Відмовостійка система орієнтування датчиків повітряних параметрів
Номер патенту: 68293
Опубліковано: 26.03.2012
Автори: Гордін Олександр Григорович, Гавриленко Ірина Володимирівна
Формула / Реферат
1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по одному датчику кутів на осях підвісу скоби внутрішньої рами та зовнішньої рами, а на внутрішній рамі першого двовісного карданова підвісу закріплений корпус приймача повітряного тиску, на внутрішній рамі другого карданова підвісу закріплений корпус датчика температури загальмованого потоку повітря, дві індукційні сельсинні системи - перша в каналі кута атаки, друга в каналі кута ковзання, кожна з яких включає по три - перший, другий та третій, четвертий, п'ятий та шостий відповідно - сельсини з електрично зв'язаними обмотками роторів, чотири ідентичні слідкуючі системи - перша та друга в каналі кута атаки, третя та четверта в каналі кута ковзання, - кожна з яких вміщує підсилювач-перетворювач, електродвигун, два - перший та другий - механічні редуктори та пристрій формування вихідного сигналу, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні сигнали на осях підвісу флюгерних датчиків, перший, другий та третій фільтри нижніх частот, перший та другий компаратори, обчислювальний пристрій каналу кута атаки та перший підсилювач-перетворювач, четвертий, п'ятий та шостий фільтри нижніх частот, третій та четвертий компаратори, обчислювальний пристрій каналу кута ковзання та другий підсилювач-перетворювач, блок формування вихідних електричних сигналів для кутів атаки та ковзання, причому вісь підвісу рами двовісного гіроскопічного стабілізатора механічно зв'язана з ротором першого сельсина першої індукційної сельсинної системи, вісь підвісу зовнішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором другого сельсина першої індукційної сельсинної системи, вісь підвісу зовнішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором третього сельсина першої індукційної сельсинної системи, вісь підвісу скоби платформи двовісного гіроскопічного стабілізатора механічно зв'язана з ротором четвертого сельсина другої індукційної сельсинної системи, вісь підвісу скоби внутрішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором п'ятого сельсина другої індукційної сельсинної системи, вісь підвісу скоби внутрішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором шостого сельсина другої індукційної сельсинної системи, вихідні точки обмоток роторів першого, другого, третього сельсинів першої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, вихідні точки обмоток роторів четвертого, п'ятого, шостого сельсинів другої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, на обмотки статорів першого сельсина першої індукційної сельсинної системи та четвертого сельсина другої індукційної сельсинної системи подана напруга з джерела живлення, обмотка статора другого сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача першої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів першої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу зовнішньої рами першого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу першої слідкуючої системи, вихід якого з'єднаний з першим входом блока формування вихідних електричних сигналів для кутів атаки і ковзання, обмотка статора третього сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача другої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів другої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу зовнішньої рами другого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу другої слідкуючої системи, вихід якого з'єднаний з другим входом блока формування вихідних електричних сигналів для кутів атаки та ковзання, обмотка статора п'ятого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача третьої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів третьої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу скоби внутрішньої рами першого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу третьої слідкуючої системи, вихід якого з'єднаний з третім входом блока формування вихідних електричних сигналів для кутів атаки та ковзання, обмотка статора шостого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача четвертої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів четвертої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу скоби внутрішньої рами другого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу четвертої слідкуючої системи, вихід якого з'єднаний з четвертим входом блока формування вихідних електричних сигналів для кутів атаки і ковзання, вихід перетворювача кута атаки в електричний сигнал з'єднаний з входом першого фільтра нижніх частот, перший вихід якого сполучений з першим входом першого компаратора каналу кута атаки, вихід датчика кута на осі підвісу зовнішньої рами першого двовісного карданова підвісу з'єднаний з входом другого фільтра нижніх частот, вихід якого сполучений з другим входом першого компаратора каналу кута атаки, другий вихід першого фільтра нижніх частот каналу кута атаки з'єднаний з першим входом другого компаратора каналу кута атаки, вихід датчика кута на осі підвісу зовнішньої рами другого двовісного карданова підвісу сполучений з входом третього фільтра нижніх частот, вихід якого сполучений з другим входом другого компаратора каналу кута атаки, а виходи першого і другого компараторів каналу кута атаки з'єднані з першим і другим входами відповідно обчислювального пристрою каналу кута атаки, вихід якого з'єднаний з входом першого підсилювача-перетворювача, вихід якого поданий на вхід датчика моменту другого двоступеневого гіроскопа двовісного гіроскопічного стабілізатора, вихід перетворювача кута ковзання в електричний сигнал з'єднаний з входом четвертого фільтра нижніх частот, перший вихід якого сполучений з першим входом третього компаратора каналу кута ковзання, вихід датчика кута на осі підвісу скоби внутрішньої рами другого двовісного карданова підвісу з'єднаний з входом п'ятого фільтра нижніх частот, вихід якого сполучений з другим входом третього компаратора каналу кута ковзання, другий вихід четвертого фільтра нижніх частот каналу кута ковзання з'єднаний з першим входом четвертого компаратора каналу кута ковзання, вихід датчика кута на осі підвісу скоби внутрішньої рами першого двовісного карданова підвісу сполучений з входом шостого фільтра нижніх частот, вихід якого сполучений з другим входом четвертого компаратора каналу кута ковзання, а виходи третього і четвертого компараторів каналу кута ковзання з'єднані з першим і другим входами відповідно обчислювального пристрою каналу кута ковзання, вихід якого з'єднаний з входом другого підсилювача-перетворювача, вихід якого поданий на вхід датчика моменту першого двоступеневого гіроскопа двовісного гіроскопічного стабілізатора.
2. Відмовостійка система орієнтування датчиків повітряних параметрів за п. 1, яка відрізняється тим, що двовісний гіроскопічний стабілізатор містить платформу, скобу платформи, раму, перший та другий двоступеневі гіроскопи з взаємно ортогональними осями чутливості та датчиками кута та моменту на осях підвісу рам кожного гіроскопа, дві системи силової гіроскопічної стабілізації, перша з яких складається з першого двоступеневого гіроскопа, датчика кута на осі підвісу рами першого двоступеневого гіроскопа, третього підсилювача-перетворювача і датчика моменту на осі підвісу скоби платформи, причому вихід датчика кута на осі підвісу рами першого двоступеневого гіроскопа з'єднаний з входом третього підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту на осі підвісу скоби платформи, друга система силової гіроскопічної стабілізації складається з другого двоступеневого гіроскопа, датчика кута на осі підвісу рами другого двоступеневого гіроскопа, четвертого підсилювача-перетворювача і датчика моменту на осі підвісу рами, причому вихід датчика кута на осі підвісу рами двоступеневого гіроскопа з'єднаний з входом четвертого підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту на осі підвісу рами.
