Мобільний роботизований комплекс інженерної розвідки та розмінування
Номер патенту: 79061
Опубліковано: 10.04.2013
Автори: Рудаков Володимир Іванович, Дачковський Володимир Олександрович, Васьківський Михайло Іванович, Гусляков Олег Михайлович, Сторожик Іван Васильович



Формула / Реферат
1. Мобільний роботизований комплекс інженерної розвідки та розмінування, що містить пульт дистанційного керування та транспортний засіб оснащений корпусом, встановленим на несучій рамі з колісними рушіями, та розміщеними на зазначеному корпусі робочим маніпулятором, обладнаний датчиками відліку пройденого шляху, вимірювання кутів крену і диференту, датчиком вимірювання кута відхилення від курсу, датчиками запобігання зіткненню з перешкодами руху, оснащений ЕОМ пристрій управління і шарнірно-важільну підвіску пошукового обладнання, оснащену і датчиками кутового положення важелів відносно транспортного засобу та датчиками зіткнення із перешкодою, пошуковим обладнанням що є лінійкою локаторів зондування приповерхневих шарів грунту, встановлених кожна на своїй підвісці попереду транспортного засобу, який відрізняється тим, що до складу обладнання транспортного засобу додатково введено пристрій виявлення та блокування радіокерованих підривників, пристрій маркування перевіреного і очищеного від вибухонебезпечних пристроїв проходу, пристрій маркування місця знаходження вибухонебезпечних пристроїв, що не ідентифіковані або не підлягають знешкодженню на місці, обладнання для телевізійного пошуку вибухонебезпечних пристроїв, розміщених на поверхні ґрунту, газоаналізуюче обладнання для пошуку та аналізу слідів вибухових речовин вибухонебезпечних пристроїв у повітрі, обладнання системи технічного зору, що включає телевізійне обладнання панорамного огляду місцевості та робочої зони маніпулятора, захисним екраном та магазином змінних інструментів, при цьому до складу обладнання системи технічного зору входять телевізійне обладнання панорамного огляду місцевості та робочої зони маніпулятора, до складу робочого маніпулятора введено робочий пристрій, навігаційну систему виконано у вигляді приймача з блоком обробки сигналів глобальної системи позиціонування, наприклад, типу GPS, захисний екран виконано у вигляді сошника, при цьому як датчики запобігання зіткненню з перешкодами руху використовують лазерні далекоміри з пристроями обробки даних, як датчики кутового положення використовують малогабаритний датчик кутових прискорювань, як засіб зв'язку використовують приймально-передавальний пристрій системи інформаційних каналів та зв'язку із захищеними каналами зв'язку, як робочий маніпулятор використовують складний багатоланковий механізм, встановлений на поворотній платформі, яку виконано з можливістю її повороту на кути не менше 150° в обидві сторони, як робочий пристрій робочого маніпулятора використовують захоплювальний інструмент, який виконано у вигляді кліщів з можливістю їх обертання на кути не менше 360° в обидві сторони відносно своєї поздовжньої осі.
2. Мобільний роботизований комплекс за п. 1, який відрізняється тим, що у пульті дистанційного керування застосовується відеомонітор, з одночасним розміщенням на його екрані відеоінформації не менше ніж з трьох телевізійних камер.
3. Мобільний роботизований комплекс за п. 1, який відрізняється тим, що магазин змінних інструментів виконано з можливістю автоматизованої зміни інструментів.
Текст
Реферат: Корисна модель належить до мобільного роботизованого комплексу інженерної розвідки та розмінування, що містить пульт дистанційного керування та транспортний засіб, який містить пристрій виявлення та блокування радіокерованих підривників. UA 79061 U (12) UA 79061 U UA 79061 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме - до мобільних робототехнічних комплексів інженерної розвідки, дистанційного виявлення та знешкодження вибухонебезпечних пристроїв, прихованих під поверхнею ґрунту, або встановлених на ґрунт. Корисна модель може бути застосованою у військовій справі при проведенні розмінування, проведенні інженерної розвідки, виконанні проходів у міновибухових загородженнях, проведенні розвідувально-диверсійних заходів та при ліквідації наслідків техногенних та природних катастроф, зв'язаних з виконанням робіт, небезпечних для життя та здоров'я людей. Необхідність використання мобільних роботизованих комплексів для виконання робіт по виявленню та знешкодженню вибухонебезпечних пристроїв пов'язана з великим ризиком при проведенні розмінування. На даний час ще виявляються та знешкоджуються боєприпаси (снаряди, бомби, міни та патрони) часів Великої вітчизняної війни, по необережності або з інших причин вибухають артилерійські склади, при ліквідації наслідків цих явищ продовжуються випадки каліцтва та загибелі як сторонніх людей, так і спеціалістів по розмінуванню. Тому доцільно проводити такі роботи дистанційно, за допомогою мобільних роботизованих комплексів, які виключають знаходження спеціалістів безпосередньо біля вибухонебезпечного пристрою. Відомий дистанційно-керований радіаційно-стійкий розвідувальний комплекс виконаний на базі транспортного засобу з колісними рушіями, що містить корпус, на бічних стінках якого встановлені передні та задні колісні рушії, кожний з яких оснащений коромислом з розташованими на його кінцях ходовими колесами, кінематично зв'язаними з валом приводу, при цьому коромисла виконані хитними відносно корпусу, коромисла передніх рушіїв з'єднані один з одним за допомогою горизонтальної траверси, встановленої в її середній частині в поворотному вузлі, що жорстко з'єднаний з корпусом, з можливістю вільного повороту коліс навколо горизонтальної осі, нормальної до траверси, і самої траверси, а задні рушії мають незалежні одна від одної підвіски і виконані з можливістю вільного повороту коліс навколо осей, паралельних траверсі, причому кожний рушій оснащений індивідуальним приводом, на корпусі розміщені кабельний барабан із приводом і кабелеукладачем, та горизонтальна поворотна рама з приводом і розташованими на ній гнучким рукавом-маніпулятором із приводами та штангою із приводом, на який встановлені бокси передньої та задньої телевізійних камер з освітлювачами, а бокова телевізійна камера з освітлювачем, а також прожектор, встановлені