Спосіб формування змінних напруг із заданим відношенням
Номер патенту: 102277
Опубліковано: 25.06.2013
Формула / Реферат
1. Спосіб формування змінних напруг із заданим відношенням, відповідно до якого формують опорну змінну напругу ![]() і регульовану змінну напругу
і регульовану змінну напругу ![]() , яка знаходиться в заданому відношенні з опорною змінною напругою
, яка знаходиться в заданому відношенні з опорною змінною напругою ![]() , який відрізняється тим, що регульовану змінну напругу
, який відрізняється тим, що регульовану змінну напругу ![]() формують шляхом додавання двох допоміжних змінних напруг
формують шляхом додавання двох допоміжних змінних напруг ![]() і
і ![]() , фазу кожної з яких змінюють за заданим законом.
, фазу кожної з яких змінюють за заданим законом.
2. Спосіб за п. 1, який відрізняється тим, що амплітуди допоміжних напруг ![]() і
і ![]() вибирають рівними одна одній.
вибирають рівними одна одній.
3. Спосіб за п. 2, який відрізняється тим, що фази допоміжних напруг ![]() і
і ![]() змінюють на однакові за абсолютним значенням і протилежні за знаком величини
змінюють на однакові за абсолютним значенням і протилежні за знаком величини ![]() і
і ![]() .
.
4. Спосіб за п. 3, який відрізняється тим, що фазу однієї з допоміжних напруг ![]() або
або ![]() додатково змінюють на величину
додатково змінюють на величину ![]() .
.
5. Спосіб за п. 2, який відрізняється тим, що зміни амплітуди напруги ![]() проводять у діапазоні, обмеженому нерівністю
проводять у діапазоні, обмеженому нерівністю ![]() де
де ![]() .
.
6. Спосіб за п. 3 або п. 4, який відрізняється тим, що фази допоміжних напруг ![]() і
і ![]() додатково змінюють на однакову за модулем і однакову за знаком величину
додатково змінюють на однакову за модулем і однакову за знаком величину ![]() .
.
7. Спосіб за п. 3 або п. 4, який відрізняється тим, що фазу опорної напруги додатково змінюють на величину ![]() .
.
8. Спосіб за пп. 2-7, який відрізняється тим, що амплітуди допоміжних напруг ![]() і
і ![]() вибирають рівними амплітуді опорної напруги
вибирають рівними амплітуді опорної напруги ![]() .
.
9. Спосіб за п. 8, який відрізняється тим, що почергово калібрують відношення кожної з допоміжних напруг до опорної, для чого допоміжну калібровану напругу встановлюють у протифазі до опорної, а іншу допоміжну напругу вимикають, після чого похибку відношення допоміжної каліброваної напруги до опорної визначають методом перестановок, а знайдені значення відхилення відношень каліброваної напруги від номінальних значень використовують при розрахунку результату вимірювання параметрів імпедансу.
10. Спосіб за п. 8, який відрізняється тим, що для калібрування відношення регульованої напруги ![]() і опорної напруги
і опорної напруги ![]() допоміжні напруги
допоміжні напруги ![]() і
і ![]() встановлюють у протифазі, після чого визначають відношення регульованої напруги
встановлюють у протифазі, після чого визначають відношення регульованої напруги ![]() до опорної напруги
до опорної напруги ![]() , а знайдені значення відхилення відношень каліброваної напруги від номінальних значень використовують при розрахунку результату вимірювання параметрів імпедансу.
, а знайдені значення відхилення відношень каліброваної напруги від номінальних значень використовують при розрахунку результату вимірювання параметрів імпедансу.
Текст
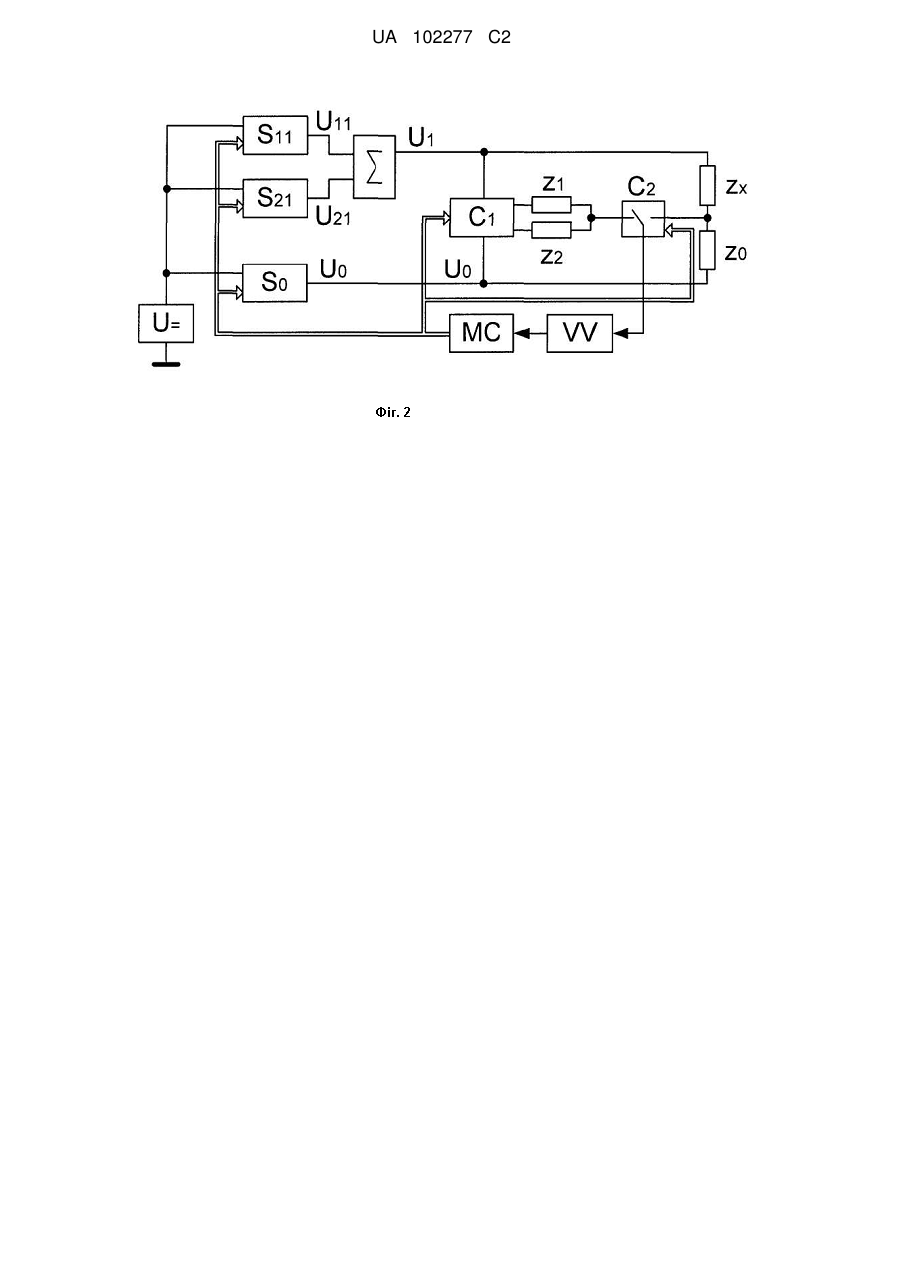
Реферат: Спосіб формування змінної напруги із заданим відношенням, за яким формують опорну змінну напругу U0 і регульовану змінну напругу U1 , що знаходиться в заданому відношенні з опорною змінною напругою U0 , причому регульовану змінну напругу U1 формують шляхом складання двох допоміжних змінних напруг U11 і U12 , фазу кожної з яких змінюють за заданим законом. UA 102277 C2 (12) UA 102277 C2 UA 102277 C2 5 10 15 20 25 30 35 40 45 50 55 Запропонований спосіб формування змінних напруг із заданим відношенням стосується вимірювальної техніки, точніше галузі вимірювання параметрів комплексних опорів. Завдання формування змінних напруг із заданим відношенням полягає у створенні двох (або більше) напруг, відношення яких регулюється, а закономірність регулювання цього відношення відома з високою точністю. Для формування змінних напруг із заданим відношенням у вимірювальній техніці використовуються різні типи дільників. Такі дільники є основою побудови різноманітних високоточних мостів змінного струму, призначених для вимірювання параметрів імпедансу [A.M. Jeffery, J. Shields, S. Shields, L.H. Lee, New Multi-frequency Bridge at NIST, BNM-LCIE, 1998, pp. G1-G37]. Дільники використовуються також у ряді інших галузей науки і техніки. Відомий спосіб формування змінних напруг із заданим відношенням, заснований на використанні дільників напруги, які складаються з двох послідовно включених комплексних опорів (резисторів, конденсаторів). Одне з плечей такого дільника регулюється за заданим законом для отримання необхідного відношення напруг [Орнатский ПП. Автоматические измерения и приборы (аналоговые и цифровые), 1986., 504 с]. Недоліком такого способу є невисока точність, спричинена тим, що коефіцієнт ділення таких дільників залежить як від точності виконаних вимірювань, так і від навантаження, від впливу паразитних параметрів: опорів провідників і комутаторів, паразитних ємностей. Відомі також різні типи резистивних сходових дільників [AD5543, AD5544 Data Sheets]. Ці 4 5 перетворювачі не мають необхідної точності, їх похибка в кращому разі складає 10- -10- , що абсолютно недостатньо для точних вимірювань. Відомий спосіб формування двох змінних напруг із заданим відношенням за допомогою трансформатора, причому задане відношення першої змінної напруги на первинній обмотці трансформатора відносно другої змінної напруги на вторинній обмотці трансформатора (так званий коефіцієнт ділення K d ) отримують зміною кількості витків вторинної обмотки трансформатора. При цьому коефіцієнт ділення K d дорівнює відношенню кількостей витків n1 і n2 первинної та вторинної обмоток трансформатора, відповідно K d n1 / n2 [Kibble В.