Текст
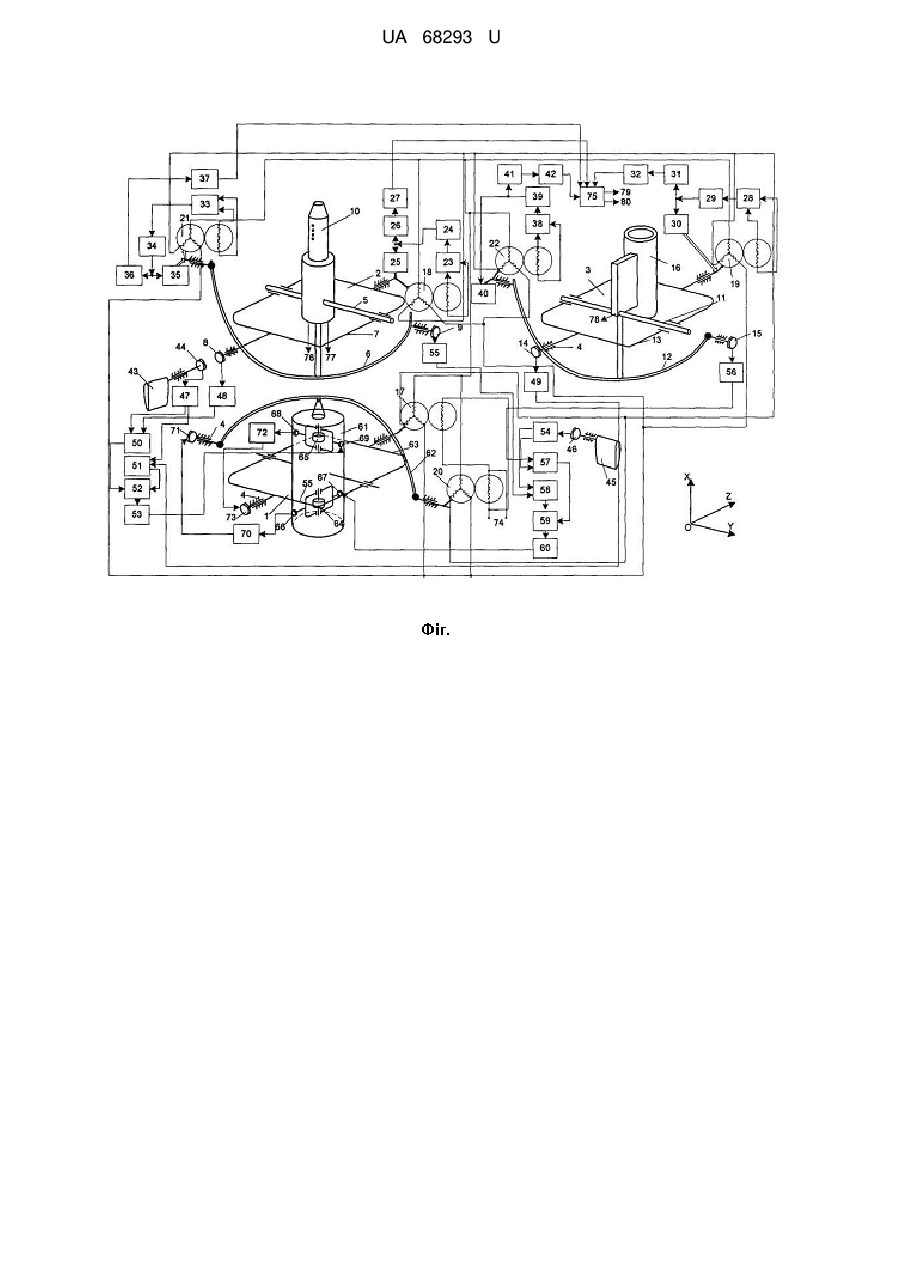
Реферат: UA 68293 U UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки і може бути використана в аерометричних системах та системах повітряних сигналів високоманеврених пілотованих та безпілотних літальних апаратів. В якості аналогу вибрана система орієнтування приймача повітряного тиску [Пат №56886 України. МПК (2011.01) G01P5/14, G01P13/00 опубл. 25.01.2011 Бюл. №2], який містить закріплений на корпусі літального апарата приймач повітряного тиску в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, двовісний гіроскопічний стабілізатор та двовісний кардановий підвіс приймача повітряного тиску, на кожній осі якого розміщені по два датчика кута, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів в електричні сигнали. Недоліками цієї системи є використання лише приймача повітряного тиску в якості вимірювального пристрою, адже в системах повітряних сигналів використовується два типа вимірювачів: статичного та повного тиску повітря і температури загальмованого потоку повітря. Значним її недоліком є також висока міра зашумленості сигналів з перетворювачів кутів атаки та ковзання в електричний сигнал, адже флюгерні датчики кутів працюють у турбулентному потоці повітря. Окрім того, при появі відмови карданова підвісу чи одного з датчиків кутів на осях карданова підвісу, з яких знімаються вихідні сигнали кутів атаки та ковзання, блок формування вихідних сигналів буде сприймати невірні значення кутів атаки та ковзання, які неможливо буде використовувати далі. Використання механічних елементів зв'язку для поєднання гіроскопічного стабілізатора з кардановими підвісами приймача повітряного тиску та датчика температури загальмованого потоку повітря зумовлює заздалегідь визначене і обмежене взаємне положення приймача повітряного тиску, датчика температури загальмованого потоку повітря та двовісного гіроскопічного стабілізатора. Це обмежує сферу застосування пропонованої системи орієнтування датчиків повітряних параметрів. Відома найбільш близька та вибрана в якості прототипу система, яка вміщує приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, та датчик температури загальмованого потоку повітря, який має електричний вихід [Боднер В.А. Авиационные приборы. М.: Машиностроение, 1969, с.210-216, 326-330. Браславский Д.А., Логунов С.С., Пельпор Д.С. Авиационные приборы и автоматы. М.: Машиностроение, 1978, с.180-182, 217-222. Браславский Д.А., Логунов С.С., Пельпор Д.С. Авиационные приборы. М.: Машиностроение, 1964, с. 186-187. Браславский Д.А. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1964, с.293, 306, 307, 318-322]. Недоліками цієї системи є значні похибки вимірювання температури загальмованого потоку повітря та статичного і повного повітряного тиску при польоті з великими кутами атаки і ковзання, адже кути атаки і ковзання високо маневреного рухомого об'єкта можуть змінюватися в межах ±80°. Задачею корисної моделі є збільшення точності вимірювання повного та статичного тиску та температури загальмованого потоку повітря за рахунок введення системи орієнтування приймача повітряного тиску та датчика температури загальмованого потоку повітря, а також забезпечення відмовостійкості шляхом реалізації схеми двоканальної системи управління гіростабілізатором з використанням інформації від датчиків кутів атаки і ковзання та датчиків кутів осей карданових підвісів приймача повітряного тиску та датчика температури загальмованого потоку повітря. Поставлена задача досягається тим, що в систему орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, згідно з корисною моделлю, введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по одному датчику кутів на осях підвісу скоби внутрішньої рами та зовнішньої рами, а на внутрішній рамі першого двовісного карданова підвісу закріплений корпус приймача повітряного тиску, на внутрішній рамі другого карданова підвісу закріплений корпус датчика температури загальмованого потоку повітря, дві індукційні сельсинні системи - перша в каналі кута атаки, друга в каналі кута ковзання, кожна з яких включає по три - перший, другий та третій, четвертий, п'ятий та шостий відповідно - сельсини з електрично зв'язаними обмотками роторів, чотири ідентичні слідкуючі системи - перша та друга в каналі кута атаки, третя та четверта в каналі кута ковзання, - кожна з яких вміщує підсилювач-перетворювач, електродвигун, два – перший та другий - механічні редуктори та пристрій формування вихідного сигналу, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні 1 UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 сигнали на осях підвісу флюгерних датчиків, перший, другий та третій фільтри нижніх частот, перший та другий компаратори, обчислювальний пристрій каналу кута атаки та перший підсилювач-перетворювач, четвертий, п'ятий та шостий фільтри нижніх частот, третій та четвертий компаратори, обчислювальний пристрій каналу кута ковзання та другий підсилювачперетворювач, блок формування вихідних електричних сигналів для кутів атаки та ковзання, причому вісь підвісу рами двовісного гіроскопічного стабілізатора механічно зв'язана з ротором першого сельсина першої індукційної сельсинної системи, вісь підвісу зовнішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором другого сельсина першої індукційної сельсинної системи, вісь підвісу зовнішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором третього сельсина першої індукційної сельсинної системи, вісь підвісу скоби платформи двовісного гіроскопічного стабілізатора механічно зв'язана з ротором четвертого сельсина другої індукційної сельсинної системи, вісь підвісу скоби внутрішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором п'ятого сельсина другої індукційної сельсинної системи, вісь підвісу скоби внутрішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором шостого сельсина другої індукційної сельсинної системи, вихідні точки обмоток роторів першого, другого, третього сельсинів першої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, вихідні точки обмоток роторів четвертого, п'ятого, шостого сельсинів другої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, на обмотки статорів першого сельсина першої індукційної сельсинної системи та четвертого сельсина другої індукційної сельсинної системи подана напруга з джерела живлення, обмотка статора другого сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача першої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів першої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу зовнішньої рами першого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу першої слідкуючої системи, вихід якого з'єднаний з першим входом блока формування вихідних електричних сигналів для кутів атаки і ковзання, обмотка статора третього сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача другої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів другої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу зовнішньої рами другого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу другої слідкуючої системи, вихід якого з'єднаний з другим входом блока формування вихідних електричних сигналів для кутів атаки та ковзання, обмотка статора п'ятого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача третьої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів третьої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу скоби внутрішньої рами першого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу третьої слідкуючої системи, вихід якого з'єднаний з третім входом блока формування вихідних електричних сигналів для кутів атаки та ковзання, обмотка статора шостого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювачаперетворювача четвертої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів четвертої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу скоби внутрішньої рами другого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу четвертої слідкуючої системи, вихід якого з'єднаний з четвертим входом блока формування вихідних електричних сигналів для кутів атаки і ковзання, вихід перетворювача кута атаки в електричний сигнал з'єднаний з входом першого фільтра нижніх частот, перший вихід якого сполучений з першим входом першого компаратора каналу кута атаки, вихід датчика кута на осі підвісу зовнішньої рами першого двовісного карданова підвісу з'єднаний з входом другого фільтра нижніх частот, вихід якого сполучений з другим входом першого компаратора каналу кута атаки, другий вихід першого фільтра нижніх частот каналу кута атаки з'єднаний з першим входом другого компаратора каналу кута атаки, вихід датчика кута на осі підвісу зовнішньої рами другого двовісного карданова підвісу сполучений з входом третього фільтра нижніх частот, вихід якого сполучений з другим входом другого компаратора каналу кута атаки, а виходи першого і другого компараторів каналу кута атаки з'єднані з першим і другим входами відповідно обчислювального пристрою каналу кута атаки, вихід якого з'єднаний з входом першого підсилювача-перетворювача, вихід якого поданий на 2 UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 вхід датчика моменту другого двоступеневого гіроскопа двовісного гіроскопічного стабілізатора, вихід перетворювача кута ковзання в електричний сигнал з'єднаний з входом четвертого фільтра нижніх частот, перший вихід якого сполучений з першим входом третього компаратора каналу кута ковзання, вихід датчика кута на осі підвісу скоби внутрішньої рами другого двовісного карданова підвісу з'єднаний з входом п'ятого фільтра нижніх частот, вихід якого сполучений з другим входом третього компаратора каналу кута ковзання, другий вихід четвертого фільтра нижніх частот каналу кута ковзання з'єднаний з першим входом четвертого компаратора каналу кута ковзання, вихід датчика кута на осі підвісу скоби внутрішньої рами першого двовісного карданова підвісу сполучений з входом шостого фільтра нижніх частот, вихід якого сполучений з другим входом четвертого компаратора каналу кута ковзання, а виходи третього і четвертого компараторів каналу кута ковзання з'єднані з першим і другим входами відповідно обчислювального пристрою каналу кута ковзання, вихід якого з'єднаний з входом другого підсилювача-перетворювача, вихід якого поданий на вхід датчика моменту першого двоступеневого гіроскопа двовісного гіроскопічного стабілізатора. Поставлена задача досягається також тим, що двовісний гіроскопічний стабілізатор містить платформу, скобу платформи, раму, перший та другий двоступеневі гіроскопи з взаємно ортогональними осями чутливості та датчиками кута та моменту на осях підвісу рам кожного гіроскопа, дві системи силової гіроскопічної стабілізації, перша з яких складається з першого двоступеневого гіроскопа, датчика кута на осі підвісу рами першого двоступеневого гіроскопа, третього підсилювача-перетворювача і датчика моменту на осі підвісу скоби платформи, причому вихід датчика кута на осі підвісу рами першого двоступеневого гіроскопа з'єднаний з входом третього підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту на осі підвісу скоби платформи, друга система силової гіроскопічної стабілізації складається з другого двоступеневого гіроскопа, датчика кута на осі підвісу рами другого двоступеневого гіроскопа, четвертого підсилювача-перетворювача і датчика моменту на осі підвісу рами, причому вихід датчика кута на осі підвісу рами двоступеневого гіроскопа з'єднаний з входом четвертого підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту на осі підвісу рами. На Фіг. наведена електро-кінематична схема відмовостійкої системи орієнтування датчиків повітряних параметрів. Відмовостійка система орієнтування датчиків повітряних параметрів містить двовісний гіроскопічний стабілізатор 1, перший 2 та другий 3 двовісні карданові підвіси, елементи яких за допомогою опор закріплені на корпусі 4. Перший двовісний кардановий підвіс 2 містить внутрішню раму 5, зв'язану зі скобою 6 внутрішньої рами, зовнішню раму 7, датчик кута 8 на осі підвісу зовнішньої рами 7 та датчик кута 9 на осі підвісу скоби 6 внутрішньої рами. На внутрішній рамі 5 першого двовісного карданова підвісу 2 закріплений корпус приймача повітряного тиску 10. Другий двовісний карданів підвіс 3 містить внутрішню раму 11, зв'язану зі скобою 12 внутрішньої рами, зовнішню раму 13, датчик кута 14 на осі підвісу зовнішньої рами 13 та датчик кута 15 на осі підвісу скоби 12 внутрішньої рами. На внутрішній рамі 11 другого двовісного карданова підвісу 3 закріплений корпус датчика температури 16 загальмованого потоку повітря. Перша індукційна сельсинна система включає перший сельсин 17, другий сельсин 18, третій сельсин 19 в каналі кута атаки. Друга індукційна сельсинна система включає четвертий сельсин 20, п'ятий сельсин 21, шостий сельсин 22 в каналі кута ковзання. В склад відмовостійкої системи орієнтування датчиків повітряних параметрів входять чотири ідентичні слідкуючі системи, кожна з яких вміщує: підсилювач-перетворювач 23, електродвигун 24, перший механічний редуктор 25, другий механічний редуктор 26, пристрій формування вихідного сигналу 27 - перша, підсилювач-перетворювач 28, електродвигун 29, перший механічний редуктор 30, другий механічний редуктор 31, пристрій формування вихідного сигналу 32 - друга, підсилювач-перетворювач 33, електродвигун 34, перший механічний редуктор 35, другий механічний редуктор 36, пристрій формування вихідного сигналу 37 - третя, підсилювач-перетворювач 38, електродвигун 39, перший механічний редуктор 40, другий механічний редуктор 41, пристрій формування вихідного сигналу 42 - четверта. Для