Система орієнтування приймача повітряного тиску
Номер патенту: 56886
Опубліковано: 25.01.2011
Автори: Кописов Олег Едуардович, Сушко Олексій Володимирович, Гордін Олександр Григорович
Формула / Реферат
1. Система орієнтування приймача повітряного тиску, що містить закріплений на корпусі літального апарата приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, двовісний підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на внутрішній рамі двовісного карданового підвісу закріплений приймач повітряного тиску, на кожній осі двовісного карданового підвісу розміщені по два датчики кута, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні сигнали на осях підвісу флюгерних датчиків, компаратор та перетворювач-підсилювач каналу кута атаки, компаратор та перетворювач-підсилювач каналу кута ковзання, блок формування вихідних електричних сигналів для кута атаки та кута ковзання, причому скоба платформи і рама двовісного гіроскопічного стабілізатора механічно зв'язані за допомогою восьми шарнірів та чотирьох жорстких тяг зі скобою внутрішньої рами та зовнішньою рамою відповідно двовісного карданового підвісу приймача повітряного тиску, виходи перетворювача кута атаки в електричний сигнал та першого датчика кута на осі підвісу зовнішньої рами з'єднані з входом компаратора каналу кута атаки, вихід якого з'єднаний з входом перетворювача-підсилювача каналу кута атаки, вихід якого з'єднаний з входом датчика моменту другого двоступеневого гіроскопа гіроскопічного стабілізатора, виходи перетворювача кута ковзання в електричний сигнал та першого датчика кута на осі підвісу скоби внутрішньої рами карданового підвісу приймача повітряного тиску з'єднані з входом компаратора каналу кута ковзання, вихід якого з'єднаний з входом перетворювача-підсилювача каналу кута ковзання, вихід якого з'єднаний з входом датчика моменту першого двоступеневого гіроскопа гіроскопічного стабілізатора, виходи другого датчика кута на осі підвісу внутрішньої рами та другого датчика кута на осі підвісу зовнішньої рами карданового підвісу приймача повітряного тиску з'єднані з входами блока формування вихідних електричних сигналів для кута атаки та кута ковзання.
2. Система орієнтування приймача повітряного тиску відповідно до п. 1, яка відрізняється тим, що двовісний гіроскопічний стабілізатор містить платформу, раму, скобу платформи, перший і другий двоступеневі гіроскопи з взаємно ортогональними осями чутливості та датчиками кута та моменту на осях підвісу кожного гіроскопа, дві системи силової гіроскопічної стабілізації, перша з яких складається з першого двоступеневого гіроскопа, датчика кута на осі підвісу першого двоступеневого гіроскопа, підсилювача-перетворювача і датчика моменту на осі підвісу скоби платформи, причому вихід датчика кута першого двоступеневого гіроскопа з'єднаний з входом підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту на осі підвісу скоби платформи, друга система силової гіроскопічної стабілізації складається з другого двоступеневого гіроскопа, датчика кута на осі підвісу другого двоступеневого гіроскопа, підсилювача-перетворювача і датчика моменту на осі підвісу рами, причому вихід датчика кута другого двоступеневого гіроскопа з'єднаний з входом підсилювача-перетворювача, вихід якого з'єднаний з входом датчика моменту на осі підвісу рами.