Р., Rayner G.H., Coaxial AC Bridges.,; Adam Hilger Ltd., Bristol, 1984, p. 203 p]. Для достатньо плавного регулювання величини відношення вихідної напруги дільника необхідно плавно змінювати кількість витків вторинної обмотки трансформатора. Це дуже ускладнює конструкцію трансформатора, оскільки замість однієї обмотки він повинен містити дуже велику кількість (яка визначається дискретністю регулювання) обмоток і, відповідно, дуже велику кількість комутаторів. Сам дільник перетворюється на складний і громіздкий пристрій (див., наприклад, добре відомий багатодекадний дільник Кельвіна - Варлея [An inductive decade divider of low output impedance, A J Binnie 1964 J. Sci. Instrum]. Проте використання трансформаторів з тісним 6 9 індуктивним зв'язком дозволяє виконати ділення напруги з похибкою менше 10- -10- . Зазвичай для досягнення такої точності проводять автоматичне або ручне калібрування дільника [ESI DT72A, RT23R, RT2779R, Technical Decription, Fluke Gohn 80B]. Основним недоліком відомого способу формування змінних напруг із заданим відношенням є те, що для його реалізації необхідно використовувати трансформатори з тісним індуктивним зв'язком, які мають великі габарити та вагу і працюють лише у вузькому діапазоні частот. Такі трансформатори не піддаються мікромініатюризації. Найближчим аналогом запропонованого способу є спосіб формування двох змінних напруг із заданим відношенням за допомогою трансформатора з тісним індуктивним зв'язком, який має одну первинну і дві вторинні обмотки [Kibble В.P., Rayner G.H., Coaxial AC Bridges; Adam Hilger Ltd., Bristol, 1984, p. 203 p.], причому коефіцієнт ділення K d в цьому випадку дорівнює відношенню змінної напруги на вторинній обмотці з незмінною кількістю витків (опорної змінної напруги) до змінної напруги на іншій вторинній обмотці, виконаній з можливістю зміни кількості витків (регульованої змінної напруги), і співпадає з відношенням кількостей витків цих двох вторинних обмоток трансформатора. Такий спосіб ділення напруги дозволяє побудувати високоточні дільники. Недоліком цього способу є те, що для його реалізації необхідно використовувати трансформатори з тісним індуктивним зв'язком, які мають великі габарити, вагу і вартість. В області низьких частот динамічний діапазон напруги такого дільника зменшується обернено пропорційно до частоти, що призводить до різкого зниження чутливості апаратури, в якій використовуються такі дільники. Похибка таких дільників також обернено пропорційна до частоти. Тому в області низьких частот такі дільники просто неможливо реалізувати. 1 UA 102277 C2 5 10 15 20 25 30 35 40 45 50 55 Іншим недоліком відомого способу формування напруг із заданим відношенням є те, що він дозволяє реалізувати тільки таке відношення напруг, яке описується дійсним числом. Тим часом для зрівноваження моста змінного струму зазвичай необхідним є джерело напруги, яке генерує напругу, відношення якої є заданим комплексним числом. Для вирішення цього завдання зазвичай використовують два трансформатори з тісним індуктивним зв'язком з регульованими коефіцієнтами передачі і прецизійний квадратурний фазообертач. Останній пристрій непросто реалізувати як такий, а якщо необхідно зменшити його похибку до величин 5 6 10- -10- , то його реалізація перетворюється на складну технічну проблему. Завданням запропонованого винаходу є створення такого способу формування змінних напруг із заданим комплексним відношенням, при якому досягається необхідна висока точність в широкому діапазоні частот (насамперед - низьких), розширюються його функціональні можливості і знімаються принципові фізичні і технічні обмеження на істотне зменшення габаритів, маси і вартості елементів і вузлів, які реалізовують запропонований спосіб. Це завдання вирішується за рахунок того, що зміну амплітуди регульованої змінної напруги, необхідну для досягнення його заданого відношення до опорної напруги, здійснюють шляхом додавання двох допоміжних змінних напруг з постійними амплітудами, фазу кожної з яких змінюють відповідно до заданого закону. Для зміни амплітуди регульованої змінної напруги фази допоміжної напруги одночасно змінюють на однакові за абсолютним значенням і протилежні за знаком величини ψ і -ψ. Зміна амплітуди регульованої змінної напруги може бути досягнута також шляхом одночасної зміни фаз допоміжної напруги на величини ψ і . У процесі формування змінних напруг із заданим відношенням діапазон зміни амплітуди регульованої змінної напруги U1 доцільно обмежити нерівністю 0 U1 kU 0 де k 2 . У процесі формування змінних напруг із заданим відношенням різниця фаз φ між опорною і регульованою за амплітудою напругою можна змінювати на величину α, змінюючи на цю величину α фазу опорної напруги або, альтернативно, змінюючи на величину -α фазу допоміжної напруги. Калібрування відношення змінних