Спосіб керування орієнтацією вітрового генератора та вітровий генератор
Формула / Реферат
1. Спосіб керування орієнтацією вітрового генератора, який містить встановлену на нерухомій вежі (1) з можливістю обертання навколо вертикальної осі гондолу (2) з розміщеним у ній горизонтальним обертовим валом (3) ротора, ротор турбіни, утворений принаймні однією встановленою на валу лопаттю (4), яка перетворює кінетичну енергії вітру на енергію обертання вала (3) ротора, з яким механічно зв'язаний електрогенератор, згідно з яким за допомогою контролера (7) орієнтації обробляють сигнал, залежний від відхилення осі валу (3) ротора від напрямку на вітер, і формують керуючий сигнал зворотного зв'язку, який подають на актуатор (8) орієнтації до досягнення усунення вказаного відхилення, причому керуючий сигнал формують за часовою різницею між моментами часу перебування лопатей (4) у нижньому вертикальному положенні, які визначають за опорним сигналом давача (6), зв'язаного з валом ротора, і моментами часу перебування лопатей (4) на лінії між напрямком вітру і вежею (1), які визначають за сигналом "тіні вежі", зумовленим аеродинамічною взаємодією між лопатями (4) і вежею (1), який відрізняється тим, що сигнал "тіні вежі" формують шляхом реєстрації низькочастотних періодичних вібрацій верхівки вежі (1), зумовлених аеродинамічною взаємодією між лопатями (4) і вежею (1).
2. Спосіб за п. 1, який відрізняється тим, що моменти часу перебування лопатей (4) у нижньому вертикальному положенні формують із опорного сигналу індукційного давача (6) положення ротора, закріпленого нерухомо близько болтів кріплення маточини валу ротора.
3. Спосіб за п. 1, який відрізняється тим, що сигнал "тіні вежі" отримують із сигналу давача (5) вібрації шляхом виконання послідовності дій: формування первинного сигналу коливання вежі (1) вітрового генератора, смугова фільтрація, виокремлення основної гармоніки періодичного сигналу "тіні вежі".
4. Спосіб за п. 1, який відрізняється тим, що часову різницю визначають за допомогою фазометра (10) як різницю фаз між опорним сигналом давача (6) положення лопатей (4) ротора і основною гармонікою періодичного сигналу "тіні вежі".
5. Спосіб за п. 4, який відрізняється тим, що сигнал часової різниці обробляють фільтром (13) нижніх частот.
6. Спосіб за п. 5, який відрізняється тим, що фільтрований сигнал часової різниці подають на вхід модуля (14) керування актуатором (8) орієнтації, який виконаний у вигляді Р-регулятора, РІ-регулятора, PID-регулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, і в якому формують керуючий сигнал для актуатора орієнтації.
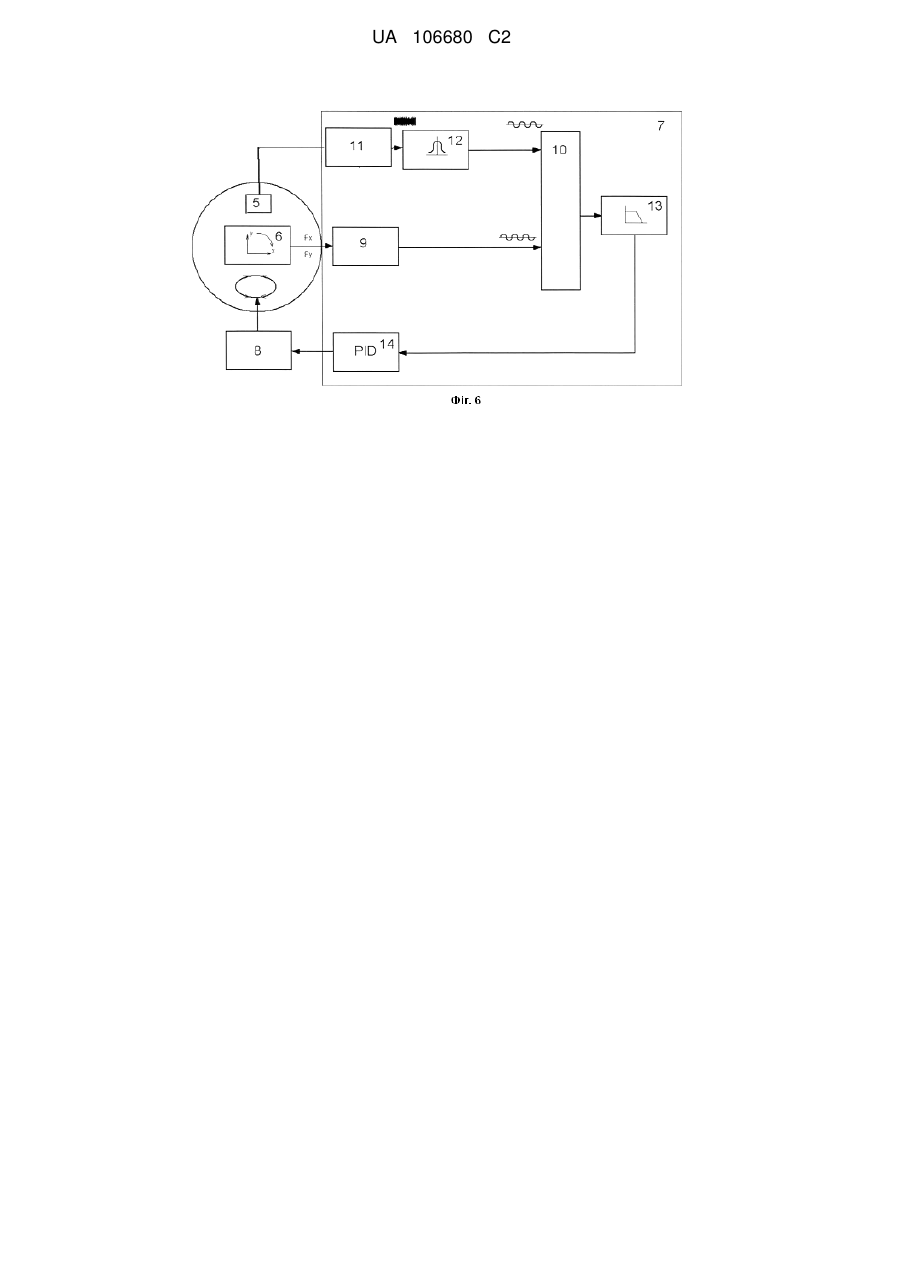
7. Вітровий генератор, що містить встановлену на нерухомій вежі (1) з можливістю обертання навколо вертикальної осі гондолу (2) з розміщеним у ній з можливістю обертання навколо горизонтальної осі валом (3) ротора, ротор вітрової турбіни, утворений принаймні однією встановленою на маточині валу лопаттю (4), виконаною з можливістю перетворення кінетичної енергії вітру на енергію обертання валу ротора, механічно зв'язаний з валом (3) ротора електрогенератор, виконаний зі здатністю формування керуючого сигналу за фазовою різницею між опорним сигналом і сигналом "тіні вежі" контролер (7) орієнтації, що містить з'єднаний із входом первинного сигналу "тіні вежі" формувач (11), з'єднаний із виходом формувача (11) фільтр (12) основної гармоніки сигналу "тіні вежі", з'єднаний із входом первинного опорного сигналу модуль (9) обробки опорного сигналу, фазометр (10), з'єднаний з виходами модуля (9) обробки опорного сигналу і фільтра (12) основної гармоніки сигналу "тіні вежі", фільтр (13) нижніх частот сигналу часової різниці та з'єднаний з його виходом модуль (14) керування актуатором (8) орієнтації, а також зв'язаний з валом (3) ротора давач (6) опорного сигналу нижнього вертикального положення лопатей (4) ротора, з'єднаний із входом первинного опорного сигналу контролера (7), який відрізняється тим, що містить встановлений на верхівці вежі вітрогенератора давач (5) вібрацій, з'єднаний із входом первинного сигналу "тіні вежі" контролера (7), а також тим, що формувач (11) сигналу "тіні вежі" виконаний у вигляді фільтра нижніх частот з програмно керованою частотою зрізу та підсилювача з програмно керованим коефіцієнтом підсилення.
