Спосіб визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об’єкта та прилад, що його реалізує
Формула / Реферат
1. Спосіб визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта за абсолютними та відносними положеннями декількох маятників, який відрізняється тим, що створюють рівнодіючі сили, які забезпечують діаметрально протилежні напрями орієнтації у просторі першої системи маятників так, що вони займають у положенні рівноваги за рахунок сил різної фізичної природи, а також при цьому забезпечують незмінність положень рівноваги при обертанні з постійною кутовою швидкістю двох з них та обертанні інших двох на кут, що дорівнює куту повороту приладу у цілому за умов спокою осі, або її рівномірного прямолінійного руху, або рівномірного обертання приладу навколо загальної горизонтальної осімаятників, що лежить у повздовжній площині, або руху приладу з постійною лінійною швидкістю у поперечній площині судна, при цьому одночасно створюють рівнодіючі сили, які забезпечують різні діаметрально протилежні напрями орієнтації у просторі для другої системи маятників так, що вони займають у положенні рівноваги за рахунок сил різної фізичної природи, а також при цьому забезпечують незмінність положень рівноваги при обертанні з постійною кутовою швидкістю двох з них та обертанні інших двох на кут, що дорівнює куту повороту приладу у цілому навколо загальної горизонтальної осі маятників, що лежить у поперечній площині, за умов спокою осі, або її рівномірного прямолінійного руху, або руху приладу з постійною лінійною швидкістю у повздовжній площині судна; а також одночасно створюють рівнодіючі сили, які забезпечують різні діаметрально протилежні напрями орієнтації у просторі двох додаткових маятників так, що вони займають у положенні рівноваги за рахунок сил різної фізичної природи та магнітної стрілки, а також обертання їх двох на кут, що дорівнює куту повороту приладу у цілому за умов спокою або руху приладу з постійною лінійною швидкістю у горизонтальній площині навколо їх загальної вертикальної осі, створюють умови для швидкого забезпечення затухання коливань маятників навколо кожної з власних осей для усіх трьох систем, фіксують миттєві положення неконтактними засобами одразу усіх маятників у просторі, тарують окремо прискорення обертальних та поступальних рухів приладу у цілому за показниками еталонних приладів вимірювання проекцій векторів кутових положень і прискорень та лінійних прискорень за результатами визначення відносних кутових положень маятників по їх кутових положеннях у просторі та положеннях рівноваги за заданий проміжок часу, розраховують проекції прискорень по відносних кутових положеннях пристроями для розрахунку за відомими алгоритмами та даними тарування, визначають за положеннями рівноваги маятників за заданий проміжок часу проекції вектора кутового положення судна або іншого морського рухомого об'єкта за допомогою пристроїв для розрахунку та даними тарування.
2. Прилад визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта, що реалізує спосіб по пункту 1, який містить корпус, маятники, що здатні вільно коливатися навколо осі і які зібрано у блоки, який відрізняється тим, що таких блоків маятників три, у першому блоці два маятники позитивної та негативної плавучості шарнірно розміщені на спільній вісі діаметрально протилежно за напрямами орієнтації положення рівноваги догори та до долу відповідно, яке вони займають у стані спокою або прямолінійного рівномірного руху, а інші два маятники нульової плавучості займають відносно тієї ж спільної осі горизонтальне протилежно-орієнтоване один до одного положення рівноваги, яке є незмінним відносно корпусу приладу, загальна вісь чотирьох маятників лежить у горизонтальній площині за повздовжнім напрямом, другий блок обладнано двома маятниками позитивної та негативної плавучості, які шарнірно розміщені на спільній осі діаметрально протилежно за напрямами орієнтації догори та до долу відповідно, яке вони займають у положенні рівноваги, а інші два маятники нульової плавучості займають відносно тієї ж спільної осі горизонтальне, протилежно орієнтоване один до одного положення рівноваги, яке є незмінним відносно корпусу приладу, загальна вісь чотирьох маятників лежить у горизонтальній площині за поперечним напрямом, а третій блок маятників має магнітну стрілку та два горизонтальних маятники нульової плавучості, які займають відносно тієї ж спільної вертикальної осі горизонтальне, протилежно-орієнтоване один до одного положення рівноваги, яке є незмінним відносно корпусу приладу, і які вільно обертаються навколо загальної осі; маятники містять отвори, у яких закріплено елементи плавучості; корпуси блоків, у яких закріплено осі та розміщено маятники, виготовлено із феромагнітних матеріалів або екрановано замкненими оболонками із неферомагнітних матеріалів, їх оснащено компенсаторами та залито прозорою рідиною, у них містяться датчики визначення кутового положення маятників, які з'єднано через інтерфейс АЦП з ПЕОМ, виходи з якої з'єднано з дисплеєм та через ЦАП з індикатором та реле із звуковою сигналізацією.
