихідним сигналом другого компаратора 46. Сигнал управління формується за допомогою обчислювального пристрою 47 каналу кута атаки з використанням вихідних сигналів компараторів першого 45 і другого 46 у відповідності до спеціального алгоритму. Блок-схема алгоритму формування управляючого сигналу наведена на фіг. 2. на схемі: α37, α38 - вихідні сигнали 37 і 38 відповідно обчислювального пристрою 36; α 43 - вихідний сигнал першого перетворювача 43; α44 - вихідний сигнал другого перетворювача 44, α47 - вихідний сигнал обчислювального пристрою 47 каналу кута атаки. Враховуючи, що α37=α38=α у відповідності до алгоритму, отримаємо α37-α43=α-α43=α45; α38-α44=α-α44=α46, де α45, α46 - вихідні сигнали першого компаратора 45 і другого компаратора 46 відповідно. За допомогою обчислювального пристрою 47 реалізуються такі перетворення: α45+α46=α-α43+α-α44=2α-(α43+α44); 1 2 43 44 43 44 . 2 2 Значення α в отриманій залежності можна представити як діяння, що задається, а другу складову - як похибку. Таким чином, за допомогою обчислювального пристрою 47, який вміщує зокрема регулятор, формується сигнал управління, що з використанням підсилювача 5 UA 78838 U 5 10 15 20 25 30 35 40 45 50 55 перетворювача 48 подається на датчик моменту 61 системи орієнтації платформи 57 гіроскопічного стабілізатора 1. При подачі напруги 69 з джерела живлення на вхід обмоток статорів сельсинів 16 і 19 має місце синхронізація кутових станів платформи 57 гіроскопічного стабілізатора 1, внутрішньої рами 6 першого двовісного карданова підвісу 3 та внутрішньої рами 11 другого двовісного карданова підвісу 4, що обумовлює прямування похибки 1 43 44 до нульового значення, а 2 кутів відхилення внутрішньої рами 6 першого карданова підвісу 3 та внутрішньої рами 11 другого карданова підвісу 4 до значення α. При цьому кут відхилення платформи 57 першого гіроскопічного стабілізатора 1 також відповідає значенню α кута атаки рухомого об'єкта. Процес синхронізації кутових положень платформи 57, внутрішньої рами 6 (корпуса приймача повітряного тиску 10), внутрішньої рами 11 (корпуса датчика температури 15 загальмованного потоку повітря) реалізується за допомогою першого 16, другого 17, третього 18 сельсинів першої індукційної сельсинної системи та першої (елементи 17, 22, 23, 24) і другої (елементи 18, 25, 26, 27) слідкуючих систем каналу кута атаки. При наявності неузгодженості значення кута атаки як вихідного параметра обчислювального пристрою 36 та кутових положень рам 6 і 11 першого 3 та другого 4 двовісних карданових підвісів відповідно, а значить - істинного значення кута атаки і кутового положення платформи 57 гіроскопічного стабілізатора 1 сигнал управління з виходу обчислювального пристрою 47 підсилюється і перетворюється за допомогою підсилювача-перетворювача 48 та подається на датчик моменту 61 системи орієнтації платформи 57 гіроскопічного стабілізатора 1. В результаті має місце прецесія платформи 57 відносно осі її підвісу. Поворот платформи 57 гіроскопічного стабілізатора 1 за допомогою першої індукційної сельсинної системи та першої і другої слідкуючих систем обумовлює поворот на певний кут рами 6 першого 3 і рами 11 другого 4 двовісних карданових підвісів відповідно відносно осей підвісу вказаних рам. Вихідні сигнали статорів сельсинів 17 і 18 першої індукційної сельсинної системи, пропорційні кутам неузгодженості роторів сельсина 16 та сельсинів 17 і 18, подаються на входи підсилювачівперетворювачів 22 і 25 першої і другої слідкуючих систем відповідно каналу кута атаки. Вихідні сигнали управління підсилювачів-перетворювачів 22 і 25 подані на входи електродвигунів 23 і 26 першої і другої слідкуючих систем відповідно. Відпрацьовуючи сигнал управління електродвигун 23 за допомогою механічного редуктора 24 обертає ротор сельсина 17, а значить - раму 6 першого двовісного карданова підвісу 3 до кутового стану, який співпадає з кутовим станом ротора сельсина 16 або платформи 57 першого одновісного гіроскопічного стабілізатора 1. Відпрацьовуючи сигнал управління електродвигун 26 за допомогою механічного редуктора 27 обертає ротор сельсина 18, а значить - раму 11 другого двовісного карданова підвісу 4 кутового стану, який співпадає з кутовим станом ротора сельсина 16 або платформи 57 першого одновісного гіроскопічного стабілізатора 1. Таким чином досягається синхронізація кутових станів платформи 57 гіроскопічного стабілізатора 1, внутрішніх рам 6 і 11 першого 3 і другого 4 двостепеневих карданових підвісів відповідно. При цьому має місце узгодженість істинного значення