Керування наборами пілотних сигналів в системі зв’язку з декількома несучими
Номер патенту: 96889
Опубліковано: 12.12.2011
Автори: Гхош Донна, Лотт Крістофер Дж., Блек Пітер Дж., Аттар Рашид Ахмед А., Резайіфар Рамін
Формула / Реферат
1. Спосіб зв'язку, який здійснюється вузлом доступу, що діє в системі зв'язку, який включає етапи, на яких:
приймають від термінала доступу інформацію для множини наборів пілотних сигналів;
ідентифікують один з наборів пілотних сигналів як набір пілотних сигналів з додаткової зони охоплення;
визначають, що задоволений попередньо визначений критерій; і
посилають інструкцію терміналу доступу для додавання набору пілотних сигналів з додаткової зони охоплення і іншого набору пілотних сигналів, який є також з додаткової зони охоплення, до активного набору термінала доступу.
2. Спосіб за п. 1, що додатково містить етап, на якому ідентифікують набір пілотних сигналів з додаткової зони охоплення як набір з найбільш слабким рівнем потужності сигналу з додаткової зони охоплення і приписують, щоб ідентифікований набір пілотних сигналів з рівнем сигналу, що перевищує попередньо визначений поріг, задовольняв попередньо визначеному критерію.
3. Спосіб за п. 1, що додатково містить етап, на якому ідентифікують набір пілотних сигналів з додаткової зони охоплення як набір з найбільш слабким рівнем сигналу з додаткової зони охоплення і приписують, щоб ідентифікований набір пілотних сигналів з рівнем сигналу, що перевищує попередньо визначену різницю рівнів потужності, вище відповідного рівня сигналу з набору пілотних сигналів поточної зайнятої зони охоплення, задовольняв попередньо визначеному критерію.
4. Спосіб за п. 1, що додатково містить етап, на якому ідентифікують набір пілотних сигналів з додаткової зони охоплення як набір з найбільш сильним рівнем сигналу з додаткової зони охоплення і приписують необхідність відповідному рівню сигналу набору пілотних сигналів поточної зайнятої зони охоплення, який падає нижче попередньо визначеного порогу, задовольняти попередньо визначений критерій.
5. Спосіб за п. 1, що додатково містить етап, на якому ідентифікують набір пілотних сигналів з додаткової зони охоплення як набір з найбільш сильним рівнем потужності сигналу з додаткової зони охоплення і приписують необхідність рівню сигналу ідентифікованого набору пілотних сигналів перевищувати попередньо визначений поріг як задоволення попередньо визначеного критерію, причому інструкція терміналу доступу включає в себе спочатку додавання ідентифікованого набору пілотних сигналів до активного набору, коли задоволений цей попередньо визначений критерій, і після цього додавання іншого набору пілотних сигналів до активного набору, коли рівень сигналу іншого набору пілотних сигналів перевищує інший попередньо визначений поріг.
6. Спосіб за п. 1, що додатково включає етап, на якому посилають іншу інструкцію терміналу доступу для видалення всіх наборів пілотних сигналів з додаткової зони охоплення з активного набору термінала доступу, коли не задоволений попередньо визначений критерій.
7. Спосіб зв'язку, який здійснюється терміналом доступу, який включає етапи, на яких:
посилають інформацію про множину наборів пілотних сигналів вузлу доступу, причому один з наборів пілотних сигналів є набором сигналів з додаткової зони охоплення; і
приймають інструкцію від вузла доступу для додавання набору пілотних сигналів з додаткової зони охоплення до активного набору термінала доступу, коли задоволений попередньо визначений критерій, і додавання щонайменше одного іншого набору пілотних сигналів з додаткової зони охоплення до активного набору.
8. Вузол доступу, здатний функціонувати в системі зв'язку, що містить:
засіб для прийому від термінала доступу інформації для множини наборів пілотних сигналів;
засіб для ідентифікації одного з наборів пілотних сигналів як набору пілотних сигналів з додаткової зони охоплення;
засіб для визначення, що задоволений попередньо визначений критерій; і
засіб для відправки інструкції терміналу доступу для додавання набору пілотних сигналів з додаткової зони охоплення і іншого набору пілотних сигналів, також з додаткової зони охоплення, до активного набору термінала доступу.
9. Вузол доступу за п. 8, що додатково містить засіб для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш слабким рівнем сигналу з додаткової зони охоплення і засіб для приписування необхідності ідентифікованому набору пілотних сигналів з рівнем потужності сигналу, що перевищує попередньо визначений поріг, задовольняти попередньо визначений критерій.
10. Вузол доступу за п. 8, що додатково містить засіб для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш слабким рівнем потужності сигналу з додаткової зони охоплення і засіб для приписування необхідності ідентифікованому набору пілотних сигналів з рівнем сигналу, що перевищує попередньо визначену різницю рівнів потужності, вище відповідного рівня сигналу набору пілотних сигналів поточної зайнятої зони охоплення, задовольняти попередньо визначений критерій.
11. Вузол доступу за п. 8, що додатково містить засіб для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш сильним рівнем сигналу з додаткової зони охоплення і засіб для приписування необхідності відповідному рівню набору пілотних сигналів поточної зайнятої зони охоплення, який падає нижче попередньо визначеного порогу, задовольняти попередньо визначений критерій.
12. Вузол доступу за п. 8, що додатково містить засіб для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш сильним рівнем сигналу з додаткової зони охоплення і засіб для приписування необхідності рівню сигналу ідентифікованого набору пілотних сигналів перевищувати попередньо визначений поріг як задоволення попередньо визначеного критерію, причому засіб для відправки інструкції терміналу доступу включає в себе засіб для додавання першого ідентифікованого набору пілотних сигналів до активного набору, коли задоволений попередньо визначений критерій, і засіб для додавання після цього іншого набору пілотних сигналів до активного набору, коли рівень потужності іншого набору пілотних сигналів перевищує інший попередньо визначений поріг.
13. Вузол доступу за п. 8, що додатково містить засіб для відправки іншої інструкції терміналу доступу для видалення всіх наборів пілотних сигналів з додаткової зони охоплення з активного набору термінала доступу, коли не задоволений попередньо визначений критерій.
14. Вузол доступу за п. 8, при цьому система зв'язку містить різнорідне розгортання.
15. Вузол доступу за п. 8, при цьому система зв'язку містить макростільникове розгортання.
16. Термінал доступу, здатний до функціонування в системі зв'язку, що містить:
засіб для відправки інформації про множину наборів пілотних сигналів вузлу доступу, причому один з наборів пілотних сигналів є набором сигналів з додаткової зони охоплення; і
засіб для прийому інструкції від вузла доступу для додавання набору пілотних сигналів з додаткової зони охоплення до активного набору термінала доступу, коли задоволений попередньо визначений критерій, і додавання щонайменше одного іншого набору пілотних сигналів з додаткової зони охоплення до активного набору.
17. Пристрій, здатний функціонувати в системі зв'язку, що містить:
схеми, сконфігуровані для:
прийому від термінала доступу інформації для множини наборів пілотних сигналів;
ідентифікації одного з наборів пілотних сигналів як набору пілотних сигналів з додаткової зони охоплення;
визначення, що задоволений попередньо визначений критерій; і
відправки інструкції терміналу доступу для додавання набору пілотних сигналів з додаткової зони охоплення і іншого набору пілотних сигналів, також з додаткової зони охоплення, до активного набору термінала доступу.
18. Пристрій за п. 17, в якому схеми додатково сконфігуровані для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш слабким рівнем сигналу з додаткової зони охоплення і для приписування необхідності ідентифікованому набору пілотних сигналів з рівнем сигналу, що перевищує попередньо визначений поріг, задовольняти попередньо визначений критерій.
19. Пристрій за п. 17, в якому схеми додатково сконфігуровані для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш слабким рівнем сигналу з додаткової зони охоплення і для приписування необхідності ідентифікованому набору пілотних сигналів з рівнем сигналу, що перевищує попередньо визначену різницю рівнів потужності, вище відповідного рівня сигналу набору пілотних сигналів поточної зайнятої зони охоплення, задовольняти попередньо визначений критерій.
20. Пристрій за п. 17, в якому схеми додатково сконфігуровані для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш сильним рівнем сигналу з додаткової зони охоплення і для приписування необхідності відповідному рівню сигналу з набору пілотних сигналів поточної зайнятої зони охоплення, який падає нижче попередньо визначеного порогу, задовольняти попередньо визначений критерій.
21. Пристрій за п. 17, в якому схеми додатково сконфігуровані для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш сильним рівнем сигналу з додаткової зони охоплення для приписування необхідності рівню сигналу ідентифікованого набору пілотних сигналів перевищувати попередньо визначений поріг, як задоволення попередньо визначеного критерію, і для відправки інструкції терміналу доступу шляхом спочатку додавання ідентифікованого набору пілотних сигналів до активного набору, коли задоволений попередньо визначений критерій, і після цього додавання іншого набору пілотних сигналів до активного набору, коли рівень сигналу іншого набору пілотних сигналів перевищує інший попередньо визначений поріг.
22. Пристрій за п. 17, в якому схеми додатково сконфігуровані для відправки іншої інструкції терміналу доступу для видалення всіх наборів пілотних сигналів з додаткової зони охоплення з активного набору термінала доступу, коли не задоволений попередньо визначений критерій.