Текст
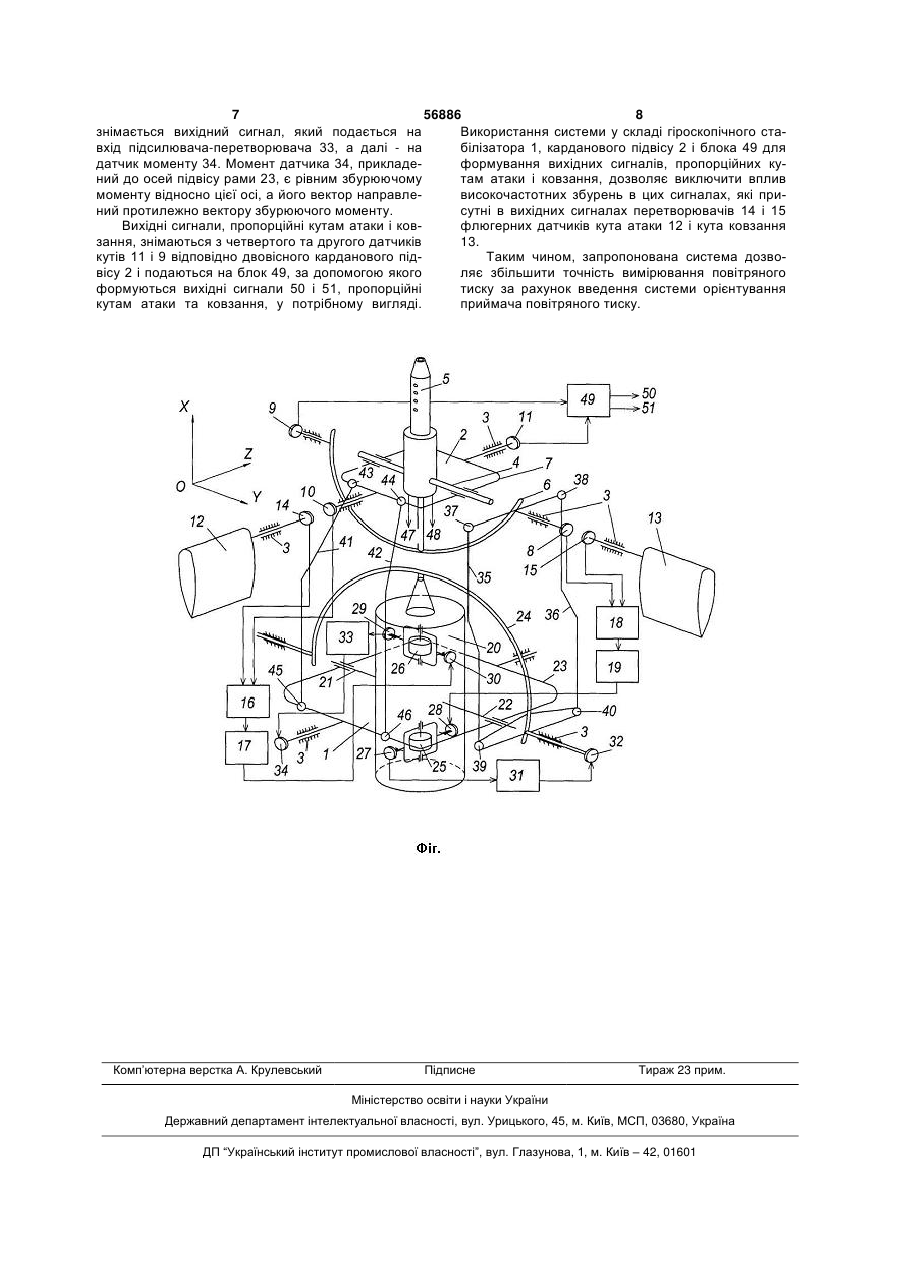
1. Система орієнтування приймача повітряного тиску, що містить закріплений на корпусі літального апарата приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, двовісний підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на внутрішній рамі двовісного карданового підвісу закріплений приймач повітряного тиску, на кожній осі двовісного карданового підвісу розміщені по два датчики кута, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні сигнали на осях підвісу флюгерних датчиків, компаратор та перетворювач-підсилювач каналу кута атаки, компаратор та перетворювач-підсилювач каналу кута ковзання, блок формування вихідних електричних сигналів для кута атаки та кута ковзання, причому скоба платформи і рама двовісного гіроскопічного стабілізатора механічно зв'язані за допомогою восьми шарнірів та чотирьох жорстких тяг зі скобою внутрішньої рами та зовнішньою рамою відповідно двовісного карданового підвісу приймача повітряного тиску, виходи перетворювача кута атаки в електричний сигнал та першого датчика кута на осі підвісу зовнішньої рами з'єднані з входом компаратора каналу кута атаки, вихід якого з'єднаний з входом перетворювачапідсилювача каналу кута атаки, вихід якого з'єднаний з входом датчика моменту другого двоступе U 2 (19) 1 3 56886 4 апаратів. зовнішньої рами карданового підвісу приймача Відомий найбільш близький та вибраний в повітряного тиску з'єднані з входами блоку формуякості прототипу вимірювач повітряного тиску [Бовання вихідних електричних сигналів для кута атаднер В.А. Авиационные приборы. М.: Машиностки та кута ковзання. роение, 1969, с. 326-330. Браславский Д.А., ЛогуПоставлена задача досягається також тим, що нов С.С, Пельпор Д.С. Авиационные приборы и двовісний гіроскопічний стабілізатор містить платавтоматы. М.: Машиностроение, 1978, с. 180-182. форму, раму, скобу платформи, перший і другий Браславский Д.А. Приборы и датчики летательных двоступеневі гіроскопи з взаємно ортогональними аппаратов. М.: Машиностроение, 1970, с. 293, 306, осями чутливості та датчиками кута та моменту на 307, 318-322], який містить закріплений на корпусі осях підвісу кожного гіроскопа, дві системи силової літального апарату приймач повітряного тиску, в гіроскопічної стабілізації, перша з яких складаєтьносовій частині якого виконаний отвір для визнася з першого двоступеневого гіроскопа, датчика чення повного тиску, збоку знаходяться отвори кута на осі підвісу першого двоступеневого гіросдля визначення статичного тиску. копа, підсилювача-перетворювача і датчика момеНедоліками цього вимірювача є значні похибки нту на осі підвісу скоби платформи, причому вихід вимірювання статичного та повного повітряного датчика кута першого двоступеневого гіроскопа тиску при польоті з великими кутами атаки і ковз'єднаний з входом підсилювача-перетворювача, зання. вихід якого з'єднаний з входом датчика моменту Задачею корисної моделі є збільшення точнона осі підвісу скоби платформи, друга система сті вимірювання повітряного тиску за рахунок ввесилової гіроскопічної стабілізації складається з дення системи орієнтування приймача повітряного другого двоступеневого гіроскопа, датчика кута на тиску. осі підвісу другого двоступеневого гіроскопа, підПоставлена