на поворотній рамі, при цьому комплекс оснащений приладом для відбору проб повітря та пилу, а дистанційне керування комплексом здійснюється за допомогою пульта керування [1]. Недоліками відомого технічного рішення з точки зору поставленої задачі, можна вважати обмеженість функцій, що виникає як з умов функціонування дистанційно-керованого радіаційностійкого розвідувального комплексу, так і з його основним призначенням - робота на підприємствах ядерної енергетики в умовах високого рівня радіаційного випромінювання, що пояснює відсутність бездротової лінії зв'язку між пультом керування та безпосередньо шасі з приладами та наявність кабельного барабана з кабелеукладачем, а завелика маса транспортного засобу пояснюється необхідністю підсиленого захисту електронних пристроїв та приладів від радіаційного випромінювання. Робота дистанційно-керованого радіаційно-стійкого розвідувального комплексу проходить в умовах великої запиленості, що вимагає підвищеного рівня якості ущільнень та обмежена довжиною кабелю. Умови функціонування відомого дистанційно-керованого радіаційно-стійкого розвідувального комплексу вимагають удосконаленого набору систем забезпечення його працездатності. Відомий автономний мобільний робот для збирання дикоросів та спосіб керування ним, що містить самохідне шасі, робочий орган, блок автономного енергозабезпечення, блок глобального позиціонування (GPS), блок керування, блок виконавчих елементів, блок вертикального зору з блоками обробки зображення та синхронізації, блок горизонтального зору з блоками інфрачервоних сенсорів, обробки зображення, розпізнавання перешкод, блок навчання, блок тактильних сенсорів, блок технічної діагностики, блок прогнозування траєкторії руху та задатчик параметрів траєкторії руху, блок визначення економічної ефективності, блок перемикання режимів розпізнавання, блок комутації, блок аналізу помилок розпізнавання об'єктів [2]. Недоліком відомого технічного рішення є його обмежена функціональна придатність збір дикоросів, відсутність необхідного програмного забезпечення та обладнання для виконання інженерної розвідки та проведення саперних і розвідувальних завдань. Найбільш близьким технічним рішенням як по суті, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є мобільний носій пошукового обладнання та спосіб керування ним, що містить пульт дистанційного керування та транспортний засіб, оснащений корпусом, встановленим на несучій рамі з колісними рушіями, та розміщеними на зазначеному 1 UA 79061 U 5 10 15 20 25 30 35 40 45 50 55 60 корпусі робочим маніпулятором, обладнаний датчиками відліку пройденого шляху, вимірювання кутів крену і диференту, датчиком вимірювання кута відхилення від курсу, датчиками запобігання зіткненню з перешкодами руху, оснащений ЕОМ пристрій управління і шарнірноважільну підвіску пошукового обладнання, оснащену і датчиками кутового положення важелів відносно транспортного засобу та датчиками зіткнення із перешкодою, пошуковим обладнанням що є лінійкою локаторів зондування приповерхневих шарів ґрунту, встановлених кожна на своїй підвісці попереду транспортного засобу [3]. Недоліками технічного рішення, яке вибрано за найближчий прототип є відсутність обладнання та програмного забезпечення для визначення типу вибухонебезпечних пристроїв та його знешкодження, у зв'язку з чим найближчий аналог має обмежене технологічне призначення. У складі транспортного засобу як датчика кутів крену та диференту використовується гіроскопічний прилад, який потребує спеціального електричного живлення та допоміжного обладнання, що зменшує корисний об'єм транспортного засобу. Відсутні вмонтовані телекамери, а спостереження за навколишнім простором та зоною розмінування ведеться тільки візуально оператором. Відсутні пристрій для блокування спрацювання радіокерованих підривачів та обладнання для маркування знайдених вибухонебезпечних пристроїв чи перевіреної території. Датчики зіткнення виконані тактильного типу, що робить мобільний носій менш надійним. Відсутня прив'язка до місцевості, маршрут визначається за даними датчика відхилення від курсу, тобто неможливо оперативно реагувати на зміни у навколишньому просторі. Шарнірно-важільна підвіска локаторів виконана без можливості її повороту у горизонтальній площині, що звужує технологічні можливості даного мобільного носія (повороти робочого органа відносно вертикальної осі доведеться виконувати поворотом всього носія - можливість виїхати на неперевірену площину), а кількість підвісок з лінійками локаторів робить систему керування ними та всім мобільним носієм більш складною. Внутрішня порожнина мобільного носія не захищена від вражаючих факторів вибуху при несанкціонованому підриві вибухонебезпечного пристрою. Крім того, апаратура системи пошуку вибухонебезпечних пристроїв, незважаючи на попереднє виставлення величини проміжку між нижньою поверхнею локаторів та ґрунтом, недостатньо захищена від зіткнення з нерівностями поверхні. Система пошуку має у своєму складі тільки локатори пошуку у приповерхневих шарах ґрунту, без можливостей пошуку газоаналітичним методом слідів вибухової речовини та телевізійною системою розпізнавання мін, встановлених на ґрунт. Ці недоліки обмежують технологічні можливості виробу. В основу корисної моделі поставлена задача шляхом введення до складу мобільного роботизованого комплексу обладнання та програмного забезпечення для визначення типу вибухонебезпечних пристроїв та його знешкодження, принципово нової схеми системи керування мобільним робототехнічним комплексом та зміни конструкції комплексу шляхом встановлення пристроїв робочого та спеціального обладнання, забезпечити підвищення тактико-технічних характеристик та надійність і захищеність від несанкціонованого підриву вибухонебезпечного пристрою. Суть корисної моделі в мобільному роботизованому комплексі інженерної розвідки та розмінування, що містить пульт дистанційного керування з відеомонітором, блоками живлення та зв'язку, та транспортний засіб, оснащений корпусом, встановленим на несучій рамі з колісними рушіями, та розміщеними в/на зазначеному корпусі робочим маніпулятором з внутрішніми датчиками положення та приводами повороту важелів, системою навігації з датчиками пройденої відстані