23. Пристрій, здатний функціонувати в системі зв'язку, що містить:
схеми, сконфігуровані для:
відправки інформації множини наборів пілотних сигналів вузлу доступу, причому один з наборів пілотних сигналів є набором сигналів з додаткової зони охоплення; і
прийому інструкції від вузла доступу для додавання набору пілотних сигналів з додаткової зони охоплення до активного набору пристрою, коли задоволений попередньо визначений критерій, і додавання щонайменше одного іншого набору пілотних сигналів з додаткової зони охоплення до активного набору.
24. Пристрій за п. 23, що є одночастотним пристроєм.
25. Пристрій за п. 23, що є багаточастотним пристроєм.
26. Зчитуваний комп'ютером носій, фізично втілений зі зчитуваним комп'ютером програмним кодом для:
прийому від термінала доступу інформації для множини наборів пілотних сигналів;
ідентифікації одного з наборів пілотних сигналів як набору пілотних сигналів з додаткової зони охоплення;
визначення, що задоволений попередньо визначений критерій; і
відправки інструкції терміналу доступу для додавання набору пілотних сигналів з додаткової зони охоплення і іншого набору пілотних сигналів, також з додаткової зони охоплення, до активного набору термінала доступу.
Текст
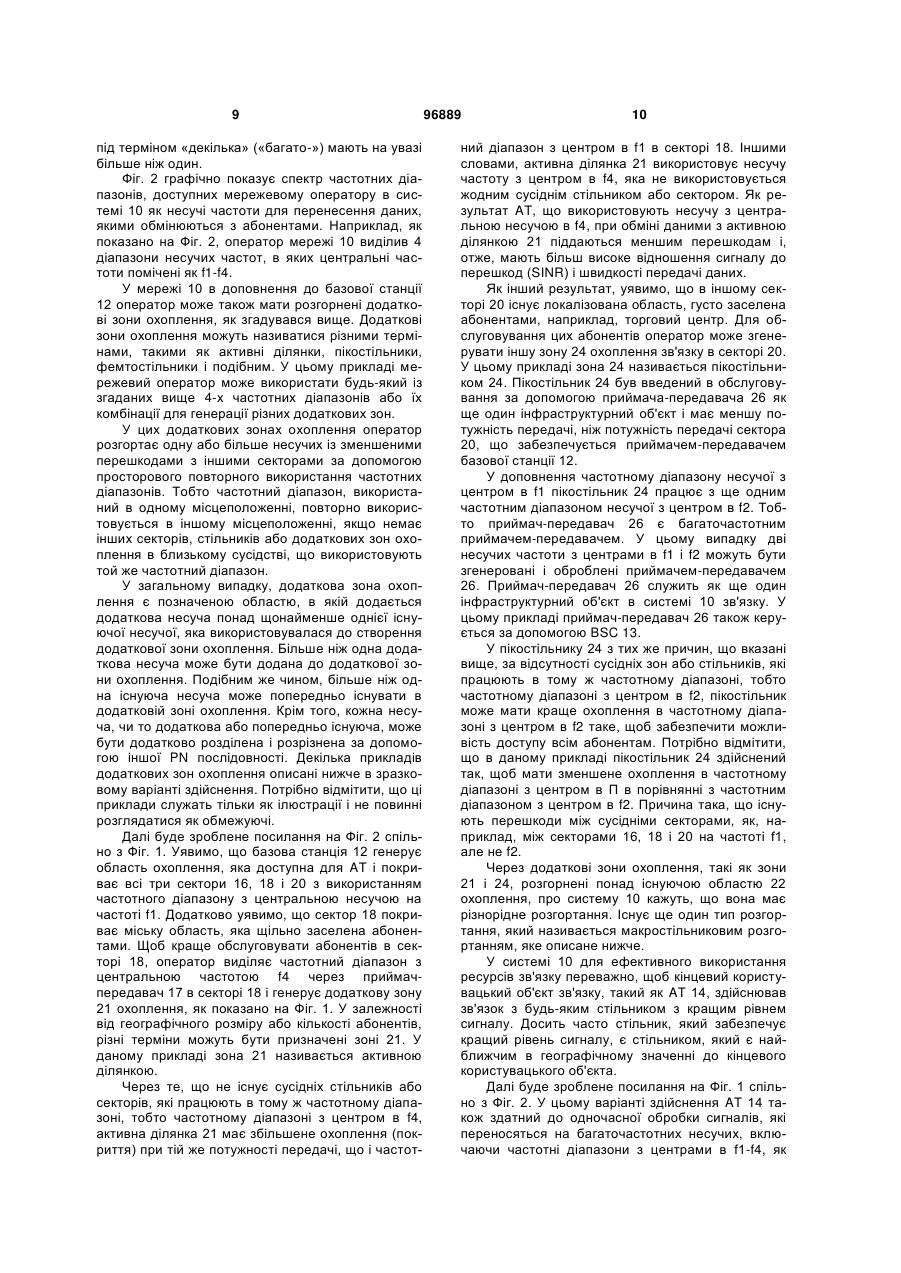
1. Спосіб зв'язку, який здійснюється вузлом доступу, що діє в системі зв'язку, який включає етапи, на яких: приймають від термінала доступу інформацію для множини наборів пілотних сигналів; ідентифікують один з наборів пілотних сигналів як набір пілотних сигналів з додаткової зони охоплення; визначають, що задоволений попередньо визначений критерій; і посилають інструкцію терміналу доступу для додавання набору пілотних сигналів з додаткової зони охоплення і іншого набору пілотних сигналів, який є також з додаткової зони охоплення, до активного набору термінала доступу. 2. Спосіб за п. 1, що додатково містить етап, на якому ідентифікують набір пілотних сигналів з додаткової зони охоплення як набір з найбільш слабким рівнем потужності сигналу з додаткової зони охоплення і приписують, щоб ідентифікований набір пілотних сигналів з рівнем сигналу, що перевищує попередньо визначений поріг, задовольняв попередньо визначеному критерію. 3. Спосіб за п. 1, що додатково містить етап, на якому ідентифікують набір пілотних сигналів з додаткової зони охоплення як набір з найбільш слабким рівнем сигналу з додаткової зони охоплення і приписують, щоб ідентифікований набір пілотних сигналів з рівнем сигналу, що перевищує попере 2 (19) 1 3 8. Вузол доступу, здатний функціонувати в системі зв'язку, що містить: засіб для прийому від термінала доступу інформації для множини наборів пілотних сигналів; засіб для ідентифікації одного з наборів пілотних сигналів як набору пілотних сигналів з додаткової зони охоплення; засіб для визначення, що задоволений попередньо визначений критерій; і засіб для відправки інструкції терміналу доступу для додавання набору пілотних сигналів з додаткової зони охоплення і іншого набору пілотних сигналів, також з додаткової зони охоплення, до активного набору термінала доступу. 9. Вузол доступу за п. 8, що додатково містить засіб для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш слабким рівнем сигналу з додаткової зони охоплення і засіб для приписування необхідності ідентифікованому набору пілотних сигналів з рівнем потужності сигналу, що перевищує попередньо визначений поріг, задовольняти попередньо визначений критерій. 10. Вузол доступу за п. 8, що додатково містить засіб для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш слабким рівнем потужності сигналу з додаткової зони охоплення і засіб для приписування необхідності ідентифікованому набору пілотних сигналів з рівнем сигналу, що перевищує попередньо визначену різницю рівнів потужності, вище відповідного рівня сигналу набору пілотних сигналів поточної зайнятої зони охоплення, задовольняти попередньо визначений критерій. 11. Вузол доступу за п. 8, що додатково містить засіб для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш сильним рівнем сигналу з додаткової зони охоплення і засіб для приписування необхідності відповідному рівню набору пілотних сигналів поточної зайнятої зони охоплення, який падає нижче попередньо визначеного порогу, задовольняти попередньо визначений критерій. 12. Вузол доступу за п. 8, що додатково містить засіб для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш сильним рівнем сигналу з додаткової зони охоплення і засіб для приписування необхідності рівню сигналу ідентифікованого набору пілотних сигналів перевищувати попередньо визначений поріг як задоволення попередньо визначеного критерію, причому засіб для відправки інструкції терміналу доступу включає в себе засіб для додавання першого ідентифікованого набору пілотних сигналів до активного набору, коли задоволений попередньо визначений критерій, і засіб для додавання після цього іншого набору пілотних сигналів до активного набору, коли рівень потужності іншого набору пілотних сигналів перевищує інший попередньо визначений поріг. 13. Вузол доступу за п. 8, що додатково містить засіб для відправки іншої інструкції терміналу доступу для видалення всіх наборів пілотних сигналів з додаткової зони охоплення з активного набору 96889 4 термінала доступу, коли не задоволений попередньо визначений критерій. 14. Вузол доступу за п. 8, при цьому система зв'язку містить різнорідне розгортання. 15. Вузол доступу за п. 8, при цьому система зв'язку містить макростільникове розгортання. 16. Термінал доступу, здатний до функціонування в системі зв'язку, що містить: засіб для відправкиінформації про множину наборів пілотних сигналів вузлу доступу, причому один з наборів пілотних сигналів є набором сигналів з додаткової зони охоплення; і засіб для прийому інструкції від вузла доступу для додавання набору пілотних сигналів з додаткової зони охоплення до активного набору термінала доступу, коли задоволений попередньо визначений критерій, і додавання щонайменше одного іншого набору пілотних сигналів з додаткової зони охоплення до активного набору. 17. Пристрій, здатний функціонувати в системі зв'язку, що містить: схеми, сконфігуровані для: прийому від термінала доступу інформації для множини наборів пілотних сигналів; ідентифікації одного з наборів пілотних сигналів як набору пілотних сигналів з додаткової зони охоплення; визначення, що задоволений попередньо визначений критерій; і відправки інструкції терміналу доступу для додавання набору пілотних сигналів з додаткової зони охоплення і іншого набору пілотних сигналів, також з додаткової зони охоплення, до активного набору термінала доступу. 18. Пристрій за п. 17, в якому схеми додатково сконфігуровані для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш слабким рівнем сигналу з додаткової зони охоплення і для приписування необхідності ідентифікованому набору пілотних сигналів з рівнем сигналу, що перевищує попередньо визначений поріг, задовольняти попередньо визначений критерій. 19. Пристрій за п. 17, в якому схеми додатково сконфігуровані для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш слабким рівнем сигналу з додаткової зони охоплення і для приписування необхідності ідентифікованому набору пілотних сигналів з рівнем сигналу, що перевищує попередньо визначену різницю рівнів потужності, вище відповідного рівня сигналу набору пілотних сигналів поточної зайнятої зони охоплення, задовольняти попередньо визначений критерій. 20. Пристрій за п. 17, в якому схеми додатково сконфігуровані для ідентифікації набору пілотних сигналів з додаткової зони охоплення як набору з найбільш сильним рівнем сигналу з додаткової зони охоплення і для приписування необхідності відповідному рівню сигналу з набору пілотних сигналів поточної зайнятої зони охоплення, який падає нижче попередньо визначеного порогу, задовольняти попередньо визначений критерій. 21. Пристрій за п. 17, в якому схеми додатково сконфігуровані для ідентифікації набору пілотних 5 96889 6 сигналів з додаткової зони охоплення як набору з найбільш сильним рівнем сигналу з додаткової зони охоплення для приписування необхідності рівню сигналу ідентифікованого набору пілотних сигналів перевищувати попередньо визначений поріг, як задоволення попередньо визначеного критерію, і для відправки інструкції терміналу доступу шляхом спочатку додавання ідентифікованого набору пілотних сигналів до активного набору, коли задоволений попередньо визначений критерій, і після цього додавання іншого набору пілотних сигналів до активного набору, коли рівень сигналу іншого набору пілотних сигналів перевищує інший попередньо визначений поріг. 