8. Вітровий генератор за п. 7, який відрізняється тим, що давач (5) вібрацій верхівки вежі виконаний у вигляді давача віброприскорення, давача віброшвидкості або давача вібропереміщення.
9. Вітровий генератор за п. 7, який відрізняється тим, що модуль (14) керування актуатором орієнтації виконаний у вигляді Р-регулятора, РІ-регулятора, PID-регулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці.
Текст
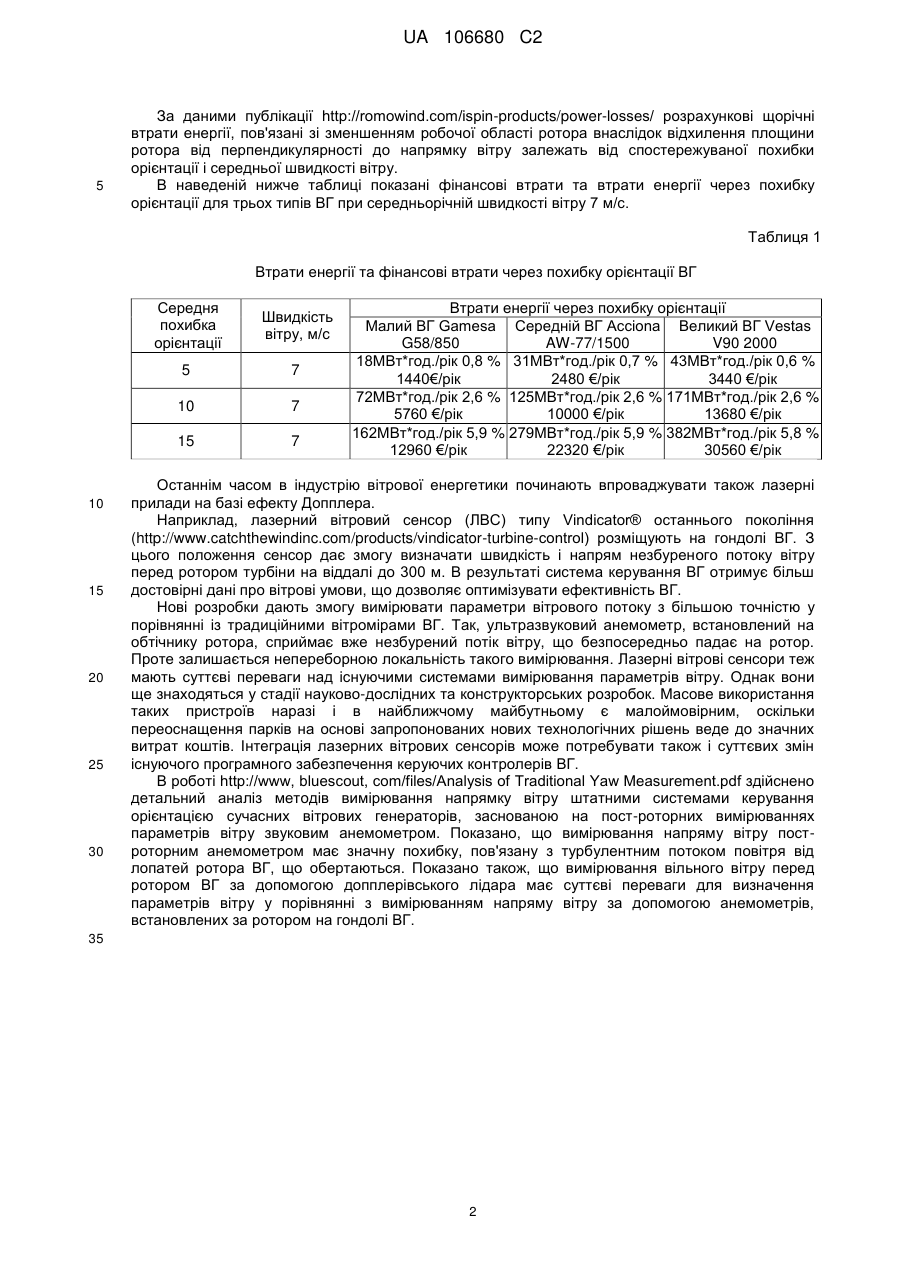
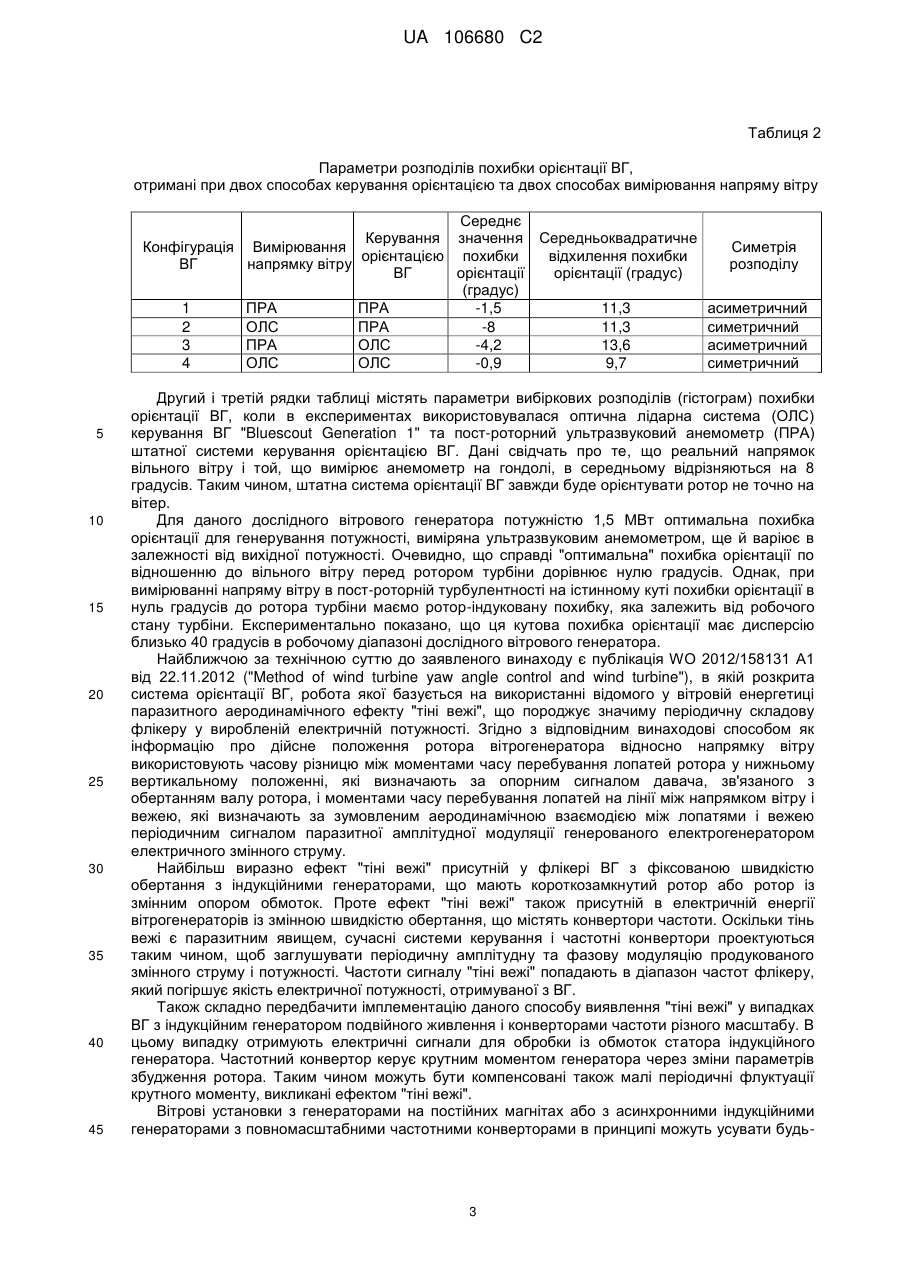
Реферат: Винахід належить до вітрової енергетики і стосується способу керування орієнтацією вітрового генератора з горизонтальним розміщенням вала ротора, а також вітрового генератора для здійснення способу. Згідно із способом як інформацію про дійсне положення ротора вітрогенератора відносно напрямку вітру використовують часову різницю між моментами часу перебування лопатей ротора у нижньому вертикальному положенні, які визначають за опорним сигналом давача, зв'язаного з валом ротора, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею, які визначають за періодичним сигналом вібрації верхівки вежі, зумовленим аеродинамічною взаємодією між лопатями і вежею. Відповідний винаходові вітровий генератор містить контролер орієнтації, до складу якого входять функціональні вузли, здатні формувати керуючий сигнал для обертання гондоли вітрового генератора за вказаною часовою різницею. UA 106680 C2 (12) UA 106680 C2 UA 106680 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до вітрової енергетики і стосується способу керування орієнтацією вітрового генератора з горизонтальним розміщенням вала ротора, а також вітрового генератора для здійснення способу. Серед найперспективніших напрямків використання відновлюваних ресурсів енергії вітрова енергетика розвивається найбільш динамічно, і вже стала конкурентоздатним гравцем на ринку виробництва електроенергії. Переважна більшість сучасних вітрових генераторів (ВГ) мають трилопатевий ротор з горизонтально розміщеним валом. Такі турбіни потребують певного механізму орієнтації ротора на вітер і відповідного контролера орієнтації. Похибка орієнтації визначається як кут між фактичним напрямом осі ротора і напрямом вітру. Щоб добути максимум ефективності перетворення кінетичної енергії вітру, кутова похибка орієнтації ВГ має бути рівна нулю. В процесі орієнтації гондолу ВГ обертають навколо вертикальної осі з метою мінімізувати похибку орієнтації. Зазвичай вісь вежі ВГ збігається з віссю обертання гондоли. Фізично процес орієнтації здійснюють електричні або гідравлічні приводи орієнтації ВГ. Згідно з рівнем техніки система керування орієнтацією типової сучасного ВГ ґрунтується на прямому вимірюванні напряму вітру одним або декількома електромеханічними (аналоговими) або оптичними (дискретними) давачами напряму - флюгерами анемометрів, розміщеними на гондолі ВГ у її кормовій частині. Недосконалість звичайних електромеханічних і оптичних давачів - флюгерів анемометрів, їх розташування на гондолі за ротором турбіни, необхідність калібрування при введенні в дію ВГ призводить до того, що пересічний вітровий генератор практично майже зажди неточно зорієнтований на вітер. Точність вимірювання напряму вітру за допомогою флюгерів анемометрів, розміщених на гондолі ВГ за збуреним ротором вихровим турбулентним повітряним потоком, у більшості випадків є незадовільною. Похибка вимірювання є функцією швидкості вітру, інтенсивності турбулентності, напрямку вітру та інших параметрів вітрового потоку, що проходить через ротор ВГ, та аеродинамічних характеристик ротора. Для електромеханічних флюгерів анемометрів ВГ, встановлених на гондолі за ротором, звичними є похибки орієнтації через невластиві оцінки напряму вітру в межах ±15°. При цьому стандартна девіація похибки оцінюється в 5°. В патентній заявці US 2009/0039651 А1 "Method for wind turbine yaw control", опубл. 04.04.2010, відзначається, що для електромеханічного флюгера анемометра, розміщеного в кормовій частині гондоли, досягти невизначеності у значенні напряму вітру ±5° є дуже складно, при врахуванні всіх джерел невизначеності вимірювання. Потреби сучасної індустрії вітрової енергетики стимулюють наукові розробки у напрямку вимірювання параметрів вітру на основі ультразвукових технологій (див. T.F. Pedersen, N.S. S0rensen, Luca Vita, Peder Enevoldsen, Optimization of Wind Turbine Operation by Use of Spinner Anemometer ris-r-1654). Експериментальні дослідження втрат потужності ВГ (Pedersen TF, "On Wind Turbine Power Performance Measurements at Inclined Airflow", WIND ENERGY 2004; 7:163-176) показують, що потужність на виході ВГ зменшується за функцією "квадрат косинуса" кута похибки орієнтації. На практиці це означає зменшення потужності на 1 %, 3 %, 7 % та 22 % для систематичної середньої похибки орієнтації 5°, 10°, 15° та 20° відповідно. Для ВГ потужністю 3,6 МВт похибка орієнтації, виміряна ультразвуковим вітроміром на обтічнику ротора, становить близько 10°. Це означає, що при оптимізації процесу орієнтації можна досягнути суттєвого приросту потужності і відповідно виробленої енергії. Якщо припустити існування похибки орієнтації ВГ із середнім значенням 8° та стандартним відхиленням 2°, то втрати потужності у порівнянні з правильною орієнтацією ротора ВГ становитимуть 3,8 %. Після корекції похибки орієнтації до середнього значення 0° із стандартною девіацією 2° втрати становитимуть 1,9 %. Таким чином, оптимізація похибки приведе до зростання вихідної потужності ВГ на 1,9 %. При малих та помірних швидкостях вітру похибка орієнтації має більше розсіяння, а вихідна потужність є чутливою до похибки орієнтації. Різкі зміни напряму вітру, характерні для цих умов, спричиняють варіації вихідної потужності ВГ і появу додаткових динамічних навантажень у механічному приводі. Звісно вони є небажаним явищем, бо можуть спричинити суттєве скорочення втомної довговічності конструкції і компонентів механічного приводу ВГ (Заявка на патент США 20080111379, опубл. 