датчиками відхилення від визначеного курсу та датчиками кутів положення корпусу, локаційною системою пошуку вибухонебезпечних пристроїв, датчиками запобігання зіткненню з перешкодами руху, системою керування мобільним роботизованим комплексом та системою зв'язку між пультом дистанційного керування та транспортним засобом, при цьому локаційну систему пошуку вибухонебезпечних пристроїв розміщено на виносних штангах, які виконано з можливістю зміни свого положення у вертикальній площині, полягає в тому, що до складу обладнання транспортного засобу додатково введено пристрій виявлення та блокування радіокерованих підривників, пристрій маркування перевіреного і очищеного від вибухонебезпечних пристроїв проходу, пристрій маркування місця знаходження вибухонебезпечних пристроїв, що не ідентифіковані або не підлягають знешкодженню на місці, обладнання для телевізійного пошуку вибухонебезпечних пристроїв, розміщених на поверхні ґрунту, газоаналізуюче обладнання для пошуку та аналізу слідів вибухових речовин вибухонебезпечних пристроїв у повітрі, обладнання системи технічного зору, що включає телевізійне обладнання панорамного огляду місцевості та робочої зони маніпулятора, захисним екраном та магазином змінних інструментів. Суть корисної моделі полягає і в тому, що до складу обладнання системи технічного зору входять телевізійне обладнання панорамного 2 UA 79061 U 5 10 15 20 25 30 35 40 45 50 55 60 огляду місцевості та робочої зони маніпулятора, до складу робочого маніпулятора введено робочий пристрій, навігаційну систему виконано у вигляді приймача з блоком обробки сигналів глобальної системи позиціонування, наприклад, типу GPS, захисний екран виконано у вигляді сошника. Суть корисної моделі полягає також і в тому, що як датчики запобігання зіткненню з перешкодами руху використовують лазерні далекоміри з пристроями обробки даних, як датчики кутового положення використовують малогабаритний датчик кутових прискорювань, як засіб зв'язку використовують приймально-передавальний пристрій системи інформаційних каналів та зв'язку із захищеними каналами зв'язку, як робочий маніпулятор використовують складний багатоланковий механізм, встановлений на поворотній платформі, яку виконано з можливістю її повороту на кути не менше 150° в обидві сторони, як робочий пристрій робочого маніпулятора використовують захоплювальний інструмент, який виконано у вигляді кліщів з можливістю їх обертання на кути не менше 360° в обидві сторони відносно своєї поздовжньої осі. Новим в корисній моделі є те, що у пульті дистанційного керування застосовується відеомонітор, з одночасним розміщенням на його екрані відеоінформації не менше ніж з трьох телевізійних камер, а магазин змінних інструментів виконано з можливістю автоматизованої зміни інструментів. Рішення поставленої технічної задачі в мобільному роботизованому комплексі дійсно можливе тому, що: - до складу обладнання мобільного роботизованого комплексу інженерної розвідки та розмінування, що заявляється, додатково внесено пристрій виявлення та блокування радіокерованих підривників, що забезпечує: захист від несанкціонованого спрацювання вибухонебезпечних пристроїв з радіокерованими підривачами, зниження ймовірності ушкодження або знищення комплексу, загибелі чи каліцтва військовослужбовців; - до складу обладнання мобільного роботизованого комплексу інженерної розвідки та розмінування, що заявляється, додатково внесені пристрій маркування очищеного від вибухонебезпечних пристроїв проходу та пристрій маркування місця знаходження вибухонебезпечних пристроїв, що не ідентифіковані або не підлягають знешкодженню на місці, що забезпечують: безпечний пропуск військової техніки через пророблений прохід та об'їзд місця знаходження вибухонебезпечного пристрою; - до складу обладнання мобільного роботизованого комплексу інженерної розвідки та розмінування, що заявляється, додатково внесено обладнання для телевізійного пошуку вибухонебезпечних пристроїв, розміщених на поверхні ґрунту, та газоаналізуюче обладнання для пошуку слідів вибухових речовин вибухонебезпечних пристроїв, що забезпечують: дублювання основного пошукового обладнання, підвищення якості дистанційного виявлення, ідентифікації та нейтралізації вибухонебезпечних пристроїв встановлених різними методами на ґрунт чи в ґрунт, у пластикових чи металевих корпусах; - до складу обладнання мобільного роботизованого комплексу інженерної розвідки та розмінування, що заявляється, додатково внесено обладнання системи технічного зору, що включає телевізійне обладнання панорамного огляду місцевості та робочої зони маніпулятора, що забезпечує: підвищення якості дистанційного керування комплексом під час руху на місцевості, точність виконання технологічних операцій оператором за допомогою маніпулятора, можливість отримання і відображення більшої кількості інформації про навколишнє середовище; - до складу обладнання мобільного роботизованого комплексу інженерної розвідки та розмінування, що заявляється, замість тактильних датчиків зіткнення використані лазерні далекоміри, що забезпечують: автоматизоване виявлення комплексом перешкод на маршрутах руху, вимірювання відстані до виявлених перешкод руху та оцінки можливості подолання чи об'їзду цих перешкод; - до складу обладнання мобільного роботизованого комплексу інженерної розвідки та розмінування, що заявляється, додатково внесено приймач з блоком обробки сигналів глобальної системи позиціонування, наприклад, типу GPS, що забезпечує: можливість автономного руху комплексу в район виконання завдань, визначення і збереження точних координат місцезнаходження вибухонебезпечних пристроїв та пророблених проходів, підвищення надійності управління і орієнтації комплексу на місцевості; - робочий маніпулятор мобільного роботизованого комплексу виконано у вигляді складного багатоланкового механізму, встановленого на поворотну платформу, яку виконано з можливістю її повороту на кути не менше 150° у обидві сторони, а як робочий пристрій робочого маніпулятора використовують захоплювальний інструмент у вигляді кліщів, який виконано з можливістю їх обертання на кути не менше 360° у обидві сторони відносно своєї поздовжньої осі, з розміщеним на корпусі транспортного засобу магазином змінних