задача досягається тим, що в сиссилювача-перетворювача і датчика моменту на осі тему орієнтування приймача повітряного тиску, що підвісу рами, причому вихід датчика кута другого містить закріплений на корпусі літального апарату двоступеневого гіроскопа з'єднаний з входом підприймач повітряного тиску, в носовій частині якого силювача-перетворювача, вихід якого з'єднаний з виконаний отвір для визначення повного тиску, входом датчика моменту на осі підвісу рами. збоку знаходяться отвори для визначення статичНа фіг. наведена структурно-кінематична схеного тиску, згідно з корисною моделлю, введені ма системи орієнтування приймача повітряного двовісний гіроскопічний стабілізатор, двовісний тиску. підвіс, який містить внутрішню раму, зв'язану зі Система орієнтування приймача повітряного скобою внутрішньої рами, та зовнішню раму, а на тиску містить двовісний гіроскопічний стабілізатор внутрішній рамі двовісного карданового підвісу 1 та двовісний кардановий підвіс 2, елементи яких закріплений приймач повітряного тиску, на кожній за допомогою опор закріплені на корпусі 3. Двовісосі двовісного карданового підвісу розміщені по ний кардановий підвіс 2 містить внутрішню раму 4, два датчика кута, флюгерні датчики кута атаки та на якій закріплений приймач повітряного тиску 5, кута ковзання з перетворювачами кутів атаки та скобу 6 внутрішньої рами 4 та зовнішню раму 7. На ковзання в електричні сигнали на осях підвісу осі підвісу внутрішньої рами 4 двовісного карданофлюгерних датчиків, компаратор та перетворювого підвісу 2 розміщені перший датчик кута 8 та вач-підсилювач каналу кута атаки, компаратор та другий датчик кута 9, на осі підвісу зовнішньої раперетворювач-підсилювач каналу кута ковзання, ми 7 двовісного карданового підвісу 2 розміщені блок формування вихідних електричних сигналів третій датчик кута 10 та четвертий датчик кута 11. для кута атаки та кута ковзання, причому скоба На корпусі 3 за допомогою опор розміщені платформи і рама двовісного гіроскопічного стабіфлюгерний датчик 12 кута атаки та флюгерний лізатора механічно зв'язані за допомогою восьми датчик 13 кута ковзання, а на осях підвісу цих датшарнірів та чотирьох жорстких тяг зі скобою внутчиків розміщені відповідно перетворювач 14 кута рішньої рами та зовнішньою рамою відповідно атаки в електричний сигнал та перетворювач 15 двовісного карданового підвісу приймача повітрякута ковзання в електричний сигнал. Для обробки ного тиску, виходи перетворювача кута атаки в інформації з третього датчика кута 10 та перетвоелектричний сигнал та першого датчика кута на осі рювача кута атаки в електричний сигнал 14 викопідвісу зовнішньої рами з'єднані з входом компаристані компаратор 16 та перетворювачратора каналу кута атаки, вихід якого з'єднаний з підсилювач 17 каналу кута атаки, а з третього датвходом перетворювача-підсилювача каналу кута чика кута 8 та перетворювача кута ковзання в елеатаки, вихід якого з'єднаний з входом датчика моктричний сигнал 15 - компаратор 18 та перетворюменту другого двоступеневого гіроскопа гіроскопівач-підсилювач 19 каналу кута ковзання. чного стабілізатора, виходи перетворювача кута Двовісний гіроскопічний стабілізатор 1 містить ковзання в електричний сигнал та першого датчиплатформу 20, розміщену за допомогою