кута атаки і кутів повороту корпусу приймача повітряного тиску 10 і корпусу датчика температури 15 загальмованого потоку повітря відносно осей їх підвісу 6 і 11 відповідно. Аналогічним чином працює система орієнтування датчиків повітряних параметрів в каналі кута ковзання. Вихідний сигнал 39 обчислювального пристрою 36, який містить інформацію про істинне значення кута ковзання, поданий на перший вхід четвертого компаратора 54. На другий вхід четвертого компаратора 54 подається сигнал, сформований за допомогою датчика кута 9, третього фільтра 49 нижніх частот та третього перетворювача інформації 51. Різниця сигналів, поданих на перший і другий входи четвертого компаратора 54, є сигналом неузгодженості істинного значення кута ковзання і положення приймача повітряного тиску 10 відносно осі підвісу зовнішньої рами 7 першого карданова підвісу 3. Цей сигнал неузгодженості є вихідним сигналом четвертого компаратора 54. Вихідний сигнал 40 обчислювального пристрою 36, який містить інформацію про істинне значення кута ковзання, поданий на другий вхід третього компаратора 53. На перший вхід третього компаратора 53 подається сигнал, сформований за допомогою датчика кута 14, четвертого фільтра 50 нижніх частот та четвертого перетворювача інформації 52. Різниця сигналів, поданих на перший і другий входи третього компаратора 53, є сигналом неузгодженості істинного значення кута ковзання і положення датчика температури 15 загальмованого потоку повітря відносно осі підвісу зовнішньої рами 12 другого карданова підвісу 4. Цей сигнал неузгодженості є вихідним сигналом третього компаратора 53. 6 UA 78838 U 5 10 15 20 25 30 35 40 45 50 55 Сигнал управління формується за допомогою обчислювального пристрою 55 каналу кута ковзання з використанням вихідних сигналів компараторів третього 53 і четвертого 54 у відповідності до спеціального алгоритму. Блок-схема цього алгоритму аналогічна блок-схемі алгоритму, представленій на фіг. 2 для канала кута атаки. В каналі кута ковзання значення β, яке формується за допомогою обчислювального 52 пристрою 36, можна представити як діяння, що задаються, а складову 51 - як похибку 2 (β51, β52 - вихідні сигнали третього 51 та четвертого 52 перетворювачів відповідно каналу кута ковзання). За допомогою обчислювального пристрою 55, який вміщує зокрема регулятор, формуються сигнал управління, що з використанням підсилювача-перетворювача 56 подається на датчик моменту 67 системи орієнтації платформи 63 гіроскопічного стабілізатора 2. При функціонуванні системи в цілому має місце синхронізація кутових станів платформи 63 гіроскопічного стабілізатора 2, зовнішньої рами 7 першого двовісного карданова підвісу 3 та зовнішньої рами 12 другого двовісного карданова підвісу 4, що обумовлює прямування похибки 51 52 до нульової значення, а кутів відхилення зовнішньої рами 7 першого карданова 2 підвісу 3 та зовнішньої рами 12 другого карданова підвісу 4 до значення β. При цьому кут відхилення платформи 63 другого гіроскопічного стабілізатора 2 також відповідає значенню β кута ковзання рухомого об'єкта. Процес синхронізації кутових положень платформи 63, зовнішньої рами 7 (корпуса приймача повітряного тиску 10), зовнішньої рами 12 (корпуса датчика температури 15 загальмованого потоку повітря) реалізується за допомогою четвертого 19, п'ятого 20, шостого 21 сельсинів другої індукційної сельсинної системи та третьої (елементи 20, 28, 29, 10) і четвертої (елементи 21, 31, 32, 33) слідкуючих систем каналу кута ковзання. При наявності неузгодженості значення кута ковзання як вихідного параметра обчислюваного пристрою 36 та кутових положень рам 7 і 12 першого 3 та другого 4 двовісних карданових підвісів відповідно, а значить - істинного значення кута ковзання і кутового положення платформи 63 гіроскопічного стабілізатора 2, сигнал управління з виходу обчислювального пристрою 55 підсилюється і перетворюється за допомогою підсилювачаперетворювача 56 та подається на датчик моменту 67 системи орієнтації платформи 63 гіроскопічного стабілізатора 2. В результаті має місце прецесія платформи 63 відносно осі її підвісу. Поворот платформи 63 гіроскопічного стабілізатора 2 за допомогою другої індукційної сельсинної системи та третьої і четвертої слідкуючих систем обумовлює поворот на повний кут зовнішньої рами 7 першого 3 і зовнішньої рами 12 другого 4 двовісних карданових підвісів відповідно відносно осей підвісу вказаних рам. Вихідні сигнали статорів сельсинів 20 і 21 другої індукційної сельсинної системи, пропорційні кутам неузгодженості роторів сельсина 19 та сельсинів 20 і 21, подаються на входи підсилювачів-перетворювачів 28. 