інструментів з 3 UA 79061 U 5 10 15 20 25 30 35 40 45 50 55 60 автоматизованою їх зміною, що забезпечує: дистанційне виконання технологічних операцій оператором комплексу по знешкодженню вибухонебезпечних пристроїв та використання при цьому різних інструментів; - замість гіроскопічної системи визначення кутів нахилу транспортного засобу роботизованого комплексу використано малогабаритний датчик кутових прискорювань, що забезпечує: більшу точність вимірювань кутів нахилу, підвищує надійність вимірювань, зменшення габаритів для встановлення пристрою та менше споживання електроенергії; - для передачі даних від мобільного роботизованого комплексу на пульт керування системи дистанційного керування використано закриті канали зв'язку, що забезпечують: надійне дистанційне управління комплексом по радіоканалах, шифрування інформації, що передається та захист цих каналів від несанкціонованого втручання; - до складу обладнання транспортного засобу роботизованого комплексу додатково введено захисний екран у вигляді сошника, що забезпечує: додатковий захист обладнання та апаратури транспортного засобу від дії вражаючих факторів вибуху (вибухової хвилі, осколків) при можливому несанкціонованому підриві вибухонебезпечного пристрою; - відеомонітор пульта дистанційного керування виконаний з можливістю одночасного зображення інформації не менше ніж з трьох телевізійних камер, що забезпечує: більшу зручність роботи оператора шляхом відображення відеоінформації на одному відеомоніторі з кількома секторами (наприклад сектор системи контролю руху, сектор системи керування механізмами шасі, сектор системи пошуку вибухонебезпечних пристроїв, сектор робочої зони маніпулятора тощо). Порівняльний аналіз мобільного роботизованого комплексу з найближчим аналогом, який вибрано за прототип, показує, що мобільний роботизований комплекс інженерної розвідки та розмінування, що заявляється, повністю відповідає критерію корисної моделі "новизна". Суть корисної моделі пояснюється за допомогою креслень, де на Фіг. 1 показано загальну схему мобільного роботизованого комплексу інженерної розвідки та розмінування, що заявляється, на Фіг. 2 показано зовнішній вигляд транспортного засобу мобільного роботизованого комплексу інженерної розвідки та розмінування (що заявляється) на виді зліва, на Фіг. 3 показано зовнішній вигляд транспортного засобу мобільного роботизованого комплексу інженерноїрозвідки та розмінування на виді зверху, на Фіг. 4 показано блок-схему системи керування мобільного роботизованого комплексу інженерної розвідки та розмінування (що заявляється). Мобільний роботизований комплекс інженерної розвідки та розмінування (що заявляється), як варіант конструктивного виконання, містить пульт 1 дистанційного керування мобільним роботизованим комплексом інженерної розвідки та розмінування, транспортний засіб 2 мобільного роботизованого комплексу інженерної розвідки та розмінування. Пульт 1 дистанційного керування містить відеомонітор 3, блок 4 електроживлення, блок 5 зв'язку з транспортним засобом 2, зібрані у єдиному корпусі 6 пульта 1 дистанційного керування. Мобільний роботизований комплекс інженерної розвідки та розмінування (що заявляється) також містить корпус 7 транспортного засобу 2, встановлений на несучу раму (шасі) 8 з колісними рушіями 9, розміщеними з двох бортів транспортного засобу 2. Корпус 7 виконаний складної форми із листів броньованої сталі для захисту внутрішнього простору корпусу 7 та розміщеного у середині його обладнання. Зверху на корпусі 7 розміщується поворотна платформа 10 із закріпленим на ній робочим маніпулятором 11. Робочий маніпулятор 11 складний багатоланковий механізм з важелями 12, приводами 13 важелів 12 та робочим органом наприклад, кліщами 14. Поворотна платформа 10 виконана з можливістю її обертання навколо вертикальної вісі на кут не менше 150° в обидві сторони, кожний наступний важіль може обертатися на кут не менше 90° в обидві сторони навколо поперечної осі відносно попереднього важеля, крім того, робочий орган, наприклад кліщі 14, виконані з можливістю обертання на кути не менше 360° у обидві сторони. Таким чином, забезпечується переведення робочого маніпулятора 11 з похідного, транспортного стану (згорнутого) у робоче, розкрите положення, обертання робочого органу - наприклад кліщів 14, забезпечує виконання їм технологічних операцій по розмінуванню. По бортах передньої частини даху корпуса 7 розміщені дві штанги 15 пошукової апаратури з приводами 16 їх розкриття. Крім своєї основної задачі - встановлення пошукової апаратури у робоче положення, привода 16 виконані з можливістю підйому штанг 15 (незалежно одна від одної) над поверхнею ґрунту, запобігаючи зіткненню елементів пошукової апаратури з нерівностями ґрунту по сигналам лазерних далекомірів 17. Лазерні далекоміри 17, розміщені по контуру транспортного засобу 2, забезпечують уникнення зіткнень пошукового обладнання та усього транспортного засобу 2 з можливими перешкодами під час руху. На штангах 15 розміщені двоконтурні антени 18 4 UA 79061 U 5 10 15 20 25 30 35 40 45 50 55 60 локаційної системи пошуку вибухонебезпечних пристроїв (далі ВНП), телевізійні камери 19 телевізійної системи пошуку ВНП, лінійка хімічних датчиків 20 газоаналітичної системи пошуку ВНП. Локаційна система пошуку призначена для пошуку та виявлення ВНП, прихованих під шаром ґрунту, телевізійна система пошуку та виявлення ВНП призначена для пошуку ВНП, розміщених на поверхні ґрунту, газоаналітична система призначена для виявлення у повітрі на місцевості молекул вибухової речовини, що міститься у ВНП. Також у передній частині корпусу 7 транспортного засобу 2 розміщено пристрій 21 маркування виявлених, але не знешкоджених з різних причин, ВНП. Пристрій 22 маркування перевіреного та розмінованого проходу розміщено на тильній частині корпусу 7 транспортного засобу 2. На передній частині даху корпусу 7 також розміщені антена 23 пристрою 24 блокування радіокерованих підривників, магазин 25 із змінними інструментом для робочого маніпулятора 11 (середній частині даху корпусу 7), у тильній частині даху розміщено антену 26 приймально-передавального засобу зв'язку 27 та приймач 28 системи глобального позиціонування, наприклад, типу GPS. Для