15.05.2008 "Wind Turbine and Method for the Automatic Correction of Wind" Vane Settings Altemark, J.) Порівняння орієнтації, отриманої за допомогою флюгера, з показаннями ультразвукового вітроміра на обтічнику ротора виявляє похибку орієнтації за допомогою флюгера близько 20 %. 1 UA 106680 C2 5 За даними публікації http://romowind.com/ispin-products/power-losses/ розрахункові щорічні втрати енергії, пов'язані зі зменшенням робочої області ротора внаслідок відхилення площини ротора від перпендикулярності до напрямку вітру залежать від спостережуваної похибки орієнтації і середньої швидкості вітру. В наведеній нижче таблиці показані фінансові втрати та втрати енергії через похибку орієнтації для трьох типів ВГ при середньорічній швидкості вітру 7 м/с. Таблиця 1 Втрати енергії та фінансові втрати через похибку орієнтації ВГ Середня похибка орієнтації 5 20 25 30 7 15 15 7 10 10 Швидкість вітру, м/с 7 Втрати енергії через похибку орієнтації Малий ВГ Gamesa Середній ВГ Acciona Великий ВГ Vestas G58/850 AW-77/1500 V90 2000 18МВт*год./рік 0,8 % 31МВт*год./рік 0,7 % 43МВт*год./рік 0,6 % 1440€/рік 2480 €/рік 3440 €/рік 72МВт*год./рік 2,6 % 125МВт*год./рік 2,6 % 171МВт*год./рік 2,6 % 5760 €/рік 10000 €/рік 13680 €/рік 162МВт*год./рік 5,9 % 279МВт*год./рік 5,9 % 382МВт*год./рік 5,8 % 12960 €/рік 22320 €/рік 30560 €/рік Останнім часом в індустрію вітрової енергетики починають впроваджувати також лазерні прилади на базі ефекту Допплера. Наприклад, лазерний вітровий сенсор (ЛВС) типу Vindicator® останнього покоління (http://www.catchthewindinc.com/products/vindicator-turbine-control) розміщують на гондолі ВГ. З цього положення сенсор дає змогу визначати швидкість і напрям незбуреного потоку вітру перед ротором турбіни на віддалі до 300 м. В результаті система керування ВГ отримує більш достовірні дані про вітрові умови, що дозволяє оптимізувати ефективність ВГ. Нові розробки дають змогу вимірювати параметри вітрового потоку з більшою точністю у порівнянні із традиційними вітромірами ВГ. Так, ультразвуковий анемометр, встановлений на обтічнику ротора, сприймає вже незбурений потік вітру, що безпосередньо падає на ротор. Проте залишається непереборною локальність такого вимірювання. Лазерні вітрові сенсори теж мають суттєві переваги над існуючими системами вимірювання параметрів вітру. Однак вони ще знаходяться у стадії науково-дослідних та конструкторських розробок. Масове використання таких пристроїв наразі і в найближчому майбутньому є малоймовірним, оскільки переоснащення парків на основі запропонованих нових технологічних рішень веде до значних витрат коштів. Інтеграція лазерних вітрових сенсорів може потребувати також і суттєвих змін існуючого програмного забезпечення керуючих контролерів ВГ. В роботі http://www, bluescout, com/files/Analysis of Traditional Yaw Measurement.pdf здійснено детальний аналіз методів вимірювання напрямку вітру штатними системами керування орієнтацією сучасних вітрових генераторів, заснованою на пост-роторних вимірюваннях параметрів вітру звуковим анемометром. Показано, що вимірювання напряму вітру построторним анемометром має значну похибку, пов'язану з турбулентним потоком повітря від лопатей ротора ВГ, що обертаються. Показано також, що вимірювання вільного вітру перед ротором ВГ за допомогою допплерівського лідара має суттєві переваги для визначення параметрів вітру у порівнянні з вимірюванням напряму вітру за допомогою анемометрів, встановлених за ротором на гондолі ВГ. 35 2 UA 106680 C2 Таблиця 2 Параметри розподілів похибки орієнтації ВГ, отримані при двох способах керування орієнтацією та двох способах вимірювання напряму вітру Середнє Керування значення Середньоквадратичне Конфігурація Вимірювання Симетрія орієнтацією похибки відхилення похибки ВГ напрямку вітру розподілу ВГ орієнтації орієнтації (градус) (градус) 1 ПРА ПРА -1,5 11,3 асиметричний 2 ОЛС ПРА -8 11,3 симетричний 3 ПРА ОЛС -4,2 13,6 асиметричний 4 ОЛС ОЛС -0,9 9,7 симетричний 5 10 15 20 25 30 35 40 45 Другий і третій рядки таблиці містять параметри вибіркових розподілів (гістограм) похибки орієнтації ВГ, коли в експериментах використовувалася оптична лідарна система (ОЛС) керування ВГ "Bluescout Generation 1" та пост-роторний ультразвуковий анемометр (ПРА) штатної системи керування орієнтацією ВГ. Дані свідчать про те, що реальний напрямок вільного вітру і той, що вимірює анемометр на гондолі, в середньому відрізняються на 8 градусів. Таким чином, штатна система орієнтації ВГ завжди буде орієнтувати ротор не точно на вітер. Для даного дослідного вітрового генератора потужністю 1,5 МВт оптимальна похибка орієнтації для генерування потужності, виміряна ультразвуковим анемометром, ще й варіює в залежності від вихідної потужності. Очевидно, що справді "оптимальна" похибка орієнтації по відношенню до вільного вітру перед ротором турбіни дорівнює нулю градусів. Однак, при вимірюванні напряму вітру в пост-роторній турбулентності на істинному куті похибки орієнтації в нуль градусів до ротора турбіни маємо ротор-індуковану похибку, яка залежить від робочого стану турбіни. Експериментально показано, що ця кутова похибка орієнтації має дисперсію близько 40 градусів в робочому діапазоні дослідного вітрового генератора. Найближчою за технічною суттю до заявленого винаходу є публікація WO 2012/158131 А1 від 22.11.2012 ("Method of wind turbine yaw angle control and wind turbine"), в якій розкрита система орієнтації ВГ, робота якої базується на використанні відомого у вітровій енергетиці паразитного аеродинамічного ефекту "тіні вежі", що породжує значиму періодичну складову флікеру у виробленій електричній потужності. Згідно з відповідним винаходові способом як інформацію про дійсне положення ротора