3. Прилад визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта за п. 2, який відрізняється тим, що горизонтальні маятники третього блока з вертикальною віссю містять магніти, а для кожного з них з двох боків розташовано однойменними полюсами магніти, а магнітна стрілка реалізована як третій маятник, який виконано як мініатюрний гіроскоп, який шарнірно розміщено на спільній осі маятників третього блока, напрям якого задається та корегується через ПЕОМ, для одночасної фіксації кутового положення маятників передбачені системи відеоспостереження, виходи з яких заведено до ПЕОМ.
Текст
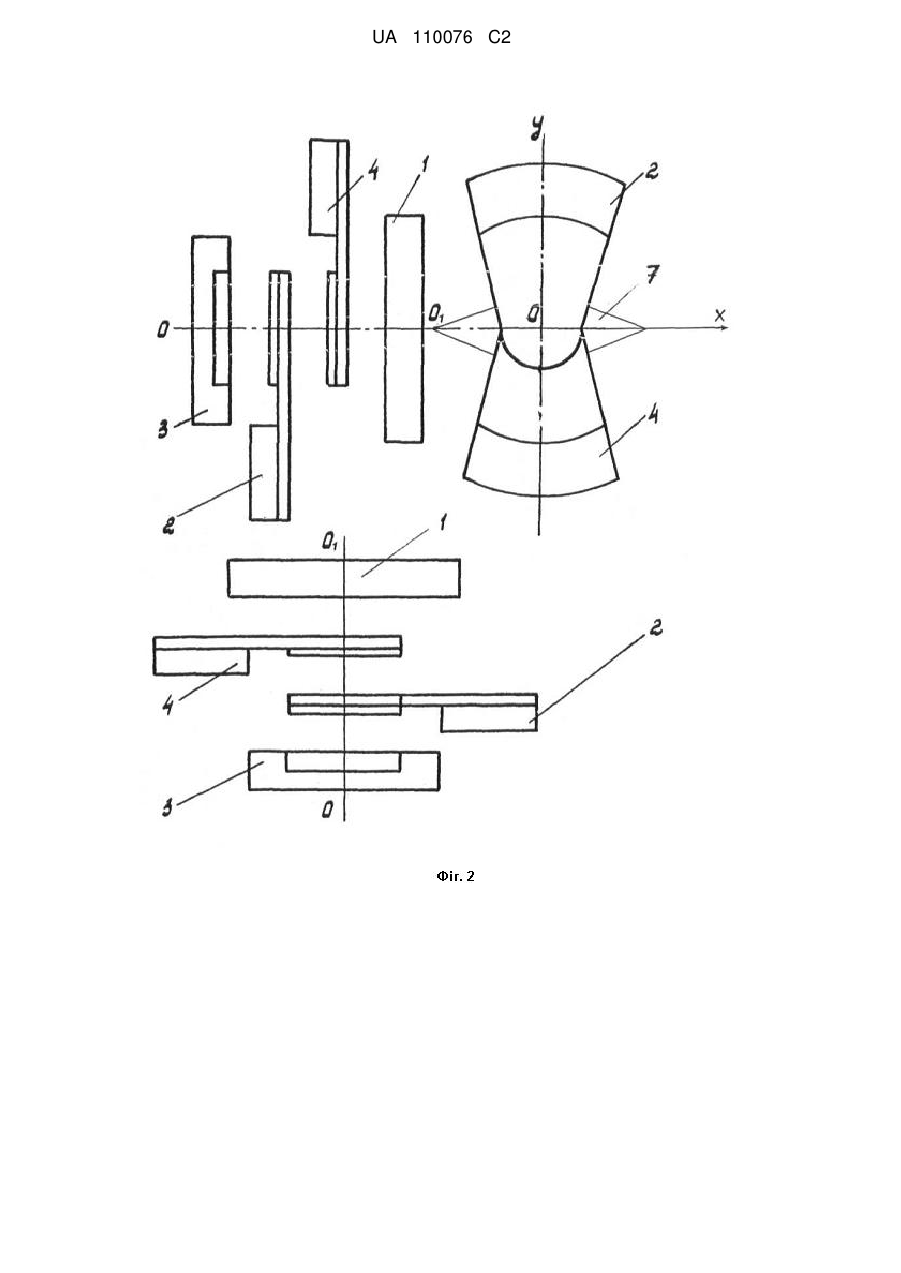
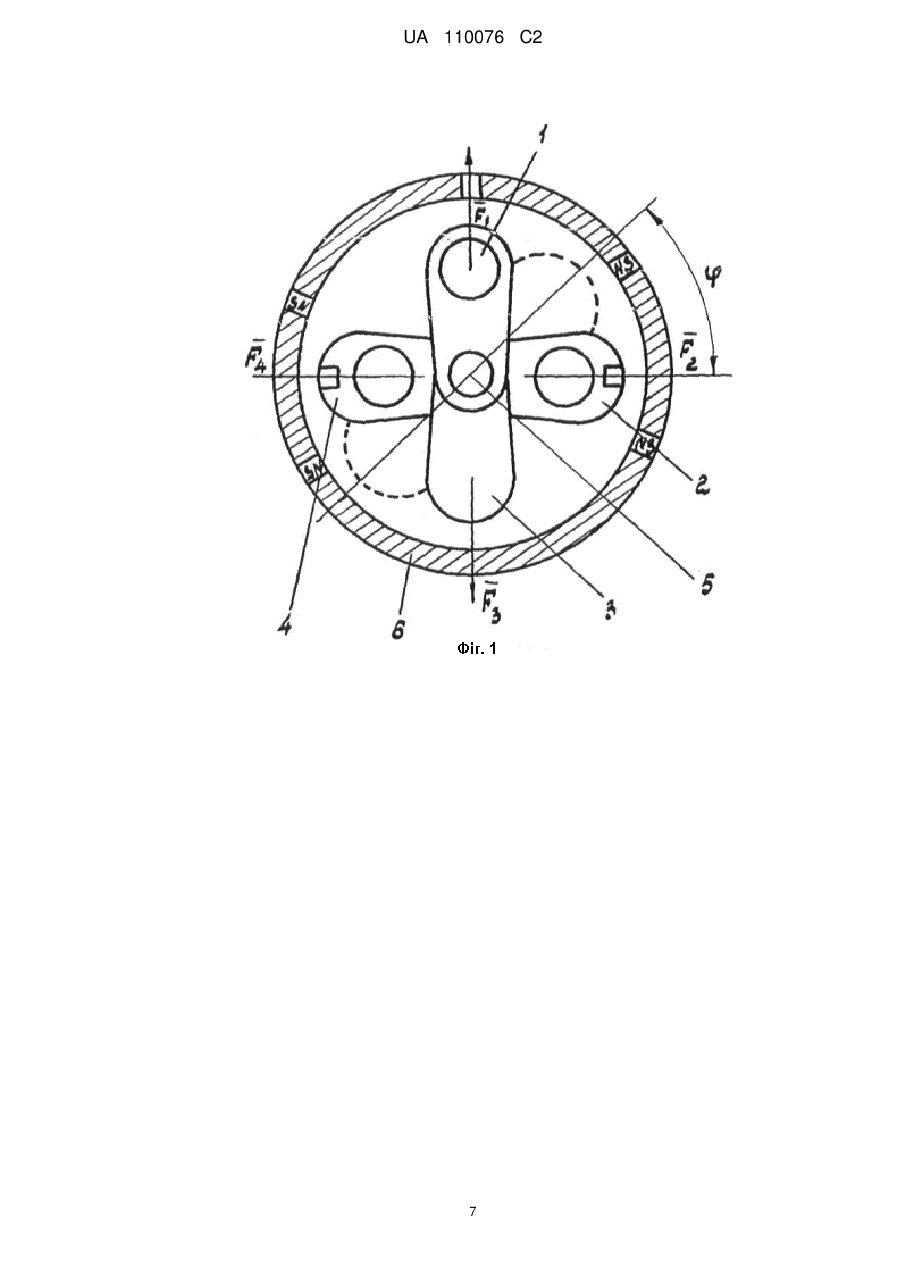
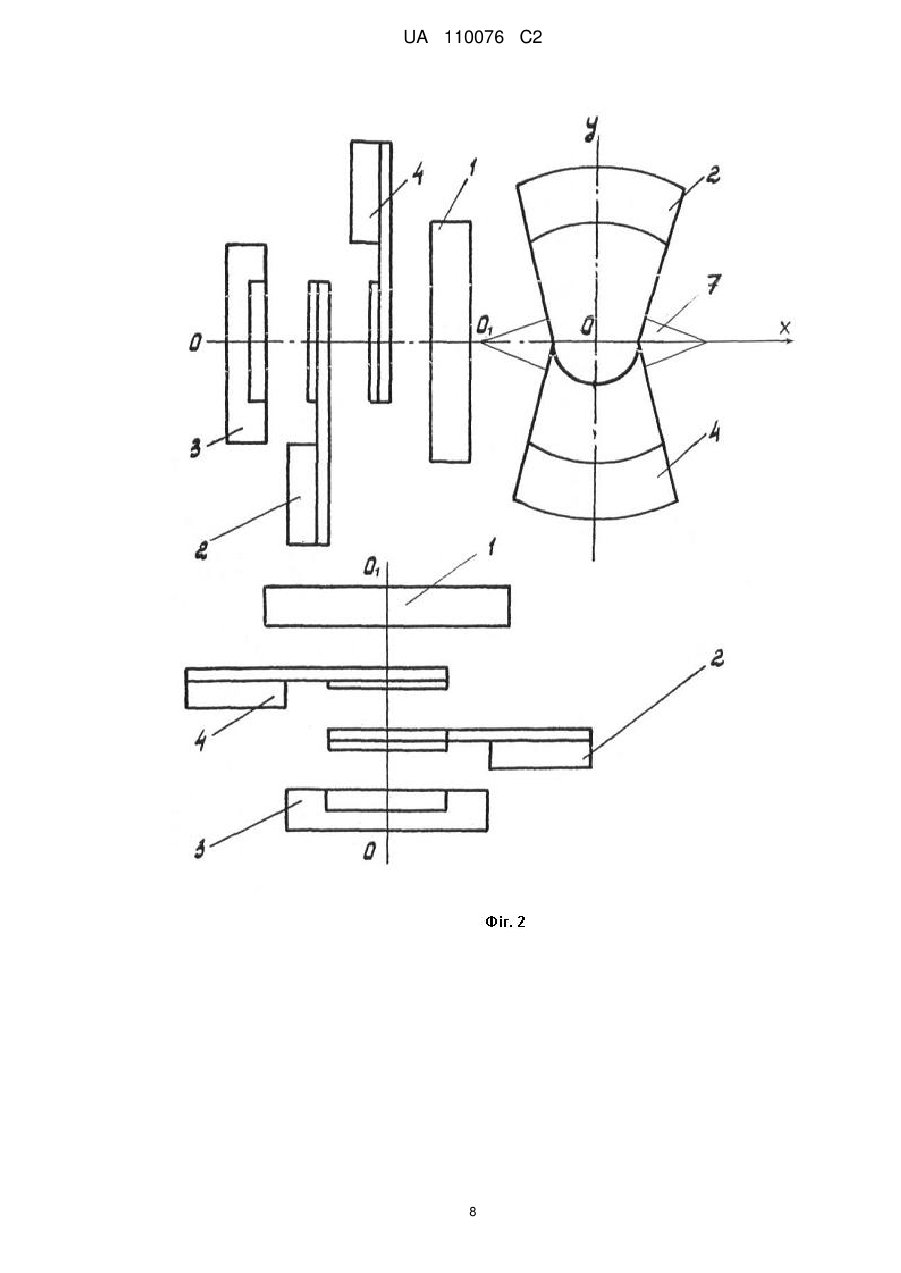
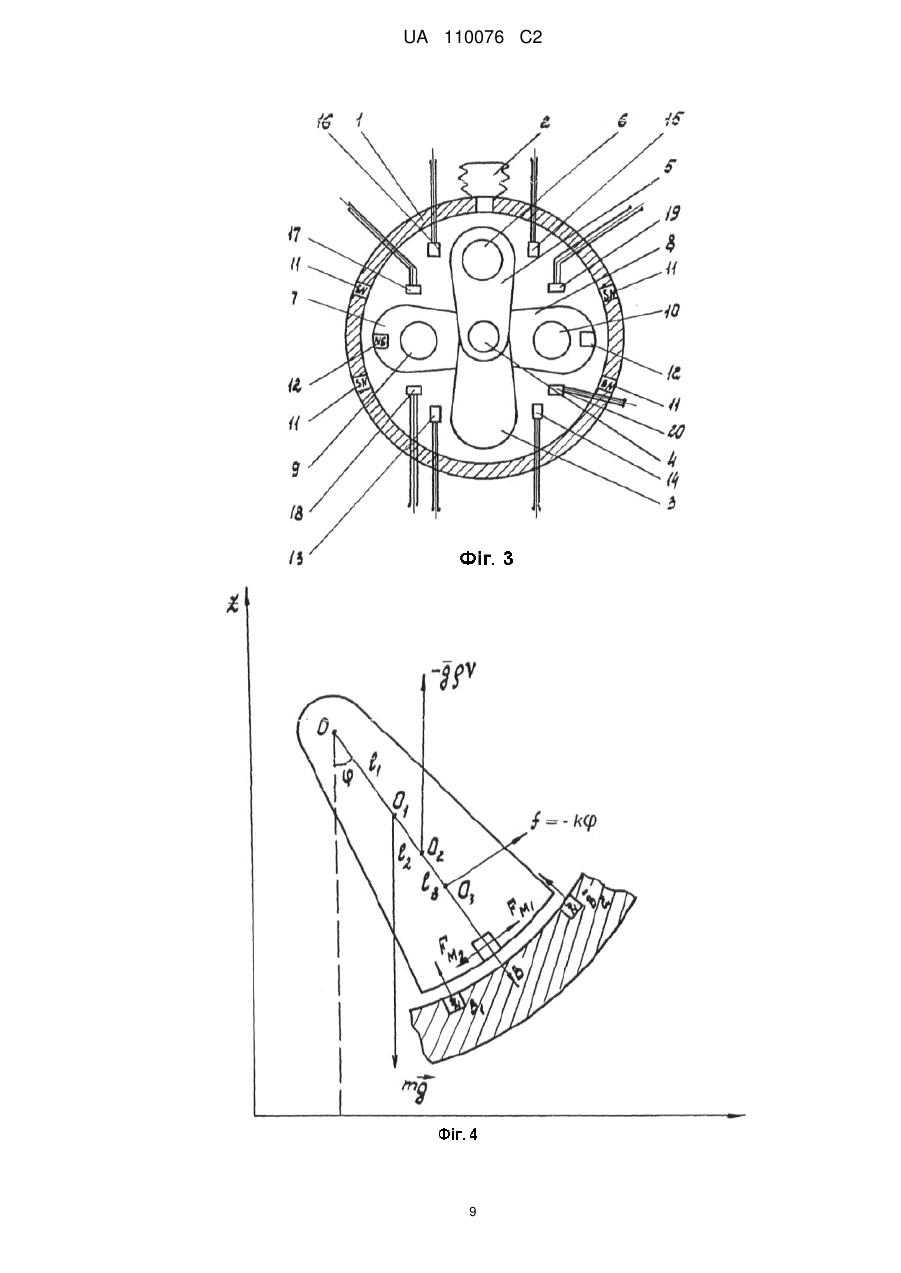
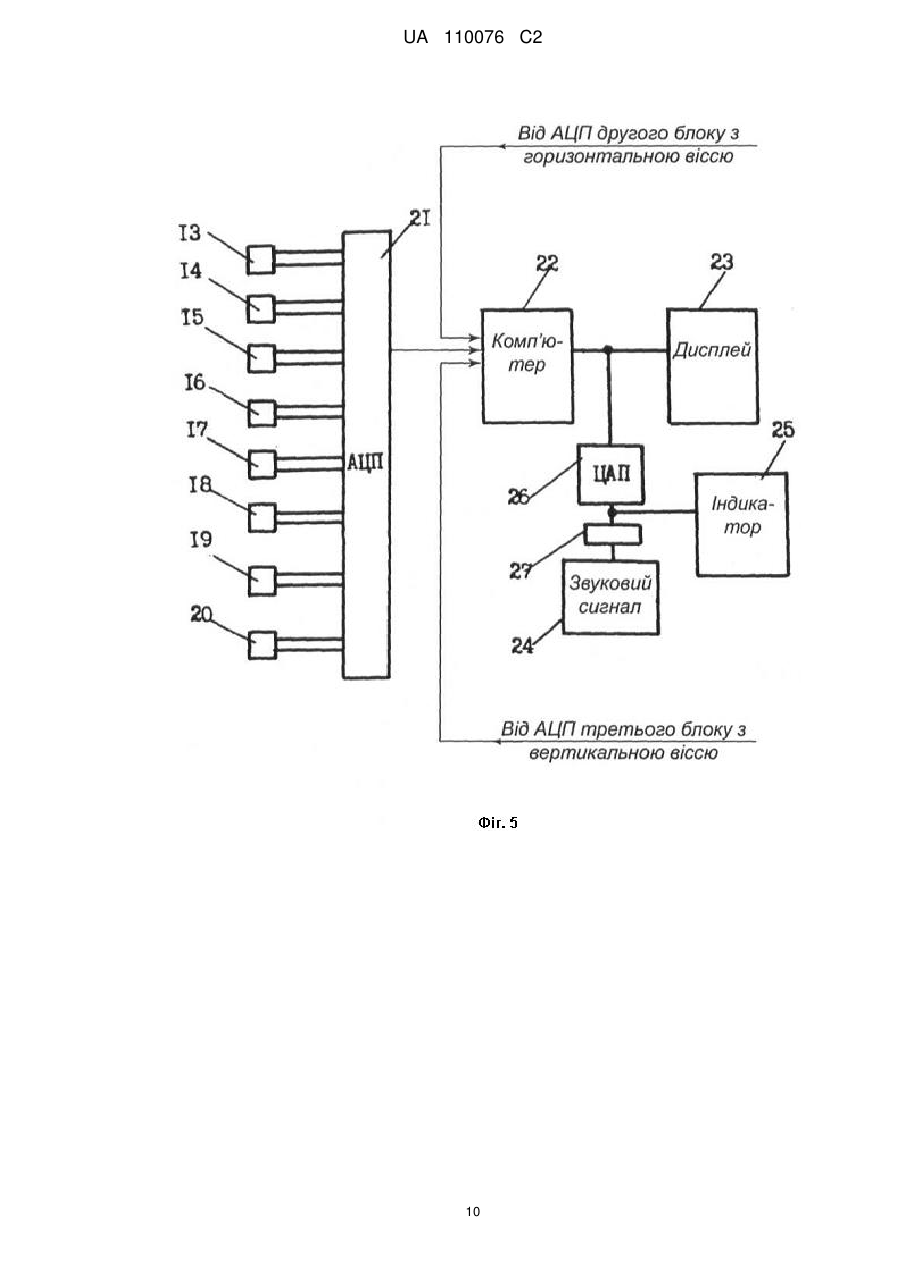
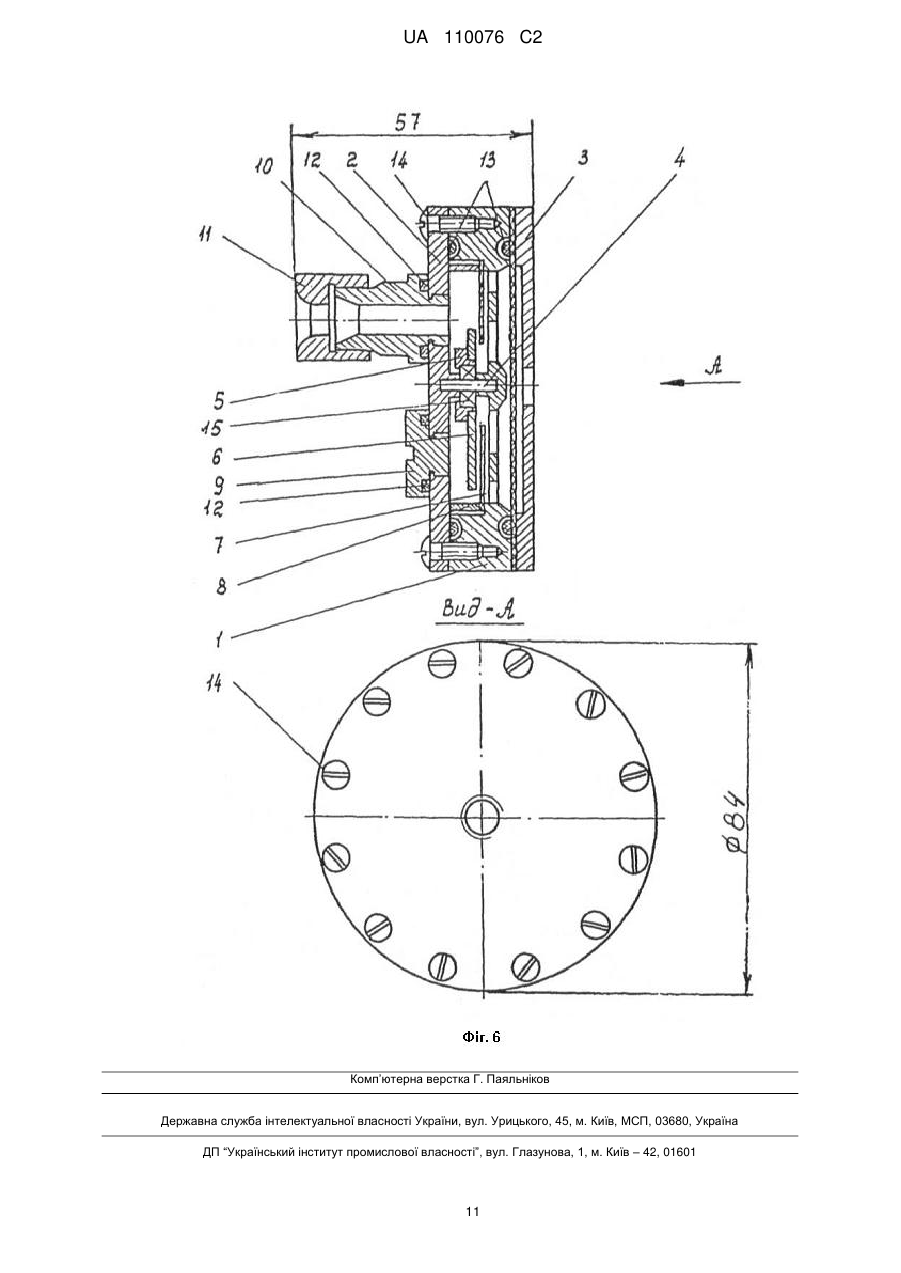
Реферат: Група винаходів належить до контрольно-вимірювальної техніки. Спосіб визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта виконують, створюючи рівнодіючі сили, які забезпечують діаметрально протилежні напрями орієнтації у просторі двох ортогонально розташованих систем маятників так, що вони займають у положенні рівноваги за рахунок сил різної фізичної природи, а також при цьому забезпечують незмінність положень рівноваги при обертанні з постійною кутовою швидкістю двох з них та обертанні інших двох на кут, що дорівнює куту повороту приладу у цілому за умов спокою осі, або її рівномірного прямолінійного руху, або рівномірного обертання приладу навколо загальної горизонтальної осі маятників, що лежить у повздовжній площині, або руху приладу з постійною лінійною швидкістю у поперечній площині судна. Застосована також третя система маятників з магнітною стрілкою. Передбачений прилад для реалізації способу. Технічним результатом є підвищення точності. UA 110076 C2 (12) UA 110076 C2 UA 110076 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до контрольно-вимірювальної техніки та може бути застосований у глибоководних підводних апаратах та надводних кораблях, а також на інших плавзасобах як датчики для систем контролю безпеки суден на воді. Відомі інерційні датчики визначення лінійних і кутових прискорень, які використовують інерційні елементи, та перетворювачі, завдяки яким діючі на них сили перетворюються у електричні сигнали [1]. Однак, слід зауважити, що керування морськими та річковими рухомими надводними та підводними об'єктами вимагає неперервної оцінки їх стану. Увесь процес керування рухом характеризується малими часовими та просторовими інтервалами. При цьому рухомий засіб, будь-то корабель, або апарат, або іншій носій технологічного устаткування та інструменту, не може розглядатися як матеріальна точка. Його слід розглядати у кращому випадку як абсолютно тверде тіло, що рухається у просторі, миттєвий стан якого оцінюється швидкістю поступального руху центру мас та обертального навколо осей, що проходять крізь центр мас, а також кутовою орієнтацією об'єкта у просторі. Таким чином, дванадцять кінематичних змінних характеризують миттєве положення морського рухомого об'єкта. Математичні моделі забезпечують зв'язок між кінематичними параметрами і збурюючими та керуючими впливами. Вихідними даними для керування, як правило, є значення кінематичних параметрів, які визначаються технічними засобами. Існуючі технічні засоби дозволяють визначити прискорення та розрахувати за ними шляхом інтегрування значення швидкостей. Визначення же кутових положень ускладнено, оскільки інерційні сили викривляють показники гравітаційних приладів, а гіроскопічно стабілізовані прилади мають велику масу та габарити, що унеможливлює їх використання у системах управління малогабаритними рухомими об'єктами. Крім того, зазначені датчики та прилади визначення кутового положення, що побудовано з їх використанням, дозволяють вимірювати тільки одну з компонент вектора прискорень, що безумовно є їх недоліком, оскільки необхідно використовувати три взаємно ортогональних датчика. Зазначимо також, що величина похибки їх показів зумовлена гравітаційним полем землі, яке викривлює значення вектора прискорення вільного падіння. У зв'язку з цим застосовують корекцію показників залежно від кутового положення або стабілізовані у просторі платформи. Останні погіршують масогабаритні показники та збільшують вартість таких систем. Відомий винахід [2], у якому запропоновано прилад визначення стану судна за частотними характеристиками. Він містить інерційні маси та реалізує спосіб їх визначення за допомогою однієї квазіпружної сили та сил інерції. Крім того, невизначеність у просторі векторів цих сил вносить похибку в дані про прискорення. Відомий також винахід [3], що містить пристрій аварійної сигналізації судна, який на основі амплітудно-частотних характеристик кутових положень судна, котрі визначаються інерційними датчиками, за критеріями безпеки оцінюють аварійний стан судна. Однак недоліком цього способу та пристрою, який його реалізує, є відсутність інформації про абсолютні величини кутів крену і диференту та лінійних і кутових прискорень, що не дозволяє враховувати початкове положення човна для визначення стійкості та стану у момент удару одиничних хвиль і вибухових навантажень. Відомий також осцилограф Бертона, що містить два маятники. Відомі роботи академіка О.