31 третьої і четвертої слідкуючих систем відповідно каналу кута ковзання. Вихідні сигнали управління підсилювачівперетворювачів 28 і 31 подані на входи електродвигунів 29 і 32 третьої і четвертої слідкуючих систем відповідно. Відпрацьовуючи сигнал управління, електродвигун 29 за допомогою механічного редуктора 30 обертає ротор сельсина 20, а значить - раму 7 першого двовісного карданова підвісу 3 до кутового стану, який співпадає з кутовим станом ротора сельсина 19 або платформи 63 другого одновісного гіроскопічного стабілізатора 2. Відпрацьовуючи сигнал управління електродвигун 32 за допомогою механічного редуктора 33 обертає ротор сельсина 21, а значить - раму 12 другого двовісного карданова підвісу 4 до кутового стану, який співпадає з кутовим станом ротора сельсина 19 або платформи 63 другого одновісного гіроскопічного стабілізатора 2. Таким чином досягається синхронізація кутових станів платформи 63 гіроскопічного стабілізатора 2, зовнішніх рам 7 і 12 першого 3 і другого 4 двостепеневих карданових підвісів відповідно. При цьому має місце узгодженість істинного значення кута ковзання і кутів повороту корпусу приймача повітряного тиску 10 і корпусу датчика температури 15 загальмованого потоку повітря відносно осей підвісу їх рам 7 і 12. Система синхронізації працює таким чином, що сигнали неузгодженості на виходах компараторів 45, 46, 53, 54 обох каналів спрямовані до нуля в сталому режимі, тобто приймач повітряного тиску 10 і датчик температури 15 загальмованого потоку повітря орієнтується вздовж вектора швидкості набігаючого потоку повітря. Відмовостійкість системи орієнтування датчиків повітряних параметрів, що пропонується, визначається наступним. 1. В разі жорсткого закріплення приймача повітряного тиску та датчика температури загальмованого потоку повітря на корпусі рухомого об'єкта припустимі похибки останніх 7 UA 78838 U 5 10 15 відповідають значенням кутів атаки і ковзання рухомого об'єкта в межах ±15°. При збільшенні значень кутів атаки і ковзання, що є цілком природно для маневрених рухомих об'єктів, похибки приймача повітряного тиску і датчика температури загальмованого потоку повітря значно перевищують допустимі межі, що еквівалентно відмові цих пристроїв і, відповідно, вимірювальних комплексів, в які вони входять. В запропонованій системі кути атаки і ковзання рухомого об'єкта можуть змінюватись практично в межах ±180°, що не викликає похибок датчиків повітряних параметрів і відповідних інформаційно-вимірювальних комплексів. 2. В системі, яка пропонується, з урахуванням принципу структурно-функціональної надлишковості реалізовані двоканальні системи управління гіростабілізаторами з використанням інформації від інерціальної системи навігації та датчиків кутів осей карданових підвісів приймача повітряного тиску та датчика температури загальмованого потоку повітря (елементи 8, 13 в каналі кута атаки і 9, 14 в каналі кута ковзання). При появі відмови одного з карданових підвісів чи одного з датчиків кутів на осях карданова підвісу роботоспроможність всієї системи орієнтування датчиків повітряних параметрів зберігається. Структурнофункціональна надлишковість в системі зберігається також використанням спеціальних алгоритмів обробкиінформації в обчислювальних пристроях 47,55. Таким чином, запропонована система дозволяє підвищити точність вимірювання повного та статичного тиску і температури загальмованого потоку повітря, а також підвищити відмовостійкість вимірювальної системи. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 55 60 1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата за допомогою двовісних карданових підвісів з додатковими скобами корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені два - перший і другий - одновісних гіроскопічних стабілізатори, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зовнішню раму та по одному датчику кутів на осях підвісу рам, а на внутрішній рамі першого двовісного карданова підвісу закріплений корпус приймача повітряного тиску, на внутрішній рамі другого двовісного карданова підвісу закріплений корпус датчика температури загальмованого потоку повітря, дві індукційні сельсинні системи - перша в каналі кута атаки, друга в каналі кута ковзання, кожна з яких включає по три - перший, другий та третій, четвертий, п'ятий та шостий відповідно - сельсини з електрично зв'язаними обмотками роторів, чотири ідентичні слідкуючі системи - перша та друга в каналі кута атаки, третя та