вітрогенератора відносно напрямку вітру використовують часову різницю між моментами часу перебування лопатей ротора у нижньому вертикальному положенні, які визначають за опорним сигналом давача, зв'язаного з обертанням валу ротора, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею, які визначають за зумовленим аеродинамічною взаємодією між лопатями і вежею періодичним сигналом паразитної амплітудної модуляції генерованого електрогенератором електричного змінного струму. Найбільш виразно ефект "тіні вежі" присутній у флікері ВГ з фіксованою швидкістю обертання з індукційними генераторами, що мають короткозамкнутий ротор або ротор із змінним опором обмоток. Проте ефект "тіні вежі" також присутній в електричній енергії вітрогенераторів із змінною швидкістю обертання, що містять конвертори частоти. Оскільки тінь вежі є паразитним явищем, сучасні системи керування і частотні конвертори проектуються таким чином, щоб заглушувати періодичну амплітудну та фазову модуляцію продукованого змінного струму і потужності. Частоти сигналу "тіні вежі" попадають в діапазон частот флікеру, який погіршує якість електричної потужності, отримуваної з ВГ. Також складно передбачити імплементацію даного способу виявлення "тіні вежі" у випадках ВГ з індукційним генератором подвійного живлення і конверторами частоти різного масштабу. В цьому випадку отримують електричні сигнали для обробки із обмоток статора індукційного генератора. Частотний конвертор керує крутним моментом генератора через зміни параметрів збудження ротора. Таким чином можуть бути компенсовані також малі періодичні флуктуації крутного моменту, викликані ефектом "тіні вежі". Вітрові установки з генераторами на постійних магнітах або з асинхронними індукційними генераторами з повномасштабними частотними конверторами в принципі можуть усувати будь 3 UA 106680 C2 5 10 15 20 25 30 35 40 45 50 55 які періодичні флуктуації миттєвої амплітуди струму чи потужності, спричинені пульсаціями крутного моменту ротора після перетворення частоти. Таким чином, вибір концепції ВГ є важливим фактором при імплементації способу керування орієнтацією, що ґрунтується на обробленні електричних сигналів на виході генератора. Тому задачею винаходу є створення способу керування орієнтацією вітрового генератора і пристрою для здійснення способу, які забезпечують збільшення енергоефективності ВГ завдяки підвищенню точності орієнтації валу ротора на вітер шляхом використання в роботі системи орієнтації сигналів низькочастотної вібрації верхівки вежі. Стосовно способу задача вирішена у способі керування орієнтацією вітрового генератора, який містить встановлену на нерухомій вежі з можливістю обертання навколо вертикальної осі гондолу з розміщеним у ній горизонтальним обертовим валом ротора, ротор турбіни, утворений принаймні двома встановленими у валу лопатями, які перетворюють кінетичну енергії вітру на енергію обертання валу ротора, з яким механічно зв'язаний електрогенератор, згідно з яким за допомогою контролера орієнтації обробляють сигнал, залежний від відхилення осі валу ротора від напрямку на вітер, і формують керуючий сигнал зворотного зв'язку, який подають на актуатор орієнтації до досягнення усунення вказаного відхилення. Згідно з винаходом на актуатор орієнтації подають керуючий сигнал, який формують за часовою різницею між моментами часу перебування лопатей у нижньому вертикальному положенні, які визначають за опорним сигналом давача, зв'язаного з валом ротора, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею, які визначають за низькочастотним періодичним сигналом вібрації верхівки вежі, зумовленим аеродинамічною взаємодією між лопатями ротора і вежею. Аеродинамічна взаємодія лопатей і вежі безпосередньо породжує періодичний сигнал вібрації верхівки вежі, який реєструється встановленими в гондолі (у машинному відсіку) ВГ у аксіальному і трансверсальному (поперечному) напрямках давачами вібрації. Тому даний спосіб видається простішим і природнішим від того, що розкритий у заявці WO 2012/158131 А1. При цьому використовується принцип отримання корисного сигналу, який не зазнає впливу процесів перетворення механічного крутного моменту ротора компонентами приводу і генератором та згаданих вище методів компенсації. Сигнал вібрації верхівки вежі може бути отриманий за допомогою давачів механічної вібрації. Зазвичай вимірюють один із параметрів вібрації - прискорення, швидкість або переміщення. Відповідно до параметру і специфіки задачі вибирають давач вібрації. Наприклад, для оцінки вібраційного стану обертових машин за вібрацією її нерухомих частин розроблені міжнародні стандарти. Тому вібрацію обертових машин прийнято характеризувати параметром віброшвидкості. Відносну вібрацію повільних масивних валів та підшипників ковзання вимірюють вихро-струмовими давачами наближення, подібними до описаного в заявці давача положення ротора. В цьому випадку параметром є переміщення вала в підшипникових опорах. Найбільш поширеними є давачі вібраційного прискорення, які засновані на п'єзоефекті і служать для контактного вимірювання абсолютної вібрації на необертових компонентах конструкцій. Наявний рівень техніки допускає також використання давачів віброприскорення у формі мікроелектронних сенсорів руху, імплементованих у вигляді мікросхеми. Безконтактне вимірювання віброшвидкості і вібропереміщення вежі ВГ також можна здійснити за допомогою лазерного доплерівського віброметра. В переважній формі виконання сигнал вібрації може бути отриманий від сенсора у формі п'єзоакселерометра, закріпленого у осьовому напрямку валу ВГ на масивному компоненті гондоли ВГ. У переважній формі виконання моменти часу перебування лопатей у нижньому вертикальному положенні формують із давача положення ротора. Відповідно до даного винаходу опорний давач кутового положення лопатей ротора може бути виконаний у декількох різних формах. Традиційна форма виконання давача положення лопатей ротора може мати вигляд відомого із рівня техніки індукційного давача наближення (proximity probe) системи вимірювання швидкості обертання ротора ВГ. За допомогою індукційних давачів (Project Upwind, contract №019945(SES6) M.Hau "Promising Load Estimation Methodologies for Wind Turbine Components", 55 p.) можна достовірно оцінити швидкість обертання ротора та його положення. В основу дії індукційного давача наближення покладений принцип амплітудної модуляції гармонічних коливань генератора. Основною ланкою служать генератор синусоїдальних коливань і чутлива електромагнітна система давача у вигляді котушки індуктивності в осерді. Давач розміщують навпроти головок болтів фланцевого кріплення маточини або спеціального металевого диска з отворами, прикріпленого до валу ротора. 