М. Крилова, які свідчать, що маятники малого та великого періоду на човні дозволяють визначити положення нормалі до хвилі та положення човна. Осцилограф Бертона у своїй основі складається з двох маятників. Один з них, який називають "малим маятником", має невеликий період власних коливань порядку 0,5 секунди та таку форму, що коливання швидко затухають. Другий маятник, який називають "великим маятником", має достатньо великий період коливань, приблизно від 70 до 80 секунд. Цей маятник виготовлено у вигляді врівноваженого ободу діаметром у 120 см та масою 200 кг. Його вісь з метою зменшення тертя встановлено на роликові підшипники. Корпус, який несе обидва маятники, оснащено годинниковим механізмом, що переміщує перед ними паперову стрічку, на якій автоматично за допомогою відзначників реєструється час та положення маятників. Закріплений до корпусу відзначник реєструє середню лінію при прямому та спокійному положенні човна. Вони обидва позначають одну й ту ж середню лінію. У осцилографі Бертона використовується спосіб визначення кутового положення за величиною однієї квазіпружної сили гравітаційної природи, що діє на обидва маятники. Природно, що вона одна не дозволяє за відносним кутовим положенням маятників визначити кутове положення судна при рівних умовах, тобто T1=Т2. Бажання визначити кутове положення судна призводить до суттєвого збільшення T1 / T2 , а значить до збільшення маси та габаритів маятників. Також слід відзначити, що спосіб визначає положення тільки у одній площині, а заміри їх у двох інших площинах вимагають двох ідентичних систем. Усе це разом не 1 UA 110076 C2 5 10 15 20 25 30 35 40 45 50 55 дозволяє розглядати цей спосіб для впровадження у сучасні прилади безпеки суден, тому він і був забутий протягом десятків останніх років. Теоретично автором пропонованого способу заново переглянуті результати робіт академіка О.М. Крилова та встановлено, що використання квазіпружних сил різної фізичної природи з декількома різноорієнтованими положеннями рівноваги визначає кутове положення приладу навіть для ідентичних маятників малої маси та габаритів і відповідно періоду, тобто при T1 T2 ...Tn 0 , що дозволяє зменшити масу приладу у цілому. Задачею способу визначення кутового положення, що пропонується, є зменшення масогабаритних характеристик, а також підвищення точності визначення кутових положень та кутових і лінійних прискорень для оцінки небезпеки стану судна в умовах зовнішніх впливів. Дана задача вирішується за рахунок застосування двох вимірювальних систем, осі яких встановлено взаємно ортогонально одна до одної. Кожна з цих систем складається з двох пар елементів - фізичних маятників малого періоду. При нульових кутах і прискореннях елементи кожної з пар протилежно орієнтовані за умов дії на них двох квазіпружних сил різної фізичної природи, наприклад гравітаційних, архімедових, магнітних або навіть пружних, вектори яких орієнтовані протилежно один до одного, а лінії дії яких лежать на одній прямій. Лінії дії кожної з цих пар елементів розташовано при цьому взаємно перпендикулярно, а положення рівноваги зорієнтовані за чотирма взаємно ортогональними положеннями. Лінія дії однієї з квазіпружних сил орієнтована вертикально і зберігається при будь-яких кутових положеннях приладу, а лінія дії другої пари елементів повертається разом з приладом. Останнє справджується тільки у статиці або у стані прямолінійного рівномірного руху, тобто при ах=ау=az=0. Дві ідентичних системи розташовуються за двома взаємно ортогональними вертикальними площинами, при цьому їх осі обертання елементів лежать у площині горизонту перпендикулярно до цих вертикальних площин. Додаткова третя система містить два маятники ідентичної конструкції, вектори квазіпружних сил яких і положення рівноваги лежать у статиці на одній прямій, та магнітну стрілку, яка має з цими маятниками вертикальну спільну вісь і вільно обертається у площині горизонту. Сили, що орієнтують маятники у додатковій системі, можуть бути пружної природи. Маятники і корпус виконуються з неферомагнітних матеріалів. Таким чином, задача способу вирішується за рахунок послідовного визначення миттєвих кутових положень маятників, а за ними визначають відносне кутове їх зміщення, що дозволяє розраховувати відповідні проекції векторів прискорень та вектор кутового положення судна. Все це реалізується при однакових маятниках малого періоду, а значить малих габаритах та масах, що забезпечує і підтверджує вирішення задачі. Спосіб реалізовано за рахунок наступної послідовності пропонованих дій: - створення умов для забезпечення діаметрально протилежних напрямів орієнтації у просторі маятників, що вони займають у положенні рівноваги, за рахунок сил різної фізичної природи, а також при цьому забезпечують незмінність положень рівноваги при обертанні з постійною кутовою швидкістю двох з них та обертання інших двох на кут, що дорівнює куту повороту приладу у цілому за умов спокою осі або її рівномірного прямолінійного руху, або рівномірного обертання приладу навколо загальної горизонтальної осі маятників, що лежить у повздовжній площині, або руху приладу з постійною лінійною швидкістю у поперечній площині судна; - створення умов для