отримання інформації про аеродинамічні кути використані флюгерний датчик кута атаки 43 з перетворювачем 44 кута атаки в електричний сигнал і флюгерний датчик кута ковзання 45 з перетворювачем 46 кута ковзання в електричний сигнал. Обробка вихідних сигналів з перетворювача 44 кута атаки в електричний сигнал та з датчиків кутів 8 і 14 здійснюється за допомогою фільтрів нижніх частот - першого 47, другого 48, третього 49 відповідно, а також - першого компаратора 50, другого компаратора 51, обчислювального пристрою 52 каналу кута атаки та першого підсилювача-перетворювача 53. Обробка вихідних сигналів з перетворювача 46 кута ковзання в електричний сигнал та з 3 UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 датчиків кутів 9 і 15 здійснюється за допомогою фільтрів нижніх частот - четвертого 54, шостого 55, п'ятого 56 відповідно, а також - третього компаратора 57, четвертого компаратора 58, обчислювального пристрою 59 каналу кута ковзання та другого підсилювача-перетворювача 60. Двовісний гіроскопічний стабілізатор 1 містить платформу 61, скобу 62 платформи, раму 63, перший двостепеневий гіроскоп 64, другий двостепеневий гіроскоп 65, датчик кута 66 та датчик моменту 67 на осі підвісу рами першого двоступеневого гіроскопа 64, датчик кута 68 та датчик моменту 69 на осі підвісу рами другого двоступеневого гіроскопа 65, дві системи силової гіроскопічної стабілізації. Перша з них складається з першого двоступеневого гіроскопа 64, датчика кута 66, третього підсилювача-перетворювача 70 і датчика моменту 71 на осі підвісу скоби 62 платформи 61. Друга система гіроскопічної стабілізації складається з другого двоступеневого гіроскопа 65, датчика кута 68, четвертого підсилювача-перетворювача 72 і датчика моменту 73 на осі підвісу рами 63. Вихід датчика кута 66 на осі підвісу рами першого двоступеневого гіроскопа 64 з'єднаний з входом третього підсилювача-перетворювача 70, вихід якого з'єднаний з входом датчика моменту 71 на осі підвісу скоби 62 платформи 61 гіроскопічного стабілізатора 1. Вихід датчика кута 68 на осі підвісу рами другого двоступеневого гіроскопа 65 з'єднаний з входом четвертого підсилювача-перетворювача 72, вихід якого з'єднаний з входом датчика моменту 73 на осі підвісу рами 6 гіроскопічного стабілізатора 1. На вхід 74 обмоток статорів сельсинів 17 і 20 подана напруга з джерела живлення. Вісь підвісу рами 63 двовісного гіроскопічного стабілізатора 1 механічно зв'язана з ротором першого сельсина 17 першої індукційної сельсинної системи, вісь підвісу зовнішньої рами 7 першого двовісного карданова підвісу 2 механічно зв'язана з ротором другого сельсина 18 першої індукційної сельсинної системи, вісь підвісу зовнішньої рами 13 другого двовісного карданова підвісу 3 механічно зв'язана з ротором третього сельсина 19 першої індукційної сельсинної системи. Вісь підвісу скоби 62 платформи 61 двовісного гіроскопічного стабілізатора 1 механічно зв'язана з ротором четвертого сельсина 20 другої індукційної сельсинної системи. Вісь підвісу скоби 6 внутрішньої рами 5 першого двовісного карданова підвісу 2 механічно зв'язана з ротором п'ятого сельсина 21 другої індукційної сельсинної системи. Вісь підвісу скоби 12 внутрішньої рами 11 другого двовісного карданова підвісу 3 механічно зв'язана з ротором шостого сельсина 22 другої індукційної сельсинної системи. Вихідні точки обмоток роторів першого 17, другого 18, третього 19 сельсинів першої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною. Вихідні точки обмоток роторів четвертого 20, п'ятого 21, шостого 22 сельсинів другої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною. Обмотка статора другого сельсина 18 першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача 23 першої слідкуючої системи, вихід якого поданий на вхід електродвигуна 24, вихідний вал якого сполучений з входами першого 25 та другого 26 механічних редукторів, вихід першого з яких (25) механічно зв'язаний з віссю підвісу зовнішньої рами 7 першого двовісного карданова підвісу 2, вихід другого механічного редуктора 26 зв'язаний з входом пристрою 27 формування вихідного сигналу першої слідкуючої системи. Вихід пристрою 27 з'єднаний з першим входом блока 75 формування вихідних електричних сигналів для кутів атаки і ковзання. Обмотка статора третього сельсина 19 першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача 28 другої слідкуючої системи, вихід якого поданий на вхід електродвигуна 29, вихідний вал якого сполучений з входами першого 30 та другого 31 механічних редукторів, вихід першого з яких механічно зв'язаний з віссю підвісу зовнішньої рами 13 другого двовісного карданова підвісу 3, вихід другого механічного редуктора 31 механічно зв'язаний з входом пристрою 32 формування вихідного сигналу другої слідкуючої системи. Вихід пристрою 32 з'єднаний з другим входом блока 75 формування вихідних електричних сигналів для кутів атаки і ковзання. Обмотка статора п'ятого сельсина 21 другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача 33 третьої слідкуючої системи, вихід якого поданий на вхід електродвигуна 34, вихідний вал якого сполучений з входами першого 35 та другого 36 механічних редукторів. Вихід першого редуктора 35 механічно зв'язаний з віссю підвісу скоби 6 внутрішньої рами 5 першого двовісного карданова підвісу 2, вихід другого механічного редуктора 36 механічно зв'язаний з входом пристрою 37 формування вихідного сигналу третьої слідкуючої системи. Вихід пристрою 37 з'єднаний з третім входом блока 75 формування вихідних електричних сигналів для кутів атаки і ковзання. Обмотка статора шостого сельсина 22 другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача 38 четвертої слідкуючої системи, вихід якого поданий на вхід електродвигуна 39, вихідний вал якого сполучений з входами першого 40 та другого 41 механічних редукторів четвертої слідкуючої системи. Вихід першого редуктора 40 механічно зв'язаний з віссю підвісу скоби 12 внутрішньої рами 11 другого двовісного карданова підвісу 3. 