22. Пристрій за п. 17, в якому схеми додатково сконфігуровані для відправки іншої інструкції терміналу доступу для видалення всіх наборів пілотних сигналів з додаткової зони охоплення з активного набору термінала доступу, коли не задоволений попередньо визначений критерій. 23. Пристрій, здатний функціонувати в системі зв'язку, що містить: схеми, сконфігуровані для: відправки інформації множини наборів пілотних сигналів вузлу доступу, причому один з наборів пілотних сигналів є набором сигналів з додаткової зони охоплення; і прийому інструкції від вузла доступу для додавання набору пілотних сигналів з додаткової зони охоплення до активного набору пристрою, коли задоволений попередньо визначений критерій, і додавання щонайменше одного іншого набору пілотних сигналів з додаткової зони охоплення до активного набору. 24. Пристрій за п. 23, що є одночастотним пристроєм. 25. Пристрій за п. 23, що є багаточастотним пристроєм. 26. Зчитуваний комп'ютером носій, фізично втілений зі зчитуваним комп'ютером програмним кодом для: прийому від термінала доступу інформації для множини наборів пілотних сигналів; ідентифікації одного з наборів пілотних сигналів як набору пілотних сигналів з додаткової зони охоплення; визначення, що задоволений попередньо визначений критерій; і відправки інструкції терміналу доступу для додавання набору пілотних сигналів з додаткової зони охоплення і іншого набору пілотних сигналів, також з додаткової зони охоплення, до активного набору термінала доступу. Дана заявка на патент вимагає пріоритет Попередньої Заявки США № 61/054762, озаглавленої «Hand-in and Hand-out Procedures in a Multi-Carrier Communication System», поданої 20 травня 2008 p., правоволодільцем якої є правонаступник цього і яка явним чином включена в даний документ за допомогою посилання. Даний винахід загалом належить до зв'язку і, більш конкретно, стосується керування наборами пілотних сигналів для неоднорідних систем зв'язку з декількома несучими. У бездротових мережах, таких як бездротова стільникова мережа, мережеві оператори звичайно розгортають мінімальну величину смуги частот для забезпечення області обслуговування для кінцевих користувачів в позначеній географічній зоні. Згадана мінімальна величина смуги частот іноді називається несучою області обслуговування. По мірі збільшення потреб користувачів мережеві оператори додають додаткові смуги частот для збільшення ємності, щоб задовольнити ці потреби. Додаткова смуга частот іноді називається «ємісною» несучою. Для задоволення ще більших потреб додатково можуть розгортатися більше однієї «ємнісних» несучих. «Ємнісні» несучі можуть бути організовані так, щоб охоплювати повністю географічну зону або, як альтернатива, на основі «стільник-за-стільником». У останньому випадку створюються додаткові зони охоплення, які іноді називаються активними ділянками, для забезпечення ємності і розширення охоплення. Включення активних ділянок до складу приводить до неоднорідної мережі зв'язку з розгортанням декількох несучих. Активні ділянки можуть бути створені згідно з потребами, як згадувалося вище. Проте, ці активні ділянки часто обслуговуються більше ніж однією несучими частотами. Як таким, користувацьким пристроям необхідно мати здатність перемикання (переходів) між різними частотами. Досі не існувало задовільної схеми забезпечення яких-небудь гладких переходів. Наприклад, при звичайній міжчастотній передачі обслуговування за допомогою пристрою з однією несучою необхідний розрив існуючого сеансу зв'язку, здійснюваного на одній частоті, перш ніж пристрій зв'язку буде здатний відновити сеанс зв'язку, здійснюваний на іншій частоті. Подібне перемикання може призвести до втрати даних. Крім того, перерване перемикання може негативно позначитися на користувацькому досвіді. Відповідно, існує необхідність забезпечення гладкого перемикання з однієї частоти на іншу в системі зв'язку з декількома несучими. У системі бездротового зв'язку, де розгорнені просторово неоднорідні частотні канали для генерації різних зон зв'язку, керування наборами пілотних сигналів, згенерованих в додатковій зоні охоплення, основується на ідентифікації набору попередньо вибраних сигналів з множини пілотних сигналів і визначенні, чи задоволений попередньо визначений критерій. Система бездротового зв'язку може бути представлена в формі стільникової бездротової системи з різними конфігураціями. Одна така конфігурація може містити макростіль 7 ники з однаковим числом несучих, макростільники з неоднорідним числом несучих, або різнорідне розгортання з комбінацією макростільників, пікостільників, віддалених радіоточок, повторювачів і т. п. Винахід може бути втілений як апаратне забезпечення і програмне забезпечення в різних об'єктах зв'язку. Ці і інші ознаки і переваги стануть очевидні для фахівців з подальшого докладного опису, що розглядається спільно з супроводжуючими кресленнями, на яких однакові посилальні позиції належать до однакових частин. Фіг. 1 є схемою, яка показує мережу з різнорідним розгортанням, організованим згідно із зразковим варіантом здійснення винаходу. Фіг. 2 є графічним представленням спектра смуг частот, доступних мережевому оператору в зразковому варіанті здійснення. Фіг. 3 є графічним представленням, яке показує рівень пілотних сигналів різних зон зв'язку в зразковому варіанті здійснення. Фіг. 4 є схемою, яка показує зразкове компонування, згідно з яким мережа з неоднорідним макростільниковим розгортанням з'єднується з різнорідним розгортанням. Фіг. 5 є блок-схемою послідовності операцій, яка ілюструє етапи, що використовуються в процесах керування наборами пілотних сигналів згідно із здійсненням об'єктом інфраструктури в зразковому варіанті здійснення. Фіг. 6 є іншою блок-схемою послідовності операцій, яка ілюструє етапи, що використовуються в процесах керування наборами пілотних сигналів згідно із здійсненням користувацьким об'єктом в зразковому варіанті здійснення. Фіг. 7 є схемою, яка показує частину апаратної реалізації пристрою для виконання процесів керування наборами пілотних сигналів в зразковому варіанті здійснення. Подальший опис надається, щоб дозволити будь-якому фахівцеві зробити і використати винахід. Подробиці приведені в подальшому описі з метою пояснення. Необхідно розуміти, що звичайному фахівцеві очевидно, що винахід може бути здійснений на практиці без використання цих певних подробиць. У інших випадках відомі структури і процеси не пояснюються, щоб не насичувати опис винаходу непотрібними подробицями. Таким чином, даний винахід не мається на увазі обмеженим показаними варіантами здійснення, а повинен мати найширший об'єм, який відповідає принципам і особливостям, розкритим в даному документі. Крім того, в подальшому описі, з метою стислості і ясності, використовується термінологія, пов'язана зі стандартами оптимізованої передачі даних, що еволюціонувала, по одній несучій (1xEV-DO), як було введено в побут в рамках Проекту 2 Партнерства 3-го Покоління (3GPP2) Міжнародним Союзом Телекомунікацій (ITU). Необхідно підкреслити, що винахід також застосовний до інших технологій, таких як технології і пов'язані стандарти, що належать до Широкосмугового Множинного Доступу з Кодовим Розділенням Каналів (WCDMA), Множинного Доступу з Часовим 96889 8 Розділенням Каналів (TDMA), Множинного Доступу з Ортогональним Частотним Розділенням Каналів (OFDMA) і т. д. Термінології, пов'язані з різними технологіями, можуть розрізнюватися. Наприклад, в залежності від технології, що розглядається, Термінал Доступу (AT), що використовується в стандартах 1xEV-DO, іноді може називатися мобільною станцією, користувацьким терміналом, абонентським модулем, користувацьким обладнанням і т. п. як декілька прикладів. Подібним же чином Вузол Доступу (AN), що використовується в стандартах 1xEV-DO, іноді може називатися точкою доступу, базовою станцією, Node В (Вузол Б) і т. п. Необхідно відмітити, що різні термінології можуть бути застосовні до різних технологій у разі застосовності. Розгортання мереж звичайно