забезпечення різних діаметрально протилежних напрямів орієнтації у просторі маятників, що вони займають у положенні рівноваги, за рахунок сил різної фізичної природи, а також при цьому забезпечують незмінність положень рівноваги при обертанні з постійною кутовою швидкістю двох з них та обертання інших двох на кут, що дорівнює куту повороту приладу у цілому навколо горизонтальної осі за умов спокою осі або її рівномірного прямолінійного руху, що лежить у поперечній площині, або руху приладу з постійною лінійною швидкістю у повздовжній площині судна; - створення умов для різних діаметрально протилежних напрямів орієнтації у просторі маятників, що вони займають у положенні рівноваги за рахунок сил різної фізичної природи та магнітної стрілки, а також обертання їх двох на кут, що дорівнює куту повороту приладу у цілому, за умов спокою, або руху приладу з постійною лінійною швидкістю у горизонтальній площині навколо вертикальної осі; - створення умов для швидкого забезпечення затухання коливань маятників навколо власної загальної осі; - забезпечення фіксації миттєвих положень не контактними засобами одразу усіх маятників у просторі; 2 UA 110076 C2 5 10 15 20 25 30 35 40 45 - забезпечення умов для тарування прискорень обертальних та поступальних рухів приладу у цілому за показниками еталонних приладів вимірювання проекцій векторів кутових положень і прискорень та лінійних прискорень; - визначення відносних кутових положень маятників по їх кутовим положенням у просторі та положень рівноваги за заданий проміжок часу; - розрахунок проекцій прискорень по відносним кутовим положенням спеціальними пристроями для розрахунку за відомими алгоритмами та даними тарування; - визначення за положеннями рівноваги маятників за заданий проміжок часу проекції вектора кутового положення судна за допомогою спеціальних пристроїв для розрахунку та даними тарування. Суть вказаних ознак доводиться тим, що перша з них забезпечує можливість компенсувати дію гравітаційних сил, доповнюючи їх дію, наприклад, магнітними та архімедовими силами. Наявність другої дозволяє зафіксувати орієнтацію у просторі. Наявність третьої та четвертої визначити кутові положення відповідно до вертикалі у різних площинах та магнітної стрілки у горизонтальній площині. Наявність з п'ятої по десяту ознаки дозволяє за кутовими відхиленнями за різними знаками відхилення маятників за даними тарування розрахувати проекції прискорення на напрямок горизонту чи вертикалі. Загальна вісь зменшує похибку визначення проекцій прискорень у площині, що є перпендикулярною до цієї осі, оскільки вона проходить крізь одну точку цієї площини, але що стосується похибки визначення вектора прискорень за напрямом осі, то вона існує, та зменшити її неможливо у силу неможливості сумістити площини коливань маятників, що зумовлено величиною їх розмірів. Наявність двох систем, що містить по чотири маятники кожна, дозволяє розрахувати вектор кутових положень та прискорень у просторі як середнє в об'ємі приладу. Наявність третьої ознаки забезпечує визначення курсової орієнтації судна або морського рухомого об'єкта. Слід зазначити, що принцип курсової орієнтації за магнітною стрілкою може бути замінено на інший, що забезпечує фіксовану стабілізацію орієнтації, наприклад гіроскопічний принцип, за цих умов гіроскоп теж підвішують на ту ж саму вісь, що і два горизонтальні маятники. На фіг. 1 подана схема реалізації способу визначення трьох проекцій вектора лінійних прискорень та вектора кутових прискорень і положень. На фіг. 2 подана схема розташування трьох блоків у повздовжній та поперечній площині горизонтально у просторі двох взаємно ортогональних осей, на кожній з яких коливається по чотири маятники (корпуси з магнітами кожного з них умовно не показані), і третьої вертикальної осі третього блока з двома маятниками, що коливаються навколо неї, та магнітною стрілкою 7 (корпус з магнітами для маятників теж умовно не показано). Кожен з перших двох можливо зібрати як окремі ідентичні блоки. У третьому блоці два маятники зібрано у магнітнозамкненому феромагнітному корпусі, а магнітна стрілка у неферомагнітному корпусі, яку необхідно ще й виокремити, лишаючи такою, що обертається навколо цієї ж вертикальної осі. На фіг. 3 подано схему приладу, що реалізує пропонований спосіб визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта. На фіг. 4 подано схему реального маятника, а на фіг. 5, 6 подано схему з'єднань у реальному приладі. Спосіб визначення трьох проекцій вектора лінійних прискорень та вектора кутових прискорень і положень (спочатку розглянемо визначення проекцій цих векторів на одну площину, що перпендикулярна до осі) передбачає створення квазіпружних сил F1 , F2 , F3 , F4 , які розташовують маятники 1-4 відповідно вертикально та горизонтально відповідно до фіг. 1 та фіг. 2 при нульовому початковому кутовому положенні та ах = аy = аz=0. На фіг. 1 та фіг. 2 позначено F1 - архімедова сила, F3 - сила гравітаційної взаємодії з 50 55 Землею, сили F2 і F4 - магнітної взаємодії. Кожна з цих сил, архімедова та гравітаційна (рівнодіюча, що діє на маятник, зорієнтована відповідно за напрямом архімедової та гравітаційної сили), направлена по вертикалі