Спосіб вимірювання прискорень на обресорених частинах рухомого складу
Номер патенту: 32264
Опубліковано: 15.12.2000
Автори: Оптовець Світлана Петрівна, Блохін Євген Петрович, Сапарова Лариса Сергійовна, Мямлін Сергій Віталійович, Михайленко Віталій Михайлович
Текст
MT[K6:G01P 15/08 Спосіб вимірювання прискорень обресорених частиігрухомого складу Винахід стосується залізничного транспорту, зокрема, оцінки динамічних (ходових) якостей рухомого складу. У процесі експериментальних досліджень вимірюють лінійні прискорення окремих елементів рухомого складу, наприклад, обресорених частин. При цьому прискорення, як правило, визначають (виміряють) у трьох напрямках згідно з вісями просторової системи координат: повздовжньому (X), поперечному (у), та вертикальному (2). Для цього датчики прискорень встановлюють на об'єкті, наприклад, на підлозі кузова залізничного вагона, орієнтуючи їх відповідно вісям системи координат. Але при русі об'єкту неминуче виникають кутові переміщення його елементів і тому традиційні способи вимірювання прискорень мають певні погрішності. Відомий спосіб вимірювання прискорень, коли датчики прискорень встановлені на кузові у зоні п'ятника або ж у середній частині кузова («Вагоны грузовые и пассажирские. Методы испытания на прочность и ходовые качества, ) РД 24.05 ,7.95 . Однак на датчики прискорень, окрім вимірюваних прискорень, діє також гравітаційне поле Землі, тому сигнал на виході датчика є векторною сумою двох складових. Перша - це лінійне прискорення, яке діє на датчик, а друга - це величина пропорційна проекції вектора прискорення земного тяжіння на вісь, що збігається з вимірювальною віссю датчика, який при русі об'єкту здійснює також і кутові переміщення у вертикальній площині. Таким чином, при кутових переміщеннях у гравітаційному полі Землі на виході датчика лінійних прискорень з'являється додатковий сигнал, викликаний кутовими переміщеннями. Отже, друга складова і є джерелом погрішностей при вимірюванні прискорень. Цей додатковий сигнал вносить суттєві погрішності при вимірюванні малих (0,1-0,3) g прискорень, що характерно для низькочастотних динамічних процесів, наприклад, при дослідженні ходових якостей пасажирських вагонів. Якщо вимірювальна вісь датчика паралельна силі земного тяжіння, то величина додаткового сигналу (Ц) може бути визначена рівнянням: Upk- g- cos ф, де k - чутливість датчика, g прискорення земного тяжіння, ф - кут нахилу вимірювальної вісі датчика у вертикальній площині відносно земної поверхні. Якщо вимірювальна вісь датчика перпендикулярна вектору g, тобто знаходиться у горизонтальній площині, то величина додаткового сигналу (Uj_) буде Uj_=k- g- sin ф. Якщо транспортний засіб рухається, кутові коливання, як правило, з'являються відносно усіх трьох вісей просторової системи координат. Якщо прийняти, що вісь Z спрямована вертикально, паралельно силі земного тяжіння, вісь X - спрямована вздовж шляху руху, вісь Y - упоперек шляху, то вихідний сигнал датчика, вимірю вальна вісь якого спрямована вздовж вісі Z, є сумою двох сигналів, сигналу відповідного лінійному прискоренню у цьому напрямку та сигналу відповідного кутовим переміщенням датчику відносно вісі X та вісі Y: 2=2лін+их+иу , де Z - прискорення виміряне датчиком, встановленим вздовж вісі Z, 2ЛШ - дійсне лінійне прискорення у цьому напрямку, UXJ Uy - сигнали відповідні кутовим переміщенням датчика відносно вісей X та Y. Аналогічно, вихідний сигнал датчиків, вимірювальна вісь яких спрямована вздовж вісі X, є сумою сигналу, власно лінійного прискорення вздовж вісі Y та сигналу Ux, який відповідає кутовим переміщенням відносно вісі Y: X = Xnia+Uy , ДЄ X - прискорення виміряне датчиком, встановленим вздовж вісі X, ^ЛІН - дійсне лінійне прискорення у цьому напрямку. Вихідний сигнал датчика, вимірювальна вісь якого спрямована вздовж вісі Y, є сумою сигналу лінійного прискорення вздовж вісі Y та сигналу Ux, відповідного кутовим переміщенням відносно вісі X: У=Улін+их де у - прискорення виміряне датчиком, встановленим вздовж вісі Y, Улш - дійсне лінійне прискорення у цьому напрямку. Таким чином, з приведених рівнянь видно, що вихідні сигнали датчиків прискорень складаються з двох складових: корисного сигналу, відповідного справжньому прискоренню та додаткового сигналу, який відповідає кутовому переміщенню. -4При вищеприведеному способі вимірювання звільнитись від складової, яка спричиняється нахилом кузова у процесі руху, неможливо. Найбільш близьким аналогом до заявляемого винаходу є спосіб вимірювання прискорень, який полягає у тому, що на обресорених частинах рухомого складу у вибраних напрямках вимірюють прискорення (ОСТ 24.050.16-85 «Вагоны пассажирские. Методика определения плавности хода» ). Але згідно з вищевикладеним цей спосіб має відносно низьку точність через наявність у сигналах датчиків складових, які викликані нахилом кузова у процесі руху. З вищеприведених рівнянь видно, що Улін™У - Ux 7 = 7 ТТ ТТ Суть винаходу складається в тому, що за допомогою датчиків прискорень, встановлених згідно з вибраними напрямками, вимірюють величини прискорень, а також додатково вимірюють кутові переміщення і з сигналів датчиків прискорень віднімають сигнали відповідних по напрямку датчиків кутових переміщень, по одержаній різниці судять про дійсні значення лінійних прискорень. Запропонований спосіб може бути використаним усюди, де треба вимірювати прискорення на обресорених частинах залізничного рухомого складу без додаткових затрат.