напруг проводять, калібруючи почергово відношення кожної з допоміжних напруг до опорної, для чого допоміжну напругу, яку калібрують, встановлюють протифазною до опорної, а іншу допоміжну напругу вимикають, після чого похибку відношення допоміжної напруги, що калібрують, до опорної визначають методом перестановок. Для калібрування відношення змінних напруг із заданим відношенням встановлюють допоміжні змінні напруги у протифазі, після чого визначають відношення регульованої сумарної напруги до опорної. Описані калібрування доцільно проводити для допоміжних змінних напруг з амплітудами, які номінально дорівнюють амплітуді опорної напруги. Запропонований спосіб формування напруг із заданим відношенням дозволяє створювати дільники, маса яких в тисячі і десятки тисяч разів менша від маси існуючих дільників. Частотний діапазон цих дільників простягається в область низьких частот практично до нуля. При цьому дільники, побудовані відповідно до запропонованого способу, в області звукових частот не поступаються точністю найбільш точним існуючим дільникам. На Фіг. 1 зображені векторні діаграми, які пояснюють запропонований спосіб формування змінних напруг із заданим відношенням. На Фіг. 2 подана одна з можливих функціональних схем моста змінного струму, в якому формування змінних напруг із заданим відношенням виконується відповідно до заявленого способу. На Фіг. 3 подана функціональна схема моста змінного струму, на прикладі якої пояснюється процедура калібрування відповідно до заявленого способу. Фіг. 1 пояснює запропонований спосіб формування змінних напруг із заданим відношенням. Змінні напруги на діаграмі представлені векторами, довжини яких пропорційні до амплітуд цих напруг, а кути, відкладені від осі абсцис в напрямку проти годинникової стрілки, дорівнюють початковим фазам цих напруг. Початкова фаза опорної змінної напруги U0 прийнята рівною нулю і відповідний вектор U0 співпадає з віссю абсцис. Дві допоміжні змінні напруги U11 і U12 можуть, в принципі, мати будь-які амплітуди і початкові фази, але, оскільки бажано, щоб їх амплітуда була однаковою і дорівнювала амплітуді опорної змінної напруги U0, тобто U11 U12 U0 , на діаграмі вони представлені векторами U і U однакових довжин, що 11 12 дорівнюють довжині вектора U0. 2 UA 102277 C2 Регульована змінна напруга U1 може бути отримана додаванням допоміжних змінних напруг U11 і U12. При цьому відповідний вектор U1 буде напрямлений уздовж бісектриси кута між векторами напруги U11 і U12. Змінюючи одночасно фази допоміжних напруг U11 і U12 на однакові за абсолютним значенням і протилежні за знаком величини в межах від 0 до / 2 і до / 2 5 відповідно, можна змінювати амплітуду регульованої змінної напруги U1 в межах від 2 U0 до 0 без зміни її фазового зсуву φ відносно опорної змінної напруги U0. На діаграмі Фіг. 1а це відповідає зміні довжини вектора U1 без зміни його напрямку, а значить і кута φ, який вектор U1 утворює з вектором опорної змінної напруги U . 0 10 15 20 25 30 35 40 45 50 Модуль вектора U1 очевидно буде дорівнювати U1 2 U0 cos , тобто миттєве значення регульованої змінної напруги U1 дорівнює U1 2U0 cos t . (1a) Регульована змінна напруга U1 може бути також різницею напруг U11 і U12, яка, як відомо, може бути замінена сумою векторів U11 і -U12. Вектор -U12 можна отримати з вектора U12 змінивши фазу останнього на величину π. Різницевий вектор U1 , який відповідає цій напрузі, буде перпендикулярним до бісектриси кута між векторами напруги U11 і U12 (Фіг. 1б), а його модуль буде дорівнювати U1 2 U0 sin тобто миттєве значення регульованої змінної напруги U1 в цьому випадку дорівнює U1 2U0 sin t . (1б) З рівнянь (1а, 1б) видно, що змінюючи одночасно на одну й ту ж саму абсолютну величину ψ фазу допоміжної змінної напруги U11 і U12 в протилежних напрямах, можна змінювати модуль регульованої напруги U1 в межах від +2U0 до 0. При цьому напрямок вектора U1 залишається незмінним. Не змінюється при цьому і початкова фаза φ регульованої змінної напруги U1, яка дорівнює куту φ між вектором U1 і віссю абсцис. Початкову фазу φ регульованої змінної напруги U1 можна змінювати на наперед задану величину без зміни модуля регульованої напруги U1 змінюючи на одну і ту ж величину -α фазу допоміжних змінних напруг U11 і U12. На діаграмах Фіг. 1 це відповідає одночасному повороту в одному і тому ж напрямку та на одну й ту ж саму величину векторів U11 і U12, а разом з ними і вектора U1 без зміни його довжини. Альтернативно, початкову фазу регульованої змінної напруги U1 відносно опорної змінної напруги U0 можна змінювати змінюючи на величину α початкової фази самої опорної змінної напруги U0. Таким чином, запропонований спосіб дає можливість маніпулюючи тільки початковими фазами допоміжних змінних напруг U11 і U12, відрахованими від початкової фази опорної змінної напруги U0, змінювати незалежно як амплітуду так і фазу регульованої змінної напруги U1. Іншими словами, спосіб дозволяє змінюючи тільки фази допоміжних змінних напруг незмінної амплітуди U11 і U12 сформувати регульовану змінну напругу U1 із заданою амплітудою, яка лежить в межах 0 U1 2U0 , де U0 - амплітуда змінної опорної напруги, та з будь-якою наперед заданою початковою фазою. Похибка зміни фази змінної напруги у відповідних пристроях [Corney, A.C., Digital Generator Assisted Impedance Bridge, CPEM 2002, Conference Digest, pp. 176-177] принципово обмежується лише фазовими шумами. Ці шуми в сучасних пристроях цифрової