догори та до долу, при обертанні приладу на кут φ навколо осі не змінює свого положення у просторі, тоді як напрям векторів F2 і F4 не змінюється відповідно до положення корпусу приладу, а значить вони повертаються на кут, що дорівнює куту повороту приладу φ. Таким чином відносний кут обертання маятників 2-4 (відносно до положення маятників, які орієнтовано таким чином, що їх рівнодіючі направлені по вертикалі) дозволяє, у статиці, визначити кутове положення приладу, а значить і об'єкта, на якому його розміщено. При обертанні об'єкта з постійною кутовою швидкістю швидкість зміни відносного кута між маятниками 1 та 2 або 3 та 4 буде дорівнювати проекції кутової швидкості об'єкта, будь то підводний апарат або надводний човен, або інший рухомий об'єкт. Під впливом 3 UA 110076 C2 лінійного прискорення, перпендикулярного до осі (горизонтального або вертикального), маятники повертаються попарно, непарні та парні, один відносно одного. Кут зміщення за умов ідентичності жорсткості маятників буде пропорційним величині проекції вектора прискорення на напрям, перпендикулярний до первинного положення лінії дії векторів F 1 5 0 , 0 F3 F2 F4 . При 0 0 динамічному впливі у силу принципу суперпозиції сили F2 і F4 та сили інерції, що діють на елементи 1-4, будуть утворювати сумарну картину, аналогічну тій, що була описана вище для послідовності окремих впливів, тобто по відносному кутовому зміщенню ліній дій векторів F1 , F3 та F2 , F4 визначаємо кутове положення приладу, а по відносному положенню ліній дій векторів F 1 10 15 20 25 30 35 40 45 50 55 0 , 0 F3 F2 F4 , проекції вектора прискорення на напрям, перпендикулярний до 0 0 площини ліній дії векторів, а по швидкості зміни кутового положення - кутову швидкість та кутове прискорення. Прилад, що реалізує спосіб визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта, може бути зібрано з ідентичних двох блоків визначення проекцій вектора кутового положення на одну з осей, які можуть бути використані для визначення крену та диференту. Приклад такого блока подано на фіг. 3. За цих умов зазначимо, що нумерація позицій повинна бути введена нова, ніж на фігурах 1 та 2, які пояснювали опис способу. Прилад містить герметичний корпус 1, що заповнено в'язкою та прозорою рідиною (на фігурах не показано). Для компенсації стисненості рідини до складу конструктивних елементів датчика включено компенсатор 2, з'єднаний з корпусом 1. У корпусі 1 розміщено маятник 3 негативної плавучості, який шарнірно з'єднано з віссю 4. На тому ж валу, не залежно від маятника 3, шарнірно закріплено маятник 5 позитивної плавучості. Остання досягається завдяки розміщенню у отворі 6 та закріпленню тіла (елемент плавучості), питома вага якого менша за питому вагу рідини, а величина об'єму визначена, виходячи з необхідної величини позитивної плавучості маятника у цілому (на фіг. 3 не показано). Маятники 7 та 8 нульової плавучості шарнірно закріплено на цьому ж валу 4, незалежно від маятників 3 та 5. Нульова плавучість забезпечена завдяки розміщенню у порожнинах 9 та 10 тіл, які виготовлено з матеріалу, густина якого менша за густину рідини (на фіг. 3 не показано). Усі шарніри чотирьох маятників дозволяють тільки вільно обертатись у площині, перпендикулярній до загальної (спільної) осі. Як шарніри можуть бути використані циліндричні радіально упорні підшипники кочення або ковзання. У корпусі 1 та маятниках 7 і 8 містяться постійні магніти 11 та 12 відповідно, які орієнтовано один до одного різнойменними полюсами. Осі магнітів проходять крізь вісь вала 4 та маятників, кожен з яких у рівноважному стані розташовано горизонтально. Відхилення від положення рівноваги реєструється двома неконтактними датчиками переміщення, за які можуть бути застосовані ємнісні або струмовихрові неконтактні датчики переміщення. Датчики 13-20 однакового принципу дії. Вони розташовуються по обидві сторони рівноважного положення маятників 3, 5, 7, 8 таким чином, щоб не заважати вільному переміщенню маятників. Разом з цими датчиками систему додатково (на фіг. 3 не показано) обладнано датчиками відносного кутового зміщення маятників 3 і 5, а також маятників 7 відносно 8. Як датчики 13-20 та додаткові відносного положення можуть бути застосовані і датчики іншого фізичного принципу дії, наприклад, відомі системи відеоспостереження, у полі зору яких знаходяться одразу усі чотири маятники. Кожен з трьох блоків, із яких зібрано прилад у цілому, має аналогічні датчики 13-20 та додаткові відносного положення. Датчики реєструють як позитивні, так і негативні кутові зміщення (датчики на фіг. 3 показано умовно у вигляді прямокутників та двох дротів з'єднання, умовно показано тільки два як дві пари живлення та сигналу із спільним нулем). Перші два блоки містять по чотири маятники, осі яких розташовані у горизонтальній площині, а самі вони коливаються у повздовжній та поперечній площинах. Третій блок має два горизонтальних маятники 2, 4 (фіг. 2 вид згори) та магнітну стрілку 7, що мають спільну вертикальну вісь. Корпуси блоків, у яких закріплено осі та розміщено маятники, можуть бути виготовлено як окремою конструкцією, так і об'єднані у збірку, але ці ознаки не є суттєвими. Для знищення впливу зовнішніх