4 UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 Вихід другого редуктора 41 механічно зв'язаний з входом пристрою 42 формування вихідного сигналу четвертої слідкуючої системи. Вихід пристрою 42 з'єднаний з четвертим входом блока 75 формування вихідних електричних сигналів для кутів атаки і ковзання. Вихід перетворювача 44 кута атаки в електричний сигнал з'єднаний з входом першого фільтра нижніх частот 47, перший вихід якого сполучений з першим входом першого компаратора 50 каналу кута атаки. Вихід датчика кута 8 на осі підвісу зовнішньої рами 7 першого двовісного карданова підвісу 2 з'єднаний з входом другого фільтра нижніх частот 48, вихід якого сполучений з другим входом першого компаратора 50 каналу кута атаки. Другий вихід першого фільтра нижніх частот 47 каналу кута атаки з'єднаний з першим входом другого компаратора 51 каналу кута атаки. Вихід датчика кута 14 на осі підвісу зовнішньої рами 13 другого двовісного карданова підвісу 3 сполучений з входом третього фільтра нижніх частот 49. Вихід фільтра 49 з'єднаний з другим входом другого компаратора 51 каналу кута атаки. Виходи першого 50 і другого 51 компараторів каналу кута атаки з'єднані з першим і другим входами відповідно обчислювального пристрою 52 каналу кута атаки. Вихід обчислювального пристрою 52 з'єднаний з входом першого підсилювача-перетворювача 53, вихід якого поданий на вхід датчика моменту 69 другого двоступеневого гіроскопа 65 двовісного гіроскопічного стабілізатора 1. Вихід перетворювача 46 кута ковзання в електричний сигнал з'єднаний з входом четвертого фільтра нижніх частот 54, перший вихід якого сполучений з першим входом третього компаратора 57 каналу кута ковзання. Вихід датчика кута 15 на осі підвісу скоби 12 внутрішньої рами 11 другого двовісного карданова підвісу 3 з'єднаний з входом п'ятого фільтра нижніх частот 56, вихід якого сполучений з другим входом третього компаратора 57 каналу кута ковзання. Другий вихід четвертого фільтра нижніх частот 54 каналу кута ковзання з'єднаний з першим входом четвертого компаратора 58 каналу кута ковзання. Вихід датчика кута 9 на осі підвісу скоби 6 внутрішньої рами 5 першого двовісного карданова підвісу 2 сполучений з входом шостого фільтра нижніх частот 55, вихід якого з'єднаний з другим входом четвертого компаратора 58 каналу кута ковзання. Виходи третього 57 та четвертого 58 компараторів каналу кута ковзання з'єднані з першим і другим входами відповідно обчислювального пристрою 59 каналу кута ковзання, вихід якого з'єднаний з входом другого підсилювачаперетворювача 60, вихід якого поданий на вхід датчика моменту 67 першого двоступеневого 64 двовісного гіроскопічного стабілізатора 1. Приймач повітряного тиску 10 має пневматичні виходи 76 повного тиску та 77 статичного тиску відповідно, датчик температури 16 загальмованого потоку повітря має електричний вихід 78. Блок 75 формування вихідних електричних сигналів для кутів атаки і ковзання має електричні виходи 79 та 80 відповідно. Відмовостійка система орієнтування датчиків повітряних параметрів працює наступним чином. Задача системи в цілому - орієнтування приймача повітряного тиску 10 та датчика температури 16 загальмованого потоку повітря в просторі таким чином, щоб їх повздовжні осі в процесі руху корпуса 4 співпадали з вектором швидкості набігаючого потоку повітря. Це можливо реалізувати при наявності інформації про кути атаки і ковзання, які характеризують стан корпусу 4 в просторі відносно вектора швидкості набігаючого потоку повітря. В початковий момент часу приймач повітряного тиску 10 в першому двовісному кардановому підвісі 2 та датчик температури 15 загальмованого потоку повітря в другому двовісному кардановому підвісі 3 займають певне довільне положення відносно корпусу 4 і відносно вектора швидкості набігаючого потоку повітря. Кут відхилення флюгерного датчика 43 відносно осі підвісу зв'язаної з корпусом 4 системи координат OXYZ, є рівним куту атаки рухомого об'єкта. Тому різниця вихідних сигналів перетворювача 44 кута атаки в електричний сигнал і датчика кута 8 на осі підвісу зовнішньої рами 7 двовісного карданова підвісу 2 є сигналом неузгодженості положення приймача повітряного тиску 10 відносно осі OZ. Цей сигнал подається за допомогою фільтрів 47, 48 нижніх частот та першого компаратора 50. Різниця вихідних сигналів перетворювача 44 кута атаки в електричний сигнал і датчика кута 14 на осі підвісу зовнішньої рами 13 двовісного карданова підвісу 3 є сигналом неузгодженості положення датчика температури 16 загальмованого потоку повітря відносно осі OZ. Цей сигнал формується за допомогою фільтрів 47, 49 нижніх частот та другого компаратора 51. Сигнал управління формується за допомогою обчислювального пристрою 52 каналу кута атаки з використанням вихідних сигналів компараторів 50 і 51 у відповідності до спеціального алгоритму. При подачі напруги з джерела живлення на вхід 74 обмоток статорів сельсинів 17 і 20 має місце синхронізація кутових станів зовнішніх рам 7 та 13 першого 2 та другого 3 двовісних карданових підвісів відповідно!!!!!!!, що обумовлює рівність вихідних сигналів компараторів 50 і 51. Процес синхронізації кутових положень елементів 7, 13, 63 реалізується за 5 UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 допомогою першого 17, другого 18, третього 19 сельсинів та першої і другої слідкуючих систем каналу кута атаки. При наявності неузгодженості положення флюгерного датчика 43 кута атаки та рам 7 і 13 першого 2 і другого 3 двостепеневих карданових підвісів відповідно, а значить - флюгерного датчика 43 і рами 63 двовісного гіроскопічного стабілізатора 1 сигнал управління з виходу обчислювального пристрою 52 підсилюється і перетворюється за допомогою першого підсилювача-перетворювача 53 та подається на датчик моменту 69 другого двоступеневого гіроскопа 65. В результаті має місце прецесія рами 63 гіроскопічного стабілізатора 1 відносно осі її підвісу. Поворот рами 63 двовісного гіроскопічного стабілізатора 1 за допомогою першої індукційної сельсинної системи обумовлює поворот на певнийкут рами 7 першого 2 і рами 13 другого 3 двовісних карданових підвісів відповідно відносно осей підвісу вказаних рам. Сельсини 18 і 19 першої індукційної сельсинної системи працюють в трансформаторному режимі, тобто вихідні сигнали статорів сельсинів 18 і 19, пропорційні кутам неузгодженості роторів сельсина 17 та сельсинів 18 і 19, подаються на входи підсилювачів-перетворювачів 23 і 28 першої і другої слідкуючих систем відповідно каналу кута атаки. Вихідні сигнали управління підсилювачів-перетворювачів 23 і 28 подані на входи електродвигунів 24 і 29 першої і другої слідкуючих систем відповідно. Відпрацьовуючи сигнал управління електродвигун 24 за допомогою механічного редуктора 25 обертає ротор сельсина 18, а значить - раму 7 першого двовісного карданова підвісу 2 до кутового стану, який співпадає з кутовим станом ротора сельсина 17 або рами 63 двовісного гіроскопічного стабілізатора 1. Одночасно електродвигун 24 за допомогою механічного редуктора 26 діє на пристрій 27 формування вихідного сигналу в каналі кута атаки. Відпрацьовуючи сигнал управління, електродвигун 29 за допомогою механічного редуктора 30 обертає ротор сельсина 19, а значить - раму 13 другого двовісного карданова підвісу 3 до кутового стану, який співпадає з кутовим станом ротора сельсина 17 або рами 63 двовісного гіроскопічного стабілізатора 1. Одночасно електродвигун 29 за допомогою механічного редуктора 31 діє на пристрій 32 формування вихідного сигналу в каналі кута атаки. Таким чином, досягається синхронізація кутових станів флюгерного датчика 43 кута