пов'язані з користувацькими потребами. Наприклад, із збільшенням потреб мережеві оператори можуть додавати додаткове апаратне забезпечення або смуги частот до існуючих мереж. Додавання апаратного забезпечення може здійснюватися в формі додавання додаткових зон охоплення. Подібні зони можуть бути згенеровані розділенням стільників або розгортанням додаткових мережевих вузлів, які мають різні назви, такі як активні ділянки, пікостільники, фемтостільники, повторювачі і т. п. Структура мережі із згаданими вище додатковими смугами частот або апаратними вузлами в загальному випадку називається різнорідним розгортанням. Фіг. 1 є спрощеним кресленням, не виконаним в масштабі, а, швидше, схематичним представленням, яке показує мережу з різнорідним розгортанням з декількома несучими, структурованим згідно із зразковим варіантом здійснення винаходу. На Фіг. 1 вся система зв'язку з декількома несучими позначена посилальною позицією 10. У системі 10 присутній інфраструктурний об'єкт, який називається базовою станцією 12, яка просто є наземною станцією, що має приймач-передавач, здатний здійснювати зв'язок з декількома AT, один з яких показаний як AT 14 на Фіг. 1. Базова станція 12 керується ще одним інфраструктурним об'єктом, який називається Контролером Базової Станції 13 (BSC). BSC 13 може керувати більше ніж одним об'єктом зв'язку, таким як базова станція 12, показана на Фіг. 1. Далі в даному документі BSC 13, підключений з іншими об'єктами зв'язку, такими як базова станція 12, в сукупності називаються Мережею 15 Доступу (AN). Базова станція 12 в цьому прикладі забезпечує покриття бездротовим зв'язком трьом секторам, а саме, секторам 16, 18 і 20. Кожному з секторів 16, 18 і 20 призначається унікальна PN (Псевдовипадкова Шумова) послідовність для зв'язку з абонентами, згідно зі стандартами 1xEVDO. Як згадувалося раніше, для того, щоб збільшити пропускну здатність і мінімізувати перешкоди сигналів, базова станція 12 може бути базовою станцією з декількома несучими. Тобто базова станція 12 і інші інфраструктури! об'єкти в мережі 100 можуть здійснювати зв'язок з AT, такими як AT 14, за допомогою більше ніж одного частотного діапазону. У даному описі і прикладеній формулі 9 під терміном «декілька» («багато-») мають на увазі більше ніж один. Фіг. 2 графічно показує спектр частотних діапазонів, доступних мережевому оператору в системі 10 як несучі частоти для перенесення даних, якими обмінюються з абонентами. Наприклад, як показано на Фіг. 2, оператор мережі 10 виділив 4 діапазони несучих частот, в яких центральні частоти помічені як f1-f4. У мережі 10 в доповнення до базової станції 12 оператор може також мати розгорнені додаткові зони охоплення, як згадувався вище. Додаткові зони охоплення можуть називатися різними термінами, такими як активні ділянки, пікостільники, фемтостільники і подібним. У цьому прикладі мережевий оператор може використати будь-який із згаданих вище 4-х частотних діапазонів або їх комбінації для генерації різних додаткових зон. У цих додаткових зонах охоплення оператор розгортає одну або більше несучих із зменшеними перешкодами з іншими секторами за допомогою просторового повторного використання частотних діапазонів. Тобто частотний діапазон, використаний в одному місцеположенні, повторно використовується в іншому місцеположенні, якщо немає інших секторів, стільників або додаткових зон охоплення в близькому сусідстві, що використовують той же частотний діапазон. У загальному випадку, додаткова зона охоплення є позначеною областю, в якій додається додаткова несуча понад щонайменше однієї існуючої несучої, яка використовувалася до створення додаткової зони охоплення. Більше ніж одна додаткова несуча може бути додана до додаткової зони охоплення. Подібним же чином, більше ніж одна існуюча несуча може попередньо існувати в додатковій зоні охоплення. Крім того, кожна несуча, чи то додаткова або попередньо існуюча, може бути додатково розділена і розрізнена за допомогою іншої PN послідовності. Декілька прикладів додаткових зон охоплення описані нижче в зразковому варіанті здійснення. Потрібно відмітити, що ці приклади служать тільки як ілюстрації і не повинні розглядатися як обмежуючі. Далі буде зроблене посилання на Фіг. 2 спільно з Фіг. 1. Уявимо, що базова станція 12 генерує область охоплення, яка доступна для AT і покриває всі три сектори 16, 18 і 20 з використанням частотного діапазону з центральною несучою на частоті f1. Додатково уявимо, що сектор 18 покриває міську область, яка щільно заселена абонентами. Щоб краще обслуговувати абонентів в секторі 18, оператор виділяє частотний діапазон з центральною частотою f4 через приймачпередавач 17 в секторі 18 і генерує додаткову зону 21 охоплення, як показано на Фіг. 1. У залежності від географічного розміру або кількості абонентів, різні терміни можуть бути призначені зоні 21. У даному прикладі зона 21 називається активною ділянкою. Через те, що не існує сусідніх стільників або секторів, які працюють в тому ж частотному діапазоні, тобто частотному діапазоні з центром в f4, активна ділянка 21 має збільшене охоплення (покриття) при тій же потужності передачі, що і частот 96889 10 ний діапазон з центром в f1 в секторі 18. Іншими словами, активна ділянка 21 використовує несучу частоту з центром в f4, яка не використовується жодним сусіднім стільником або сектором. Як результат AT, що використовують несучу з центральною несучою в f4, при обміні даними з активною ділянкою 21 піддаються меншим перешкодам і, отже, мають більш високе відношення сигналу до перешкод (SINR) і швидкості передачі даних. Як інший результат, уявимо, що в іншому секторі 20 існує локалізована область, густо заселена абонентами, наприклад, торговий центр. Для обслуговування цих абонентів оператор може згенерувати іншу зону 24 охоплення зв'язку в секторі 20. У цьому прикладі зона 24 називається пікостільником 24. Пікостільник 24 був введений в обслуговування за допомогою приймача-передавача 26 як ще один інфраструктурний об'єкт і має меншу потужність передачі, ніж потужність передачі сектора 20, що забезпечується приймачем-передавачем базової станції 12. У доповнення частотному діапазону несучої з центром в f1 пікостільник 24 працює з ще одним частотним діапазоном несучої з центром в f2. Тобто приймач-передавач 26 є багаточастотним приймачем-передавачем. У цьому випадку дві несучих частоти з центрами в f1 і f2 можуть бути згенеровані і оброблені приймачем-передавачем 26. Приймач-передавач 26 служить як ще один інфраструктурний об'єкт в системі 10 зв'язку. У цьому прикладі приймач-передавач 26 також керується за допомогою BSC 13. У пікостільнику 24 з тих же причин, що вказані вище, за відсутності сусідніх зон або стільників, які працюють в тому ж частотному діапазоні, тобто частотному діапазоні з центром в f2, пікостільник може мати краще охоплення в частотному діапазоні з центром в f2 таке, щоб забезпечити можливість доступу всім абонентам. Потрібно відмітити, що в даному прикладі пікостільник 24 здійснений так, щоб мати зменшене охоплення в частотному діапазоні з центром в Π в порівнянні з частотним діапазоном з центром в f2. Причина така, що існують перешкоди між сусідніми секторами, як, наприклад, між секторами 16, 18 і 20 на частоті f1, але не f2. Через додаткові зони охоплення, такі як зони 21 і 24, розгорнені понад існуючою областю 22 охоплення, про систему 10 кажуть, що вона має різнорідне розгортання. Існує ще один тип розгортання, який називається макростільниковим розгортанням, яке описане нижче. У системі 10 для ефективного використання ресурсів зв'язку переважно, щоб кінцевий користувацький об'єкт зв'язку, такий як AT 14, здійснював зв'язок з будь-яким стільником з кращим рівнем сигналу. Досить часто стільник, який забезпечує кращий рівень сигналу, є стільником, який є найближчим в географічному значенні до кінцевого користувацького об'єкта. Далі буде зроблене посилання на Фіг. 1 спільно з Фіг. 2. У цьому варіанті здійснення AT 14 також здатний до одночасної обробки сигналів, які переносяться на багаточастотних несучих, включаючи частотні діапазони з центрами в f1-f4, як 11 показано на Фіг. 2. Апаратна архітектура AT 14 також описана нижче. Уявимо, що AT 14 може переміщатися між різними стільниками і секторами і спочатку розташований в місцеположенні, позначеному посилальною