техніки можуть 9 бути зменшені до величин 10- і нижче. Такою ж є і теоретична межа похибки зміни амплітуди регульованої змінної напруги за допомогою зміни початкових фаз допоміжних змінних напруг. Очевидно, що залежність амплітуди регульованої змінної напруги U1 від ψ є нелінійною. Нелінійність цієї залежності як така не має істотного значення, оскільки вона є строго розрахунковою. Проте крутизна цієї залежності змінюється від нуля (при ψ=0 при формуванні регульованої змінної напруги U1 шляхом додавання допоміжних змінних напруг і при ψ = ±90° при формуванні регульованої змінної напруги U1 шляхом віднімання допоміжних змінних напруг) до максимального значення (при ψ = ±90° для додавання і при ψ = ±0 при відніманні допоміжних змінних напруг). U1 Ф може створити проблеми в процесі Нульова крутизна залежності зрівноважування моста. Тому раціонально обмежити діапазон зміни регульованої змінної напруги U1 нерівністю U1 2 U 0 . За такого обмеження ( 45 90 при додаванні 3 UA 102277 C2 допоміжних змінних напруг і 0 45 при їх відніманні) крутизна функції змінюється не більше, ніж вдвічі, що вже не створює труднощів при автоматизації моста. При цьому лише 5 10 15 20 25 30 35 40 45 50 55 трохи, в 2 разів, звужується діапазон зміни амплітуди напруги U1 і відповідно, діапазон вимірювання імпедансу мостом, в якому такий дільник використовується. Відзначимо, що описані набори допоміжних змінних напруг не є єдино можливими для реалізації способу. Вони є простими, вимагають для своєї реалізації мінімуму апаратури; і як буде показано далі, простим є також процес калібрування мостів, побудованих з використанням таких напруг. Для отримання високої точності тут важливе те, що зміна амплітуди змінної напруги зрівноважуючого сигналу проводиться за допомогою зміни тільки фази допоміжних сигналів. Цифрові технології сьогодні дозволяють легко синтезувати квазісинусоїдальні сигнали, які відображаються уведеними вище векторами. Формування квазісинусоїдального сигналу із заданою амплітудою і фазою реалізується на пристроях, які називаються синтезаторами [Cabiati, F., Bosco, G.C., "L-C Comparison System Based On Two-Phase Generator", IEEE Trans. Instrum. Meas., 1985. 34, N.2, pp. 344-349]. Синтезатор формує ступінчасто апроксимований синусоїдальний сигнал, амплітуда якого пропорційна до постійної вхідної напруги, а фаза визначається фазою сигналу керування і легко регулюється. Похибка формування таких сигналів за модулем і фазою в діапазоні звукових частот 4 5 зазвичай лежить в межах 5 10 5 10 . Очевидно, що така точність синтезатора синусоїдального сигналу не дозволяє використовувати його для прецизійних вимірювань. Проте цифровий синтезатор дозволяє з високою точністю змінювати фазу сигналу. Похибка зміни фази сигналу в таких пристроях визначається лише їх фазовими шумами, які можуть бути, в 8 9 принципі, понижені до величин близько 10- -10- і менше. Тому, при формуванні синусоїдального сигналу відповідно до рівнянь (1а) або (1б), його прирости можуть бути сформовані з дуже високою точністю, що дорівнює точності зміни фази. Короткочасна нестабільність параметрів таких синтезаторів на проміжок часу потрібний для вимірювання (менше 1 хвилини) може бути відомими засобами (вибором відповідних елементів, 8 термостатуванням синтезаторів та мір тощо) понижена до величин 10- і менше. Це дозволяє, в принципі, на основі таких синтезаторів, створювати високоточні мости змінного струму. Таким чином, технічно завдання побудови прецизійного моста змінного струму, в якому для зрівноважування використовується регулювання амплітуди і фази змінної напруги шляхом зміни фаз допоміжних змінних напруг незмінної амплітуди, зводиться, насамперед, до вибору структури моста і способу його калібрування, які дозволили б мінімізувати вплив похибок синтезаторів за модулем і фазою на результат вимірювання. На Фіг. 2 представлена одна з можливих структур моста змінного струму, побудованого на основі формувача змінних напруг із заданим відношенням з фазовим регулюванням і калібруванням його вузлів. Міст включає три синтезатори S11, S21, S0, на входи яких подають опорну напругу від джерела опорної постійної напруги U. Змінну напругу з виходів синтезаторів S11, і S21 додають (віднімають) за допомогою суматора Σ. Між виходами суматора Σ і синтезатора S0 включають послідовно з'єднані порівнювані імпеданси таким чином, що до виходу синтезатора S0 підключають еталонну міру Z0, а до виходу суматора Σ підключають об'єкт вимірювання Zx або навпаки. Середня точка з'єднання цих елементів є виходом моста. Між виходами суматора Σ і синтезатора S0 підключають також калібрувальний ланцюг, який складається з двох послідовно з'єднаних еталонних мір Z1 і Z2 (наприклад, двох еталонних резисторів R1 і R2) та комутатора С1, який в процесі калібрування змінює полярність підключення калібрувального ланцюга до суматора Σ і синтезатора S0. Векторним вольтметром VV вимірюють змінну напругу сигналу нерівноваги калібрувального ланцюга або сигналу нерівноваги моста і детектують його, виділяючи, наприклад, дві його ортогональні складові в деякому ортогональному базисі. Для цього його підключають до виходу відповідного моста за допомогою комутатора С2. Мікроконтролер МС отримує результат вимірювання від векторного вольтметра, проводить його обробку і на цій основі керує процесами калібрування і урівноваження моста, змінюючи фази допоміжної змінних напруг на виходах синтезаторів S11, та S21 і, отже, змінні