магнітних полів корпуси блоків виготовлено замкнутими із феромагнітних матеріалів або екрановано замкнутими із феромагнітних матеріалів оболонками, а осі виготовлено із не феромагнітних матеріалів, магнітна стрілка взагалі винесена за феромагнітний корпус та розташована на спільній осі у окремому корпусі із не феромагнітного матеріалу. Слід зазначити, що роль незмінного орієнтира курсу магнітної стрілки 7 (фіг. 2) може замінити і мініатюрний гіроскоп, напрям якого може задаватись та 4 UA 110076 C2 5 10 15 20 25 30 35 40 45 50 55 60 корегуватися за допомогою ПЕОМ, але який розміщено на спільній осі маятників третього блоку. Блок працює наступним чином. При силовому впливі на нього маятники 3 та 5 під впливом сил інерції відхилюються від положення рівноваги. Так, якщо на блок діє сила, то під дією горизонтальної складової відхиляються маятники 3 і 5, а під дією вертикальної - маятники 7 і 8. Разом із відхиленням від положення рівноваги кожного з маятників виникає відносне кутове зміщення маятника 3 відносно маятника 5 та маятника 7 відносно маятника 8. Це кутове зміщення реєструється датчиками відносного кутового зміщення, яке, у свою чергу, пропорційне відповідним складовим вектора лінійних прискорень. При впливі на блок моментів відносно осі вала 4 кутове зміщення кожного з маятників пропорційно моменту, оскільки усі вони мають однакові жорсткості, коефіцієнти опору, моменти інерції, приєднані маси. При одночасному впливі моменту та сил середнє значення кутового зміщення маятників 3 та 5 чи 7 та 8 відповідно до корпусу пропорційно моменту сил, а відносне кутове зміщення маятника 3 і 5 та 7 і 8 пропорційне горизонтальній та вертикальній складовій лінійних прискорень (фіг. 3). Датчики 13-20 (фіг. 5, показано з'єднання тільки для одного блока, для інших тільки умовно) усіх трьох блоків через аналогічний інтерфейс 21 з'єднано з ПЕОМ 22, яка, у свою чергу, після обробки видає інформацію на дисплей 23 та сигналізуючи пристрої: звуковий 24 та світловий 25 сигналізатори. У випадку, коли у третьому блоці роль магнітної стрілки відіграє мініатюрний гіроскоп, то його системи керування і контролю також з'єднано з ПЕОМ 22 (на схемі фіг. 5 не показано). У випадку, коли датчики 13-20 доповнюють або замінюють відеосистемами спостереження, вихідний сигнал з усіх систем відеоспостереження передається безпосередньо до ПЕОМ 22. Як зазначені пристрої можуть бути використанні традиційні пристрої. Наприклад, АЦП, які входять до інтерфейсного блока 21, виконані на мікросхемах серії 1107 і ЦАП блок 26 на мікросхемах серії 1113, які задовольняють вимоги до інтерфейсного блока 25. Як ПЕОМ може бути використано загальноуживану стаціонарну машину або ноутбук із дисплеєм. Як сигналізатори - звичайні звукові дзвоники гучного бою, з'єднані з ЦАП 26 через реле 27. Світлова сигналізація містить панель світлодіодов, наприклад надяскравих. Система працює наступним чином. Сигнал із датчиків трьох блоків передається через інтерфейс 21 до ПЕОМ 22, де розраховуються миттєві положення маятників 3, 5, 7, 8 за величиною різниці сигналів від датчиків їх положення 13-20, після чого за відповідними тарувальними залежностями перераховуються значення спочатку проекцій, а потім і вектора лінійних та кутових прискорень та кутового положення. Результати цих обчислень відображаються на дисплеї 23 і паралельно на пристрої візуалізації 25. У випадку перевищення допустимих значень кутів та заданих допустимих величин прискорень вмикається звукова сигналізація 24. Запропонований спосіб та прилад, що його реалізує, дозволяють визначити кутові положенні морського рухомого об'єкта незалежно від діючих прискорень, а також за математичною моделлю та даними тарування розраховувати вектори лінійних та кутових прискорень. На відміну від способу, що реалізовано у осцилографі Бертона при великих масах та габаритах, прилад, який реалізує даний спосіб, дозволяє використовувати маятники з малими лінійними розмірами та масою. За допомогою мікропроцесорних засобів та критеріїв безпеки суден обробляється інформація та прогнозується стан судна при хвилюванні та поривах вітру з урахуванням фактичного кутового положення судна, що дозволяє формувати рекомендації з подальшого маневрування для унеможливлення перевертання судна. Використана інформація: 1. Клюев В.В. Приборы и системы для измерения вибрации, шума и удара / под ред. В.В. Клюева. - М.: Машиностроение, 1978. - 448 с. 2. Артманов В.В. Устройство аварийной сигнализации при качке судна, а.с. СССР № 1066887, БИ № 2, 1984 г. 3. Александров М.Н. Устройство для определения ускорений любой точки судна / Н.М. Александров, Ю.Д. Жуков, В.А. Некрасов, А.Ф. Галь, И.А. Алешин, Г.Г. Амплеев, А.К. Снигур. // а.