позицією 28, показаною на Фіг. 1. У місцеположенні 28 AT знаходиться в області обслуговування охоплення сектора 20, який працює в частотному діапазоні з центром в f1. Як згадувалося раніше, AT 14 не виконаний стаціонарним. Коли AT 14 пересувається в іншу зону охоплення, AT 14 може бути вимушений здійснювати зв'язок з іншим стільником або сектором. Для підтримки якості обслуговування користувацькому об'єкту, такому як AT 14, дуже бажане гладке перемикання між об'єктами обслуговуючих вузлів. Тобто задачею мережевого оператора системи 10 є забезпечення гладких операцій абонентів при перетині стільників і секторів. Для виконання цієї задачі AT 14 підтримує Активний Набір (ASET) в своїй пам'яті, згідно зі стандартами 1xEV-DO. Для кожного сектора або стільника з пов'язаною несучою, доступною для AT 14, в ASET, наприклад, сектор 20 з несучою частотою з центром в f1, показаний на Фіг. 1, зберігаються ідентифікатор стільника і рівень пілотного сигналу стільника в частотному діапазоні. Інформація будь-якого пілотного сигналу, доступного для AT 14, називається набором пілотних сигналів. Далі терміни «набір пілотних сигналів», «пілотний набір», а іноді просто «набір» використовуються взаємозамінно. Інформація набору пілотних сигналів, збережена в ASET AT 14, називається набором кандидатів. Набір пілотних сигналів додається до ASET, коли задоволений попередньо визначений критерій. Аналогічно набір пілотних сигналів видаляється з ASET, коли задоволений ще один попередньо визначений критерій. Наприклад, коли рівень пілотного сигналу поточного стільника або сектора на несучій, з якою здійснює зв'язок AT 14, стає слабким, і рівень пілотного сигналу сусіднього стільники або сектора на несучій тієї ж самої або іншої частоти досягає попередньо визначеного порога, AT 14 може визначити, що доречна зміна обслуговуючого стільники або сектора, і після цього робить дії для забезпечення такої зміни. У системі з багатьма несучими, такій як система 10, показана на ФІГ. 1, в доповнення до стільника або сектора і інформації про рівень пілотного сигналу, інформацію про несучу частоту кожного стільника або сектора також треба включати в пілотний набір ASET при роботі згідно зі стандартами радіоінтерфейсу 3GPP2 1xEV-DO, розділ 8. Далі посилання знов зробиться на Фіг. 1 для вказаного прикладу. Як згадувалося раніше, в місцеположенні 28 AT 14 здійснює зв'язок з сектором 20, який працює в діапазоні частот з центром в f1. Тому, в ASET AT 14 включений пілотний набір {20, f1}. Далі для кожного пілотного набору перший параметр в дужках представляє ідентифікаційну інформацію сектора або стільника, а другий параметр представляє значення центральної несучої частоти. У подальшому описі, для ясності і простоти опису, ідентифікаційна інформація сектора або стільника є . посилальною позицією, що викорис 96889 12 товується для визначення сектора або стільника на кресленнях. AT 14 здійснює моніторинг рівня пілотного сигналу кожного пілотного набору в своєму ASET, тобто набору кандидатів, безперервно. Набір кандидатів є списком пар секторів (або стільників) і діапазонів частот в ASET, на які покладається AT 14 з метою мобільності. Згідно зі стандартами 1xEV-DO AT 14 повідомляє значення рівнів пілотних сигналів всіх пілотних наборів, які AT 14 здатний приймати, до AN 15 за допомогою повідомлення Протоколу Оновлення Маршруту (RUP), коли значення рівнів пілотних сигналів перевищують деякий поріг. Порогове значення формується за допомогою AN 15. AN 15 після прийому повідомлення RUP може вирішити додати або видалити набори в ASET через відправку повідомлення Призначення Каналу Трафіка (ТСА) до AT 14. Подробиці цих процедур сформульовані в стандартах 1xEV-DO, розділ 8. Уявимо, що AT 14 наближається до пікостільника 24, як вказано напрямком, показаного посилальною позицією 32 на Фіг. 1. У деякий момент часу AT 14 приймає пілотні сигнали від пікостільника 24. тобто пілотні сигнали від приймачапередавача 26 з пікостільника 24, що функціонує в діапазонах частот з центром в f1 і f2. Згідно зі стандартами 1xEV-DO, якщо який-небудь пілотний сигнал стільника, про який повідомляє AT 14, досить сильний і перевищує поріг, то AN 15 наказує AT 14 додати стільник, як кандидат, в ASET AT за допомогою повідомлення ТСА. Зокрема, в цьому випадку AT 14, як наказано за допомогою AN 15, повинен включити пілотні набори {24, f1} і {24, f2} як набори кандидатів до свого ASET. Як згадувалося раніше, в заданому користувацькому місцеположенні рівень пілотного сигналу, що приймається AT 14 від стільника 24 в діапазоні частот з центром в f2, набагато вищий, ніж рівень пілотного сигналу в діапазоні частот з центром в f1. Це відбувається через відсутність можливих перешкод з сусідніми стільниками в діапазоні частот з центром в f2. Отже, пілотний набір {24, f2} може бути присутнім в ASET AT 14 набагато раніше, якщо так вибере AN 15, в порівнянні з іншим пілотним набором {24, f1}. Так виходить тому, що рівень пілотного сигналу з пілотного набору {24, f2} перетинає вказаний AN поріг набагато раніше, ніж відповідний рівень пілотного сигналу з пілотного набору {24, f1}, по мірі того, як AT 14 переміщається в напрямку 32. Однак в цьому варіанті здійснення після прийому повідомлення RUP з вищезазначеною інформацією AN 15 не повинен наказувати AT 14 додати пілотний набір {24, f2} до ASET AT 14, коли рівень пілотного сигналу з набору {24, f2} перетинає поріг. Інакше, функціонування AT може бути утруднене. Потрібно відмітити, що існують випадки, що прийняття набору (24, f2} в даний момент може бути можливим, коли певна умова або умови будуть задоволені, але вони будуть описані пізніше. По-перше, крім всього іншого, оскільки AT 14 географічно знаходиться порівняно далеко від пікостільника 24, якщо AT 14 додасть пілотний набір {24, f2} до свого ASET, AT 14 піддається ке 13 руванню потужністю по зворотній лінії зв'язку (RL) пікостільника 24. На далекій відстані AT 14, як наказується пікостільником 24, може знадобитися підняти потужність передачі по RL, тобто лінії зв'язку від AT 14 до пікостільника 24, до дуже високого рівня. Якщо потужність передачі AT 14 в діапазоні частот з центром в f2, істотно вища, ніж потужність передачі в діапазоні частот з центром в f1, це може призвести до перешкод в суміжних каналах з іншими вузлами (наприклад, базовою станцією 12), що функціонують на частоті з центром в f1. Тому переважно, щоб існувало обмеження, яке накладається на різницю потужностей передачі AT 14 по суміжних несучих. Допустимі різниці потужностей передачі залежать, крім всього іншого, від розгортання мережі і рознесення центральних несучих частот. У цьому варіанті здійснення при прийнятті рішення, чи додавати пілотні набори {24, f2} і {24, f1} до ASET AT, AN 15 покладається на перетин порогу більш слабким з наборів пілотних сигналів {24, f1}, замість перетину порогу більш сильним з наборів пілотних сигналів {24, f2}. Тобто попередньо визначений критерій в цьому варіанті здійснення при визначенні, чи знаходиться користувацький об'єкт, такий як AT 14, в додатковій зоні охоплення, основується на тому, чи задовольняє більш слабкий з пілотних наборів попередньо визначеному порогу. Далі посилання зроблене на Фіг. 3 для більш конкретного прикладу. Фіг. 3 графічно показує рівень пілотних сигналів різних пілотних наборів {20, f1}, {24, f1} і {24, f2} в залежності від відстані від приймача-передавача 26 стільника 24. На Фіг. 3 вісь X представляє відстань в метрах між AT 14 і приймачем-передавачем 26 пікостільника 24. Вісь Υ представляє рівень пілотного сигналу як пілотне відношення С/І (несуча/перешкода) в децибелах. Як описано вище, уявимо, що AT 14 спочатку знаходиться в місцеположенні 28. У цей момент часу набір пілотних сигналів {20, f1} вище попередньо визначеного порогу, PilotAdd (додавання пілота), для включення кандидата. Також, набір пілотних сигналів {20, f1} знаходиться в ASET AT 14. Фактично в цьому прикладі в даний момент AT 14 зайнятий активним зв'язком з сектором 20. З іншого боку, інші набори пілотних сигналів, такі як набір {24, f1}, який не приймається AT 14, і набір {24, f2}, який приймається AT 14, але нижчий попередньо визначеного порогу PilotAdd для включення пілота, виключаються з ASET AT 14 як набори кандидатів. По мірі того, як AT 14 наближається до пікостільника 24 в напрямку 32 і