четверта в каналі кута ковзання - кожна з яких вміщує підсилювач-перетворювач, електродвигун, механічний редуктор, також введені обчислювальний пристрій формування істинних значень кутів атаки і ковзання, перший та другий фільтри нижніх частот, перший та другий перетворювачі інформації, перший та другий компаратори, обчислювальний пристрій каналу кута атаки та перший підсилювач-перетворювач, третій та четвертий фільтри нижніх частот, третій та четвертий перетворювачі інформації, третій та четвертий компаратори, обчислювальний пристрій каналу кута ковзання та другий підсилювач-перетворювач, причому вісь підвісу платформи першого одновісного гіроскопічного стабілізатора механічно зв'язана з ротором першого сельсина першої індукційної сельсинної системи, вісь підвісу внутрішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором другого сельсина першої індукційної сельсинної системи, вісь підвісу внутрішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором третього сельсина першої індукційної сельсинної системи, вісь підвісу платформи другого одновісного гіроскопічного стабілізатора механічно зв'язана з ротором четвертого сельсина другої індукційної сельсинної системи, вісь підвісу зовнішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором п'ятого сельсина другої індукційної сельсинної системи, вісь підвісу зовнішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором шостого сельсина другої індукційної сельсинної системи, відповідні вихідні точки обмоток роторів першого, другого, третього сельсинів першої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, відповідні вихідні точки обмоток роторів четвертого, п'ятого, шостого сельсинів другої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, на обмотки статорів першого сельсина першої індукційної сельсинної системи та четвертого сельсина другої індукційної сельсинної системи подана напруга з джерела живлення, обмотка статора другого сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача - перетворювача першої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора першої 8 UA 78838 U 5 10 15 20 25 30 35 40 слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу внутрішньої рами першого двовісного карданова підвісу, обмотка статора третього сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача другої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора другої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу внутрішньої рами другого двовісного карданова підвісу, обмотка статора п'ятого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача третьої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора третьої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу зовнішньої рами першого двовісного карданова підвісу, обмотка статора шостого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача четвертої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входом механічного редуктора четвертої слідкуючої системи, вихід якого механічно зв'язаний з віссю підвісу зовнішньої рами другого двовісного карданова підвісу, перший вихід обчислювального пристрою формування істинних значень кутів атаки та ковзання з'єднаний з першим входом першого компаратора, другий вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з першим входом другого компаратора, третій вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з першим входом четвертого компаратора, четвертий вихід обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднаний з другим входом третього компаратора, вихід датчика кута на осі підвісу внутрішньої рами першого двовісного карданова підвісу поданий на вхід першого фільтра нижніх частот, вихід якого з'єднаний з входом першого перетворювача інформації, а його вихід сполучений з другим входом першого компаратора, вихід його поданий на перший вхід обчислювального пристрою каналу кута атаки, вихід датчика кута на осі підвісу внутрішньої рами другого двовісного карданова підвісу поданий на вхід другого фільтра нижніх частот, вихід якого з'єднаний з входом другого перетворювача інформації, а його вихід сполучений з другим входом другого компаратора, вихід другого компаратора поданий на другий вхід обчислювального пристрою каналу кута атаки, а його вихід з'єднаний з входом першого підсилювача-перетворювача, вихід якого сполучений з входом датчика моменту системи орієнтації платформи першого одновісного гіроскопічного стабілізатора, вихід датчика кута на осі підвісу зовнішньої рами першого двовісного карданова підвісу поданий на вхід третього фільтра