осей 21 і ка кута на осі підвісу скоби внутрішньої рами кар22 в рамі 23, яка в свою чергу підвішена в корпусі данового підвісу приймача повітряного тиску з'єд3. Платформа 20 кінематично зв'язана зі скобою нані з входом компаратора каналу кута ковзання, 24 платформи, шарнірно закріпленою в корпусі 3. вихід якого з'єднаний з входом перетворювачаУ середині платформи 20 розміщені перший двоспідсилювача каналу кута ковзання, вихід якого тупеневий гіроскоп 25 та другий двоступеневий з'єднаний з входом датчика моменту першого двогіроскоп 26 із взаємно ортогональними осями чутступеневого гіроскопа гіроскопічного стабілізатора, ливості. Вісь чутливості першого двоступеневого виходи другого датчика кута на осі підвісу внутрігіроскопа 26 паралельна осі підвісу рами 23. На осі шньої рами та другого датчика кута на осі підвісу підвісу першого двоступеневого гіроскопа 25 роз 5 56886 6 міщені датчик кута 27 та датчик моменту 28; на осі 10 зовнішньої рами 7 двовісного підвісу 2 є сигнал підвісу другого двоступеневого гіроскопа 26 рознеузгодженості положення приймача повітряного міщені датчик кута 29 та датчик моменту 30. Двотиску 5 відносно осі OZ. Цей сигнал формується за вісний гіроскопічний стабілізатор 1 містить дві сисдопомогою компаратора 16, перетворюється та теми силової гіроскопічної стабілізації. Перша з підсилюється за допомогою перетворювачаних складається з першого двоступеневого гіроспідсилювача 17 і подається на датчик моменту 30 копа 25, датчика кута 27, підсилювачадругого двоступеневого гіроскопа 26. В результаті перетворювача 31 і датчика моменту 32 на осі має місце прецесія рами 23 гіроскопічного стабіліпідвісу скоби 24 платформи 20. Друга система затора 1 відносно осі її підвісу. Поворот рами 23 за силової гіроскопічної стабілізації складається з допомогою жорстких тяг 41, 42 та шарнірів 43, 44, другого двоступеневого гіроскопа 26, датчика кута 45, 46 обумовлює поворот рами 7 двовісного кар29, підсилювача-перетворювача 33 і датчика моданового підвісу 2 приймача повітряного тиску 5. менту 34 на осі підвісу рами 23. В кожній системі Система працює таким чином, що сигнал неузгосилової гіроскопічної стабілізації виходи датчиків дженості на вході компаратора 16 наближається кута 27, 29 з'єднані з входами підсилювачівдо нуля, тобто приймач повітряного тиску 5 орієнперетворювачів 31, 33, виходи яких з'єднані з відтується вздовж вектора швидкості набігаючого повідними датчиками моментів: 32 в системі стабіпотоку повітря в площині XOY зв'язаної з корпусом лізації платформи 20 та 34 в системі стабілізації 3 системи координат OXYZ. рами 23. Скоба 6 внутрішньої рами 4 двовісного Аналогічним чином працює система в каналі карданового підвісу 2 механічно зв'язана зі скобою кута ковзання. Кут відхилення флюгерного датчика 24 платформи 20 двовісного гіроскопічного стабі13 відносно осі OY зв'язаної з корпусом 3 системи лізатора 1 за допомогою двох жорстких тяг 35, 36 координат OXYZ є пропорційним куту ковзання. та чотирьох шарнірів 37, 38, 39, 40. Зовнішня рама Різниця вихідних сигналів перетворювача 15 кута 7 двовісного карданового підвісу 2 механічно зв'яковзання в електричний сигнал і першого датчика зана з рамою 23 двовісного гіроскопічного стабілікута 8 скоби 6 внутрішньої рами 4 