досягає місцеположення 36, показаного в Фіг. 3, AT 14 починає збирати пілотний набір {24, f2}. Якщо AT 14 продовжує переміщатися в напрямку 32, в деякий момент часу рівень пілотного сигналу від пілотного набору {24, f2} перевищує поріг PilotAdd. У цьому варіанті здійснення AN 15 не додає пілотний набір {24, f2} до ASET AT 14, коли рівень пілотного сигналу пілотного набору {24, f2} перевищує поріг PilotAdd з причин, вказаних раніше. Уявимо, що AT 14 продовжує переміщатися в напрямку 32 і досягає місцеположення 38, як показано на Фіг. 3. У цей момент часу AT 14 приймає 96889 14 пілотний сигнал з пілотного набору {24, f1}, і рівень пілотного сигналу перевищує поріг PilotAdd включення пілота. AN 15 послідовно додає обидва набори {24, f1} і {24, f2} до ASET AT 14. У цьому прикладі пілотний набір {24, f1} є більш слабким з наборів {24, f1} і {24, f2}. У цьому зразковому варіанті здійснення, як тільки більш слабкий набір {24, f1} перевищує поріг PilotAdd, обидва набори {24, f1} і {24, f2} додаються до ASET AT. Після цього AT 14 може використовувати свій канал зв'язку з пілотним набором {24, f2} для активного зв'язку в діапазоні частот з центром в f2. Крім того, AT 14 може використовувати канал зв'язку або з пілотним набором {24, f1}, або з пілотним набором {20, f1} в діапазоні частот f1 як частину процесу субпроцедури hand-in («вручення») передачі обслуговування пікостільника 24 і сектора 20, відповідно. Оскільки AT 14 переміщається ближче до пікостільника 24, він може зайняти канал зв'язку з будь-яким набором {24, f1} або {24, f2}, або обидва, для активного зв'язку. Уявимо, що AT 14 продовжує переміщатися в напрямку 32 і досягає місцеположення 30. Пілотний набір {20, f1} падає нижче порогу PilotDrop (відкидання пілота) виключення пілота. Як наслідок, AT 14, як наказано AN 15, викидає пілотний набір {20, f1} з ASET як частину процесу субпроцедури передачі обслуговування (hand-out, «позбавлення»). Описане вище є процесами керування наборами, коли AT 14 входить в пікостільник 24. Те ж саме має місце, коли AT 14 залишає пікостільник 24, за винятком того, що етапи вищезазначеного описаного процесу є зворотними. Наприклад, в місцеположенні 30 AT використовує канали з піл отними наборами {24, f1} і {24, f2} для активного зв'язку, а пілотний набір {20, f1} не знаходиться в його ASET. Однак, коли AT 14 досягає місцеположення 40, рівень пілотного сигналу з пілотного набору {20, f1} перевищує поріг PilotAdd, і AN 15 додає пілотний набір {20, f1} до ASET AT 14 як набір кандидатів. Навіть при тому, що пілотний набір (20, f1} доданий до ASET, AT 14 може все ще здійснювати активний зв'язок по каналу зв'язку з набором {24, f1} або {24, f2}, або обома. Однак, як альтернатива, AT 14 може здійснювати активний зв'язок по каналах зв'язку з пілотним набором {24, f2} в діапазоні частот з центром в f2 і пілотним набором {20, f1} в діапазоні частот з центром в f1. Коли AT 14 віддаляється від пікостільника 24 з місцеположення 30 в місцеположення 38 в напрямку, протилежному напрямку 32, AN 15 викидає обидва пілотних набори {24, f1} і {24, f2} з ASET як набори кандидатів AT 14, коли рівень сигналу більш слабкого набору {24, f1} падає нижче порогу PilotDrop виключення пілота як частини процесу субпроцедури hand-out передачі обслуговування, тобто навколо місцеположення 38, як показано на Фіг. 3. У той же самий час, коли пілотний набір {20, f1} перевищує поріг PilotAdd включення пілота, AN 15 додає пілотний набір {20, f1} до ASET AT 14. Після цього AT 14 займає сектор 20 для активного зв'язку, використовуючи пілотний набір {20, f1} як частину процесу субпроцедури «hand-in» передачі обслуговування. 15 У варіанті здійснення, описаному вище, критерієм додавання пілотних наборів {24, f1} і {24, f2} пікостільника 24 до ASET AT 14 є те, коли більш слабкий з наборів {24, f1} перетинає поріг PilotAdd, як визначено хрестоподібною відміткою 50 на Фіг. 3. У іншому варіанті здійснення критерієм додавання пілотних наборів {24, f1} і {24, f2} пікостільника 24 до ASET AT 14 є те, коли рівень пілотного сигналу поточного обслуговуючого сектора або стільника, {20, f1} в цьому випадку, падає нижче порогу PilotDrop, як визначено хрестоподібною відміткою 52, показаною на Фіг. 3. Подібним чином, критерієм видалення пілотних наборів {24, f1} і {24, f2} пікостільника 24 з ASET AT 14 є те, коли наступний доступний сектор або стільник, {20, f1} в цьому випадку, вищий порогу PilotDrop, тобто вище хрестоподібної відмітки 52, показаної на Фіг. 3. Висловлюючись більш широко, критерієм додавання наборів пілотних сигналів додаткової зони охоплення в ASET AT в цьому варіанті здійснення є те, коли всі набори зони перевищують поріг PilotAdd, і в той же самий час рівень пілотного сигналу поточного обслуговуючого сектора або стільника падає нижче порогу PilotDrop. Те ж саме справедливо при видаленні наборів сигналів додаткової зони охоплення з ASET AT, за винятком того, що відповідні умови для критерію протилежні. У ще одному варіанті здійснення критерієм додавання пілотних наборів {24, f1} і {24, f2} пікостільника 24 до ASET AT 14 є те, коли більш слабкий з наборів {24, f1} знаходиться на попередньо визначеному рівні потужності, наприклад, на 2 децибел, вищій рівню сигналу пілотного сигналу, в цей час зайнятого сектора або стільника {20, f1}. У цьому випадку пороговий рівень є таким, як визначено хрестоподібною відміткою 54, показаною на Фіг. 3. Як показано, різниця в рівні потужності, Δ пілотного відношення С/І, встановлена на 2 децибел в цьому прикладі. Подібним же чином критерієм викиду пілотних наборів {24, f1} і {24, f2} пікостільника 24 з ASET AT 14 є те, коли рівень потужності більш слабкого з наборів {24, f1} менший, ніж попередньо визначений рівень потужності, в даному прикладі 2 децибел, ніж відповідний рівень потужності наступного найсильнішого пілотного сигналу, що приймається AT 14, набір {20, f1} в цьому випадку. Для здійснення цього варіанту здійснення AN 15 необхідно порівняти рівень потужності одного позначеного пілотного набору від пікостільника 24 і відповідний рівень потужності набору пілотних сигналів для поточного обслуговуючого сектора або стільника. У попередньому описі були визначені різні потенційні проблеми для сценарію, коли більш сильні з пілотних наборів {24, f2} передчасно додаються до ASET AT 14. Однак, якщо перешкоди суміжного каналу допустимі, або як альтернатива, перешкоди суміжного каналу не є проблемою, в ще одному варіанті здійснення критерієм додавання обох пілотних наборів {24, f1} і {24, f2} пікостільника 24 до ASET AT 14 є те, коли більш сильні з пілотних наборів {24, f2} вищі порогу PilotAdd, як визначено хрестоподібною відміткою 56, показаною на Фіг. 3. Переважно, щоб набори {24, f1} і {24, f2} додавалися в два етапи. Тобто спочатку дода 96889 16 ється набір {24, 12}, коли його рівень сигналу перевищує поріг PilotAdd. Після цього додається набір {24, f1}, коли його рівень сигналу також перевищує поріг PilotAdd. Аналогічно, критерієм викиду обох пілотних наборів {24, f1} і {24, f2} пікостільника 24 з ASET AT 14 є те, коли більш сильні з пілотних наборів {24, f2} нижчі порогу PilotAdd, також як визначено хрестоподібною відміткою 56, показаною на Фіг. 3. Також переважно, щоб набори {24, f1} і {24, f2} викидалися в два етапи. Тобто спочатку викидається набір {24, f1}, коли його рівень сигналу нижчий порогу PilotDrop. Після цього викидається набір {24, f2}, коли його рівень сигналу також нижчий порогу PilotDrop. Ті обставини, коли перешкоди суміжного каналу допустимі або не є великою проблемою, можуть трапитися, наприклад, коли частотне рознесення частот f1 і f2 досить велике. У описі вище AT 14 зображений як багаточастотний пристрій, тобто пристрій, здатний до обробки більше ніж однієї частоти в кожний момент часу. Потрібно відмітити, що користувацький об'єкт, такий як AT 14, може також бути одночастотним пристроєм. У цьому випадку, щоб здійснити вищезазначені варіанти здійснення, AT 14 потрібно виконати частотний перехід з поточної частоти обслуговування на іншу частоту. Далі посилання знов зроблене на Фіг. 1-3 для зразкової ілюстрації. Уявимо, що AT 14 наближається до пікостільника 24 в тому ж самому напрямку 32, але AT 14 в цьому прикладі є одночастотним пристроєм. У або біля місцеположення 28 пілотним набором обслуговуючого стільника