нижніх частот, вихід якого з'єднаний з входом третього перетворювача інформації, а його вихід сполучений з другим входом четвертого компаратора, вихід датчика кута на осі підвісу зовнішньої рами другого карданова підвісу поданий на вхід четвертого фільтра нижніх частот, вихід якого з'єднаний з входом четвертого перетворювача інформації, а його вихід сполучений з першим входом третього компаратора, вихід третього компаратора з'єднаний з другим входом обчислювального пристрою каналу кута ковзання, вихід четвертого компаратора сполучений з першим входом обчислювального пристрою каналу кута ковзання, а його вихід поданий на вхід другого підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту системи орієнтації платформи другого одновісного гіроскопічного стабілізатора. 2. Відмовостійка система орієнтування датчиків повітряних параметрів відповідно за п. 1, яка відрізняється тим, що входи обчислювального пристрою формування істинних значень кутів атаки і ковзання з'єднані з виходами інерціальної навігаційної системи. 9 UA 78838 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюFault-tolerant system of orientation of air parameter sensors
Автори англійськоюHordin Oleksandr Hryhorovych, Zekina Viktoria Olehivna
Назва патенту російськоюОтказоустойчивая система ориентирования датчиков воздушных параметров
Автори російськоюГордин Александр Григорьевич, Зекина Виктория Олеговна
МПК / Мітки
МПК: G01P 5/14
Мітки: відмовостійка, датчиків, параметрів, орієнтування, повітряних, система
Код посилання
<a href="https://ua.patents.su/12-78838-vidmovostijjka-sistema-oriehntuvannya-datchikiv-povitryanikh-parametriv.html" target="_blank" rel="follow" title="База патентів України">Відмовостійка система орієнтування датчиків повітряних параметрів</a>
Відмовостійка система орієнтування датчиків повітряних параметрів
Номер патенту: 68293
Опубліковано: 26.03.2012
Автори: Гордін Олександр Григорович, Гавриленко Ірина Володимирівна
МПК: G01P 5/14
Мітки: відмовостійка, система, орієнтування, датчиків, параметрів, повітряних
Формула / Реферат:
1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по...
Відмовостійка система орієнтування датчиків повітряних параметрів

Номер патенту: 62526
Опубліковано: 25.08.2011
Автори: Гордін Олександр Григорович, Гавриленко Ірина Володимирівна
МПК: G01P 5/14
Мітки: датчиків, параметрів, система, орієнтування, відмовостійка, повітряних
Формула / Реферат:
1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по...
Система орієнтування приймача повітряного тиску
Номер патенту: 56886
Опубліковано: 25.01.2011
Автори: Сушко Олексій Володимирович, Кописов Олег Едуардович, Гордін Олександр Григорович
МПК: G01P 5/14, G01P 13/00
Мітки: повітряного, система, орієнтування, приймача, тиску
Формула / Реферат:
1. Система орієнтування приймача повітряного тиску, що містить закріплений на корпусі літального апарата приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, двовісний підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на...
Система орієнтування приймача температури загальмованого потоку повітря

Номер патенту: 58995
Опубліковано: 26.04.2011
Автори: Гордін Олександр Григорович, Гавриленко Ірина Володимирівна
МПК: G01P 5/14
Мітки: температури, повітря, орієнтування, приймача, система, загальмованого, потоку
Формула / Реферат:
1. Система орієнтування приймача температури загальмованого потоку повітря, що містить закріплений на поверхні літального апарата корпус приймача температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, двовісний кардановий підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на внутрішній рамі двовісного карданового підвісу закріплений...
Відмовостійка система з аналізом ресурсу
Номер патенту: 15201
Опубліковано: 15.06.2006
Автори: Кулік Анатолій Степанович, Дергачов Володимир Андрійович, Кулік Тамара Васильовна
МПК: G06F 11/18
Мітки: аналізом, ресурсу, відмовостійка, система
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, перший двійковий лічильник, перший і другий елементи АБО, n детекторів фронту, n детекторів спаду, виходи індикації технічного стану, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента I, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І,...
Попередній патент: Спосіб магнітної сепарації магнетитових руд панкратова
Наступний патент: Спосіб ранньої реабілітації дітей і підлітків, оперованих на легенях
Випадковий патент: Спосіб регулювання випромінюваної потужності радіопередавальних пристроїв стільникових мереж в залежності від кліматичних умов