атаки, рами 63 двовісного гіроскопічного стабілізатора 1, зовнішніх рам 7 і 13 першого 2 і другого 3 двостепеневих карданових підвісів відповідно. Аналогічним чином працює система орієнтування датчиків повітряних параметрів в каналі кута ковзання. Кут відхилення флюгерного датчика 45 відносно осі підвісу флюгера, паралельної осі OY зв'язаної з корпусом 4 системи координат OXYZ, є рівним куту ковзання рухомого об'єкта. Тому різниця вихідних сигналів перетворювача 46 кута ковзання в електричний сигнал і датчика кута 15 на осі підвісу скоби 12 внутрішньої рами 11 другого двовісного карданова підвісу 3 є сигналом неузгодженості положення датчика температури 16 загальмованого потоку повітря відносно осі OY. Цей сигнал формується за допомогою фільтрів 54, 56 нижніх частот та третього компаратора 57. Різниця вихідних сигналів перетворювача 46 кута ковзання в електричний сигнал і датчика кута 9 на осі підвісу скоби 6 внутрішньої рами 5 двовісного карданова підвісу 2 є сигналом неузгодженості положення приймача повітряного тиску 10 відносно осі OY. Цей сигнал формується за допомогою фільтрів 54, 55 нижніх частот та четвертого компаратора 58. Сигнал управління формується за допомогою обчислювального пристрою 59 каналу кута ковзання з використанням вихідних сигналів компараторів 57 і 58 у відповідності до спеціального алгоритму. При подачі напруги з джерела живлення на вхід 74 обмоток статорів сельсинів 17 і 20 має місце синхронізація кутових станів скоб 6 та 12 внутрішніх рам 5 та 11 першого 2 та другого 3 двовісних карданових підвісів відповідно та скоби 62 платформи 61 двовісного гіроскопічного стабілізатора 1, що обумовлює рівність вихідних сигналів компараторів 57 і 58. Процес синхронізації кутових положень елементів 6 (5), 12 (11), 62 (61) реалізується за допомогою четвертого 20, п'ятого 21 та шостого 22 сельсинів та третьої і четвертої слідкуючих систем каналу кута ковзання. При наявності неузгодженості положення флюгерного датчика 45 кута ковзання та скоб 6 і 12 внутрішніх рам 5 і 11 першого 2 і другого 3 двостепеневих карданових підвісів відповідно, а значить - флюгерного датчика 45 і скоби 62 платформи 61 двовісного гіроскопічного стабілізатора 1 сигнал управління з виходу обчислювального пристрою 59 підсилюється і перетворюється за допомогою другого підсилювача-перетворювача 60 та подається на датчик моменту 67 першого двоступеневого гіроскопа 64. В результаті має місце прецесія платформи 61 і скоби 62 гіроскопічного стабілізатора 1 відповідно осі її підвісу. Поворот платформи 61 і скоби 62 двовісного гіроскопічного стабілізатора 1 за допомогою другої індукційної сельсинної системи обумовлює поворот на певний кут скоби 6 і внутрішньої рами 5 першого 2, скоби 12 і 6 UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 внутрішньої рами 11 другого 3 двовісних карданових підвісів відповідно відносно осей підвісу вказаних скоб. Сельсини 21 і 22 другої індукційної сельсинної системи працюють в трансформаторному режимі, тобто вихідні сигнали статорів сельсинів 21 і 22, пропорційні кутам неузгодженості роторів сельсина 20 та сельсинів 21 і 22, подаються на входи підсилювачів-перетворювачів 33 і 38 третьої і четвертої слідкуючих систем відповідно каналу кута ковзання. Вихідні сигнали управління підсилювачів-перетворювачів 33 і 38 подані на входи електродвигунів 34 і 39 третьої і четвертої слідкуючих систем відповідно. Відпрацьовуючи сигнал управління електродвигун 34 за допомогою механічного редуктора 35 обертає ротор сельсина 21, а значить - скобу 6 внутрішньої рами 5 першого двовісного карданова підвісу 2 до кутового стану, який співпадає з кутовим станом ротора сельсина 20 або скоби 62 платформи 61 двовісного гіроскопічного стабілізатора 1. Одночасно електродвигун 34 за допомогою механічного редуктора 36 діє на пристрій 37 формування вихідного сигналу в каналі кута ковзання. Відпрацьовуючи сигнал управління, електродвигун 39 за допомогою механічного редуктора 40 обертає ротор сельсина 22, а значить - скобу 12 внутрішньої рами 11 другого двовісного карданова підвісу 3 до кутового стану, який співпадає з кутовим станом ротора сельсина 20 або скоби 62 платформи 61 двовісного гіроскопічного стабілізатора 1. Одночасно електродвигун 39 за допомогою механічного редуктора 41 діє на пристрій 42 формування вихідного сигналу в каналі кута ковзання. Таким чином досягається синхронізація кутових станів флюгерного датчика 45 кута ковзання, скоби 62 платформи 61 двовісного гіроскопічного стабілізатора 1, скоби 6 внутрішньої рами 5 і скоби 12 внутрішньої рами 11 першого 2 і другого 3 двостепеневих карданових підвісів відповідно. Система синхронізації працює таким чином, що сигнали неузгодженості на виходах компараторів 50, 51, 57, 58 обох каналів спрямовані до нуля в сталому режимі, тобто приймач повітряного тиску 10 і датчик 16 температури загальмованого потоку повітря орієнтується вздовж вектора швидкості набігаючого потоку повітря. Дві ідентичні системи силової гіроскопічної стабілізації призначені для компенсації збурюючих моментів відносно осей підвісу платформи 61, скоби 62 та рами 63 гіроскопічного стабілізатора 1. Чутливими елементами систем стабілізації є двоступеневі гіроскопи - перший 64 (вісь чутливості паралельна осі OY) та другий 65 (вісь чутливості паралельна осі OZ). При виникненні збурюючого моменту відносно осі підвісу платформи 61 і скоби 62 має місце прецесія першого гіроскопа 64, з датчика кута 66 знімається вихідний сигнал, який подається на вхід третього підсилювача-перетворювача 70, а далі – на датчик моменту 71. Момент датчика 71, прикладений до осей підвісу платформи 61 та скоби 62, є рівним збурюючому моменту відносно цих осей, а його вектор направлений протилежно вектору збурюючого моменту. При виникненні збурюючого моменту відносно осі підвісу рами 63 має місце прецесія другого гіроскопа 65, з датчика кута 68 знімається вихідний сигнал, який подається на вхід четвертого підсилювача-перетворювача 72, а далі - на датчик моменту 73. Момент датчика 73, прикладений до осі підвісу рами 63, є рівним збурюючому моменту відносно цієї осі, а його вектор направлений протилежно вектору збурюючого моменту. Вихідні сигнали - 79, пропорційний куту атаки, і 80 - пропорційний куту ковзання, знімаються з блока 75 формування вихідних електричних сигналів. Алгоритм функціонування блока 75 передбачає спеціальну обробку інформації з пристроїв 27, 32, 37, 42 формування вихідних сигналів відповідних слідкуючих систем. Відмовостійкість системи орієнтування датчиків повітряних параметрів, що пропонується, визначається наступним. 