4 UA 106680 C2 Частота імпульсного сигналу дає значення швидкості обертання ротора n (в обертах за хвилину) відповідно до співвідношення: n 5 10 15 20 25 30 35 40 45 50 55 fpulse Nbolts 60[min 1] . Сигнал давача швидкості обертання ротора необхідний першочергово для керування швидкістю обертання ротора ВГ, а також для інших цілей, зокрема контролю технічного стану ВГ методами вібродіагностики. Вважають, що мінімальна частота імпульсів повинна бути не менше 5 Гц. Кількість болтів Nbolts на маточині кріплення для різних ВГ визначається їхніми конструктивними особливостями. Значення швидкості обертання ротора бажано оцінювати принаймні декілька разів за секунду (мінімальна частота оновлення значення швидкості обертання ротора ВГ становить 3 Гц). Таким чином при трилопатевому роторі за один його оберт матимемо три прямокутні імпульси положення ротора. Такий простий давач встановлено на піддослідному ВГ заявника. Інші способи вимірювання швидкості та положення ротора ВГ полягають у використанні інших додаткових датчиків, що дають змогу більш вишукано, дорого і точно вимірювати швидкість обертання ротора та його положення. Детальніше можливі варіанти втілення способів вимірювання швидкості обертання ротора і його положення описані в публікації WO 2012/158131 А1. Згідно з винаходом періодичний сигнал аеродинамічної взаємодії лопатей ротора і вежі - так званий сигнал "тіні вежі" - виділяють шляхом виконання послідовності дій: отримання аналогового сигналу давача вібрацій, його оцифрування, смугова цифрова фільтрація з метою виокремлення основної гармоніки періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі, яка є нестаціонарним вузькосмуговим випадковим процесом (Mikhailishin, V.Yu.; Yavorskii, I.N. Narrowband nonstationary random processes Radiotekhnika і Elektronika, vol.42, no.5, p. 596-605 TRANSLATED IN: Journal of Communications Technology and Electronics, 1997, vol.42, no.5, p. 548-57). В статті розглянуто модель вузькосмугового модульованого сигналу у вигляді нестаціонарного випадкового процесу та проаналізовано властивості перетворення Гільберта такого процесу. Після смугового фільтра отримують якраз такий сигнал, модульований по амплітуді і фазі. Стаття в певному сенсі є теоретичним підґрунтям заявленого способу, хоча і не дає конкретного спонукання до заявленого використання цього сигналу. Вказану часову різницю визначають як різницю фаз між опорним сигналом давача положення ротора і основною гармонікою періодичного сигналу "тіні вежі". Сигнал часової різниці перед подачею на модуль керування актуатором орієнтації обробляють фільтром нижніх частот, який усуває високочастотні складові. Для узгодження із динамічними параметрами оточення вітрового генератора і його конструктивних елементів фільтрований сигнал часової різниці подають на вхід модуля керування актуатором орієнтації, який виконаний у вигляді Р-регулятора, РІ-регулятора, PIDрегулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, і в якому формують керуючий сигнал для актуатора орієнтації. Стосовно пристрою для здійснення відповідного винаходові способу задача вирішена у вітровому генераторі, що містить встановлену на нерухомій вежі з можливістю обертання навколо вертикальної осі гондолу з розміщеним у ній з можливістю обертання навколо горизонтальної осі валом ротора, ротор вітрової турбіни, утворений принаймні одною встановленою на валу лопаттю, виконаною з можливістю перетворення кінетичної енергії вітру на енергію обертання валу ротора, механічно зв'язаний з валом ротора електрогенератор, контролер орієнтації, вихід якого з'єднаний з актуатором орієнтації. Згідно з винаходом вітровий генератор містить зв'язаний з валом ротора давач опорного сигналу нижнього вертикального положення лопатей ротора, а з'єднаний з давачем опорного сигналу контролер орієнтації виконаний зі здатністю формування керуючого сигналу за часовою різницею між моментами часу перебування лопатей у нижньому вертикальному положенні, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею. У переважній формі виконання вітрового генератора контролер орієнтації містить такі функціональні вузли: смуговий фільтр основної гармоніки періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі, з'єднаний з давачем модуль обробки опорного сигналу, фазометр, з'єднаний з виходами модуля обробки опорного сигналу і смугового фільтра основної гармоніки періодичного сигналу "тіні вежі", фільтр нижніх частот сигналу часової різниці та з'єднаний з його виходом модуль керування актуатором орієнтації у вигляді Ррегулятора, РІ-регулятора, PID-регулятора, нейронно-мережевого регулятора, регулятора з 5 UA 106680 C2 5 10 15 20 25 30 35 40 45 50 55 60 нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, вихід якого з'єднаний з актуатором орієнтації. Нижче винахід докладніше пояснюється з посиланнями на ілюстрації, на яких зображено: Фіг. 1 Схематичний вигляд ВГ зверху; Фіг. 2 Оцінка спектру низькочастотного сигналу вібрації; Фіг. 