або сектора є {20, f1}. По мірі того, як AT 14 наближається до пікостільника 24 в напрямку 32, в деякий момент часу одночастотний AT 14 може виявити сигнал пілотного набору {24, f1}. Як описано раніше, AT 14 постійно посилає повідомлення RUP до AN 15, повідомляючи прийняті пілотні сигнали і їх рівні AN 15. Оскільки рівень сигналу пілотного набору {24, f1} відповідає попередньо визначеному критерію відповідно до кожного з перших трьох варіантів здійснення, описаних раніше, AN 15 посилає повідомлення ТСА в AT 14 для додавання наборів {24, f1} і {24, f2} до ASET AT. AT 14 може потім виконати частотний перехід з f1 на f2 і зайняти пікостільник 24 для активного зв'язку на частоті з центром в f2. Коли одночастотний AT 14 залишає пікостільник 24 в напрямку місцеположення 28, вищезазначений описаний процес по суті завертається і додатково не пояснюється. У останньому згаданому вище варіанті здійснення, тобто варіанті здійснення, в якому позначений набір сигналів, що використовується для перевірки на відповідність попередньо визначеному критерію, є більш сильним з двох наборів в додатковій зоні охоплення, також застосовний доодночастотного AT 14. У цьому випадку, коли AT 14 наближається до пікостільника 24 з місцеположення 28 в напрямку 32, коли пілотний сигнал {20, f1} поточного обслуговуючого сектора або стільника досить слабкий, AT 14 потрібно виконати позачастотний пошук. Таким чином, AT 14 потрібно вимкнути частину апаратного забезпечення, що в цей 17 час обробляють частоту з центром в f1, і перемкнути цю частину апаратного забезпечення для обробки частоти з центром в f2. Позачастотний пошук не повинен бути довгим, наприклад, близько декількох мілісекунд, щоб мінімізувати будь-яке переривання даних поточного сеансу зв'язку. Пошук може періодично повторюватися доти, поки пілотний набір, такий як набір {24, f2} не знайдеться. Після цього AT 14 може виконати частотний перехід, як зображено раніше. Коли одночастотний AT 14 залишає пікостільник 24 в напрямку місцеположення 28, вищезазначений описаний процес по суті завершається і додатково не пояснюється. Варіанти здійснення, як описано вище, застосовні до різнорідного розгортання, як показано і описано на Фіг. 1. Як згадано раніше, описані вище варіанти здійснення також застосовні до макростільникового розгортання. Далі посилання робиться на Фіг. 4, яка схематично показує систему 60 макростільникового розгортання спільно з системою 10 різнорідного розгортання, як зображено раніше. На Фіг. 4 вся система позначена посилальною позицією 70. У макростільниковій системі 60 існує інший інфраструктурний об'єкт зв'язку, базова станція 62, що має приймач-передавач, здатний здійснювати зв'язок на двох частотах з користувацькими об'єктами, такими як AT 14. У цьому прикладі ці дві частоти мають центри в f1 і f3. Базовою станцією 62 може керувати BSC 13 або інша BSC. Базова станція 62 в цьому прикладі також надає охоплення бездротового зв'язку трьом секторам, а саме, секторам 64, 66 і 68. Кожному з секторів 64, 66 і 68 також призначається унікальна PN послідовність для зв'язку з користувацькими об'єктами. Отже, в системі 68 кожний сектор забезпечує два набори пілотних сигналів. Зокрема, сектор 66 забезпечує набори {66, f1} і (66, f2}. Аналогічно, сектор 64 забезпечує набори {64, f1} і {64, f2}. Сектор 68 забезпечує набори {68, f1} і {68, f2}. Всі сектори 64, 66 і 68 в системі 60 макростільникового розгортання також характеризуються як додаткові зони охоплення. Попередньо існуюча частота в цьому прикладі має центр в f1. Частота з центром в f3 є частотою, що надає додаткове охоплення. Позначеною областю охоплення є область, позначена посилальною позицією 65, показаною на Фіг. 4. Керування пілотними наборами для системи 60 макростільникового розгортання по суті подібне до керування для системи 10 різнорідного розгортання. Наприклад, пілотні набори кожного з секторів 64, 66 і 68 можна розглядати так само з точки зору керування наборами, що стосується відповідних наборів пікостільника 30 при функціонуванні в описаних вище варіантах здійснення. З метою ясності і стислості, керування наборами додатково не повторюється для системи 60 макростільникового розгортання. Фіг. 5 і 6 є блок-схемами послідовностей операцій, які узагальнюють процеси керування наборами для інфраструктурного об'єкта і користувацького об'єкта, відповідно, в неоднорідній системі макростільникового розгортання або системі різнорідного розгортання, або їх будь-якої комбінації. Критерій або критерії, показані на блок-схемах 96889 18 послідовностей операцій, є тими ж, як описані в інших варіантах здійснення вище. Фіг. 7 показує частину апаратної реалізації пристрою для виконання процесів керування наборами пілотних сигналів, як описано вище. Електронний пристрій позначений посилальною позицією 290 і може бути реалізований в користувацькому об'єкті, такому як AT 14, і інших інфраструктурних об'єктах, таких як BSC 13, приймач-передавач 26 і базові станції 12 і 62. Пристрій 290 містить центральну шину 292 даних, що з'єднує декілька схем разом. Схеми включають в себе CPU (центральний процесор) або контролер 294, приймач-передавач 295 і блок 300 пам'яті. Приймач-передавач 295 пов'язаний з антеною 297. Якщо пристрій 290 не покладається ні на які бездротові з'єднання для обміну даними, наприклад в BSC 13, яка може тільки використовувати кабелі як канали зв'язку з іншими об'єктами, можна обійтися без антени 297. Приймач-передавач 295 включає в себе передавач 296 і приймач 298. Приймач-передавач 297 в основному обробляє і перетворює високочастотні (HF) сигнали в сигнали основного діапазону, і навпаки, за допомогою передавача 296 і приймача 298. Приймач 298, в свою чергу, обробляє і буферизує прийняті сигнали перед відправкою в шину 292 даних. З іншого боку, передавач 296 обробляє і буферизує дані від шини 292 даних перед відправкою з пристрою 290. Для одночастотного пристрою 290 в приймачпередавач 295 можуть бути включені один передавач 296 і один приймач 298. CPU/контролер 294 керує відповідним хронуванням, виділяючи часові слоти для визначення і обробки даних для інших діапазонів частот для приймача-передавача 295. Для багаточастотного пристрою 290 в приймач-передавач 295 можуть бути включені більше, ніж один передавач 296 і більше, ніж один приймач 298 (не показані на Фіг. 7). CPU/контролер 294 керує декількома передавачами 296 і приймачами 298 для виявлення і/або обробки сигналів від різних діапазонів частот. Потрібно відмітити, що частина приймачапередавача 295 може бути виконана як зовнішня схема, така як зовнішній модем, що підключається до пристрою 290. Крім того, CPU/контролер 294 виконує функцію керування даними шини 292 даних і функцію загальної обробки даних, включаючи виконання вмісту інструкцій в блоці 300 пам'яті. Блок 300 пам'яті включає в себе ряд модулів і/або інструкцій, спільно позначених посилальною позицією 302. У цьому варіанті здійснення модулі/інструкції включають в себе, крім іншого, функціональний блок 310 керування набором. Функціональний блок 310 включає в себе комп'ютерні інструкції або код для виконання етапів процесу, як показано і описано на Фіг. 1-6. Конкретні інструкції, що залежать від об'єкта, можуть бути вибірково здійснені в функціональному блоці 310. Наприклад, якщо пристрій 290 є частиною AT, крім іншого, інструкції, характерні для етапів процесу AT, як показано і описано на Фіг. 1-4 і 6, можуть 19 бути закодовані в функціональному блоці 310. Подібним чином, якщо пристрій 290 є частиною об'єкта зв'язку, наприклад, інфраструктурного об'єкта, такого як BSC 13 або базова станція 12 або 62, етапи процесу, характерні для цього об'єкта зв'язку, можуть бути закодовані в функціональному блоці 310. Крім того, якщо пристрій 290 є частиною AT, ASET, позначений посилальною позицією 398, може бути включений в пам'ять 300, як показано на Фіг. 7. Як альтернатива, ASET 398 може бути збережений в одному або більше інших блоках пам'яті, відмінних від блока 300. У цьому варіанті здійснення блок 300 пам'яті є схемою RAM (Пам'ять Довільного Доступу). Зразкові функціональні блоки, такі як функціональні блоки 308 і 310 передачі обслуговування, є підпрограмами програмного забезпечення, модулями і/або наборами даних. Блок 300 пам'яті може бути прив'язаний до іншої схеми пам'яті (не показано), який може або