вихідні напруги синтезаторів S11 і S21. Вищеописаний міст дозволяє здійснити запропонований спосіб таким чином. За допомогою синтезатора S0 формують опорну змінну напругу синусоїдальної форми U0 (якій на Фіг. 1 відповідає вектор U0, напрямок якого співпадає з віссю абсцис). За допомогою синтезаторів S11, і S21 формують дві допоміжні синусоїдальні змінні напруги однакової амплітуди U11 і U21 (яким 4 UA 102277 C2 відповідають вектори U11 і U21 на Фіг. 1) і направляють їх на суматор, на виході якого формують регульовану змінну синусоїдальну напругу U1 із заданою амплітудою і початковою фазою φ (якій 5 10 на Фіг. 1 відповідає або вектор U1 або вектор U1 залежно від того, додають або віднімають напруги U11 і U21), миттєве значення якої визначається або рівнянням (1а) у разі додавання допоміжних змінних напруг U11 і U21 або рівнянням (1б) у разі віднімання допоміжних змінних напруг U11 і U21. Ясно, що для отримання на виході суматора результату віднімання досить фазу одної з допоміжних напруг U11 або U12 перед їх додаванням додатково змінити на величину π. Як відомо, умова рівноваги моста має вигляд: U1 Z x U0 Z 0 . (2) З урахуванням похибок формування напруги синтезаторами рівняння рівноваги (2) можна переписати в наступній формі: U1 U11н U11 U0 де U0 U21 U21 U0 U11н U0 U11 U0 U21н U0 U21 U0 Zx Z0 , (3) U11н , і U 21н - номінальні значення комплексної змінної напруги U11 і U21 ; 15 20 25 30 35 U11 і U21 - відхилення значень комплексної змінної напруги U11 і U21 від їх номінальних значень. Тут в процесі урівноваження за допомогою керування фази змінюють на однакову величину U11н U21н U11 U21 11 21 U0 і U0 . Тому для фази (фазові кути) як величини U0 і U0 так і величини виключення впливу похибок синтезаторів необхідно і достатньо визначити величини 11 і 21 . Ці величини визначають окремо в дві стадії. На першій стадії змінну напругу на виході синтезатора S2 встановлюють рівною нулю, а за допомогою синтезатора S1 встановлюють таку фазу сформованої ним на виході допоміжної змінної синусоїдальної напруги U11 при якій напруга на виході суматора Σ є рівною за амплітудою і протилежною за фазою до опорної змінної напруги U0. У цьому стані можна легко автоматично визначити розмір похибки 11 наприклад, методом перестановок [Surdu М.N., Lameko A.L., Karpov I.V. (Ukraine), Kinard J., Koffman A. (USA). Theoretical basis of variational quadrature bridge design of alternative current // Measurement Techniques, Moscow.-2006. - № 10. - P. 58-64]. На другій стадії змінну напругу на виході синтезатора S1 встановлюють рівною нулю, а за допомогою синтезатора S2 і встановлюють таку фазу формованої ним на виході допоміжної змінної синусоїдальної напруги U21 при якій напруга на виході суматора Σ є рівною за амплітудою і протилежною за фазою до опорної змінної напруги U0. У цьому стані можна легко визначити розмір похибки 21 . Визначення кожної з величин 11 і 21 проводиться в три етапи. На першому етапі калібрувальний ланцюг Z1-Z2 підключається між виходами суматора Σ і синтезатора S0, a векторний вольтметр VV вимірює початкову змінну напругу сигналу 40 1 2 нерівноваги Un1 Un1 . На другому етапі під керуванням мікроконтролера МС виконують добре відому варіацію вихідної змінної напруги одного з синтезаторів (наприклад, змінюючи фазу вихідної напруги синтезатора S на величину ) і вимірюють відповідне значення напруги сигналу нерівноваги U11 n . 0 2 Un1 На третьому етапі за допомогою комутатора С1 змінюють полярність підключення калібрувального ланцюга на протилежну і векторний вольтметр вимірює відповідне значення 45 1 2 напруги сигналу нерівноваги Un2 Un2 . Приведені процедури описуються наступною системою рівнянь: 5 UA 102277 C2 U0 1 11 Z 1 U0 Z 2 U11 ; n U0 1 11 Z1 U0 Z 2 U11 n (4) ; U0 1 11 Z 2 U0 Z 1 U12 n де U11 U0 - мультиплікативна похибка напруги, формованої синтезатором S11 яка діє на виході суматора Σ, відносно опорної напруги на виході синтезатора S0. - варіаційний приріст сигналу на виході синтезатора S0. 11 5 Якщо відбувається варіаційний приріст фази сигналу на величину , то tg ). Розв'язок системи рівнянь (4) має вигляд: 2 10 1 1 1 11 1 A11 1 A11 A11 A12 A12 A11 2 2 2 (5) де A11 U12 n U11 n A12 U11 U11 U11 U11 n n . n n ; Для визначення мультиплікативної похибки S21 формування напруги U21 синтезатора S2 задають і утримують нульовий код на вході першого синтезатора, після чого повторюють всю процедуру калібрування. Величину 21 визначають, використовуючи вираз (5), і підставляючи в 15 2 2 U2 нього нові значення виміряних сигналів Un1, n1 , Un2 : 2 1 1 1 21 1 A 21 1 A 21 A 21 A 22 A 22 A 21 2 2 2 . (6) A 21 2 Un1 2 2 Un1 Un1 A 22 U12 n 2 2 Un1 Un1 . U1 Тепер значення відношення сигналів U0 на виході суматора Σ і синтезатора S0 в процесі вимірювання імпедансу визначається рівнянням де: 20 25 30 21 ; U1 U11 U21 1 1 11 cos 1 21 cos 1 11 21 2 cos U0 U0 2 . (7) U1 Рівняння (7) показує, що відношення напруги U3 відрізняється від номінального значення 2 cos на комплексний мультиплікативний множник 1 A 1 11 21 A e j 2 , (8) складові якого визначаються в процесі калібрування рівняннями (3) і (4). Калібрування формувача напруг із заданим відношенням проводиться з використанням елементів, які містять міст: векторного вольтметра VV і мікропроцесорного контролера МС. Це калібрування не вимагає використання скільки-небудь точних еталонних мір. Додатковий аналіз показує, що тут до засобів Z1 і Z2 пред'являються лише дві вимоги: - похибка їх