3 Імпульси від давача вертикального положення лопаті ротора: I - опорні імпульси від давача вертикального положення лопаті ротора; II - періодичний сигнал "тіні вежі" при точній орієнтації ВГ на вітер; III - "тінь вежі" випереджає ротор; IV - ротор випереджає "тінь вежі"; Фіг. 4 - ВГ не точно зорієнтований на вітер; Фіг. 5 - Функція модуляції фази вузькосмугової складової сигналу "тіні вежі" як індикатор похибки орієнтації; Фіг. 6 - Блок-схема системи керування орієнтацією ВГ. На фіг. 1 схематично зображено призначений для здійснення відповідного винаходові способу відповідний винаходові вітровий генератор (ВГ), який містить вежу 1, на якій встановлена з можливістю обертання навколо вертикальної осі гондола 2. У гондолі 2 встановлений з можливістю обертання навколо горизонтальної осі вал 3 ротора, утвореного в описуваній формі виконання трьома лопатями 4, призначеними для перетворення енергії вітру на енергію обертання валу ротора. У загальному випадку вісь вала ротора відхиляється від напрямку W вітру на змінний кут α. З валом 3 ротора механічно зв'язаний електрогенератор. Для забезпечення орієнтації ротора вітровий генератор обладнаний нерухомо механічно з'єднаним з підшипниковою опорою валу З ротора давачем 5 вібрації верхівки вежі акселерометром, опорним давачем 6 положення лопатей, контролером 7 орієнтації і приводом обертання гондоли 2 - актуатором 8 орієнтації, функціонально об'єднаними у замкнутий контур автоматичного регулювання. Спосіб орієнтації ротора ВГ ґрунтується на неперервному вимірюванні параметрів низькочастотної вібрації верхівки вежі ВГ в аксіальному (бажано) або поперечному напрямі (так є насправді у дослідному ВГ заявника). Спектр реального сигналу вібрації (Фіг. 2) містить спектральну складову, відповідну швидкості обертання ротора з частотою 1р. Відомо, що ця складова вібрації з'являється в спектрі за наявності механічного дисбалансу ротора або неоднаковості лопатей ротора через встановлений кут атаки (пітч), пошкодження, забруднення чи обледеніння поверхонь. Гармоніка з частотою 2р може виникати як результат нелінійної взаємодії в системі ротора, що обертається, проте в нашому випадку дана гармоніка не спостерігається. У разі трилопатевого ротора спектральна складова з частотою 3р виникає внаслідок аеродинамічної взаємодії лопатей з вежею ВГ. При проходженні кожної з лопатей повз вежу шар повітря між ними стискається і лопать зазнає пружної дії цього аеродинамічного імпульсу, який спричинює імпульсну нерівномірність обертання валу ротора і, відповідно, вимушені коливання вежі ВГ. Амплітуда цього імпульсу, його тривалість та форма залежать від швидкості обертання ротора, швидкості вітру та інтенсивності турбулентності. Певний менший вклад в складову з частотою 3р та її вищі гармоніки вносить також вертикальний градієнт швидкості вітру у приземному просторі. Якщо ВГ зорієнтований точно на вітер, то відповідні ефектові "тіні вежі" локальні мінімуми сигналу вібрації розміщені на часовій осі у моменти часу, коли вибрана лопать ротора проходить вертикальне нижнє положення, що можна визначити за сигналом давача положення лопатей ротора (Фіг. 3, епюра І) При наявності похибки орієнтації (наприклад, ВГ підставляє лівий борт гондоли вітрові, Фіг. 4) складається ситуація, коли лопать ще не дійшла до вертикального нижнього положення, а аеродинамічна взаємодія між лопаттю і вежею ("тінь вежі") вже настала. Екстремум паразитного сигналу "тіні вежі" у сигналі вібрації з'явиться раніше від опорного сигналу (фіг. 3, епюра III). У протилежному випадку, коли вітер спрямований у більшій мірі на правий бік гондоли ВГ, "тінь вежі" наступає пізніше моменту проходження лопаттю нижнього вертикального положення. Відповідно екстремум паразитного сигналу "тіні вежі" з'явиться пізніше від опорного сигналу (фіг. 3, епюра IV). В отриманому сигналі вібрації майже дві третини (61,5 %) потужності низькочастотної вібрації породжені аеродинамічним ефектом "тіні вежі". Згідно з винаходом момент проходження лопаттю ротора "тіні вежі" ВГ детектують шляхом аналізу низькочастотного сигналу вібрації верхівки вежі ВГ. Акселерометр закріпляють у поперечному або осьовому напрямку всередині машинного відділення. Сигнал вібрації в 6 UA 106680 C2 5 10 15 20 25 30 35 40 45 50 55 діапазоні 0-10 Гц піддають смуговій фільтрації за допомогою лінійного рекурсивного фільтра Баттерворта 4-го порядку з центральною частотою fi=3р=1,435 Гц і шириною смуги пропускання 1р = 0,48 Гц (затінена зона на фіг. 2). Далі вихідний сигнал смугового фільтра з центральною частотою 3р і зі смугою пропускання 1р подають на один з входів цифрового фазометра, на другий вхід якого подають опорний сигнал; на виході отримують модулюючу функцію фази вузькосмугового сигналу. Отримана функція модуляції фази (фіг. 5) вузькосмугової складової сигналу "тіні вежі" містить інформацію про похибку орієнтації ВГ. Наприклад, якщо спостерігається тренд демодульованої фази вузькосмугового сигналу, то можна стверджувати, що в даний проміжок часу відбувається зміна напрямку вітру або ВГ виконує операцію переорієнтації на вітер. Стаціонарні коливання демодульованої фази вузькосмугового процесу відносно певного постійного значення, відмінного від нуля, означають певну сталість похибки орієнтації ВГ. Величина і знак цього постійного значення вказують тривалість і напрям обертання гондоли ВГ для компенсації похибки орієнтації. Коли орієнтація ротора ВГ відносно напряму вітру є правильною, коливання демодульованої фази вузькосмугової складової сигналу "тіні вежі" відбуваються у певному діапазоні амплітуд близько нульового значення фази. На фіг. 6 представлена блок-схема, яка пояснює здійснення відповідного винаходові способу керування орієнтацією ВГ з посиланнями на суттєві для винаходу функціональні вузли відповідного винаходові вітрового генератора. За сигналом давача 