додаткового захисту обладнання транспортного засобу 2 від можливого несанкціонованого підриву ВНП та для розчищення перевіреного проходу у передній частині шасі 8 транспортного засобу 2 закріплено захисний екран 29 у вигляді сошника, що виконаний з можливістю його підйому над поверхнею 30 ґрунту. Мобільний роботизований комплекс інженерної розвідки та розмінування, що заявляється, обладнано системою технічного зору у вигляді телекамер 31 панорамного огляду, розміщених по контуру транспортного засобу 2, та телекамери 32 робочого маніпулятора 11 з автономним приводом 33. Завдяки автономному приводу 33 телевізійної камери 32 робочого маніпулятора 11 є можливість використання її як додаткової камери панорамного огляду при переміщенні у транспортному положенні. У середині корпуса 7 транспортного засобу 2 розміщують двокоординатний датчик положення малогабаритний датчик 34 прискорювань для вимірювання кутів крену та диференту шасі 8; блок 35 приладів системи автономного керування обладнанням, блок 36 автономного електроживлення. Крім того, на Фіг. 2, Фіг. 3 умовно показано перешкоду 37 руху, ВНП 38, що розміщено на поверхні ґрунту, ВНП 39, що розміщений під шаром ґрунту. Блок-схема системи керування показано на Фіг. 4, де цифрами позначено систему керування 40 мобільного роботизованого комплексу інженерної розвідки та розмінування, систему 41 дистанційного керування, систему 42 планування, керування та синхронізації, систему 43 ідентифікації та визначення типу ВНП, систему 44 автономного керування рухом шасі, систему 45 керування виконавчими пристроями, телевізійну систему 46 пошуку ВНП, локаційну систему 47 пошуку ВНП, газоаналітичну систему 48 пошуку слідів вибухової речовини, систему 49 видачі інформаційних параметрів, система 50 інформаційних каналів та зв'язку, блок 51 керування маркуванням, бортову інформаційну базу 52, систему 53 технічного зору, система 54 навігації та позиціонування, блок 55 керування джерелами автономного енергопостачання, блок 56 технічної самодіагностики, блок 57 виявлення та блокування радіокерованих підривників. Система 41 дистанційного керування мобільним комплексом призначена для здійснення дистанційного керування функціонування всіма системами, здійснення приймання-передавання службової інформації між пультом 1 дистанційного керування та транспортним засобом 2, відображення на відеомоніторі 3 зображення навколишньої місцевості та робочої зони іншого навісного обладнання, документування отриманої інформації, здійснення оперативного керування транспортним засобом 2 у автоматизованому режимі роботи. Система 42 планування, керування та синхронізації призначена для планування операцій, аналізу і формування образів ситуацій, формування команд керування, визначення та оптимізації маршруту, синхронізації та самонавчання. Система 43 ідентифікації та визначення типу ВНП призначена для ідентифікації та визначення типу ВНП, визначення маси вибухової речовини у ВНП, визначення глибини закладення ВНП, визначення типу/марки ВНП та визначення радіусу ураження ВНП. Система 44 автономного керування рухом транспортного засобу призначена для прогнозування траєкторії руху видачі команд контролю напрямку, виявлення та розпізнавання перешкод, визначення можливості подолання перешкод або їх об'їзду, перемикання режимів руху, документування маршруту, параметрів технічного стану механізмів шасі та відрахування пройденої відстані. Система 45 керування виконавчими пристроями призначена для обробки сигналів внутрішніх датчиків та формування команд всім виконавчим пристроям. Телевізійна система 46 пошуку ВНП призначена для пошуку ВНП, розміщених на поверхні ґрунту, оптичним способом за допомогою телевізійних камер 19, керування роботою телевізійних камер та засобів освітлення, а також для аналізу помилок розпізнавання телевізійної системи 46. Локаційна система 47 пошуку ВНП призначена для пошуку та виявлення ВНП, розміщених під шаром ґрунту, керування приймально-передавальною антеною пошуку ВНП, вимірювання співвідношення "сигнал/шум", 5 UA 79061 U 5 10 15 20 25 30 35 40 45 50 55 60 обчислювання, аналізу помилок розпізнавання локаційної системи 47. Газоаналітична система 48 призначена для пошуку та виявлення молекул вибухової речовини у повітрі, керування хімічними датчиками та обробки сигналів хімічних датчиків. Система 49 видачі інформаційних параметрів призначена для комутації запитів до бортової інформаційної бази 52 відповідних систем мобільного комплексу, проводить постійний моніторинг навколишньої обстановки за даними системи 53 технічного зору. Система 50 інформаційних каналів та зв'язку призначена для забезпечення двостороннього закритого зв'язку у радіолінії "пульт керування транспортний засіб". Блок 51 керування маркуванням призначений для керування пристроями 21 маркування виявлених і незнешкоджених з будь-яких причин ВНП, та 22 маркування перевіреного проходу. Бортова інформаційна база 52 призначена для зберігання та видачі інформації споживачам, та містить інформаційні блоки по моделях зовнішнього середовища, внутрішній моделі мобільного комплексу з його тактико-технічними даними, типові моделі ВНП, параметри обмеження технологічних операцій, моделі метеорологічних умов та базу картографічної інформації. Система 53 технічного зору призначена для обробки сигналів та видачі до системи 50 інформаційних каналів та зв'язку відеосигналів з телевізійних камер 31 панорамного огляду і телевізійної камери 32 робочого маніпулятора 11, а також сигналів лазерних далекомірів 17 до системи 49 видачі інформаційних каналів. Система 54 навігації та позиціонування призначена для виконання навігаційних завдань: визначення курсу переміщення шасі по сигналах з пульта 1 дистанційного керування або при переміщенні його у автономному режимі, з передачею отриманої інформації до системи 44 автономного керування рухом та пульта 1 дистанційного керування для документування маршруту, та визначення координат місця знаходження транспортного засобу 2, прив'язка до місцевості проводиться за допомогою обробки сигналів приймача системи глобального позиціонування (GPS). Блок 55 керування джерелами автономного енергопостачання призначений для постачання електроенергії до всіх споживачів шасі, забезпечення