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for evaluation of dynamical characteristics of movable stock
Автори англійськоюBlokhin Yevhen Petrovych, Mykhailenko Vitalii Mykhailovych, Miamlin Serhii Vitaliiovych, Optovets Svitlana Petrivna, Saparova Larysa Serhiivna
Назва патенту російськоюСпособ измерения ускорений на обрессоренных частых подвижного состава
Автори російськоюБлохин Евгений Петрович, Михайленко Виталий Михайлович, Мямлин Сергей Витальевич, Оптовец Светлана Петровна, Сапарова Лариса Сергеевна
МПК / Мітки
МПК: B61C 11/00, G01P 15/00
Мітки: спосіб, рухомого, прискорень, обресорених, складу, вимірювання, частинах
Код посилання
<a href="https://ua.patents.su/4-32264-sposib-vimiryuvannya-priskoren-na-obresorenikh-chastinakh-rukhomogo-skladu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання прискорень на обресорених частинах рухомого складу</a>
Пристрій для закріплення рухомого залізничного складу
Номер патенту: 28603
Опубліковано: 16.10.2000
Автори: Безверхій Віталій Григорович, Спіцин Василь Олександрович, Іончиков Анатолій Миколайович, Єрмак Сергій Миколайович, Потапов Ігор Ілліч
МПК: B61D 7/16
Мітки: залізничного, пристрій, складу, закріплення, рухомого
Формула / Реферат:
Пристрій для закріплення рухомого залізничного складу, що містить раму, змонтовану в колії поміж рейками, рухому каретку з пружинними блоками, пару закріплюючих балок, кожна з яких шарнірно з¢єднана за допомогою двох тяг з пружинними блоками рухомої каретки, механізм підвіски закріплюючих балок, включаючий вигнуті важелі та кронштейни, шарнірно з¢єднані між собою, датчик положення залізничного складу, блок обмеження повздовжнього...
Автоматизований пристрій для закріплення рухомого складу залізничного транспорту
Номер патенту: 14982
Опубліковано: 04.03.1997
Автори: Потапов Ігор Ільіч, Літвінцев Микола Олексійович, Шевченко Віктор Михайлович, Новіков Григорій Іванович, Каплун Микола Дмитрович, Іончиков Анатолій Миколайович, Безверхій Віталій Григорович
МПК: B61K 7/00
Мітки: рухомого, складу, транспорту, залізничного, автоматизований, закріплення, пристрій
Формула / Реферат:
1 Автоматизированное устройство для закрепления подвижного железнодорожного состава, включающее привод с блоком управления и источником литания, датчик положения железнодорожного состава с контактными элементами, датчик положения подвижного закрепляющего модуля с контактными элементами и ограничителями хода и блок сигнализации с другим источником питания, отличающееся тем, что блок управления приводом включает размыкающий ключевой...
Спосіб навантаження сепараторів великогабаритних роликопідшипників рухомого складу при випробуваннях і пристрій для його здійснення
Номер патенту: 13800
Опубліковано: 15.08.2000
Автори: Божко Олександр Євгенович, Гайдамака Анатолій Володимирович, Ляшенко Володимир Іванович, Федоров Олександр Іванович, Андрієвський Володимир Григорович
МПК: G01M 7/02, G01M 13/00
Мітки: рухомого, складу, навантаження, випробуваннях, сепараторів, роликопідшипників, здійснення, спосіб, великогабаритних, пристрій
Формула / Реферат:
1. Способ нагружения сепараторов крупногабаритных роликоподшипников подвижного состава при испытаниях, заключающийся в приложении к жестко закрепленному сепаратору с закрепленным, в свою очередь, на его перемычках дополнительным грузом переменной динамической нагрузки, изменяющейся по гармоническому закону, отличающийся тем, что указанную переменную динамическую нагрузку прикладывают к перемычкам сепаратора, расположенным в начале и...
Додаткова сходинка для залізничного рухомого складу
Номер патенту: 1856
Опубліковано: 20.12.1994
Автор: Курт Кауер
МПК: B61D 23/00
Мітки: складу, додаткова, залізничного, рухомого, сходинка
Формула / Реферат:
1. Дополнительная ступенька для железнодорожного подвижного состава, регулируемая по высоте и подвижная в почти горизонтальном положении, содержащая приводной рычажный механизм, связанный с площадкой тамбура, ось поворота которой расположена поперек подвижного состава и через точку поворота приводного элементу механизма связана с приводным валом, на котором закреплены одноплечие рычаги указанного механизма, другие концы которых соединены...