відношення не повинна перевищувати похибки синтезаторів, які калібруються; - нестабільність параметрів мір калібрувального ланцюга на інтервалі калібрування повинна бути нижча від бажаної похибки вимірювання моста. Описана процедура калібрування вимагає проведення шести вимірювань комплексної напруги сигналу нерівноваги. Враховуючи, що в процесі калібрування необхідно забезпечити 6 UA 102277 C2 5 відносну чутливість вимірювань, принаймні, не гіршу, ніж в основному вимірюванні, це означає значне збільшення часу вимірювання. На Фіг. 3 показана структура моста, яка дозволяє використовувати дещо інший підхід до процедури калібрування. Для його пояснення зручно подати рівняння рівноваги моста (2) в наступній формі: U1 U11н U11 U21 U21 U11н U21н U0 U11 U21 Z x U0 Z0 U0 U0 U0 , (9) яка дозволяє побудувати інший алгоритм калібрування. Для його здійснення допоміжні змінні напруги U11 і U12 встановлюють протифазними встановлюючи в синтезаторах S11 і S21 такі фази, при яких досягається рівність U11н U21н . Тоді на виході суматора діятиме сума змінної 10 15 напруги U11 U21 . Відношення цього сигналу до опорного сигналу U0, як видно з (9), є шуканою сумою похибок 11 I 21 . Для визначення шуканої величини в міст введені дільник напруги AD з коефіцієнтом передачі підключений до виходу синтезатора S0, і комутатор С1, за допомогою якого векторний вольтметр VV почергово підключають до виходу суматора Σ і до виходу дільника напруги AD. Вся процедура корекції містить два послідовні вимірювання: - вимірювання змінної напруги на виході суматора Σ; - вимірювання вихідного сигналу дільника AD. Цю процедуру описують рівняннями: 20 U11 U21 U0 Un2 (10) Розв'язок системи (10) має вигляд: U 11 21 n1 Un2 (11) 25 30 35 40 45 50 Використовуючи рівняння (8) і (11) можна врахувати похибки вузлів моста і повністю скорегувати результат вимірювання. З викладеного видно, що для виконання калібрування необхідно виконати всього два вимірювання. Це істотно скорочує час, який витрачається на калібрування. У даному варіанті калібрування необхідно забезпечити виконання наступних умов: - значення коефіцієнта передачі дільника AD повинно бути дещо більшим від максимально очікуваної величини вимірюваної похибки U11 U21 / U0 . - довготривала нестабільність коефіцієнта передачі дільника AD не повинна перевищувати відношення допустимої похибки вимірювання до реальної похибки вузлів, що калібруються. Розглянемо особливості зрівноважування моста, побудованого на базі запропонованого способу формування напруг із заданим відношенням. Рівняння рівноваги (2) визначає зв'язок між регульованим відношенням напруг і відношенням вимірюваних імпедансів, тобто точку рівноваги. Для того, щоб привести міст в точку рівноваги можна розробити багато способів зрівноважування. Для демонстрації принципової можливості приведення моста до стану рівноваги розглянемо таку просту можливість. Нехай для зрівноважування моста за модулем змінюватимемо фази У допоміжних змінних напруг U11 і U21 протифазно (це відповідає симетричній зміні кутів ψ і -ψ між складовими U11 і U21 вектора регульованої змінної напруги U1 і самим вектором U1 на Фіг. 1), а для зрівноважування моста за фазою регулюватимемо початкову фазу φ регульованої змінної напруги U1 (на Фіг. 1 кут φ між векторами U1 і U0) за допомогою синфазних (однакових за модулем і знаком) змін початкових фаз допоміжної змінної напруги U11 і U21 (відповідає на Фіг. 1 одночасному повороту обох векторів U11 і U21 на один і той же кут без зміни кута 2ψміж ними). При такому способі регулювання відношення модулів вимірюваного і еталонного імпедансу визначається різницею фаз допоміжних змінних напруг U11 і U21 2ψ (кутом між векторами U11 і U21 на Фіг. 1), а різниця фазових кутів вимірюваного і еталонного імпедансу визначається різницею фаз φ між регульованою змінною напругою U1 і опорною змінною напругою U0 (кутом між векторами U1 і U0 на Фіг. 1). 7 UA 102277 C2 Таким чином, досягається роздільне зрівноважування вимірюваних величин за модулем і за фазою. Рівняння рівноваги в цьому випадку, з урахуванням результатів калібрування, має вигляд: 5 Z1 jи1 и2 2 cos ш Z1 e A 2 cos ш e j A e jц Z2 Z2 e j . (12) звідки: Z1 Z2 10 15 20 A 2 cos ; і 1 2 . (13) де: 1 і 2 - фазові кути порівнюваного імпедансу. Рівняння (13) дозволяють визначити результат вимірювання і демонструють можливість роздільного відліку результатів вимірювання за модулем і фазою. Роздільний відлік дозволяє отримати простий однозначний відлік між параметрами об'єкту вимірювання і параметрами регульованої за фазою змінної напруги. Це дозволяє застосувати для зрівноважування моста будь-який з багатьох нині існуючих способів. Рівняння (13) демонструє також, що міст на вибраній межі вимірювання може бути зрівноважений за будь-якого характеру об'єкту вимірювання, тобто таким мостом можна вимірювати параметри об'єкту з будь-яким фазовим кутом (індуктивність, ємкість, опір) за будьякого характеру еталонної міри (індуктивного, ємкісного, резистивного). Таким чином, запропонований спосіб формування напруг із заданим відношенням дозволяє побудувати простим шляхом універсальний міст використовуючи будь-яку, найбільш зручну в заданому діапазоні вимірювання, еталонну міру, і, таким чином, істотно розширити функціональні можливості вимірювальних мостів змінного струму. Нехай початкові значення похибок 11 і 21 синтезаторів складають величину, близько 10- . Синтезатори з такою похибкою можуть бути без ускладнень