бути енергозалежного або енергонезалежного типу. Як альтернатива, блок 300 пам'яті може бути зроблений з інших типів схем, таких як EEPROM (Електрично Стирана Пам'ять, Що Програмується Тільки для Читання), EPROM (Електрична Пам'ять, Що Програмується Тільки для Читання), ROM (Пам'ять Тільки для Читання), ASIC (Спеціалізована Інтегральна Схема), магнітного диска, оптичного диска і інших, відомих в техніці. Крім того, блок 300 пам'яті може бути комбінацією ASIC і схеми пам'яті енергозалежного типу і/або енергонезалежного типу. Потрібно додатково відмітити, що винахідницькі процеси, подібні до описаних, можуть також бути закодовані як комп'ютерозчитувані інструкції, які переносяться будь-яким комп'ютерзчитуваним носієм, відомим в техніці. У даному описі і прикладеній формулі термін "комп'ютерзчитуваний носій" належить до будь-якого носія, який бере участь в наданні інструкцій будь-якому процесору, такому як CPU/контролер 294, показаний і описаний на кресленні Фіг. 6, для виконання. Такий носій може мати тип сховища і може приймати форму енергозалежного або енергонезалежного запам'ятовуючого носія, як також описаний раніше, наприклад, в 96889 20 описі блока 300 пам'яті на Фіг. 7. Такий носій може також мати тип передачі і може включати в себе коаксіальний кабель, мідний провід, оптичний кабель і повітряний інтерфейс, який несуче акустичні, електромагнітні або оптичні хвилі, здатні до перенесення сигналів, що зчитуються машинами або комп'ютерами. Комп'ютерозчитуваний носій може бути частиною комп'ютерного продукту, окремого від пристрою 290. Нарешті, можливі інші зміни в рамках об'єму винаходу. У зразкових варіантах здійснення, як описано, об'єкт в складі AN 15, такий як BSC 13 або об'єкти 12, 62, 17 або 26, зображений як об'єкт, який визначає, які пілотні набори повинні бути включені в ASET AT 14. Очевидно, можливо, що AT 14 може зробити таке визначення. У цьому випадку виконання функції визначення, наприклад, за допомогою підпрограм програмного забезпечення, може бути встановлене в AT 14 замість AN 15. Крім того, в зразкових варіантах здійснення кожна додаткова зона охоплення описана з метою ілюстрації як така, що мас два набори пілотних сигналів. Очевидно, можливі більше ніж два набори пілотних сигналів. Крім того, AN 15 може вибірково вибрати будь-який один з, будь-яку комбінацію, або всі ці більше ніж два набори пілотних сигналів для додавання до або видалення з ASET AT 14. AN 15 може зробити такий вибір на основі чинників, таких як завантаження каналу, стан каналу і т. д. Крім того, операції різних варіантів здійснення зображені окремо відносно системи 10 різнорідного розгортання і системи 60 макростільникового розгортання. Ці дві системи 10 і 60 можуть очевидним чином бути об'єднані. Наприклад, система 60 макростільникового розгортання може очевидним чином включати в себе додаткові зони охоплення, такі як пікостільник 24 і активна ділянка 21. Будь-які інші логічні блоки, схеми і етапи алгоритму, описані спільно з варіантом здійснення, можуть бути здійснені в апаратному забезпеченні, програмному забезпеченні, програмованому обладнанні або їх комбінаціях. Фахівцям буде очевидно, що тези і інші зміни форми і подробиць можуть бути зроблені в них, не відступаючи від об'єму і суті винаходу. 21 96889 22 23 Комп’ютерна верстка Т. Чепелева 96889 Підписне 24 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPilot-signal set management in a multi-carrier communication system
Автори англійськоюRezaiifar, Ramin, Lott, Christopher, G., Ghosh, Donna, Black, Peter, J., Attar, Rashid Ahmed A.
Назва патенту російськоюУправление наборами пилот-сигнлов в системе связи с несколькими несущими
Автори російськоюРезайифар Рамин, Лотт Кристофер Дж., Гхош Донна, Блек Питер Дж., Аттар Рашид Ахмед А.
МПК / Мітки
МПК: H04W 36/04
Мітки: пілотних, несучими, зв'язку, сигналів, декількома, керування, системі, наборами
Код посилання
<a href="https://ua.patents.su/12-96889-keruvannya-naborami-pilotnikh-signaliv-v-sistemi-zvyazku-z-dekilkoma-nesuchimi.html" target="_blank" rel="follow" title="База патентів України">Керування наборами пілотних сигналів в системі зв’язку з декількома несучими</a>
Пристрій для поліпшення передачі обслуговування між секторами і/або між стільниками в системі безпровідного зв’язку з декількома несучими (варіанти)
Номер патенту: 91498
Опубліковано: 10.08.2010
Автори: Лейн Френк А., Лароя Раджив
МПК: H04B 1/38
Мітки: декількома, безпровідного, варіанти, секторами, обслуговування, стільниками, несучими, передачі, пристрій, системі, поліпшення, зв'язку
Формула / Реферат:
1. Пристрій для керування передавальним пристроєм базової станції, що містить:процесор, виконаний з можливістю:і) передавати у першій смузі частот протягом першого періоду часу, протягом якого згаданий передавальний пристрій базової станції не передає в другій смузі частот; ііі) передавати у другій смузі частот протягом другого періоду часу, який коротший, ніж згаданий перший період часу, при цьому згаданий передавальний...
Групування пілот-сигналів і керування наборами в системах зв’язку з множиною несучих
Номер патенту: 92003
Опубліковано: 27.09.2010
Автори: Агаше Параг Арун, Резайіфар Рамін
МПК: H04W 28/16
Мітки: керування, групування, системах, множиною, пілот-сигналів, наборами, зв'язку, несучих
Формула / Реферат:
1. Спосіб безпровідного зв'язку, що міститьприйом множини пілот-сигналів, асоційованих із сектором, причому кожний пілот-сигнал має ідентифікатор групи;при цьому ідентифікатор групи присвоюють кожному пілот-сигналу, основаному на зоні покриття пілот-сигналу, таким чином, що пілот-сигналам, які мають порівнянні зони покриття, присвоюють однаковий ідентифікатор групи;групування пілот-сигналів в одну або більше груп...
Спосіб і пристрій для передачі звіту і керування комірками в системі з багатьма несучими
Номер патенту: 96391
Опубліковано: 25.10.2011
Автори: Чжан Даньлу, Явуз Мехмет, Моханті Бібху, Самбхвані Шарад Діпек, Голмієх Азіз
МПК: H04L 1/00, H04L 5/00, H04W 52/00
Мітки: комірками, пристрій, керування, багатьма, системі, несучими, передачі, звіту, спосіб
Формула / Реферат:
1. Спосіб полегшення керування комірками в системі з багатьма несучими для термінала доступу в бездротовій мережі, який включає етапи:використання процесора для виконання виконуваних комп'ютером команд, що зберігаються на комп'ютерозчитуваному носії даних, для реалізації наступних дій:здійснюють зв'язок з базовою станцією за допомогою щонайменше однієї з несучої з прив'язкою або додаткової несучої;приймають сигнали за...
Спосіб і пристрій для безпровідного зв’язку з декількома несучими
Номер патенту: 94407
Опубліковано: 10.05.2011
Автори: Дамняновіч Алєксандер, Касаччія Лоренцо
МПК: H04J 3/24, H04W 28/16
Мітки: спосіб, декількома, безпровідного, несучими, пристрій, зв'язку
Формула / Реферат:
1. Пристрій для безпровідного зв'язку з декількома несучими, який містить щонайменше один процесор для прийому у рухомій станції призначеннямножини несучих для першої лінії зв'язку в мережі глобальної системи мобільного зв'язку (ГСМЗ), для прийому у рухомій станції призначення щонайменше однієї несучої для другої лінії зв'язку в мережі ГСМЗ і для обміну даними за допомогою рухомої станції з мережею ГСМЗ через множину несучих для...
Способи і пристрій для розв’язання конфліктів коду пілотних псевдовипадкових перешкод в системі зв’язку
Номер патенту: 93968
Опубліковано: 25.03.2011
Автори: Пракаш Раджат, Улупінар Фатіх, Даял Пранав, Горохов Алєксєй
МПК: H04Q 5/00, H04L 5/00, H04B 3/54
Мітки: зв'язку, конфліктів, перешкод, пристрій, коду, пілотних, системі, способи, псевдовипадкових, розв'язання
Формула / Реферат:
1. Спосіб виділення кодів PilotPN в системі зв'язку, причому спосіб включає етапи, на яких:визначають (502) набір з множини точок доступу;визначають (504) набір кодів PilotPN, що використовуються набором з множини точок доступу;виявляють (506), чи мають щонайменше дві точки доступу з множини точок доступу конфліктуючі коди PilotPN;виділяють (508) перший код PilotPN однієї з щонайменше двох точок доступу, що мають...
Попередній патент: Дозувально-фасувальний пристрій для порошкоподібної сипкої продукції
Наступний патент: Спосіб виробництва термокислотного сиру
Випадковий патент: Препарат комплексний пробіотично-сорбційний для лікування гнійних ран у котів "ділаксил"