постійного енергопостачання всім споживачам від автономного джерела електроживлення та перемикання споживачів з основного на резервне джерело енергопостачання у разі необхідності. Блок 56 технічної самодіагностики призначений для проведення діагностики всіх систем мобільного комплексу при включенні електроживлення та постійний контроль за працездатністю всіх систем та блоків системи керування 40 та передача інформації про роботу і технічний стан систем та блоків до пульта керування 1 та до системи 42 планування, керування та синхронізації. Блок 57 виявлення та блокування радіокерованих підривників призначений для виявлення обладнаних радіокерованими підривниками ВНП, наприклад - фугасів, та блокування їх спрацьовування по радіосигналу. Робота мобільного роботизованого комплексу інженерної розвідки та розмінування (що заявляється) проводиться у наступній послідовності. Робота мобільного роботизованого комплексу інженерної розвідки та розмінування може проводиться у двох режимах - автоматизованому, при якому переміщення транспортного засобу та пошук ВНП здійснюється автоматично, а рішення про метод знешкодження та саме знешкодження приймає та виконує оператор, та автоматичному (програмному), що дозволяє реалізувати переміщення транспортного засобу, пошук, ідентифікацію та знешкодження ВНП у автономному режимі шляхом реалізації заданих програм. При підготовці мобільного роботизованого комплексу інженерної розвідки та розмінування (далі - мобільного комплексу) до застосування необхідні дані завантажуються у бортову інформаційну базу 52 та здійснюється прив'язка до місцевості за допомогою системи 54 навігації та позиціонування, яка має у своєму складі приймач 28 сигналів GPS. З початком роботи оператор за допомогою системи 41 дистанційного керування через систему 50 інформаційних каналів та зв'язку вводить координати району проведення інженерної розвідки та розмінування у систему 44 автономного керування рухом та дає команду мобільному комплексу самостійно вирушити у заданий район. За допомогою системи 42 планування, керування та синхронізації розроблюється оптимальний маршрут руху та видається команда до системи 44 автономного керування рухом на початок переміщення за розробленим маршрутом. Під час руху транспортного засобу по вказаному маршруту проводиться безперервний огляд навколишньої обстановки телевізійними камерами 31 панорамного огляду та, при необхідності, телевізійною камерою 32 робочого маніпулятора системи 53 технічного зору з одночасним проведенням аналізу результатів сканування простору та обробка сигналів лазерних далекомірів 17, що вимірюють відстань до перешкод по маршруту руху. При виявленні та розпізнаванні перешкоди руху у системі 44 автономного керування рухом шасі формуються необхідні команди керування рухом, враховуючі технічні можливості транспортного засобу 2 та характер виявленої перешкоди 37. При цьому система 44 автономного керування рухом транспортного засобу 2 змінює режим руху та формує уточнений 6 UA 79061 U 5 10 15 20 25 30 35 40 45 маршрут. Переміщення транспортного засобу 2 продовжується за зміненим маршрутом. Блок 56 самодіагностики та контролю веде постійний моніторинг технічного стану механізмів транспортного засобу 2 та контролює виконання сигналів керування від системи 44 автономного керування рухом, ця інформація також надходить до системи 50 інформаційних каналів та зв'язку для передачі її на пульт 1 дистанційного керування системи 41 дистанційного керування. Маршрути руху транспортного засобу 2 як основний, так і змінений, та зображення перешкоди 37 відображуються на одному відеомоніторі 3 пульта 1 дистанційного керування. По прибутті транспортного засобу в заданий район системою 15 навігації та позиціонування уточнюються необхідні координати зони роботи шасі на місцевості та маршрути руху у робочій зоні, після їх відпрацювання починається переміщення транспортного засобу 2 у заданому напрямку з включеними телевізійною системою 46 пошуку ВНП, локаційною системою 47 пошуку ВНП, газоаналітичною системою 48 пошуку ВНП та блоком 57 виявлення та блокування радіокерованих підривників. Сигнали від систем 46, 47, 48 пошуку ВНП через систему 49 видачі інформаційних параметрів надходять до системи 43 ідентифікації та визначення типа ВНП, та, через систему 50 інформаційних каналів та зв'язку - до пульта 1 дистанційного керування, інформуючи оператора про виявлення ВНП. Система 42 планування, керування та синхронізації, спираючись на дані систем 46, 47, 48 пошуку ВНП, блока 57 виявлення та блокування радіокерованих підривників та інших компонентів системи 40 керування мобільним комплексом, формує сценарії знешкодження виявленого ВНП та направляє його у вигляді рекомендацій до пульта 1 дистанційного керування оператору мобільного комплексу. Оператор, використовуючи отриману інформацію, а також відеозображення на відеомоніторі 3, приймає остаточне рішення про знешкодження ВНП за одним із запропонованим системою 40 керування методом. При визнанні неможливим знешкодження ВНП на місці або якісно ідентифікувати ВНП системою 43 ідентифікації та визначення типу ВНП дистанційно проводиться маркування місця знаходження ВНП пристроєм 21 маркування незнешкоджених ВНП блока 51 керування маркуванням, збереження їх координат, транспортний засіб 2 робить об'їзд небезпечного місця, проводиться коригування маршруту системою 44 автономного керування рухом. Пройдений маршрут, де не виявлено ВНП, маркується пристроєм 22 маркування проходу блока 51 керування маркуванням, який розміщується на тильній частині шасі, а координати перевіреного проходу (документування маршруту) записуються системою 44 автономного керування рухом та направляються до пульта 1 дистанційного керування. Використання мобільного роботизованого комплексу інженерної розвідки та розмінування, що заявляється, дає можливість зменшити втрати особового складу та техніки від міновибухових пристроїв, підвищити технологічні можливості по дистанційному виявленню та знешкодженню вибухонебезпечних пристроїв, проводити ефективну інженерну розвідку та розмінування місцевості без збільшення фактору ризику несанкціонованого підриву вибухонебезпечного пристрою та зменшую вплив "людського фактора" при виконанні саперних робіт. Джерела інформації: 1. Патент України на промисловий зразок "Дистанційно-керований радіаційно-стійкий комплекс" № 11203, МКПЗ 12-99, 13.09.2004 - аналог. 