двовісного карзатора 1 за допомогою двох жорстких тяг 41, 42 та данового підвісу 2 є сигнал неузгодженості полочотирьох шарнірів 43, 44, 45, 46. ження приймача повітряного тиску 5 відносно осі Виходи датчика кута 10 та перетворювача 14 OY. Цей сигнал формується за допомогою переткута атаки в електричний сигнал подані на вхід ворювача-підсилювача 19 і подається на датчик компаратора 16, вихід якого з'єднаний з входом моменту 28 першого двоступеневого гіроскопа 25. перетворювача-підсилювача 17, а вихідний сигнал В результаті з'являється прецесія платформи 20 і цього блока подається на датчик моменту 30 друскоби 24 гіроскопічного стабілізатора 1 відносно гого двоступеневого гіроскопа 26. Виходи першого осі їх підвісу. Поворот скоби 24 за допомогою жордатчика кута 8 та перетворювача 15 кута ковзання стких тяг 35, 36 та шарнірів 37, 38, 39, 40 обумовв електричний сигнал подаються на вхід компаралює поворот скоби 6 та внутрішньої рами 4 двовітора 18, вихід якого з'єднаний з входом перетвосного карданового підвісу 2 приймача повітряного рювача-підсилювача 19, а вихідний сигнал цього тиску 5. При цьому поворот внутрішньої рами 4 блока подається на датчик моменту 28 першого здійснюється в такому напрямку, що сигнал недвоступеневого гіроскопа 25. узгодженості на вході компаратора 18 наближаПриймач повітряного тиску 5 має пневматичні ється до нуля, тобто приймач повітряного тиску 5 виходи 47 і 48 повного і статичного тиску відповідорієнтується вздовж вектора швидкості набігаючоно. Для формування вихідних сигналів, пропорційго потоку повітря в площині XOZ зв'язаної з корпуних кутам атаки і ковзання, служить блок 49, на сом 3 системи координат OXYZ. входи якого подаються вихідні сигнали з датчиків Спільна робота системи в каналах кутів атаки і кутів 9 і 11 двовісного карданового підвісу 2. Вихіковзання обумовлює орієнтацію повздовжньої осі дні сигнали 50, 51 блока 49 пропорційні кутам атаприймача повітряного тиску 5 вздовж вектора ки і ковзання відповідно. швидкості набігаючого потоку повітря. Система орієнтування приймача повітряного Дві ідентичні системи силової гіроскопічної тиску працює наступним чином. Задача системи в стабілізації призначені для компенсації збурюючих цілому - орієнтування приймача повітряного тиску моментів відносно осей підвісу платформи 20, 5 в просторі, щоб його повздовжня вісь в процесі скоби 24 та рами 23 гіроскопічного стабілізатора 1. руху корпуса 3 співпадала з вектором швидкості Чутливими елементами цих систем є двоступеневі набігаючого потоку повітря. Це можливо реалізугіроскопи - перший 25 (вісь чутливості паралельна вати при наявності інформації про кути атаки і ковосі OY) та другий 26 (вісь чутливості паралельна зання, які характеризують стан корпусу 3 в прососі OZ). При виникненні збурюючого моменту відторі відносно вектора швидкості набігаючого носно осей підвісу платформи 20 і скоби 24 винипотоку повітря. кає прецесія першого гіроскопа 25, з датчика кута В початковий момент часу приймач повітряно27 знімається вихідний сигнал, який подається на го тиску 5 в двовісному кардановому підвісі 2 завхід підсилювача-перетворювача 31, а далі - на ймає певне довільне положення і відносно корпусу датчик моменту 32. Момент датчика 32, прикладе3, і відносно вектора швидкості