с. СССР № 1816968, БИ № 19, 1993 г. ФОРМУЛА ВИНАХОДУ 1. Спосіб визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта за абсолютними та відносними положеннями декількох маятників, який відрізняється тим, що створюють рівнодіючі сили, які забезпечують діаметрально протилежні напрями орієнтації у просторі першої системи маятників так, що вони займають у положенні 5 UA 110076 C2 5 10 15 20 25 30 35 40 45 50 55 60 рівноваги за рахунок сил різної фізичної природи, а також при цьому забезпечують незмінність положень рівноваги при обертанні з постійною кутовою швидкістю двох з них та обертанні інших двох на кут, що дорівнює куту повороту приладу у цілому за умов спокою осі, або її рівномірного прямолінійного руху, або рівномірного обертання приладу навколо загальної горизонтальної осі маятників, що лежить у повздовжній площині, або руху приладу з постійною лінійною швидкістю у поперечній площині судна, при цьому одночасно створюють рівнодіючі сили, які забезпечують різні діаметрально протилежні напрями орієнтації у просторі для другої системи маятників так, що вони займають у положенні рівноваги за рахунок сил різної фізичної природи, а також при цьому забезпечують незмінність положень рівноваги при обертанні з постійною кутовою швидкістю двох з них та обертанні інших двох на кут, що дорівнює куту повороту приладу у цілому навколо загальної горизонтальної осі маятників, що лежить у поперечній площині, за умов спокою осі, або її рівномірного прямолінійного руху, або руху приладу з постійною лінійною швидкістю у повздовжній площині судна; а також одночасно створюють рівнодіючі сили, які забезпечують різні діаметрально протилежні напрями орієнтації у просторі двох додаткових маятників так, що вони займають у положенні рівноваги за рахунок сил різної фізичної природи та магнітної стрілки, а також обертання їх двох на кут, що дорівнює куту повороту приладу у цілому за умов спокою або руху приладу з постійною лінійною швидкістю у горизонтальній площині навколо їх загальної вертикальної осі, створюють умови для швидкого забезпечення затухання коливань маятників навколо кожної з власних осей для усіх трьох систем, фіксують миттєві положення неконтактними засобами одразу усіх маятників у просторі, тарують окремо прискорення обертальних та поступальних рухів приладу у цілому за показниками еталонних приладів вимірювання проекцій векторів кутових положень і прискорень та лінійних прискорень за результатами визначення відносних кутових положень маятників по їх кутових положеннях у просторі та положеннях рівноваги за заданий проміжок часу, розраховують проекції прискорень по відносних кутових положеннях пристроями для розрахунку за відомими алгоритмами та даними тарування, визначають за положеннями рівноваги маятників за заданий проміжок часу проекції вектора кутового положення судна або іншого морського рухомого об'єкта за допомогою пристроїв для розрахунку та даними тарування. 2. Прилад визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта, що реалізує спосіб по пункту 1, який містить корпус, маятники, що здатні вільно коливатися навколо осі і які зібрано у блоки, який відрізняється тим, що таких блоків маятників три, у першому блоці два маятники позитивної та негативної плавучості шарнірно розміщені на спільній вісі діаметрально протилежно за напрямами орієнтації положення рівноваги догори та до долу відповідно, яке вони займають у стані спокою або прямолінійного рівномірного руху, а інші два маятники нульової плавучості займають відносно тієї ж спільної осі горизонтальне протилежно-орієнтоване один до одного положення рівноваги, яке є незмінним відносно корпусу приладу, загальна вісь чотирьох маятників лежить у горизонтальній площині за повздовжнім напрямом, другий блок обладнано двома маятниками позитивної та негативної плавучості, які шарнірно розміщені на спільній осі діаметрально протилежно за напрямами орієнтації догори та до долу відповідно, яке вони займають у положенні рівноваги, а інші два маятники нульової плавучості займають відносно тієї ж спільної осі горизонтальне, протилежно орієнтоване один до одного положення рівноваги, яке є незмінним відносно корпусу приладу, загальна вісь чотирьох маятників лежить у горизонтальній площині за поперечним напрямом, а третій блок маятників має магнітну стрілку та два горизонтальних маятники нульової плавучості, які займають відносно тієї ж спільної вертикальної осі горизонтальне, протилежно-орієнтоване один до одного положення рівноваги, яке є незмінним відносно корпусу приладу, і які вільно обертаються навколо загальної осі; маятники містять отвори, у яких закріплено елементи плавучості; корпуси блоків, у яких закріплено осі та розміщено маятники, виготовлено із феромагнітних матеріалів або екрановано замкненими оболонками із неферомагнітних матеріалів, їх оснащено компенсаторами та залито прозорою рідиною, у них містяться датчики визначення кутового положення маятників, які з'єднано через інтерфейс АЦП з ПЕОМ, виходи з якої з'єднано з дисплеєм та через ЦАП з індикатором та реле із звуковою сигналізацією. 3. Прилад визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об'єкта за п. 2, який відрізняється тим, що горизонтальні маятники третього блока з вертикальною віссю містять магніти, а для кожного з них з двох боків розташовано однойменними полюсами магніти, а магнітна стрілка реалізована як третій маятник, який виконано як мініатюрний гіроскоп, який шарнірно розміщено на спільній осі маятників третього блока, напрям якого задається та корегується через ПЕОМ, для одночасної фіксації кутового положення маятників передбачені системи відеоспостереження, виходи з яких заведено до ПЕОМ. 6 UA 110076 C2 7 UA 110076 C2 8 UA 110076 C2 9 UA 110076 C2 10 UA 110076 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for the determination of angular location vector, linear and angular accelerations of marine movable object