1. В разі жорсткого закріплення приймача повітряного тиску та датчика температури загальмованого потоку повітря на корпусі рухомого об'єкта (прототип) припустимі похибки останніх відповідають значенням кутів атаки і ковзання рухомого об'єкта в межах ±15°. При збільшенні значень кутів атаки і ковзання, що є цілком природно для маневрених рухомих об'єктів, похибки приймача повітряного тиску і датчика температури загальмованого потоку повітря значно перевищують допустимі межі, що еквівалентно відмові цих пристроїв і, відповідно, вимірювальних комплексів, в які вони входять. В запропонованій системі кути атаки і ковзання рухомого об'єкта можуть змінюватися в межах +80°, що не викликає похибок датчиків повітряних параметрів і відповідних вимірювальних комплексів. 2. В системі, яка пропонується, з урахуванням принципу структурно-функціональної надлишковості реалізовані двоканальні системи управління гіростабілізатором з використанням інформації від датчиків кутів атаки і ковзання та датчиків кутів осей карданових підвісів приймача повітряного тиску та датчика температури загальмованого потоку повітря (елементи 44, 8, 14 в каналі кута атаки і 46, 9, 15 в каналі кута ковзання). При появі відмови одного з 7 UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 карданових підвісів чи одного з датчиків кутів на осях карданова підвісу роботоспроможність всієї системи орієнтування датчиків повітряних параметрів зберігається. Структурно-функціональна надлишковість в системі забезпечується також використанням спеціальних алгоритмів обробки інформації в обчислювальних пристроях 52 і 59. 3. В системі, яка пропонується, вихідна інформація про кути атаки і ковзання формується за допомогою блока 75, на який подаються вихідні сигнали з пристроїв 27, 32, 37, 42 формування сигналів відповідних слідкуючих систем. Алгоритм функціонування обчислювального пристрою блока 75 передбачає спеціальну обробку вхідної інформації. При появі відмови однієї зі слідкуючих систем чи будь-якого їх елемента інформація про кути атаки і ковзання на виходах 79 і 80 блока 75 зберігається. Таким чином, запропонована система дозволяє збільшити точність вимірювання повного та статичного тиску і температури загальмованого потоку повітря за рахунок введення відмовостійкої системи орієнтування датчиків повітряних параметрів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по одному датчику кутів на осях підвісу скоби внутрішньої рами та зовнішньої рами, а на внутрішній рамі першого двовісного карданова підвісу закріплений корпус приймача повітряного тиску, на внутрішній рамі другого карданова підвісу закріплений корпус датчика температури загальмованого потоку повітря, дві індукційні сельсинні системи - перша в каналі кута атаки, друга в каналі кута ковзання, кожна з яких включає по три - перший, другий та третій, четвертий, п'ятий та шостий відповідно - сельсини з електрично зв'язаними обмотками роторів, чотири ідентичні слідкуючі системи - перша та друга в каналі кута атаки, третя та четверта в каналі кута ковзання, - кожна з яких вміщує підсилювач-перетворювач, електродвигун, два - перший та другий - механічні редуктори та пристрій формування вихідного сигналу, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні сигнали на осях підвісу флюгерних датчиків, перший, другий та третій фільтри нижніх частот, перший та другий компаратори, обчислювальний пристрій каналу кута атаки та перший підсилювачперетворювач, четвертий, п'ятий та шостий фільтри нижніх частот, третій та четвертий компаратори, обчислювальний пристрій каналу кута ковзання та другий підсилювачперетворювач, блок формування вихідних електричних сигналів для кутів атаки та ковзання, причому вісь підвісу рами двовісного гіроскопічного стабілізатора механічно зв'язана з ротором першого сельсина першої індукційної сельсинної системи, вісь підвісу зовнішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором другого сельсина першої індукційної сельсинної системи, вісь підвісу зовнішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором третього сельсина першої індукційної сельсинної системи, вісь підвісу скоби платформи двовісного гіроскопічного стабілізатора механічно зв'язана з ротором четвертого сельсина другої індукційної сельсинної системи, вісь підвісу скоби внутрішньої рами першого двовісного карданова підвісу механічно зв'язана з ротором п'ятого сельсина другої індукційної сельсинної системи, вісь підвісу скоби внутрішньої рами другого двовісного карданова підвісу механічно зв'язана з ротором шостого сельсина другої індукційної сельсинної системи, вихідні точки обмоток роторів першого, другого, третього сельсинів першої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, вихідні точки обмоток роторів четвертого, п'ятого, шостого сельсинів другої індукційної сельсинної системи, які являють собою "зірку", електрично зв'язані одна з одною, на обмотки статорів першого сельсина першої індукційної сельсинної системи та четвертого сельсина другої індукційної сельсинної системи подана напруга з джерела живлення, обмотка статора другого сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача першої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів першої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу зовнішньої рами першого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу першої слідкуючої системи, вихід якого з'єднаний з першим входом блока формування вихідних електричних сигналів для кутів атаки і ковзання, обмотка статора третього сельсина першої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача другої 8 UA 68293 U 5 10 15 20 25 30 35 40 45 50 55 60 слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів другої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу зовнішньої рами другого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу другої слідкуючої системи, вихід якого з'єднаний з другим входом блока формування вихідних електричних сигналів для кутів атаки та ковзання, обмотка статора п'ятого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювача-перетворювача третьої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів третьої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу скоби внутрішньої рами першого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу третьої слідкуючої системи, вихід якого з'єднаний з третім входом блока формування вихідних електричних сигналів для кутів атаки та ковзання, обмотка статора шостого сельсина другої індукційної сельсинної системи з'єднана з входом підсилювачаперетворювача четвертої слідкуючої системи, вихід якого поданий на вхід електродвигуна, вихідний вал якого сполучений з входами першого та другого механічних редукторів четвертої слідкуючої системи, вихід першого з яких механічно зв'язаний з віссю підвісу скоби внутрішньої рами другого двовісного карданова підвісу, вихід другого - механічно зв'язаний з входом пристрою формування вихідного сигналу четвертої слідкуючої системи, вихід якого з'єднаний з четвертим входом блока