Переносний пристрій для закріплення рухомого складу на залізничних коліях
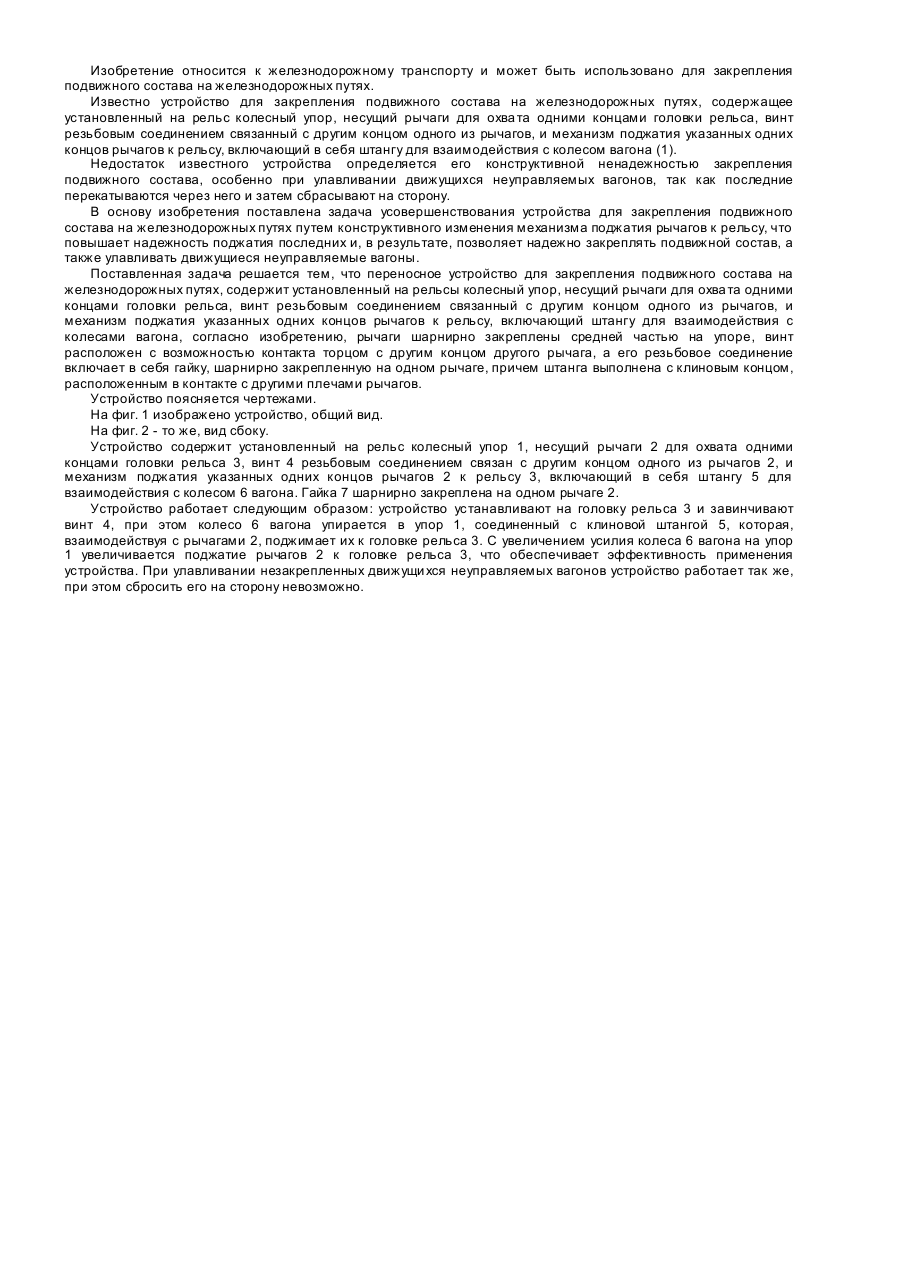
Номер патенту: 3075
Опубліковано: 26.12.1994
Автори: Шумейко Василь Андрійович, Чеботарьов Григорій Аврамович
МПК: B61K 7/00
Мітки: переносний, закріплення, коліях, складу, залізничних, пристрій, рухомого
Формула / Реферат:
Переносное устройство для закрепления состава на железнодорожных путях, содержащее установленный на рельсы колесный упор, несущий рычаги для охвата одними концами головку рельса, винт, резьбовым соединением связанный с другим концом одного из рычагов, и механизм поджатия указанных одних концов рычагов к рельсу, включающий в себя штангу для взаимодействия с колесом вагона, отличающееся тем, что рычаги шарнирно закреплены средней частью на...
Попередній патент: Спосіб діагностики некрозу при гострій кишковій непрохідності
Наступний патент: Пристрій для полімеризації стоматологічних базисних пластмас
Випадковий патент: Пристрій для дослідження фотоелектронного парамагнітного резонансу