Автори англійськоюTrunov Oleksandr Mykolaiovych
Назва патенту російськоюСпособ определения вектора угловых положений, линейных и угловых ускорений морского подвижного объекта и прибор, который его реализует
Автори російськоюТрунов Александр Николаевич
МПК / Мітки
МПК: G01C 19/24, G01C 19/42, G01P 15/18, B63B 39/14, G01C 21/06
Мітки: об'єкта, визначення, лінійних, положень, морського, рухомого, реалізує, кутових, вектора, спосіб, прилад, прискорень
Код посилання
<a href="https://ua.patents.su/13-110076-sposib-viznachennya-vektora-kutovikh-polozhen-linijjnikh-ta-kutovikh-priskoren-morskogo-rukhomogo-obehkta-ta-prilad-shho-jjogo-realizueh.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення вектора кутових положень, лінійних та кутових прискорень морського рухомого об’єкта та прилад, що його реалізує</a>
Спосіб визначення кутових положень з використанням автогенераторних магніточутливих пристроїв
Номер патенту: 97242
Опубліковано: 10.03.2015
Автори: Осадчук Олександр Володимирович, Білилівська Ольга Петрівна, Осадчук Володимир Степанович
МПК: G01B 7/00
Мітки: спосіб, визначення, пристроїв, магніточутливих, кутових, використанням, автогенераторних, положень
Формула / Реферат:
Спосіб визначення кутових положень з використанням автогенераторних магніточутливих пристроїв, у якому кутове положення контрольованого об'єкту перетворюють за допомогою постійного магніту з діаметральним намагніченням у магнітну індукцію, яка залежить від кутового положення за синусоїдальним законом, значення кутового положення розраховують за виміряним значенням магнітної індукції, який відрізняється тим, що магнітну індукцію перетворюють...
Трикомпонентний аналоговий акселерометр вектора лінійного прискорення з електромеханічним захистом від кутових прискорень
Номер патенту: 92733
Опубліковано: 26.08.2014
Автор: Тіняков Валерій Георгійович
МПК: G01P 15/00
Мітки: прискорень, лінійного, вектора, акселерометр, захистом, аналоговий, прискорення, електромеханічним, кутових, трикомпонентний
Формула / Реферат:
1. Трикомпонентний (X, Υ, Ζ,) аналоговий акселерометр вектора лінійного прискорення з електромеханічним захистом від кутових прискорень з трьома балками, ортогональна деформація яких реєструється тензорезисторами, що виконані за інтегральною технологією, балки і центри ваги їх інерційних мас рознесені в просторі, механічно об'єднані, але не інтегровані, який відрізняється тим, що кінематику акселерометра виконано як замкнену,...
Спосіб вимірювання прискорень на обресорених частинах рухомого складу
Номер патенту: 32264
Опубліковано: 15.12.2000
Автори: Оптовець Світлана Петрівна, Михайленко Віталій Михайлович, Сапарова Лариса Сергійовна, Мямлін Сергій Віталійович, Блохін Євген Петрович
МПК: B61C 11/00, G01P 15/00
Мітки: частинах, прискорень, вимірювання, обресорених, спосіб, рухомого, складу
Текст:
...буде Uj_=k- g- sin ф. Якщо транспортний засіб рухається, кутові коливання, як правило, з'являються відносно усіх трьох вісей просторової системи координат. Якщо прийняти, що вісь Z спрямована вертикально, паралельно силі земного тяжіння, вісь X - спрямована вздовж шляху руху, вісь Y - упоперек шляху, то вихідний сигнал датчика, вимірю вальна вісь якого спрямована вздовж вісі Z, є сумою двох сигналів, сигналу відповідного лінійному...
Спосіб визначення лінійних та кутових показників кривизни хребта
Номер патенту: 77676
Опубліковано: 25.02.2013
Автори: Лазарев Ігор Альбертович, Мелешко Владислав Валентинович
МПК: A61B 5/00
Мітки: лінійних, кутових, хребта, спосіб, показників, визначення, кривизни
Формула / Реферат:
Спосіб визначення лінійних та кутових показників кривизни хребта, який включає обстеження хворого у вихідному положенні стоячи, сидячи, нахилу тулуба або лежачи з використанням спеціального пристрою для визначення величини кутів кривизни хребта, який відрізняється тим, що пристрій розміщують на чотири точки опори у проекції сьомого шийного хребця і, натиснувши кнопку "старт", пересувають його вздовж хребта по лінії остистих...
Спосіб формування кутових мікропереміщень вала п’єзоелектричного двигуна та п’єзоелектричний двигун, що його реалізує
Номер патенту: 67848
Опубліковано: 15.07.2004
Автор: Петренко Сергій Федорович
МПК: H02N 2/00, H01L 41/09
Мітки: п'єзоелектричний, формування, кутових, п'єзоелектричного, спосіб, мікропереміщень, реалізує, двигуна, двигун, вала
Формула / Реферат:
1. Спосіб формування кутових мікропереміщень вала п’єзоелектричного двигуна, що включає формування пускового моменту за допомогою зворотного п’єзоелектричного ефекту, який відрізняється тим, що кутові мікропереміщення формують з ділянки розгону, на якій прикладено пусковий момент і ділянки гальмування при знятті пускового моменту, при цьому кутові мікропереміщення вала на ділянці розгону формують у відповідності з рівнянням
Попередній патент: Спосіб тестування фоточутливих багатошарових структур
Наступний патент: Метантенк
Випадковий патент: Сцинтиляційний матеріал на основі йодистого кадмію