набігаючого потоку ний до осей підвісу платформи 20 та скоби 24, є повітря. Кут відхилення флюгерного датчика 12 рівним збурюючому моменту відносно цих осей, а відносно осі OZ зв'язаної з корпусом 3 системи його вектор направлений протилежно вектору збукоординат OXYZ є пропорційним куту атаки. Тому рюючого моменту. При виникненні збурюючого різниця вихідних сигналів перетворювача 14 кута моменту відносно осей підвісу рами 23 виникає атаки в електричний сигнал і третього датчика кута прецесія другого гіроскопа 26, з датчика кута 29 7 56886 8 знімається вихідний сигнал, який подається на Використання системи у складі гіроскопічного ставхід підсилювача-перетворювача 33, а далі - на білізатора 1, карданового підвісу 2 і блока 49 для датчик моменту 34. Момент датчика 34, прикладеформування вихідних сигналів, пропорційних куний до осей підвісу рами 23, є рівним збурюючому там атаки і ковзання, дозволяє виключити вплив моменту відносно цієї осі, а його вектор направлевисокочастотних збурень в цих сигналах, які приний протилежно вектору збурюючого моменту. сутні в вихідних сигналах перетворювачів 14 і 15 Вихідні сигнали, пропорційні кутам атаки і ковфлюгерних датчиків кута атаки 12 і кута ковзання зання, знімаються з четвертого та другого датчиків 13. кутів 11 і 9 відповідно двовісного карданового підТаким чином, запропонована система дозвовісу 2 і подаються на блок 49, за допомогою якого ляє збільшити точність вимірювання повітряного формуються вихідні сигнали 50 і 51, пропорційні тиску за рахунок введення системи орієнтування кутам атаки та ковзання, у потрібному вигляді. приймача повітряного тиску. Комп’ютерна верстка А. Крулевський Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for orientation of receiver of air pressure
Автори англійськоюHordin Oleksandr Hryhorovych, Sushko Oleksii Volodymyrovych, Kopysov Oleh Eduardovych
Назва патенту російськоюСистема ориентирования приемника воздушного давления
Автори російськоюГордин Александр Григорьевич, Сушко Алексей Владимирович, Кописов Олег Эдуардович
МПК / Мітки
МПК: G01P 13/00, G01P 5/14
Мітки: тиску, повітряного, система, приймача, орієнтування
Код посилання
<a href="https://ua.patents.su/4-56886-sistema-oriehntuvannya-prijjmacha-povitryanogo-tisku.html" target="_blank" rel="follow" title="База патентів України">Система орієнтування приймача повітряного тиску</a>
Спосіб контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата при наземних випробуваннях
Номер патенту: 59451
Опубліковано: 15.09.2003
Автори: Порубайміх Володимир Ілліч, Лепескин Ігор Борисович, Кулігін Анатолій Михайлович, Гладка Інна Володимирівна, Дупліщева Ольга Михайлівна
МПК: G01L 27/00, G01C 5/00
Мітки: контролю, випробуваннях, статичного, апарата, тиску, спосіб, наземних, літального, приймача, реле, спрацьовування, блока
Формула / Реферат:
Спосіб контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата при наземних випробуваннях, який полягає в тому, що встановлюють блок реле тиску в робочу камеру, оснащену системою створення вакууму, поступово знижують тиск у робочій камері і фіксують момент спрацьовування блока реле тиску, який відрізняється тим, що нагрівають корпус приймача статичного тиску до заданої температури, підтримують цю температуру в...