6 положення лопатей модуль 9 обробки опорного сигналу формує гармонічний опорний сигнал, який містить інформацію про момент часу проходження лопатями нижнього вертикального положення, і який подають на вхід фазометра 10. На другий вхід фазометра 10 подають сигнал "тіні вежі", сформований із сигналу вібрації давача 5 формувачем 11 і очищений у смуговому фільтрі 12 основної гармоніки сигналу аеродинамічної взаємодії лопатей ротора і вежі. Отриманий на виході фазометра 10 сигнал різниці фаз, відповідний часовій різниці між моментами вертикального нижнього положення лопатей і моментами перебування лопатей на лінії між напрямком вітру і вежею, подають на фільтр 13 нижніх частот, а з його виходу - на вхід модуля 14 керування актуатором орієнтації. Керуючий сигнал з виходу модуля 14 подають на виконавчий привідний елемент - актуатор 8 орієнтації, який здійснює обертання гондоли 2 відповідно до знаку і величини керуючого сигналу, усуваючи похибку орієнтації ротора ВГ на вітер. Форму виконання і параметри фільтра 13 нижніх частот і модуля керування актуатором вибирають в залежності від згаданих вище динамічних параметрів оточення і самого ВГ. Динаміка параметрів вітрового потоку і параметри актуатора орієнтації є визначальними. Відомо, що вітер дме з різною швидкістю, і це впливає на керованість ВГ за азимутом (система орієнтації стає менш ефективною при дуже низьких швидкостях), давач напряму вітру завжди забезпечує неточні і зашумлені дані про напрям. Крім того, динаміка приводу (тип двигунів, передатні числа редукторів, швидкість обертання і крутний момент) ВГ впливає на здатність системи швидко переорієнтувати гондолу за напрямком вітру, слідкувати за ним. Швидкі стохастичні зміни сигналу похибки орієнтації, зумовлені фактичними стохастичними варіаціями напряму вітру і точністю способу визначення похибки орієнтації, заглушуються згладжуючим фільтром таким чином, щоб узгодити швидкості варіації напряму вітру з можливостями актуатора орієнтації ВГ. Так, з досвіду експлуатації подібних вітроенергетичних установок частота зрізу фільтра 13 -3 -3 нижніх частот може перебувати в діапазоні від 5,5·10 Гц до 8,3·10 Гц, а модуль 14 керування актуатором орієнтації може бути виконаний у вигляді Р-регулятора, РІ-регулятора, PIDрегулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці. Наведена блок-схема та її опис покликані пояснити винахідницьку суть способу і не обмежують інші форми здійснення способу. Так, формування і обробка опорного та інформаційного сигналів можуть бути здійснені методами аналогової, імпульсної чи обчислювальної техніки. Фахівці в даній галузі без утруднень зможуть здійснити різні зміни і удосконалення запропонованого винаходу, які теж підпадають під його обсяг, відображений у формулі винаходу. Відповідний винаходові спосіб керування орієнтацією ВГ може бути застосований як для новостворюваних ВГ, так і для дообладнання існуючих. 7 UA 106680 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Спосіб керування орієнтацією вітрового генератора, який містить встановлену на нерухомій вежі (1) з можливістю обертання навколо вертикальної осі гондолу (2) з розміщеним у ній горизонтальним обертовим валом (3) ротора, ротор турбіни, утворений принаймні однією встановленою на валу лопаттю (4), яка перетворює кінетичну енергії вітру на енергію обертання вала (3) ротора, з яким механічно зв'язаний електрогенератор, згідно з яким за допомогою контролера (7) орієнтації обробляють сигнал, залежний від відхилення осі валу (3) ротора від напрямку на вітер, і формують керуючий сигнал зворотного зв'язку, який подають на актуатор (8) орієнтації до досягнення усунення вказаного відхилення, причому керуючий сигнал формують за часовою різницею між моментами часу перебування лопатей (4) у нижньому вертикальному положенні, які визначають за опорним сигналом давача (6), зв'язаного з валом ротора, і моментами часу перебування лопатей (4) на лінії між напрямком вітру і вежею (1), які визначають за сигналом "тіні вежі", зумовленим аеродинамічною взаємодією між лопатями (4) і вежею (1), який відрізняється тим, що сигнал "тіні вежі" формують шляхом реєстрації низькочастотних періодичних вібрацій верхівки вежі (1), зумовлених аеродинамічною взаємодією між лопатями (4) і вежею (1). 2. Спосіб за п. 1, який відрізняється тим, що моменти часу перебування лопатей (4) у нижньому вертикальному положенні формують із опорного сигналу індукційного давача (6) положення ротора, закріпленого нерухомо близько болтів кріплення маточини валу ротора. 3. Спосіб за п. 1, який відрізняється тим, що сигнал "тіні вежі" отримують із сигналу давача (5) вібрації шляхом виконання послідовності дій: формування первинного сигналу коливання вежі (1) вітрового генератора, смугова фільтрація, виокремлення основної гармоніки періодичного сигналу "тіні вежі". 4. Спосіб за п. 1, який відрізняється тим, що часову різницю визначають за допомогою фазометра (10) як різницю фаз між опорним сигналом давача (6) положення лопатей (4) ротора і основною гармонікою періодичного сигналу "тіні вежі". 5. Спосіб за п. 4, який відрізняється тим, що сигнал часової різниці обробляють фільтром (13) нижніх частот. 6. Спосіб за п. 5, який відрізняється тим, що фільтрований сигнал часової різниці подають на вхід модуля (14) керування актуатором (8) орієнтації, який виконаний у вигляді Р-регулятора, РІрегулятора, PID-регулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, і в якому формують керуючий сигнал для актуатора орієнтації. 