2. Заявка № 2009127229/02 к патенту Российской Федерации "Автономный мобильный робот для сбора дикоросов и способ управления им", МПК B25J5/00, 14.07.2009 - аналог. 3. Патент Российской Федерации на изобретение "Мобильный носитель поискового оборудования и способ управления им", № 2168146, F41H11/16, 27.05.2001 - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 1. Мобільний роботизований комплекс інженерної розвідки та розмінування, що містить пульт дистанційного керування та транспортний засіб оснащений корпусом, встановленим на несучій рамі з колісними рушіями, та розміщеними на зазначеному корпусі робочим маніпулятором, обладнаний датчиками відліку пройденого шляху, вимірювання кутів крену і диференту, датчиком вимірювання кута відхилення від курсу, датчиками запобігання зіткненню з перешкодами руху, оснащений ЕОМ пристрій управління і шарнірно-важільну підвіску пошукового обладнання, оснащену і датчиками кутового положення важелів відносно транспортного засобу та датчиками зіткнення із перешкодою, пошуковим обладнанням що є лінійкою локаторів зондування приповерхневих шарів грунту, встановлених кожна на своїй підвісці попереду транспортного засобу, який відрізняється тим, що до складу обладнання 7 UA 79061 U 5 10 15 20 25 транспортного засобу додатково введено пристрій виявлення та блокування радіокерованих підривників, пристрій маркування перевіреного і очищеного від вибухонебезпечних пристроїв проходу, пристрій маркування місця знаходження вибухонебезпечних пристроїв, що не ідентифіковані або не підлягають знешкодженню на місці, обладнання для телевізійного пошуку вибухонебезпечних пристроїв, розміщених на поверхні ґрунту, газоаналізуюче обладнання для пошуку та аналізу слідів вибухових речовин вибухонебезпечних пристроїв у повітрі, обладнання системи технічного зору, що включає телевізійне обладнання панорамного огляду місцевості та робочої зони маніпулятора, захисним екраном та магазином змінних інструментів, при цьому до складу обладнання системи технічного зору входять телевізійне обладнання панорамного огляду місцевості та робочої зони маніпулятора, до складу робочого маніпулятора введено робочий пристрій, навігаційну систему виконано у вигляді приймача з блоком обробки сигналів глобальної системи позиціонування, наприклад, типу GPS, захисний екран виконано у вигляді сошника, при цьому як датчики запобігання зіткненню з перешкодами руху використовують лазерні далекоміри з пристроями обробки даних, як датчики кутового положення використовують малогабаритний датчик кутових прискорювань, як засіб зв'язку використовують приймально-передавальний пристрій системи інформаційних каналів та зв'язку із захищеними каналами зв'язку, як робочий маніпулятор використовують складний багатоланковий механізм, встановлений на поворотній платформі, яку виконано з можливістю її повороту на кути не менше 150° в обидві сторони, як робочий пристрій робочого маніпулятора використовують захоплювальний інструмент, який виконано у вигляді кліщів з можливістю їх обертання на кути не менше 360° в обидві сторони відносно своєї поздовжньої осі. 2. Мобільний роботизований комплекс за п. 1, який відрізняється тим, що у пульті дистанційного керування застосовується відеомонітор, з одночасним розміщенням на його екрані відеоінформації не менше ніж з трьох телевізійних камер. 3. Мобільний роботизований комплекс за п. 1, який відрізняється тим, що магазин змінних інструментів виконано з можливістю автоматизованої зміни інструментів. 8 UA 79061 U 9 UA 79061 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMobile robotic complex of engineering survey and mine clearing
Автори англійськоюHusliakov Oleh Mykhailovych, Rudakov Volodymyr Ivanovych, Vaskivskyi Mykhailo Ivanovych, Dachkovskyi Volodymyr Oleksandrovych, Storozhyk Ivan Vasyliovych
Назва патенту російськоюМобильный роботизированный комплекс инженерной разведки и разминирования
Автори російськоюГусляков Олег Михайлович, Рудаков Владимир Иванович, Васькивский Михаил Иванович, Дачковский Владимир Александрович, Сторожик Иван Васильевич
МПК / Мітки
МПК: B62D 57/00, F41H 11/16
Мітки: мобільній, роботизований, розмінування, розвідки, інженерної, комплекс
Код посилання
<a href="https://ua.patents.su/12-79061-mobilnijj-robotizovanijj-kompleks-inzhenerno-rozvidki-ta-rozminuvannya.html" target="_blank" rel="follow" title="База патентів України">Мобільний роботизований комплекс інженерної розвідки та розмінування</a>
Керований робототехнічний комплекс розвідки та розмінування
Номер патенту: 73976
Опубліковано: 10.10.2012
Автори: Рудаков Володимир Іванович, Кучеров Дмитро Павлович, Васьківський Михайло Іванович, Гусляков Олег Михайлович
МПК: B62M 27/00, B60G 23/00, F41H 11/16
Мітки: робототехнічний, розвідки, комплекс, розмінування, керований
Формула / Реферат:
Керований робототехнічний комплекс розвідки та розмінування, що містить систему дистанційного управління, систему планування, управління та синхронізації, систему ідентифікації і визначення типу вибухонебезпечних пристроїв, систему автономного управління рухом шасі, систему управління виконавчими пристроями, телевізійну систему пошуку вибухонебезпечних пристроїв, систему пошуку вибухонебезпечних пристроїв, систему видачі інформаційних...
Мобільний комплекс для ізоляції радіоактивних відходів від навколишнього середовища
Номер патенту: 4260
Опубліковано: 17.01.2005
Автори: Вовненко Генадій Миколайович, Нікітін Володимир Юхимович, Невідомський Володимир Олександрович
МПК: G21F 9/34
Мітки: відходів, радіоактивних, мобільній, навколишнього, ізоляції, середовища, комплекс
Формула / Реферат:
1. Мобільний комплекс для ізоляції радіоактивних відходів від навколишнього середовища, що містить механізм завантаження, виконаний у вигляді привідного візка з вантажопідйомним засобом, і бокси затарювання, який відрізняється тим, що він оснащений двома суміжними порталами, кожний із яких установлений з можливістю повздовжнього переміщення по напрямних, а бокси затарювання радіоактивних відходів виконані у вигляді залізобетонних посудин, які...