реалізовані за допомогою сучасної елементної бази. Застосовуючи термостатування, сучасні ЦАП з малим температурним коефіцієнтом, ітераційні структури тощо, можна добитися короткочасної, на час вимірювання, 4 25 стабілізації параметрів синтезаторів, за якої нестабільність n ( 11 , 21 ) похибок 11 і 21 не 4 перевищить величини 10- . Тоді, як неважко показати, загальна похибка обумовлена нестабільністю його параметрів і похибкою калібрування складе: d 35 дільника, 11 21 2 2 2 n11 n21 2 (14) 4 Припустимо, що 30 d d 2 10 менше 10- . Підставляючи відповідні числові значення в (14) отримаємо: 8 . Наведений аналіз показує, що теоретично запропонований спосіб ділення дозволяє отримати дуже високу точність ділення. При цьому всі використані в дільнику елементи мають малі габарити і вагу, можуть бути мікромініатюризовані і можуть бути використані в діапазоні від звукових до інфранизьких частот. Попередні експериментальні дослідження підтверджують можливість здійснення способу і вирішення поставленої задачі винаходу. Похибки результатів вимірювань не перевищували 5 8 108 . 40 ФОРМУЛА ВИНАХОДУ 1. Спосіб формування змінних напруг із заданим відношенням, відповідно до якого формують опорну змінну напругу U 0 і регульовану змінну напругу U1 , яка знаходиться в заданому 45 50 відношенні з опорною змінною напругою U 0 , який відрізняється тим, що регульовану змінну напругу U1 формують шляхом додавання двох допоміжних змінних напруг U11 і U12 , фазу кожної з яких змінюють за заданим законом. 2. Спосіб за п. 1, який відрізняється тим, що амплітуди допоміжних напруг U11 і U12 вибирають рівними одна одній. 3. Спосіб за п. 2, який відрізняється тим, що фази допоміжних напруг U11 і U12 змінюють на однакові за абсолютним значенням і протилежні за знаком величини і . 8 UA 102277 C2 4. Спосіб за п. 3, який відрізняється тим, що фазу однієї з допоміжних напруг U11 або U12 додатково змінюють на величину . 5. Спосіб за п. 2, який відрізняється тим, що зміни амплітуди напруги U1 проводять у діапазоні, 5 10 15 20 обмеженому нерівністю 0 U1 kU 0 , де k 2 . 6. Спосіб за п. 3 або п. 4, який відрізняється тим, що фази допоміжних напруг U11 і U12 додатково змінюють на однакову за модулем і однакову за знаком величину . 7. Спосіб за п. 3 або п. 4, який відрізняється тим, що фазу опорної напруги додатково змінюють на величину . 8. Спосіб за пп. 2-7, який відрізняється тим, що амплітуди допоміжних напруг U11 і U12 вибирають рівними амплітуді опорної напруги U 0 . 9. Спосіб за п. 8, який відрізняється тим, що почергово калібрують відношення кожної з допоміжних напруг до опорної, для чого допоміжну калібровану напругу встановлюють у протифазі до опорної, а іншу допоміжну напругу вимикають, після чого похибку відношення допоміжної каліброваної напруги до опорної визначають методом перестановок, а знайдені значення відхилення відношень каліброваної напруги від номінальних значень використовують при розрахунку результату вимірювання параметрів імпедансу. 10. Спосіб за п. 8, який відрізняється тим, що для калібрування відношення регульованої напруги U1 і опорної напруги U 0 допоміжні напруги U11 і U12 встановлюють у протифазі, після чого визначають відношення регульованої напруги U1 до опорної напруги U 0 , а знайдені значення відхилення відношень каліброваної напруги від номінальних значень використовують при розрахунку результату вимірювання параметрів імпедансу. 9 UA 102277 C2 10 UA 102277 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for shaping ac voltages having preset ratio
Автори англійськоюSurdu Mykhailo Mykolaiovych, Surdu Dmytro Mykhailovych
Назва патенту російськоюСпособ формирования переменных напряжений с заданым соотношением
Автори російськоюСурду Михаил Николаевич, Сурду Дмитрий Михайлович
МПК / Мітки
МПК: H03L 5/00
Мітки: напруг, відношенням, заданим, формування, спосіб, змінних
Код посилання
<a href="https://ua.patents.su/13-102277-sposib-formuvannya-zminnikh-naprug-iz-zadanim-vidnoshennyam.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування змінних напруг із заданим відношенням</a>
Спосіб формування імпульсів високоамплітудних струмів (напруг)
Номер патенту: 20159
Опубліковано: 25.12.1997
Автори: Муха Борис Іванович, Муха Юрій Борисович, Колупаєв Борис Сергійович
МПК: H03K 3/00
Мітки: струмів, імпульсів, високоамплітудних, напруг, формування, спосіб
Формула / Реферат:
Спосіб формування імпульсів високо-амплітудних струмів (напруг) в електричному колі регенерації модулем з пари інертних електродів, частково занурених в електроліт і попередньо, з допомогою подвійного перекидного перемикача, включених в електричне коло генерації при малих струмах і напругах між електродами менших за нижню межу порогової.
Спосіб свердлення отворів з використанням двох змінних твердосплавних пластин
Номер патенту: 28061
Опубліковано: 26.11.2007
Автори: Воєводін Альберт Борисович, Сидоров Володимир Анатолійович, Воєводіна Тетяна Альбертівна, Федотенко Святослав Юрійович
МПК: B23B 51/00
Мітки: пластин, змінних, спосіб, двох, використанням, свердлення, отворів, твердосплавних
Формула / Реферат:
Спосіб свердлення отворів з використанням двох змінних твердосплавних пластин, який складається з подачі свердла в зону обробки, самого свердлення з заданою частотою обертання свердла і виводу його із зони обробки, який відрізняється тим, що частоту обертання встановлюють з виразу: (1);де n - частота обертання, об/хв.;В - кут нахилу різальної кромки...