7. Вітровий генератор, що містить встановлену на нерухомій вежі (1) з можливістю обертання навколо вертикальної осі гондолу (2) з розміщеним у ній з можливістю обертання навколо горизонтальної осі валом (3) ротора, ротор вітрової турбіни, утворений принаймні однією встановленою на маточині валу лопаттю (4), виконаною з можливістю перетворення кінетичної енергії вітру на енергію обертання валу ротора, механічно зв'язаний з валом (3) ротора електрогенератор, виконаний зі здатністю формування керуючого сигналу за фазовою різницею між опорним сигналом і сигналом "тіні вежі" контролер (7) орієнтації, що містить з'єднаний із входом первинного сигналу "тіні вежі" формувач (11), з'єднаний із виходом формувача (11) фільтр (12) основної гармоніки сигналу "тіні вежі", з'єднаний із входом первинного опорного сигналу модуль (9) обробки опорного сигналу, фазометр (10), з'єднаний з виходами модуля (9) обробки опорного сигналу і фільтра (12) основної гармоніки сигналу "тіні вежі", фільтр (13) нижніх частот сигналу часової різниці та з'єднаний з його виходом модуль (14) керування актуатором (8) орієнтації, а також зв'язаний з валом (3) ротора давач (6) опорного сигналу нижнього вертикального положення лопатей (4) ротора, з'єднаний із входом первинного опорного сигналу контролера (7), який відрізняється тим, що містить встановлений на верхівці вежі вітрогенератора давач (5) вібрацій, з'єднаний із входом первинного сигналу "тіні вежі" контролера (7), а також тим, що формувач (11) сигналу "тіні вежі" виконаний у вигляді фільтра нижніх частот з програмно керованою частотою зрізу та підсилювача з програмно керованим коефіцієнтом підсилення. 8. Вітровий генератор за п. 7, який відрізняється тим, що давач (5) вібрацій верхівки вежі виконаний у вигляді давача віброприскорення, давача віброшвидкості або давача вібропереміщення. 9. Вітровий генератор за п. 7, який відрізняється тим, що модуль (14) керування актуатором орієнтації виконаний у вигляді Р-регулятора, РІ-регулятора, PID-регулятора, нейронно 8 UA 106680 C2 мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці. 9 UA 106680 C2 10 UA 106680 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Автори англійськоюMykhailyshyn Viktor Yuriiovych
Автори російськоюМихайлишин Виктор Юрьевич
МПК / Мітки
МПК: F03D 7/04
Мітки: вітровій, вітрового, спосіб, генератор, керування, орієнтацією, генератора
Код посилання
<a href="https://ua.patents.su/13-106680-sposib-keruvannya-oriehntaciehyu-vitrovogo-generatora-ta-vitrovijj-generator.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування орієнтацією вітрового генератора та вітровий генератор</a>
Спосіб керування орієнтацією вітрового генератора та вітровий генератор
Номер патенту: 99876
Опубліковано: 10.10.2012
Автор: Михайлишин Віктор Юрійович
МПК: F03D 7/04
Мітки: генератор, вітрового, орієнтацією, спосіб, генератора, вітровій, керування
Формула / Реферат:
1. Спосіб керування орієнтацією вітрового генератора, який містить встановлену на нерухомій вежі з можливістю обертання навколо вертикальної осі гондолу з розміщеним у ній горизонтальним обертовим валом ротора, ротор турбіни, утворений принаймні двома встановленими на валу лопатями, які перетворюють кінетичну енергію вітру на енергію обертання вала ротора, з яким механічно зв'язаний електрогенератор, згідно з яким за допомогою контролера...
Роторний вітровий генератор
Номер патенту: 73480
Опубліковано: 25.09.2012
Автори: Ягьяев Ельмар Енверович, Абдулгазіс Азіз Умерович, Феватов Сададін Асанович, Халілов Вадім, Абдулгазіс Умер Абдулайович, Подригало Михайло Абович
МПК: F03D 3/04
Мітки: генератор, вітровій, роторний
Формула / Реферат:
Роторний вітровий генератор, що містить закріплені на вертикальній осі криволінійні парні лопаті, спрямовані в одну сторону, із зустрічним зрушенням суміжних кінців за зазначену вісь, який відрізняється тим, що парні лопаті закріплені на вертикальній осі одна над одною, кожна наступна пара яких розгорнута щодо попередньої на кут, кратний числу пар лопатей ротора, при цьому вітровий генератор оснащений кожухом із флюгаркою, установленим з...
Вітровий приймач для пірамідального вітрового двигуна
Номер патенту: 17569
Опубліковано: 16.10.2006
Автор: Степанчук Аркадій Миколайович
МПК: F03D 3/00
Мітки: вітровій, вітрового, пірамідального, двигуна, приймач
Формула / Реферат:
1. Вітровий приймач для пірамідального вітрового двигуна, що включає вертикальну вісь з рівномірно закріпленими на ній пірамідальними лопатями, який відрізняється тим, що опорно-поворотний контур, спираючись у верхній своїй частині на підшипниковий вузол, закріплений на опорному контурі вітрового двигуна, містить коромисло, на яке кріпляться навпроти один одного, відносно центральної частини вітрового приймача, хвостове оперення і вхідний...
Вітровий двигун
Номер патенту: 6059
Опубліковано: 15.04.2005
Автор: Бордюжа Всеволод Вікторович
МПК: F03D 5/00
Формула / Реферат:
Вітровий двигун, що має не менше трьох лопатей з паралельними осями обертання, розташованих на кінцях важелів, симетрично зв'язаних із ротором, який відрізняється тим, що вільне обертання кожної лопаті обмежене з одного і того ж боку уявною площиною, якій належать осі ротора та відповідної лопаті.
Спосіб і пристрій керування орієнтованою ракетою за допомогою приводу, що стежить за орієнтацією траєкторії
Номер патенту: 82858
Опубліковано: 26.05.2008
Автор: Мартіне Дідьє
МПК: G05D 1/08
Мітки: пристрій, керування, спосіб, допомогою, ракетою, орієнтацією, орієнтованою, траєкторії, стежить, приводу
Формула / Реферат:
1. Спосіб керування орієнтованою ракетою за допомогою приводу, що стежить за орієнтацією траєкторії, чутливої до впливу зовнішніх збурень, який полягає в тому, що щонайменше для тангажа (для горизонтальної осі) попередньо визначають правило керування, що містить поправковий член першого порядку, перехідний член, що містить характеристичні параметри ракети і зовнішніх збурень (А6, К1), коефіцієнт (Кр) посилення орієнтації і коефіцієнт (Кv)...
Попередній патент: Спосіб одержання сухого яєчного білка
Наступний патент: Вальцьовий льонобральний апарат
Випадковий патент: Спосіб переробки стічних вод після нанофільтрації молочної сироватки