Спосіб контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата при наземних випробуваннях
Номер патенту: 58600
Опубліковано: 15.08.2003
Автори: Кулігін Анатолій Михайлович, Дупліщева Ольга Михайлівна, Порубайміх Володимир Ілліч, Лепескин Ігор Борисович, Гладка Інна Володимирівна
МПК: G01L 27/00, G01M 9/00
Мітки: апарата, контролю, реле, літального, наземних, спрацьовування, блока, тиску, статичного, випробуваннях, спосіб, приймача
Формула / Реферат:
Спосіб контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата при наземних випробуваннях, що міститься в тому, що встановлюють блок реле тиску в робочу камеру, оснащену системами створення вакууму і подання в неї повітря високого тиску, поступово збільшують тиск у робочій камері і фіксують момент спрацьовування блока реле тиску, який відрізняється тим, що відтворюють у робочій камері тиск, який дорівнює...
Пристрій для контролю спрацьовування блокa реле тиску приймача статичного тиску літального апарата на висхідній гілці траєкторії при наземних випробуваннях
Номер патенту: 75677
Опубліковано: 15.05.2006
Автори: Дупліщева Ольга Михайлівна, Порубаймех Володимир Ілліч, Лепескин Ігор Борисович, Кулігін Анатолій Михайлович
МПК: G01L 27/00, G01C 5/00
Мітки: гілці, тиску, апарата, приймача, спрацьовування, літального, статичного, контролю, траєкторії, пристрій, випробуваннях, наземних, блока, висхідній, реле
Формула / Реферат:
Пристрій для контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата на висхідній гілці траєкторії польоту при наземних випробуваннях, який містить робочу камеру, вакуумметр, приймач статичного тиску й випробовуваний блок реле тиску, який відрізняється тим, що в ньому приймач статичного тиску містить електричний нагрівник, виконаний як ізольована від корпусу приймача статичного тиску спіраль, розташована навколо...
Пристрій для контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата на спадній гілці траєкторії польоту при наземних випробуваннях
Номер патенту: 80686
Опубліковано: 25.10.2007
Автори: Лепескин Ігор Борисович, Порубаймех Володимир Ілліч, Кулігін Анатолій Михайлович, Дупліщева Ольга Михайлівна
МПК: G01L 27/00, G01C 5/00, G01M 9/00
Мітки: реле, тиску, наземних, контролю, апарата, пристрій, спрацьовування, літального, приймача, блока, траєкторії, гілці, спадній, статичного, польоту, випробуваннях
Формула / Реферат:
Пристрій для контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата на спадній гілці траєкторії польоту при наземних випробуваннях, який містить робочу камеру, що має вакуумметр, приймач статичного тиску, випробуваний блок реле тиску, електричний нагрівник, що встановлено у вигляді спіралі, яка ізольована від корпусу приймача статичного тиску, термометр опору, датчик перепаду тиску, при цьому робоча камера...