Спосіб повірки масштабних перетворювачів напруг
Номер патенту: 85749
Опубліковано: 25.02.2009
Автор: Бутенко Олег Григорович
МПК: G01R 35/00
Мітки: масштабних, перетворювачів, спосіб, напруг, повірки
Формула / Реферат:
1. Спосіб повірки масштабних перетворювачів напруг, при якому вирівнюють потенціали виходів допоміжного та того, що повіряють, масштабних перетворювачів напруг шляхом змінювання напруги джерела живлення низької напруги одного з масштабних перетворювачів напруг при рівності потенціалів на їх високовольтних входах, проводять виміри напруг, за результатами оцінюють метрологічні характеристики масштабного перетворювача напруг, що повіряють, який...
Спосіб зниження зварювальних напруг і деформацій
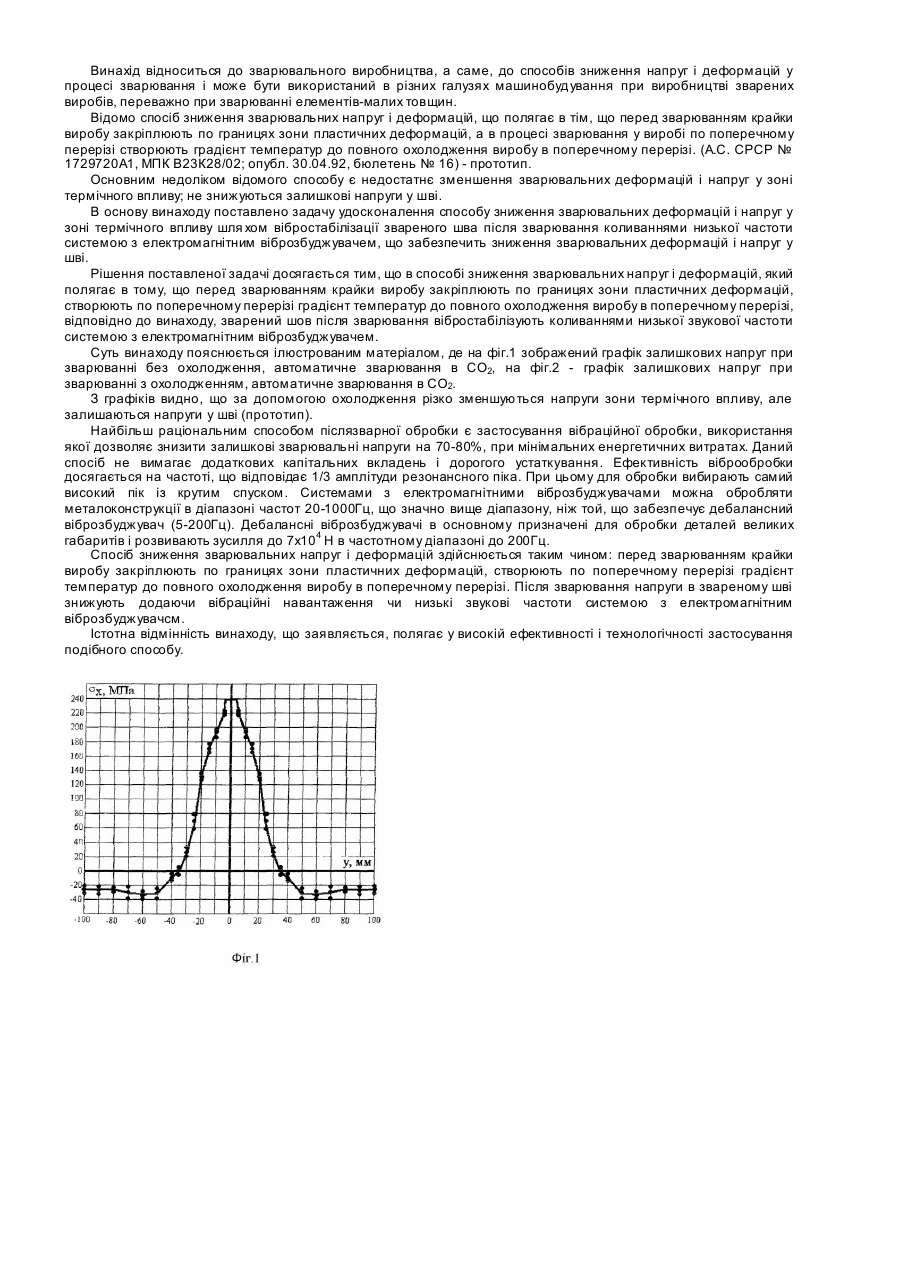
Номер патенту: 67212
Опубліковано: 15.06.2004
Автори: Паненко Роман Миколайович, Жидков Андрій Борисович, Гедрович Анатолій Іванович
МПК: B23K 9/035, B23K 9/038
Мітки: зниження, зварювальних, напруг, деформацій, спосіб
Формула / Реферат:
Спосіб зниження зварювальних напруг і деформацій, який полягає у тому, що перед зварюванням крайки виробу закріплюють по границях зони пластичних деформацій, створюють по поперечному перерізу градієнт температур до повного охолодження виробу у поперечному перерізі, який відрізняється тим, що зварений шов після зварювання виробу вібростабілізують коливаннями низької звукової частоти системою з електромагнітним віброзбуджувачем.
Спосіб зменшення зварювальних деформацій та напруг
Номер патенту: 53060
Опубліковано: 15.01.2003
Автори: Друзь Олег Миколайович, Гальцов Ігор Олександрович, Гедрович Анатолій Іванович
МПК: B23K 33/00
Мітки: деформацій, зварювальних, спосіб, напруг, зменшення
Формула / Реферат:
Спосіб зменшення зварювальних деформацій та напруг, при якому у виробі, за зварювальною ванною, створюють градієнт температур по поперечному перерізу зварного з'єднання в напрямку, нормальному від осі шва, шляхом охолодження шва в процесі зварювання до повного охолодження виробу в поперечному перерізі, а крайки виробу перед зварюванням закріплюють по границях зони пластичних деформацій, який відрізняється тим, що охолодження ділянки зони...
Попередній патент: Чавун
Наступний патент: Плаский тяговий орган шахтної канатної дороги
Випадковий патент: Спосіб обробки насіння цукрових буряків захисно-стимулюючими речовинами