Пристрій для дистанційного мінування та розмінування
Номер патенту: 73787
Опубліковано: 10.10.2012
Автори: Куровська Тетяна Юріївна, Денисенко Олександр Михайлович, Коцюруба Володимир Іванович
МПК: F41H 11/00
Мітки: пристрій, мінування, дистанційного, розмінування
Формула / Реферат:
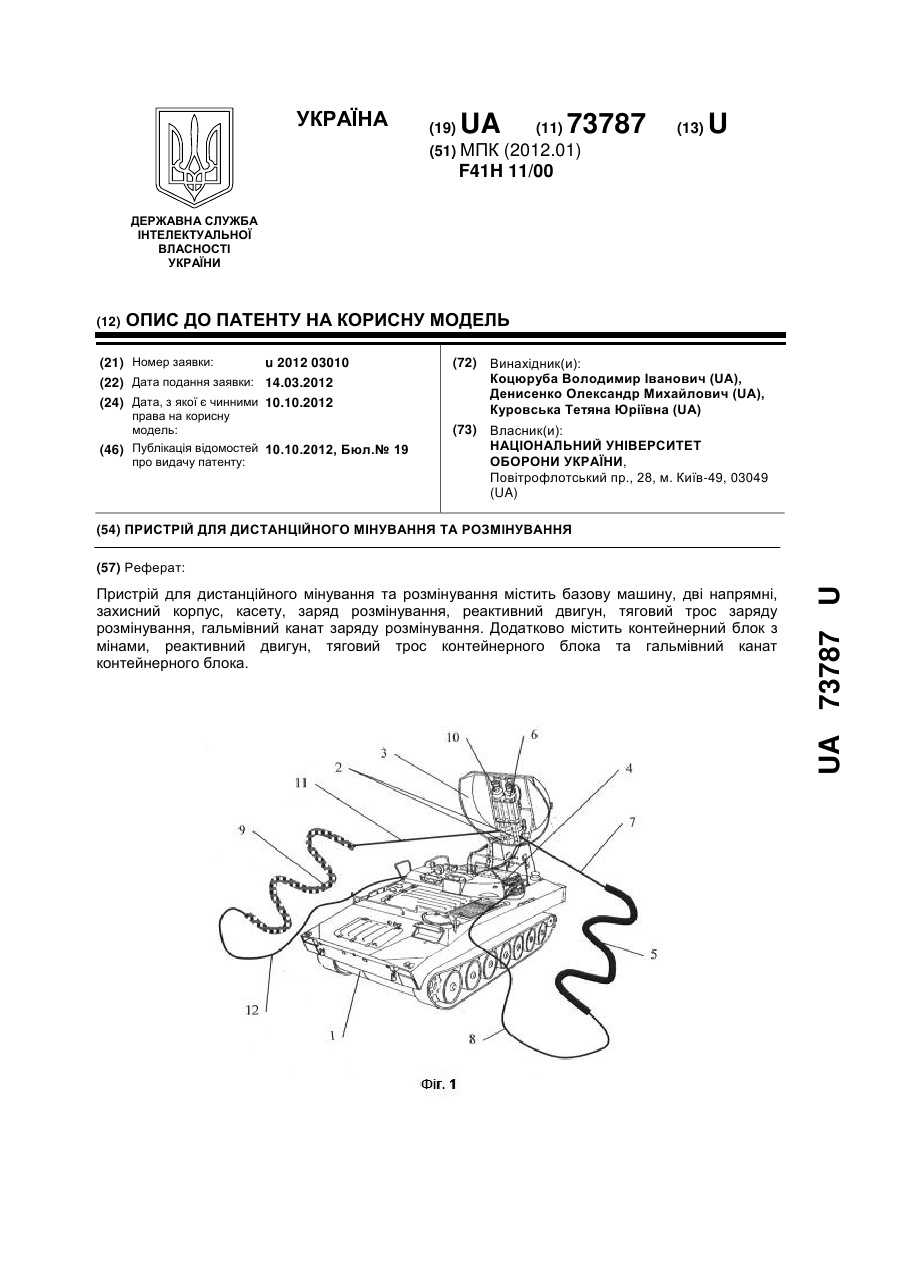
Пристрій для дистанційного мінування та розмінування, що містить базову машину, дві напрямні, захисний корпус, касету, заряд розмінування, реактивний двигун, тяговий трос заряду розмінування, гальмівний канат заряду розмінування, при цьому, дві напрямні розміщуються у захисному корпусі, який шарнірно закріплений до корпусу базової машини, касета розташована у корпусі базової машини, причому, заряд розмінування у транспортному положенні...
Спосіб дистанційного розмінування
Номер патенту: 59491
Опубліковано: 10.05.2011
Автори: Яблоков Володимир Васильович, Коцюруба Володимир Іванович, Хомік Микола Миколайович
МПК: F41H 11/16, F41H 11/12, F41H 11/00
Мітки: дистанційного, розмінування, спосіб
Формула / Реферат:
Спосіб дистанційного розмінування, при якому згортають підривний модуль в транспортний стан, з'єднують підривний модуль з насосом за допомогою шланга, транспортують підривний модуль в згорнутому стані на мінне поле за допомогою реактивного снаряда, розгортають підривний модуль на мінному полі і висаджують вибухову речовину в підривному модулі за допомогою дистанційного приладу, який відрізняється тим, що після транспортування підривного...
Комп`ютеризований мобільний комплекс для оцінки якості покриття автомобільних доріг
Номер патенту: 32142
Опубліковано: 12.05.2008
Автори: Хабаров Володимир Остапович, Алексієв Володимир Олегович, Гурко Олександр Геннадійович, Дзюбенко Олександра Володимирівна
МПК: G01C 7/00, G01C 23/00
Мітки: мобільній, доріг, комп`ютеризований, оцінки, якості, автомобільних, покриття, комплекс
Формула / Реферат:
Комп'ютеризований мобільний комплекс для оцінки якості покриття автомобільних доріг, що містить елементи вимірювання параметрів автомобільних доріг, блок обробки інформації та ПЕОМ, який відрізняється тим, що елементи вимірювання параметрів автомобільних доріг виконані у вигляді двох датчиків прискорень з можливістю вимірювання прискорень у діапазоні ±2g у горизонтальній та вертикальній площинах, що розташовані у геометричному центрі...
Попередній патент: Пристрій для визначення механіко-технологічних властивостей рослинних матеріалів
Наступний патент: Спосіб ретроградного інтрамедулярного остеосинтезу переломів стегнової кістки
Випадковий патент: Спосіб визначення ростових властивостей плазми крові людини