Фюзеляжний приймач повітряного тиску і аеродинамічний профіль, який використовується в ньому
Номер патенту: 34521
Опубліковано: 15.03.2001
Автори: Головкін Міхаіл Алексєєвіч, Нікольскій Алєксандр Алєксандровіч, Вождаєв Євгєній Сємьоновіч, Головкін Владімір Алєксєєвіч, Єфрємов Андрєй Алєксандровіч, Гуськов Валєнтін Івановіч, Кьоллєр Хейнц-Герхард
МПК: G01P 5/14, G01P 13/02
Мітки: ньому, фюзеляжний, профіль, приймач, повітряного, аеродинамічний, використовується, тиску
Формула / Реферат:
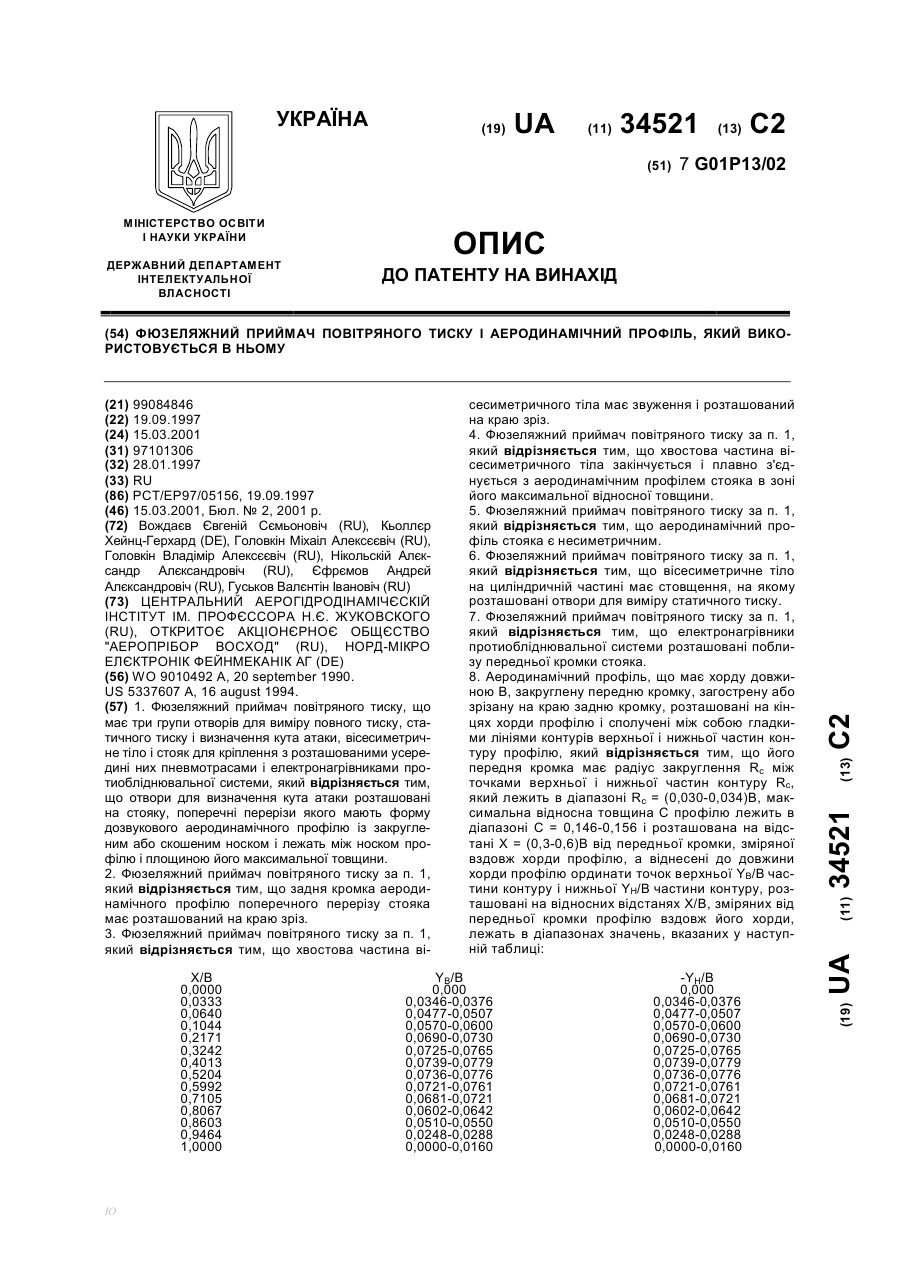
1. Фюзеляжний приймач повітряного тиску, що має три групи отворів для виміру повного тиску, статичного тиску і визначення кута атаки, вісесиметричне тіло і стояк для кріплення з розташованими усередині них пневмотрасами і електронагрівниками протиобліднювальної системи, який відрізняється тим, що отвори для визначення кута атаки розташовані на стояку, поперечні перерізи якого мають форму дозвукового аеродинамічного профілю із закругленим або...
Попередній патент: Формувач одиночних пачок імпульсів
Наступний патент: Стенд для дослідження характеристик підвіски автомобіля та автомобільних коліс
Випадковий патент: Брикети мінерально-соляні з радіопротекторними властивостями