формування вихідних електричних сигналів для кутів атаки і ковзання, вихід перетворювача кута атаки в електричний сигнал з'єднаний з входом першого фільтра нижніх частот, перший вихід якого сполучений з першим входом першого компаратора каналу кута атаки, вихід датчика кута на осі підвісу зовнішньої рами першого двовісного карданова підвісу з'єднаний з входом другого фільтра нижніх частот, вихід якого сполучений з другим входом першого компаратора каналу кута атаки, другий вихід першого фільтра нижніх частот каналу кута атаки з'єднаний з першим входом другого компаратора каналу кута атаки, вихід датчика кута на осі підвісу зовнішньої рами другого двовісного карданова підвісу сполучений з входом третього фільтра нижніх частот, вихід якого сполучений з другим входом другого компаратора каналу кута атаки, а виходи першого і другого компараторів каналу кута атаки з'єднані з першим і другим входами відповідно обчислювального пристрою каналу кута атаки, вихід якого з'єднаний з входом першого підсилювача-перетворювача, вихід якого поданий на вхід датчика моменту другого двоступеневого гіроскопа двовісного гіроскопічного стабілізатора, вихід перетворювача кута ковзання в електричний сигнал з'єднаний з входом четвертого фільтра нижніх частот, перший вихід якого сполучений з першим входом третього компаратора каналу кута ковзання, вихід датчика кута на осі підвісу скоби внутрішньої рами другого двовісного карданова підвісу з'єднаний з входом п'ятого фільтра нижніх частот, вихід якого сполучений з другим входом третього компаратора каналу кута ковзання, другий вихід четвертого фільтра нижніх частот каналу кута ковзання з'єднаний з першим входом четвертого компаратора каналу кута ковзання, вихід датчика кута на осі підвісу скоби внутрішньої рами першого двовісного карданова підвісу сполучений з входом шостого фільтра нижніх частот, вихід якого сполучений з другим входом четвертого компаратора каналу кута ковзання, а виходи третього і четвертого компараторів каналу кута ковзання з'єднані з першим і другим входами відповідно обчислювального пристрою каналу кута ковзання, вихід якого з'єднаний з входом другого підсилювача-перетворювача, вихід якого поданий на вхід датчика моменту першого двоступеневого гіроскопа двовісного гіроскопічного стабілізатора. 2. Відмовостійка система орієнтування датчиків повітряних параметрів за п. 1, яка відрізняється тим, що двовісний гіроскопічний стабілізатор містить платформу, скобу платформи, раму, перший та другий двоступеневі гіроскопи з взаємно ортогональними осями чутливості та датчиками кута та моменту на осях підвісу рам кожного гіроскопа, дві системи силової гіроскопічної стабілізації, перша з яких складається з першого двоступеневого гіроскопа, датчика кута на осі підвісу рами першого двоступеневого гіроскопа, третього підсилювача-перетворювача і датчика моменту на осі підвісу скоби платформи, причому вихід датчика кута на осі підвісу рами першого двоступеневого гіроскопа з'єднаний з входом третього підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту на осі підвісу скоби платформи, друга система силової гіроскопічної стабілізації складається з другого двоступеневого гіроскопа, датчика кута на осі підвісу рами другого двоступеневого гіроскопа, четвертого підсилювача-перетворювача і датчика моменту на осі підвісу рами, причому вихід датчика кута на осі підвісу рами двоступеневого гіроскопа з'єднаний з входом четвертого підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту на осі підвісу рами. 9 UA 68293 U Комп’ютерна верстка Н. Лисенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюFailure-resistant system for orientation of sensors of air parameters
Автори англійськоюHordin Oleksandr Hryhorovych, Havrylenko Iryna Volodymyrivna
Назва патенту російськоюОтказоустойчивая система ориентирования датчиков воздушных параметров
Автори російськоюГордин Александр Григорьевич, Гавриленко Ирина Владимировна
МПК / Мітки
МПК: G01P 5/14
Мітки: система, орієнтування, параметрів, датчиків, повітряних, відмовостійка
Код посилання
<a href="https://ua.patents.su/12-68293-vidmovostijjka-sistema-oriehntuvannya-datchikiv-povitryanikh-parametriv.html" target="_blank" rel="follow" title="База патентів України">Відмовостійка система орієнтування датчиків повітряних параметрів</a>
Відмовостійка система орієнтування датчиків повітряних параметрів

Номер патенту: 62526
Опубліковано: 25.08.2011
Автори: Гавриленко Ірина Володимирівна, Гордін Олександр Григорович
МПК: G01P 5/14
Мітки: повітряних, датчиків, параметрів, відмовостійка, система, орієнтування
Формула / Реферат:
1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по...
Система орієнтування приймача повітряного тиску
Номер патенту: 56886
Опубліковано: 25.01.2011
Автори: Кописов Олег Едуардович, Гордін Олександр Григорович, Сушко Олексій Володимирович
МПК: G01P 13/00, G01P 5/14
Мітки: система, орієнтування, тиску, приймача, повітряного
Формула / Реферат:
1. Система орієнтування приймача повітряного тиску, що містить закріплений на корпусі літального апарата приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, двовісний підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на...
Система орієнтування приймача температури загальмованого потоку повітря

Номер патенту: 58995
Опубліковано: 26.04.2011
Автори: Гордін Олександр Григорович, Гавриленко Ірина Володимирівна
МПК: G01P 5/14
Мітки: орієнтування, приймача, загальмованого, потоку, температури, система, повітря
Формула / Реферат:
1. Система орієнтування приймача температури загальмованого потоку повітря, що містить закріплений на поверхні літального апарата корпус приймача температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, двовісний кардановий підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на внутрішній рамі двовісного карданового підвісу закріплений...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Симонов Володимир Федорович, Бойко Євгенія Анатоліївна
МПК: G05D 1/03
Мітки: відмовостійка, літального, стабілізації, кутової, безпілотного, система, апарата
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Відмовостійка система керування боковим рухом безпілотного літального апарата

Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Бандура Іван Миколайович, Амеліна Ірина Вікторівна, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: керування, боковим, система, безпілотного, рухом, відмовостійка, апарата, літального
Формула / Реферат:
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання,...
Попередній патент: Спосіб виробництва кисломолочного сиру “домашній духмяний”
Наступний патент: Спосіб одержання асиметричних діестерів адипінової кислоти
Випадковий патент: Апарат для охолодження конвертерних газів з одержанням гарячого та холодного м'якообпаленого вапна